Область техники
Данное изобретение относится к силовым устройствам, в которых усилие, передаваемое обратно к оператору, изменяется в зависимости от положения устройства и направления, в котором сориентировано устройство.
Уровень техники
Часто возникают ситуации, в которых устройство (такое как колесо, рукоятка или поворотная ручка) вращается. Например, поворотную ручку может вращать пользователь для управления оборудованием.
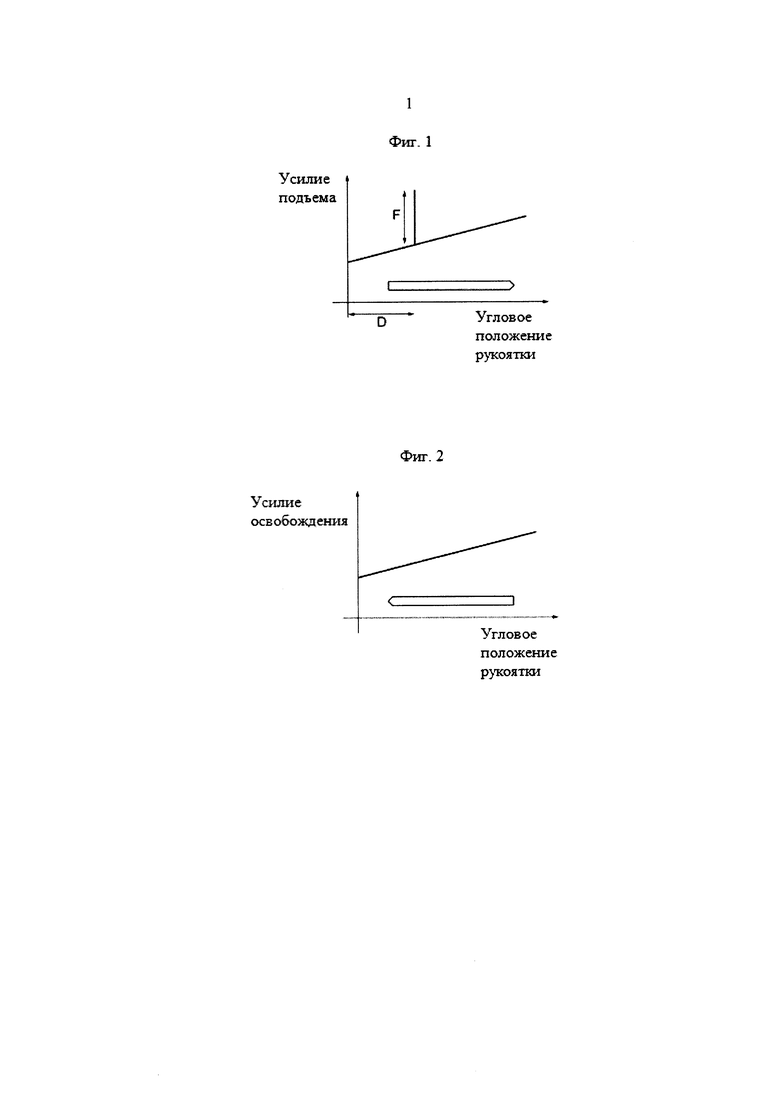
В определенных обстоятельствах желательно показать оператору, что активация устройства, которым он управляет, произошла, и это можно сделать, изменяя размер усилия, передаваемого пользователю в результате управления устройством. Усилие, передаваемое обратно пользователю, часто будет возрастать по мере продолжения вращения устройства. Но может быть желательно предусмотреть «пик» возрастающего усилия, как проиллюстрировано на Фиг. 1, так, чтобы пользователь мог узнать о том, что устройство действует, чтобы избежать непредвиденных операций со стороны устройства.
Данное изобретение направлено на устранение описанных в этом разделе проблем.
Краткое описание сущности изобретения
В данном изобретении предлагается устройство, присоединяемое к устройству ввода, активируемому пользователем, содержащее: подвижный ведущий элемент, присоединяемый к устройству ввода, и подвижный ведомый элемент, причем перемещение ведущего элемента передается ведомому элементу только после перемещения ведущего элемента на определенную величину, в котором предусмотрены средства обратной передачи усилия пользователю по мере перемещения ведущего элемента.
