Изобретение относится к измерительной технике и способам измерения, может быть использовано в обувной промышленности, в частности в приборах для определения размеров обуви самых разных типов от сапог до босоножек.
Способы и устройство можно применять в обувной, швейной и трикотажной промышленности при измерении, производстве, проектировании, оценке качества обуви (в том числе анатомической/ортопедической), одежды и головных уборов, а также изделий, которые должны точно соответствовать человеческому телу, такие как ортопедические стельки, ортезы, протезы. Можно применять в быту, в торговой индустрии при реализации, продаже и удаленной покупке обуви, предметов одежды, головных уборов, отвечающих реальным особенностям тела заказчика.
Способы и устройство можно применять при измерении и других тонкостенных объектов: труб, сифонов, различных сосудов, каналов любой формы и др. Устройство может измерять следующие параметры: обхваты, длина окружности, овальность, отклонение от формы, геометрию профиля.
Известно устройство для определения внутренней поверхности обуви, принцип работы которого заключается в том, что на щупе, жестко соединенном с камерой, расположен чувствительный элемент, который касается измеряемой поверхности, а камера ориентируется по изменяемой относительно нее картине 2D меток, расположенных снаружи объекта, и строится программно 3D модель [US 20100238271 A1, 23.09.2010].
Недостатками известного устройства являются наличие только одного чувствительного щупа; необходимость вручную проходить всю поверхность; искажение результатов измерений из-за различной величины нажатия щупа; трудоемкость и длительность измерений.
Известен метод для обнаружения трехмерной формы внутренних пространств, таких как обувь, трубы оптическим способом и устройство для выполнения сказанного метода [US 2005/0168756 A1, 04.08.2005].
Данное изобретение относится к способу оптического обнаружения трехмерной формы внутренних пространств и устройств для осуществления способа. Принцип работы прототипа заключается в том, что на внутреннюю стенку пространства крепится облегающий материал с разметкой. Камера помещается внутрь и делает серию перекрывающихся снимков. Снимки обрабатываются фотограмметрическим методом и получается 3D модель внутренней поверхности.
Недостатком этого подхода является необходимость крепить разметочный материал по всей измеряемой поверхности, что является затруднительным, т.к. необходимо предусмотреть сцепляющие средства и их последующее удаление. Кроме того, измеряемый объект может искажать свою истинную форму, если материал нетвердый.
Технический результат способа измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов - повышение точности, снижение трудоемкости и времени измерения.
Технический результат достигается использованием способа измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов, в ходе которого при перемещении устройства внутри измеряемого объекта камера по индикаторам, находящимся на щупах, создающих равномерное напряженное состояние на измеряемой поверхности, получает относительно плоской маркировочной полосы пространственные данные, с помощью которых строится трехмерная модель внутреннего пространства объекта, размеры которого получаются в результате измерения восстановленной трехмерной модели, а упругие свойства получаются в результате сканирования одного и того же объекта с разным усилием и измерения модуля разности конечного и изначального размеров деформированного тела.
Способ предполагает сочетание контактного и бесконтактного способа измерения 3D объектов. Устройство позволяет получать трехмерную цифровую модель объекта путем сбора данных о его форме и размерах. Изображение с камеры используется для извлечения 3D данных (собирая информацию о размерах и форме поверхности в пределах его поля зрения). В результате получается геометрическое облако точек поверхности объекта.
Повышение точности достигается в том числе тем, что одновременно восстанавливается сечение эластичного трубчатого объекта под действием механических расширяющих нагрузок, оказываемых щупами устройства.
Для придания эластичному объекту естественной формы производится равномерное расширение поверхности в пределах измеряемого сечения системой упругих щупов.
Для беспрепятственного начального помещения устройства в измеряемый объект используется механизм сведения и разведения щупов.
Щупы, находясь в напряженном состоянии, плотно прилегают к измеряемой поверхности, что в случае эластичности измеряемого материала будет восстанавливать изначальную форму, а значит, это повысит точность измерений.
В отличие от прототипа, мы предлагаем использовать разметочный материал только с одной стороны. Формирование 3D модели внутренней поверхности в нашем случае происходит не за счет снимков измеряемого объекта, а за счет снимков положений индикаторов на щупах относительно плоской маркировочной полосы. Кроме того, щупы находятся внутри измеряемого пространства в напряженном состоянии и равномерно растягивают материал объекта, что позволяет измерить его изначальную, не деформированную форму.
Результаты измерения выдаются в виде облака точек, которое формирует CAD файл (obj).
Механизм устройства оснащен измерительными щупами. Считывание трехмерных координат по осям происходит пока они перемещаются вдоль внутренней поверхности объекта. Устройство оснащено видео или фотокамерой, которая позволяет получить информацию о точном положении кончика сканирующего щупа в режиме реального времени в трех плоскостях.
