Изобретение относится к области оптических бесконтактных измерений геометрических параметров формы, положения, движения и деформации объектов в пространстве, в частности, к ближней фотограмметрии и видеограмметрии, и может применяться в научных исследованиях, в машиностроении, строительстве, медицине, и в других областях для измерений геометрических параметров объектов в условиях стесненного окружающего пространства и ограниченного оптического доступа.
Известны многочисленные оптические способы и устройства бесконтактных измерений геометрических параметров объектов. Наиболее широко известными являются методы фотограмметрии [Лобанов А.Н. Фотограмметрия. - М.: Недра, 1984]. Основное назначение фотограмметрии состоит в измерениях геометрических параметров участков поверхности земли по аэроснимкам и снимкам из космоса, т.е. с большого расстояния. Это так называемая фотограмметрия дальней зоны. Также эти методы применяются и для бесконтактных измерений геометрических параметров объектов на коротких расстояниях в единицы и десятки метров - это фотограмметрия ближней зоны или ближняя фотограмметрия. В последнее время методы фотограмметрии реализуются с применением цифровых средств регистрации изображений и называются цифровой фотограмметрией или видеограмметрией. Фотограмметрия ближней зоны широко применяется в научных исследованиях, промышленном производстве, строительстве, медицине и др. областях.
Суть фотограмметрии состоит в определении трех координат x, y, z точки поверхности исследуемого объекта по двум координатам u, v центральной проекции ее на плоское изображение. В общей постановке такая задача некорректна: для каждой точки имеются три неизвестных и только два уравнения. В ближней фотограмметрии можно сформулировать три пути разрешения неопределенности задачи восстановления координат:
Первый путь - стереосъемка. При этом регистрируют два изображения объекта с разных ракурсов (точек наблюдения) и восстанавливают три координаты, комбинируя значения координат точек двух изображений [Патент РФ №2173445 С1, МПК G01C 11/00, 2000]. В более сложных случаях может понадобиться три или более изображений с разных ракурсов. Для реализации метода стереосъемки необходимы, по меньшей мере, две
регистрирующие изображения камеры или получение двух кадров с помощью одной камеры последовательно из разных точек, если исследуемый объект статичный.
Второй путь - применение структурированного освещения исследуемого объекта, в частности, секущей световой плоскостью или коллимированным пучком лучей света [Патент РФ №2105265 С1, МПК G01B 11/24, 1994]. В этом случае систему уравнений дополняют уравнением, описывающим известные траектории распространения лучей света. Для реализации методов структурированного освещения достаточно одной камеры, но дополнительно необходим проектор, обеспечивающий формирование пучка лучей структурированного освещения.
Третий путь - использование априорной информации, т.е. данных, полученных из других источников. Это может быть, в частности, заранее известная информация об ограниченности степеней свободы объекта, о взаимном расположении ряда характерных точек, о характере движения или деформации объекта и др. Реализация этого направления чаще всего сводится к методу маркерных точек, при котором на поверхность исследуемого объекта наносятся специальные маркеры, хорошо различимые на получаемых изображениях [Патент РФ №2316726 С1, МПК G01B 11/16, 2006]. Маркерами могут быть кружочки, крестики, линии и более сложные кодированные метки и мишени [Тюфлин Ю.С., Степаньянц Д.Г., Князь В.А., Желтов С.Ю. Предвычисление точности определения координат точек объекта в ближней фотограмметрии // Геодезия и картография. - 2004. №11. - С.29-32]. Информации об исходных координатах этих маркеров на поверхности объекта обычно бывает достаточной для разрешения неопределенности задачи восстановления трех координат точек поверхности объекта в пространстве по двум координатам отклика этих точек на изображениях.
Известны многочисленные способы и устройства, предназначенные для бесконтактных измерений геометрических параметров объектов. Большинство из них основано на методе стереосъемки и предназначено для измерений геометрических параметров контуров и рельефа местности посредством аэросъемки или космической съемки поверхности земли [Бруевич П.Н. Фотограмметрия. Учебник для вузов. - М.: Недра, 1990, С.285].
Существует большое число коммерческих устройств цифровой фотограмметрии для измерений геометрических параметров объектов в ближней зоне (1-5 м), построенных по схеме как с одной, так и с двумя и более камерами для регистрации центральной проекции в виде изображений, содержащие средство измерения координат проекций маркеров на изображении, информационно соединенное посредством USB-, GigE-, или иного интерфейса с устройством регистрации центральной проекции и средством определения параметров внешнего ориентирования (высокопроизводительный ноутбук и программное обеспечение) [Проспект систем SmartSCAN и StereoScan фирмы "Cybercom Ltd." //<http://www.cybercom.ru>].
Общим недостатком способов и устройств стереосъемки и устройств с применением структурированного освещения, является необходимость применения двух и более устройств регистрации центральной проекции или пректоров структурированного освещения в нескольких позициях (точках пространства). Однако в экспериментальной аэродинамике, промышленном производстве и в ряде других случаев исследуемый объект обычно находится в условиях стесненного окружающего пространства и ограниченного оптического доступа, например, в рабочей части аэродинамической трубы, или в испытательной камере, имеющих ограниченное число оптических окон, либо на станке, конвейере или стенде. Размещение двух камер для образования стереобазы или камеры и проектора, как в способе с применением структурированного освещения, зачастую оказывается неразрешимой проблемой. Кроме того, специфические особенности исследуемого объекта также могут препятствовать применению этих методов. Например, при исследованиях быстропротекающих динамических процессов из-за неизбежной задержки импульсов в электронных цепях системы синхронизации оказывается невозможным обеспечение строго одновременного срабатывания двух камер или камеры и проектора, в результате чего совмещение данных с разных устройств может приводить к значительным ошибкам измерений.
Другой недостаток известных способов стереометрии заключается в том, что он предназначен для измерений геометрических параметров недеформируемых статичных объектов на поверхности земли, характеризующихся единой математической моделью. Большинство задач научных исследований связано с объектами, подверженными значительным деформациям, или даже с композицией отдельных фрагментов объекта, имеющих разные геометрические закономерности формы, движения и деформации. Применение способа к исследованиям таких объектов приводит к неконтролируемым погрешностям измерений или вовсе оказывается невозможным.
