ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет предварительной заявки №62/215463 на патент США, поданной 8 сентября 2015 года, под названием ʺMethod of packaging and deploying marine vibratorʺ, включенной в эту заявку путем ссылки. Настоящая заявка является родственной по отношению к заявке №14/421006 на патент США, поданной 11 февраля 2015 года, и заявке №14/700879 на патент США, поданной 30 апреля 2015 года, каждая из которых подана под названием ʺCoherent sound source for marine seismic surveysʺ и каждая включена в эту заявку путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
В общем, настоящее изобретение относится к способу компоновки и развертывания низкочастотных подводных звуковых прожекторов, предназначенных для использования при морских сейсмических исследованиях.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Звуковые волны являются основным инструментом, используемым для поиска запасов нефти и газа в пластах Земли. Звуковые волны являются удобными, поскольку они могут распространяться на большие расстояния и проникать в сложные слоистые среды для получения важной информации относительно наличия, состава и физического размера запасов. Это относится к случаю исследований, проводимых как на суше, так и в воде. Хотя для возбуждения звуковых волн в воде используют разнообразные способы, основным способом в течение последних трех десятилетий является использование воздушных пушек, из которых инжектируются короткие выбросы воздуха под высоким давлением и которые представляют собой импульсный (то есть, некогерентный) источник акустической энергии. Волны проникают в пласты и различным образом отражаются обратно к поверхности, где их регистрируют с помощью группы приемников (то есть, гидрофонов).
Вообще говоря, морские сейсмические исследования выполняют при буксировке от 12 до 48 воздушных пушек в виде многочисленных подгрупп позади исследовательского судна на расстоянии от 300 до 500 м и на глубинах порядка от 1 до 10 м. Ряд поверхностных поплавков используют для подвешивания воздушных пушек (то есть, один поплавок на одну подгруппу) на заданной глубине. Кабель-шланг, содержащий силовые элементы, электрические силовые кабели, среду передачи дуплексных данных (то есть, медную или волоконно-оптическую линию связи) и шланг для воздуха под высоким давлением, используют для буксировки поверхностного поплавка с исследовательского судна. Дополнительное назначение кабеля-шланга заключается в направлении воздуха под высоким давлением к группе воздушных пушек, а также электрической энергии для регулирования различных характеристик группы, в обеспечении механизма управления группой и получения данных мониторинга с различных технических датчиков, подтверждающих удовлетворительную работу. Типичная скорость буксировки составляет от 1,5 до 2,5 м/с, что обеспечивает производительность исследований порядка 10 км2/день. Для получения дополнительной информации относительно морских сейсмических исследований, пожалуйста, обратитесь к ʺMarine Geophysical Operations: An Overviewʺ, International Association of Geophysical Contractors (June 2009) или ʺAn Overview of Marine Seismic Operationsʺ, International Association of Oil and Gas Producers, Report №447 (April 2011); каждый из этих источников включен в эту заявку путем ссылки.
В последние годы в нефтегазовой отрасли рассматриваются альтернативы воздушным пушкам и в частности, использование морских вибраторов, которых можно отнести к когерентным (то есть, не к импульсным) источникам акустической энергии. Обычно применения и/или мотивации к использованию морских вибраторов вместо воздушных пушек вытекают из необходимости иметь лучшую сейсмическую сигнатуру при определенных глубоководных рабочих условиях, выполнении морских сейсмических исследований в районах с уязвимой природной средой и из необходимости иметь более совершенный источник для применений на мелководье (то есть, в переходной зоне), где группы воздушных пушек работают не оптимально. Кроме того, характерные особенности морских сейсмических исследований с вибраторами, которые являются привлекательными, включают в себя (1) наличие приводимой в действие по командам регулировки глубины погружения для уменьшения проблем, связанных с отношением сигнала к шуму на низких частотах и образованием волн-спутников, и (2) практически отсутствие изображения поверхности (то есть, плавучих масс льда), имея в виду, что 40% нефтегазовых запасов Земли находятся в Арктике, где плавающий лед является источником опасности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В иллюстративных вариантах осуществления настоящего изобретения представлены способы компоновки и развертывания морских вибраторов. В одном примере варианта осуществления морской вибратор содержит положительно плавучий гидродинамический буксируемый корпус, содержащий низкочастотный электроакустический прожектор; систему силовой электроники; систему электроники управления-мониторинга; и систему компенсации давления, при этом гидродинамический буксируемый корпус содержит одну или несколько активных управляющих поверхностей для регулирования глубины погружения и положения по крену гидродинамического буксируемого корпуса.
В по меньшей мере одном примере варианта осуществления морской вибратор содержит свободно заполняющуюся водой несущую раму, включающую внутренние компоненты, содержащие низкочастотный электроакустический прожектор; систему силовой электроники; систему электроники управления-мониторинга; и систему компенсации давления, при этом рама и внутренние компоненты делаются положительно плавучими за счет использования обладающего плавучестью пенопласта, расположенного в раме так, что центр плавучести рамы и внутренних компонентов находится на более высоком уровне, чем центр тяжести рамы и внутренних компонентов.