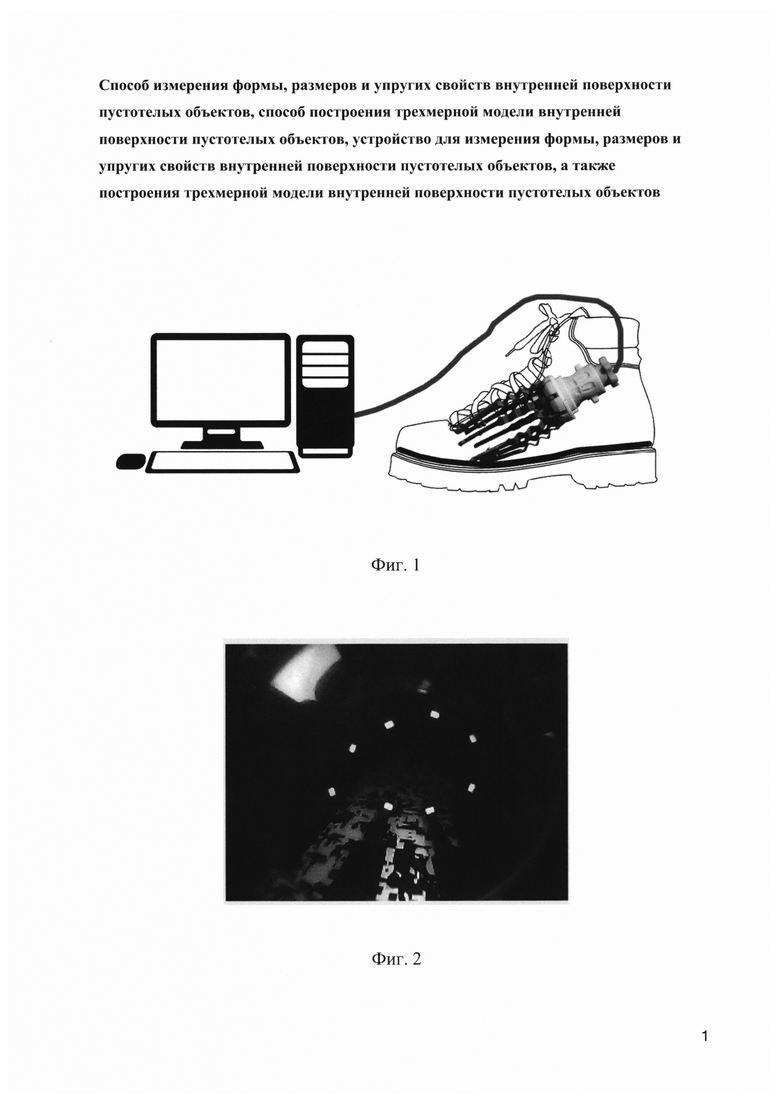
На фигуре 1 показано устройство в положении определения формы и размеров обуви.
Технический результат способа построения трехмерной модели внутренней поверхности пустотелых объектов - повышение точности, снижение трудоемкости и времени измерения.
Достигается использованием способа, в ходе которого при перемещении устройства внутри измеряемого объекта камера по индикаторам, находящимся на щупах, создающих равномерное напряженное состояние на измеряемой поверхности, получает относительно плоской маркировочной полосы пространственные данные, с помощью которых строится трехмерная модель внутреннего пространства объекта, размеры которого получаются в результате измерения восстановленной трехмерной модели, а упругие свойства получаются в результате сканирования одного и того же объекта с разным усилием и измерения модуля разности конечного и изначального размеров деформированного тела.
По мере перемещения устройства внутри измеряемого объекта записываются изображения с камеры. В процессе дальнейшей обработки по каждому изображению определяется положение индикаторов щупов и фрагментов изображения плоской маркировочной полосы.
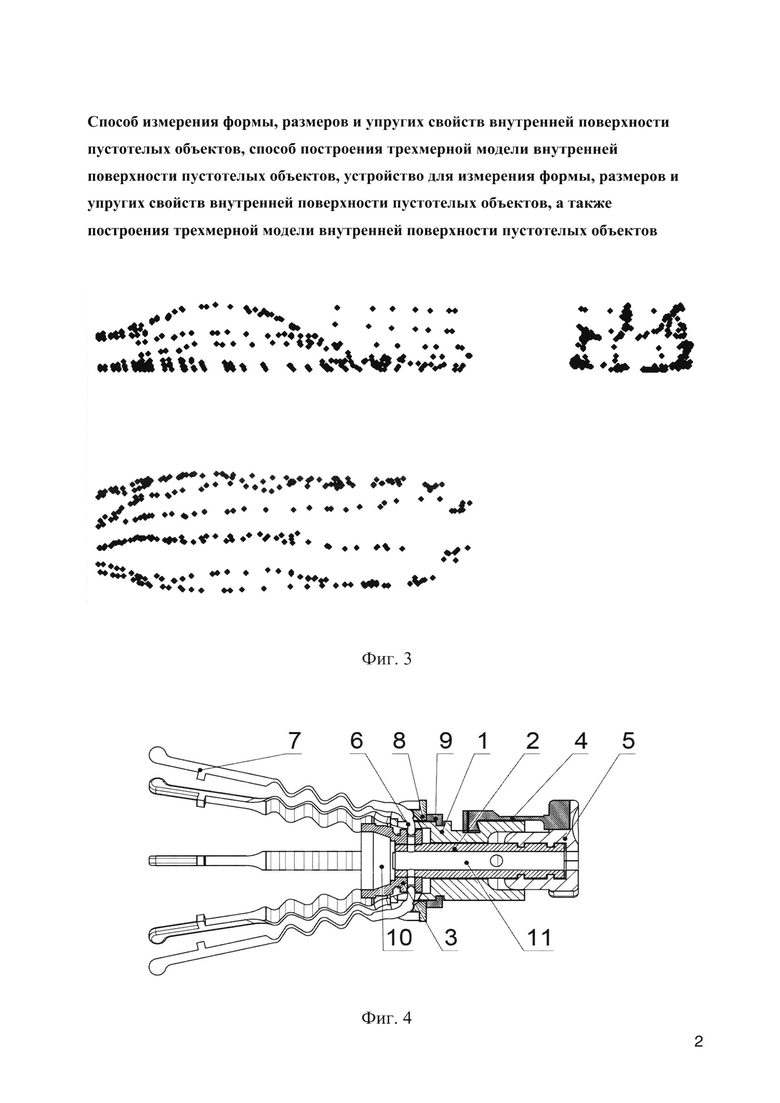
На фигуре 2 показано изображение с камеры, на которой отчетливо видна плоская маркировочная полоса и индикаторы, что позволяет по полученной информации обработать изображения с помощью программного обеспечения (ПО) и получить координаты точек измеряемого объекта.