Наиболее эффективным способом бесконтактных измерений геометрических параметров объекта в таких условиях оказывается метод маркеров с использованием только одной камеры. Известен способ и устройство для измерения малых деформаций материала конструкций [Патент РФ №2316726 С1, МПК G01B 11/16, 2006], при котором на поверхность исследуемого объекта наносят маркеры, в заданные моменты времени регистрируют центральную проекцию этих маркеров в виде изображений и определяют деформации материала конструкций по смещениям проекций этих маркеров на изображениях.
Способы и устройства с использованием априорной информации наиболее просты в технической реализации - для них требуется только одна цифровая камера и одна точка наблюдения. Это обстоятельство дает существенное преимущество в применении этих методов, особенно в условиях стесненного окружающего объект пространства или ограниченного оптического доступа к нему, что характерно, например, для аэродинамического, прочностного, летного или иного эксперимента, промышленного производственного контроля.
Наиболее близким решением является способ бесконтактных измерений геометрических параметров объекта в пространстве с помощью одной камеры [A.W. Burner, N. Liu. "Videogrammetric Model Deformation Measurement Technique". Journal of Aircraft, vol.38, No.3, 2001], выбранный в качестве прототипа, при котором на поверхность объекта в заданных точках наносят маркеры, регистрируют центральную проекцию этих маркеров в виде изображения, определяют параметры внешнего ориентирования центральной проекции, а при обработке изображений измеряют двухмерные координаты проекций маркеров на изображении, из которых по формулам центральной проекции с использованием определенных параметров внешнего ориентирования вычисляют координаты маркеров в пространстве, а из них находят искомые геометрические параметры объекта в пространстве.
Устройство для осуществления указанного способа, также выбранное в качестве прототипа [A.W. Burner, N. Liu. "Videogrammetric Model Deformation Measurement Technique". Journal of Aircraft, vol.38, No.3, 2001], включает средство нанесения маркеров на поверхность исследуемого объекта, устройство регистрации центральной проекции маркеров в виде изображения, средство определения параметров внешнего ориентирования устройства регистрации центральной проекции, блок измерения координат проекций маркеров на изображении и блок вычисления искомых геометрических параметров объекта.
Недостаток этого способа и устройства заключается в том, что он предусматривает измерение только координат точек поверхности объекта в пространстве, тогда как целью всякого научного исследования является определение обобщенных геометрических параметров, соответствующих выбранной гипотезе или модели исследуемого процесса, объекта. Для нахождения обобщенных параметров из измеренных координат требуются дополнительные данные, дополнительные процедуры и дополнительные вычисления, что приводит к возрастанию погрешности измерений. Это особенно проявляется при оптимизации результатов исследований, так как измерение координат точек без учета модели процесса требует одних критериев оптимизации, а привязка процесса к координатам - других. И эти критерии оптимизации часто оказываются взаимно несовместимыми, что зачастую может приводить к конфликтам в многомерной минимизации и, как следствие, к неконтролируемым ошибкам измерений и снижению их достоверности.
Техническим результатом предлагаемого изобретения является повышение точности и достоверности измерений геометрических параметров объекта при использовании одной камеры, особенно в условиях стесненного окружающего пространства и ограниченного оптического доступа.
Технический результат достигается тем, что в способе бесконтактных измерений геометрических параметров объекта в пространстве, при котором на поверхность объекта в заданных точках наносят маркеры, регистрируют центральную проекцию этих маркеров в виде изображения, определяют параметры внешнего ориентирования центральной проекции, а при обработке изображений измеряют двухмерные координаты проекций маркеров на изображении, из которых по формулам центральной проекции с использованием определенных параметров внешнего ориентирования вычисляют координаты маркеров в пространстве, а из них находят искомые геометрические параметры объекта в пространстве, согласно изобретению, на основе заранее известных геометрических закономерностей исследуемого объекта на его поверхности выделяют или создают дополнительно обособленные зоны, характеризующиеся собственными геометрическими параметрами, для каждой из них задают собственную систему координат, формируют собственную математическую параметрическую модель, собственные параметры которой связаны с искомыми геометрическими параметрами объекта известными геометрическими закономерностями, и присоединяют собственную математическую параметрическую модель к формулам центральной проекции, кроме того при нанесении маркеров на поверхность их группируют по обособленным зонам в обособленные группы, а при обработке изображений для каждой из этих обособленных групп выделяют двухмерные координаты проекций маркеров на изображении, определяют собственные параметры внешнего ориентирования центральной проекции и из них по формулам центральной проекции и присоединенной собственной математической параметрической модели с использованием собственных параметров внешнего ориентирования вычисляют методами многомерной минимизации расхождений собственные параметры соответствующей математической модели, а искомые геометрические параметры объекта находят, используя вычисленные собственные параметры математических моделей и заранее известные геометрические закономерности.
Дополнительно технический результат в способе достигается тем, что на основе заранее известных геометрических закономерностей исследуемого объекта одну из обособленных зон выделяют или создают дополнительно так, чтобы можно было считать точки ее поверхности взаимно неподвижными, принимают ее за базовую, для нее определяют параметры взаимного расположения маркеров в собственной системе координат и собственные параметры внешнего ориентирования центральной проекции базовой зоны, при формировании собственной математической параметрической модели базовой зоны учитывают параметры взаимного расположения маркеров в ней, а при обработке изображений собственные параметры всех других собственных математических моделей вычисляют с использованием собственных параметров внешнего ориентирования центральной проекции базовой зоны и искомые геометрические параметры объекта находят в системе координат базовой зоны.
Во многих случаях повышению точности измерений способствует также то, что на основе заранее известных геометрических закономерностей исследуемого объекта обособленные зоны выделяют или создают дополнительно в виде сечений так, чтобы в каждой из них можно было считать точки поверхности взаимно неподвижными и перемещающимися как целое, при формировании собственных математических параметрических моделей сечений определяют параметры взаимного расположения маркеров в их собственных системах координат, собственные математические параметрические модели формируют в виде уравнений положения и движения указанных собственных систем координат сечений, а при обработке изображений определяют собственные параметры внешнего ориентирования центральной проекции сечений и искомые геометрические параметры объекта находят из значений собственных параметров внешнего ориентирования каждого сечения.