В одном или нескольких вариантах осуществления морской вибратор содержит свободно заполняющуюся водой несущую раму, содержащую низкочастотный электроакустический прожектор; систему силовой электроники; систему электроники управления-мониторинга; и систему компенсации давления, при этом морской вибратор является отрицательно плавучим и при этом глубина погружения морского вибратора регулируется при использовании одной или нескольких лебедок, расположенных на поверхностном поплавке, на котором подвешен морской вибратор. В по меньшей мере одном варианте осуществления точкой буксировки морского вибратора является передний конец поверхностного поплавка, тогда как в другом примере варианта осуществления точкой буксировки является передний конец рамы.
Как отмечалось выше, в иллюстративных вариантах осуществления, описанных в этой заявке, представлены значительные усовершенствования по сравнению с обычными морскими вибраторами, достигнутые за счет использования различных конфигураций плавучести в сочетании с соответствующими способами регулирования глубины погружения морских вибраторов. Эти и другие особенности и преимущества настоящего изобретения станут более понятными из сопровождающих чертежей и нижеследующего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
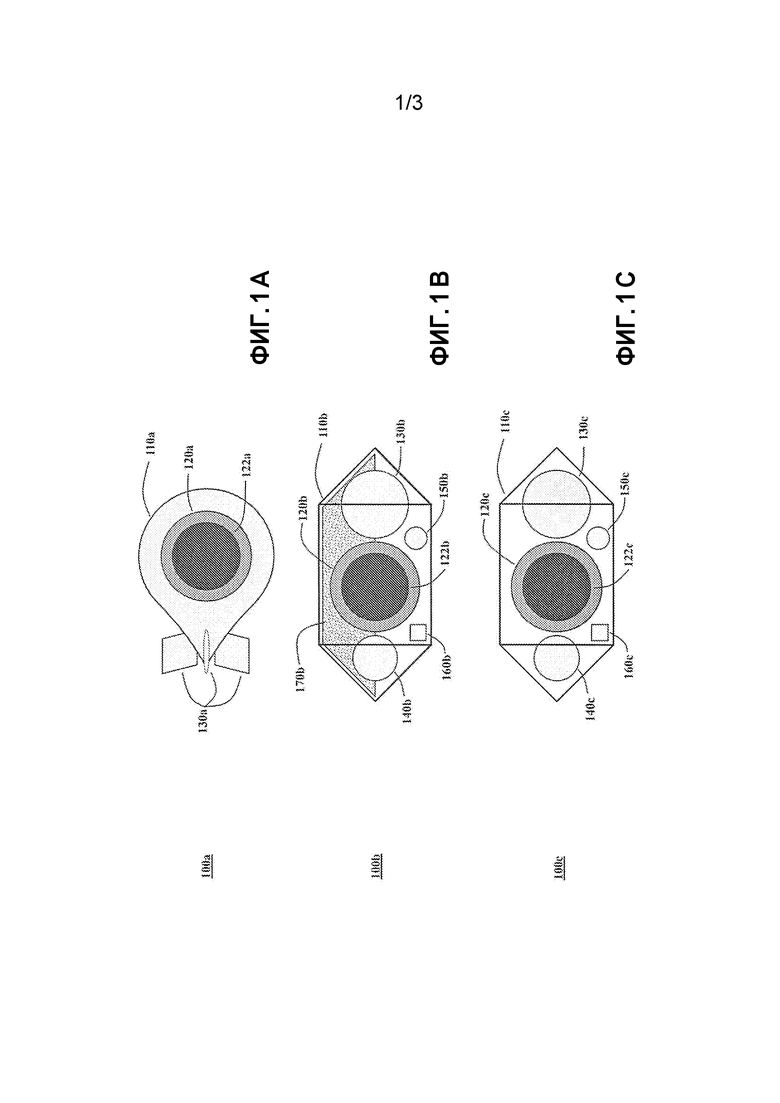
фиг. 1А-1С - вертикальные проекции с показом трех различных компоновок морского вибратора согласно примерам вариантов осуществления; и
