Изобретение относится к транспортному машиностроению, в частности к внедорожной транспортной технике, и может быть использовано в качестве движителя в креслах-колясках для преодоления лестничных маршей общего пользования.
Известен шнековый движитель /см. пат. №2650301 (кл. B62D 57/036, A61G 5/06) от 04.07.2017/, содержащий цилиндрический ротор с многозаходным винтовым гребнем-вариаторным ремнем, в цилиндре которого между гребнями выполнены два ряда отверстий под витки упругогибких пружин, выступающих над цилиндрическим ротором больше, чем зубья вариаторных ремней.
При всех достоинствах известного шнекового движителя - прототипа последний может быть усовершенствован с целью расширения функциональных возможностей для движения по твердой поверхности (асфальт, бетон и т.п.) и для использования в качестве движителя в креслах-колясках для преодоления лестничных маршей общего пользования.
Заявленная цель достигается тем, что в шнековом движителе, содержащем цилиндрический ротор с многозаходным винтовым гребнем, в цилиндре которого между гребнями выполнены два ряда отверстий под витки упругогибких пружин, внутри ротора на рычаге, ориентированном на опорную плоскость движителя, установлен свободно вращающийся по поджатым изнутри ротора пружинам ролик с эластичным покрытием из вязкоупругого материала и осью вращения параллельной оси вращения цилиндрического ротора.
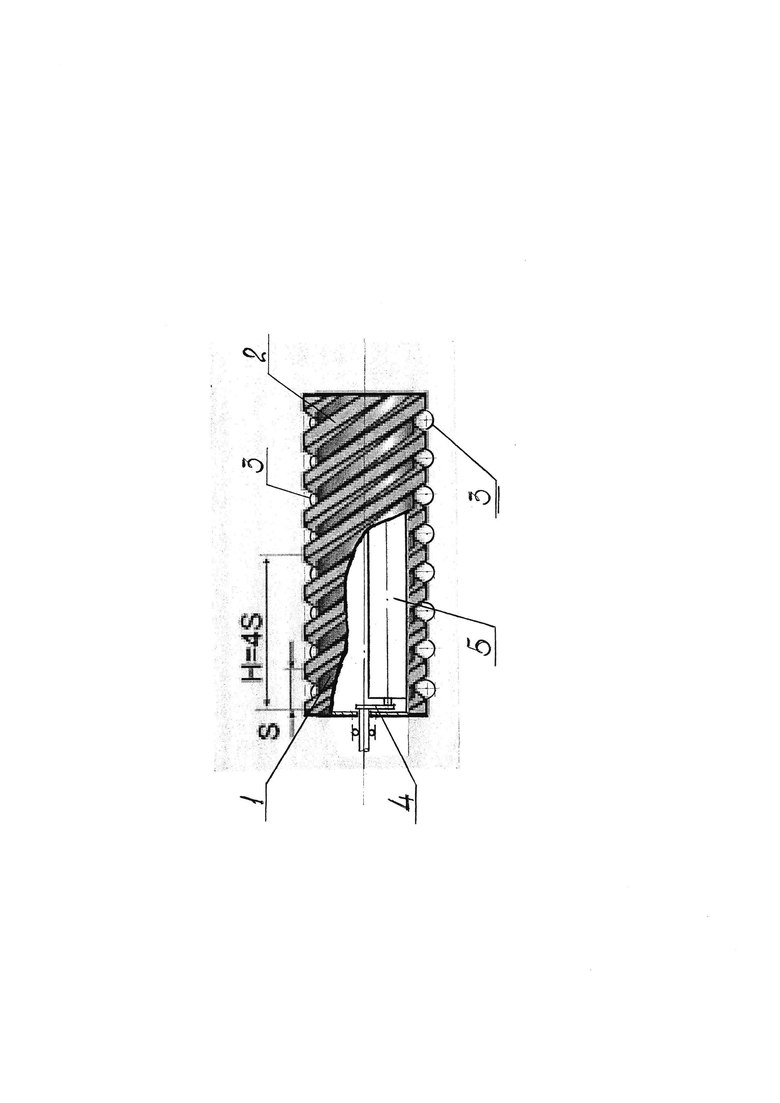
Предлагаемое изобретением техническое решение иллюстрируется фиг.
Предлагаемый изобретением шнековый движитель содержит цилиндрический ротор 1 с многозаходным (на чертеже показан четырехзаходный вариант исполнения) винтовым гребнем 2, в цилиндре которого между гребнями 2 выполнены два ряда отверстий (на фиг. не показаны) под витки упругогибких пружин 3. При этом внутри ротора 1 на рычаге 4, ориентированном на опорную плоскость движителя, установлен свободно вращающийся по поджатым изнутри ротора 1 пружинам 3 ролик 5 с эластичным покрытием из вязкоупругого материала и осью вращения параллельной оси вращения цилиндрического ротора 1.