Указанный технический результат достигается тем, что в устройство бесконтактных измерений геометрических параметров объекта в пространстве, содержащее средство нанесения маркеров на поверхность исследуемого объекта, устройство регистрации центральной проекции маркеров в виде изображения, средство определения параметров внешнего ориентирования устройства регистрации центральной проекции, блок измерения координат проекций маркеров на изображении и блок вычисления искомых геометрических параметров объекта, согласно изобретению, дополнительно введены средство создания обособленных групп маркеров, связанное со средством нанесения маркеров на поверхность исследуемого объекта, средство определения параметров взаимного расположения маркеров в обособленной группе, средство формирования математических параметрических моделей для обособленных групп маркеров, информационно связанное со средством создания обособленных групп маркеров и средством определения параметров взаимного расположения маркеров, блок выделения обособленных групп проекций маркеров на изображении, подключенный к блоку измерения координат проекций маркеров на изображении, и блок многомерной минимизации расхождений для каждой обособленной группы маркеров, подключенный своим входом к блоку выделения обособленных групп проекций маркеров и информационно связанный со средством формирования математических параметрических моделей и средством определения параметров внешнего ориентирования, а выходом - с блоком вычисления искомых геометрических параметров объекта.
Технический эффект в способе и устройстве во всех случаях достигается благодаря оптимальному использованию априорной информации как для разрешения неопределенности задачи восстановления координат точек объекта в пространстве, так и для согласования геометрических параметров обособленных зон с общими параметрами положения, движения и деформации объектов в пространстве. При этом задачи математической регрессии для многомерной минимизации предлагается формулировать в связи с математической моделью исследуемого процесса, что ведет к сокращению числа интегральных преобразований, количества степеней свободы в задачах регрессии и, тем самым, к минимизации методических и вычислительных ошибок определения искомых обобщенных геометрических параметров.
Перечень фигур, иллюстрирующих работу предложенного способа и устройства.
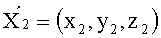
На фиг.1 показана структурная схема устройства бесконтактных измерений геометрических параметров объекта в пространстве для осуществления указанного способа.
На фиг.2 показана схема, иллюстрирующая предложенный способ бесконтактных измерений геометрических параметров объекта в пространстве с выделением обособленных зон, характеризующихся своими геометрическими параметрами.
На фиг.3 показана схема выделения обособленных зон на поверхности модели крыла самолета.
На фиг.4 показана схема устройства с выделением обособленных сечений на поверхности модели крыла самолета и базовой зоны на основании крепления модели.
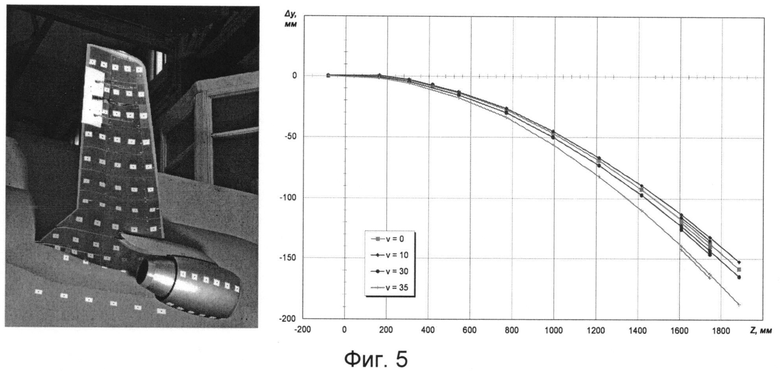
На фиг.5 приведен пример рабочего изображения упругоподобной модели крыла в аэродинамической трубе Т-103 ЦАГИ и график результатов измерений деформации изгиба при разных значениях скорости набегающего потока.
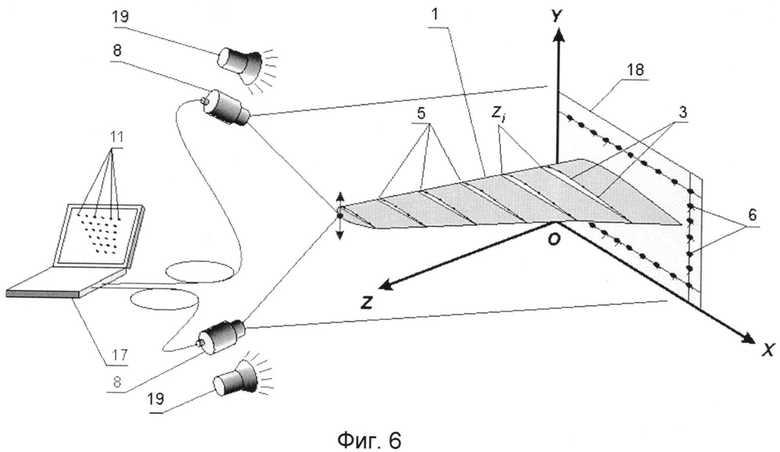
На фиг.6 показана схема устройства для измерения деформаций одновременно верхней и нижней поверхностей модели крыла самолета.
На фиг.7 приведены фотографии установки для исследований деформации верхней и нижней поверхностей модели крыла самолета в аэродинамической трубе Т-101 ЦАГИ.
На фиг.8 показан результат измерений формы предкрылка крыла самолета в отклоненном и неотклоненном положениях в 10 сечениях крыла (280 точек).
На фиг.9 показан пример реализации способа и устройства для исследований деформации коробления крупномасштабных образцов и элементов конструкции при прочностных исследованиях.
На фиг.10 приведен результат измерения поля нормальной деформаций конструктивной панели самолета.