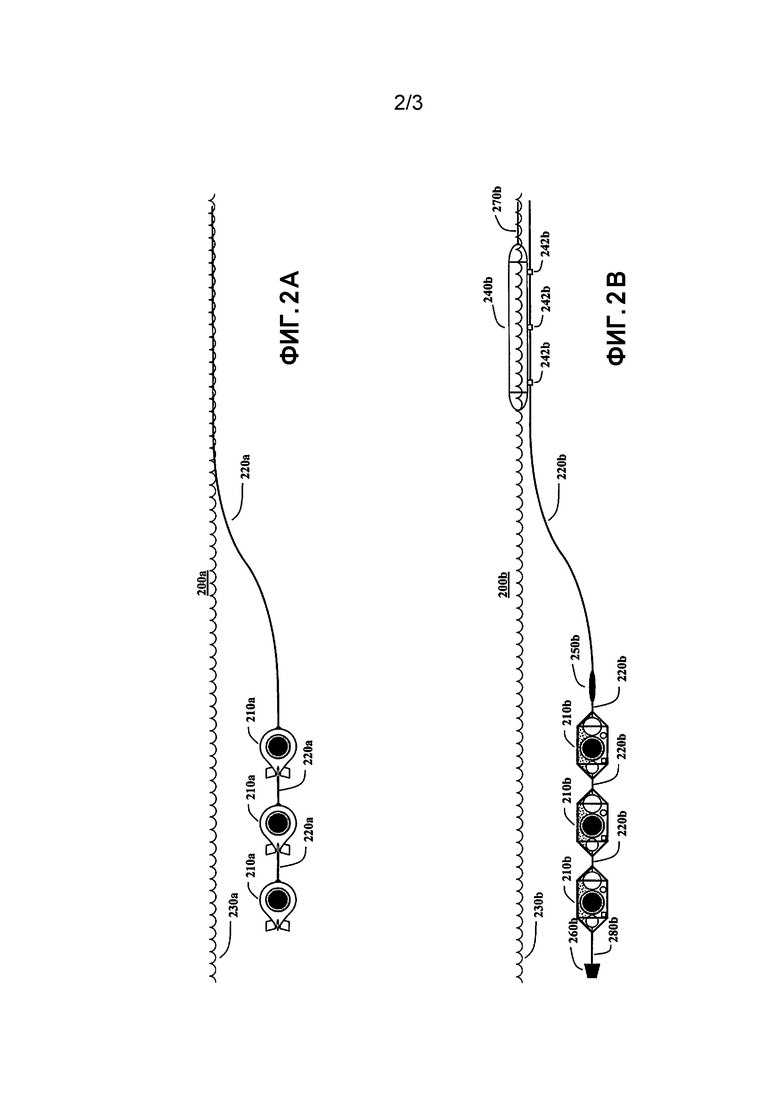
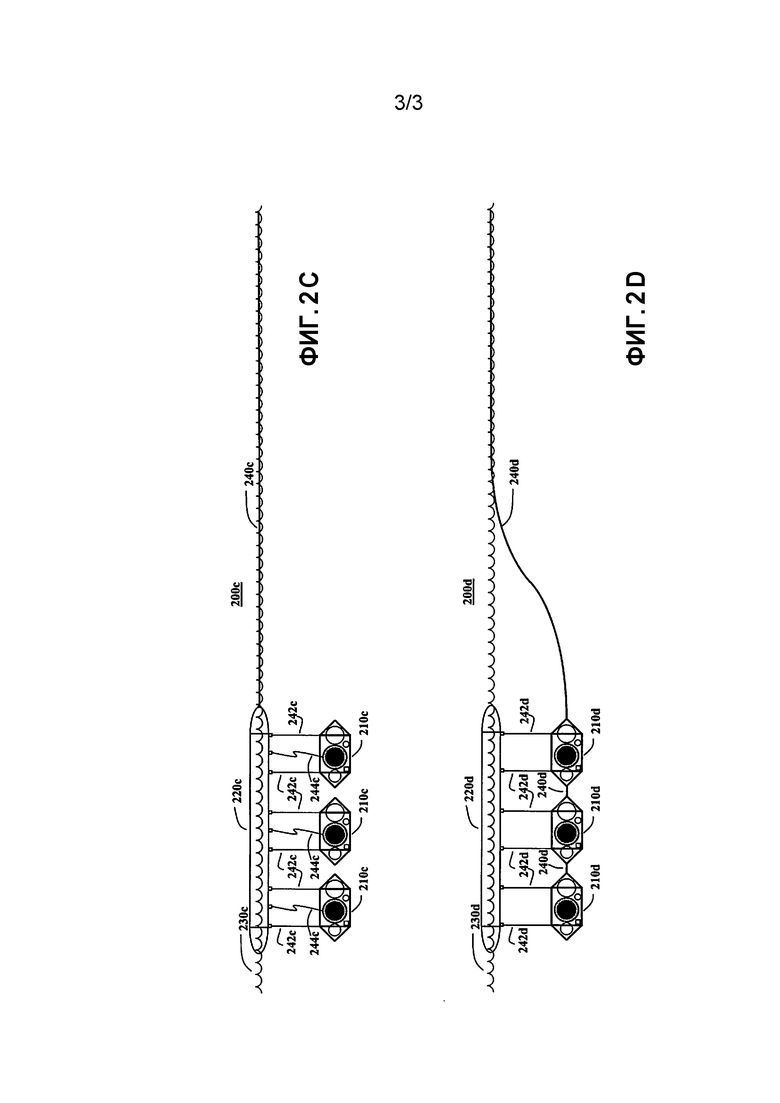
фиг. 2A-2D - вертикальные проекции с показом четырех различных развертываний подгруппы морских вибраторов согласно примерам вариантов осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Согласно аспектам настоящего изобретения предложены способы компоновки и развертывания морского вибратора, предназначенного для использования при морских сейсмических исследованиях. Представлены несколько примеров различных вариантов осуществления, в соответствии с которыми описано, каким образом морской вибратор компонуют и развертывают. В первом примере варианта осуществления, рассмотренном ниже в сочетании с фиг. 1А и 2А, компоненты, относящиеся к морскому вибратору (например, низкочастотный электроакустический прожектор, силовая электроника, электроника управления-мониторинга и средство компенсации давления) размещены в положительно плавучем гидродинамическом буксируемом корпусе, содержащем активные управляющие поверхности для регулирования глубины погружения и поддержания надлежащего положения по крену. Многочисленные морские вибраторы такой конструкции можно опционально располагать с образованием линейной группы, буксируемой исследовательским судном с помощью кабеля-шланга. Многочисленные линейные группы такого вида можно компоновать с образованием планарной или объемной группы.
