Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству подвески. В частности, изобретение относится к устройству подвески, включающему в себя электромагнитный амортизатор, который предоставляется смежно с пружиной подвески и преобразует кинетическую энергию, которая формируется посредством движения приближения-отдаления между верхним участком пружины и нижним участком пружины, например, в электроэнергию.
2. Описание предшествующего уровня техники
[0002] В последние годы, в качестве устройства подвески для транспортного средства, изучается устройство электромагнитной подвески, включающее в себя электромагнитный амортизатор, который использует электромагнитный мотор для того, чтобы формировать рекуперативную мощность, и ослабляет силу в направлении, в котором верхний участок пружины и нижний участок пружины приближаются или отдаляются друг от друга за счет работы в рекуперативном режиме. Один пример устройства подвески, включающего в себя такой электромагнитный амортизатор, раскрыт в публикации заявки на патент (Япония) номер 2010-228579 (JP 2010-228579 А).
[0003] Система подвески, описанная в JP 2010-228579 А, включает в себя: несколько электромагнитных амортизаторов, которые, соответственно, предоставляются для нескольких колес и каждый из которых имеет электромагнитный мотор и, в зависимости от силы, сформированной посредством электромагнитного мотора, формирует силу в направлении, в котором верхний участок пружины и нижний участок пружины приближаются или отдаляются друг от друга; несколько контактных реле, которые, соответственно, предоставляются для нескольких амортизаторов и каждое из которых переключается между соединенным состоянием и состоянием отсечки, причем соединенное состояние представляет собой состояние, в котором источник питания и электромагнитный мотор, предоставленный в одном, соответствующем магнитному сердечнику, из нескольких амортизаторов, соединяются, и электрический ток между ними разрешается, и состояние отсечки представляет собой состояние, в котором источник питания и электромагнитный мотор отсоединяются, и электрический ток между электромагнитным мотором и источником питания в силу этого предотвращается; и релейный контроллер, который управляет каждым из реле таким образом, чтобы избирательно реализовывать соединенное состояние и состояние отсечки каждого из амортизаторов, причем релейный контроллер выполнен с возможностью нормально реализовывать соединенные состояния всех амортизаторов и реализовывать состояние отсечки одного из амортизаторов в ситуации, в которой сформированный ток посредством электромагнитного мотора, предоставленного в одном из амортизаторов, прогнозируется как превышающий заданный ток, который задается с учетом возникновения явления приваривания реле.
Сущность изобретения
[0004] Тем не менее, вследствие характеристики электромотора, в электромагнитном амортизаторе, демпфирующая сила может насыщаться в диапазоне скоростей, в котором скорость хода подвижного вала, обуславливающая работу подвижного вала амортизатора, становится равной или превышающей заданную скорость.
[0005] Изобретение предоставляет устройство подвески, допускающее увеличение демпфирующей силы в диапазоне скоростей, в котором демпфирующая сила насыщается вследствие характеристики электромотора.
[0006] Устройство подвески согласно одному аспекту изобретения включает в себя: пружину, предоставленную между верхним элементом и нижним элементом; электромотор, предоставленный смежно с пружиной, причем электромотор выполнен с возможностью формировать мощность в соответствии со скоростью, на которой работает подвижный вал, причем подвижный вал является подвижным в соответствии с действиями верхнего элемента и нижнего элемента в направлении расширения-сжатия пружины; схему потребления мощности, включающую в себя схему регулирования нагрузки, причем схема регулирования нагрузки выполнена с возможностью формировать демпфирующую силу в электромоторе посредством потребления энергии, сформированной в электромоторе, и изменять демпфирующую силу; и секцию управления нагрузкой, выполненную с возможностью управлять схемой регулирования нагрузки таким образом, что потребляемая мощность посредством схемы регулирования нагрузки увеличивается вместе с увеличением скорости подвижного вала.
[0007] Согласно вышеприведенному аспекту, значение сопротивления переменного резистора в схеме потребления мощности увеличивается вместе с увеличением рабочей скорости электромотора. Как результат, потребляемая мощность в схеме потребления мощности увеличивается. Таким образом, уменьшение демпфирующей силы может подавляться в диапазоне скоростей, в котором демпфирующая сила насыщается вследствие характеристики электромотора.
[0008] В вышеприведенном аспекте, секция управления нагрузкой может быть выполнена с возможностью поддерживать значение сопротивления схемы регулирования нагрузки равным указанному значению, когда скорость подвижного вала равна или меньше заданной скорости.
[0009] Согласно вышеуказанной конфигурации, когда скорость подвижного вала электромотора равна или меньше заданной скорости, значение сопротивления переменного резистора задается равным фиксированному значению сопротивления, при котором разность между демпфирующей силой и опорной демпфирующей силой, служащей в качестве опорного уровня демпфирующей силы, попадает в определенный диапазон. Следует отметить, что когда скорость подвижного вала электромотора равна или выше заданной скорости, демпфирующая сила, которая насыщается с фиксированным значением сопротивления, компенсируется посредством изменения значения сопротивления переменного резистора. Таким образом, характеристика устройства подвески может приближаться к идеальному состоянию.
[0010] В вышеприведенном аспекте, секция управления нагрузкой может иметь таблицу преобразования, которая указывает взаимосвязь между скоростью подвижного вала и значением сопротивления схемы регулирования нагрузки, и секция управления нагрузкой выполнена с возможностью выводить сигнал задания значений нагрузочного сопротивления на основе таблицы преобразования, причем сигнал задания значений нагрузочного сопротивления используется для того, чтобы задавать значение сопротивления схемы регулирования нагрузки равным значению, соответствующему скорости подвижного вала.
[0011] Согласно вышеуказанной конфигурации, значение сигнала задания значений нагрузочного сопротивления может определяться на высокой скорости.
[0012] В вышеприведенном аспекте, схема регулирования нагрузки может иметь: нагрузочный резистор, который имеет предварительно определенное значение сопротивления; и переключатель, последовательно соединенный с нагрузочным резистором, и секция управления нагрузкой может иметь секцию формирования управляющих сигналов, которая выполнена с возможностью формировать сигнал широтно-импульсной модуляции таким образом, что скважность импульсов уменьшается по мере того, как значение сопротивления схемы регулирования нагрузки увеличивается, причем сигнал широтно-импульсной модуляции используется для того, чтобы переключать разомкнутое-замкнутое состояние переключателя.
[0013] Согласно вышеуказанной конфигурации, значение сопротивления на временной оси может изменяться. Таким образом, размер схемы может уменьшаться, и скорость отклика на изменение значения сопротивления может увеличиваться.
[0014] В вышеприведенном аспекте, секция управления нагрузкой может быть выполнена с возможностью переключать режим работы между первым рабочим режимом и вторым рабочим режимом в соответствии с сигналом переключения режима, предоставленным снаружи. Секция управления нагрузкой может быть выполнена с возможностью в первом рабочем режиме - управлять значением сопротивления схемы регулирования нагрузки таким образом, что значение сопротивления схемы регулирования нагрузки увеличивается вместе с увеличением скорости подвижного вала, и во втором рабочем режиме - управлять значением сопротивления схемы регулирования нагрузки таким образом, что демпфирующая сила в схеме регулирования нагрузки становится наибольшей для скорости подвижного вала.
[0015] Согласно вышеуказанной конфигурации, может добавляться рабочий режим, в котором максимизируется рекуперативная величина мощности, формируемой посредством электромотора.
[0016] В вышеприведенном аспекте, секция управления нагрузкой может иметь: первую таблицу преобразования, которая указывает взаимосвязь между скоростью подвижного вала и значением сопротивления схемы регулирования нагрузки, причем первая таблица преобразования предоставляется для первого рабочего режима; вторую таблицу преобразования, которая указывает взаимосвязь между скоростью подвижного вала и значением сопротивления схемы регулирования нагрузки, причем вторая таблица преобразования предоставляется для второго рабочего режима; и секцию формирования управляющих сигналов, которая выполнена с возможностью считывать заданное значение скважности импульсов, используемое для того, чтобы реализовывать скорость подвижного вала и значение сопротивления схемы регулирования нагрузки, из любой из первой таблицы преобразования и второй таблицы преобразования в соответствии с сигналом переключения режима и формировать сигнал широтно-импульсной модуляции со скважностью импульсов, которая соответствует считанному заданному значению скважности импульсов.
[0017] Согласно вышеуказанной конфигурации, значение сигнала задания значений нагрузочного сопротивления может определяться на высокой скорости.
[0018] В вышеприведенном аспекте, секция управления нагрузкой может иметь секцию формирования управляющих сигналов, выполненную с возможностью формировать сигнал задания значений нагрузочного сопротивления, включающий в себя скважность импульсов, которая соответствует скорости подвижного вала, и схема регулирования нагрузки может включать в себя: повышающе-понижающую схему, которая выполнена с возможностью повышать или понижать напряжение электромотора, сформированное в электромоторе, на основе сигнала задания значений нагрузочного сопротивления, чтобы формировать выходное напряжение со значением постоянного напряжения; и аккумуляторную батарею, к которой прикладывается выходное напряжение и в которой накапливается рекуперативная мощность, сформированная в электромоторе.
[0019] Согласно вышеуказанной конфигурации, мощность, формируемая посредством электромотора, может быть рекуперирована в аккумуляторную батарею.