Поиск на изображении индикаторов щупов производится по зеленому цветовому каналу G формата изображения RGB (red, green, blue). Поиск производится в два этапа. Сначала путем полного сканирования запоминаются пиксели зеленого цвета. Затем среди них методом Монте-Карло ищутся области круглой формы (радиусом 5 пикселей при размере изображения 640×480 пикселей), содержащие максимальное количество зеленых пикселей. После нахождения первого индикатора принадлежащие ему зеленые пиксели удаляются с основного изображения и производится поиск следующего индикатора. После того как окажется невозможным найти очередную круговую область, заполненную зелеными пикселями, делается вывод о количестве индикаторов в поле зрения.
Остановка видеозаписи производится, когда количество индикаторов в поле зрения существенно уменьшится (в частности, с 8 до 3), что означает распрямление щупов при выходе устройства из измеряемой полости.
На каждом изображении индикаторы щупов позволяют получить информацию о сечении внутренней поверхности. Последовательность изображений позволяет получить множество сечений внутренней поверхности - облако точек. Для совмещения сечений между собой используется плоская маркировочная полоса, позволяющая с высокой точностью установить расположение каждого измеренного сечения в пространстве.
Так как индикаторы удалены от концов щупов, производится предварительная калибровка, позволяющая соотнести расстояние индикатора в пикселях от оптического центра изображения с реальным углом между осью камеры и точкой касания щупа о внутреннюю поверхность.
Изображение на полосе-маркере представляет собой случайную комбинацию прямоугольников и эллипсов черного и белого цвета. Распределение фигур по размерам подобрано таким образом, чтобы малые фрагменты изображения были уникальными и не повторялись на той же полосе-маркере. Условие уникальности должно выполняться в широком диапазоне характерных расстояний: для фрагментов различных размеров (в частности, квадратных фрагментов от 2×2 мм2 до 20×20 мм2).
Так как щупы имеют определенную ширину, они закрывают значительную часть изображения плоской маркировочной полосы. Поэтому для определения позиции устройства используются фрагменты изображения маркировочной полосы, заключенные между щупами (в частности, при измерении передней части обуви) или между концами щупов (в частности, при измерении задней части обуви).
Для поиска фрагментов изображения полосы-маркера используется метод Монте-Карло с сужающимися диапазонами, который позволяет определить координаты xф, yф фрагмента в системе координат полосы-маркера, размер фрагмента квадратной формы аф и связать эти параметры с параметрами фрагмента на изображении, поступающем с камеры: координатам x y, и параметрам трапеции, представляющей искаженный квадратный фрагмент при виде под углом (разность между верхним и нижним ребром, горизонтальное смещение верхнего ребра относительно нижнего, угол поворота трапеции в целом). В качестве критерия совмещения фрагментов изображений используется сумма квадратов разностей интенсивности соответствующих пикселей.
