Изобретение относится к вспомогательным устройствам, преимущественно легковых автомобилей, в частности к встроенным подъемно-транспортным приспособлениям, облегчающим маневрирование, в том числе парковку, в стесненных дорожных условиях.
Известен «Способ парковки автомобилей и устройство для его реализации» (патент RU 2491398 С2, МПК: Е04Н 6/18, опубл. 20.12.2012 г. Бюл. №35).
Устройство содержит индивидуальный подъемный механизм, который выполнен в виде установленных на днище автомобиля между его колесами поворотных стоек, оси поворота которых параллельны продольной оси автомобиля. Стойки снабжены средствами регулирования их высоты и фиксации относительно днища, а концы стоек снабжены опорными роликами, оси вращения которых перпендикулярны осям вращения колес автомобиля. Средства регулирования высоты стоек выполнены в виде передачи винт-гайка или другой зубчатой передачи, или с помощью пневмоцилиндра. Причем изменение высоты стоек может осуществляться как в ручном режиме, так и с помощью привода (используется энергия автомобиля или индивидуальный насос). Средства фиксации стоек относительно днища автомобиля выполнены в виде поворотного кронштейна и упора, которые не выходят за допустимые габариты (клиренс) автомобиля.
Для парковки автомобиль фиксируют на подъемном устройстве, поднимают его до высоты, при которой шины колес не касаются дорожного покрытия, наклоняют подъемное устройство с автомобилем в направлении места парковки между смежными припаркованными автомобилями, перемещают автомобиль в зону парковки под действием скатывающейся силы и посредством подъемного устройства опускают паркуемый автомобиль до полного касания шин колес с дорожным покрытием. Распарковка автомобиля выполняется аналогично в противоположном направлении.
Недостатками данного устройства являются большие энергозатраты автомобиля, связанные с подъемом собственного веса, сложность конструкции и экплуатации, ручное перемещение автомобиля при парковке связано с опасным выходом водителя на проезжую часть и серьезными задержками транспортного потока, в случае неровного и замусоренного дорожного покрытия ручное перемещение автомобиля на роликах малого диаметра оказывается трудоемкой операцией, автоматизация устройства приводит к систематической серьезной весовой нагрузке на автомобиль.
Известно «Автомобильное парковочное устройство» (патент RU 2489282 С2, МПК: B60S 9/215, Опубл. 20.09.2012 Бюл. №26), которое принимается в качестве прототипа заявляемого устройства. Устройство-прототип представляет собой встроенную в автомобиль конструкцию, позволяющую приподнять над дорогой все его ходовые колеса. В качестве электромеханической подъемно-опускной системы в конструкции используется червячно-реечная передача. Каждая опора состоит из соединенных телескопически неподвижного элемента и выдвижного штока, в крайних положениях которого предусмотрены концевые выключатели. Возвратно-поступательное движение штока осуществляется от отдельного реверсивного электродвигателя, питаемого от бортовой сети автомобиля. Вспомогательное колесо шарнирно установлено на вертикальной оси штока, который выдвигается из неподвижной части, вспомогательное колесо опускается на опорную поверхность, приподнимая соответствующую часть автомобиля. Вращение вспомогательных колес отдельным реверсивным электродвигателем обеспечивает поперечное движение транспортного средства без манипуляций рулевым колесом. Для разворота или поворота автомобиля на узкой дороге вспомогательные колеса поворачиваются на вертикальной оси перпендикулярно линиям, соединяющим диагонально расположенные колеса. При использовании устройства в качестве встроенного домкрата, осуществляющего плавный подъем и опускание груза на опорную поверхность, обеспечивается соблюдение всех условий безопасности. Во избежание самопроизвольного скатывания транспортного средства на вспомогательных колесах при подъеме всех его ходовых колес от дороги, предусмотрен тормоз вспомогательных колес. Вал низкооборотного реверсивного электродвигателя привода вспомогательного колеса соединен с валом колеса через упругую соединительную компенсирующую муфту, смягчающую толчки и удары вращающего момента.
Недостатками данного устройства являются большие энергозатраты автомобиля, связанные с подъемом собственного веса, сложность конструкции и экплуатации, серьезная весовая нагрузка на автомобиль.
Задача заключается в придании автомобилю возможностей передвижений в поперечных направлениях и поворотов на месте более простыми, легкими и менее энергозатратными средствами.
Техническим результатом изобретения является упрощение, облегчение и снижение эксплуатационных энергозатрат устройства поперечного передвижения автомобиля, что способствует его массовому внедрению в серийные автомобили, что в свою очередь обеспечивает повышение плотности парковки автотранспорта на улицах мегаполисов и придомовых территориях до полутора раз с соответствующим освобождением проезжей части магистралей и увеличением их пропускной способности.