[0020] В вышеприведенном аспекте, скважность импульсов для сигнала задания значений нагрузочного сопротивления может задаваться таким образом, что демпфирующая сила, сформированная посредством схемы регулирования нагрузки посредством потребления энергии, сформированной в электромоторе, становится целевой демпфирующей силой.
[0021] Согласно вышеуказанной конфигурации, в то время как мощность, формируемая в электромоторе, рекуперирована в аккумуляторную батарею, характеристика демпфирующей силы устройства подвески может реализовывать целевую демпфирующую силу.
[0022] Устройство подвески согласно изобретению может увеличивать демпфирующую силу в диапазоне скоростей, в котором демпфирующая сила насыщается вследствие характеристики электромотора.
Краткое описание чертежей
[0023] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, которая иллюстрирует конфигурацию устройства подвески согласно первому варианту осуществления;
Фиг. 2 является блок-схемой конфигураций секции управления значениями сопротивления и переменного резистора согласно первому варианту осуществления;
Фиг. 3 является графиком, который иллюстрирует демпфирующую силу амортизатора в случае, если значение сопротивления изменяется в устройстве подвески согласно первому варианту осуществления;
Фиг. 4 является графиком, который иллюстрирует характеристику демпфирования амортизатора согласно первому варианту осуществления;
Фиг. 5 является блок-схемой конфигурации устройства подвески согласно второму варианту осуществления;
Фиг. 6 является блок-схемой конфигураций секции управления значениями сопротивления и переменного резистора согласно второму варианту осуществления;
Фиг. 7 является графиком, который иллюстрирует характеристику демпфирования амортизатора согласно второму варианту осуществления;
Фиг. 8 является блок-схемой конфигурации устройства подвески согласно третьему варианту осуществления;
Фиг. 9 является принципиальной схемой повышающе-понижающей схемы устройства подвески согласно третьему варианту осуществления;
Фиг. 10 является графиком, который иллюстрирует характеристику демпфирования амортизатора согласно третьему варианту осуществления; и
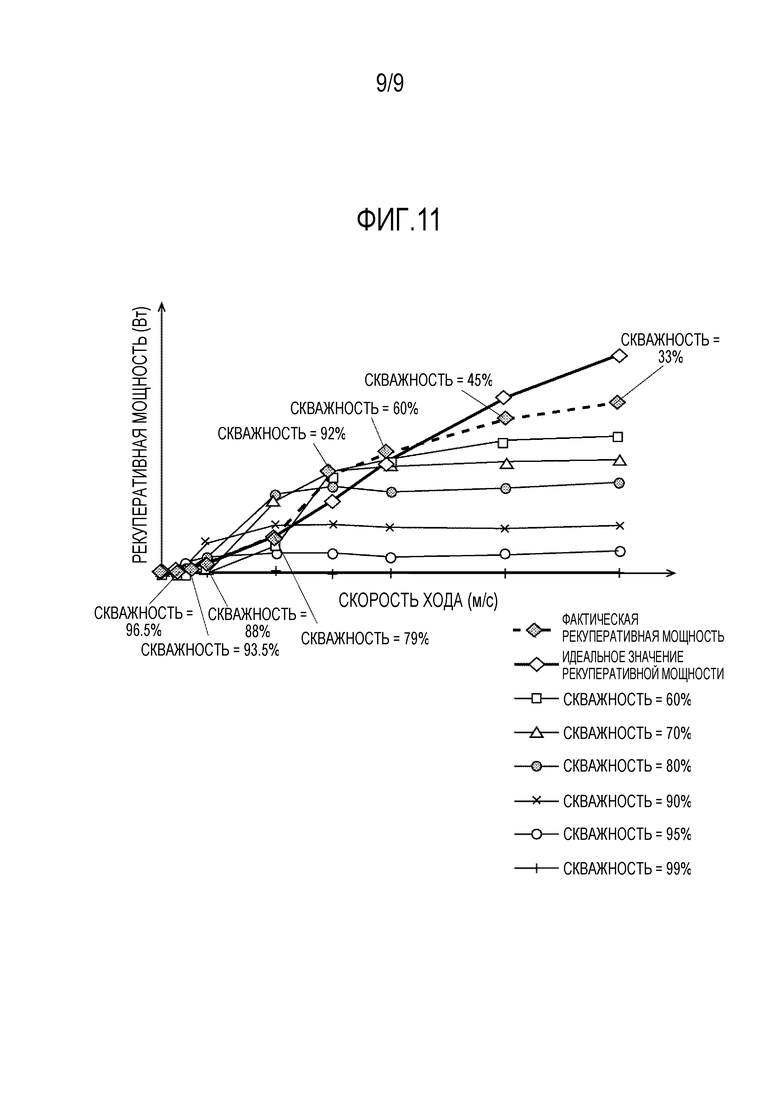
Фиг. 11 является графиком, который иллюстрирует рекуперативную мощность амортизатора согласно третьему варианту осуществления.
Подробное описание вариантов осуществления
[0024] Далее приводится описание вариантов осуществления изобретения со ссылкой на чертежи. Для прояснения описания, нижеприведенное описание и чертежи надлежащим образом опускаются или упрощаются. На каждом из чертежей, идентичный элемент обозначается посредством идентичной ссылки с номером, и их перекрывающееся описание не приводится при необходимости.
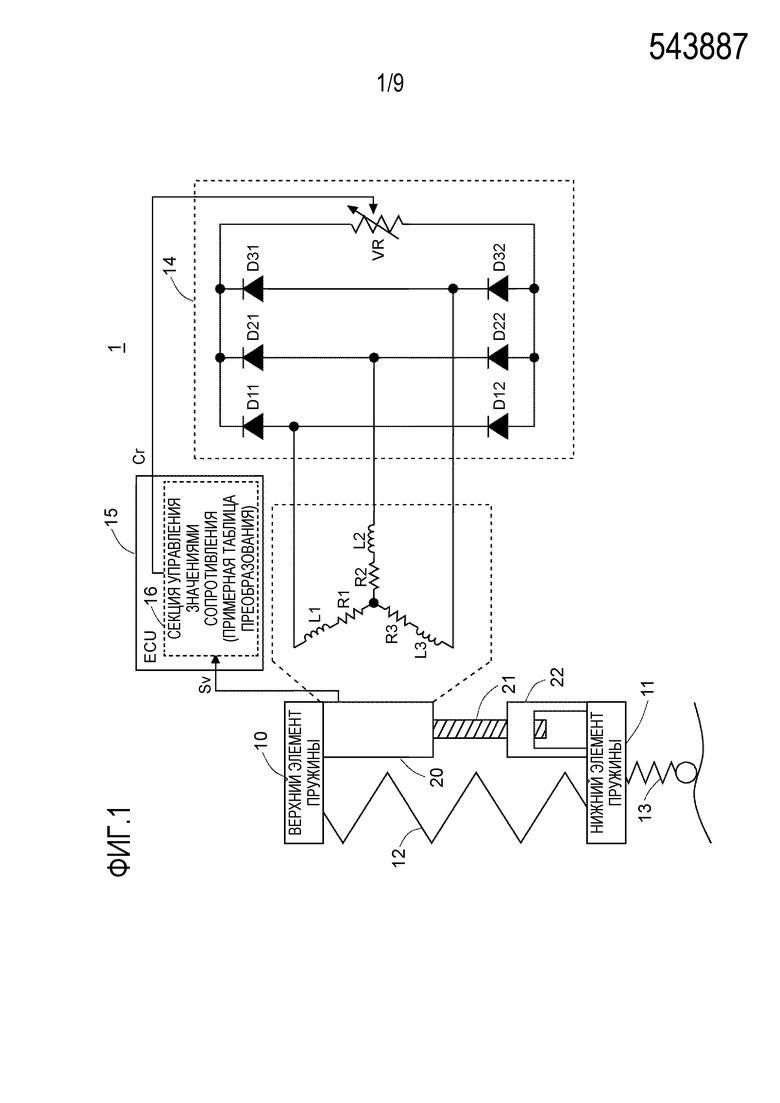
[0025] Во-первых, приводится описание конфигурации устройства 1 подвески согласно первому варианту осуществления. Фиг. 1 является блок-схемой, которая иллюстрирует конфигурацию устройства 1 подвески согласно первому варианту осуществления.
[0026] Как показано на фиг. 1, устройство 1 подвески согласно первому варианту осуществления имеет верхний элемент (например, верхний элемент 10 пружины), нижний элемент (например, нижний элемент 11 пружины), пружину 12, шину 13, электромотор 20, шариковый винт 21, опорный элемент 22 винта, схему 14 потребления мощности и электронную схему 15 управления. В устройстве 1 подвески согласно первому варианту осуществления, электромотор 20, шариковый винт 21 и опорный элемент 22 винта составляют электромагнитный амортизатор.
[0027] Верхний элемент 10 пружины соединяется, например, с кузовом транспортного средства. Нижний элемент 11 пружины присоединяется к рычагу подвески, который присоединяется к транспортному средству, например, и принимает силу из шины 13. На фиг. 1, шина 13 показана как модель, которая сконфигурирована посредством включения пружины и ролика. Пружина 12 предоставляется таким образом, что она удерживается между верхним элементом 10 пружины и нижним элементом 11 пружины.