Во втором примере варианта осуществления, рассмотренном ниже в сочетании с фиг. 1В и 2В, упомянутые выше компоненты морского вибратора размещены в свободно заполняющейся водой несущей раме (или ферме), в которой используется обладающий плавучестью пенопласт или некоторое эквивалентное средство, чтобы она была положительно плавучей. Положение обладающего плавучестью пенопласта в раме рассчитывают из условия обеспечения пассивного регулирования/стабильности крена благодаря тому, что центр плавучести находится на более высоком уровне, чем центр тяжести. Многочисленные морские вибраторы такой конструкции можно опционально располагать с образованием линейной группы, буксируемой исследовательским судном с помощью кабеля-шланга. Глубина погружения и прямолинейность группы регулируются благодаря использованию статических сил в вертикальном и горизонтальном направлениях, являющихся следствием действия поверхностного поплавка, кабеля-шланга, углубителя и плавучего конуса. Многочисленные линейные группы такого вида можно опционально компоновать с образованием планарной или объемной группы.
Во третьем примере варианта осуществления, рассмотренном ниже в сочетании с фиг. 1С и 2С, упомянутые выше компоненты размещены в свободно заполняющейся водой несущей раме (или ферме) без использования обладающего плавучестью пенопласта, поэтому морской вибратор делается положительно плавучим. Многочисленные морские вибраторы такой конструкции можно опционально располагать с образованием линейной группы, которую подвешивают к поверхностному поплавку, который, в свою очередь, буксируется исследовательским судном с помощью кабеля-шланга. Глубину погружения группы регулируют при использовании ряда лебедок, расположенных на поверхностном поплавке. Многочисленные линейные группы такого вида можно компоновать с образованием планарной или объемной группы.
В четвертом примере варианта осуществления, рассмотренном ниже в сочетании с фиг. 1С и 2D, упомянутые выше компоненты размещены в свободно заполняющейся водой несущей раме (или ферме) без использования обладающего плавучестью пенопласта, поэтому морской вибратор делается отрицательно плавучим. Многочисленные морские вибраторы этой конструкции можно опционально располагать с образованием линейной группы, которую подвешивают к поверхностному поплавку. Самый передний элемент в линейной группе служит точкой соединения для кабеля-шланга, который используется для буксировки с исследовательского судна. Глубину погружения группы регулируют при использовании ряда лебедок, расположенных на поверхностном поплавке. Многочисленные линейные группы такого вида можно опционально можно конфигурировать с образованием планарной или объемной группы.
На фиг. 1А представлен вид в вертикальном разрезе, показывающий первый пример варианта осуществления компоновки раскрываемого морского вибратора 100а. При взгляде снаружи на морской вибратор 100а видно, что морской вибратор 100а состоит из гидродинамического буксируемого корпуса 110а, в котором размещен электроакустический подводный звуковой прожектор 120а. В прожекторе применен податливо подвешенный поршень 122а, который при использовании преобразователя, находящегося внутри буксируемого корпуса 110а, создает в воде вибрации на низких частотах. Для более детального рассмотрения податливо подвешенных поршней см., например, C.H. Sherman and J.L. Butler, Transducers and Arrays for Underwater Sound, pages 51 and 54 (Springer, 1997).