Технический результат достигается тем, что в устройство поперечного передвижения автомобиля, содержащее первый и второй реверсивные электродвигатели, дополнительно введены: датчик команд, логический элемент ИЛИ, первый логический элемент И, первый датчик горизонта, шифратор, первый RS-триггер, первый усилитель мощности, первый соленоид, второй RS-триггер, второй усилитель мощности, третий RS-триггер, первый коммутатор полярности, второй соленоид, датчик вертикали, второй коммутатор полярности, третий усилитель мощности, второй логический элемент И, первый редуктор, четвертый усилитель мощности, четвертый RS-триггер, второй редуктор, второй датчик горизонта, третий логический элемент И, передний и задний двухсторонние костыли с шарообразными в профиле, обрезиненными башмаками на концах,
- причем костыли устанавливают по одному в передней и задней частях автомобиля, вращаемых вокруг продольной оси автомобиля, лежащей в плоскости осей его ходовых колес, длиной, достаточной для превращения в своем вертикальном положении их в единственные опорные точки со своей стороны автомобиля, а шина первого выхода датчика команд связана с шиной входа логического элемента ИЛИ и шиной входа шифратора, первый выход и второй выход которого соединены с первыми входами, соответственно, второго и третьего RS-триггеров, второй выход датчика команд связан с первыми входами первого и третьего логических элементов И, выход логического элемента ИЛИ соединен с первым входом первого RS-триггера, выход первого датчика горизонта связан со вторым входом первого логического элемента И, выход которого которого связан со вторыми входами первого и третьего RS-триггеров, выход второго RS-триггера связан с первым входом первого коммутатора полярности, второй вход которого подключен к выходу четвертого усилителя мощности, выход первого RS-триггера связан с входами первого и второго усилителей мощности, а также с первым входом второго логического элемента И, выход первого усилителя мощности соединен с входом первого соленоида, выход первого коммутатора полярности связан с входом первого реверсивного двигателя, вал которого через первый редуктор соединен с валом заднего костыля, выход третьего RS-триггера связан с первым входом второго коммутатора полярности, второй вход которого связан с выходом второго усилителя мощности, выход второго коммутатора полярности связан с входом второго реверсивного электродвигателя, вал которого через второй редуктор связан с валом переднего костыля, выход второго датчика горизонтали соединен со вторым входом третьего логического элемента И, выход которого связан со вторым входом второго RS-триггера и первым входом четвертого RS-триггера, второй вход которого связан с выходом второго логического элемента И, второй вход которого соединен с выходом датчика вертикали, выход четвертого RS-триггера соединен с входами третьего и четвертого усилителей мощности, выход третьего усилителя мощности связан с входом второго соленоида.
Технический результат в части упрощения и облегчения устройства поперечного передвижения автомобиля достигается за счет сокращения числа и уменьшения длины, и мощности силовых передач в устройстве. Сокращение эксплуатационных энергозатрат обеспечивается за счет использования способа поперечного передвижения автомобиля, не требующего в любой момент этого процесса полного подъема автомобиля над дорожным полотном. Поскольку только добавление новых блоков и связей обеспечивает указанный технический результат, и вся комбинация блоков и связей заявляемого устройства ранее была неизвестна предлагаемое техническое решение обладает патентной новизной.
Заявляемое изобретение поясняется следующими чертежами:
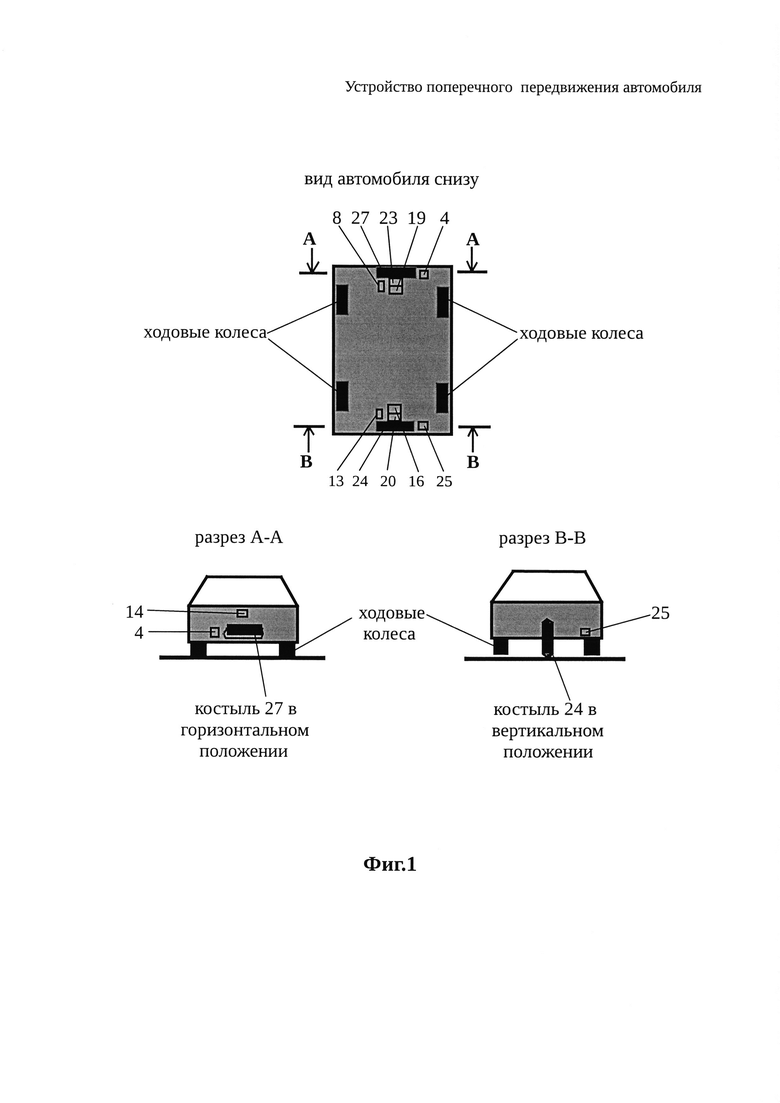
Фиг. 1 Вспомогательное оборудование автомобиля.