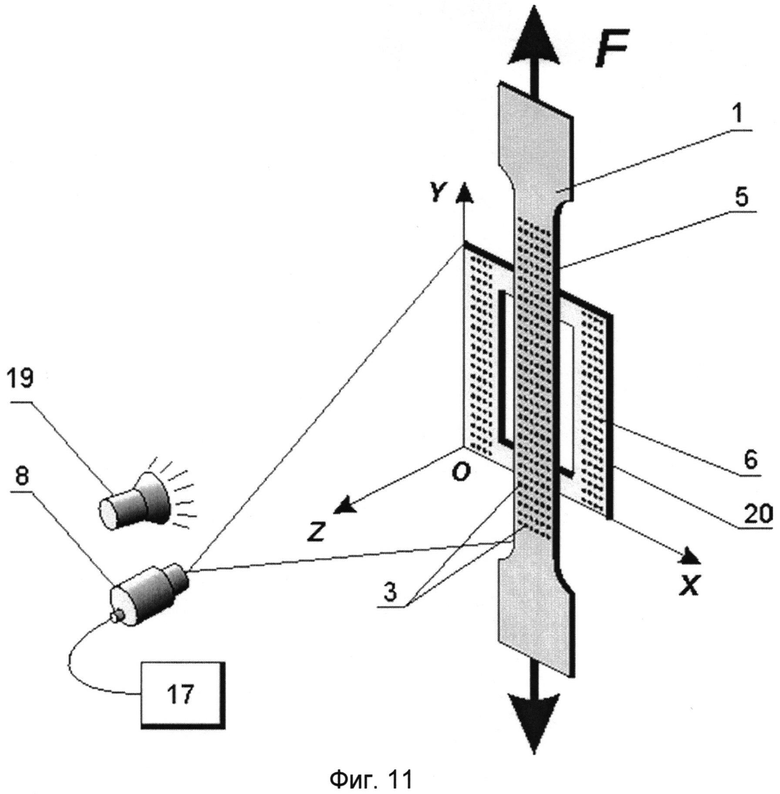
На фиг.11 показана схема бесконтактных измерений распределенных касательных деформаций элементов конструкции при их растяжении при прочностных исследованиях с добавлением базовой зоны.
На фиг.12 показан результат измерений этим способом полей двух компонентов касательной деформации конструктивной панели из композиционного материала со щелью на стенде для статических испытаний на прочность.
На фиг.13 показана схема устройства для осуществления способа бесконтактных измерений геометрических параметров положения объекта в пространстве.
На фиг.14 приведены рабочие изображения вертолетного прибора в двух угловых положениях и графики результатов измерений линейных смещений и углов ориентации модели на разных режимах в потоке аэродинамической трубы Т-104 ЦАГИ.
Структурная схема устройства для реализации предложенного способа бесконтактных измерений геометрических параметров объекта в пространстве показана на фиг.1. На схеме условно показаны:
1 исследуемый объект;
2 средство нанесения маркеров на поверхность исследуемого объекта;
3 маркеры;
4 средство создания обособленных групп маркеров, связанное со средством 2 нанесения маркеров на поверхность исследуемого объекта;
5 обособленная группа маркеров;
6 базовая группа маркеров;
7 средство определения параметров взаимного расположения маркеров в обособленной группе,
8 устройство регистрации центральной проекции маркеров в виде изображения - камера;
9 средство определения параметров внешнего ориентирования устройства 8 регистрации центральной проекции,
10 центральная проекция - изображение;
11 проекции маркеров на изображении;
12 средство формирования математических параметрических моделей для обособленных групп 5 и 6 маркеров, информационно связанное со средством 4 создания обособленных групп маркеров и средством 7 определения параметров взаимного расположения маркеров,
13 блок измерения координат проекций маркеров на изображении;
14 блок выделения обособленных групп проекций маркеров на изображении, подключенный к блоку 13 измерения координат проекций маркеров;
15 блок многомерной минимизации расхождений для каждой обособленной группы маркеров, подключенный своим входом к блоку 14 выделения обособленных групп проекций маркеров, и информационно связанный со средством 12 формирования математических параметрических моделей и средством 9 определения параметров внешнего ориентирования;
16 блок вычисления искомых геометрических параметров объекта, подключенный своим входом к блоку 15 многомерной минимизации расхождений;
17 подсистема сбора и обработки изображений, объединяющая блоки 13-16;
18 основание исследуемого объекта;
19 источник света.
Функциональные блоки 13-16, образующие подсистему 17 сбора и обработки изображений, обычно реализуется на базе персонального или мобильного компьютера.
При регистрации центральной проекции функциональная зависимость искомых координат x, y, z точек в пространстве от измеренных на изображении координат u, v проекций этих точек имеет вид

Здесь: x0, y0, z0 - координаты центра проекции в системе координат объекта,
u0, v0, w0 - координаты начала системы координат (СК) изображения в системе координат камеры,
Mij (i, j=1, 2, 3) - элементы матрицы направляющих косинусов системы координат камеры последовательно на углы α, β, γ вокруг координатных осей СК объекта. Матрица направляющих косинусов может иметь несколько разных вариантов представления через углы последовательных поворотов в виде матрицы вращения, в частности, такой

Таким образом, функциональная зависимость (1) определяется набором по меньшей мере девяти констант. Шесть из них x0, y0, z0 и α, β, γ определяют положение и ориентацию устройства регистрации центральной проекции в системе координат объекта. В фотограмметрии их принято называть параметрами внешнего ориентирования, а три оставшихся u0, v0, w0 - параметрами внутреннего ориентирования. Параметры u0, v0 являются координатами главной точки изображения, а w0 - задним сопряженным расстоянием объектива. При регистрации удаленного объекта величина w0 близка к фокусному расстоянию объектива. При использовании в качестве устройства регистрации центральной проекции цифровых камер параметры внутреннего ориентирования удобнее выражать в единицах дискретности изображения - пикселях. К параметрам внутреннего ориентирования причисляют также параметры геометрических искажений изображения, такие как коэффициенты дисторсии, разномасштабности и др.
Параметры внутреннего ориентирования являются характеристикой устройства регистрации центральной проекции (камеры). Их определяют обычно отдельной процедурой при настройке устройства регистрации центральной проекции.
Маркеры на поверхность исследуемого объекта наносят с помощью разнообразных средств. Это могут быть лазерные принтеры, краскопульты с трафаретами, кисточки с краской, маркеры и другие средства. Хорошо себя зарекомендовала методика, при которой единичные или группы маркеров печатают с помощью лазерного принтера на самоклеющуюся бумагу, а затем наклеивают их на поверхность исследуемого объекта. Маркеры 3 могут иметь любую форму, быть плоскими сосредоточенными метками, мелкомасштабными регулярными или нерегулярными структурами, объемными мишенями, распределенными по поверхности систематически или случайно. Они должны быть хорошо различимыми на изображениях и поддаваться идентификации, т.е. установлению однозначного соответствия их пространственных координат и двухмерных координат их проекций на изображениях.
Центральную проекцию регистрируют в виде изображения с помощью разных средств, условно называемых камерами. Это могут быть, например, фото-, кино-, видео- или цифровые камеры, регистрирующие изображение объекта в оптическом, инфракрасном, ультрафиолетовом или другом диапазоне спектра, могут быть оптическими, лазерными, радиолокационными, акустическими сканерами или другими устройствами, формирующим центральную проекцию объекта в виде изображения.