Другие элементы, которые находятся в буксируемом корпусе 110а, включают в себя, но без ограничения, силовую электронику для формирования и усиления электрического аналога волнового сигнала, который используется для возбуждения преобразователя, электронику управления-мониторинга, которая представляет собой эффективное средство локального управления и мониторинга в реальном времени всех компонентов и подсистем, один или несколько баков-хранилищ (и связанных с ними трубопровода и цепочки клапанов), содержащих газ под высоким давлением, такой как сухой воздух или сухой азот, для уравновешивания поршня 122а при погружении в воду и один или несколько аккумуляторов в качестве временного источника электрической энергии для системы управления-мониторинга во время операций развертывания и поднятия на борт, когда, возможно, недоступна электроэнергия с исследовательского судна, с которого развертывают морской вибратор 110а.
Гидродинамические управляющие поверхности 130а используются для управления глубиной погружения буксируемого корпуса 110а, который рассчитан быть положительно плавучим. Кроме того, управляющие поверхности 130а представляют собой средство для поддержания надлежащего положения по крену буксируемого корпуса 110а, чтобы вектор силы от преобразователя, который возбуждает поршень 122а, был всегда перпендикулярен к вектору ускорения силы тяжести Земли. Благодаря этому податливо подвешенный поршень 122а не будет статически смещаться внутрь или наружу под действием силы тяжести.
На фиг. 1В представлен вид в вертикальном разрезе, показывающий второй пример варианта осуществления компоновки раскрываемого морского вибратора 100b. При взгляде снаружи на морской вибратор 100b видно, что морской вибратор 100b состоит из многочисленных компонентов, которые расположены внутри свободно заполняющейся водой несущей рамы (или фермы) 110b, которая служит буксируемым корпусом. Компоненты, показанные внутри рамы 110b, включают в себя электроакустический подводный звуковой прожектор 120b с податливо подвешенным поршнем 122b, модуль 130b силовой электроники, модуль 140b электроники управления-мониторинга, средство компенсации давления, включающее бак-хранилище 150b для сжатого газа, и аккумулятор 160b. Все эти компоненты обладают по существу такими же функциональными возможностями и характеристиками, как описанные в этой заявке для морского вибратора 100а. Основное различие заключается только в том, как они скомпонованы.
Морской вибратор 100b рассчитан быть положительно плавучим и в нем использован модуль 170b плавучести для компенсации веса других компонентов. Модуль 170b плавучести обычно представляет собой пенопласт с закрытыми ячейками, синтактический пеноматериал или заполненную воздухом оболочку. Модуль 170b плавучести расположен внутри рамы 110b так, что центр плавучести находится выше центра тяжести, чтобы к буксируемому корпусу мог прикладываться пассивный восстанавливающий момент для поддержания надлежащего положения по крену. В случае, когда желательно дополнительное регулирование крена, может быть добавлен вертикальный стабилизатор. Эти особенности, взятые в отдельности или совместно, исключают необходимость в активных управляющих поверхностях, описанных для морского вибратора 100а. Регулирование глубины погружения морского вибратора 100b описывается в этом разделе позднее. Кроме того, поскольку все компоненты содержатся в несущей раме, которая может быть оснащена демпфирующими удар опорами и амортизаторами, можно ожидать, что вариант 100b осуществления является более устойчивым к строгостям операции развертывания/поднятия на борт, чем вариант 100а осуществления.
На фиг. 1С представлен вид в вертикальном разрезе, показывающий третий пример варианта осуществления компоновки раскрываемого морского вибратора 100с. При взгляде снаружи на морской вибратор 100с видно, что морской вибратор 100с идентичен морскому вибратору 100b за исключением того, что в морском вибраторе 100с не использован модуль плавучести. Сам по себе морской вибратор 100с является отрицательно плавучим. В завершение, морской вибратор 100с содержит свободно заполняющуюся водой несущую раму 110с, электроакустический подводный звуковой прожектор 120с с податливо подвешенным поршнем 122с, модуль 130с силовой электроники, модуль 140с электроники управления-мониторинга, бак-хранилище 150с сжатого газа и аккумулятор 160с. Все эти компоненты обладают по существу такими же функциональными возможностями и характеристиками, как описанные в этой заявке для морского вибратора 100b. Регулирование глубины погружения и крена морского вибратора 100с описывается в этом разделе позднее.
На фиг. 2А представлен вид в вертикальном разрезе, показывающий первый пример варианта осуществления развертывания 200а морского вибратора 100а, изображенного на фиг. 1А. Как показано на фиг. 2А, в первом варианте осуществления рассматривается линейная группа (то есть, подгруппа), содержащая, например, три морских вибратора. На практике, количество элементов в группе и количество развертываемых групп определяется требованиями, предъявляемыми при сейсмических исследованиях. Концепция трехэлементной группы, представленная на фиг. 2А, является гипотетической, но полностью иллюстрирует варианты осуществления развертывания, относящиеся к настоящему изобретению.