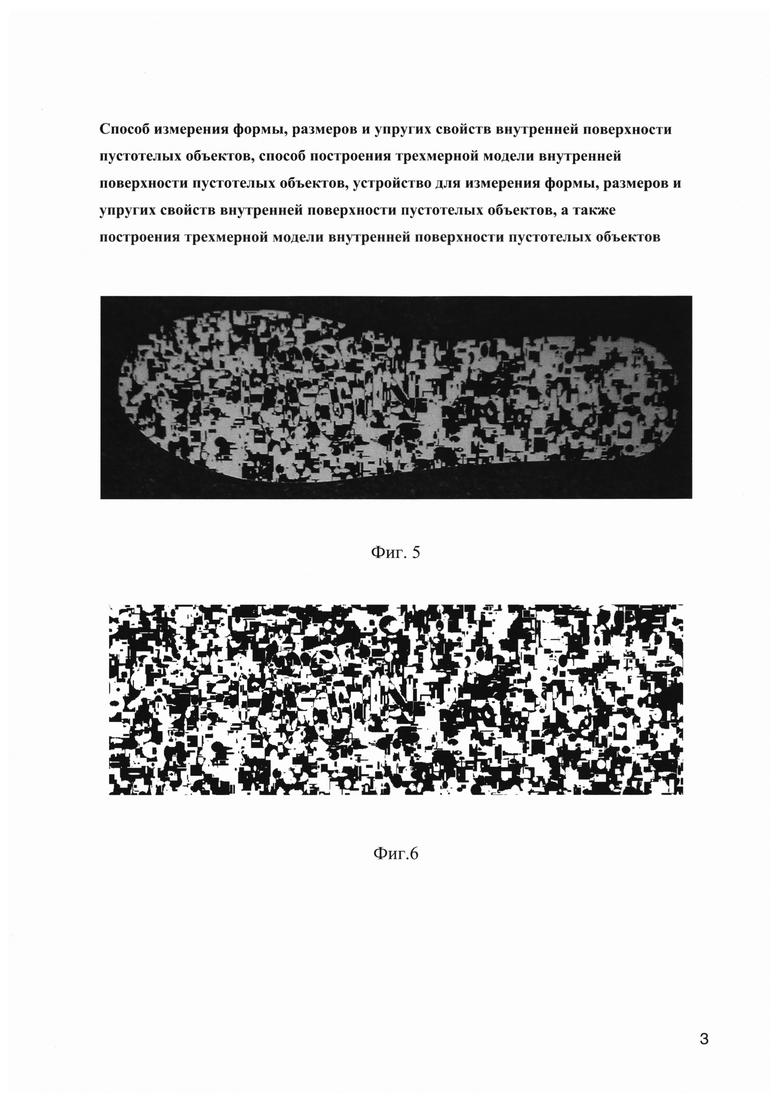
По каждому кадру производится поиск трех фрагментов квадратной формы изображения полосы-маркера: основной, а также с отступами вверх и вправо относительно основного фрагмента. По координатам xф, yф трех фрагментов на плоской маркировочной полосе рассчитываются три координаты оптического центра камеры xэ, yэ, zэ и углы ориентации оптической оси камеры αэ, βэ, γэ. Последние 6 параметров позволяют однозначно и с высокой точностью определить положение концов щупов в пространстве и добавить точки, полученные для данного кадра, в общее облако точек, соответствующее форме внутренней поверхности измеряемого объекта (фиг. 3).
Технический результат использования устройства для измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов, а также построения трехмерной модели внутренней поверхности пустотелых объектов - повышение точности, снижение трудоемкости и времени измерения.
Технический результат достигается использованием устройства, состоящего из корпуса, установленной в нем камеры, двух и более щупов с индикаторами, а также плоской маркировочной полосы.
На фигуре 4 показан корпус 1, ось 2, блок линз 3, ключ 4, рукоять 5, щуп 6 с индикатором 7, стопорные 8 и фиксирующие 9 полукольца, линза 10, камера 11, подключенная к ЭВМ. В устройстве имеется механизм, позволяющий фиксировать угол раскрытия упругих щупов, с целью восстановления формы измеряемых эластичных поверхностей.
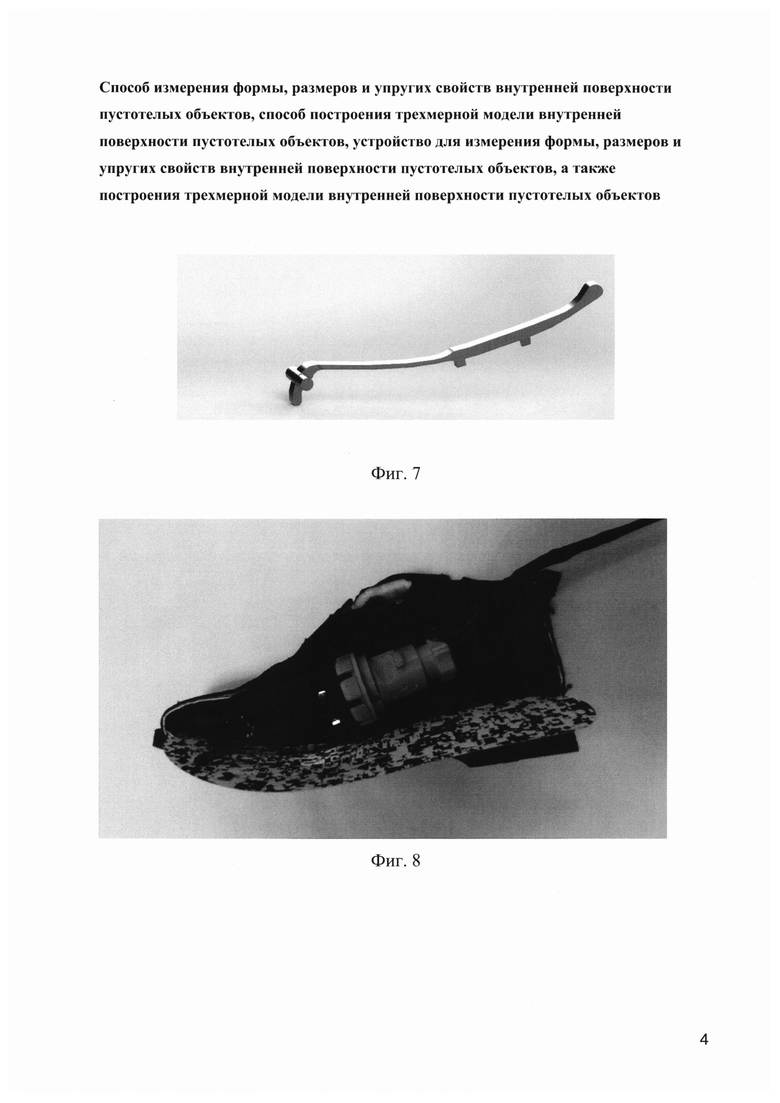
Плоская маркировочная полоса в виде стельки для измерения обуви, предназначенная для позиционирования изображения, полученной с камеры, в пространстве изображена на фигуре 5. Изображение для плоской маркировочной полосы, сгенерированное как случайная комбинация черных и белых прямоугольников и эллипсов различных размеров, на фигуре 6.
