Изобретение относится к конвейерному транспорту, а именно к электрическим приводам уклонных ленточных конвейеров мощностью более 500 кВт.
Известен электрический привод ленточного конвейера, содержащий два или три приводных барабана, валы которых посредством муфт и редукторов соединены с электродвигателями, тормозами [1].
Известен синхронный электропривод ленточного конвейера, включающий приводные барабаны, соединенные муфтами с синхронными электродвигателями, отклоняющие барабаны, тормоза, систему электропитания и управления конвейером, содержащую датчики скорости ленты и датчики натяжения ленты, установленные перед и/или за приводными барабанами [2].
Из-за протяженного наклонного участка конвейера сила натяжения ленты в хвостовой части конвейера меньше силы натяжения ленты, сбегающей с последнего приводного барабана. Поэтому для поддержания необходимого натяжения ленты в хвостовой части конвейера требуется большое натяжение ленты, сбегающей с последнего приводного барабана. Это приводит к сильному натяжению ленты в месте набегания на первый приводной барабан. Недостатком приводов [1, 2] является использование дорогой и тяжелой высокопрочной конвейерной ленты.
Известны электрические приводы уклонных ленточных конвейеров, содержащие приводные и отклоняющие барабаны, огибаемые порожняковой ветвью ленты [3].
