Изобретение относится к .легжой промышленности, а именно к области измерения обувных колодок и моделей для целей автоматизированного проектирования обуви с помощью ЭВМ.
Цель изобретения - упрощение и повышение точности измерения за счет разделения точек определения наличия рисунка и измерения поверхности.
На фиг. 1 изображена схема устройства, реализуюнк го предлагаемый способ; на фиг. 2 - пример использования способа в конструкции универсальной координатно-из- мерительной ма1пины с цифровым отсчетом координат.
Устройство, реализук) предлагаемый способ включает узе.ч 1 базирования и закрепления колодки 2 с возможностью продольного перемещения в направляющих 3. Привод 4 для придания врашате;|ьного движения колодке 2 и датчик 5 углового перемещения закреплены на узле 1. Узел 6 для измерения величины )адиус-вектора заостренным 7 соединен с преобразователем 8 перемещения код, на выходе KOTOpoi o получается значение величины радиус-вектора в цифровом виде. Датчик 5 соединен с преобразователем 9 перемещение код, на выходе которог о получается значение величины углового положения колодки в цифровом виде. Блоки 8 и 9 соединены с блоком 10 регистрации, который производит опрос и запись измеряе.мых координат. Блок 11 управления приводом соединен с приводом 4. Индикатор 12 наличия рисунка закреплен таким образом, что его оптическая ось проходит нормально к оси вращения колодки 2, причем ось измерения радиус-вектора 7 пересекается с оптической осью индикатора 12 в точке, лежащей на оси вращения ко. юдки и под углом ct. Индикатор 12 имеет онто : лектронный фотодатчик 13, который соединен с усилителем 14, снабженным схемой автоматической регулировки усиления. Уси,литель 14 соединен с компаратором 15, который соединен с управляющим входом запоминающего регистра 16, а информационньп( вход ре1 истра 16 соединен с блоком 9. Выход блока 16 соединен с блоком 17 сложения, который соединен со схемой 18 сравнения и с блоком 11 управления приводом. Схема 17 сложения производит вычисление суммы входного сигнала с величиной а. Схема 18 сравнения соединена с уиравляю1цим входо.м блока 10 регистрации и с выходом блока 9. Устройство снабжено источниками 19 света д. равномерного освещения те.та колодки рас- сеяным светом со сторощ 1 индикатора 12. На поверхности колодки 2 нанесена линия рисунка, которая пересекает оптическую ось индикатора 12 в точке А.
Устройство работает следующим образом.
Колодка 2 приводится во врапхательное
движение с помощью привода 4, на выходе
блока 9 присутствует текущее значение угло- Boi o положения колодки. При пересечении линии рисунка оптической осью индикатора 12 (в точке Р) происходит затемнение
фотодатчика 13, что приводит к перепаду уровня си1 нала датчика 13. Этот сигнал усиливается усилителем 14 и подается на компаратор 15, который срабатывает при превышении некоторого порогового значения. срабатывания устанав.чивается в зави- си.мости от чувствительности фотодатчика и уровня освещенности колодки. Автоматическая регулировка усиле1П1я усилителя 14 необходима для компенсации изменения обпхего уровня освещенности, обуслов.ченного криволинейной поверхностью. Сигнал компаратора 15 поступает на управляющий вход «Запись запоминаюпк го регистра 16. При этом происходит запись в регистр 16 значения выходного сигнала с блока 9, соответствующего угловому положецию колодки в
момент индикации рисунка в точке Р. Запи- caHH(je в регистре 16 число подается на схему сложения, где вычисляется сумма входного числа и числа, соответствующего углу поворота ос. Эта величина , 1яется по ......-а,.
0
0
| де (индекс, cooi иетствуюпгий уг.човои
координате;
.4,р угловое по. южение колодки в момент обнаружения (индикации) наличия рисуика;
а, - величина смещения не.) у1 ,товой координате, причем 0.. (ct - угол между оптической осью индикатора 5и направлением измерения радиусвектора )
и подается в качестве установочного числа в режиме позиционирования на блок 1 1 управления приводом. В режи.ме позиционирования привод 4 приводит колодку в угловое положение, равное установочному числу (т. е. отличающееся от положения иидика- ции на угол а). Схе.ма 18 совпадения выдает сигнал при совпадении А с выхода 17 и показаний углового положения колодки с вы- 5 .хода 9. По сигналу схемы 18 регистратор 10 производит запись координат точки Р. Обходя колодку по поперечным сечениям, можно зафиксировать координаты точек, принадлежащих рисунку в плоскости измерения сечений.
