Предлагаемое техническое решение относится к измерительно-контрольной технике, в частности к технике видеорегистрации объектов наблюдения, в том числе подвижных объектов.
Из уровня техники известен способ контроля высоты подрыва боевой части беспилотного летательного аппарата (описание к патенту РФ №2550100, дата приоритета 28.04.2014, МПК F41H 13/00, G05D 1/00), при котором в беспилотном летательном аппарате размещают средство формирования вспышки и, по меньшей мере, два средства видеорегистрации в зоне прямой видимости цели, перед полетом задают параметры цели, формируют полетное задание беспилотного летательного аппарата и производят пуск беспилотного летательного аппарата, во время полета контролируют высоту беспилотного летательного аппарата, при достижении высоты подрыва боевой части формируют вспышку, средством видеорегистрации фиксируют вспышку, проходящую через средство для фильтрации помех, передают отфильтрованные данные на средство обработки данных и рассчитывают высоту подрыва боевой части, используя данные, полученные с наземной телеметрической станции.
Недостатком аналога является отсутствие видеоконтроля в реальном режиме времени и сложная система приема звукового сигнала, которая должна распознавать факт приближения БПЛА в район цели.
Из уровня техники известен также способ контроля результатов поражения цели (RU, патент №2247312, дата приоритета 23.10.2009, МПК F42B 15/00, 25/00), выбранный в качестве прототипа, при котором используют средства наблюдения и передачи удаленному оператору данных о зоне нанесения удара, отличающийся тем, что средства наблюдения размещают в автономном модуле носителя боевого средства, при этом передачу данных осуществляют после отделения модуля от носителя, трансляцию видеосигнала, предпочтительно в цифровой форме, с оптического средства контроля осуществляют на удаленный приемник-ретранслятор, размещенный, например, на борту удаленного летательного аппарата, с последующим анализом видеосигнала пунктом корректировки целенаведения.
Недостаток прототипа заключается в невозможности его использования для видеорегистрации высокоскоростных объектов, а также объектов, расположенных близко к земной или морской поверхности.
Технической проблемой заявляемого изобретения является разработка способа мобильной видеорегистрации преимущественно для видеорегистрации высокоскоростных объектов, а также объектов вблизи относительно земной или морской поверхности.
Техническая проблема решается за счет того, что заявляемый способ мобильной видеорегистрации включает наблюдение за объектом, формирование видеосигнала с дальнейшей передачей на удаленный приемник, при этом формирование управляющего сигнала осуществляют в управляющем модуле блока управления с последующей передачей управляющего сигнала на модуль передачи управляющего сигнала, передают управляющий сигнал от модуля передачи управляющего сигнала в модуль приема управляющего сигнала блока контроля объекта, контроль за объектом наблюдения ведут с помощью входящих в состав блока контроля объекта модуля видеорегистрации объекта наблюдения, модуля регистрации местоположения объекта наблюдения и модуля регистрации параметров внешней среды, передают в модуль связи и навигации блока контроля объекта информацию от модуля приема управляющего сигнала, модуля регистрации местоположения объекта наблюдения, модуля видеорегистрации объекта наблюдения и модуля регистрации параметров внешней среды, формируют видеосигнал в модуле связи и навигации, откуда видеосигнал передают в модуль передачи видеоинформации, осуществляют передачу видеосигнала от модуля передачи видеоинформации в модуль приема видеоинформации блока управления, передают видеоинформацию в управляющий модуль блока управления.
В одном из частных случаев реализации способа мобильной видеорегистрации в блоке контроля объекта с помощью модуля регистрации параметров внешней среды определяют параметры внешней среды с последующим включением информации о параметрах внешней среды в состав передаваемого видеосигнала.
В другом частном случае реализации способа мобильной видеорегистрации передачу и прием управляющего сигнала, а также передачу и прием видеосигнала осуществляют на расстоянии, не превышающем пятидесяти километров.
Технический результат заявляемого способа мобильной видеорегистрации заключается в возможности осуществления видеорегистрации высокоскоростных объектов, а также объектов вблизи относительно земной или морской поверхности.