[0028] Электромотор 20 предоставляется смежно с пружиной 12 и формирует мощность в соответствии с рабочей скоростью подвижного вала (в дальнейшем также называемой "скоростью хода"), который работает в соответствии с действиями верхнего элемента 10 пружины и нижнего элемента 11 пружины в направлении расширения-сжатия пружины 12. Электромотор 20 формирует ток в соответствии с движением подвижного вала и за счет этого формирует демпфирующую силу. Шариковый винт 21 и опорный элемент 22 винта составляют механизм преобразования действия. Этот механизм преобразования действия располагается последовательно с электромотором 20 между верхним элементом 10 пружины и нижним элементом 11 пружины. Механизм преобразования действия преобразует действие приближения-отдаления между верхним элементом 10 пружины и нижним элементом 11 пружины в движение подвижного вала электромотора 20. В электромагнитном амортизаторе согласно первому варианту осуществления, когда верхний элемент 10 пружины и нижний элемент 11 пружины выполняют действие приближения-отдаления, опорный элемент 22 винта вызывает вращение шарикового винта 21 в соответствии с упомянутым действием приближения-отдаления, и подвижный вал электромотора 20, который соединяется с шариковым винтом 21, вращается в ортогональном направлении относительно направления приближения-отдаления.
[0029] Фиг. 1 также показывает модель схемы электромотора 20. Электромотор 20 представляет собой, например, трехфазный электромотор, и может быть проиллюстрирован в качестве модели, которая имеет катушки L1-L3 и резисторы R1-R3, один конец которых, соответственно, соединяется с одним концом катушек L1-L3, при этом другие концы резисторов R1-R3 соединяются, и при этом сформированный ток выводится из каждого из других концов катушек L1-L3.
[0030] Схема 14 потребления мощности преобразует сформированный ток, выводимый из электромотора 20, в тепло. Таким образом, схема 14 потребления мощности преобразует электроэнергию, сформированную посредством работы в рекуперативном режиме электромотора 20, в тепловую энергию. Помимо этого, схема 14 потребления мощности потребляет энергию, сформированную в электромоторе 20, и за счет этого изменяет демпфирующую силу, сформированную в электромоторе 20. Схема 14 потребления мощности имеет диоды D11, D12, D21, D22, D31, D32 и схему регулирования нагрузки (например, переменный резистор VR).
[0031] Диод D11 и диод D12 соединяются последовательно между обоими концами переменного резистора VR. Другой конец катушки L1 соединяется с точкой соединения, в которой соединяются анод диода D11 и катод диода D12. Диод D21 и диод D22 соединяются последовательно между обоими из концов переменного резистора VR. Другой конец катушки L2 соединяется с точкой соединения, в которой соединяются анод диода D21 и катод диода D22. Диод D31 и диод D32 соединяются последовательно между обоими из концов переменного резистора VR. Другой конец катушки L3 соединяется с точкой соединения, в которой соединяются анод диода D31 и катод диода D32.
[0032] Электронная схема 15 управления представляет собой интегральную схему, такую как модуль микроконтроллера (MCU), и включает в себя: арифметическую схему, допускающую выполнение программы; и периферийную схему, имеющую различные функции и используемую посредством арифметической схемы. В примере, показанном на фиг. 1, электронная схема 15 управления включает в себя секцию управления нагрузкой (например, секцию 16 управления значениями сопротивления). Секция 16 управления значениями сопротивления управляет переменным резистором VR таким образом, что значение сопротивления переменного резистора VR увеличивается по мере того, как скорость перемещения подвижного вала электромотора 20 увеличивается. Секция 16 управления значениями сопротивления принимает измеренное значение Sv скорости хода и выводит сигнал Cr задания значений нагрузочного сопротивления, используемый для того, чтобы задавать значение сопротивления переменного резистора VR равным значению сопротивления, которое соответствует скорости хода подвижного вала, указываемой посредством упомянутого измеренного значения Sv скорости хода.
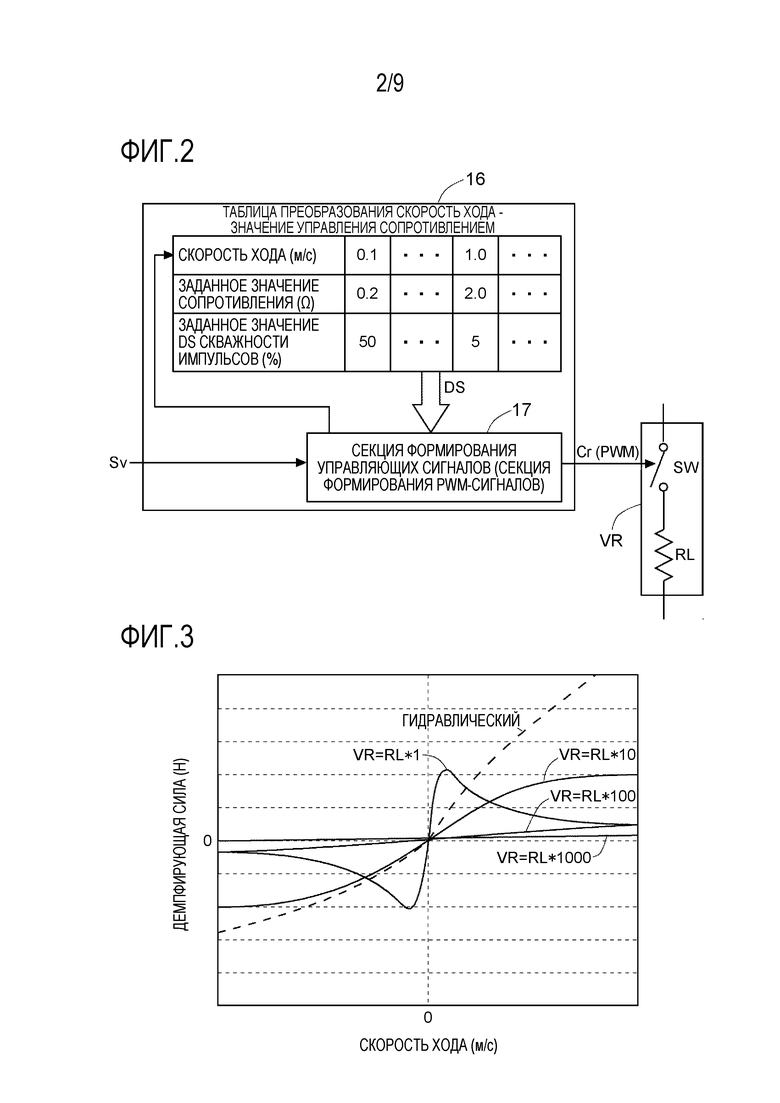
[0033] Здесь, приводится подробное описание секции 16 управления значениями сопротивления и переменном резисторе VR. Фиг. 2 является блок-схемой, которая иллюстрирует конфигурации секции 16 управления значениями сопротивления и переменного резистора VR согласно первому варианту осуществления.
[0034] Как показано на фиг. 2, секция 16 управления значениями сопротивления имеет таблицу преобразования (например, таблицу преобразования скорость хода - значение управления сопротивлением) и секцию 17 формирования управляющих сигналов. Таблица преобразования скорость хода - значение управления сопротивлением показывает взаимосвязь между скоростью подвижного вала электромотора 20 и значением сопротивления переменного резистора. Помимо этого, в таблице преобразования скорость хода - значение управления сопротивлением, заданное значение скважности импульсов для сигнала широтно-импульсной модуляции (PWM) описывается как значение управления сопротивлением для реализации значения сопротивления переменного резистора VR, которое соответствует скорости подвижного вала электромотора 20.
[0035] Секция 17 формирования управляющих сигналов обращается к таблице преобразования посредством использования измеренного значения Sv скорости хода, полученного из электромотора 20, и выводит сигнал задания значений нагрузочного сопротивления (например, PWM-сигнал), используемый для того, чтобы задавать значение сопротивления переменного резистора равным значению, соответствующему скорости перемещения подвижного вала электромотора 20. Более конкретно, секция 17 формирования управляющих сигналов считывает заданное значение DS скважности импульсов, которое соответствует измеренному значению Sv скорости хода, полученному из электромотора 20, и изменяет скважность импульсов выходного PWM-сигнала.
[0036] Помимо этого, как показано на фиг. 2, переменный резистор VR имеет нагрузочный резистор RL и переключатель SW. Переключатель SW соединяется последовательно с нагрузочным резистором RL. Нагрузочный резистор RL представляет собой резистор, значение сопротивления которого определяется заранее.
[0037] В устройстве 1 подвески согласно первому варианту осуществления, разомкнутое-замкнутое состояния переключателя SW переменного резистора VR переключаются посредством PWM-сигнала, выводимого посредством секции 17 формирования управляющих сигналов. Таким образом, значение сопротивления переменного резистора VR изменяется на временной оси. Таким образом, нагрузочный резистор RL активируется, когда переключатель SW находится в замкнутом состоянии, и нагрузочный резистор RL деактивируется, когда переключатель SW находится в разомкнутом состоянии. Соответственно, устройство 1 подвески согласно первому варианту осуществления изменяет значение сопротивления переменного резистора VR посредством изменения периода, в который нагрузочный резистор RL активируется посредством PWM-сигнала. Более конкретно, когда скважность импульсов PWM-сигнала составляет 50%, значение сопротивления переменного резистора VR становится значением сопротивления, которое в два раза превышает значение сопротивления нагрузочного резистора RL. Когда скважность импульсов PWM-сигнала составляет 5%, значение сопротивления переменного резистора VR становится значением сопротивления, которое в 20 раз превышает значение сопротивления нагрузочного резистора RL. Когда скважность импульсов PWM-сигнала составляет 100%, значение сопротивления переменного резистора VR становится значением сопротивления, которое равно значению сопротивления нагрузочного резистора RL.