Могут быть предусмотрены средства торможения, предотвращающие перемещение ведомого элемента в любом направлении до передачи движения ведущего элемента ведомому элементу.
Указанный ведущий элемент и указанный ведомый элемент могут быть выполнены с возможностью вращения, причем вращение ведущего элемента передается ведомому элементу только после поворота ведущего элемента на определенную величину.
Указанный ведущий элемент и указанный ведомый элемент могут быть выполнены в форме пластин, которые как правило параллельны друг другу и вращаются вокруг оси, как правило перпендикулярной пластинам.
Один из ведущего элемента и ведомого элемента может иметь выступ, а другой из ведущего элемента и ведомого элемента может иметь продолговатый паз, в который входит выступ, так, что вращение ведущего элемента заставляет выступ перемещаться вдоль паза, пока выступ не коснется конца паза, и дальнейшее вращение ведущего элемента заставляет вращаться ведомый элемент.
Указанный паз может быть выполнен в форме щели в ведущем элементе или ведомом элементе.
Пластины, образующие ведущий элемент и ведомый элемент, могут иметь форму сектора, а устройство может дополнительно содержать ролик, прижимаемый к краям пластин прижимными средствами, такими как пружина.
Прижимные средства могут быть прикреплены к корпусу устройства.
Край пластины, образующей ведущий элемент, может иметь профиль со ступенью в нем, так, что когда ступень движется мимо ролика, прижимная пружина сжимается, и это сжатие ощущает пользователь как возрастающее усилие, передаваемое обратно пользователю.
Ступень может быть расположена так, что ролик соприкасается со ступенью в точке, где вращение ведущего элемента передается ведомому элементу, или около нее, так, что пользователь ощущает усилие, когда ведомый элемент начинает вращаться.