Из уровня техники известно устройство для реализации способа контроля высоты подрыва боевой части беспилотного летательного аппарата (описание к патенту РФ №2550100, дата приоритета 28.04.2014, МПК F41H 13/00, G05D 1/00), состоящее из передающей и принимающей частей, при этом передающая часть включает в себя: средство для контроля высоты аппарата и средство формирования вспышки, размещенные в корпусе беспилотного летательного аппарата, причем приемная часть состоит из средства для фильтрации помех, средства приема звуковых сигналов, по крайней мере двух средств для видеорегистрации, расположенных в зоне прямой видимости мишени, наземную телеметрическую станцию и средство для обработки данных, размещенные на определенном расстоянии от периметра мишени, при этом средство формирования вспышки содержит средство управления и средство излучения, причем выход средства для контроля высоты беспилотного летательного аппарата соединен с входом средства управления, выход средства управления соединен со входом средства излучения, выход средства для фильтрации помех соединен с первым входом средства для видеорегистрации и выход средства приема звуковых сигналов - со вторым входом средства для видеорегистрации, при этом выход средства для видеорегистрации соединен с первым входом средства для обработки данных, а выход наземной телеметрической станции соединен со вторым входом средства обработки данных.
Из уровня техники известно также устройство контроля результатов поражения цели (RU, описание к патенту на изобретение №2247312, дата приоритета 23.10.2009, МПК F42B 15/00, 25/00), выбранное в качестве прототипа, которое содержит средства наблюдения и передачи удаленному оператору данных о зоне нанесения удара, причем средства наблюдения размещены в автономном модуле носителя боевого средства, средства трансляции видеосигнала, предпочтительно в цифровой форме, с оптическое средство контроля, ретранслятор, размещенный, например, на борту удаленного летательного аппарата, средства обработки данных.
Недостаток прототипа заключается в невозможности его использования для видеорегистрации высокоскоростных объектов, а также объектов вблизи относительно земной или морской поверхности.
Технической проблемой заявляемого изобретения является разработка устройства мобильной видеорегистрации для реализации способа мобильной видеорегистрации, преимущественно для высокоскоростных объектов, а также объектов вблизи относительно земной или морской поверхности.
Техническая проблема решается за счет того, что устройство мобильной видеорегистрации для реализации способа по п. 1, содержит блок контроля объекта и блок управления, удаленные друг от друга, при этом блок управления включает в себя модуль передачи управляющего сигнала, управляющий модуль и модуль приема видеоинформации, а блок контроля объекта включает в себя модуль приема управляющего сигнала, модуль видеорегистрации объекта наблюдения, модуль регистрации местоположения объекта наблюдения, модуль передачи видеоинформации, а также модуль связи и навигации, при этом вход управляющего модуля связан с выходом модуля приема видеоинформации, выход управляющего модуля связан с входом модуля передачи управляющего сигнала, выход модуля приема управляющего сигнала связан с первым входом модуля связи и навигации, выход модуля видеорегистрации объекта наблюдения связан со вторым входом модуля связи и навигации, выход модуля регистрации местоположения объекта наблюдения связан с третьим входом модуля связи и навигации, выход модуля связи и навигации связан со входом модуля передачи видеоинформации.
В одном из частных случаев реализации устройства мобильной видеорегистрации блок контроля объекта содержит модуль регистрации параметров внешней среды, выход которого связан с входом модуля связи и навигации.
В другом частном случае реализации устройства мобильной видеорегистрации расстояние между модулем передачи управляющего сигнала и приема управляющего сигнала, а также расстояние между модулем передачи видеоинформации и модулем приема видеоинформации не превышает пятидесяти километров.
Технический результат заявляемого устройства мобильной видеорегистрации для реализации способа мобильной видеорегистрации заключается в возможности осуществления видеорегистрации высокоскоростных объектов, а также объектов вблизи относительно земной или морской поверхности.