На фиг. 2А показан вариант осуществления развертывания 200а морских вибраторов 210а, буксируемых ниже поверхности 230а воды и соединенных друг с другом кабелем-шлангом 220а. Кабель-шланг 220а представляет собой гибкую несущую структуру, которая соединена с исследовательским судном (непоказанным), находящемся на расстоянии до 1 км, и обладает функциональными возможностями передавать электрическую энергию, передавать и принимать данные и передавать сжатый газ в соответствии с работой морских вибраторов 210а. Сжатый газ используется для пополнения упомянутого выше бака-хранилища с началом развертывания. Напомним, что газ из бака-хранилища используется для уравновешивания поршня при гидростатических нагрузках, связанных с погружением в воду. Локальный источник сжатого газа является предпочтительным, если учитывать связанные с задержкой проблемы, возникающие при подаче газа непосредственно с исследовательского судна, расположенного на расстоянии до 1 км.
Как рассматривалось ранее, в морских вибраторах 210а использованы автономные гидродинамические управляющие поверхности 130а (показанные на фиг. 1А) для изменения/поддержания глубины погружения и надлежащего положения по крену. Они представляют собой очень небольшие поверхности и являются перспективными для морских сейсмических исследований, которые выполняются в арктических водах, где плавучий лед представляет собой источник опасности.
На фиг. 2В представлен вид в вертикальном разрезе, показывающий второй пример варианта осуществления развертывания 200b морских вибраторов 100b, изображенных на фиг. 1В. Согласно варианту осуществления развертывания 200b на фиг. 2В показаны морские вибраторы 210b, буксируемые ниже поверхности 230b воды и соединенные друг с другом кабелем-шлангом 220b. Кабель-шланг 220b обладает по существу такими же функциональными возможностями, какие были описаны ранее для варианта 200а осуществления. Глубина погружения морских вибраторов 210b регулируется сосредоточением сил, возникающих в результате размещения поверхностного поплавка 240b, углубителя 250b и плавучего конуса 260b. То есть, вес кабеля-шланга 220b, расположенного на интервале между поверхностным поплавком 240b и углубителем 250b, используется для погружения морских вибраторов 210b. Соответственно, положением поверхностного поплавка 240b определяется глубина погружения, и это положение регулируют с помощью кабеля 270b, который соединен с лебедкой исследовательского судна (непоказанного). На поверхностном поплавке 240b используется направляющая система (например, подпружиненные прижимные ролики или эквивалентное средство) 242b для облегчения процесса позиционирования. Углубитель 250b и плавучий конус 260b создают необходимые направленную вниз силу и горизонтальную силу, прикладываемые к буксируемому узлу, так что во время выполнения операций сейсмических исследований морские вибраторы 210b расположены по прямой линии и находятся на одном уровне. Здесь следует отметить, что в варианте 200b осуществления кабелем-шлангом соединены все компоненты, исключая плавучий конус 260b, который соединен с последним элементом в группе с помощью привязного троса 280b.
Следует отметить, что в сочетании с вариантом осуществления 200b возможны альтернативные конфигурации кабелей-шлангов. Например, опционально кабель-шланг 220b может заканчиваться на углубителе 250b, а механический силовой элемент может использоваться в качестве средства для соединения морских вибраторов 210b с углубителем 250b. Электрическая энергия, дуплексные данные и сжатый газ будут легче передаваться по цепи небольших гибких кабелей-шлангов, которые проходят один за другим от углубителя 250b к морским вибраторам 210b. Кроме того, при таком подходе углубитель 250b используется в качестве переднего модуля электроники.
Вариант 200b осуществления хорошо подходит, например, для глубоководных исследований, при которых требуется, чтобы морские вибраторы были развернуты на номинальных глубинах, составляющих 5 м или более.
На фиг. 2С представлен вид в вертикальном разрезе, показывающий третий пример варианта осуществления развертывания 200с морских вибраторов 100с, изображенных на фиг. 1С. Согласно варианту осуществления развертывания 200с на фиг. 2С показаны морские вибраторы 210с, подвешенные на поверхностном поплавке 220с и буксируемые ниже поверхности 230с воды при использовании кабеля-шланга 240с, который соединен с передним концом поверхностного поплавка 220с. Кабель-шланг 240с обладает по существу такими же функциональным возможностями, какие были описаны ранее для варианта 200а осуществления. Глубина погружения морских вибраторов 210с регулируется изменением длины несущих кабелей 242с при использовании ряда лебедок (непоказанных), расположенных на поверхностном поплавке 220с. Кабель-шланг 240с разделен на сеть небольших гибких кабелей-шлангов 244с для облегчения передачи электрической энергии, дуплексных данных и сжатого газа к морским вибраторам 210с. Разделение выполняют при использовании средства (непоказанного), расположенного на поверхностном поплавке 220с.