Ведомый элемент может иметь профиль с опережающей частью и запаздывающей частью, при этом ролик соприкасается с запаздывающей частью профиля ведомого элемента после того, как ведомый элемент начинает вращаться, а радиус запаздывающей части профиля ведомого элемента равен или больше радиуса части профиля ведущего элемента после ступени.
Радиус опережающей части профиля ведомого элемента может увеличиваться в сторону запаздывающей части профиля ведомого элемента так, что радиус в начале опережающей части профиля ведомого элемента меньше радиуса в начале профиля ведущего элемента, а радиус в конце опережающей части профиля ведомого элемента равен или больше радиуса ступени.
Краткое описание чертежей
Здесь будут описаны некоторые типовые варианты реализации данного изобретения только в качестве примера и со ссылкой на Фиг. с 1 по 11, на которых:
На Фигуре 1 в крайне схематичной форме проиллюстрировано соотношение между усилием, передаваемым обратно пользователю, и степенью действия во время активации устройства путем перемещения устройства ввода;
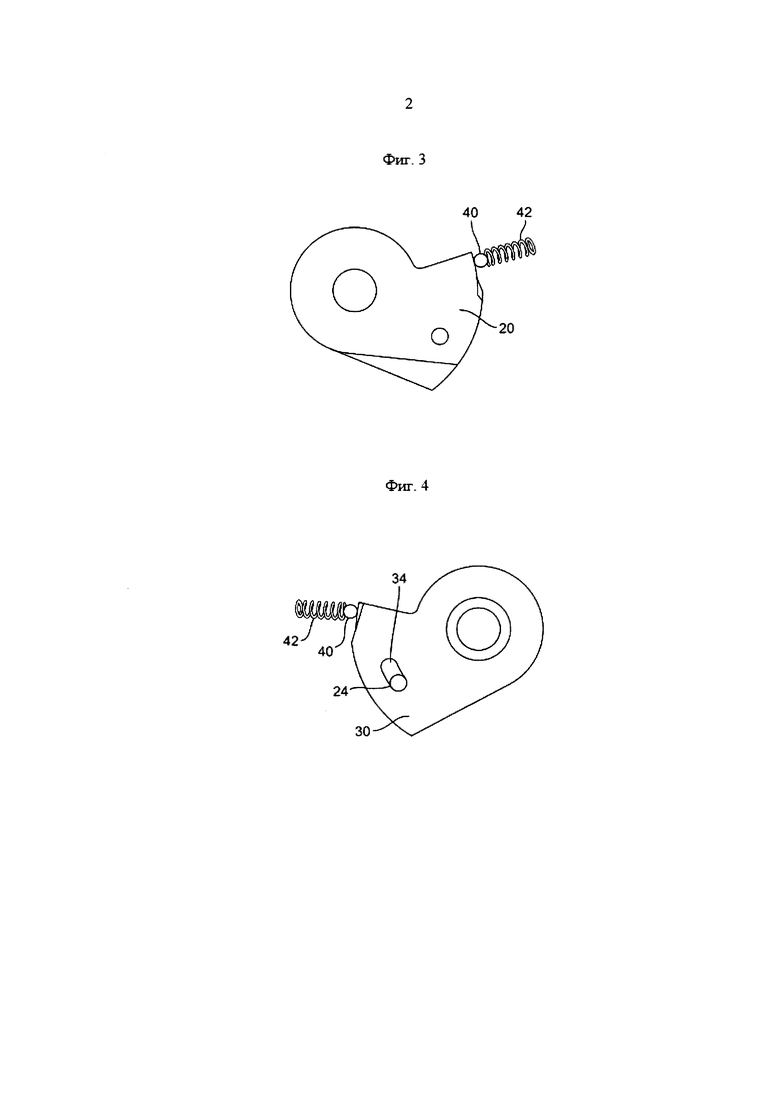
На Фигуре 2 в крайне схематичной форме проиллюстрировано соотношение между усилием, передаваемым обратно пользователю, и степенью действия во время освобождения устройства ввода;
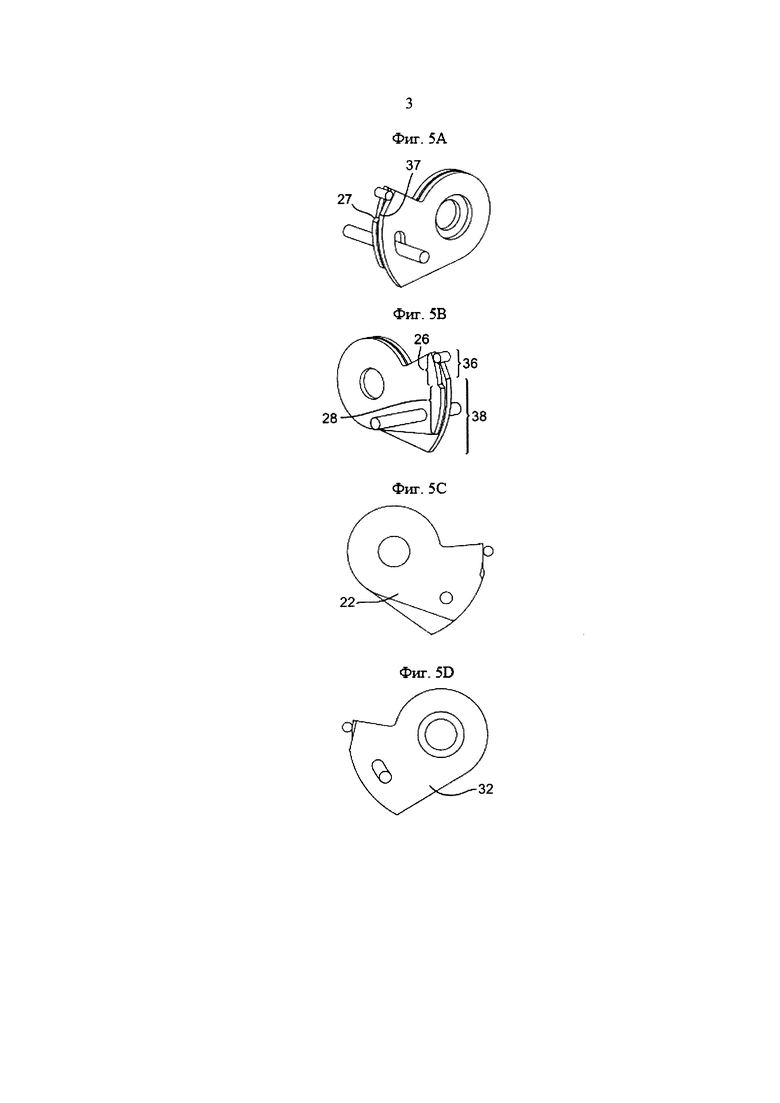
Фигура 3 иллюстрирует схематический вид слева устройства;
Фигура 4 иллюстрирует схематический вид справа устройства;
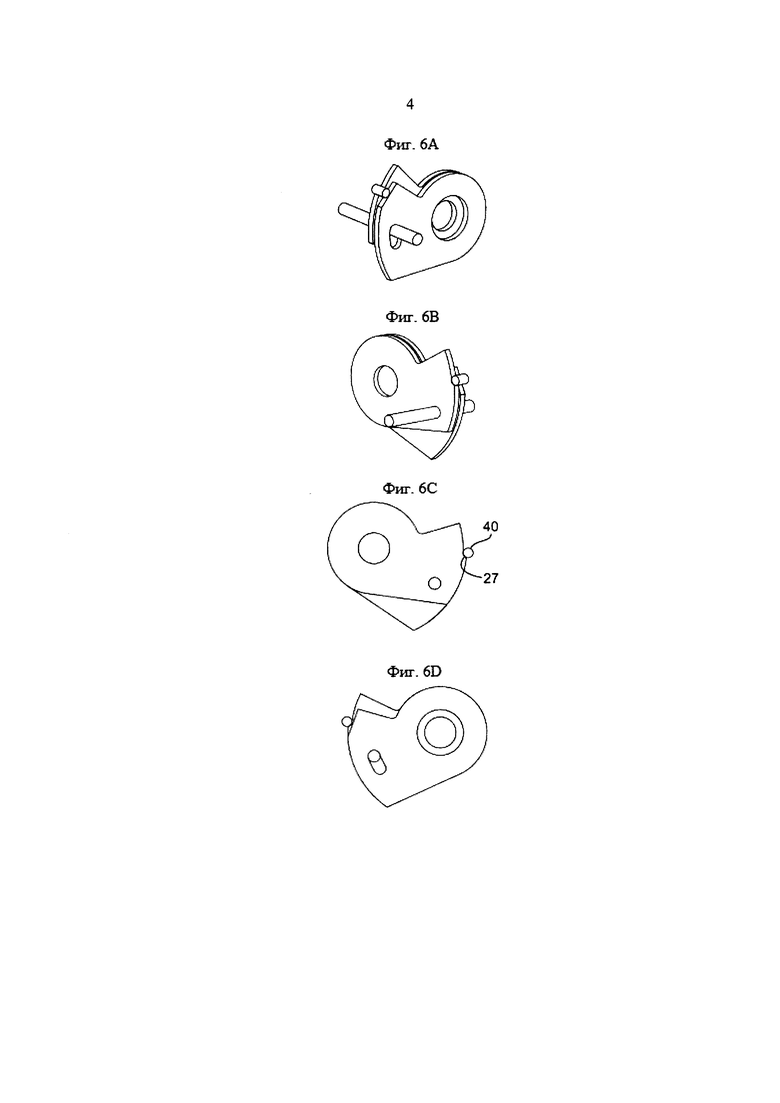
На Фигурах с 5А по 5D проиллюстрировано устройство в своем нейтральном (не активированном) положении;
На Фигурах с 6А по 6D проиллюстрировано устройство в состоянии, когда ведущий элемент готов к передаче движения ведомому элементу, со связанным пиком усилия, передаваемого обратно пользователю;