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена блок-схема устройства мобильной видеорегистрации для реализации способа мобильной видеорегистрации; на фиг. 2 - пример реализации модуля передачи управляющего сигнала; на фиг. 3 - пример реализации модуля приема видеоинформации; на фиг. 4 - пример реализации модуля приема видеоинформации; на фиг. 5 - пример видеоизображения на экране персонального компьютера при выборе четырех камер модуля видеорегистрации объекта наблюдения; на фиг. 6 - вариант исполнения внешнего вида модуля связи и навигации; на фиг. 7 - один из вариантов внешнего вида управляемой видеокамеры модуля видеорегистрации; на фиг. 8 - пример внешнего вида модуля регистрации параметров внешней среды с анемометром; на фиг. 9 - пример внешнего вида аппаратуры модуля регистрации местоположения; на фиг. 10 - пример внешнего вида аппаратуры модуля передачи видеоинформации.
Пример реализации способа мобильной видеорегистрации на базе устройства для реализации способа мобильной видеорегистрации иллюстрируется блок схемой, представленной на фиг. 1. Формирование управляющего сигнала осуществляют в управляющем модуле (4) блока управления (1) с последующей передачей управляющего сигнала на модуль передачи управляющего сигнала (3), передают управляющий сигнал от модуля передачи управляющего сигнала (3) в модуль приема управляющего сигнала (6) блока контроля объекта (2), контроль за объектом наблюдения ведут с помощью входящих в состав блока контроля объекта (2) модуля видеорегистрации объекта наблюдения (7), определяют местоположение объекта в момент видеорегистрации с помощью модуля регистрации местоположения (9), передают в модуль связи и навигации (11) блока контроля объекта (2) информацию от модуля приема управляющего сигнала (6), модуля регистрации местоположения (9), модуля видеорегистрации объекта наблюдения (7), формируют видеосигнал в модуле связи и навигации (11), откуда видеосигнал передают в модуль передачи видеоинформации (10), осуществляют передачу видеосигнала от модуля передачи видеоинформации (10) в модуль приема видеоинформации (5) блока управления (1), передают видеоинформацию в управляющий модуль (4) блока управления (1).
В частном случае реализации в блоке контроля объекта (2) с помощью модуля регистрации параметров внешней среды (8) дополнительно определяют параметры внешней среды с последующим включением информации о параметрах внешней среды в состав передаваемого видеосигнала.
Передачу и прием управляющего сигнала, а также передачу и прием видеосигнала могут осуществлять на расстоянии, не превышающем пятидесяти километров.
Мобильную видеорегистрацию объекта наблюдения осуществляют следующим образом. Аппаратуру блока управления (1) размещают на расстоянии не более 50 км от места установки аппаратуры блока контроля объекта (2) при наличии прямой видимости, при других условиях расстояние сокращается из-за затухания распространения радиоволн. После включения модуля передачи управляющего сигнала (3) и модуля приема видеоинформации (5) оператор в управляющем модуле (4) имеет возможность выбрать режим работы устройства - «Ожидание», во время которого работает только модуль приема управляющего сигнала (6), «Просмотр», во время которого модуль передачи видеоинформации (10) передает на модуль приема видеоинформации (5) видеоизображение в реальном масштабе времени, и «Запись», во время которого модуль видеорегистрации объекта наблюдения (7) осуществляет скоростную запись видеоинформации, причем модуль передачи видеоинформации (10) может осуществлять одновременную передачу видеоизображения на модуль приема видеоинформации (5). Режимы могут быть установлены как последовательно, так и параллельно. Все команды подают от управляющего модуля (4) на модуль передачи управляющего сигнала (3), в котором они усиливаются на частоте fl и передаются в эфир с помощью антенны. Модуль приема видеоинформации (5) блока управления (1) с помощью телевизионной антенны принимает сигнал от модуля передачи видеоинформации (10) блока контроля объекта (2), передает его в Модуль приема видеоинформации (5), и далее в управляющий модуль (4). На экране монитора персонального компьютера управляющего модуля (4) оператор наблюдает мишенную обстановку от одной любой или всех четырех видеокамер модуля видеорегистрации объекта наблюдения (7) блока контроля объекта (2). Одновременно на экране может отображаться метеорологическая информация от объекта контроля (мишени) и служебная информация, например, об уровне заряда аккумуляторной батареи блока контроля объекта (2) и текущего режима работы устройства мобильной видеорегистрации. Пример видеоизображения на экране персонального компьютера управляющего модуля представлен на фиг. 5.