Вариант 200с осуществления является по своему существу устойчивым, если исходить из положения по крену, и хорошо подходит, например, для исследования на мелководье или на больших глубинах, для которых требуется, чтобы морские вибраторы были развернуты на номинальных глубинах, составляющих 5 м или менее. Из трех вариантов осуществления развертывания, раскрытых в этой заявке, вариант 200с осуществления считается наилучшим для морских сейсмических исследований, выполняемых в переходной зоне.
На фиг. 2D представлен вид в вертикальном разрезе, показывающий четвертый пример варианта осуществления развертывания 200d морских вибраторов 100с, изображенных на фиг. 1С. Согласно варианту осуществления развертывания 200d на фиг. 2D показаны морские вибраторы 210d, подвешенные на поверхностном поплавке 220d и буксируемые ниже поверхности 230d воды при использовании кабеля-шланга 240d, который соединен с самым передним морским вибратором 210d. Кабель-шланг 240d обладает по существу такими же функциональными возможностями, какие были описаны ранее для варианта 200а осуществления. Глубина погружения морских вибраторов 210d регулируется изменением длины несущих кабелей 242d при использовании ряда лебедок (непоказанных), расположенных на поверхностном поплавке 220d. Кабель-шланг 240d также используется как межкомпонентный буксировочный кабель между всеми морскими вибраторами 210d в группе и облегчает передачу электрической энергии, дуплексных данных и сжатого газа к морским вибраторам 210d.
Вариант 200d осуществления является по своему существу устойчивым, если исходить из положения по крену, и хорошо подходит, например, для исследования на мелководье или на больших глубинах, для которых требуется, чтобы морские вибраторы были развернуты на номинальных глубинах, составляющих 5 м или менее. Кроме того, вариант 200d осуществления обладает гибкостью (относительно варианта 200с осуществления) соединения в буксировочной точке с кабелем-шлангом, так что он совместим с требованиями сейсмических исследований и возможностями исследовательского судна по развертыванию и поднятию на борт.
Хотя это и не показано на фиг. 2A-2D, положение линейных групп в каждом из вариантов 200a, 200b, 200c и 200d осуществления может быть определено с помощью комбинации акустического средства (например, системы определения местоположения со сверхмалой базой) и приемопередатчиков глобальной системы определения местоположения, оперативно располагаемых на приповерхностных и поверхностных компонентах, включая, при необходимости, исследовательское судно.
Заключение
В одном или нескольких вариантах осуществления изобретения представлены способы компоновки и развертывания морского вибратора, предназначенного для использования при морских сейсмических исследованиях. Изложенные выше применения и относящиеся к ним варианты осуществления следует рассматривать как только иллюстративные, и многочисленные другие варианты осуществления могут быть разработаны при использовании способов, раскрытых в этой заявке, в самых различных морских сейсмических исследованиях.
Кроме того, должно быть понятно, что конфигурации морских вибраторов, описанные в этой заявке, могут быть реализованы, по меньшей мере частично, в виде одной или нескольких программ пакета программного обеспечения, сохраняемых в запоминающем устройстве и выполняемых процессором или устройством обработки, таким как компьютер. Запоминающее устройство или другое устройство хранения данных, имеющее такой программный код, содержащийся в нем, является примером, который в более общем смысле называется «компьютерным программным продуктом».
Раскрытые конфигурации морских вибраторов могут быть реализованы, по меньшей мере частично, при использовании одной или нескольких платформ обработки. Поэтому один или несколько модулей обработки или других компонентов, устройство хранения данных или другой элемент платформы обработки могут выполнять действия в компьютере. Конкретный такой элемент можно рассматривать как пример того, что обычно называют «устройством обработки».