Недостатком таких приводов также является сильное натяжение ленты и необходимость использования высокопрочной конвейерной ленты.
Задачей изобретения является уменьшение требуемой прочности ленты конвейера.
Электрический привод уклонного ленточного конвейера, включающий огибаемые грузовой и/или порожняковой ветвями ленты приводные и отклоняющие барабаны, установленные на раме конвейера, приводные барабаны через редукторы или без них соединены с электродвигателями и тормозами, электродвигатели подключены к системе электропитания и управления конвейером.
Согласно изобретению электрический привод содержит дополнительный барабан, огибаемый порожняковой ветвью ленты и соединенный через мультипликатор или без него с электрогенератором, передающим электроэнергию системе электропитания и управления конвейером.
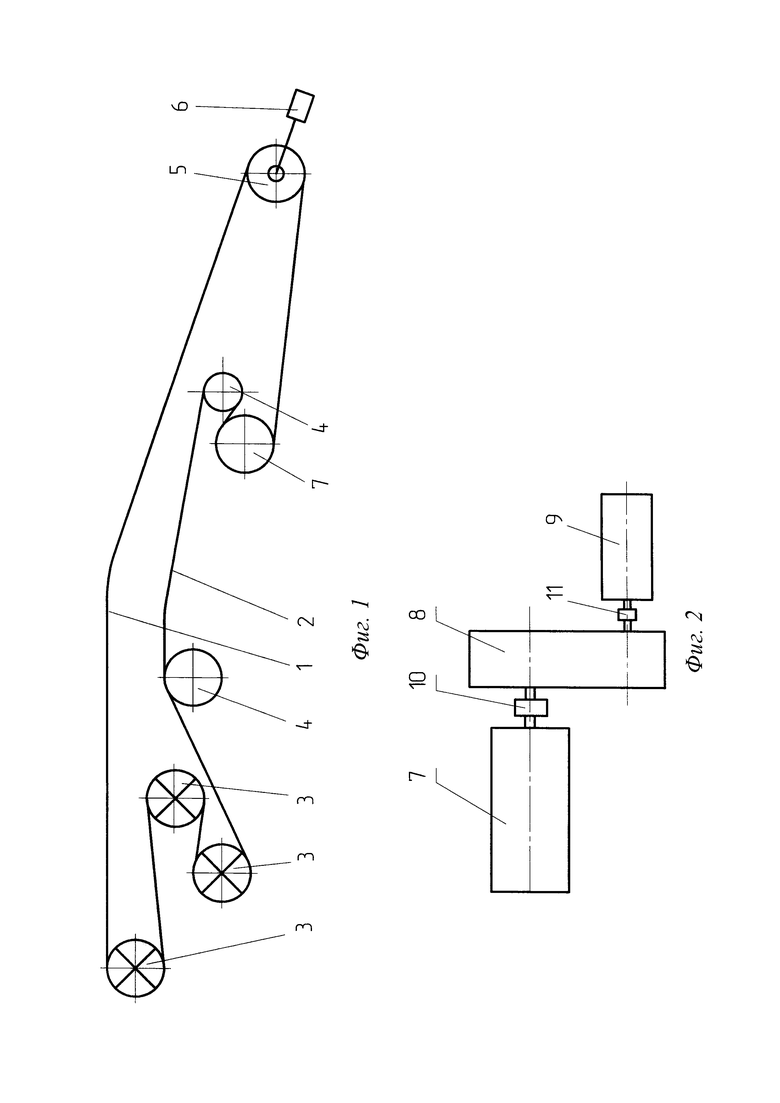
На фиг. 1 изображена схема системы электрических приводов уклонного ленточного конвейера с тремя приводными барабанами;
на фиг. 2 - схема соединения дополнительного барабана с электрогенератором через мультипликатор;
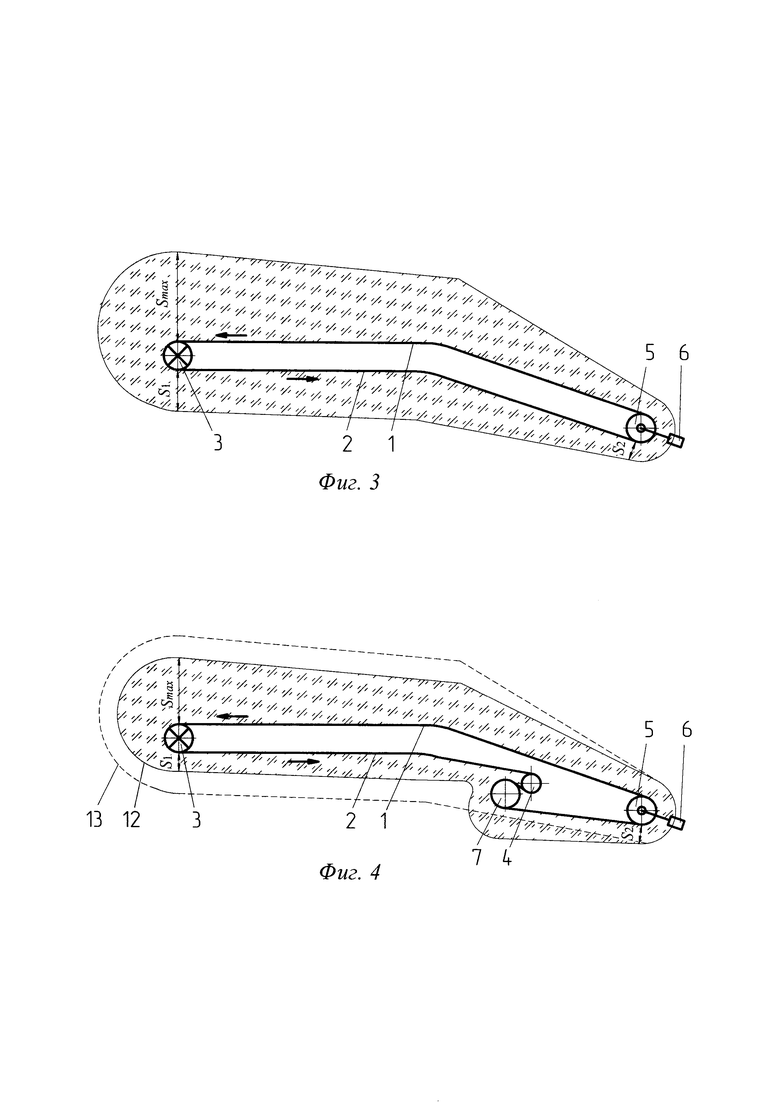
на фиг. 3 - эпюра натяжения ленты уклонного конвейера без дополнительного барабана;
на фиг. 4 - эпюра натяжения ленты уклонного конвейера с дополнительным барабаном.