Аппаратуру блока контроля объекта (2) размещают в относительной близости от объекта наблюдения. В случае наличия в модуле видеорегистрации объекта наблюдения (7) более одной управляемой видеокамеры, они могут быть расположены на расстоянии до 60 метров от модуля связи и навигации (11). Каждая управляемая видеокамера может быть снабжена картой памяти (MicroSD) - это энергонезависимая память, в которой хранятся видеофайлы скоростной съемки объекта. После окончания эксперимента, карты памяти могут быть извлечены из видеокамер, видеофайлы могут быть скопированы на персональный компьютер управляющего модуля (4) блока управления (1) для дальнейшего анализа.
Устройство мобильной видеорегистрации, предназначенное для реализации способа мобильной видеорегистрации, пример конкретного исполнения которой представлен на фиг. 1, содержит блок управления (1) и блок контроля объекта (2). Блок управления (1) состоит из модуля передачи управляющего сигнала (3), управляющего модуля (4) и модуля приема видеоинформации (5), а блок контроля объекта (2) в общем случае состоит из модуля приема управляющего сигнала (6), модуля видеорегистрации объекта наблюдения (7), модуля регистрации местоположения (9), модуля передачи видеоинформации (10) и модуля связи и навигации (11). В частном случае блок контроля объекта (2) может дополнительно содержать также модуль регистрации параметров внешней среды (8), выход которого связан с входом модуля связи и навигации (2). В общем случае вход управляющего модуля (4) связан с выходом модуля приема видеоинформации (5), выход управляющего модуля (4) связан с входом модуля передачи управляющего сигнала (3), выход модуля приема управляющего сигнала (6) связан с первым входом модуля связи и навигации (11), выход модуля видеорегистрации объекта наблюдения (7) связан со вторым входом модуля связи и навигации (11), выход модуля регистрации местоположения объекта наблюдения (9) связан с третьим входом модуля связи и навигации (11), выход модуля связи и навигации (11) связан со входом модуля передачи видеоинформации (10).
Модуль передачи управляющего сигнала (3) в конкретном примере исполнения может представлять собой совокупность металлического блока [см. фиг. 2] и передающей антенны, выполненной, например, в виде штыря. Модуль передачи управляющего сигнала (3) может быть снабжен встроенной аккумуляторной батареей с разъемом для подзарядки, а также выключателем электропитания с индикатором работы. Управляющий модуль (4) может быть выполнен на базе персонального компьютера. Модуль приема видеоинформации (5) в конкретном примере исполнения может представлять собой совокупность металлического блока с установленной узконаправленной приемной антенной [см. фиг. 3]. Модуль приема видеоинформации (5) может быть снабжен встроенной аккумуляторной батареей с разъемом для подзарядки, а также выключателем электропитания с индикатором работы. Связь управляющего модуля (4) в виде персонального компьютера с модулем приема видеоинформации (5) может осуществляться через стандартный кабель USB. Модуль приема видеоинформации (5) с приемной антенной может быть установлен на штатив [см. фиг. 4] для точной настройки направления приема по азимуту и углу места от модуля передачи видеоинформации (10) блока контроля объекта (2).
Одновременно на экране управляющего модуля (4) в виде персонального компьютера может быть отображена метеоинформация от модуля регистрации параметров внешней среды (8) и служебная информация об уровне заряда аккумуляторной батареи блока контроля объекта (2), а также текущего режима работы устройства мобильной видеорегистрации. Пример видеоизображения на экране персонального компьютера при выборе четырех камер модуля видеорегистрации объекта наблюдения (7) представлен на фиг. 5.
