Данное изобретение относится к системе управления для крана с признаками ограничительной части пункта 1 формулы изобретения и к крану с такой системой управления краном.
Из уровня техники известно снабжение гидравлических погрузочных кранов выступающей шарнирной стрелой, так называемой консолью. С помощью такой дополнительной выступающей стрелы, которая монтируется на передней выдвижной стреле крана удлинения стрелы погрузочного крана, можно увеличивать радиус действия или, соответственно, высоту подъема погрузочного крана. Поскольку такая выступающая шарнирная стрела на удлинении стрелы крана прикладывает к крану дополнительный момент, то необходимо учитывать состояние вдвигания удлинения стрелы крана с выступающей шарнирной стрелой для оценки фактической нагрузки крана. При этом обычно с помощью устройства контролирования перегрузки распознается, находится ли самая передняя выдвижная стрела удлинения стрелы крана во вдвинутом состоянии или нет, и, исходя из этого, осуществляется переключение между двумя предельными значениями для рабочего параметра крана. На практике это может осуществляться с помощью одного из взаимодействующих с самой передней выдвижной стрелой крана переключателей с двумя положениями переключения, с помощью которых в систему управления краном могут задаваться предельные значения для рабочего параметра крана.
Недостатком такого управления краном является, с одной стороны, резкий переход от высокого предельного значения допустимого рабочего параметра крана на уменьшенное предельное значение рабочего параметра и, с другой стороны, менее эффективное использование потенциальных возможностей крана на основании задания предельных значений в зависимости от состояния вдвигания удлинения стрелы крана.
Задачей изобретения является создание системы управления краном или, соответственно, крана, в которых не возникают указанные выше недостатки.
Эта задача решена с помощью системы управления краном с признаками пункта 1 формулы изобретения и с помощью крана с такой системой управления краном. Предпочтительные варианты выполнения изобретения указаны в зависимых пунктах формулы изобретения.
За счет того, что предусмотрена возможность задания по меньшей мере для одного положения выдвигания между внесенными в память положениями выдвигания по меньшей мере одной выдвижной стрелы крана, лежащего по величине между внесенными в память величинами предельного значения, задание предельного значения можно осуществлять более точно согласованно с фактическим положением выдвигания выдвижной стрелы крана. Возможно также задание предельного значения, пропорционального по меньшей мере на некоторых участках моментальному положению выдвигания. Так, например, при частично выдвинутой самой передней выдвижной стреле крана удлинения стрелы крана можно более эффективно использовать кран, поскольку при необходимости может задаваться для такого выдвинутого положения предельное значение, при котором процесс подъема можно выполнять еще в пределах нагрузки, которая при учете лишь состояния вдвигания выдвижной стрелы крана уже представляла бы перегрузку.
При этом предпочтительно предусмотрено, что система управления краном имеет датчик угла сгибания для измерения второго угла сгибания удлинения стрелы крана в вертикальной плоскости, в память занесены по меньшей мере для двух углов сгибания удлинения стрелы крана величины для максимально допустимых предельных значений, и задание предельного значения осуществляется с помощью устройства контролирования перегрузки в зависимости от угла сгибания. За счет этого можно дополнительно к положению выдвигания удлинения стрелы крана учитывать при задании предельного значения также наклон удлинения стрелы крана и тем самым получающееся для выступающей стрелы перемещение. Таким образом, может быть оптимизировано задание предельных значений нагрузки крана для различных диапазонов угла сгибания, и тем самым обеспечиваться возможность эффективного использования крана.
Согласно одному предпочтительному варианту выполнения может быть предусмотрена возможность задания по меньшей мере для одного другого угла сгибания между внесенными в память углами сгибания удлинения стрелы крана предельного значения, лежащего по величине между внесенными в память величинами. За счет этого может быть достигнуто, что задание предельных значений для нескольких диапазонов угла сгибания или, соответственно положений угла сгибания, является оптимальным, и тем самым может выполняться с лучшим согласованием с моментальной геометрической формой крана.
Согласно другому предпочтительному варианту выполнения может быть предусмотрено, что выступающая стрела крана имеет по меньшей мере две стрелы крана, при этом две стрелы крана могут принимать относительно друг друга два различных положения выдвигания, и при этом система управления краном имеет другой датчик положения выдвигания для измерения положения выдвигания стрел крана выступающей стрелы, в память внесены величины для максимально допустимых предельных значений по меньшей мере для двух положений выдвигания стрел выступающей стрелы, предпочтительно по существу для полностью вдвинутого положения стрел крана выступающей стрелы и по существу для полностью выдвинутого положения стрел крана выступающей стрелы, и задание предельного значения с помощью устройства контролирования перегрузки осуществляется в зависимости от измеренного положения выдвигания выступающей стрелы. При таком расположении другой выступающей стрелы на расположенном на удлинении стрелы первой выступающей стрелы, т.е. при так называемой «консоль в консоли»-конфигурации, можно за счет измерения и учета положения выдвигания первой выступающей стрелы осуществлять задание предельного значения с помощью устройства контролирования перегрузки с лучшим согласованием с положением выдвигания или, соответственно с диапазоном положений выдвигания выступающей стрелы.
Предпочтительно может быть предусмотрено, что по меньшей мере для одного другого положения выдвигания между занесенными в память положениями выдвигания стрел крана выступающей стрелы предусмотрена возможность задания предельного значения, лежащего по величине между внесенными в память величинами. За счет этого можно осуществлять задание предельного значения с более точным согласованием с фактическим положением выдвигания выступающей стрелы.
Может быть предусмотрено, что система управления краном имеет другой датчик угла сгибания для измерения третьего угла сгибания выступающей стрелы в вертикальной плоскости, в память внесены по меньшей мере для двух углов сгибания выступающей стрелы величины для максимально допустимых предельных значений, и задание предельного значения осуществляется с помощью устройства контролирования перегрузки в зависимости от измеренного угла сгибания выступающей стрелы. Таким образом, задание предельного значения может осуществляться, например, также в зависимости от диапазона угла сгибания или, соответственно положения угла сгибания выступающей стрелы.
Предпочтительно, когда по меньшей мере для одного другого угла сгибания выступающей стрелы между занесенными в память углами сгибания выступающей стрелы предусмотрена возможность задания предельного значения, лежащего по величине между внесенными в память величинами. Таким образом, задание предельного значения может осуществляться с более точным согласованием с моментальным положением выступающей стрелы или, соответственно с геометрической формой крана.
Предпочтительно, что на насадочном плече под четвертым углом сгибания расположена другая выступающая стрела, предпочтительно другая шарнирная стрела. За счет этого могут быть расширены функциональные возможности, радиус действия и зона использования крана.
Может быть предусмотрено, что другая выступающая стрела имеет по меньшей мере две стрелы крана, при этом две стрелы крана могут принимать относительно друг друга различные положения выдвигания, и при этом система управления краном имеет другой датчик положения выдвигания для измерения положения выдвигания стрел крана другой выступающей стрелы, и при этом в память внесены по меньшей мере для двух положений выдвигания стрел крана другой выступающей стрелы, предпочтительно по существу для полностью вдвинутого положения стрел крана другой выступающей стрелы и по существу для полностью выдвинутого положения стрел крана другой выступающей стрелы, величины для максимально допустимых предельных значений, и задание предельного значения осуществляется с помощью устройства контролирования перегрузки в зависимости от измеренного положения выдвигания стрел крана другой выступающей стрелы. Таким образом, также при снабжении крана второй выступающей стрелой можно задавать согласованное с его положением выдвигания предельное значение для рабочего параметра.
Предпочтительно, что по меньшей мере для одного другого положения выдвигания между внесенными в память положениями выдвигания стрел крана выступающей стрелы предусмотрена возможность задания предельного значения, лежащего по величине между внесенными в память величинами. Таким образом, можно задавать, например, по меньшей мере на некоторых участках пропорциональное моментальному положению выдвигания предельное значение.
Предпочтительно, что система управления краном имеет другой датчик угла сгибания для измерения четвертого угла сгибания другой выступающей стрелы в вертикальной плоскости, в память внесены по меньшей мере для двух углов сгибания другой выступающей стрелы величины для максимально допустимых предельных значений, и задание предельного значения с помощью устройства контролирования перегрузки осуществляется в зависимости от измеренного угла сгибания другой выступающей стрелы. За счет этого можно с учетом положения сгибания включать, например, эффективное выдвижение другой выступающей стрелы в задание предельного значения.
Предпочтительно, что по меньшей мере для одного другого угла сгибания другой выступающей стрелы между внесенными в память углами сгибания другой выступающей стрелы предусмотрена возможность задания предельного значения, лежащего по величине между внесенными величинами. За счет этого можно задавать согласованное с моментальным положением сгибания выступающей стрелы предельное значение.
Предпочтительно, что для различных выполнений выступающих стрел в память внесены соответствующие специфичные величины предельных значений. Для имеющих различные размеры и различно снаряженных выступающих стрел в память могут быть внесены соответствующие специальные для этого выполнения предельные значения. За счет этого обеспечивается оптимальное, согласованное с соответствующим оборудованием крана использование подъемного потенциала крана с помощью системы управления краном.