Электрический привод уклонного ленточного конвейера включает огибаемые грузовой 1 и/или порожняковой 2 ветвями ленты приводные 3, отклоняющие 4 и натяжной 5 барабаны, установленные на раме конвейера. В зависимости от расположения мест загрузки и разгрузки конвейера, мест установки приводных барабанов 3 огибающая их лента может принадлежать грузовой 1 или порожняковой 2 ветви.
Приводные барабаны 3 через редукторы или без них соединены с электродвигателями, тормозами, храповыми остановами (на чертежах не показано). Натяжной барабан 5 соединен с натяжным устройством 6. Электродвигатели подключены к системе электропитания и управления конвейером (на чертежах не показана).
Электрический привод уклонного ленточного конвейера содержит дополнительный барабан 7, огибаемый порожняковой ветвью 2 ленты и соединенный через мультипликатор 8 или без него с электрогенератором 9, передающим электроэнергию системе электропитания и управления конвейером.
На фиг. 2 приведена схема соединения дополнительного барабана 7 с мультипликатором 8 муфтой 10 и мультипликатора 8 с электрогенератором 9 муфтой 11. Соединение дополнительного барабана 7 с мультипликатором 8 возможно предохранительной или управляемой муфтой 10. Возможно соединение дополнительного барабана 7 непосредственно с электрогенератором 9 общим валом (на чертежах не показано).
На фиг. 3 приведена эпюра натяжения ленты уклонного конвейера с одним приводным барабаном 3 в головной части конвейера и натяжным барабаном 5 в хвостовой части конвейера. Стрелками указано направление движения грузовой 1 и порожняковой 2 ветвей ленты. На фиг. 3 и фиг. 4 для упрощения изображен один приводной барабан 3, поскольку наличие нескольких приводных барабанов 3 в головной части конвейера вид эпюры натяжения ленты не изменяет.
Силу натяжения ленты в хвостовой части конвейера S2 вычисляют через силу натяжения ленты S1, сбегающей с последнего приводного барабана, по формуле

где q0 - погонный вес ленты (Н/м), ω0 - коэффициент сопротивления движению порожняковой ветви ленты, β - угол наклона конвейера к горизонту, L - длина наклонного участка конвейера (м).
Из-за протяженного наклонного участка конвейера сила натяжения ленты в хвостовой части конвейера S2 меньше силы натяжения ленты S1, сбегающей с последнего приводного барабана при β>arctgω0. Например, если ω0=0,03, то β>1,72°.
При установке на порожняковой ветви ленты дополнительного барабана 7, соединенного с электрогенератором 9, дополнительный барабан 7 создает сопротивление движению ленты F, и эпюра натяжения ленты имеет вид, приведенный на фиг. 4. Сплошная линия 12 на фиг. 4 изображает величину силы натяжения ленты при наличии дополнительного барабана 7. Пунктирная линия 13 изображает величину силы натяжения ленты при отсутствии дополнительного барабана 7.
При наличии дополнительного барабана 7 силу натяжения ленты в хвостовой части конвейера S2 вычисляют по формуле

Из формул (1) и (2) следует, что установка на порожняковой ветви ленты дополнительного барабана 7, соединенного с электрогенератором 9, обеспечивает требуемую силу натяжения ленты в хвостовой части конвейера S2 при меньшей силе натяжения ленты S1, сбегающей с последнего приводного барабана 3.
Наибольшее натяжение Smax конвейерная лента имеет в месте набегания на первый приводной барабан 3.
Smax=S1+FΣ
где FΣ - суммарная сила тяги приводных барабанов (Н).
Таким образом, снижение силы натяжения ленты S1 приводит к снижению максимальной силы натяжения Smax и позволяет использовать конвейерную ленту меньшей прочности.
Энергия системы электрических приводов, затрачиваемая на преодоление дополнительного сопротивления движению ленты F, возвращается электрогенератором 9 в систему электропитания и управления конвейером.
При осуществлении изобретения может быть получен технический результат, заключающийся в повышении эффективности работы ленточного конвейера за счет использования менее прочной и более легкой ленты.