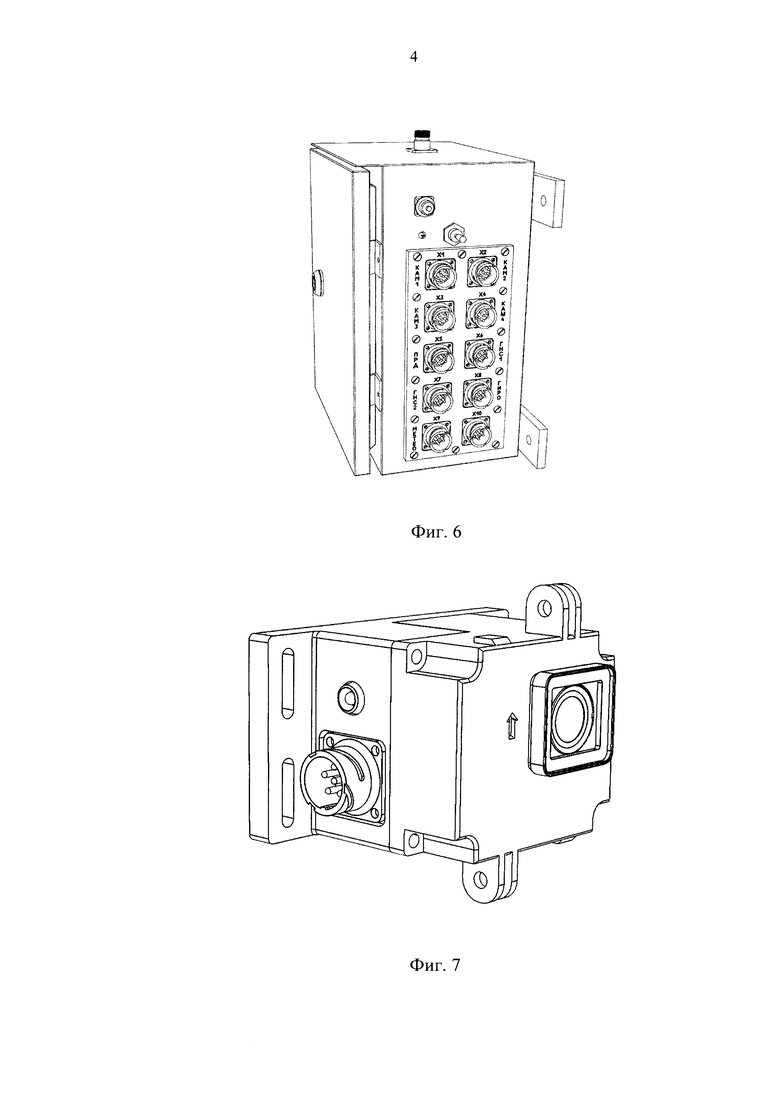
Блок контроля объекта (2) включает в себя модуль приема управляющего сигнала (6), модуль видеорегистрации объекта наблюдения (7), модуль регистрации параметров внешней среды (8), модуль регистрации местоположения объекта наблюдения (9), модуль передачи видеоинформации (10), а также модуль связи и навигации (11). Модуль приема управляющего сигнала (6) содержит приемную антенну и соединен с блоком связи и навигации (11). Модуль связи и навигации (11) может иметь встроенную аккумуляторную батарею с разъемом для подзарядки, выключатель электропитания с индикатором работы, а также разъемы для подключения других модулей (6-10). Вариант внешнего вида модуля связи и навигации (11) представлен на фиг. 6. Модуль видеорегистрации объекта наблюдения (7) содержит, по меньшей мере, одну управляемую видеокамеру, изготовленную, например, из ударопрочного пластика методом послойного наложения расплава (3-D печати), с разъемом на корпусе для связи с модулем связи и навигации (11) и индикатором работы. Для более эффективной работы модуль видеорегистрации объекта наблюдения (7) может содержать четыре управляемых видеокамеры, один из вариантов внешнего вида управляемой видеокамеры представлен на фиг. 7. Каждая управляемая видеокамера имеет энергонезависимую память, выполненную, например, в виде карты памяти MicroSD, в которой могут храниться видеофайлы скоростной съемки объекта наблюдения.
Модуль регистрации параметров внешней среды (8) может содержать в своем составе, например, выносной анемометр с кронштейном, на котором установлена обрабатывающая аппаратура и флюгерная система измерения скорости и направления ветра. Модуль регистрации параметров внешней среды (8) имеет разъем для связи с модулем связи и навигации (11). Внешний вид модуля регистрации параметров внешней среды (8) с анемометром представлен на фиг. 8.