Особенно предпочтительно, что положение выдвигания стрел крана измеряется с помощью приспособления для измерения пути. За счет этого можно подавать в систему управления краном для каждого положения выдвигания стрел крана соответствующее этому положению выдвигания значение. С помощью подходящего приспособления измерения пути можно достигать разрешения любой точности фактического положения выдвигания. При этом это может относиться к положению выдвигания удлинения стрелы крана и/или к положению выдвигания выступающей стрелы.
Предпочтительно предусмотрено, что рабочий параметр является давлением в гидравлическом цилиндре на стреле крана. Поскольку давление в гидравлическом цилиндре или, соответственно, в цилиндре сгибания непосредственно соответствует приложенной к крану нагрузке, то этот рабочий параметр является особенно характеристическим для моментальной загрузки крана. При этом возможно, что измеряется гидравлическое давление в главном цилиндре или же нескольких гидравлических цилиндрах крана, и с помощью устройства контролирования перегрузки для этого задается предельное значение или, соответственно, предельные значения.
Предпочтительно может быть предусмотрено, что предусмотрена возможность определения предельного значения по меньшей мере для одного другого положения выдвигания или по меньшей мере для одного другого угла сгибания посредством интерполяции между внесенными в память величинами. За счет этого можно задавать лежащее по величине между внесенными величинами предельное значение по меньшей мере для одного другого положения выдвигания или по меньшей мере одного другого угла сгибания, для которых для этого диапазона в память не внесена специфичная величина. Поэтому обеспечивается возможность задания для любых положений выдвигания или, соответственно любых положений угла сгибания, согласованного с этим получающимся положением крана предельного значения для рабочего параметра. Интерполяция может содержать также определение лежащего вне диапазона внесенных величин предельного значения, поскольку это содержит использование внесенных значений в качестве опорных мест.
Предпочтительно может быть предусмотрено, что интерполяция осуществляется линейно. За счет этого можно определять другое предельное значение с небольшим объемом вычисления. При этом ход изменения может быть по меньшей мере на некоторых участках непрерывным или монотонно падающим.
Особенно предпочтительно может быть предусмотрено, что интерполяция осуществляется полиномно. За счет этого обеспечивается возможность по существу любого хода изменения задания предельного значения в зависимости от положения выдвигания или, соответственно угла сгибания. При этом ход изменения может быть по меньшей мере на некоторых участках непрерывным или монотонно падающим.
Предпочтительно может быть предусмотрено, что с помощью устройства контролирования перегрузки обеспечивается возможность ограничения по меньшей мере одной функции управления системы управления краном в зависимости от отношения измеренного рабочего параметра к предельному значению для рабочего параметра. За счет этого можно исключать или, соответственно, предотвращать с помощью системы управления краном состояния перегрузки. При этом ограничение функции управления может предотвращать превышение или не достижение предельного значения. Это может содержать, например, ограничение максимально допустимого давления в гидравлическом цилиндре, или же максимально допустимой скорости изменения рабочего параметра крана.
Согласно изобретению, предлагается также кран с системой управления краном в соответствии с одним из указанных вариантов выполнения. Такой самоходный кран, который выполнен в качестве погрузочного крана или, соответственно крана с шарнирными стрелами, для транспортного средства, характеризуется оптимальным использованием подъемного потенциала при одновременно высокой защите от состояний перегрузки.
Другие подробности и преимущества данного изобретения поясняются более детально в приведенном ниже описании примеров выполнения со ссылками на прилагаемые чертежи, на которых изображено:
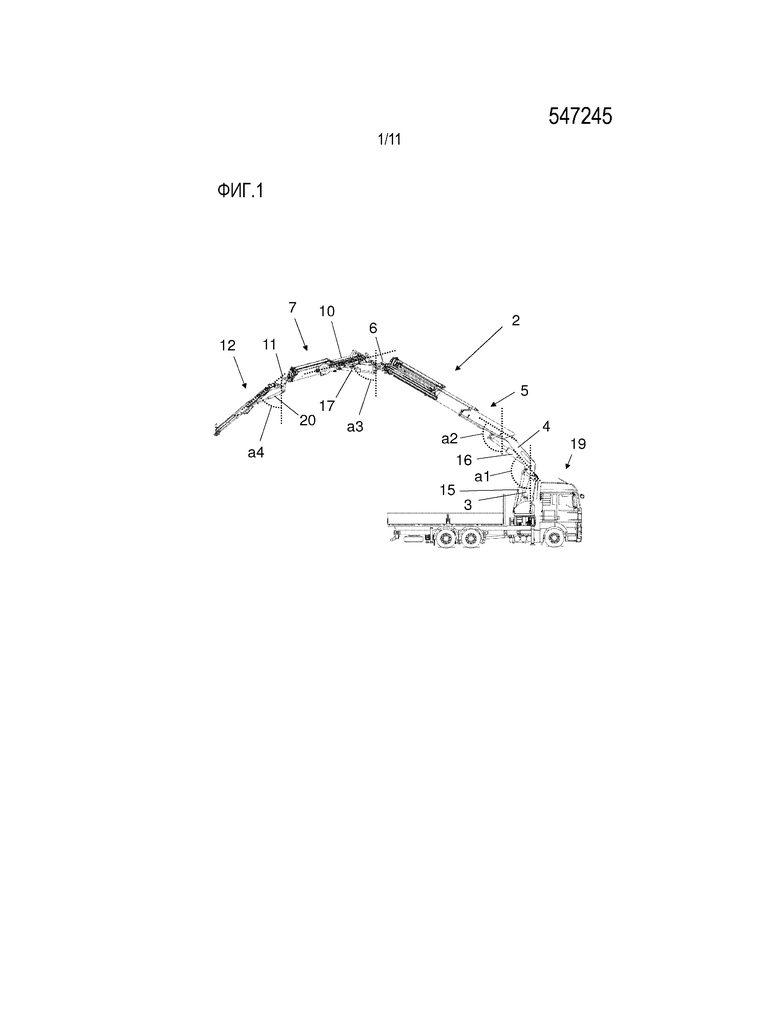
фиг. 1 - смонтированный на транспортном средстве самоходный кран на виде сбоку;
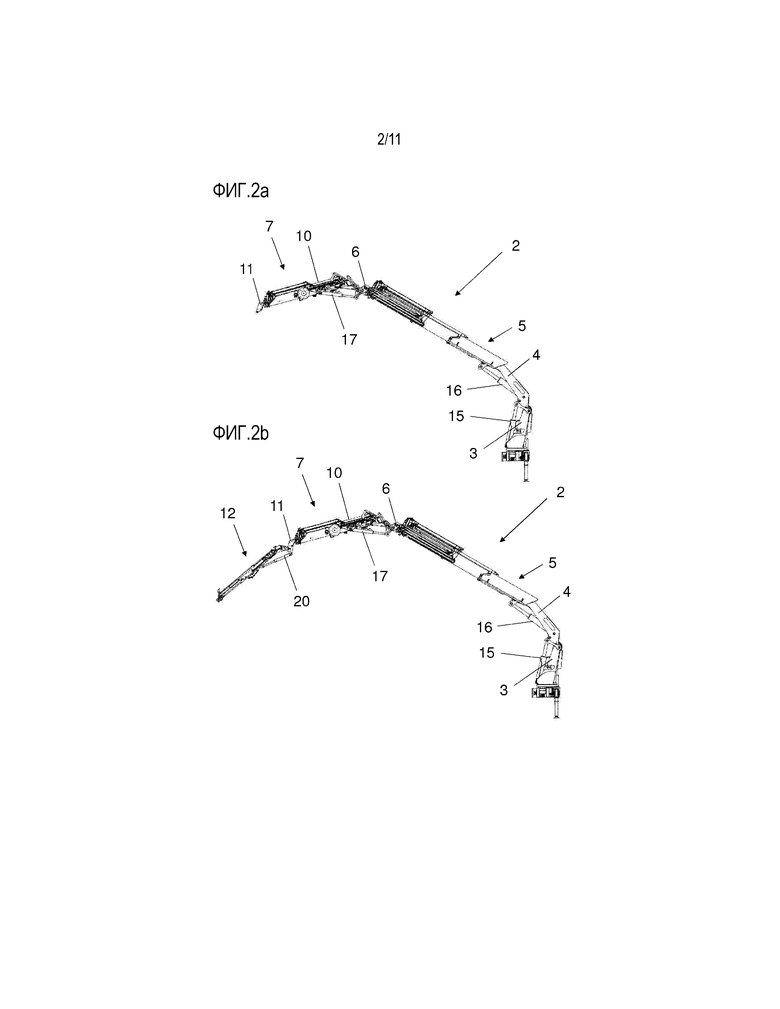
фиг. 2а и 2b - соответствующий вариант выполнения погрузочного крана на виде сбоку;