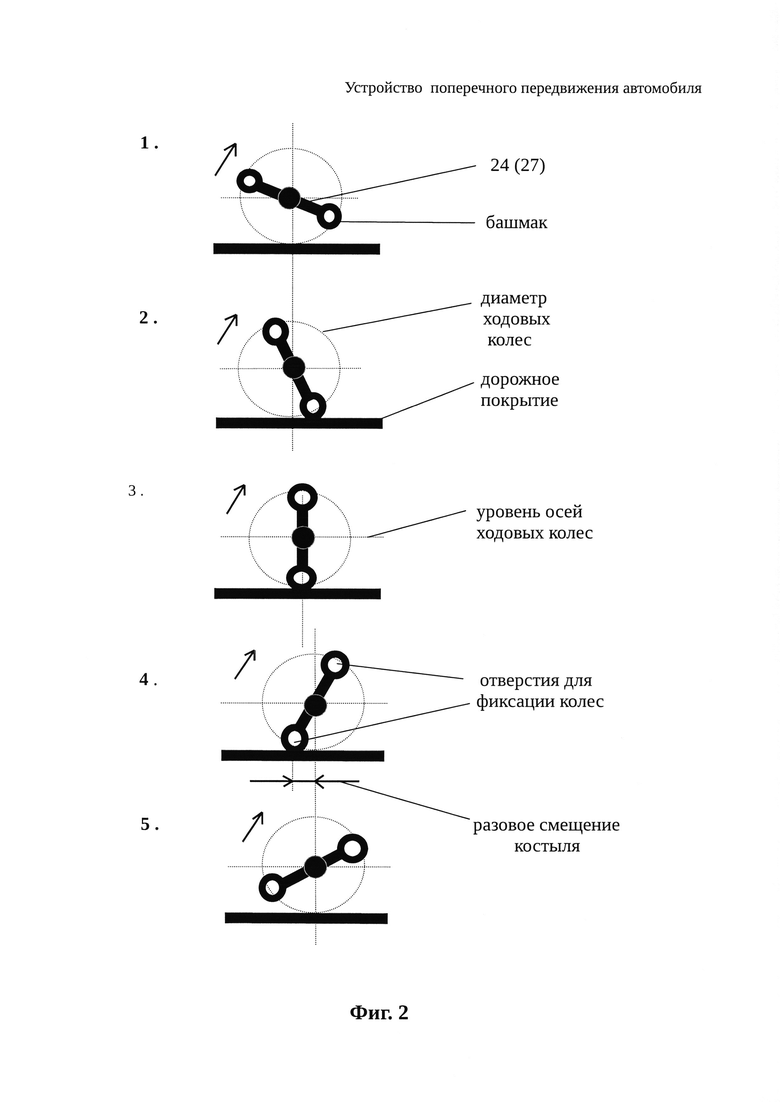
Фиг. 2 Смещение костыля при его вращении.