Параметры внешнего ориентирования центральной проекции определяют, как правило, в процедуре калибровки с помощью дополнительных средств, называемых контрольными приспособлениями или тест-объектами, содержащими набор маркеров с известными координатами в пространстве. Тест-объект помещают в пространство измерений, регистрируют его центральную проекцию в виде изображения и измеряют двухмерные координаты проекций маркеров на изображении. Зная исходные координаты маркеров тест-объекта и измеренные координаты проекций этих маркеров на изображении, методами многомерной минимизации расхождений по формулам центральной проекции (1) вычисляют численные значения параметров внешнего ориентирования центральной проекции.
При обработке цифровых изображений двухмерные координаты проекций маркеров на изображении измеряют в компьютере с помощью специализированных программ, обеспечивающих измерения двухмерных координат заданных особенностей изображения методами анализа групповой статистики, корреляционного анализа, последовательного слежения и др. Эти методы позволяют измерять координаты точек изображения с субпиксельной погрешностью, достигающей 0.1-0.01 доли пикселя.
Обычно из этих координат по формулам центральной проекции с использованием определенных параметров внешнего ориентирования вычисляют координаты маркеров в пространстве, а из них находят искомые геометрические параметры объекта в пространстве.
Однако функциональной зависимости (1) недостаточно для достоверного нахождения искомых координат х, y, т.к. в правую часть уравнений входит неизвестная координата z. Согласно методу априорной информации система (1) должна быть дополнена еще одним уравнением, представляющим собой математическую модель формы, положения, движения или деформации, например, в виде

где Р - вектор собственных параметров, характеризующих объект или исследуемый процесс в целом или отдельную его зону.
При обработке данных зависимость (3) присоединяют к рабочей характеристике (1) и, решают полученную систему уравнений относительно х, y и z.
В общем случае для всей поверхности исследуемого объекта единую математическую модель (3) заранее составить не представляется возможным, т.к. зачастую в этом и состоит конечная цель исследований и измерений. Однако всегда на основе заранее известных геометрических закономерностей исследуемого объекта на его поверхности можно выделить одну, две или более обособленных зон, характеризующихся своими обособленными геометрическими параметрами, для которых можно заранее составить несколько разных упрощенных математических параметрических моделей. Поэтому для повышения точности и достоверности результатов измерений геометрических параметров объекта в пространстве на основе заранее известных геометрических закономерностей исследуемого объекта на его поверхности выделяют или создают дополнительно обособленные зоны, характеризующиеся собственными геометрическими параметрами формы, положения, движения и деформации. Для каждой из них задают собственную систему координат, формируют собственную математическую параметрическую модель (3), собственные параметры Р которой связаны с искомыми геометрическими параметрами объекта известными геометрическими закономерностями, и присоединяют собственную математическую параметрическую модель к формулам центральной проекции (1). При нанесении маркеров на поверхность их группируют по обособленным зонам в обособленные группы, а при обработке изображений для каждой из этих обособленных групп выделяют двухмерные координаты проекций маркеров на изображении, определяют собственные параметры внешнего ориентирования центральной проекции и из них по формулам центральной проекции (1) и присоединенной собственной математической параметрической модели (3) с использованием собственных параметров внешнего ориентирования вычисляют методами многомерной минимизации расхождений собственные параметры соответствующей математической модели.
Искомые геометрические параметры объекта находят, используя вычисленные собственные параметры математических моделей и заранее известные геометрические закономерности.
Схема на фиг.2 иллюстрирует существо способа. На схеме показаны исследуемый объект 1, маркеры 3, группы маркеров 5, устройство (камера) 8 для регистрации центральной проекции в виде изображения и центральная проекция (изображение) 10. Пусть исследуемая поверхность 1 совершает некоторые сложные движения и деформации. На схеме приведены два состояния этой поверхности. Формализовать эти движения единым уравнением не представляется возможным. Однако на поверхности исследуемого объекта выделяют зоны I-VII так, например, что зону/можно считать неподвижной, зону II как совершающую параллельные перемещения, зону III как совершающую угловые наклоны, зоны IV и V - совершающие линейные перемещения и изгиб, а зоны VI и VII - линейные перемещения, наклоны и изгибы. Для каждой зоны составляют свою упрощенную математическую параметрическую модель (3).
При нанесении маркеров на поверхность их группируют по выделенным зонам, а при обработке изображения выделяют соответствующие группы проекций маркеров на изображении и измеряют их двухмерные координаты. После этого для каждой группы маркеров составляют математическую нелинейную регрессию, связывающую измеренные координаты маркеров на изображении с искомыми координатами маркеров в пространстве посредством системы уравнений (1) и (3) с использованием определенных ранее параметров внешнего ориентирования. Решив регрессию методами многомерной минимизации расхождений (обычно методом наименьших квадратов), находят искомые координаты маркеров в пространстве, а также значения обособленных параметров соответствующих математических моделей. В ряде случаев найденные координаты маркеров в пространстве являются окончательным результатом измерений. В других случаях больший интерес представляют обобщенные геометрические параметры, которые находят, используя известные закономерности, из обособленных параметров Р соответствующих математических моделей. Регрессию можно построить, в частности так, что результатом ее решения станут собственные параметры внешнего ориентирования в системе координат соответствующей зоны.
Наиболее актуальная задача экспериментальной аэродинамики связана с измерениями деформации несущих элементов конструкции с аэродинамической профилировкой: крыльев, элементов хвостового оперения, органов управления, лопастей воздушных и несущих винтов и др. Все они характеризуются большим удлинением и жесткостью вдоль продольной оси, многократно превосходящей жесткость по двум другим осям. На фиг.3 приведена схема реализации способа бесконтактных измерений геометрических параметров деформации модели крыла самолета в потоке аэродинамической трубы. На схеме показаны исследуемый объект 1, маркеры 3, группы маркеров 5, устройство (камера) 8 для регистрации центральной проекции в виде изображения и выделенные зоны поверхности объекта I-III. Направим ось Oz вдоль оси жесткости крыла. Можно считать, что вдоль этой оси деформация пренебрежимо мала, а поперечные сечения как целые приобретают линейные Δх, Δy и угловые Δα смещения в перпендикулярной к оси Oz плоскости. Координата z сечений в общем случае не может считаться постоянной, но в силу малости ее изменений математические модели можно задать в виде разложения в ряд по степеням малых отклонений по осям Ох и Oy

где коэффициенты ax, ay, bx, by, … задаются согласно известной матрице жесткости объекта. При этом на оси Oz можно выделить ряд зон, в которых математические модели имеют простой вид:
- в зоне z=z01=const
- в зоне z=z02+ax·Δx2+ay·Δy2
- в зоне III  , и т.д.