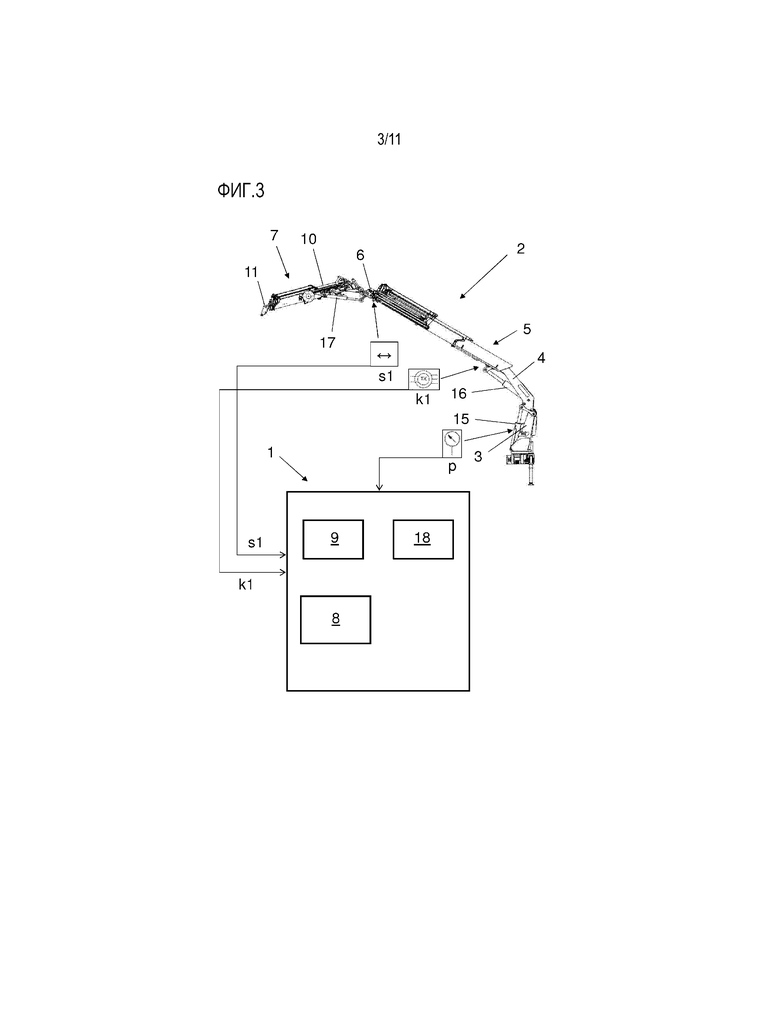
фиг. 3 - самоходный кран на виде сбоку и схема системы управления краном с датчиками крана;
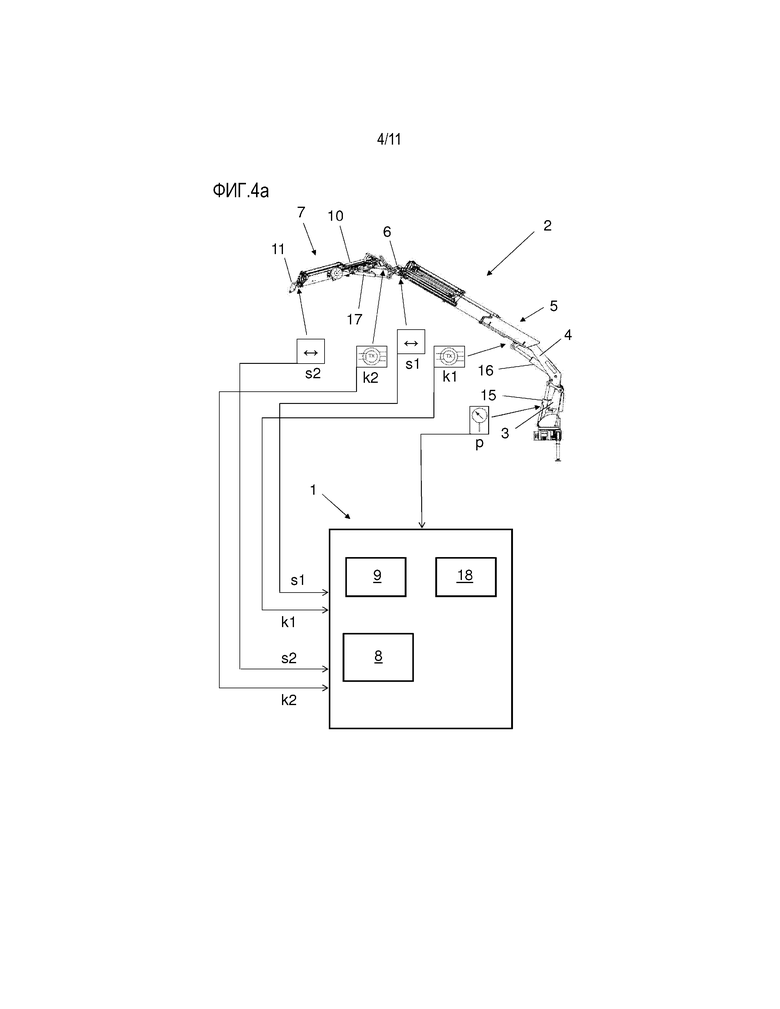
фиг. 4а-4с - различные варианты выполнения погрузочного крана на виде сбоку со схемой соответствующей системы управления краном с датчиками крана;
фиг. 5а-5с - погрузочный кран с различными положениями выдвигания удлинения стрелы крана;
фиг. 6а и 6b - самоходный кран в различных положениях выдвигания удлинения стрелы крана с системой управления краном с датчиками крана;
фиг. 7а-7с - погрузочный кран с различными положениями угла сгибания удлинения стрелы крана;
фиг. 8а и 8b - самоходный кран в различных положениях угла сгибания удлинения стрелы крана с системой управления краном с датчиками крана; и
фиг. 9а и 9b - другой вариант выполнения самоходного крана с системой управления краном с датчиками крана.
На фиг. 1 показано транспортное средство 19 с монтированным на нем краном 2, при этом кран 2 имеет первую, часто называемую колонной крана и, например, поворотную вокруг вертикальной оси стрелу 3 крана, расположенную на нем под первым шарнирным углом а1, часто называемую подъемной стрелой стрелу 4 крана, расположенное на нем под вторым шарнирным углом а2 удлинение 5 стрелы крана с несколькими выдвижными стрелами, расположенное на самой передней выдвижной стреле 6 крана удлинения 5 стрелы крана выступающую стрелу 7 с внутренней стрелой 10 крана и наружной стрелой 11 крана, и расположенную на нем под четвертым шарнирным углом а4 вторую выступающую стрелу 12. Для поворота второй стрелы 4 крана относительно первой стрелы 3 крана в вертикальной плоскости предусмотрен гидравлический цилиндр 15. Для поворота удлинения 5 стрелы крана относительно второй стрелы 4 крана в вертикальной плоскости предусмотрен гидравлический цилиндр 16. Для обеспечения возможности дальнейшего поворота первой выступающей стрелы 7 относительно удлинения 5 стрелы крана в вертикальной плоскости предусмотрен гидравлический цилиндр 17. Наконец, аналогично этому предусмотрен гидравлический цилиндр 21 для поворота второй выступающей стрелы 12 в вертикальной плоскости относительно первой выступающей стрелы 7.
На фиг. 2а показан более детально вариант выполнения крана 2 с выступающей стрелой 7.
На фиг. 2b показан более детально вариант выполнения крана 2 с первой выступающей стрелой 7 и второй выступающей стрелой 12.
На фиг. 3 показан вариант выполнения крана 2 с выступающей стрелой 7 и системой 1 управления краном с соответствующими датчиками крана. При этом система 1 управления краном имеет датчик s1 положения выдвигания для измерения положения выдвигания самой передней выдвижной стрелы 6 удлинения 5 стрелы крана, датчик k1 угла сгибания для измерения положения угла сгибания удлинения 5 стрелы крана в вертикальной плоскости, а также в этом варианте выполнения также датчик р давления для измерения гидравлического давления в гидравлическом цилиндре 15 крана 2. Измеряемые датчиками значения подаются через соответствующие соединения в систему 1 управления краном, такие как кабельные соединения или беспроводные соединения. Система 1 управления краном имеет дополнительно память 8 для занесения предельных значений по меньшей мере для одного характеризующего моментальную нагрузку крана рабочего параметра крана 2, устройство 9 контролирования перегрузки, предназначенное для задания в систему управления краном предельного значения по меньшей мере одного рабочего параметра крана 2, и вычислительный блок 18. Устройство 9 контролирования перегрузки системы 1 управления краном посредством задания предельного значения может ограничивать одну или несколько функций крана 2 так, что может предотвращаться превышение или же не достижение рабочего параметра крана, например, гидравлического давления в одном из гидравлических цилиндров 15, 16, 17, 21, положения выдвигания или же положения угла сгибания. При этом задание предельного значения может осуществляться в зависимости от измеренного датчиком s1 положения выдвигания удлинения 5 стрелы крана и/или от измеренного датчиком k1 положения угла сгибания удлинения 5 стрелы крана, а также в зависимости от измеренного датчиком s2 положения выдвигания выступающей стрелы 7 и/или от измеренного с помощью датчика k2 положения угла сгибания выступающей стрелы 7.