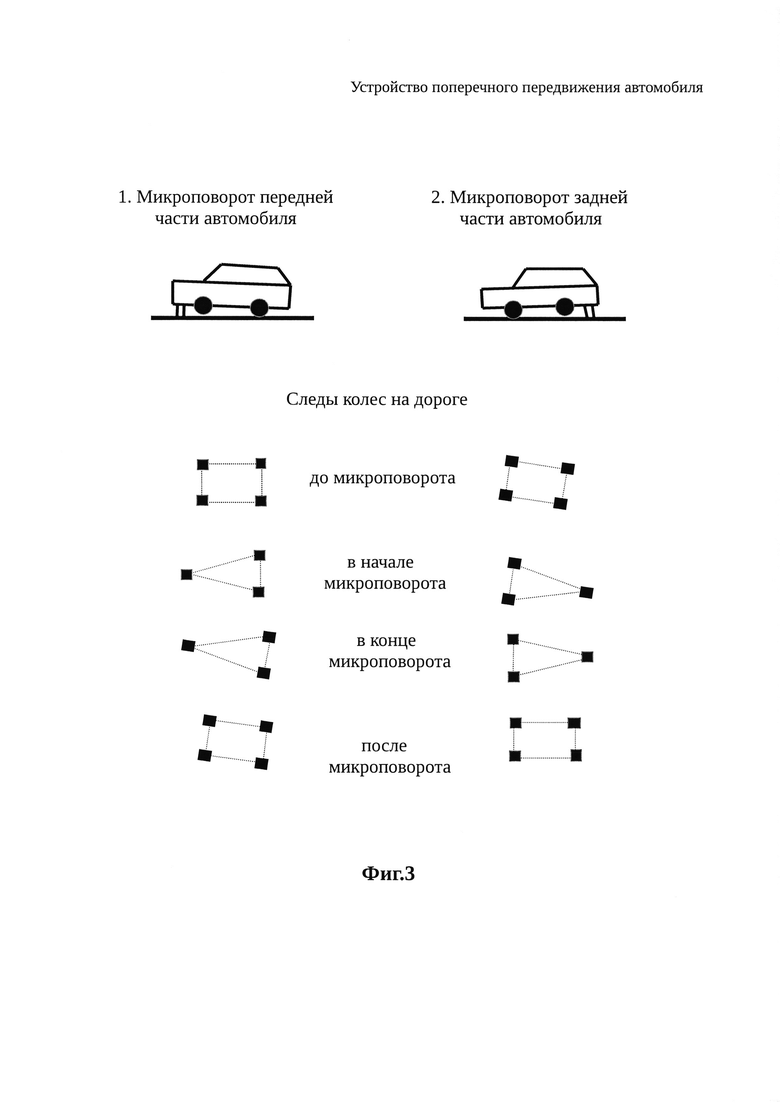
Фиг. 3 Детализация элементарного поперечного передвижения.
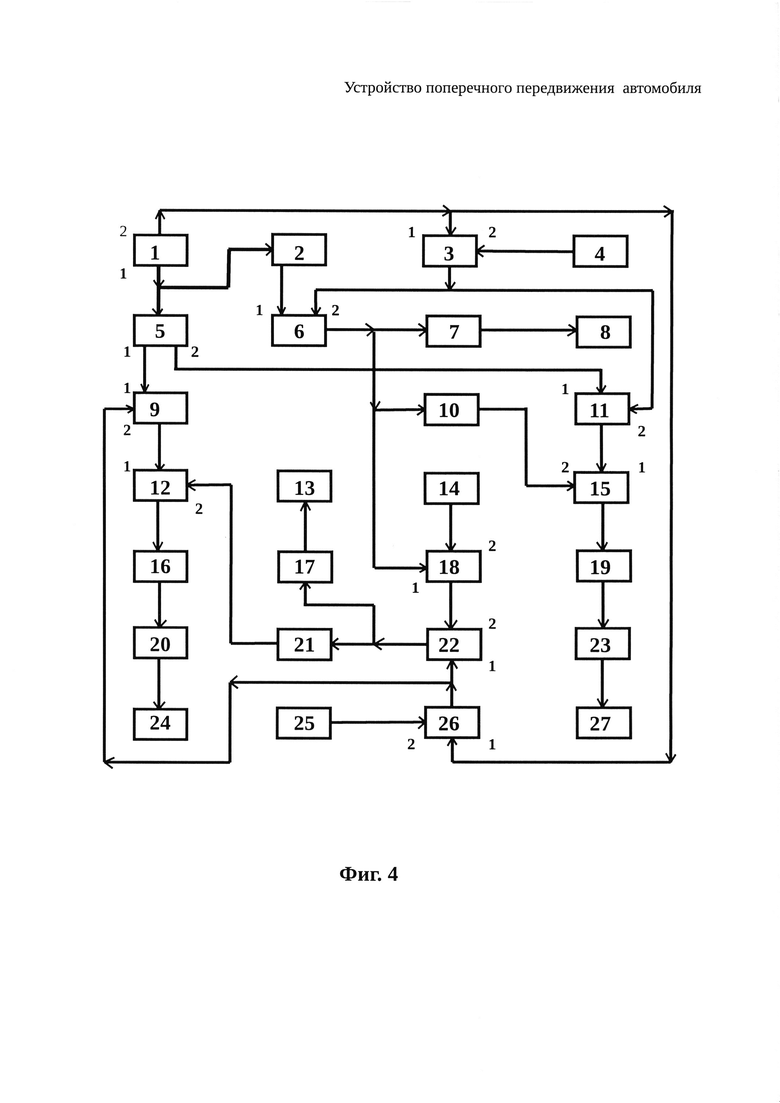
Фиг. 4 Функциональная схема устройства.