[0038] В устройстве 1 подвески согласно первому варианту осуществления, секция 16 управления значениями сопротивления формирует PWM-сигнал таким образом, что скважность импульсов уменьшается по мере того, как значение сопротивления переменного резистора VR увеличивается.
[0039] Далее приводится описание взаимосвязи между значением сопротивления переменного резистора VR и демпфирующей силой, сформированной в электромоторе 20. Фиг. 3 является графиком, который иллюстрирует демпфирующую силу амортизатора в случае, если значение сопротивления изменяется в устройстве 1 подвески согласно первому варианту осуществления. Следует отметить, что фиг. 3 показывает демпфирующую силу гидравлического амортизатора в качестве идеального значения демпфирующей силы, сформированной в электромоторе 20. Как показано на фиг. 3, в диапазоне скоростей хода подвижного вала электромотора 20, который предполагается в устройстве 1 подвески, демпфирующая сила гидравлического амортизатора имеет характеристику простого увеличения. С другой стороны, когда электромотор 20 используется в качестве амортизатора, пиковое значение демпфирующей силы отличается посредством абсолютной величины значения сопротивления переменного резистора VR. Более конкретно, когда электромотор 20 используется в качестве амортизатора, скорость хода, при которой демпфирующая сила становится наибольшей, увеличивается по мере того, как значение сопротивления переменного резистора VR увеличивается.
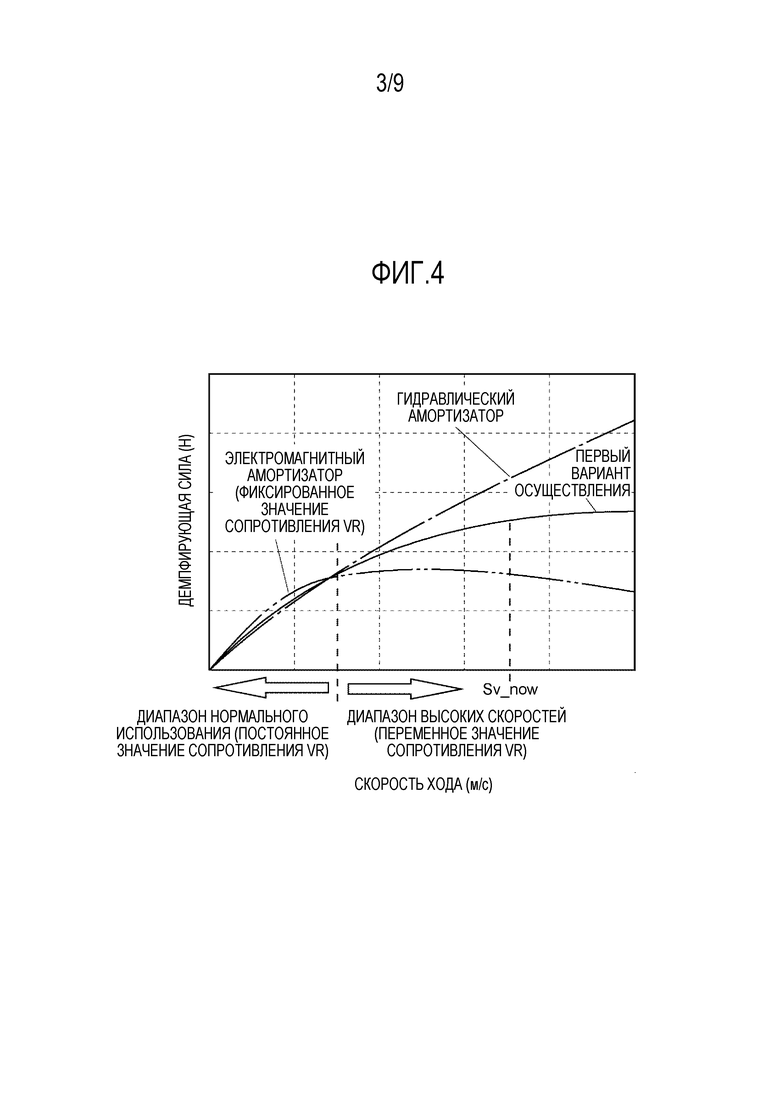
[0040] Затем, фиг. 4 является графиком, который иллюстрирует характеристику демпфирования амортизатора устройства 1 подвески согласно первому варианту осуществления. Как показано на фиг. 4, в устройстве 1 подвески согласно первому варианту осуществления, в области, в которой скорость подвижного вала электромотора 20 равна или меньше определенной скорости (например, в диапазоне нормального использования, в которой частота использования является высокой в качестве рабочей ситуации устройства 1 подвески) в качестве рабочей ситуации устройства 1 подвески, значение сопротивления переменного резистора VR задается фиксированно равным определенному значению. Таким образом, в устройстве 1 подвески согласно первому варианту осуществления, улучшаются ходовые качества для пользователя транспортного средства.
[0041] Между тем, в устройстве 1 подвески согласно первому варианту осуществления, в области, в которой скорость подвижного вала электромотора 20 выше определенной скорости в качестве рабочей ситуации устройства 1 подвески (например, в диапазоне высоких скоростей, в которой скорость действия отдаления между верхним элементом 10 пружины и нижним элементом 11 пружины является высокой, тогда как частота использования является низкой в качестве рабочей ситуации устройства 1 подвески), значение сопротивления переменного резистора VR изменяется, чтобы реализовывать наибольшую демпфирующую силу. Таким образом, устройство 1 подвески согласно первому варианту осуществления может уменьшать ширину, при которой демпфирующая сила насыщается, и характеристика демпфирующей силы отклоняется от характеристики демпфирующей силы гидравлического амортизатора, когда значение сопротивления переменного резистора VR является фиксированным.
[0042] Из вышеприведенного описания, в устройстве 1 подвески согласно первому варианту осуществления, секция 16 управления значениями сопротивления управляет переменным резистором VR таким образом, что значение сопротивления переменного резистора VR увеличивается в соответствии с абсолютной величиной скорости подвижного вала электромотора 20. Таким образом, насыщенное состояние демпфирующей силы электромотора 20, которое вызывается посредством переменного резистора VR, может не допускаться, и демпфирующая сила электромотора 20 может увеличиваться таким образом, что она попадает в область, в которой скорость подвижного вала электромотора 20 является высокой.
[0043] В устройстве 1 подвески согласно первому варианту осуществления, когда скорость подвижного вала электромотора 20 равна или меньше определенной скорости, значение сопротивления переменного резистора поддерживается постоянным. Таким образом, в устройстве 1 подвески согласно первому варианту осуществления, характеристика демпфирования амортизатора может приближаться к идеальной характеристике демпфирования гидравлического амортизатора.
[0044] В устройстве 1 подвески согласно первому варианту осуществления, когда значение сопротивления переменного резистора VR управляется в соответствии со скоростью подвижного вала электромотора 20, скважность импульсов для сигнала Cr задания значений нагрузочного сопротивления, который управляет значением сопротивления переменного резистора VR, определяется посредством обращения к таблице преобразования. Таким образом, в устройстве 1 подвески согласно первому варианту осуществления, скважность импульсов для сигнала Cr задания значений нагрузочного сопротивления может изменяться на высокой скорости. В частности, поскольку скорость перемещения подвижного вала электромотора 20 время от времени изменяется в устройстве подвески, предпочтительно изменять скважность импульсов на высокой скорости. Таким образом, демпфирующая сила может поддерживаться в состоянии высокого уровня посредством изменения скважности импульсов на высокой скорости.
[0045] В устройстве 1 подвески согласно первому варианту осуществления, значение сопротивления переменного резистора VR изменяется на основе отношения пребывания в разомкнутом-замкнутом состоянии переключателя SW, который предоставляется последовательно с нагрузочным резистором RL. Таким образом, в устройстве 1 подвески согласно первому варианту осуществления, размер схемы в разомкнутом состоянии, который реализует переменный резистор VR, может уменьшаться, и может повышаться скорость переключения значения сопротивления.
[0046] Второй вариант осуществления
Во втором варианте осуществления, приводится описание устройства 2 подвески в качестве другого варианта осуществления устройства 1 подвески. Следует отметить, что в описании устройства 2 подвески согласно второму варианту осуществления, компоненты, которые описаны в первом варианте осуществления, обозначаются посредством ссылок с номерами, идентичных ссылкам с номерами в первом варианте осуществления, и их описание не приводится.