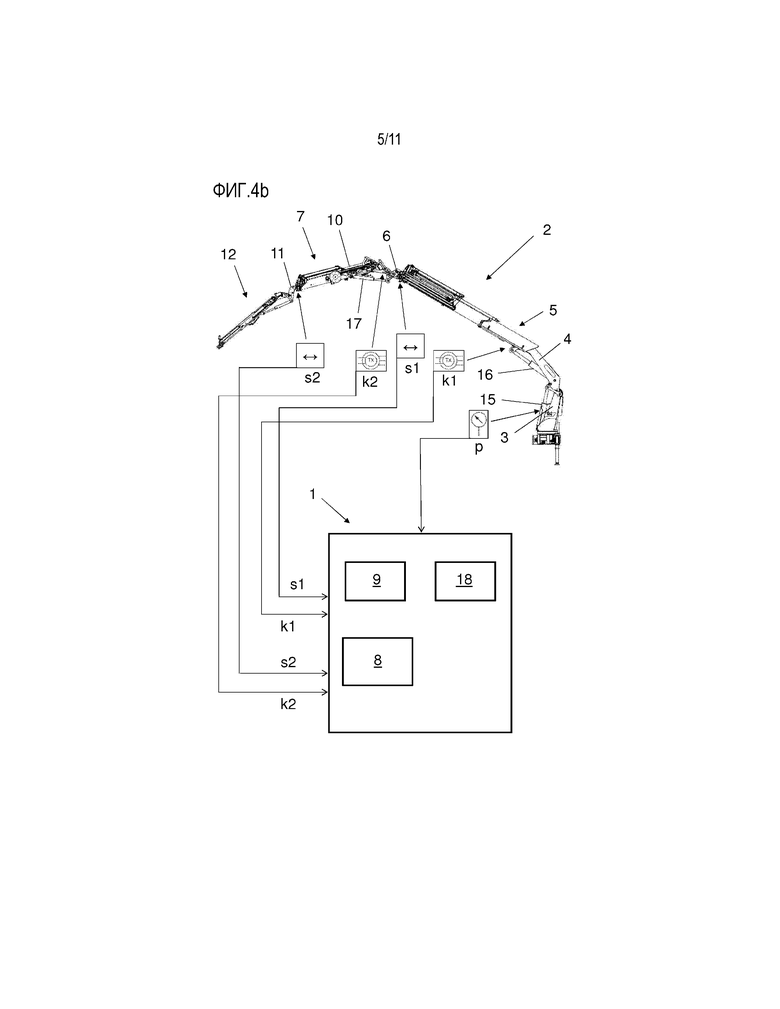
На фиг. 4а показан вариант выполнения крана 2 с первой выступающей стрелой 7 и схематично изображенной системой 1 управления краном с соответствующими датчиками крана. При этом датчики крана содержат, как и в показанном на фиг. 3 примере выполнения, сначала датчик s1 положения выдвигания для измерения положения выдвигания удлинения 5 стрелы крана и датчик k1 угла сгибания для измерения положения угла сгибания удлинения 5 стрелы крана в вертикальной плоскости. Кроме того, датчики крана содержат в показанном на фиг. 4 варианте выполнения крана 2 второй датчик s2 положения выдвигания для измерения положения выдвигания самой наружной стрелы 11 крана первой выступающей стрелы 7 и второй датчик k2 угла сгибания для измерения положения угла сгибания первой выступающей стрелы 7 в вертикальной плоскости. В показанном варианте выполнения датчики крана содержат дополнительно датчик р давления для измерения гидравлического давления в главном цилиндре 15. Измеряемые датчиками крана данные подаются в устройство 1 управления краном через подходящие соединения. Там данные датчиков могут сравниваться с занесенными в память 8 величинами предельных значений для характеризующих моментальную нагрузку крана, соответствующих данным датчиков рабочих параметров крана 2 с помощью вычислительного блока 18, и при необходимости с помощью устройства 9 контролирования перегрузки задаются соответствующие предельные значения для рабочих параметров в зависимости от измеренных датчиками данных, т.е., например, в зависимости от измеренных с помощью датчиков k1, k2 углов а2, а3 сгибания удлинения 5 стрелы крана и выступающей стрелы 7, а также соответствующего положения выдвигания выдвижной стрелы 6 и стрел 10, 11 крана выступающей стрелы 7.
На фиг. 4b показан кран 2 с расположенной на нем выступающей стрелой 7 и другой выступающей стрелой 12.
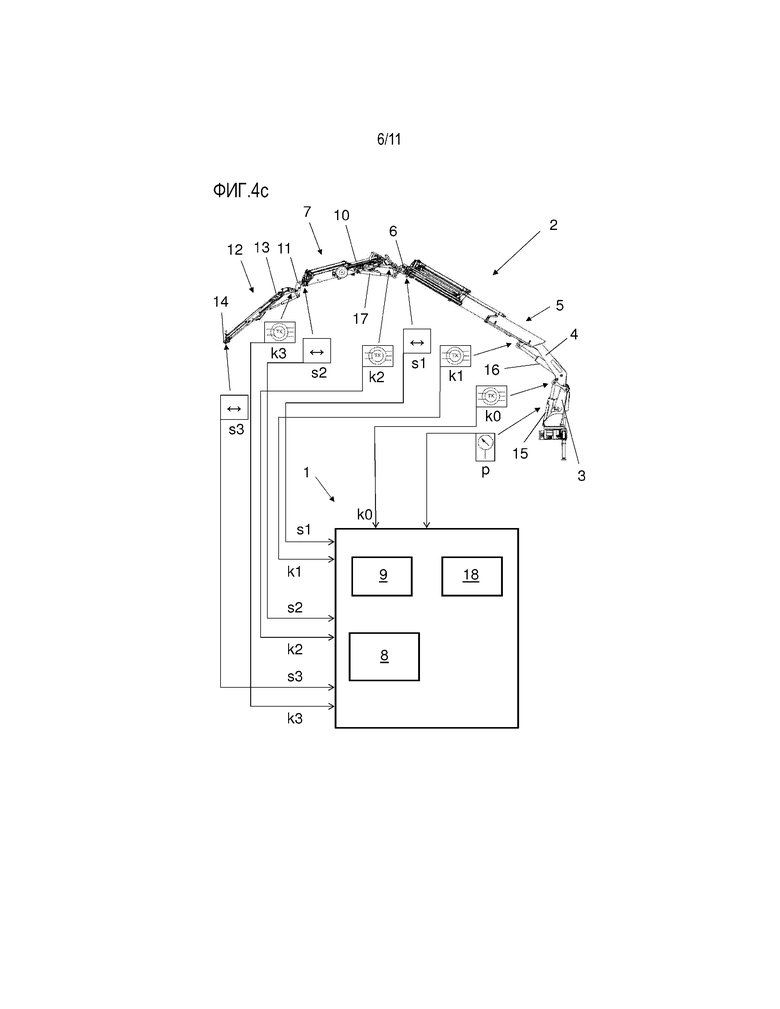
На фиг. 4с показан вариант выполнения крана 2 с первой выступающей стрелой 7, расположенной на ней другой выступающей стрелой 12, и схематично изображенной системой 1 управления краном с соответствующими датчиками крана. Другая выступающая стрела 12 имеет две стрелы 13, 14 крана, которые могут принимать различные положения выдвигания относительно друг друга. При этом датчики крана содержат, как и в показанном на фиг. 4а примере выполнения, датчик s1 положения выдвигания и датчик s2 положения выдвигания для измерения положения выдвигания удлинения 5 стрелы крана и для измерения положения выдвигания стрел 10, 11 крана выступающей стрелы. Кроме того, датчики крана содержат датчик k1 угла сгибания и датчик k2 угла сгибания для измерения положения угла сгибания удлинения 5 стрелы крана в вертикальной плоскости и для измерения положения угла сгибания выступающей стрелы 7 в вертикальной плоскости. Кроме того, в показанном на фиг. 4с варианте выполнения крана 2 датчики крана содержат третий датчик s3 положения выдвигания для измерения положения выдвигания стрел 13, 14 крана другой выступающей стрелы 12, и третий датчик k3 угла сгибания для измерения положения угла сгибания другой выступающей стрелы 12 в вертикальной плоскости. Дополнительно к этому, в показанном на фиг. 4с варианте выполнения кран 2 содержит датчик k0 угла сгибания для измерения первого шарнирного угла а1, который образует вторая стрела крана 4 с вертикалью. Дополнительно к этому, в показанном варианте выполнения датчики крана содержат датчик р давления для измерения гидравлического давления в главном цилиндре 15. Измеренные датчиками крана данные подаются в систему 1 управления краном через подходящие соединения. Там данные датчиков могут сравниваться с занесенными в память 8 величинами предельных значений для характеризующих моментальную нагрузку крана, соответствующих данным датчиков рабочих параметров крана 2 с помощью вычислительного блока 18, и при необходимости с помощью устройства 9 контролирования перегрузки задаются соответствующие предельные значения для рабочих параметров в зависимости от измеренных датчиками данных. Таким образом, в показанном примере выполнения задание предельного значения может осуществляться, например, в зависимости от измеренных с помощью датчиков k1, k2, k3 углов а2, а3, а4 сгибания удлинения 5 стрелы крана, выступающей стрелы 7 и другой выступающей стрелы 12, а также соответствующего положения выдвигания выдвижной стрелы 6, стрел 10, 11 крана выступающей стрелы 7 и стрел 13, 14 крана другой выступающей стрелы 12. Задание предельного значения по меньшей мере для одного рабочего параметра крана 2 может осуществляться дополнительно в зависимости от измеренного с помощью датчика k0 первого угла а1 сгибания.