Модуль регистрации местоположения (9) предназначен для приема координат со спутниковых систем GPS и ГЛОНАСС и передача их в модуль связи и навигации (11), где происходит их расшифровка и расчет положения относительно сторон света. Модуль регистрации местоположения (9) может быть изготовлен в виде по меньшей мере одного корпуса из ударопрочного пластика методом послойного наложения расплава (3-D печати) с разъемом для связи с модулем связи и навигации (11) и индикатором работы. В случае изготовления модуля регистрации местоположения (9) из двух и более корпусов, они могут быть расположены на некотором расстоянии друг от друга для повышения эффективности определения местоположения. Пример внешнего вида корпуса модуля регистрации местоположения (9) показан на фиг. 9.
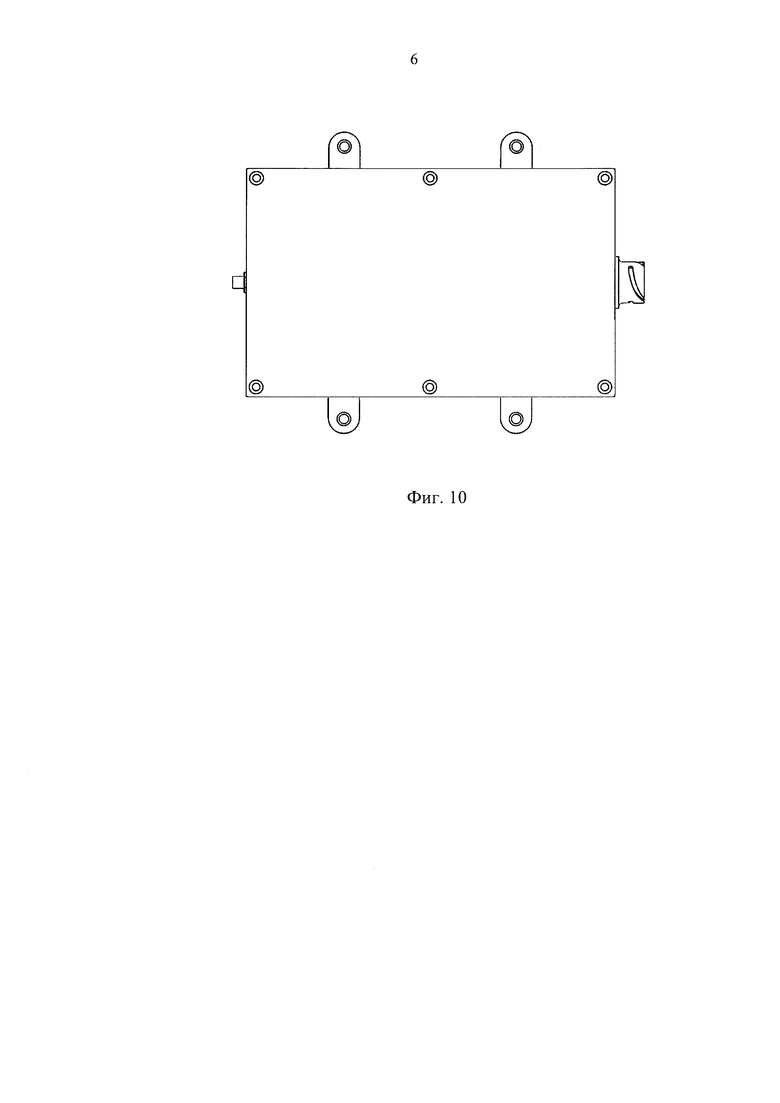
Модуль передачи видеоинформации (10) может представлять собой металлический моноблок с двумя соединителями: первый - для подключения передающей антенны, которая может быть установлена непосредственно на разъем, второй - для связи с модулем связи и навигации (11). Внешний вид модуля передачи видеоинформации (10) представлен на фиг. 10.