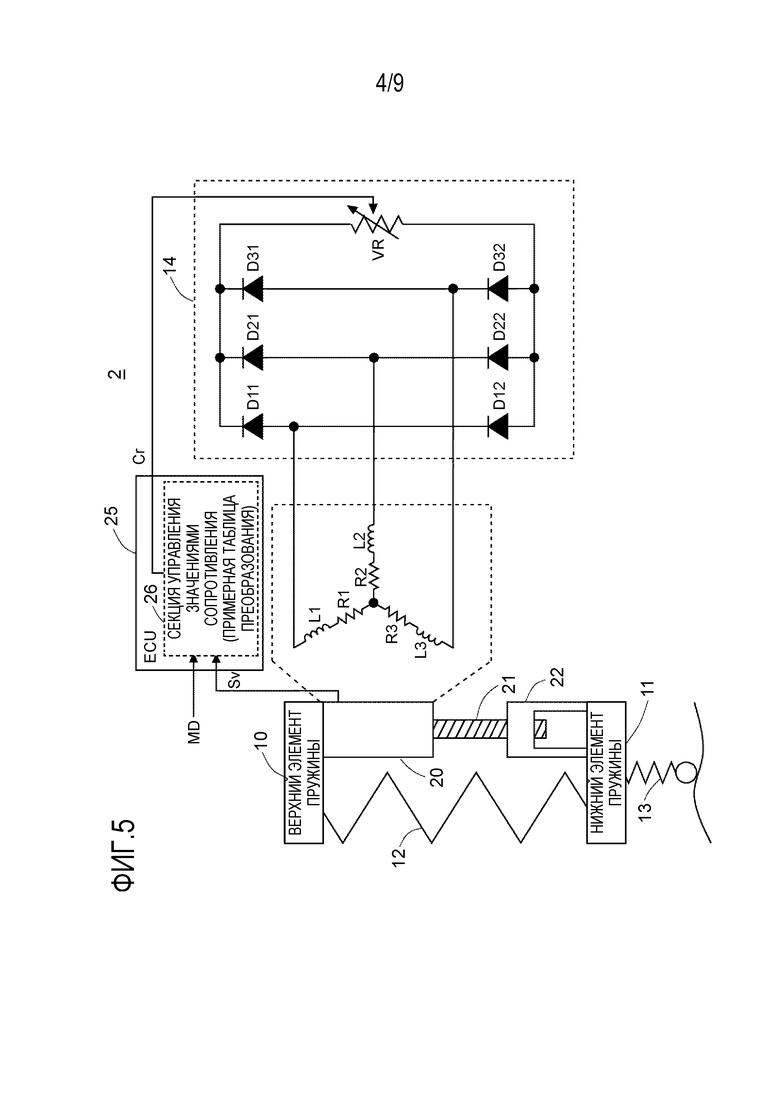
[0047] Фиг. 5 является блок-схемой конфигурации устройства подвески согласно второму варианту осуществления. Как показано на фиг. 5, в устройстве 2 подвески согласно второму варианту осуществления, электронная схема 15 управления устройства 1 подвески согласно первому варианту осуществления изменяется на электронную схему 25 управления. Электронная схема 25 управления имеет секцию управления нагрузкой (например, секцию 26 управления значениями сопротивления). Секция 26 управления значениями сопротивления переключает рабочий режим между первым рабочим режимом и вторым рабочим режимом в соответствии с сигналом MD переключения режима, принимаемым снаружи. В первом рабочем режиме, секция 26 управления значениями сопротивления управляет значением сопротивления переменного резистора VR таким образом, что значение сопротивления переменного резистора VR увеличивается по мере того, как скорость подвижного вала электромотора 20 увеличивается. Во втором рабочем режиме, секция 26 управления значениями сопротивления управляет значением сопротивления переменного резистора VR таким образом, что демпфирующая сила в переменном резисторе VR становится наибольшей для скорости подвижного вала электромотора 20.
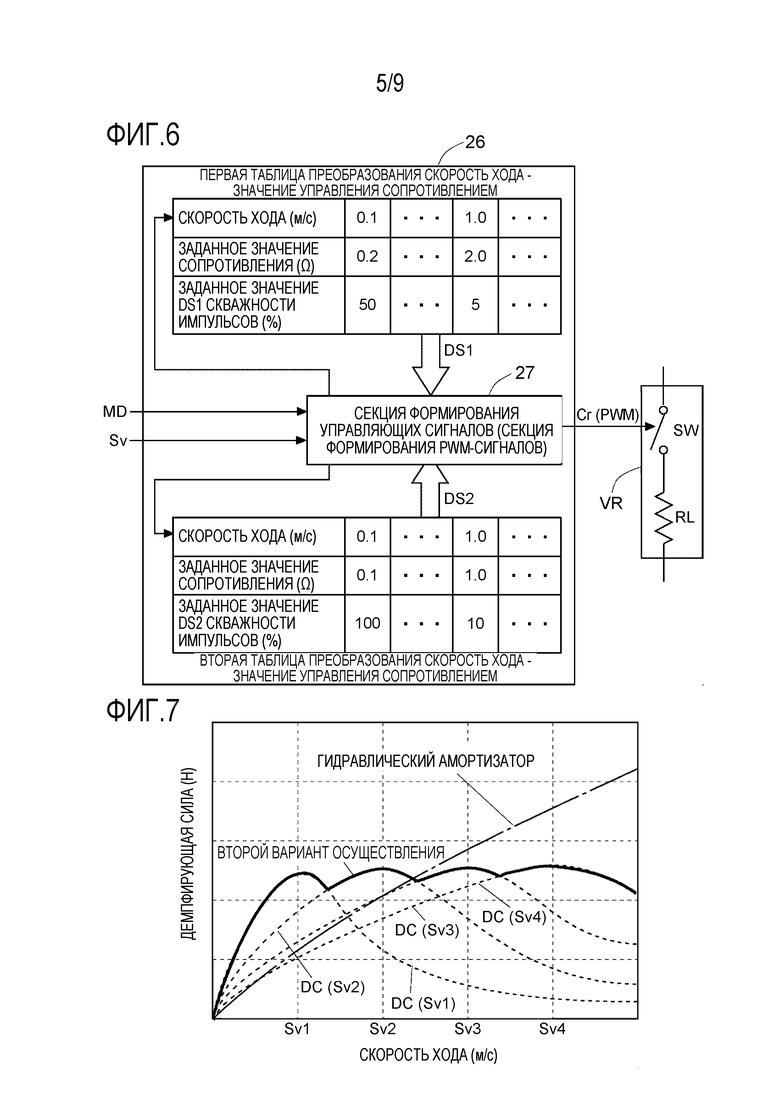
[0048] Здесь, приводится подробное описание секции 26 управления значениями сопротивления. Фиг. 6 является блок-схемой конфигураций секции 26 управления значениями сопротивления и переменного резистора VR согласно второму варианту осуществления. Как показано на фиг. 6, секция 26 управления значениями сопротивления имеет первую таблицу преобразования (например, первую таблицу преобразования скорость хода - значение управления сопротивлением), вторую таблицу преобразования (например, вторую таблицу преобразования скорость хода - значение управления сопротивлением) и секцию 27 формирования управляющих сигналов.
[0049] Первая таблица преобразования скорость хода - значение управления сопротивлением является идентичной таблице преобразования скорость хода - значение управления сопротивлением в первом варианте осуществления. Более конкретно, первая таблица преобразования скорость хода - значение управления сопротивлением предоставляется для первого рабочего режима и показывает взаимосвязь между скоростью подвижного вала электромотора 20 и значением сопротивления переменного резистора VR. Вторая таблица преобразования скорость хода - значение управления сопротивлением предоставляется для второго рабочего режима и показывает взаимосвязь между скоростью подвижного вала электромотора 20 и значением сопротивления переменного резистора VR.
[0050] Более конкретно, в первой таблице преобразования скорость хода - значение управления сопротивлением, описывается взаимосвязь между такой скоростью, что значение сопротивления переменного резистора VR увеличивается вместе с увеличением скорости подвижного вала, и заданным значением DS1 скважности импульсов в области, в которой скорость подвижного вала электромотора 20 равна или выше определенной скорости. Между тем, во второй таблице преобразования скорость хода - значение управления сопротивлением, описывается такая взаимосвязь между скоростью подвижного вала и заданным значением DS2 скважности импульсов, что демпфирующая сила, сформированная в электромоторе 20, становится наибольшей для скорости подвижного вала независимо от скорости подвижного вала электромотора 20.
[0051] Секция 27 формирования управляющих сигналов считывает заданное значение скважности импульсов для реализации скорости подвижного вала и значение сопротивления переменного резистора VR из любой из первой таблицы преобразования скорость хода - значение управления сопротивлением и второй таблицы преобразования скорость хода - значение управления сопротивлением в соответствии с сигналом MD переключения режима и формирует PWM-сигнал, который имеет скважность импульсов, соответствующую считанному заданному значению скважности импульсов.
[0052] Далее приводится описание характеристики демпфирования амортизатора в устройстве 2 подвески согласно второму варианту осуществления. Фиг. 7 является графиком, который иллюстрирует характеристику демпфирования амортизатора согласно второму варианту осуществления. В примере, показанном на фиг. 7, Sv1-Sv4 показаны как скорости хода, при каждой из которых значение сопротивления переменного резистора VR изменяется. Как показано на фиг. 7, в устройстве 2 подвески согласно второму варианту осуществления, значение сопротивления переменного резистора VR изменяется, чтобы реализовывать наибольшую демпфирующую силу для каждой из скоростей подвижного вала электромотора 20 (например, скоростей Sv1-Sv4 хода). Помимо этого, в устройстве 2 подвески согласно второму варианту осуществления, распределение по времени переключения значения сопротивления переменного резистора VR соответствует скорости хода, при которой кривые DC демпфирующей силы, соответствующие скоростям хода, пересекают друг друга. Таким образом, устройство 2 подвески согласно второму варианту осуществления имеет такую характеристику, что демпфирующая сила амортизатора изменяется вдоль выступа кривой DC демпфирующей силы, которая отличается посредством значения сопротивления переменного резистора VR.