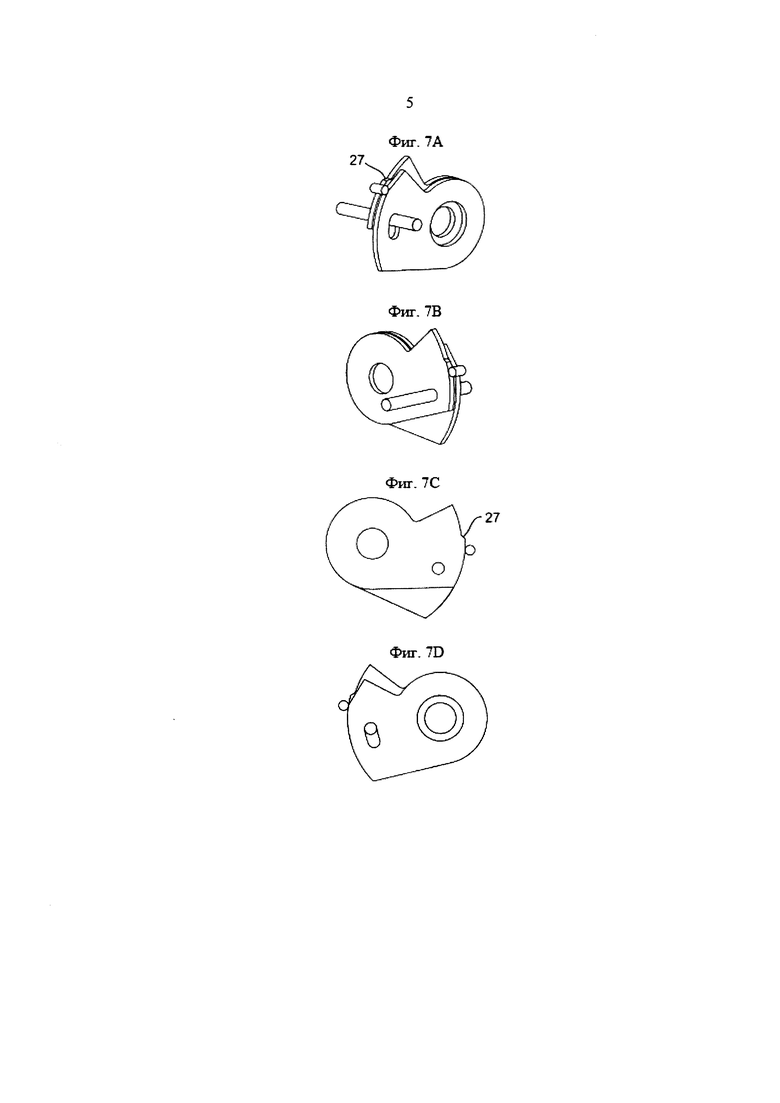
На Фигурах с 7А по 7D проиллюстрировано устройство в состоянии, когда ведущий элемент и ведомый элемент перемещаются вместе;
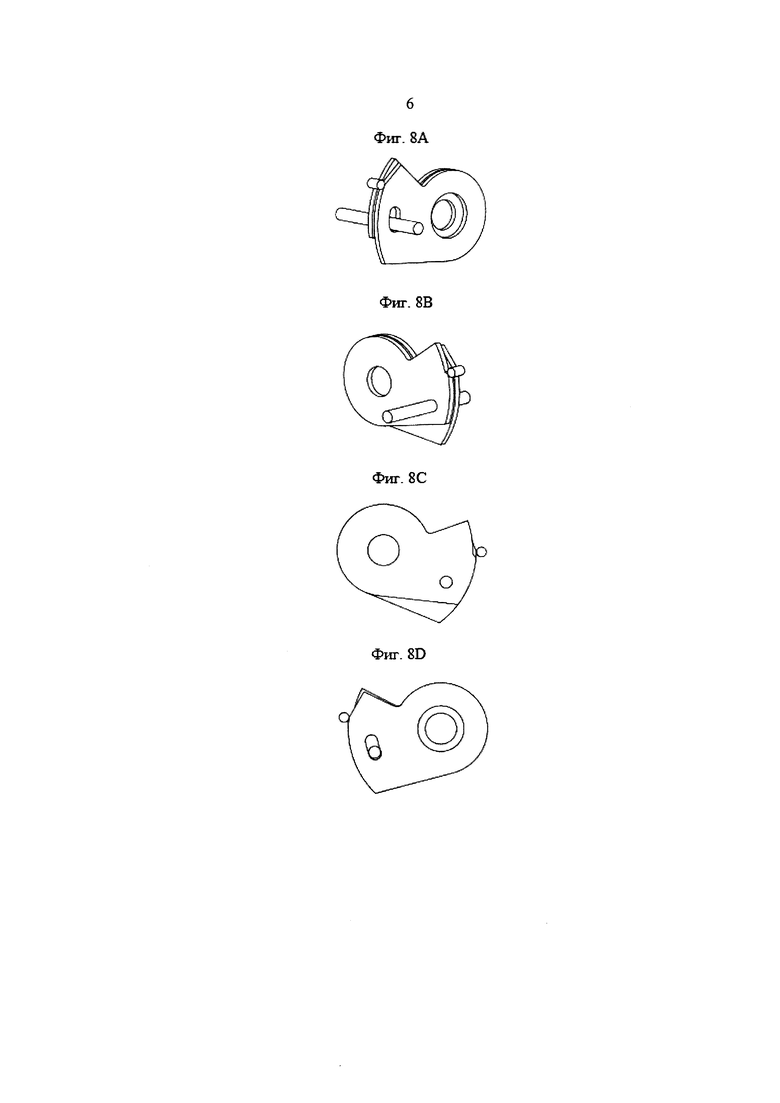
На Фигурах с 8А по 8D проиллюстрировано устройство в состоянии, когда оно возвращается в свое исходное нейтральное положение;
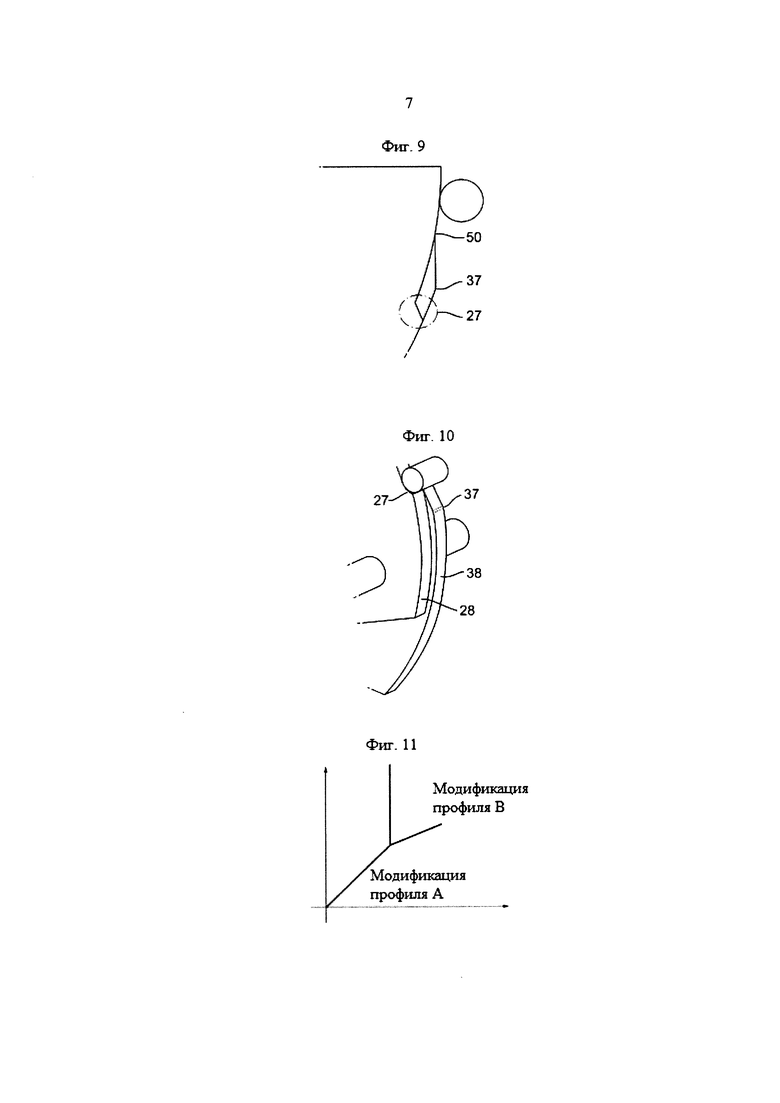
Фигура 9 иллюстрирует вид крупным планом опережающих частей профилей ведущего элемента и ведомого элемента, когда устройство находится в своем нейтральном (не активированном) положении;
Фигура 10 иллюстрирует вид в перспективе профилей ведущего элемента и ведомого элемента; и
Фигура 11 иллюстрирует вид, аналогичный Фигуре 1, но показывающий другое соотношение между усилием, передаваемым обратно пользователю, и степенью действия.