0 Это же устройство позволяет совместить измерение поверхности и изменение рисунка одновременно. В этом случае происходит обмер колодки с некоторым шаго.м подачи привода 4 и с периодической регистрацией координат иа блоке 10. Сигнал блоков 15-17 5 используется для позиционирования между ближайшими точками измерения по тагу, а сигна;| схе.мы 18 сопровождает регистрацию координат точки рисунка специальными метнами в коде, которые позволнют от/шчать точки рисунка от точек иоверхиоети.
В случае применения ЭВМ для обработки данных и:и1ерения третью координату (радиус-векюр) точек рисунка можно определять путем интериоляции. При этом не используются блоки It), 17, 18, а выход б.юка 15 подается на управляющий вход блока 10 (фиг. 1 иункгир).
Уст 5ойство |)а6()тает с:1едую1иим образом.
Колодка 2 приводится во вращате.тыюе движение, а регистратор 10 производит запись текущих координат радиус-вектора (блок 8) и угла поворота (блок 9) с некоторым шагом. При прохождении через оптическую ось линии рисунка сигнал с блока 15 вызывает регистрапию углового положения с выхода блока 9 независимо от состояния блока 8. Эта решстрапия гфоизводит- ся на блоке 10 с соответствук)Н1ей меткой. Если точка, принадлежащая рисунку, не совпадает с измеренными точками, ее находят из уравнения
/,, F(((,i,
где /,, значение радиус-вектора is ючке, принадлежащей рисунку;
F функпия, интерполирукмпая данные на участке в окрестности точки, нринадлежан1ей рисунку;
(,, - уг. ювое иоложение колодки в мо- менть индикации точки Р, н|1И11ад- лежащей рисунку.
Устройство по фИ1 . 1 можно ИСПО. 1ЬЗОвать также и с другими измерительными приборами, например, с обкатываюигим роликом, при этом узел Г) заменяют на туп 20 с роликом.
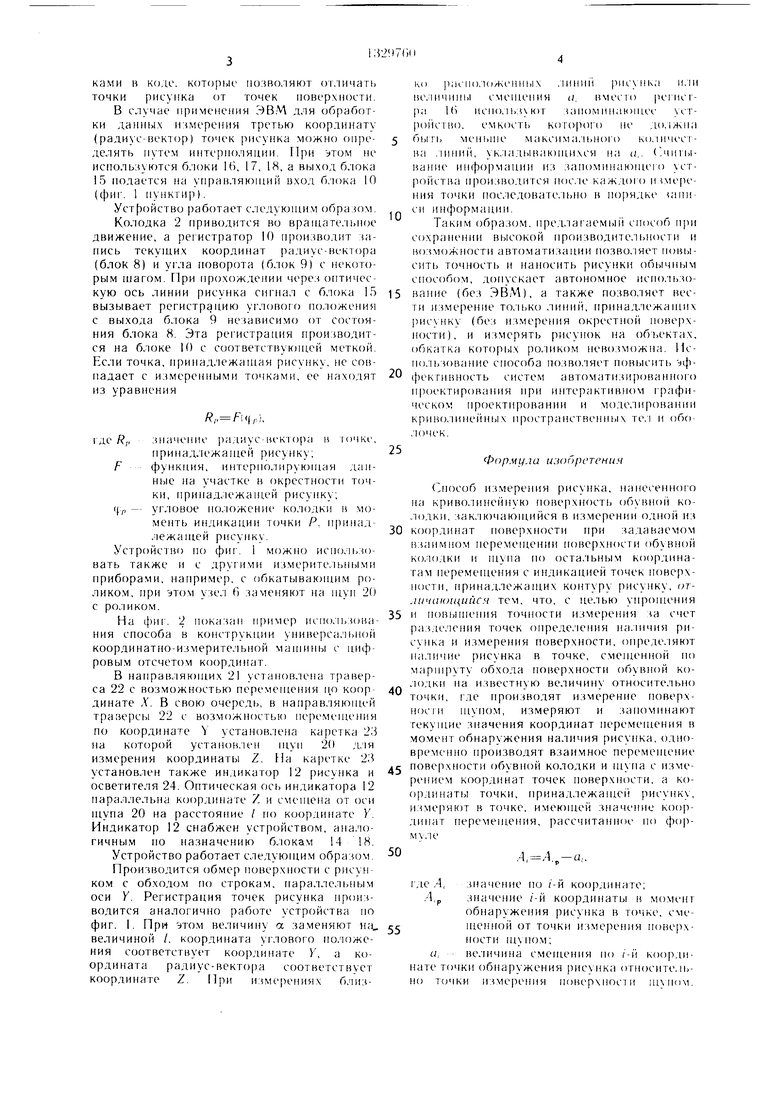
На показан пример испо.чьзоиа- ния способа в конструкции универсально координатно-измерительной мапшны с пиф- ровым отсчетом координат.