В отличие от показанного на фигуре, стрела крана 4 может быть выполнена также телескопической. Такая телескопически выполненная вторая стрела 4 крана может в этом случае выполнять функцию удлинения 5 стрелы крана и на ней может быть расположена выступающая стрела 7. В качестве альтернативного решения возможно также, что удлинение 5 стрелы крана расположено непосредственно на первой стреле 3 крана. При этом возможно согласование с этим выполнением датчиков крана и системы 1 управления краном.
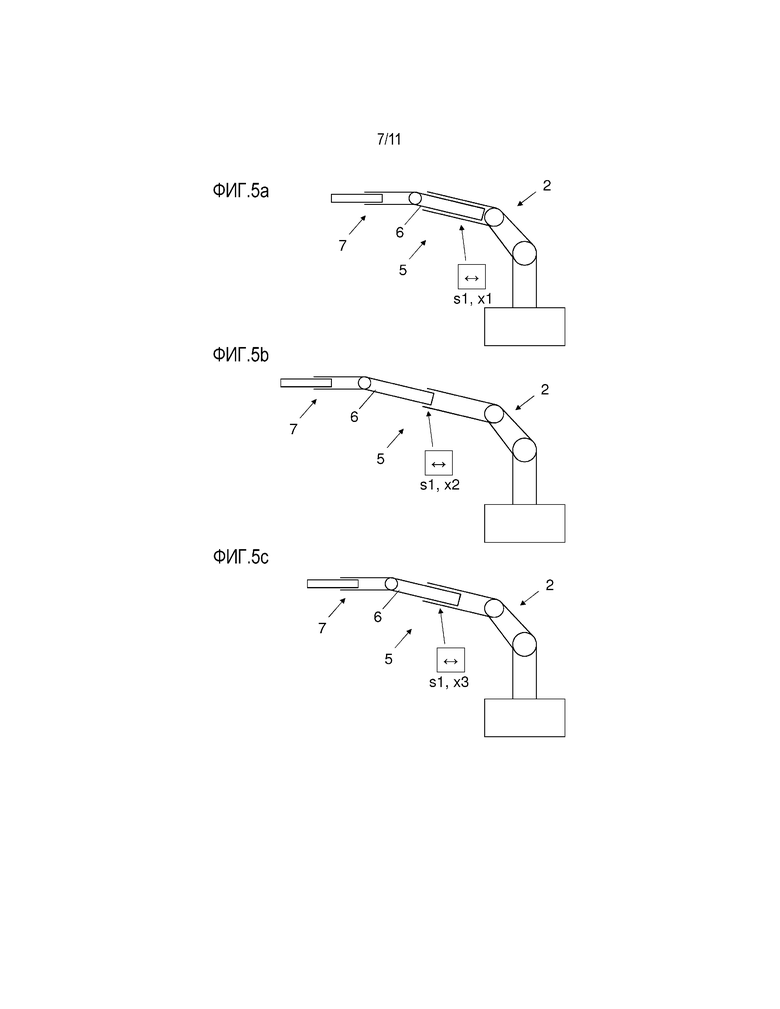
На фиг. 5а-5с показан кран с удлинением 5 стрелы крана с выдвижной стрелой 6 крана и закрепленной на ней выступающей стрелой 7 с различными положениями х1, х2, х3 выдвигания выдвижной стрелы 6. При этом на фиг. 5а показано по существу полностью вдвинутое положение х1 выдвигания выдвижной стрелы 6 удлинения 5 стрелы крана. В противоположность этому, на фиг. 5b показано по существу полностью выдвинутое положение х2 выдвигания выдвижной стрелы 6 удлинения 5 стрелы крана. На фиг. 5с показано положение х3 выдвигания выдвижной стрелы 6 удлинения 5 стрелы крана, которое находится между полностью вдвинутым и полностью выдвинутым положением выдвигания. При этом положение выдвигания выдвижной стрелы 6 удлинения 5 стрелы крана измеряется датчиком s1 положения выдвигания.
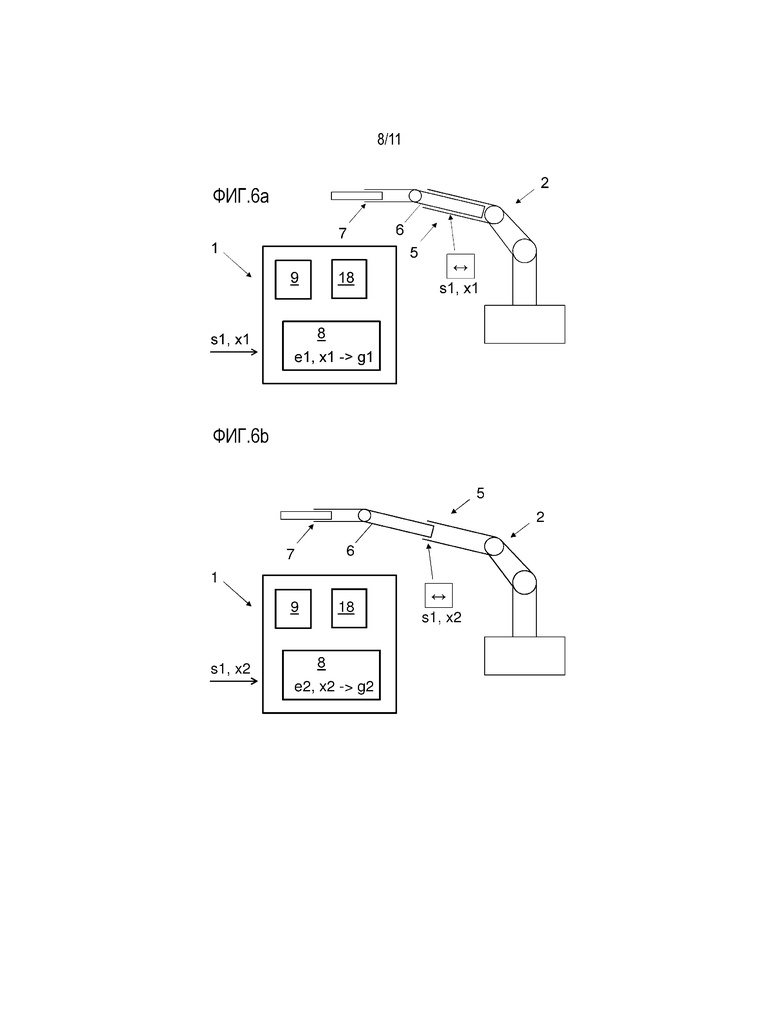
На фиг. 6а схематично показан кран 2 с удлинением 5 стрелы крана и выступающей стрелой 7. При этом выдвижная стрела 6 удлинения 5 стрелы крана показано по существу в полностью вдвинутом положении х1 выдвигания, которое измеряется датчиком s1 положения выдвигания. В схематично изображенную систему 1 управления краном из датчика s1 положения выдвигания подается соответствующее измерительное значение положения х1 выдвигания. В память 8 системы 1 управления краном внесено для этого положения х1 выдвигания соответствующая величина е1 с согласованным предельным значением g1. Это предельное значение g1, которое может отображать, например, предельное давление для не изображенного здесь гидравлического цилиндра, может задаваться с помощью устройства 9 контролирования перегрузки в качестве предельного значения для рабочего параметра крана 2. Аналогичным образом, на фиг. 6b показан кран 2 с удлинением 5 стрелы крана и выступающей стрелой 7, при этом выдвижная стрела 6 удлинения 5 стрелы крана находится по существу в полностью выдвинутом положении х2 выдвигания. Измеренное датчиком s1 положения выдвигания измерительное значение положения х2 выдвигания подается в систему 1 управления краном. Для этого положения х2 выдвигания в память 8 внесена величина е2, с которой согласовано предельное значение g2.