, и т.д.
В задачах ближней фотограмметрии и видеограмметрии устройством регистрации центральной проекции в виде изображения обычно служит цифровая камера или видеокамера. Средством создания и выделения групп маркеров могут являться средства нанесения маркеров непосредственно на поверхность исследуемого объекта краской (черной на светлом фоне или белой на темном) в виде в виде круглых, овальных или иной формы пятнышек, крестиков, линий или меток более сложной формы. Удобным средством нанесения маркеров оказался лазерный принтер, распечатывающий заданной формы маркеры на самоклеящуюся бумагу с последующим наклеиванием. Часто применяются средства нанесения маркеров в виде самоклеющейся световозвращающей пленки, также наклеиваемой на поверхность объекта. В этом случае достигается высокая световая эффективность. Этот способ нанесения маркеров имеет преимущества при исследованиях крупногабаритных объектов, когда освещение его представляет техническую сложность, либо быстропротекающих процессов, когда необходима очень короткая экспозиция. В ряде случаев маркеры могут представлять собой самостоятельные конструкции (мишени), обладающие свойством световозвращения, и крепящиеся на поверхности объекта механически.
Средство 7 определения параметров взаимного расположения маркеров в группе может представлять собой инструментальные измерительные средства, контактные или оптические, специальные тест-объекты, устанавливаемые на месте исследуемой группы маркеров с совмещением систем координат.
Подсистема 17 сбора и обработки изображений представляет собой обычно компьютер или ноутбук с соответствующим пакетом программ, однако возможно применение и автономных средств регистрации и сохранения изображений, например, в памяти самой камеры, что характерно для высокоскоростных камер.
Средство определения параметров внешнего ориентирования (средство калибровки) представляет собой специальные тест-объекты, содержащие группу маркеров, координаты которых заранее измерены с точностью, превосходящей планируемую точность измерительной системы. Эти тест-объекты могут иметь линейную форму с расположением маркеров по одной координате, плоскую форму с расположением маркеров по двум координатам, или объемную конструкцию с маркерами, расположенными в пространстве. Средства определения параметров внешнего ориентирования обычно должно быть дополнено средствами ориентации тест-объекта и привязки систем координат.
Источники света 19 могут быть непрерывными, импульсными или стробоскопическими в зависимости от характера решаемой задачи. Они могут отличаться принципом действия (лампы накаливания, газоразрядные, полупроводниковые, искровые, люминесцентные и т.д.) мощностью или энергией и спектром излучения.
Предложенный способ измерений в различных вариантах исполнения прошел опробование в экспериментальной аэродинамике при исследованиях аэроупругости и прочности аэродинамических моделей и элементов конструкции летательных аппаратов в следующих актуальных задачах:
- исследования деформации «жестких», упругоподобных и динамическиподобных моделей летательного аппарата в потоке аэродинамической трубы;
- измерения параметров положения закрепленных моделей летательного аппарата в потоке аэродинамической трубы;
- измерения параметров движения в пространстве свободнолетающих моделей;
- исследования движения и деформации вращающихся элементов конструкции: лопастей, лопаток и др.;
- исследования полей касательных деформаций образцов новых конструкционных материалов и элементов конструкции из них;
- исследования коробления и потери устойчивости оболочек, обшивок и элементов конструкции летательных аппаратов.
Рассмотрим наиболее характерные примеры реализации способа и устройства.
а) Измерительная система (камера) и основание (место крепления) исследуемого объекта взаимно неподвижны, а исследуемый объект имеет ограниченные степени свободы. В этом случае выбирают направление, в котором смещения точек объекта минимальны и ориентируют ось OZ рабочей системы координат вдоль этого направления. При нанесении маркеров на поверхность образца их группируют по сечениям, перпендикулярным оси OZ. При составлении математической параметрической модели измеряют координату z этих сечений инструментальными средствами, задают уравнения (3) возможных изменений этой координаты при движениях объекта и дополняют ими систему уравнений (1). В силу малости смещений по оси Oz, такая математическая модель может быть очень простой.
б) Если для тех же объектов исследований нельзя считать, что камера и основание объекта взаимно неподвижны, то на объекте или его основании, согласно п.2 формулы изобретения, выделяют или создают дополнительно базовую зону, в которой можно считать точки поверхности взаимно неподвижными (например, зоны I на фиг.2 и фиг.3). Трехмерные координаты маркеров на ней заранее измеряют инструментальными средствами в ее собственной или связанной с основанием объекта системе координат. Создают базовую параметрическую модель для базовой группы маркеров, составляют и решают математическую регрессию, а по найденным из регрессии параметрам определяют новые параметры внешнего ориентирования для функциональной зависимости (1), которые затем применяют при решении регрессий для остальных зон. В результате этого координаты маркеров в пространстве и геометрические параметры соответствующих зон будут найдены в собственной системе координат базовой зоны или связанной с основанием объекта.
На фиг.4 показана схема бесконтактных измерений деформаций модели крыла самолета в потоке воздуха аэродинамической трубы. На схеме показаны: исследуемый объект 1, маркеры 3, обособленные группы маркеров 5, нанесенные на измерительные зоны поверхности объекта в виде сечений, базовая группа маркеров 6, устройство (камера) 8 для регистрации центральной проекции в виде изображения, средство 9 определения параметров внешнего ориентирования, подсистема 17 сбора и обработки изображений, основание 18 исследуемого объекта. Модель консольно закреплена на плоском основании 18. В потоке воздуха под действием аэродинамических нагрузок и модель претерпевает смещения и деформации, а основание - только смещения как целое. Поэтому базовая группа маркеров 6 выделена на основании 18, и результаты измерений линейных и угловых смещений сечений 5 крыла будут представлены в системе координат, связанной с основанием. Пример рабочего изображения (центральной проекции) упругоподобной модели крыла в аэродинамической трубе Т-103 ЦАГИ и график результатов измерений деформации изгиба при разных значениях скорости набегающего потока воздуха приведены на фиг.5. Черные маркеры круглой формы были напечатаны лазерным принтером на белой самоклеющейся бумаге, бумага нарезана на квадратики и квадратики наклеены в заданных сечениях на нижнюю поверхность модели. Нижний ряд маркеров наклеен на основание и служит базой для измерений.