В направляк)Н1их 21 установлена траверса 22 с возможностью перемещения 1Ю координате X. В свою очередь, в направляющей траверсы 22 с воз.можностыо 11еремен1ения по координате У установлена каретка 23 па которой установлен тун 20 для измерения координаты Z. Па каретке 2.3 установлен также индикатор 12 рисунка и осветителя 24. Оптическая ось индикатора 12 параллельна координате Z и смешена от осп щупа 20 на расстояние / по координате У. Индикатор 12 снабжен устройством, аналогичным по назначению блокам 14 18.
Устройство работает следующим образом.
Производится обмер поверхности с рисунком с обход(;м по строкам, параллельным оси К. Регистрация точек рисунка производится аналогично работе устройства по фиг. I. При этом величину а заменяют n;t. величиной /. координата углового положения соответствует координате У, а координата радиус-вектора соответствует координате Z. При измерениях близко расположенных .1инпи рисунка и.1и iRMimnniii смешения а, вместо регисг- |ia l(i испо. запоминаюпич ст- юйстио. емкость кого|1ого не до.1жпа
бьггь мет.Hie максима. п.ного ксмичесг- на .iHiniii, укладывающихся на и,. С.чигы- вание информации из запоминающего устройства производится noc.ie каждого шмере- ния точки последовательио в порядке (аписи ин())ормации.
Таким образом. нредла1 аемый способ прн сохраненни высокой производительности и возможности автоматизации позволяет noBiii- сить точность и наносить рисунки обычным способом, допускает автономное исгюльзо5 ванне (без ЭВМ), а также позволяет вести измерение то. ижо линий, нрипадлежаип1х рисунку (без измерения окрестной noBejix- ности), и измерять рисунок на об1 ектах, обкатка которых ро.пиком невозможна. 11с- пользова П1е способа позволяет повысить эф0 фекгпвпость систем автоматизированного нроектирования нрн интерактивном г рафи- ческом проектировании и моделировании криио.1инейных пространственньгх те.1 н оболочек.
25
Формула изоорстения
(люсоб измерения рисунка, панесенно1-о на криволинейную поверхност) обувной ко- лодкп. зак.чючающийся в измерении одной из
0 координат поверхиости при задаваемом в.заимном перемещении новерхности обувной К0.10ДКН и Hiyna по оста.чьным координатам неремешения с индикацией точек поверхности, иринадлежаших контуру рисунку, 07- .11/чающийся тем, что, с целью уп| )ошения
5 и повьпнепия точности измерения за счет разде. 1е1шя точек опреде.чения па. шчия ри- супка и измерения поверхности, определяют наличие рисунка в точке, смеп1ениой по маршруту обхода поверхностн обувной ко.тодки на известную величину относительно
0
точки, где производят измерение поверхности шупом, измеряют и запоминают текущие значения координат перемещения в момент обнаружения наличия рисунка, одновременно производят взаимное перемещение
5 поверхпостп обувной колодки и нппа с измерением коордииат точек поверхности, а координаты точки, принадлежап1е11 рисунку, измеряют в точке, имеюн1ей значение координат нереме| 1ения, рассчитанное но фо|)-
50
А,А-а:.