Щуп, изображенный на фигуре 7, имеет сложную форму, включающую в себя хвостовик, которому передается движение рукояти оси, находящейся в ложах корпуса, относительно которых он вращается, стрелу выпуклой формы в сторону оси, начало которой является гибким, с целью создания прижимного усилия при раздвижении щупов, а на конце имеется округление для предотвращения задира материала и лучшего касания, на твердой части стрелы расположены один или несколько выступов для индикаторов, положение которых в трехмерном пространстве отслеживает встроенная внутрь механизма камера.
Программное обеспечение позволяет преобразовать облако снятых точек в трехмерную модель измеренной внутренней поверхности.
Устройство работает следующим образом. Движением рукояти 5 в сторону, противоположную линзе 10, хвостовики щупов 6, двигаясь в пазах блока линз 3, уменьшают угол раскрытия щупов до их касания друг с другом. Ключ 4 при этом за счет упругих свойств находится в напряженном состоянии на поверхности корпуса 1. В сведенном положении щупов 6 устройство помещается внутрь измеряемого объекта. Движением рукояти 5 в сторону линзы 10 щупы 6 раскрываются до требуемого усилия, определяемого пазом в корпусе 1, в который защелкивается ключ 4, препятствуя своду щупов, при снятии усилия с рукояти. Камера 11 включается на запись и передает положение индикаторов 7 относительно полосы-маркера на ЭВМ. За рукоять 5 устройство вынимается из измеряемого объекта, при этом щупы 6 за счет созданного на них напряжения будут плотно прилегать к измеряемой поверхности. После снятия измерений камера выключается. ЭВМ преобразует полученную информацию в 3D модель измеренной внутренней поверхности.
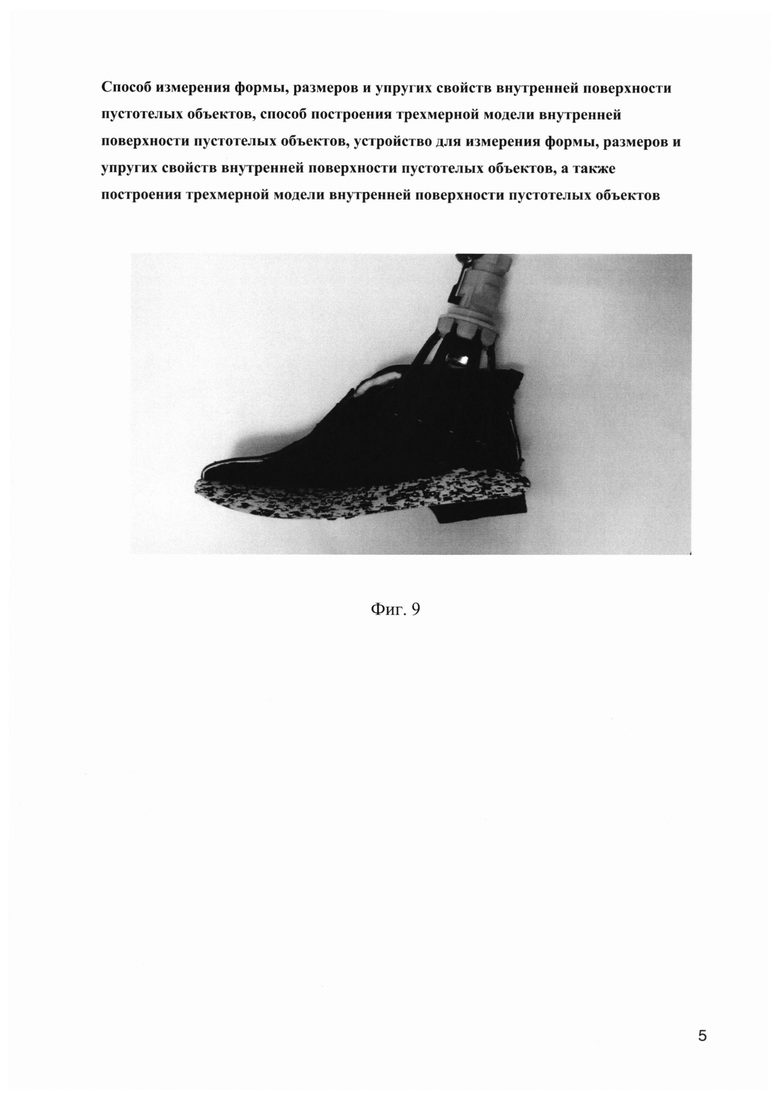
На фигурах 8, 9, 10 показано положение устройства при движении по внутренней поверхности измеряемого объекта (обуви).