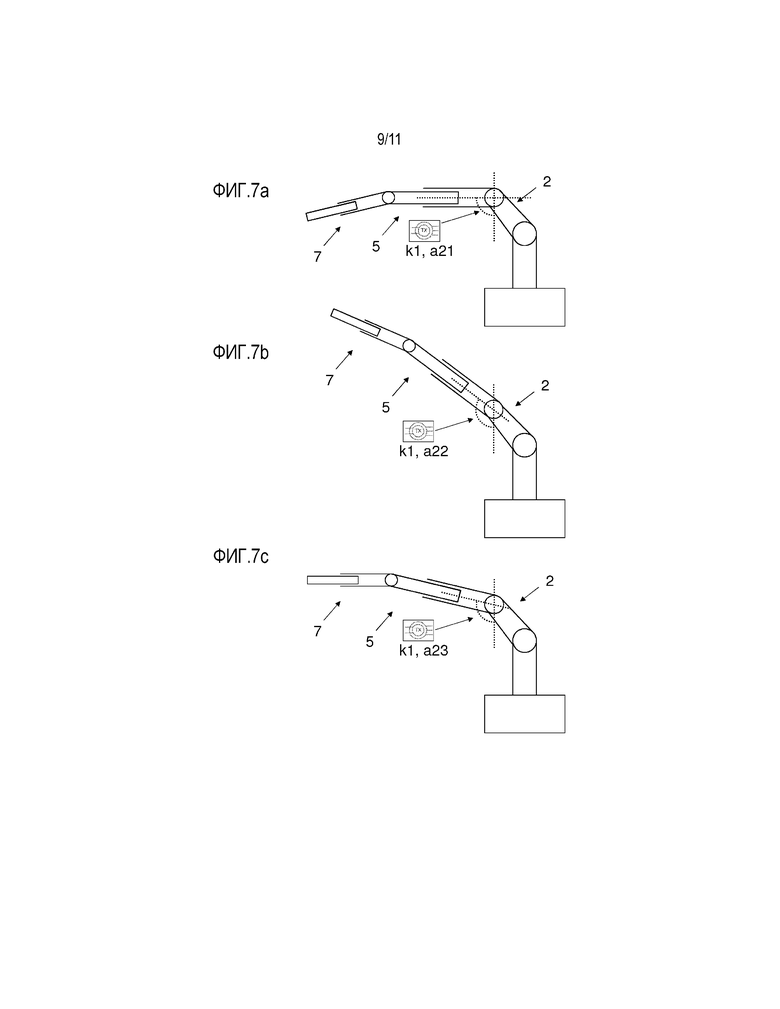
На фиг. 7а-7с схематично показан кран 2 с удлинением 5 стрелы крана и выступающей стрелой 7, при этом изображения отличаются различным углом а21, а22, а23 сгибания удлинения 5 стрелы крана в вертикальной плоскости. Например, на фиг. 7а показано положение крана 2, в котором удлинение 5 стрелы крана показано по существу в горизонтальном положении. При этом соответствующий угол а21 сгибания измеряется датчиком k1 угла сгибания. На фиг. 7b показано положение крана 2, в котором удлинение 5 стрелы крана показано над горизонталью. Соответствующий угол а22 сгибания измеряется датчиком k1 угла сгибания. На фиг. 7с кран показан в положении, в котором удлинение 5 стрелы крана расположено под углом а23 сгибания, который находится между показанными на фиг. 7а и 7b положениями угла сгибания.
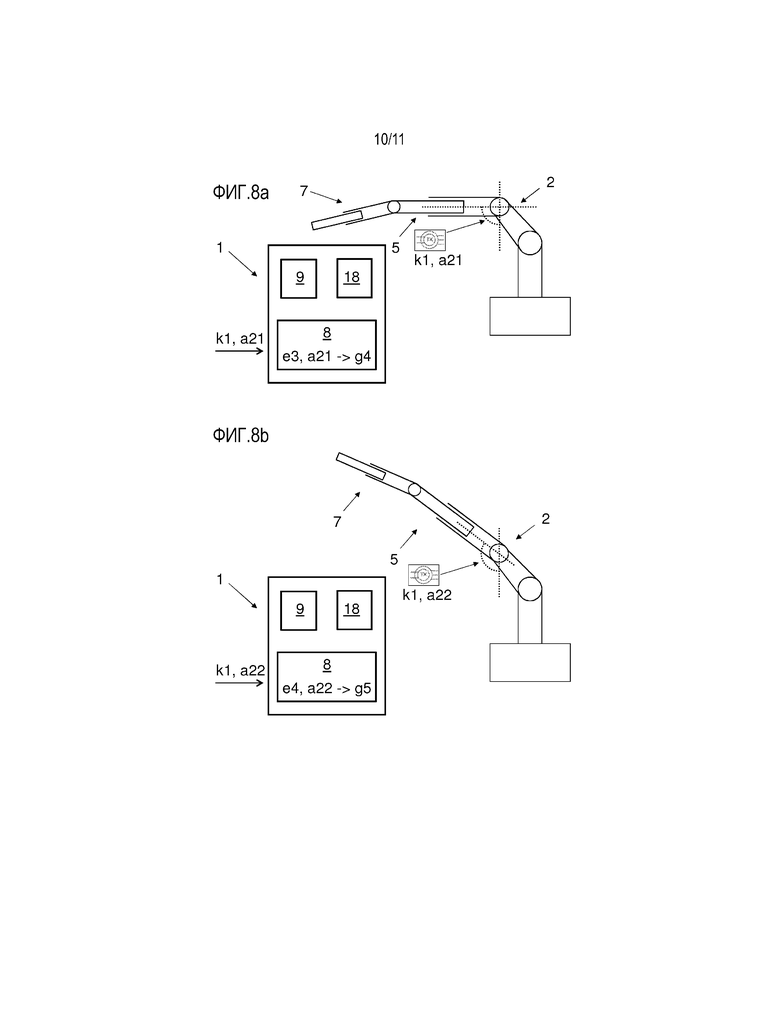
На фиг. 8а схематично показан кран 2 с удлинением 5 стрелы крана и расположенной на ней выступающей стрелой 7. При этом удлинение 5 стрелы крана расположено ниже измеренного датчиком k1 угла а21 сгибания, который в показанном варианте выполнения соответствует по существу горизонтально расположенному удлинению 5 стрелы крана. Измеренное с помощью датчика k1 измерительное значение угла а21 сгибания подается в систему 1 управления краном, при этом в память 8 системы 1 управления краном занесена соответствующая углу а21 сгибания величина е3, с которой согласовано предельное значение g4. Это предельное значение g4 может задаваться с помощью устройства 9 контролирования перегрузки в систему 1 управления краном в качестве предельного значения для рабочего параметра крана 2.
Аналогично фиг. 8а, на фиг. 8b показан кран 2 в другом положении угла а22 сгибания удлинением 5 стрелы крана. Измеренное с помощью датчика k1 измерительное значение угла а22 сгибания подается в систему 1 управления краном, при этом в ее память 8 внесена для этого угла а22 сгибания величина е4, с которой согласовано предельное значение g5.
Ниже в качестве примера приводится пояснение задания другого предельного значения для соответствующего лежащего между величинами в памяти 8 положениями выдвигания и для соответствующего лежащего между величинами в памяти 8 положениями угла сгибания на основе удлинения 5 стрелы крана. Понятно, что это применимо также для других стрел крана или, соответственно, выдвижных стрел или выступающих стрел крана 2.
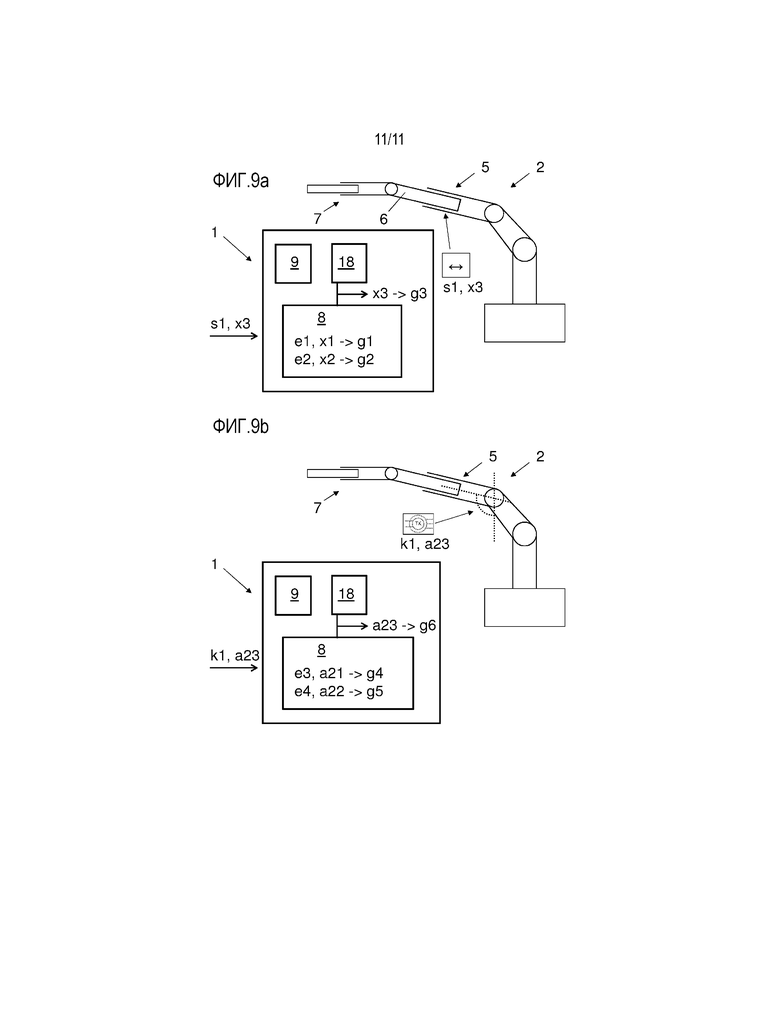
На фиг. 9а и 9b показано положение схематично изображенного крана 2, для которого согласованные положение выдвигания или, соответственно положение сгибания, лежат между соответствующими, занесенными в память 8 системы 1 управления краном значениями. А именно, на фиг. 9а кран 2 показан с удлинением 5 стрелы крана и выступающей стрелой 7, при этом выдвижная стрела 6 удлинения 5 стрелы крана находится в соответствующем частично выдвинутому или, соответственно, вдвинутому положению положении х3 выдвигания. Измеренное датчиком s1 значение положения х3 выдвигания подается в систему 1 управления краном. В системе 1 управления краном в память 8 внесены для двух положений х1 и х2 выдвигания величины е1, е2 с согласованными предельными значениями g1, g2. Положение х3 выдвигания может находиться по величине, например, между внесенными положениями х1 и х2 выдвигания. За счет выполнения согласно изобретению системы 1 управления краном можно определять для другого положения х3 выдвигания между внесенными положениями х1, х2 выдвигания выдвижной стрелы 6 лежащее по величине между внесенными предельными значениями g1, g2 предельное значение g3, и использовать его для задания предельного значения для рабочего параметра крана 2 с помощью устройства 9 контролирования перегрузки. При этом другое предельное значение g3 для другого положения х3 выдвигания может определяться вычислительным блоком 18 системы 1 управления краном посредством интерполяции между внесенными в память 8 величинами. При этом задание другого предельного значения может осуществляться непрерывно для каждого положения выдвигания вдоль всего хода выдвигания выдвижной стрелы 6 удлинения 5 стрелы крана, или же ступенчато лишь на некоторых участках или, соответственно, с интервалами. Таким образом, в противоположность управлению краном с учетом лишь вдвинутого состояния удлинения стрелы крана, при котором получаются лишь два предельных значения на пути сдвигания, можно определять оптимально согласованное с моментальным положением выдвигания предельное значение по меньшей мере для одного рабочего параметра крана 2 из внесенных в память 8 таблиц с величинами, и задавать с помощью системы 1 управления краном.