в) При исследованиях крупномасштабных объектов или объектов сложной формы, когда область исследований нельзя охватить одной центральной проекцией (одной камерой), рекомендуется регистрировать две или более центральные проекции разных участков поверхности объекта в виде отдельных изображений, а на его поверхности наносить несколько измерительных групп маркеров по числу камер и одну или более дополнительных, базовых, так, чтобы измерительные группы маркеров попадали каждая в поле зрения своей камеры, а базовые - хотя бы частично, в поле зрения двух или более камер одновременно. При обработке изображений камер, охваченных одной группой базовых маркеров, целесообразно определять дополнительные функциональные зависимости системы координат точек в пространстве от СК точек каждого изображения, причем систему координат точек в пространстве и математическую параметрическую модель задавать общими для всех центральных проекций, а математические регрессии составлять, отдельно для каждой центральной проекции. Решая регрессии, можно определять параметры математических моделей, из которых находить искомые параметры формы, движения и деформации всего исследуемого объекта.
Подробнее работу этого способа в наиболее характерном варианте применения рассмотрим на примере измерений деформации упругого предкрылка крупномасштабной модели крыла самолета в потоке большой аэродинамической трубы Т-101 ЦАГИ. Исходя из требований задачи испытаний, была разработана измерительная система, которая содержит два идентичных канала для измерений деформации верхней и нижней поверхности носка модели одновременно. На фиг.6 показаны схема, а на фиг.7 фотографии, демонстрирующие реализации способа при измерениях деформации одновременно верхней и нижней поверхности модели крыла в потоке аэродинамической трубы. Две камеры 8 с приемными объективами расположены в левом отсекателе сверху и снизу симметрично хорды крыла. Одной камерой увидеть обе поверхности не представлялось возможным, поэтому были применены две камеры, а СК связаны группой маркеров, нанесенных на основание и попадающих в поле зрения обеих камер одновременно (см. фиг.7, в).
Важным элементом измерительной системы является система маркеров, наносимых на поверхность модели. Здесь использованы сосредоточенные маркеры в виде нанесенных на поверхность модели белых овальных пятнышек на черном фоне. Размеры и ориентация пятнышек выбирались такими, чтобы их центральные проекции на изображении имели круглую форму и одинаковый заданный диаметр около 5-7 пикселей. Назначение системы базовых маркеров состоит в обеспечении возможности совмещения систем координат двух камер с системой координат модели. Кроме того, в условиях, когда камеры не являются неподвижными из-за общей деформации модели и отсекателей, система базовых маркеров должна выполнять дополнительную роль - компенсацию смещений камер.
На фиг.8 приведен график с результатами измерений формы упругого носка предкрылка в отклоненном и неотклоненном положениях.
г) Еще один пример демонстрирует реализацию предложенного способа для бесконтактных измерений распределенной нормальной деформации конструкционной панели при исследованиях ее прочности (фиг.9). Панель, подверженная нагружению сжатия, претерпевает деформацию коробления в локальной области поверхности, в центр которой помещено начало системы координат. Периметр этой области, подкрепленный ребрами жесткости, не испытывает деформации коробления. Поэтому на исследуемой области поверхности выделено две зоны, одна по периметру принимается за базовую, а другая, в середине - область измерений. Применив рассмотренный вариант способа измерений, получим распределение нормальной деформации коробления во второй зоне в системе координат, заданной первой зоной. Пример результата таких измерений показан на фиг.10.
д) Нередки случаи, когда на поверхности объекта нет недеформируемой зоны, которую можно принять за базовую. Тогда целесообразно в поле зрения камеры ввести дополнительный объект, не подверженный деформации, и на его поверхность нанести базовую группу маркеров с предварительно измеренными трехмерными координатами. На фиг.11 показана схема бесконтактных измерений распределенных касательных деформаций элементов конструкции при их растяжении при прочностных исследованиях с добавлением базовой зоны. При нагрузке весь образец деформируется, поэтому в качестве базовой зоны введен дополнительный элемент 20, на котором размещена базовая группа маркеров 6. Дополнительный элемент 20 полужестко связан с образцом 1 так, что, оставаясь недеформированным, он не вносит искажений в картину деформации. На фиг.12 показан результат измерений этим способом полей двух компонентов касательной деформации конструктивной панели из композиционного материала со щелью при испытаниях на прочность.
е) В частном случае, когда все точки поверхности объекта можно считать взаимно неподвижными и перемещающимися как целое, согласно п.2 формулы, выделяют одну зону, принимают ее за базовую, при создании ее математической параметрической модели измеряют трехмерные параметры взаимного расположения маркеров в собственной системе координат, а при обработке изображений методами многомерной минимизации расхождений определяют значения параметров внешнего ориентирования, которые представляют собой геометрические параметры положения системы координат камеры в собственной СК объекта. Если полученные параметры обратить по правилам преобразования координат, то получим шесть параметров положения объекта в системе координат камеры. Для определения параметров положения объекта в заданной системе координат, не связанной с СК камеры, например, лабораторной, рекомендуется следующая процедура. Сначала объект устанавливают в исходное положение так, чтобы его система координат совпадала с заданной. Производят отсчет, согласно способу по п.2, и фиксируют начальные значения параметров внешнего ориентирования, векторном в виде 

где 
На фиг.13 показана схема устройства для осуществления способа бесконтактных измерений геометрических параметров положения объекта в пространстве. При испытаниях в аэродинамической трубе несущих винтов вертолета модель устанавливается на амортизаторах. Под действием тяги несущего винта и аэродинамических сил от набегающего потока положение модели изменяется, в частности, изменяется угол атаки модели, что приводит к значительным ошибкам в определении аэродинамических характеристик. Для коррекции результатов определения аэродинамических характеристик необходимо измерение текущих значений параметров положения модели в потоке аэродинамической трубы. Опыт показал, что такие измерения должны быть бесконтактными. Для выполнения таких измерений предложенным способом на модели создают базовую группу маркеров, взаимное расположение которых не может изменяться, измеряют трехмерные параметры взаимного расположения этих маркеров, производят отсчет в исходном положении модели, а затем в каждом текущем заданном положении. На фиг.14 показаны два рабочих изображения модели с базовыми маркерами в положениях с углами атаки α модели 0 (а) и -10° (б), а также графики линейных (в) и угловых (г) параметров, полученных рассматриваемым методом в серии испытаний измерений углов ориентации и линейных смещений модели вертолетного прибора на разных режимах в потоке аэродинамической трубы Т-104 ЦАГИ. Результаты измерений показали, что под действием сил угол атаки изменяется на 1-2°.