Устройство мобильной видеорегистрации работает следующим образом. Аппаратуру блока управления (1) размещают на расстоянии не более 50 км от места установки аппаратуры блока контроля объекта (2) при наличии прямой видимости, при других условиях расстояние сокращается из-за затухания распространения радиоволн. После включения модуля передачи управляющего сигнала (3) и модуля приема видеоинформации (5) оператор в управляющем модуле (4) имеет возможность выбрать режим работы устройства - «Ожидание», во время которого работает только модуль приема управляющего сигнала (6), «Просмотр», во время которого модуль передачи видеоинформации (10) передает на модуль приема видеоинформации (5) видеоизображение в реальном масштабе времени, и «Запись», во время которого модуль видеорегистрации объекта наблюдения (7) осуществляет скоростную запись видеоинформации, причем модуль передачи видеоинформации (10) может осуществлять одновременную передачу видеоизображения на модуль приема видеоинформации (5). Режимы могут быть установлены как последовательно, так и параллельно. Все команды подают от управляющего модуля (4) на модуль передачи управляющего сигнала (3), в котором они усиливаются на частоте fl и передаются в эфир с помощью антенны. Модуль приема видеоинформации (5) блока управления (1) с помощью телевизионной антенны принимает сигнал от модуля передачи видеоинформации (10) блока контроля объекта (2), передает его в Модуль приема видеоинформации (5), и далее в управляющий модуль (4). На экране монитора персонального компьютера управляющего модуля (4) оператор наблюдает мишенную обстановку от одной любой или всех четырех видеокамер модуля видеорегистрации объекта наблюдения (7) блока контроля объекта (2). Одновременно на экране может отображаться метеорологическая информация от объекта контроля (мишени) и служебная информация, например, об уровне заряда аккумуляторной батареи блока контроля объекта (2) и текущего режима работы устройства мобильной видеорегистрации. Пример видеоизображения на экране персонального компьютера управляющего модуля представлен на фиг. 5.
Аппаратуру блока контроля объекта (2) размещают в относительной близости от объекта наблюдения. В случае наличия в модуле видеорегистрации объекта наблюдения (7) более одной управляемой видеокамеры, они могут быть расположены на расстоянии до 60 метров от модуля связи и навигации (11). Каждая управляемая видеокамера может быть снабжена картой памяти (MicroSD) - это энергонезависимая память, в которой хранятся видеофайлы скоростной съемки объекта. После окончания эксперимента, карты памяти могут быть извлечены из видеокамер, видеофайлы могут быть скопированы на персональный компьютер управляющего модуля (4) блока управления (1) для дальнейшего анализа.
Все составляющие блоки и модули устройства мобильной видеорегистрации для реализации способа мобильной видеорегистрации могут быть изготовлены с использованием существующей элементной базы, применение настоящего изобретения позволяет осуществлять эффективную мобильную видеорегистрацию объектов наблюдения, в том числе движущихся на высокой скорости вблизи земной поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ дистанционного контроля и регистрации технологических операций на транспорте | 2020 |
|
RU2744500C1 |
| ШАХТНАЯ СИСТЕМА МОНИТОРИНГА, ОПОВЕЩЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГОРНОРАБОЧИХ | 2009 |
|
RU2401947C2 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| УНИФИЦИРОВАННЫЙ ТЕРМИНАЛ ОБМЕНА И ДОВЕДЕНИЯ ИНФОРМАЦИИ | 2022 |
|
RU2793068C1 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ С ПЕРЕДАЧЕЙ ИЗОБРАЖЕНИЯ ПО УЗКОПОЛОСНЫМ КАНАЛАМ СВЯЗИ | 2011 |
|
RU2459377C1 |
| Система и способ дистанционного контроля и регистрации технологических операций на транспорте | 2018 |
|
RU2709980C2 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2244641C1 |




Изобретение относится к измерительно-контрольной технике. Технический результат заключается в возможности осуществления видеорегистрации высокоскоростных объектов. В способе формирование управляющего сигнала осуществляют в управляющем модуле блока управления с последующей передачей управляющего сигнала на модуль передачи управляющего сигнала, передают управляющий сигнал от модуля передачи управляющего сигнала в модуль приема управляющего сигнала блока контроля объекта, контроль за объектом наблюдения ведут с помощью входящих в состав блока контроля объекта модуля видеорегистрации объекта наблюдения, определяют местоположение объекта в момент видеорегистрации с помощью модуля регистрации местоположения, передают в модуль связи и навигации блока контроля объекта информацию от модуля приема управляющего сигнала, модуля регистрации местоположения, модуля видеорегистрации объекта наблюдения, формируют видеосигнал в модуле связи и навигации, откуда видеосигнал передают в модуль передачи видеоинформации, осуществляют передачу видеосигнала от модуля передачи видеоинформации в модуль приема видеоинформации блока управления, передают видеоинформацию в управляющий модуль блока управления. 2 н. и 4 з.п. ф-лы, 10 ил.