Шнековый движитель предлагаемого исполнения за счет свободно вращающегося ролика 5 на рычаге 4, ориентированном на опорную плоскость движителя, обеспечивает на опорной плоскости движителя возвышение (выдвижением) упругогибких пружин 3 над цилиндрическим ротором 1 больше, чем винтовые гребни 2, что увеличивает сцепные свойства движителя, в том числе на лестничных маршах общего пользования, тем самым расширяя функциональные возможности шнекового движителя.
Кресло-коляска, снабженное предлагаемым шнековым движителем, приобретает увеличенную проходимость как на слабонесущих грунтах (песок, торф, снег и т.п.), так и на твердых поверхностях (асфальт, бетон и т.п.), включая лестничные марши общего пользования.
Кресло-коляска, снабженное предлагаемыми шнековыми движителями с бортов, способно двигаться вперед - назад при встречно или в разные стороны вращающихся с одинаковыми скоростями бортовых винтовых гребнях, способно поворачиваться при вращающихся в одну сторону с разными скоростями бортовых винтовых гребнях, т.е. способно повторять все движения кресел-колясок на колесном, гусеничном и колесно-гусеничном ходу.
Дополнительно кресло-коляска, снабженное предлагаемыми шнековыми движителями, способно двигаться вправо-влево при вращающихся в одну сторону с одинаковыми скоростями бортовых винтовых гребнях, тем самым расширяя функциональные возможности кресел-колясок для инвалидов.
Таким образом, предлагаемое техническое решение, по мнению заявителя, является новым, имеет изобретательский уровень и промышленно применимо.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шнековый движитель | 2017 |
|
RU2650301C1 |
| Шнековый движитель | 2017 |
|
RU2650297C1 |
| Шнековый движитель | 2018 |
|
RU2688401C1 |
| Шнековый движитель | 2018 |
|
RU2681405C1 |
| Шнековый движитель | 2017 |
|
RU2650289C1 |
| Шнековый движитель | 2020 |
|
RU2745163C1 |
| Шнековый движитель | 2018 |
|
RU2684544C1 |
| Шнековый движитель | 2020 |
|
RU2725341C1 |
| Шнековый движитель | 2018 |
|
RU2681406C1 |
| Шнековый движитель Н.П. Дядченко | 2020 |
|
RU2727413C1 |
Изобретение относится к шнековым движителям в креслах-колясках для преодоления лестничных маршей общего пользования. Шнековый движитель содержит цилиндрический ротор с многозаходным винтовым гребнем. В цилиндре между гребнями выполнены два ряда отверстий под витки упругогибких пружин. Внутри ротора на рычаге, ориентированном на опорную плоскость движителя, установлен свободно вращающийся по поджатым изнутри ротора пружинам ролик с эластичным покрытием из вязкоупругого материала и осью вращения параллельной оси вращения цилиндрического ротора. Достигается расширение функциональных возможностей шнекового движителя при движении по твердым поверхностям, а также при преодолении лестничных маршей общего пользования. 1 ил.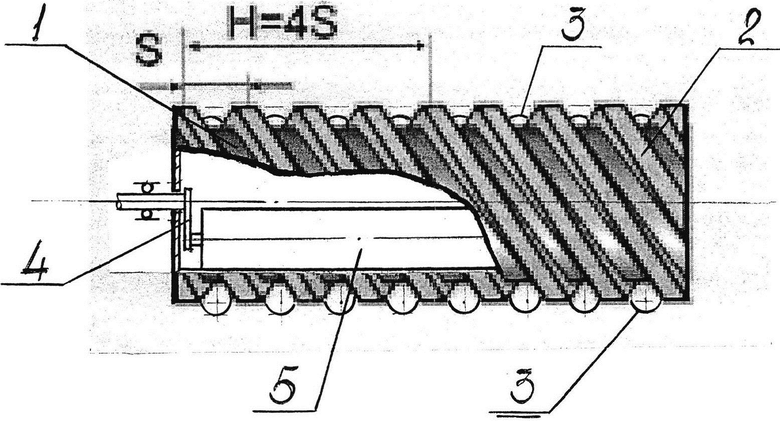
Шнековый движитель, содержащий цилиндрический ротор с многозаходным винтовым гребнем, в цилиндре которого между гребнями выполнены два ряда отверстий под витки упругогибких пружин, отличающийся тем, что внутри ротора на рычаге, ориентированном на опорную плоскость движителя, установлен свободно вращающийся по поджатым изнутри ротора пружинам ролик с эластичным покрытием из вязкоупругого материала и осью вращения, параллельной оси вращения цилиндрического ротора.
| RU 2003563 C1, 30.11.1993 | |||
| Шнековый движитель | 2017 |
|
RU2646772C1 |
| Винтовой движитель транспортного средства | 1978 |
|
SU751700A1 |
| Способ получения бентоса для корма рыб | 1958 |
|
SU122070A1 |
| CN 201005886 Y, 16.01.2008. | |||