Изобретение относится к способу бесконтактных измерений геометрических параметров объекта в пространстве. При реализации способа на поверхности объекта выделяют одну и/или более обособленную зону, для которой можно заранее составить несколько разных упрощенных математических параметрических моделей на основании заранее известных геометрических закономерностей исследуемого объекта, характеризующих форму, положение, движение, деформацию. Наносят маркеры на поверхность объекта, группируя по обособленным зонам в обособленные группы. Далее регистрируют изображения центральной проекции указанных маркеров. И на их основании с учетом заранее известных геометрических закономерностей исследуемого объекта и с использованием методов многомерной минимизации расхождений определяют искомые геометрические параметры объекта. Технический результат - повышение точности и достоверности измерений геометрических параметров объекта при использовании одной камеры, особенно в условиях стесненного окружающего пространства и ограниченного оптического доступа. 2 н. и 2 з.п. ф-лы, 14 ил.
1. Способ бесконтактных измерений геометрических параметров объекта в пространстве, при котором на поверхность объекта в заданных точках наносят маркеры, регистрируют центральную проекцию этих маркеров в виде изображения, определяют параметры внешнего ориентирования центральной проекции, а при обработке изображений измеряют двухмерные координаты проекций маркеров на изображении, из которых по формулам центральной проекции с использованием определенных параметров внешнего ориентирования находят искомые геометрические параметры объекта в пространстве, отличающийся тем, что на основе заранее известных геометрических закономерностей исследуемого объекта на его поверхности выделяют или создают дополнительно обособленные зоны, характеризующиеся собственными геометрическими параметрами, для каждой из них задают собственную систему координат, формируют собственную математическую параметрическую модель, собственные параметры которой связаны с искомыми геометрическими параметрами объекта известными геометрическими закономерностями, и присоединяют собственную математическую параметрическую модель к формулам центральной проекции, кроме того, при нанесении маркеров на поверхность их группируют по обособленным зонам в обособленные группы, а при обработке изображений для каждой из этих обособленных групп выделяют двухмерные координаты проекций маркеров на изображении, определяют собственные параметры внешнего ориентирования центральной проекции и из них по формулам центральной проекции и присоединенной собственной математической параметрической модели с использованием собственных параметров внешнего ориентирования вычисляют методами многомерной минимизации расхождений собственные параметры соответствующей математической модели, а искомые геометрические параметры объекта находят, используя вычисленные собственные параметры математических моделей и заранее известные геометрические закономерности.
2. Способ по п.1, отличающийся тем, что на основе заранее известных геометрических закономерностей исследуемого объекта одну из обособленных зон выделяют или создают дополнительно так, чтобы можно было считать точки ее поверхности взаимно неподвижными, принимают ее за базовую, для нее определяют параметры взаимного расположения маркеров в собственной системе координат и собственные параметры внешнего ориентирования центральной проекции базовой зоны, при формировании собственной математической параметрической модели базовой зоны учитывают параметры взаимного расположения маркеров в ней, а при обработке изображений собственные параметры всех других собственных математических моделей вычисляют с использованием собственных параметров внешнего ориентирования центральной проекции базовой зоны и искомые геометрические параметры объекта находят в системе координат базовой зоны.
3. Способ по п.1 или 2, отличающийся тем, что на основе заранее известных геометрических закономерностей исследуемого объекта обособленные зоны выделяют или создают дополнительно в виде сечений так, чтобы в каждой из них можно было считать точки поверхности взаимно неподвижными и перемещающимися как целое, при формировании собственных математических параметрических моделей сечений определяют параметры взаимного расположения маркеров в их собственных системах координат, собственные математические параметрические модели формируют в виде уравнений положения и движения указанных собственных систем координат сечений, а при обработке изображений определяют собственные параметры внешнего ориентирования центральной проекции сечений и искомые геометрические параметры объекта находят из значений собственных параметров внешнего ориентирования каждого сечения.
4. Устройство бесконтактных измерений геометрических параметров объекта в пространстве, содержащее средство нанесения маркеров на поверхность исследуемого объекта, устройство регистрации центральной проекции маркеров в виде изображения, средство определения параметров внешнего ориентирования устройства регистрации центральной проекции, блок измерения координат проекций маркеров на изображении и блок вычисления искомых геометрических параметров объекта, отличающееся тем, что в него дополнительно введены средство создания обособленных групп маркеров, связанное со средством нанесения маркеров на поверхность исследуемого объекта, средство определения параметров взаимного расположения маркеров в обособленной группе, средство формирования математических параметрических моделей для обособленных групп маркеров, информационно связанное со средством создания обособленных групп маркеров и средством определения параметров взаимного расположения маркеров, блок выделения обособленных групп проекций маркеров на изображении, подключенный к блоку измерения координат проекций маркеров на изображении, и блок многомерной минимизации расхождений для каждой обособленной группы маркеров, подключенный своим входом к блоку выделения обособленных групп проекций маркеров и информационно связанный со средством формирования математических параметрических моделей и средством определения параметров внешнего ориентирования, а выходом - с блоком вычисления искомых геометрических параметров объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК И ОРИЕНТАЦИИ УЧАСТКОВ ПОВЕРХНОСТИ ТЕЛА СЛОЖНОЙ ФОРМЫ | 1999 |
|
RU2162591C1 |
| Способ измерения формы и положения объекта | 1979 |
|
SU1105756A1 |
| JP2001264027 A 26.09.2001 | |||
| US 7154613 B2 26.12.2006 | |||
| US 0007656445 B2 02.02.2010 | |||