Подробное описание сущности изобретения
Устройство по данному изобретению может быть расположено между устройством ввода и управляемым устройством, но имеет более общее применение. Устройство ввода может активироваться (конкретнее, вращаться) пользователем и может представлять собой колесо, рукоятку или поворотную ручку.
Как проиллюстрировано на Фигурах 1 и 2, когда пользователь перемещает устройство ввода, усилие передается обратно пользователю. Усилие как правило соответствует степени действия устройства ввода, однако, как проиллюстрировано на Фигуре 1, пользователь ощущает «пик» передаваемого усилия (отмечен ссылкой «F») вскоре после того, как он начинает перемещать устройство ввода. Этот «пик» может информировать пользователя о том, что активация устройства вскоре начнется, и может помочь избежать случайной активации. Как проиллюстрировано на Фигуре 2, такого «пика» нет, когда устройство возвращается в свое исходное положение.
На Фигурах 1 и 2 проиллюстрировано усилие, передаваемое обратно пользователю, как правило, соответствующее степени действия устройства ввода (в том, что график зависимости усилия от положения имеет наклон). В других формах усилие, передаваемое обратно пользователю, может быть в целом постоянным (отличаться от пика), и в этом случае график зависимости усилия от положения будет в целом горизонтальным. Усилие, передаваемое обратно пользователю, может быть нулевым.
Как проиллюстрировано на Фигурах 3 и 4 (а также на Фигурах 5А, 6А, 7А и 8А), устройство 10 содержит ведущий элемент 20, который имеет вращательное соединение с устройством ввода, и ведомый элемент 30, который может быть соединен с управляемым устройством. Вращение устройства ввода заставляет вращаться ведущий элемент, а (как будет объяснено далее) вращение ведущего элемента заставляет вращаться ведомый элемент. Ведущий элемент и ведомый элемент вращаются вокруг одной оси и могут быть, например, смонтированы на одном валу.
В данном варианте реализации изобретения как ведущий элемент, так и ведомый элемент имеют вид пластин в форме сектора 22, 32, которые могут вращаться вокруг общей оси. Ведущий элемент и ведомый элемент выполнены так, что ведущий элемент может поворачиваться на небольшой угол, не заставляя вращаться ведомый элемент (то есть, между ведущим элементом и ведомым элементом имеется механизм мертвого хода).
В данном варианте реализации изобретения это достигается посредством выступа 24 на ведущем элементе 20, который выступает в сторону ведомого элемента 30, и входит в паз 34 в ведомом элементе 30 (будет понятно, что выступ и паз могут быть также расположены в обратном порядке, с выступом на ведомом элементе и пазом на ведущем элементе). Паз 34 вытянут в радиальном направлении так, что когда ведущий элемент 20 вращается, выступ 24 перемещается вдоль паза 34 в ведомом элементе 30. Как проиллюстрировано на графических материалах, паз 34 может быть выполнен в виде щели в ведомом элементе 30, а выступ 24 может проходить сквозь щель.
Длина паза ограничена, и когда устройство 10 находится нейтральном (не активированном) состоянии, выступ 24 расположен в одном конце паза 34. Начальное вращение ведущего элемента 20 из нейтрального состояния (проиллюстрировано на фигурах с 5А по 5D) будет перемещать выступ 24 вдоль паза 34, пока выступ 24 не достигнет конца паза 34 (проиллюстрировано на Фигурах с 6А по 6D). Ведущий элемент 20 и ведомый элемент 30 разделены, так, что вращательное движение ведущего элемента 20 не вызывает автоматически вращательное движение ведомого элемента 30, если необходимо, в связи с ведомым элементом 30 может быть предусмотрена некоторая форма фрикционного тормоза, предотвращающая движение в обоих направлениях.
Дальнейшее вращение ведущего элемента 20 будет толкать выступ 24 в конец паза 34, и это приводит к вращению ведомого элемента 30. Тормозное усилие, прикладываемое тормозом, относительно слабо и легко преодолевается дальнейшим вращением ведущего элемента. Таким образом, некоторое вращение ведущего элемента 20 из нейтрального состояния требуется перед тем, как повернется ведомый элемент 30, при этом пластина 22 в форме сектора ведущего элемента 20 вращается относительно пластины 32 в форме сектора ведомого элемента 30.