где .4, .4,
значение но г-и координате: ,р значение /-и координаты в моменг обнаружения рисунка в точке, сме- 5Н1енной от точки измерения пове 1хиости ш 11ом;
а, ве.тичина смеигения по /-и Koojxin- нате точкн обнаружения рисунка относнте. 1Ь- но т(}чки измерения новерхносуи щупом.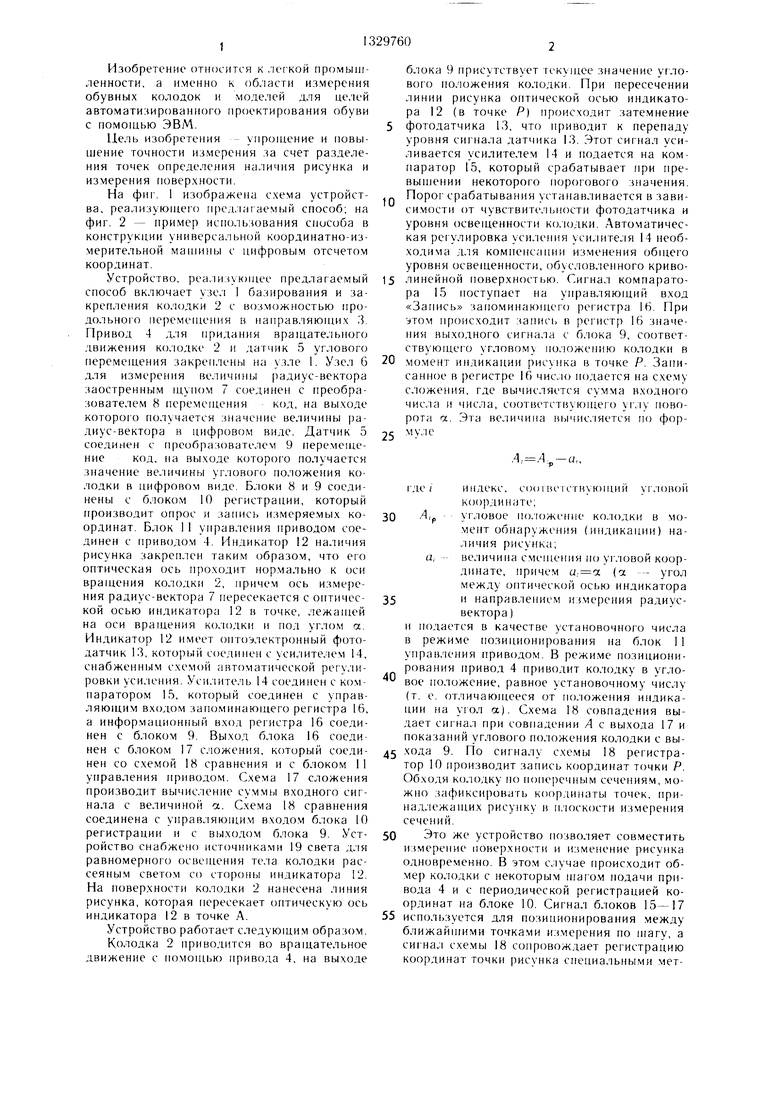
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для измерения обувных колодок | 1983 |
|
SU1136790A1 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| Прибор для контроля формы обувных колодок | 1979 |
|
SU843934A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| СПОСОБ ИНДИКАЦИИ ТЕКУЩЕЙ И ПРОГНОСТИЧЕСКОЙ ИНФОРМАЦИИ В ПРОЦЕССЕ ВОЗДУШНОЙ ДОЗАПРАВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2676594C2 |
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
Изобретение относится к обувной нро- мьнилеиности и предна;}начено для и.чмере- ния и кодирования координат поверхности обувных колодок и рисунка на ней при автоматизированном проектировании обуви с но- мощью ЭВЛ. Целью изобретения является упрон1ение н повьинение точности и пов1 1шение удобства при автоматическом измерении рисунка, нанесенного на колодке. lU .ib достигается за счет разделения точек онреде- .ления наличия рисунка н измерения новсрх- ности. нричем для индикации наличия рисунка используют бесконтактный способ, а д,1я измере1П1я координат контактный. Способ предусматривает определение наличия рисунка с последуюпи1м измерением координат поверхности в той же точке, где бы,т обнаружен рисунок. Это возможно б,чагодаря тому, что точки оп)еделения смеп1ены относительно друг друга по маршруту обхода поверхности на известное и неизменное ра(.-- стояние. Способ допускает измерение поверхности с изме)епием рисунка, изме 1епие т(),1ь- ко рисунка, определение координат рисунка путем интерполяции точек и.(меренно1) но- ве хности. Способ может бьггь реа,1изован на базе известньгх устройств д,1я автоматического измерения колодок с ии(|)ров1)1м выходом. 2 и, 1. «о (Л со ьо со О5
21
CPUS . 2
(л)стави rt jb ,Ч IpiixiipuBij 1 макт11|) Л. Бандур: Техред И. ВересКорректор В. Бутнга
Зака ) 3511), 7Тираж 39КПодписное
BII1I11I1H Государственного комигета C.C.C.V но делам н юбретений н открытий
1 13035. ЛДосква, Ж 35. Раушская наб.. д. -l/S I IpoH в()дст1н нно-и()ли1-рафическое н)едн|)ннгис. i жгo|loд, ул. 1р(1сктняя, 4
| Замарашкин Н | |||
| В., Комиссаров А | |||
| Г., Лебедев Г | |||
| В | |||
| Средства для автоматического обмера обувны.х колодок и деталей обуви | |||
| - Кожевенно-обувная нромьинлен- ность | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