Аналогичным образом, на фиг. 9b показан кран 2 с удлинением 5 стрелы крана и выступающей стрелой 7, при этом удлинение 5 стрелы крана находится в положении, характеризующимся измеренным датчиком k1 углом а23 сгибания. Подаваемое в систему 1 управления краном измерительное значение угла а23 сгибания лежит в этом примере выполнения по величине между внесенными в память 8 системы 1 управления краном углами а21 и а22 сгибания. За счет выполнения системы 1 управления краном в соответствии с изобретением, может задаваться другое предельное значение g6, которое лежит по величине между внесенными предельными значениями g4 и g5. При этом, например, возможно, что другое предельное значение g6 определяется с помощью вычислительного блока 18 системы 1 управления краном посредством интерполяции между внесенными в память 8 величинами. Таким образом, возможно, что также для положений угла сгибания удлинения 5 стрелы крана могут задаваться с помощью устройства 9 контролирования перегрузки системы 1 управления краном предельные значения для рабочих параметров, для которых в память 8 не внесены собственные величины.
В принципе возможно также, что с помощью системы 1 управления краном, аналогично указанному выше применительно к удлинению 5 стрелы крана, могут определяться и задаваться предельные значения для различных и также не характеризуемых с помощью величин в памяти 8 положений выдвигания и положений угла сгибания выступающей стрелы 7 и/или другой выступающей стрелы 12, для показанного в качестве примера на фиг. 4а или 4с крана.
Перечень позиций
1 Система управления краном
2 Кран
3 Первая стрела крана
4 Вторая стрела крана
а1, а2, а3, а4 Шарнирные углы
5 Удлинение стрелы крана
6 Выдвижная стрела крана
7 Выступающая стрела
s1 Датчик положения выдвигания
x1, x2, x3 Положения выдвигания
8 Память
е1, е2 Величины
9 Устройство контролирования перегрузки
g1, g2, g3 Предельные значения
k1 Датчик угла сгибания
а21, а22, а23 Угол сгибания
е3, е4 Величины
g4, g5, g6 Предельные значения
10,11 Стрела крана
s2 Датчик положения выдвигания
12 Выступающая стрела
k2 Датчик угла сгибания
13, 14 Стрела крана
15,16,17 Гидравлические цилиндры
s3 Датчик положения выдвигания
k3 Угол сгибания
18 Вычислительный блок
19 Транспортное средство
20 Гидравлический цилиндр
р Датчик давления
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛИРОВАНИЯ РАБОЧИХ ПАРАМЕТРОВ И/ИЛИ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ИЗНОСА ТРОСА ПРИ ИСПОЛЬЗОВАНИИ В ПОДЪЕМНЫХ МЕХАНИЗМАХ | 2017 |
|
RU2729841C2 |
| Способ повышения безопасности и система безопасности стрелового грузоподъемного крана | 2018 |
|
RU2700312C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2009 |
|
RU2396202C1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗОК | 2004 |
|
RU2276096C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2345944C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2005 |
|
RU2305063C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА СТРЕЛОВОГО ТИПА С МАНЕВРОВОЙ СТРЕЛОЙ | 2006 |
|
RU2319656C1 |
Предложена система управления краном. Кран (2) содержит первую стрелу (3) крана, вторую стрелу крана (4), располагаемую на первой стреле (3) под первым шарнирным углом, удлинение (5) с выдвижной стрелой (6), располагаемое на второй стреле (4) крана под вторым шарнирным углом. Выдвижная стрела (6) крана может принимать различные положения выдвигания. Система (1) управления краном содержит датчик (s1) для измерения положения выдвигания выдвижной стрелы (6) крана и память (8) для внесения величин (e1, e2) предельных значений (g4, g5) характеризующего моментальную нагрузку крана рабочего параметра крана (2). Для двух положений (х1, х2) выдвигания выдвижной стрелы (6) крана, для полностью вдвинутого положения (x1) выдвигания выдвижной стрелы (6) крана и полностью выдвинутого положения (x2) выдвигания выдвижной стрелы (6) крана в память (8) внесены величины (e1, e2) для максимально допустимых предельных значений (g1, g2). Система (1) управления краном содержит устройство (9) контролирования перегрузки. С помощью устройства (9) контролирования перегрузки предусмотрена возможность задания в систему (1) управления краном предельного значения (g1, g2) для одного рабочего параметра крана (2). С помощью устройства (9) контролирования перегрузки задается предельное значение (g1, g2), исходя из внесенных величин (е1, е2), в зависимости от положения (х1, х2) выдвигания выдвижной стрелы (6) крана. Для другого положения (х3) выдвигания между внесенными положениями (х1, х2) выдвигания выдвижной стрелы (6) крана предусмотрена возможность задания предельного значения (g3), лежащего по величине между внесенными величинами (е1, е2). Предложен также кран. Достигается плавный переход от высокого предельного значения допустимого рабочего параметра крана на уменьшенное предельное значение рабочего параметра и более эффективное использование потенциальных возможностей крана на основании задания предельных значений в зависимости от состояния вдвигания удлинения стрелы крана. 2 н. и 17 з.п. ф-лы, 19 ил.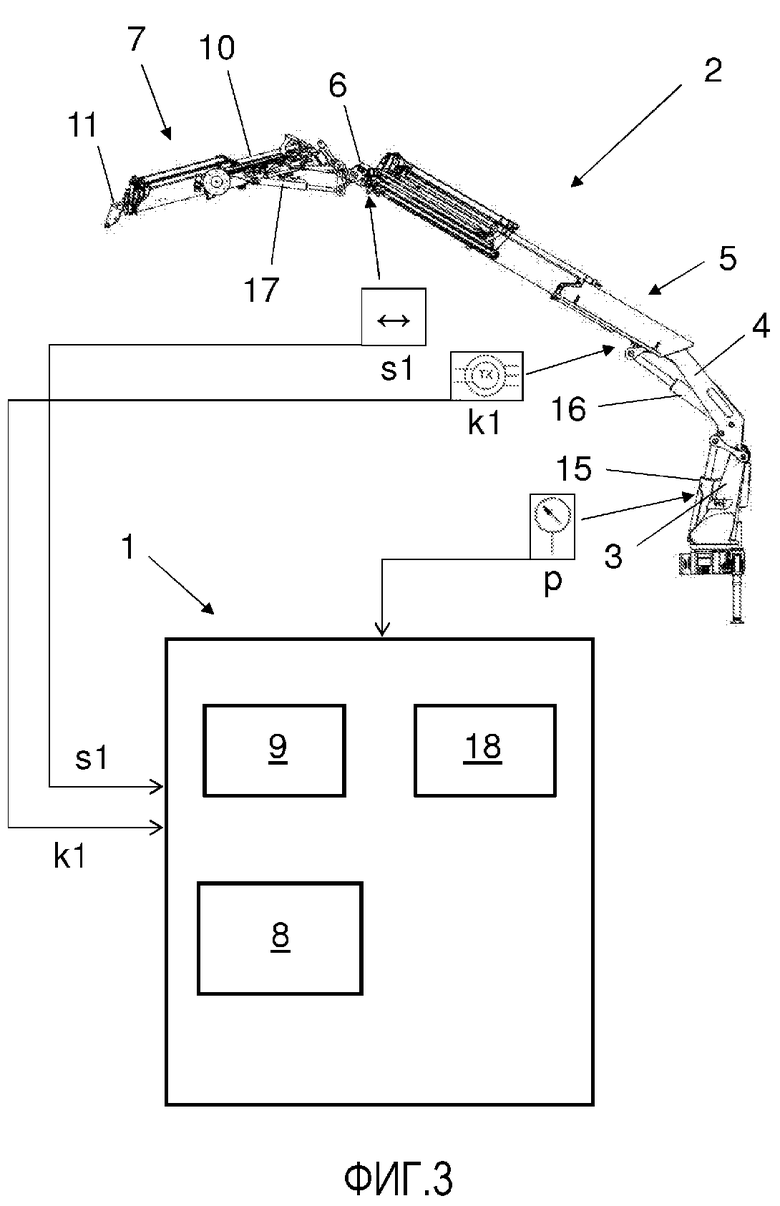
1. Система (1) управления краном для крана (2), предпочтительно погрузочного крана, при этом кран (2) имеет по меньшей мере:
- первую стрелу (3) крана,
- располагаемую на ней под первым шарнирным углом (а1) вторую стрелу крана (4),
- располагаемое на второй стреле (4) крана под вторым шарнирным углом (а2) удлинение (5) стрелы крана по меньшей мере с одной выдвижной стрелой (6), при этом выдвижная стрела (6) крана может принимать различные положения (х1, х2, х3) выдвигания,
и при этом система (1) управления краном имеет по меньшей мере:
- датчик (s1) для измерения положения (х1, х2, х3) выдвигания по меньшей мере одной выдвижной стрелы (6) крана, и
- память (8) для внесения величин (е1, е2) предельных значений (g4, g5) по меньшей мере для одного характеризующего моментальную нагрузку крана рабочего параметра крана (2), при этом по меньшей мере для двух положений (х1, х2) выдвигания по меньшей мере одной выдвижной стрелы (6) крана, предпочтительно по существу для полностью вдвинутого положения (х1) выдвигания выдвижной стрелы (6) крана и по существу для полностью выдвинутого положения (х2) выдвигания выдвижной стрелы (6) крана, в память (8) внесены величины (е1, е2) для максимально допустимых предельных значений (g1, g2),
и система (1) управления краном дополнительно имеет устройство (9) контролирования перегрузки, и с помощью устройства (9) контролирования перегрузки предусмотрена возможность задания в систему (1) управления краном предельного значения (g1, g2) по меньшей мере для одного рабочего параметра крана (2), и при этом с помощью устройства (9) контролирования перегрузки задается предельное значение (g1, g2), исходя из внесенных величин (е1, е2), в зависимости от положения (х1, х2) выдвигания выдвижной стрелы (6) крана,
отличающаяся тем, что по меньшей мере для одного другого положения (х3) выдвигания между внесенными положениями (х1, х2) выдвигания по меньшей мере одной выдвижной стрелы (6) крана предусмотрена возможность задания предельного значения (g3), лежащего по величине между внесенными величинами (е1, е2).