Заявляемое устройство включает в себя следующие блоки:
1 - датчик команд,
2 - логический элемент ИЛИ,
3 - первый логический элемент И,
4 - первый датчик горизонта,
5 - шифратор,
6 - первый RS-триггер,
7 - первый усилитель мощности,
8 - первый соленоид,
9 - второй RS-триггер,
10 - второй усилитель мощности,
11 - третий RS-триггер,
12 - первый коммутатор полярности,
13 - второй соленоид,
14 - датчик вертикали,
15 - второй коммутатор полярности,
16 - первый реверсивный электродвигатель,
17 - третий усилитель мощности,
18 - второй логический элемент И,
19 - второй реверсивный электродвигатель,
20 - первый редуктор,
21 - четвертый усилитель мощности,
22 - четвертый RS-триггер,
23 - второй редуктор,
24 - задний костыль,
25 - второй датчик горизонта,
26 - третий логический элемент И,
27 - передний костыль,
причем шина первого выхода (команды движения) датчика команд 1 связана с шиной входа логического элемента ИЛИ 2 и шиной входа шифратора 5, первый выход (линия 0-разряда) и второй выход (линия 1-разряда) которого соединены с первыми (S) входами, соответственно, второго 9 и третьего 11 RS-триггеров, второй выход (останов) датчика команд 1 связан с первыми входами первого 3 и третьего 26 логических элементов И, выход логического элемента ИЛИ 2 соединен с первым (S) входом первого RS-триггера 6, выход первого датчика горизонта 4 связан со вторым входом первого логического элемента И 3, выход которого связан со вторыми (R) входами первого 6 и третьего 11 RS-триггеров, (прямой) выход второго RS-триггера 9 связан с первым (управляющим) входом первого коммутатора полярности 12, второй (силовой) вход которого подключен к выходу четвертого усилителя мощности 21, (прямой) выход первого RS-триггера 6 связан с входами первого 7 и второго 10 усилителей мощности, а также с первым входом второго логического элемента И 18, выход первого усилителя мощности 7 соединен с входом первого соленоида 8, выход первого коммутатора полярности 12 связан с входом первого реверсивного двигателя 16, вал которого через первый редуктор 20 соединен с валом заднего костыля 24, (прямой) выход третьего RS-триггера связан с первым (управляющим) входом второго коммутатора полярности 15, второй (силовой) вход которого связан с выходом второго усилителя мощности 10, выход второго коммутатора полярности 15 связан с входом второго реверсивного электродвигателя 19, вал которого через второй редуктор 23 связан с валом переднего костыля 27, выход второго датчика горизонтали 25 соединен со вторым входом третьего логического элемента И 26, выход которого связан со вторым (R) входом второго RS-триггера 9 и первым (R) входом четвертого RS-триггера 22, второй (S) вход которого связан с выходом второго логического элемента И 18, второй вход которого соединен с выходом датчика вертикали 14, (прямой) выход четвертого RS-триггера 22 соединен с входами третьего 17 и четвертого 21 усилителей мощности, выход третьего усилителя мощности 17 связан с входом второго соленоида 13.
Устройство работает следующим образом:
Перед включением питания передний 27 и задний 24 костыли находятся в зафиксированном горизонтальном положении, посредством вхождения подпружиненных стержней обесточенных, соответственно, первого 8 и второго 13 соленоидов. При включении питания устройства первый 6, второй 9, третий 11 и четвертый 22 RS-триггеры автоматически устанавливаются нулевое состояние. Цепи начальной установки на функциональной схеме (рис. 4) для простоты не показаны. При необходимости совершить поперечное передвижение автомобиля водитель с помощью датчика команд 1 формирует соответствующую команду. Датчик команд 1 представляет собой четырех позиционный переключатель для формирования на шине своего первого выхода унитарного кода, соответствующего выбранной водителем команде, и независимую кнопку для формирования единичного сигнала остановки поперечного передвижения и фиксации костылей в горизонтальном положении на своем втором выходе.
При необходимости совершить поперечное передвижение автомобиля вправо, например, для парковки водитель формирует на первом выходе датчика команд 1 код 0001, который поступает на шину входа логического элемента ИЛИ 2 и шину входа шифратора 5. В итоге на выходе логического элемента ИЛИ 2 формируется единичный сигнал, переводящий первый RS-триггер 6 в единичное состояние. Одновременно на первом и втором выходах шифратора 5 формируются нулевые сигналы. С прямого выхода первого RS-триггера 6 единичный сигнал через первый усилитель мощности 7 включает первый соленоид 8, через второй усилитель мощности 10 поступает на второй (силовой) вход второго коммутатора полярности 15 и на первый вход второго логического элемента И 18. При включении стержень первого соленоида 8 втягивается внутрь и освобождает таким образом передний костыль. Одновременно нулевые сигналы на первом и втором выходах шифратора 5 не приводят к изменению начальных нулевых состояний второго 9 и третьего 11 RS-триггеров. Поэтому с прямых выходов этих триггеров нулевые сигналы поступают, соответственно, на первые (управляющие) входы первого 12 и второго 15 коммутаторов полярности. В результате на выходе второго коммутатора полярности 19 формируется