Поэтому следует понимать, что варианты осуществления, описанные в этой заявке, являются только иллюстрацией принципов этого изобретения и что различные модификации могут быть реализованы специалистами в данной области техники без отступления от объема и сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| СИСТЕМА УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ БУКСИРУЕМЫМ МОРСКИМ ОБЪЕКТОМ | 2020 |
|
RU2806020C2 |
| Автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом | 2016 |
|
RU2640896C1 |
| Способ управления сейсмоакустическими косами и устройство позиционирования для его осуществления | 2015 |
|
RU2607076C1 |
| КОГЕРЕНТНЫЙ ИСТОЧНИК ЗВУКА ДЛЯ МОРСКОЙ СЕЙСМОРАЗВЕДКИ | 2016 |
|
RU2702421C2 |
| Буксируемое устройство | 2018 |
|
RU2688634C1 |
Изобретение относится к области геофизики и может быть использовано при поведении морских сейсморазведочных работ. Предложены способы компоновки и развертывания морского вибратора, предназначенного для использования при морских сейсмических исследованиях. Морские вибраторы образуют в нескольких конфигурациях плавучести с соответствующими техническими средствами для регулирования глубины погружения морских вибраторов. Типичный морской вибратор содержит положительно плавучий гидродинамический буксируемый корпус, содержащий низкочастотный электроакустический прожектор; систему силовой электроники; систему электроники управления-мониторинга и систему компенсации давления, при этом гидродинамический буксируемый корпус содержит одну или несколько активных управляющих поверхностей для регулирования глубины погружения и положения по крену гидродинамического буксируемого корпуса. В дополнительных вариантах осуществления использована свободно заполняющаяся водой несущая рама с положительной или отрицательной плавучестью. Технический результат – повышение информативности получаемых данных. 2 н. и 9 з.п. ф-лы, 2 ил.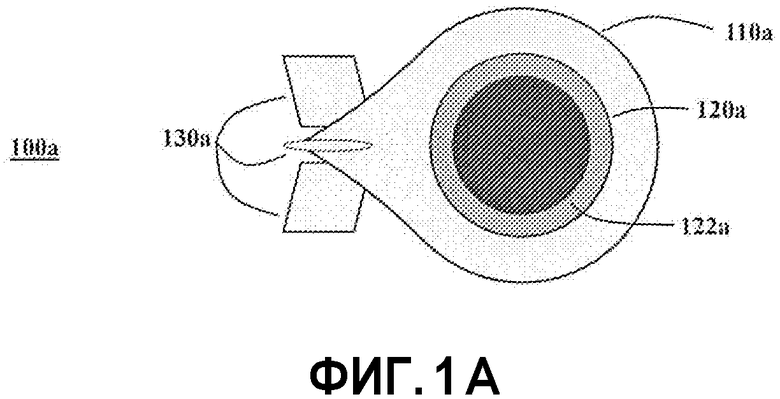
1. Морской вибратор, содержащий:
свободно заполняющуюся водой несущую раму, содержащую:
низкочастотный электроакустический прожектор;
систему силовой электроники;
систему электроники управления-мониторинга; и
систему компенсации давления,
при этом морской вибратор является отрицательно плавучим и при этом глубина погружения морского вибратора регулируется при использовании одной или нескольких лебедок, расположенных на поверхностном поплавке, на котором подвешен морской вибратор, при этом точкой буксировки морского вибратора является один или несколько из переднего конца поверхностного поплавка и из переднего конца свободно заполняющейся водой несущей рамы.
2. Морской вибратор по п. 1, где множество морских вибраторов расположены в линейной группе и подвешены по существу непосредственно ниже поплавка, расположенного на поверхности воды, и буксируются исследовательским судном с помощью несущего гибкого кабеля-шланга, заключающего в себе функциональные возможности передачи одного или нескольких из электрической энергии, данных и сжатого газа к линейной группе и приема данных с линейной группы.
3. Морской вибратор по п. 1, где множество морских вибраторов расположены в линейной группе.
4. Морской вибратор по п. 3, в котором по меньшей мере одна лебедка и узел несущего кабеля используются для регулирования глубины погружения линейной группы; при этом по меньшей мере одна лебедка расположена во внутреннем пространстве поплавка.
5. Морской вибратор по п. 3, где множество линейных групп расположены с образованием планарной или объемной группы, буксируемой ниже поверхности воды исследовательским судном.
6. Морской вибратор по п. 1, в котором свободно заполняющаяся водой несущая рама также содержит источник локальной электрической энергии и газ под высоким давлением.
7. Морской вибратор, содержащий:
свободно заполняющуюся водой несущую раму, включающую внутренние компоненты, содержащие:
низкочастотный электроакустический прожектор;
систему силовой электроники;
систему электроники управления-мониторинга; и
систему компенсации давления,
при этом рама и внутренние компоненты делаются положительно плавучими за счет использования обладающего плавучестью пенопласта, расположенного в раме так, что центр плавучести рамы и внутренних компонентов находится на более высоком уровне, чем центр тяжести рамы и внутренних компонентов.
8. Морской вибратор по п. 7, где множество морских вибраторов расположены в линейной группе и буксируются ниже поверхности воды исследовательским судном с помощью несущего гибкого кабеля-шланга, заключающего в себе функциональные возможности передачи одного или нескольких из электрической энергии, данных и сжатого газа к линейной группе и приема данных с линейной группы.
9. Морской вибратор по п. 8, в котором поверхностный поплавок, кабель-шланг, углубитель и плавучий конус регулируют глубину погружения и прямолинейность линейной группы.
10. Морской вибратор по п. 8, где множество линейных групп расположены с образованием планарной или объемной группы, буксируемой ниже поверхности воды исследовательским судном.
11. Морской вибратор по п. 7, в котором рама также содержит источник локальной электрической энергии и газ под высоким давлением.
| US 20150234072 A1, 20.08.2015 | |||
| US 20110149681 A1, 23.06.2011 | |||
| US 20130051180 A1, 28.02.2013 | |||
| WO 2008008127 A2, 17.01.2008 | |||
| US 20140226439 A1, 14.08.2014 | |||
| Электрический ударный инструмент | 1926 |
|
SU13929A1 |