2. Система (1) управления краном по п. 1, в которой кран (2) дополнительно имеет расположенную на удлинении (5) стрелы крана под третьим шарнирным углом (а3) выступающую стрелу (7), предпочтительно шарнирную стрелу.
3. Система (1) управления краном по п. 1 или 2, в которой система (1) управления краном имеет датчик (k1) угла сгибания для измерения второго угла (а2) сгибания удлинения (5) стрелы крана в вертикальной плоскости, в память (8) внесены по меньшей мере для двух углов (а21, а22) сгибания удлинения (5) стрелы крана величины (е2, е4) для максимально допустимых предельных значений (g4, g5), и задание предельного значения (g4, g5) осуществляется с помощью устройства (9) контролирования перегрузки в зависимости от измеренного угла (а2) сгибания.
4. Система (1) управления краном по п. 3, в которой предусмотрена возможность задания по меньшей мере для одного другого угла (а23) сгибания между внесенными в память углами (а21, а22) сгибания удлинения (5) стрелы крана предельного значения (g6), лежащего по величине между внесенными величинами (е3, е4).
5. Система (1) управления краном по любому из пп. 2-4, в которой выступающая стрела (7) крана имеет по меньшей мере две стрелы (10, 11) крана, при этом две стрелы (10, 11) крана могут принимать относительно друг друга два различных положения выдвигания, и при этом система (1) управления краном имеет другой датчик (s2) положения выдвигания для измерения положения выдвигания стрел (10, 11) крана выступающей стрелы (7), и при этом в память (8) по меньшей мере для двух положений выдвигания стрел (10, 11) крана выступающей стрелы (7), предпочтительно по существу для полностью вдвинутого положения стрел (10, 11) крана выступающей стрелы (7) и по существу для полностью выдвинутого положения стрел (10, 11) крана выступающей стрелы (7), внесены величины для максимально допустимых предельных значений, и задание предельного значения с помощью устройства (9) контролирования перегрузки осуществляется в зависимости от измеренного положения выдвигания стрел (10, 11) крана выступающей стрелы (7).
6. Система (1) управления краном по п. 5, в которой по меньшей мере для одного другого положения выдвигания между внесенными в память положениями выдвигания стрел (10, 11) крана выступающей стрелы (7) предусмотрена возможность задания предельного значения, лежащего по величине между внесенными величинами.
7. Система (1) управления краном по п. 5 или 6, в которой система (1) управления краном имеет другой датчик (k2) угла сгибания для измерения третьего угла (а3) сгибания выступающей стрелы (7) в вертикальной плоскости, в память внесены по меньшей мере для двух углов сгибания выступающей стрелы (7) величины для максимально допустимых предельных значений, и задание предельного значения осуществляется с помощью устройства (9) контролирования перегрузки в зависимости от измеренного угла (а3) сгибания выступающей стрелы (7).
8. Система (1) управления краном по п. 7, в которой по меньшей мере для одного другого угла сгибания выступающей стрелы (7) между занесенными в память углами сгибания выступающей стрелы (7) предусмотрена возможность задания предельного значения, лежащего по величине между внесенными величинами.
9. Система (1) управления краном по любому из пп. 2-8, в которой на выступающей стреле (7) под четвертым шарнирным углом (а4) возможно расположение другой выступающей стрелы (12), предпочтительно другой шарнирной стрелы.
10. Система (1) управления краном по п. 9, в которой другая выступающая стрела (12) имеет по меньшей мере две стрелы (13, 14) крана, при этом две стрелы (13, 14) крана могут принимать относительно друг друга различные положения выдвигания, и при этом система управления краном имеет другой датчик (s3) положения выдвигания для измерения положения выдвигания стрел (13, 14) крана другой выступающей стрелы (12), и при этом в память (8) внесены величины для максимально допустимых предельных значений по меньшей мере для двух положений выдвигания стрел (13, 14) крана другой выступающей стрелы (12), предпочтительно по существу для полностью вдвинутого положения стрел (13, 14) крана другой выступающей стрелы (12) и по существу для полностью выдвинутого положения стрел (13, 14) крана другой выступающей стрелы (12), и задание предельного значения осуществляется с помощью устройства (9) контролирования перегрузки в зависимости от измеренного положения выдвигания стрел (13, 14) крана другой выступающей стрелы (12).
11. Система (1) управления краном по п. 10, в которой по меньшей мере для одного другого положения выдвигания между внесенными в память положениями выдвигания стрел (13, 14) крана другой выступающей стрелы (12) предусмотрена возможность задания предельного значения, лежащего по величине между внесенными величинами.
12. Система (1) управления краном по п. 10 или 11, в которой система (1) управления краном имеет другой датчик (k3) угла сгибания для измерения четвертого шарнирного угла (а4) другой выступающей стрелы (12) в вертикальной плоскости, в память (8) внесены по меньшей мере для двух углов сгибания другой выступающей стрелы (12) величины для максимально допустимых предельных значений, и задание предельного значения осуществляется с помощью устройства (9) контролирования перегрузки в зависимости от измеренного шарнирного угла (а4) другой выступающей стрелы (12).
13. Система (1) управления краном по п. 12, в которой по меньшей мере для одного другого угла сгибания другой выступающей стрелы (12) между внесенными в память углами сгибания другой выступающей стрелы (12) предусмотрена возможность задания предельного значения, лежащего по величине между внесенными величинами.
14. Система (1) управления краном по п. 2 или 9, в которой для различных выполнений выступающих стрел (7, 12) в память (8) внесены соответствующие специфичные величины предельных значений.
15. Система (1) управления краном по любому из пп. 1-14, в которой положение выдвигания выдвижной стрелы (6) крана и/или стрел (10, 11, 13, 14) крана измеряется с помощью приспособления для измерения пути.
16. Система (1) управления краном по любому из пп. 1-15, в которой рабочий параметр является давлением в гидравлическом цилиндре (15, 16, 17, 20).
17. Система (1) управления краном по любому из пп. 1-16, в которой предусмотрена возможность определения предельного значения по меньшей мере для одного другого положения выдвигания или по меньшей мере для одного другого угла сгибания посредством интерполяции, предпочтительно посредством линейной интерполяции или полиноминальной интерполяции более высокого порядка, между внесенными в память (8) величинами.
18. Система (1) управления краном по любому из пп. 1-17, в которой с помощью устройства (9) контролирования перегрузки обеспечивается возможность ограничения по меньшей мере одной функции управления системы (1) управления краном в зависимости от отношения измеренного рабочего параметра к предельному значению для рабочего параметра.
19. Кран (2), в частности погрузочный кран для транспортного средства (19), особенно предпочтительно кран с шарнирными стрелами, с системой (1) управления краном по любому из пп. 1-18.
| EA 200801112 A1, 29.08.2008 | |||
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2145568C1 |
| Способ присоединения оборванных выводных проводников у электровакуумных приборов | 1939 |
|
SU56363A1 |