На фигуре 8 показано измерение устройством носка обуви. На фигуре 9 показано измерение устройством задней части обуви. Чтобы показать положение устройства внутри обуви, был сделан продольный разрез обуви.
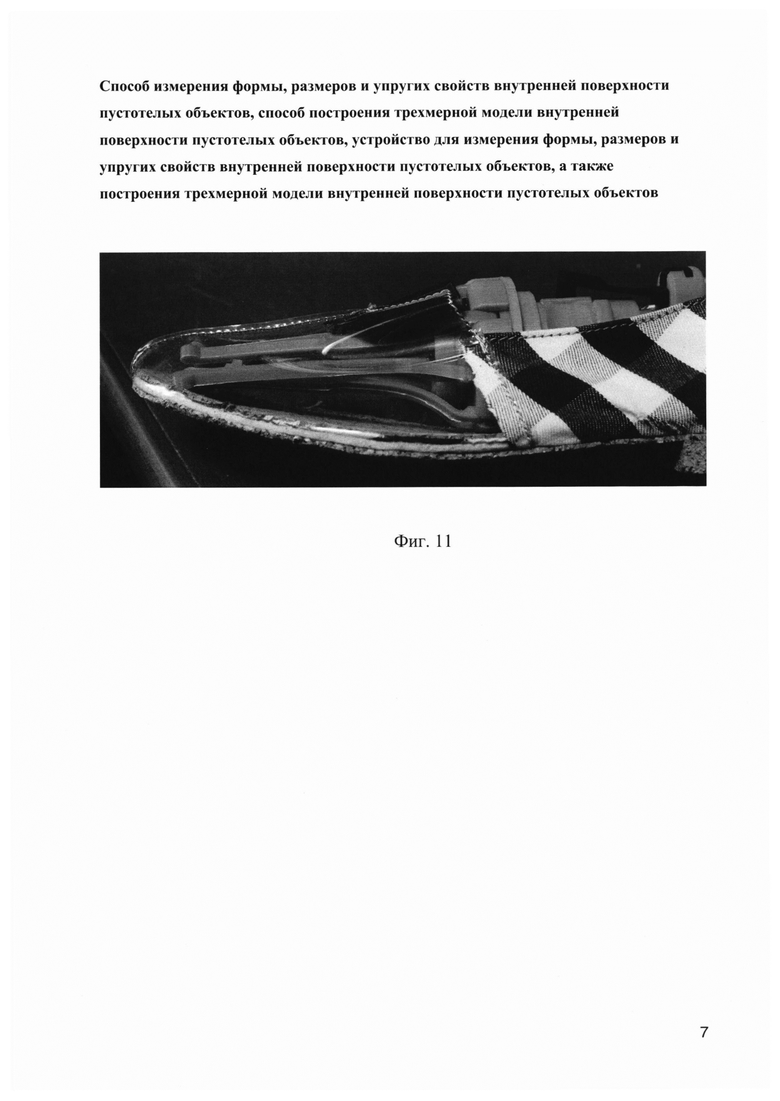
На фигуре 10 показано измерение устройством средней части обуви на поперечном разрезе обуви. На фигуре 11 показано положение щупов устройства при измерении носочной части в обуви с прозрачным верхом. На фигуре видно, что во всех положениях щупы с индикаторами плотно прилегают к внутренней поверхности обуви.
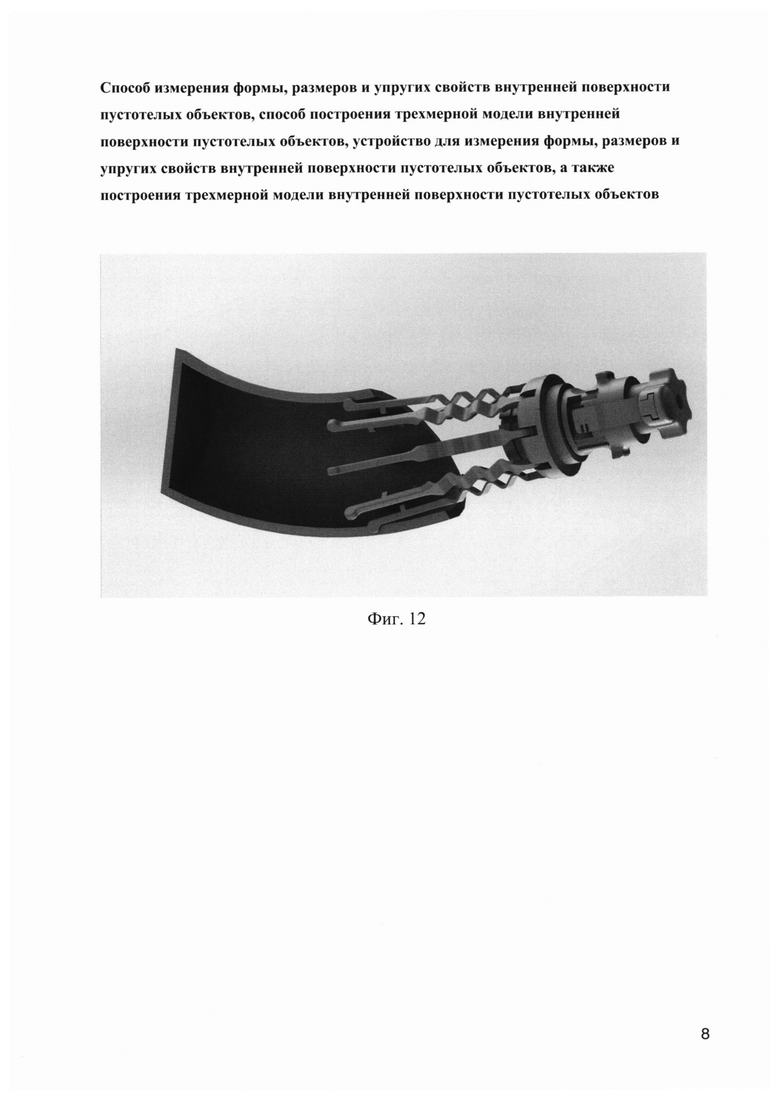
На фигуре 12 и 13 показано, что область применения не ограничивается обувью и устройство может измерять внутренние поверхности как одежды (рукава), так и технических объектов - трубы.