[0053] Из вышеприведенного описания, в устройстве 2 подвески согласно второму варианту осуществления, значение сопротивления переменного резистора VR изменяется, чтобы реализовывать наибольшую демпфирующую силу независимо от скорости подвижного вала электромотора 20. Таким образом, в устройстве 2 подвески согласно второму варианту осуществления, рекуперативная мощность, сформированная в электромоторе 20, может наиболее эффективно восстанавливаться. Следует отметить, что для того, чтобы восстанавливать рекуперативную мощность, сформированную в электромоторе 20, используется схема рекуперации мощности (например, схема преобразования переменного тока в постоянный), и значение сопротивления участка в этой схеме рекуперации мощности, который принимает рекуперативную мощность электромотора 20, должно изменяться аналогично переменному резистору VR, показанному на фиг. 5 и фиг. 6.
[0054] Третий вариант осуществления
В третьем варианте осуществления, приводится описание устройства 3 подвески в качестве другого варианта осуществления устройства 1 подвески. Следует отметить, что в описании устройства 3 подвески согласно третьему варианту осуществления, компоненты, которые описаны в первом варианте осуществления, обозначаются посредством ссылок с номерами, идентичных ссылкам с номерами в первом варианте осуществления, и их описание не приводится.
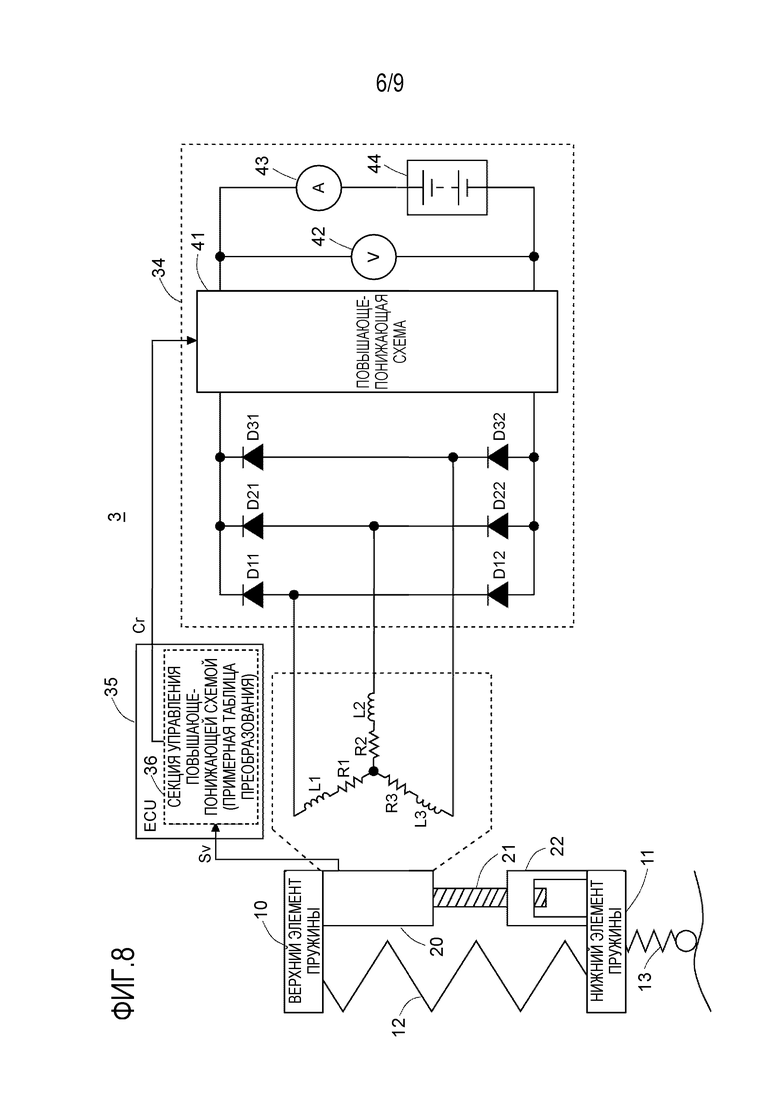
[0055] Фиг. 8 является блок-схемой конфигурации устройства подвески согласно третьему варианту осуществления. Как показано на фиг. 8, в устройстве 3 подвески согласно третьему варианту осуществления, схема 14 потребления мощности устройства 1 подвески согласно первому варианту осуществления заменяется схемой 34 потребления мощности, и электронная схема 15 управления заменяется электронной схемой 35 управления. Таким образом, схема 34 потребления мощности устройства 3 подвески согласно третьему варианту осуществления включает в себя повышающе-понижающую схему 41 в качестве конкретного примера схемы рекуперативной мощности, реализованной посредством переменного резистора VR устройства 2 подвески согласно второму варианту осуществления.
[0056] В качестве схемы регулирования нагрузки, схема 34 потребления мощности имеет повышающе-понижающую схему 41 и аккумуляторную батарею (например, аккумулятор 44). Схема 34 потребления мощности также имеет: устройство 42 измерения напряжения, которое измеряет значение напряжения, используемое для управления аккумулятором 44; и устройство 43 измерения тока, который измеряет значение тока. Повышающе-понижающая схема 41 повышает или понижает напряжение электромотора (например, разность напряжений между катодами диодов D11, D21, D31 и анодами диодов D12, D22, D32), сформированное в электромоторе 20, на основе сигнала Cr задания значений нагрузочного сопротивления и формирует выходное напряжение Vout со значением постоянного напряжения. Затем выходное напряжение Vout повышающе-понижающей схемы 41 прикладывается к аккумулятору 44, и рекуперативная мощность, сформированная в электромоторе 20, накапливается в нем.
[0057] Электронная схема 35 управления включает в себя секцию управления нагрузкой (например, секцию 36 управления повышающе-понижающей схемой). Секция 36 управления повышающе-понижающей схемой принимает скорость подвижного вала электромотора 20 в качестве измеренного значения Sv скорости хода и выводит сигнал Cr задания значений нагрузочного сопротивления со скважностью импульсов, которая соответствует принимаемому измеренному значению Sv скорости хода. Эта секция 36 управления повышающе-понижающей схемой имеет секцию формирования управляющих сигналов и таблицу преобразования, как показано на фиг. 2, например, и выводит сигнал Cr задания значений нагрузочного сопротивления со скважностью импульсов, которая соответствует измеренному значению Sv скорости хода, предоставленному посредством электромотора 20. Эта таблица преобразования показывает, например, корреляцию между скоростью хода и скважностью импульсов, как показано на фиг. 2. В таблице преобразования, предоставленной в секции 36 управления повышающе-понижающей схемой, описывается такая скважность импульсов, при которой демпфирующая сила, которая формируется, когда повышающе-понижающая схема 41 потребляет рекуперативную мощность электромотора 20, становится целевой демпфирующей силой, заданной в соответствии с измеренным значением Sv скорости хода.
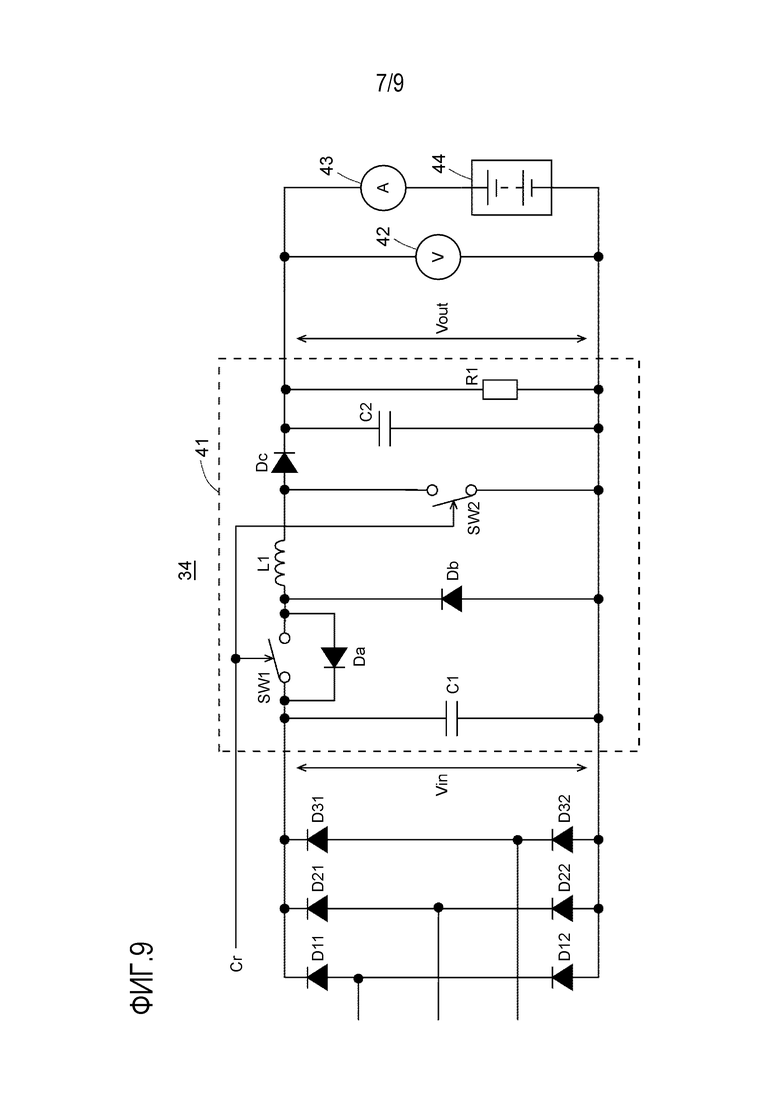
[0058] Здесь, приводится подробное описание повышающе-понижающей схемы 41. Фиг. 9 является принципиальной схемой повышающе-понижающей схемы устройства 3 подвески согласно третьему варианту осуществления. Как показано на фиг. 9, повышающе-понижающая схема 41 согласно третьему варианту осуществления имеет переключатели SW1, SW2, конденсаторы C1, C2, катушку L1 и диоды Da-Dc. Следует отметить, что в нижеприведенном описании, провод, с которым соединяются катоды диодов D11, D21, D31, провод, соединенный с положительным электродом аккумулятора 44 из числа выходных проводов повышающе-понижающей схемы 41, и провод, с которым соединяются аноды диодов D12, D22, D32, соответственно, упоминаются в качестве входного провода положительного электрода, выходного провода положительного электрода и провода отрицательного электрода. Отрицательный электрод аккумулятора 44 соединяется с проводом отрицательного электрода. В устройстве 3 подвески согласно третьему варианту осуществления, напряжение Vin электромотора, которое формируется посредством работы в рекуперативном режиме электромотора 20, формируется между входным проводом положительного электрода и проводом отрицательного электрода, и это напряжение Vin электромотора принимается посредством повышающе-понижающей схемы 41. Повышающе-понижающая схема 41 формирует выходное напряжение Vout между выходным проводом положительного электрода и проводом отрицательного электрода.