1. Способ мобильной видеорегистрации, включающий наблюдение за объектом, формирование видеосигнала с дальнейшей передачей на удаленный приемник, отличающийся тем, что формирование управляющего сигнала осуществляют в управляющем модуле блока управления с последующей передачей управляющего сигнала на модуль передачи управляющего сигнала, передают управляющий сигнал от модуля передачи управляющего сигнала в модуль приема управляющего сигнала блока контроля объекта, контроль за объектом наблюдения ведут с помощью входящих в состав блока контроля объекта модуля видеорегистрации объекта наблюдения, определяют местоположение объекта в момент видеорегистрации с помощью модуля регистрации местоположения, передают в модуль связи и навигации блока контроля объекта информацию от модуля приема управляющего сигнала, модуля регистрации местоположения, модуля видеорегистрации объекта наблюдения, формируют видеосигнал в модуле связи и навигации, откуда видеосигнал передают в модуль передачи видеоинформации, осуществляют передачу видеосигнала от модуля передачи видеоинформации в модуль приема видеоинформации блока управления, передают видеоинформацию в управляющий модуль блока управления.
2. Способ по п. 1, отличающийся тем, что в блоке контроля объекта с помощью модуля регистрации параметров внешней среды дополнительно определяют параметры внешней среды с последующим включением информации о параметрах внешней среды в состав передаваемого видеосигнала.
3. Способ по п. 1, отличающийся тем, что передачу и прием управляющего сигнала, а также передачу и прием видеосигнала осуществляют на расстоянии, не превышающем пятидесяти километров.
4. Устройство мобильной видеорегистрации для реализации способа по п. 1, содержащее блок контроля объекта и блок управления, удаленные друг от друга, отличающееся тем, что блок управления включает в себя модуль передачи управляющего сигнала, управляющий модуль и модуль приема видеоинформации, а блок контроля объекта включает в себя модуль приема управляющего сигнала, модуль видеорегистрации объекта наблюдения, модуль регистрации местоположения объекта наблюдения, модуль передачи видеоинформации, а также модуль связи и навигации, при этом вход управляющего модуля связан с выходом модуля приема видеоинформации, выход управляющего модуля связан с входом модуля передачи управляющего сигнала, выход модуля приема управляющего сигнала связан с первым входом модуля связи и навигации, выход модуля видеорегистрации объекта наблюдения связан со вторым входом модуля связи и навигации, выход модуля регистрации местоположения объекта наблюдения связан с третьим входом модуля связи и навигации, выход модуля связи и навигации связан со входом модуля передачи видеоинформации.
5. Устройство по п. 4, отличающееся тем, что блок контроля объекта содержит дополнительно модуль регистрации параметров внешней среды, выход которого связан с входом модуля связи и навигации.
6. Устройство по п. 4, отличающееся тем, что расстояние между модулем передачи управляющего сигнала и приема управляющего сигнала, а также расстояние между модулем передачи видеоинформации и модулем приема видеоинформации не превышает пятидесяти километров.
| СПОСОБ КОНТРОЛЯ ВЫСОТЫ ПОДРЫВА БОЕВОЙ ЧАСТИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2550100C1 |
| СПОСОБ КОНТРОЛЯ РЕЗУЛЬТАТОВ ПОРАЖЕНИЯ ЦЕЛИ | 2004 |
|
RU2247312C1 |
| КОРРЕКТИРУЕМАЯ, САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 1999 |
|
RU2156954C1 |
| RU 2006130014 A, 20.01.2007. | |||