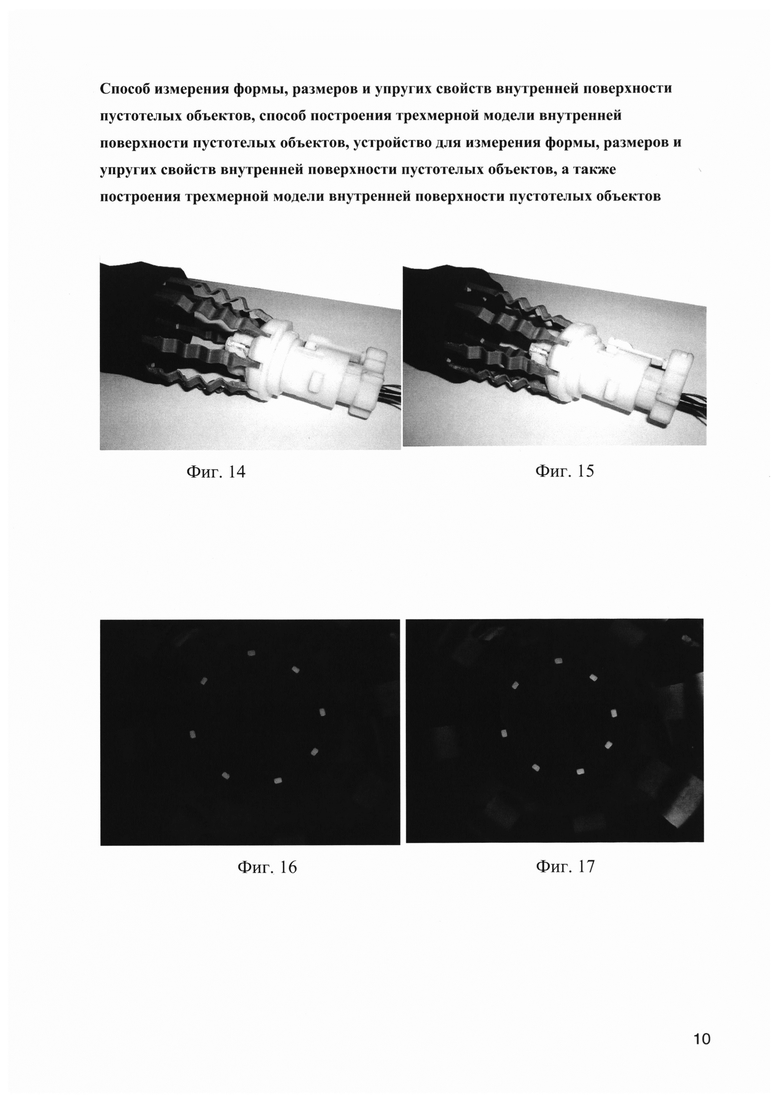
Устройство имеет возможность фиксации щупов в нескольких положениях, минимум в трех: ветви закрыты, раскрыты на половину, раскрыты полностью (угол 100°). Это позволяет раскрывать щупы с требуемым усилием. Если измерить один и тот же объект из эластичного материала с разным усилием, можно с легкостью определить его упругие свойства, в частности величину абсолютной деформации, равной модулю разности конечного и изначального размера деформированного тела. Таким образом с помощью устройства становится возможным измерять упругие свойства при растяжении различных видов кожи, ткани и других материалов.
На фигурах 14 и 15 показано измерение эластичности манжеты рукава. На фигуре 14 при сильном напряжении, на фигуре 15, при слабом напряжении.
На фигурах 16 и 17 показано изображение с камеры при измерении эластичности манжеты рукава. На фигуре 16 и 17 видно, что сечение, составленное из точек индикаторов, на фигуре А больше, чем на фигуре Б.