[0059] Конденсатор C1 соединяется между входным проводом положительного электрода и проводом отрицательного электрода. Один конец переключателя SW1 соединяется с входным проводом положительного электрода. Анод диода Da соединяется с другим концом переключателя SW1, и катод диода Da соединяется с одним концом переключателя SW1. Анод диода Db соединяется с проводом отрицательного электрода. Катод диода Db соединяется с другим концом переключателя SW1. Разомкнутое-замкнутое состояние переключателя SW1 управляется посредством сигнала Cr задания значений нагрузочного сопротивления.
[0060] Один конец катушки L1 соединяется с другим концом переключателя SW1. Один конец переключателя SW2 соединяется с другим концом катушки L1. Другой конец переключателя SW2 соединяется с отрицательным электродом. Анод диода Dc соединяется с другим концом катушки L1. Катод диода Dc соединяется с выходным проводом положительного электрода. Конденсатор C1 соединяется между выходным проводом положительного электрода и проводом отрицательного электрода. Резистор R1 соединяется между выходным проводом положительного электрода и проводом отрицательного электрода.
[0061] Каждый параметр повышающе-понижающей схемы 41 задается таким образом, что напряжение Vin электромотора и выходное напряжение Vout становятся равным напряжением, когда скважность импульсов для сигнала Cr задания значений нагрузочного сопротивления составляет 50%. Когда скважность импульсов для сигнала Cr задания значений нагрузочного сопротивления становится выше 50%, повышающе-понижающая схема 41 повышает выходное напряжение Vout таким образом, что оно является более высоким напряжением, чем напряжение Vin электромотора. Между тем, когда скважность импульсов для сигнала Cr задания значений нагрузочного сопротивления становится ниже 50%, повышающе-понижающая схема 41 понижает выходное напряжение Vout таким образом, что оно является более низким напряжением, чем напряжение Vin электромотора.
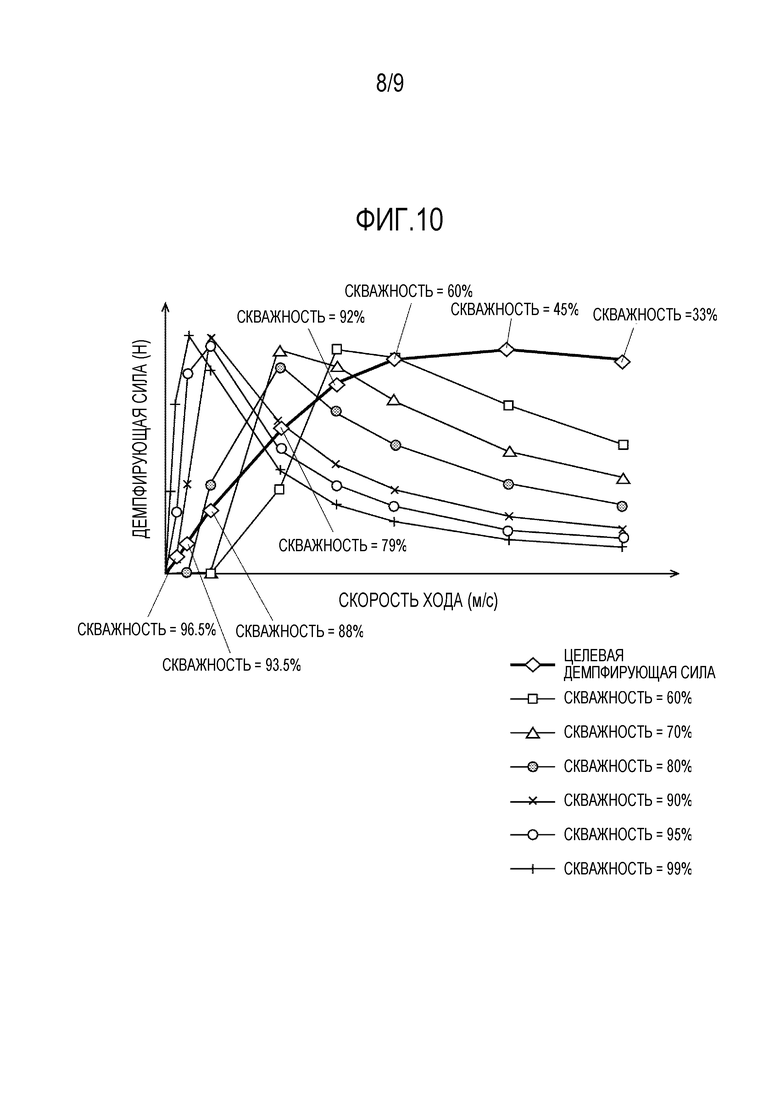
[0062] Здесь, приводится описание взаимосвязи между скважностью импульсов для сигнала Cr задания значений нагрузочного сопротивления, который предоставляется в повышающе-понижающую схему 41, и демпфирующей силой, сформированной в электромоторе 20. Фиг. 10 является графиком, который иллюстрирует характеристику демпфирования амортизатора согласно третьему варианту осуществления. Как показано на фиг. 10, в устройстве 3 подвески согласно третьему варианту осуществления, в случае если скорость хода электромотора 20 является низкой, большая демпфирующая сила может получаться по мере того, как скважность импульсов увеличивается. Между тем, в устройстве 3 подвески согласно третьему варианту осуществления, в случае если скорость хода электромотора 20 является высокой, большая демпфирующая сила может получаться по мере того, как скважность импульсов уменьшается.
[0063] Затем в устройстве 3 подвески согласно третьему варианту осуществления, скважность импульсов изменяется в соответствии со скоростью хода, с тем чтобы получать целевую демпфирующую силу. В примере, показанном на фиг. 10, вместе с увеличением скорости хода, скважность импульсов изменяется на 96,5%, 93,5%, 88%, 79%, 92%, 60%, 45% и 33%. Таким образом, получается демпфирующая сила, которая равна целевой демпфирующей силе.
[0064] Далее приводится описание взаимосвязи между скважностью импульсов для сигнала Cr задания значений нагрузочного сопротивления, предоставленного в повышающе-понижающую схему 41, и рекуперативной мощностью, рекуперированной посредством повышающе-понижающей схемы 41. Фиг. 11 является графиком, который иллюстрирует рекуперативную мощность амортизатора согласно третьему варианту осуществления. Как показано на фиг. 11, следует понимать, что в устройстве 3 подвески согласно третьему варианту осуществления, мощность, которая может быть рекуперирована, увеличивается по мере того, как скорость хода электромотора 20 увеличивается. Также следует понимать, что устройство 3 подвески согласно третьему варианту осуществления имеет значительную тенденцию к тому, что большая величина рекуперативной мощности может получаться посредством уменьшения скважности импульсов для сигнала Cr задания значений нагрузочного сопротивления по мере того, как скорость хода электромотора 20 увеличивается. Кроме того, следует понимать, что также в случае, если скважность импульсов для сигнала Cr задания значений нагрузочного сопротивления изменяется, чтобы получать целевую демпфирующую силу, описанную на фиг. 10, мощность, которая может быть рекуперирована, увеличивается по мере того, как скорость хода электромотора 20 увеличивается. Фиг. 11 показывает идеальное значение мощности, которая может быть рекуперирована с целевой демпфирующей силой. В примере, показанном на фиг. 11, наблюдается разность между этим идеальным значением рекуперативной мощности и фактически полученной рекуперативной мощностью, и считается, что эта разности обусловлена эффективностью преобразования, потерями и т.п. в повышающе-понижающей схеме 41.