силовой сигнал, который заставляет второй реверсивный двигатель 19 вращаться так, чтобы после передачи усилия через второй редуктор 23 обеспечить вращение переднего костыля 27 по часовой стрелке при взгляде по ходу движения автомобиля. В это время до достижения передним костылем 27 вертикального положения первый реверсивный двигатель 16 находится в покое вследствие отсутствия силового сигнала на его входе по причине нулевого сигнала на прямом выходе четвертого RS-триггера 22. Когда передний костыль 27 достигает вертикального положения на выходе датчика вертикали 14 возникает единичный сигнал, который поступает на второй вход второго логического элемента И 18. В результате на выходе второго логического элемента И 18 формируется единичный сигнал, который переводит четвертый RS-триггер 22 в единичное состояние. Единичный сигнал с прямого выхода четвертого RS-триггера через третий 17 и четвертый 21 усилители мощности поступает, соответственно, на вход второго соленоида 13 и второй вход первого коммутатора полярности 12. В результате срабатывает второй соленоид 13 и освождается от фиксации задний костыль. Одновременно через первый коммутатор полярности 12 силовой сигнал поступает на вход первого реверсивного двигателя 16, который через первый редуктор 20 заставляет вращаться задний костыль 24 также по часовой стрелке при взгляде по ходу движения автомобиля. Таким образом, в рассматриваемом режиме и передний костыль 27 и задний костыль 24 вращаются по часовой стрелке при вгляде по ходу движения автомобиля с одинаковой угловой скоростью во взаимоперпендикулярном положении. При прохождении костылем вертикального положения происходит его, а следовательно и соответствующей части автомобиля, элементарное смещение вправо (фиг. 2). Каждое такое смещение приводит к соответствующему элементарному повороту автомобиля. А поскольку происходит чередование элементарных смещений передней и задней частей автомобиля, происходит постепенное смещение вправо всего автомобиля (фиг. 3). Такое передвижение автомобиля вправо продолжается до формирования водителем команды «останов» в виде единичного сигнала на втором выходе датчика команд 1, который поступает на первые входы первого 3 и третьего 26 логических элементов И и выдерживается до реального прекращения работы обоих первого 16 и второго 19 реверсивных двигателей. Первый реверсивный двигатель 16 прекращает свою работу когда передний костыль 27 принимает горизонтальное положение. Тогда на выходе первого датчика горизонтали 4 возникает единичный сигнал, который поступает на второй вход первого логического элемента И 3, вызывая тем самым появление единичного сигнала на его выходе, сбрасывающего в нулевое состояние первый 6 и третий 11 RS-триггеры. Нулевой сигнал на (прямом) выходе первого RS-триггера 6 через первый усилитель мощности 7 вызывает выключение первого соленоида 8 и через второй усилитель мощности 10 и второй коммутатор полярности 15 снятие силового сигнала со второго реверсивного двигателя 19, а также посредством второго логического элемента И 18 вызывает блокирование поступления единичных сигналов на S вход четвертого RS-триггера. В результате прекращает свою работу второй реверсивный двигатель 19 и фиксируется в горизонтальном положении передний костыль 27, но еще продолжает свою работу первый реверсивный двигатель 16. Когда задний костыль 24 достигает горизонтального положения, возникает единичный сигнал на выходе второго датчика горизонтали 25, который через третий логический элемент И 26 вызывает обнуление четвертого RS-триггера 22. Нулевой сигнал на выходе четвертого RS-триггера 22 через третий усилитель мощности 17 вызывает выключение второго соленоида 13 и через четвертый усилитель мощности 21 и первый коммутатор полярности 12 снятие силового сигнала с первого реверсивного двигателя 16. В результате фиксируется и задний костыль 24, а первый реверсивный двигатель 16 прекращает свою работу. Таким образом, поперечное передвижение автомобиля вправо прекращается.
При необходимости совершить поперечное передвижение автомобиля влево, например для распарковки, водитель формирует на первом выходе датчика команд 1 код 1000, который поступает на шину входа логического элемента 2 и шину входа шифратора 5. В итоге на выходе логического элемента 2 формируется единичный сигнал, переводящий первый RS-триггер 6 в единичное состояние. Одновременно на первом и втором выходах шифратора 5 формируются единичные сигналы, которые переводят в единичное состояние, соответственно, второй 9 и третий 11 RS-триггеры. Далее устройство работает также как при выполнении команды поперечного передвижения вправо с тем отличием, что теперь на первые (управляющие) входы второго 15 и первого 12 коммутаторов полярности поступают единичные сигналы, которые приводят к вращению переднего 27 и заднего 24 костылей против часовой стрелки при взгляде по ходу движения автомобиля. Причем задний костыль 24 вращается с отставанием в 90 градусов от переднего костыля 27. При прекращении передвижения автомобиля влево сначала останавливается и фиксируется в горизонтальном положении передний костыль 27, а через некоторое время то же самое происходит и с задним костылем 24.