Устройство также позволяет контролировать качество поверхности и обнаруживать дефекты, которые видны только при растягивании эластичного материала. На фигуре 18 показано изображение с камеры, на которой виден шов рубашки. При перемещении устройства в рукаве ткань растягивается, растягивается и шов, при этом все дефекты можно контролировать через камеру.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения формы и размеров частей тела человека, способ поиска на изображении плоского объекта известной формы и размеров, способ отделения на изображении части тела человека от фона | 2018 |
|
RU2684436C1 |
| Система для построения модели трехмерного пространства | 2023 |
|
RU2812950C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2474787C1 |
| Способ получения информации о форме и размерах трехмерного объекта по его двухмерному изображению | 2022 |
|
RU2816504C1 |
| Контактное устройство для измерения конфигурации и размеров объемного тела, система измерения конфигурации и размеров объемного тела, способ измерения конфигурации и размеров объемного тела | 2017 |
|
RU2663387C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433372C2 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО ПОСТРОЕНИЯ ТРЕХМЕРНЫХ МОДЕЛЕЙ ГОРОДОВ | 2017 |
|
RU2638638C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНОЙ ГЕОМЕТРИИ ВЫПУКЛЫХ И ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2708940C1 |
| Способ и устройство для измерения трёхмерных координат поверхности объекта | 2023 |
|
RU2812008C1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |



Предложенная группа изобретений относится к измерительной технике и способам измерения формы, размеров и упругих свойств, а также построения трехмерной модели внутренней поверхности пустотелых объектов, в частности обуви. Указанные способы предполагают перемещение устройства внутри измеряемого объекта по индикаторам, находящимся на щупах, создающих равномерное напряженное состояние на измеряемой поверхности, получение относительно плоской маркировочной полосы пространственных данных, с помощью которых строится трехмерная модель внутреннего пространства объекта, размеры которого получаются в результате измерения восстановленной трехмерной модели. При этом упругие свойства получаются в результате сканирования одного и того же объекта с разным усилием и измерения модуля разности конечного и изначального размеров деформированного тела. Устройство для измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов, а также построения трехмерной модели внутренней поверхности пустотелых объектов состоит из корпуса, установленной в нем камеры, двух и более щупов с индикаторами, а также плоской маркировочной полосы. Технический результат, достигаемый от использования способов и устройства, - повышение точности, снижение трудоемкости и времени измерения. 3 н.п. ф-лы, 18 ил.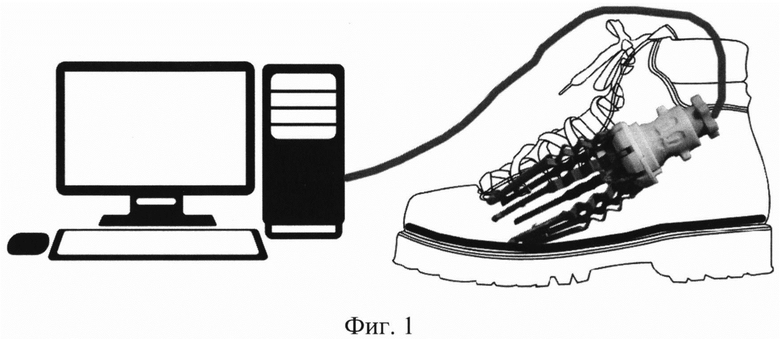
1. Способ измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов, в ходе которого при перемещении устройства внутри измеряемого объекта камера по индикаторам, находящимся на щупах, создающих равномерное напряженное состояние на измеряемой поверхности, получает относительно плоской маркировочной полосы пространственные данные, с помощью которых строится трехмерная модель внутреннего пространства объекта, размеры которого получаются в результате измерения восстановленной трехмерной модели, а упругие свойства получаются в результате сканирования одного и того же объекта с разным усилием и измерения модуля разности конечного и изначального размеров деформированного тела.
2. Способ построения трехмерной модели внутренней поверхности пустотелых объектов, заключающийся в том, что распознают на кадрах видеоизображения положение индикаторов щупов, рассчитывают через математический алгоритм положение точек и совокупностей точек контактов щупов с поверхностью и получают набор текущих сечений внутренней поверхности в виде набора точек; распознают на кадрах видеоизображения элементы плоской маркировочной полосы, определяют текущие координаты и угловую ориентацию устройства относительно плоской маркировочной полосы и привязывают текущее сечение поверхности к общей системе координат; совмещают сечения, полученные для серии кадров, и получают трехмерную модель внутренней поверхности в виде облака точек.
3. Устройство для измерения формы, размеров и упругих свойств внутренней поверхности пустотелых объектов, а также построения трехмерной модели внутренней поверхности пустотелых объектов, состоящее из корпуса, установленной в нем камеры, двух и более щупов с индикаторами, а также плоской маркировочной полосы.
| US 7446884 B2, 04.11.2008 | |||
| RU 94006846 A1, 10.12.1995 | |||
| US 5457325 A1, 10.10.1995 | |||
| Способ измерения рисунка,нанесенного на криволинейную поверхность обувной колодки | 1985 |
|
SU1329760A1 |
| Прибор для измерения валеной обуви | 1933 |
|
SU35002A1 |
| KR 20040078939 A, 14.09.2004. | |||