Источники информации, использованные при составлении заявки
1. Реутов А.А. Моделирование приводов ленточных конвейеров / А.А. Реутов. - Брянск: Брянский гос. техн. ун-т, 2011. - с. 7-14.
2. Патент 2606163, Российская федерация, МПК B65G 23/36. Синхронный электропривод ленточного конвейера и способ управления им. Заявл. 02.11.2015, опуб. 10.01.2017. Бюл. №1.
3. Шахмейстер, Л.Г. Подземные конвейерные установки / Л.Г. Шахмейстер, Г.И. Солод. - М.: Недра, 1976. с. 159, 233.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННЫЙ ЭЛЕКТРОПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2606163C1 |
| ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2013 |
|
RU2544461C1 |
| СПОСОБ НАВЕСКИ ГРУЗОНЕСУЩЕЙ И ПРИЖИМНОЙ ЛЕНТ КОНВЕЙЕРА | 2015 |
|
RU2579599C1 |
| ПРОМЕЖУТОЧНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2014 |
|
RU2552759C1 |
| ПРОМЕЖУТОЧНЫЙ ДВУХБАРАБАННЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2011 |
|
RU2458841C1 |
| ПРОМЕЖУТОЧНЫЙ БАРАБАННЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2011 |
|
RU2458840C1 |
| СПОСОБ МОНТАЖА ПРИЖИМНОЙ ЛЕНТЫ КОНВЕЙЕРА | 2016 |
|
RU2610316C1 |
| ПРОМЕЖУТОЧНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2016 |
|
RU2613947C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2405726C1 |
| Лебедка | 1987 |
|
SU1456355A1 |
Электрический привод уклонного ленточного конвейера включает огибаемые грузовой и/или порожняковой ветвями ленты приводные и отклоняющие барабаны, установленные на раме конвейера и соединенные через редукторы или без них с электродвигателями и тормозами. Электродвигатели подключены к системе электропитания и управления конвейером. Электрический привод содержит дополнительный барабан, огибаемый порожняковой ветвью ленты и соединенный через мультипликатор или без него с электрогенератором, передающим электроэнергию системе электропитания и управления конвейером. Обеспечивается возможность применения конвейерной ленты с уменьшенной прочностью. 4 ил.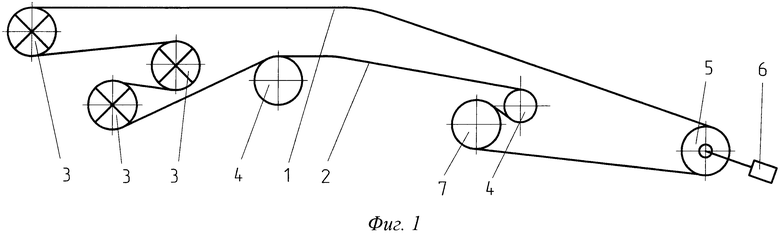
Электрический привод уклонного ленточного конвейера, включающий огибаемые грузовой и/или порожняковой ветвями ленты приводные и отклоняющие барабаны, установленные на раме конвейера, приводные барабаны через редукторы или без них соединены с электродвигателями и тормозами, электродвигатели подключены к системе электропитания и управления конвейером, отличающийся тем, что электрический привод содержит дополнительный барабан, огибаемый порожняковой ветвью ленты и соединенный через мультипликатор или без него с электрогенератором, передающим электроэнергию системе электропитания и управления конвейером.
| JP 58188215 A, 02.11.1983 | |||
| US 3326355 A1, 20.06.1967 | |||
| СРЕДСТВО ДЛЯ ЗАЩИТЫ ОТ ЗАГРЯЗНЕНИЙ И СТРОИТЕЛЬНАЯ ПЛИТА | 2006 |
|
RU2326098C2 |
| KR 101789964 B1, 26.10.2017 | |||
| CN 201458224 U, 12.05.2010 | |||
| US 5970712 A1, 26.10.1999 | |||
| JP 2012020811 A, 02.02.2012 | |||
| WO 2006124034 A1, 23.11.2006. | |||