При необходимости совершить поворот автомобиля на месте по часовой стрелке водитель формирует на первом выходе датчика команд 1 код 0100, который поступает на шину входа логического элемента 2 и шину входа шифратора 5. В итоге на выходе логического элемента 2 формируется единичный сигнал, переводящий первый RS-триггер 6 в единичное состояние. Одновременно на первом и втором выходах шифратора 5 формируются единичный и нулевой сигналы, соответственно, которые переводят в единичное состояние второй RS-триггер 9 и оставляют в нулевом состоянии третий 11 RS-триггер. При таких состояниях указанных триггеров, как было показано выше, передний костыль 27 вращается по часовой стрелке, а задний костыль 24 с той же угловой скоростью и с начальной угловой задержкой в 90 градусов вращается против часовой стрелки при взгляде по ходу движения автомобиля. Таким образом, обеспечивается поворот автомобиля на месте по часовой стрелке на любой желаемый угол. Для завершения поворота автомобиля водитель формирует единичный сигнал на втором выходе датчика команд 1 и выдерживает его до полного прекращения работы второго реверсивного двигателя 19 и фиксации в горизонтальном положении переднего костыля 27, а затем и выполнения тех действий с первым реверсивным двигателем 16 и задним костылем 24.
При необходимости совершить поворот автомобиля на месте против часовой стрелки водитель формирует на первом выходе датчика команд 1 код 0010, который поступает на шину входа логического элемента 2 и шину входа шифратора 5. В итоге на выходе логического элемента 2 формируется единичный сигнал, переводящий первый RS-триггер 6 в единичное состояние. Одновременно на первом и втором выходах шифратора 5 формируются нулевой и единичный сигналы, соответственно, которые оставляют в нулевом состоянии второй RS-триггер 9 и переводят в единичное состояние третий 11 RS-триггер. При таких состояниях указанных триггеров, как было показано выше, передний костыль 27 вращается против часовой стрелки, а задний костыль 24 с той же угловой скоростью и с начальной угловой задержкой в 90 градусов вращается по часовой стрелке при взгляде по ходу движения автомобиля. Таким образом, обеспечивается поворот автомобиля на месте против часовой стрелки на любой желаемый угол. Для завершения поворота автомобиля водитель формирует единичный сигнал на втором выходе датчика команд 1 и выдерживает его до полного прекращения работы второго реверсивного двигателя 19 и фиксации в горизонтальном положении переднего костыля 27, а затем и выполнения тех действий с первым реверсивным двигателем 16 и задним костылем 24.
Питание устройства, в том числе первого 16 и второго 19 реверсивных двигателей можно обеспечить за счет бортовой электросети. В качестве датчика вертикали 14, а также первого 4 и второго 25 датчиков горизонтали можно использовать, например датчики Холла [1] со встроенными постоянными магнитами с замыканием магнитных потоков костылями при их прохождении мимо датчиков.
В отличие от прототипа в заявляемом изобретении автомобиль при поперечном перемещении не поднимается полностью над дорожным покрытием, а все время опирается на передние или задние пары ходовых колес автомобиля, а также на один из двух костылей. Происходит специфическое поперечное перекатывание автомобиля. Это позволяет радикально снизить энергозатраты на поперечные перемещения автомобиля, использовать менее мощные и меньшем количестве энергодвигатели и механические передачи, снижая таким образом дополнительную весовую нагрузку на автомобиль, в любой момент времени в процессе поперечного передвижения обеспечивается устойчивость автомобиля.
Дополнительными положительными эффектами от изобретения являются экономия времени и топлива автомобиля при поиске мест для парковки и, как следствие, меньшее загрязнение воздуха автомобильными выхлопами.
Использованная литература
1. Викулин И.М., Стафеев В.И. Физика полупроводниковых приборов, 2 изд., М., «Радио и связь», 1990. - 264 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| ПРОТИВОУГОННАЯ СИСТЕМА | 1995 |
|
RU2086437C1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ ДАВЛЕНИЕМ | 1989 |
|
SU1658510A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для измерения вертикальных перемещений бурильной колонны | 1988 |
|