[0065] Из вышеприведенного описания, в устройстве 3 подвески согласно третьему варианту осуществления, схема 34 потребления мощности включает в себя повышающе-понижающую схему 41 и аккумулятор 44, который заряжается рекуперативной мощностью. Таким образом, аккумулятор 44 может заряжаться рекуперативной мощностью, которая формируется, чтобы ослаблять вращающую силу электромотора 20.
[0066] В вышеприведенном описании, изобретение подробно описано на основе вариантов осуществления. Тем не менее, разумеется, что изобретение не ограничено ранее упомянутыми вариантами осуществления, и различные изменения могут вноситься в них в пределах объема, который не отступает от сущности изобретения.
Изобретение относится к устройству подвески. Устройство подвески содержит пружину, электромотор, схему потребления мощности и секцию управления нагрузкой. Пружина предоставлена между верхним элементом и нижним элементом. Электромотор предоставлен смежно с пружиной и выполнен с возможностью формировать мощность в соответствии со скоростью, на которой работает подвижный вал. Подвижный вал является подвижным в соответствии с действиями верхнего элемента и нижнего элемента в направлении расширения-сжатия пружины. Схема потребления мощности включает в себя схему регулирования нагрузки, которая выполнена с возможностью формировать демпфирующую силу в электромоторе посредством потребления энергии, сформированной в электромоторе, и изменять демпфирующую силу. Секция управления нагрузкой выполнена с возможностью управлять схемой регулирования нагрузки таким образом, что потребляемая мощность посредством схемы регулирования нагрузки увеличивается вместе с увеличением скорости подвижного вала. Достигается возможность увеличения демпфирующей силы в диапазоне скоростей, в котором демпфирующая сила насыщается вследствие характеристики электромотора. 6 з.п. ф-лы, 11 ил.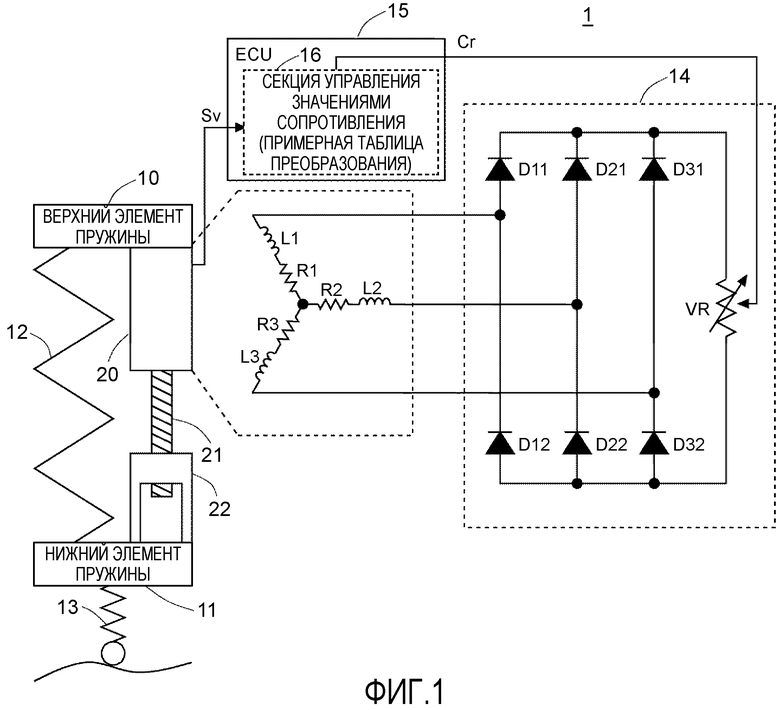
1. Устройство подвески, содержащее:
- пружину, предоставленную между верхним элементом и нижним элементом;
- электромотор, предоставленный смежно с пружиной, причем электромотор выполнен с возможностью формировать мощность в соответствии со скоростью, на которой работает подвижный вал, причем подвижный вал является подвижным в соответствии с действиями верхнего элемента и нижнего элемента в направлении расширения-сжатия пружины;
- схему потребления мощности, включающую в себя схему регулирования нагрузки, причем схема регулирования нагрузки выполнена с возможностью формировать демпфирующую силу в электромоторе посредством потребления энергии, сформированной в электромоторе, и изменять демпфирующую силу; и
- секцию управления нагрузкой, выполненную с возможностью управлять схемой регулирования нагрузки таким образом, что потребляемая мощность посредством схемы регулирования нагрузки увеличивается вместе с увеличением скорости подвижного вала;
причем секция управления нагрузкой имеет:
- первую таблицу преобразования, которая указывает взаимосвязь между скоростью подвижного вала и значением сопротивления схемы регулирования нагрузки, причем первая таблица преобразования предоставляется для первого рабочего режима;
- вторую таблицу преобразования, которая указывает взаимосвязь между скоростью подвижного вала и значением сопротивления схемы регулирования нагрузки, причем вторая таблица преобразования предоставляется для второго рабочего режима; и
- секцию формирования управляющих сигналов, которая выполнена с возможностью считывать заданное значение скважности импульсов, используемое для того, чтобы реализовывать скорость подвижного вала и значение сопротивления схемы регулирования нагрузки, из любой из первой таблицы преобразования и второй таблицы преобразования в соответствии с сигналом переключения режима и формировать сигнал широтно-импульсной модуляции со скважностью импульсов, которая соответствует считанному заданному значению скважности импульсов;
причем время переключения значения сопротивления схемы регулирования нагрузки соответствует скорости подвижного вала, при которой кривые демпфирующей силы, соответствующие скоростям подвижного вала, пересекают друг друга на графике, указывающем отношение между демпфирующей силой и скоростью подвижного вала.
2. Устройство подвески по п. 1, в котором:
- секция управления нагрузкой выполнена с возможностью поддерживать значение сопротивления схемы регулирования нагрузки равным указанному значению, когда скорость подвижного вала равна или меньше заданной скорости.
3. Устройство подвески по п. 1, в котором:
- секция управления нагрузкой имеет таблицу преобразования, которая указывает взаимосвязь между скоростью подвижного вала и значением сопротивления схемы регулирования нагрузки, и секция управления нагрузкой выполнена с возможностью выводить сигнал задания значений нагрузочного сопротивления на основе таблицы преобразования, причем сигнал задания значений нагрузочного сопротивления используется для того, чтобы задавать значение сопротивления схемы регулирования нагрузки равным значению, соответствующему скорости подвижного вала.
4. Устройство подвески по п. 1, в котором:
- схема регулирования нагрузки имеет: нагрузочный резистор, который имеет предварительно определенное значение сопротивления; и переключатель, последовательно соединенный с нагрузочным резистором, и
- секция управления нагрузкой имеет секцию формирования управляющих сигналов, которая выполнена с возможностью формировать сигнал широтно-импульсной модуляции таким образом, что скважность импульсов уменьшается по мере того, как значение сопротивления схемы регулирования нагрузки увеличивается, причем сигнал широтно-импульсной модуляции используется для того, чтобы переключать разомкнутое-замкнутое состояние переключателя.
5. Устройство подвески по п. 1, в котором:
- секция управления нагрузкой выполнена с возможностью переключать режим работы между первым рабочим режимом и вторым рабочим режимом в соответствии с сигналом переключения режима, предоставленным снаружи, и
секция управления нагрузкой выполнена с возможностью
- в первом рабочем режиме – управлять значением сопротивления схемы регулирования нагрузки таким образом, что значение сопротивления схемы регулирования нагрузки увеличивается вместе с увеличением скорости подвижного вала, и
- во втором рабочем режиме – управлять значением сопротивления схемы регулирования нагрузки таким образом, что демпфирующая сила в схеме регулирования нагрузки становится наибольшей для скорости подвижного вала.
6. Устройство подвески по п. 1, в котором:
- секция управления нагрузкой имеет секцию формирования управляющих сигналов, выполненную с возможностью формировать сигнал задания значений нагрузочного сопротивления, включающий в себя скважность импульсов, которая соответствует скорости подвижного вала, и
- схема регулирования нагрузки включает в себя: повышающе-понижающую схему, которая выполнена с возможностью повышать или понижать напряжение электромотора, сформированное в электромоторе, на основе сигнала задания значений нагрузочного сопротивления, чтобы формировать выходное напряжение со значением постоянного напряжения; и аккумуляторную батарею, к которой прикладывается выходное напряжение и в которой накапливается рекуперативная энергия, сформированная в электромоторе.
7. Устройство подвески по п. 6, в котором:
- скважность импульсов для сигнала задания значений нагрузочного сопротивления задается таким образом, что демпфирующая сила, сформированная посредством схемы регулирования нагрузки посредством потребления энергии, сформированной в электромоторе, становится целевой демпфирующей силой.
| JP 2007290669 A, 08.11.2007 | |||
| ШАРОШКА БУРОВОГО ДОЛОТА | 2011 |
|
RU2452840C1 |
| US 2010262308 A1, 14.10.2010 | |||
| Дисковый вентильный двигатель индукторного типа с униполярным возбуждением | 2023 |
|
RU2821265C1 |