SU1557315A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Вентильный двигатель | 1983 |
|
SU1081753A1 |
| УСТРОЙСТВО ДЛЯ ЦИФРОВОЙ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ РЕЧЕВОЙ ИНФОРМАЦИИ | 1992 |
|
RU2008728C1 |
| ОХРАННОЕ КОДОВОЕ УСТРОЙСТВО | 1990 |
|
SU1834548A1 |
Изобретение относится к вспомогательным системам автомобиля. Устройство поперечного передвижения автомобиля содержит реверсивные электродвигатели, датчик команд, логический элемент ИЛИ, логические элементы И, датчики горизонта, шифратор, RS-триггеры, усилители мощности, соленоиды, коммутаторы полярности, датчик вертикали, редукторы, передний и задний двухсторонние костыли с шарообразными в профиле, обрезиненными башмаками на концах. Костыли устанавливают по одному в передней и задней частях автомобиля, вращаемых вокруг продольной оси автомобиля, лежащей в плоскости осей его ходовых колес, длиной, достаточной для превращения в своем вертикальном положении их в единственные опорные точки со своей стороны автомобиля. Достигается повышение плотности парковки транспортных средств на улицах мегаполисов. 4 ил.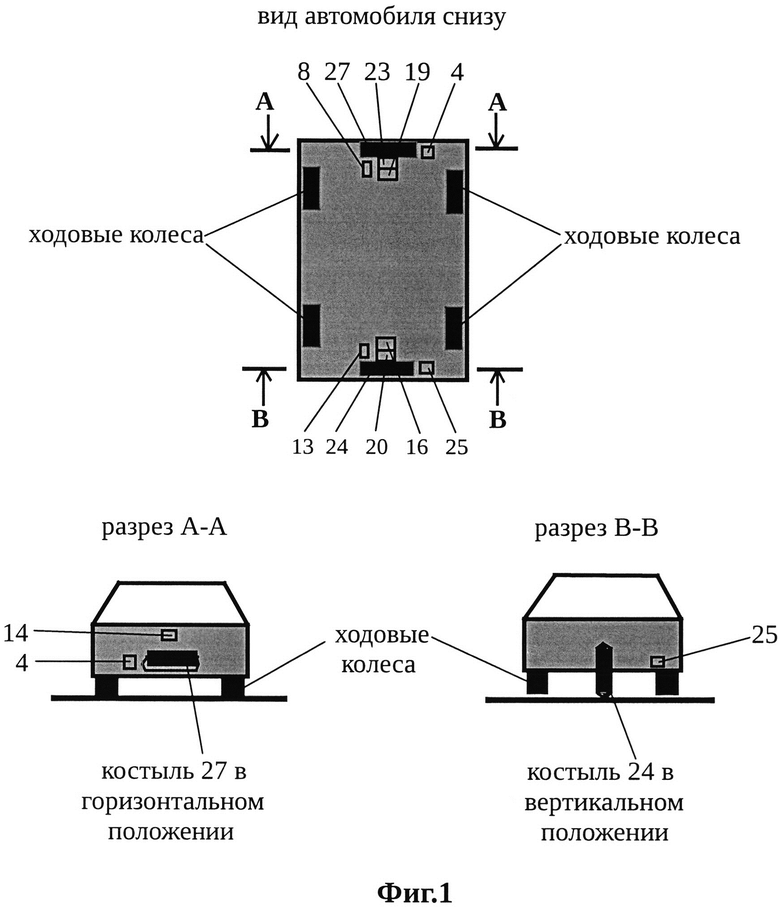
Устройство поперечного передвижения автомобиля, содержащее первый и второй реверсивные электродвигатели, отличающееся тем, что в него дополнительно введены: датчик команд, логический элемент ИЛИ, первый логический элемент И, первый датчик горизонта, шифратор, первый RS-триггер, первый усилитель мощности, первый соленоид, второй RS-триггер, второй усилитель мощности, третий RS-триггер, первый коммутатор полярности, второй соленоид, датчик вертикали, второй коммутатор полярности, третий усилитель мощности, второй логический элемент И, первый редуктор, четвертый усилитель мощности, четвертый RS-триггер, второй редуктор, второй датчик горизонта, третий логический элемент И, передний и задний двухсторонние костыли с шарообразными в профиле, обрезиненными башмаками на концах,
- причем костыли устанавливают по одному в передней и задней частях автомобиля, вращаемых вокруг продольной оси автомобиля, лежащей в плоскости осей его ходовых колес, длиной, достаточной для превращения в своем вертикальном положении их в единственные опорные точки со своей стороны автомобиля,
- причем шина первого выхода датчика команд связана с шиной входа логического элемента ИЛИ и шиной входа шифратора, первый выход и второй выход которого соединены с первыми входами, соответственно, второго и третьего RS-триггеров, второй выход датчика команд связан с первыми входами первого и третьего логических элементов И, выход логического элемента ИЛИ соединен с первым входом первого RS-триггера, выход первого датчика горизонта связан со вторым входом первого логического элемента И, выход которого которого связан со вторыми входами первого и третьего RS-триггеров, выход второго RS-триггера связан с первым входом первого коммутатора полярности, второй вход которого подключен к выходу четвертого усилителя мощности, выход первого RS-триггера связан с входами первого и второго усилителей мощности, а также с первым входом второго логического элемента И, выход первого усилителя мощности соединен с входом первого соленоида, выход первого коммутатора полярности связан с входом первого реверсивного двигателя, вал которого через первый редуктор соединен с валом заднего костыля, выход третьего RS-триггера связан с первым входом второго коммутатора полярности, второй вход которого связан с выходом второго усилителя мощности, выход второго коммутатора полярности связан с входом второго реверсивного электродвигателя, вал которого через второй редуктор связан с валом переднего костыля, выход второго датчика горизонтали соединен со вторым входом третьего логического элемента И, выход которого связан со вторым входом второго RS-триггера и первым входом четвертого RS-триггера, второй вход которого связан с выходом второго логического элемента И, второй вход которого соединен с выходом датчика вертикали, выход четвертого RS-триггера соединен с входами третьего и четвертого усилителей мощности, выход третьего усилителя мощности связан с входом второго соленоида.
| ГРАДИЕНТНЫЙ КОНЦЕНТРАТОР | 1999 |
|
RU2162257C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ АВТОМОБИЛЯ | 1992 |
|
RU2096206C1 |
| US 4605086 A, 12.08.1986. | |||