Хотя была описана конкретная компоновка механизма мертвого хода, подготовленный специалист поймет, что движение может передаваться между ведущим элементом и ведомым элементом любым подходящим способом.
Как упомянуто выше, как ведущий элемент 20, так и ведомый элемент 30 как правило имеет вид пластины в форме сектора 22, 32, а ролик 40 прижат к краям пластин 22, 32 прижимными средствами 42. В текущем варианте реализации изобретения прижимное средство 42 представляет собой механическую пружину, но может быть использовано любое подходящее устройство (такое как пневматическая пружина). Края пластин 22, 32 работают как кулачки, а ролик 40 работает как элемент, приводимый в движение кулачками. Пружина 42 прикреплена к корпусу устройства 10 и таким образом не двигается, когда ведущий элемент 20 и ведомый элемент 30 вращаются.
Как проиллюстрировано на Фигуре 3, профили краев пластин 22, 32 как правило кольцевые, и поэтому ролик 40 может плавно катиться по краям пластин 22, 32, когда пластины вращаются (будет понятно, что профили краев пластин 22, 32 перемещаются, а ролик 40 как правило неподвижен, однако, поскольку проще представить ролик 40, перемещающийся вдоль профилей краев пластин 22, 32, как правило следующее описание будет ссылаться на это).
Однако, некоторые зоны краев пластин 22, 32 имеют некольцевой профиль, имеющий форму, заставляющую ролик 40 двигаться так, чтобы сжимать пружину 42. Дополнительное усилие определенной величины требуется, чтобы сжать пружину 42, и это дополнительное усилие может ощущать пользователь, управляющий устройством ввода, как «пик», упомянутый ранее.
Это сжатие пружины 42 может происходить близко к началу вращения устройства ввода (и, таким образом, близко к началу вращения ведущего элемента 20), так, что пользователь узнает о вращении. Однако, будет понятно, что профили могут иметь любую желаемую форму, чтобы позволить сжатию пружины происходить в любой соответствующей точке во время управления устройством. «Пик» может ощущаться пользователем до конца свободного хода ведущего элемента, инициируемого механизмом мертвого хода. Кроме того, это сжатие может происходить в два или более этапов.
Вариант реализации устройства, описанный со ссылкой на Фигуры с 3 по 10, имеет профили, в которых сжатие пружины происходит в одной точке во время активации устройства, но подготовленный специалист поймет, что изобретение не ограничивается этой компоновкой.
Для простоты части профилей, соприкасающиеся с роликом 40, во время ранних стадий процесса вращения будут называться «опережающими частями» или «первыми частями» профилей, а части профилей, соприкасающиеся с роликом 40 во время поздних стадий процесса вращения, будут называться «запаздывающими частями» или «вторыми частями» профилей.
Как подробно проиллюстрировано на Фигурах 5А и 5 В, ведущий элемент 20 имеет профиль, содержащий первую часть 26 постоянного радиуса и вторую часть 28 постоянного радиуса, причем радиус второй части 28 немного больше чем радиус первой части 26. Первая часть 26 и вторая часть 28 соединены ступенью 27, на которую может накатываться ролик 40. Когда ролик 40 накатывается на ступень 27, прижимная пружина 42 сжимается, чтобы обеспечить «пик».
В этом варианте реализации изобретения ведущий элемент 20 и ведомый элемент 30 устроены так, что когда ведущий элемент 20 вращается приведением в действие устройства ввода, ступень 27 на ведущем элементе 20 достигает ролика 40 в то же время (или чуть-чуть раньше), когда выступ 24 на ведущем элементе 20 достигает конца паза 34 в ведомом элементе 30. Таким образом, пользователь ощущает «пик», когда (или непосредственно перед тем, как) ведомый элемент 30 начинает движение. Если пользователь приводит в действие устройство ввода случайно, то этот «пик» сообщает ему об операции, и тогда он может вернуть устройство ввода в его исходное (не активированное) состояние.
Однако, если пользователь оперирует устройством ввода намеренно, то он может продолжить вращение устройства ввода после «пика». Как объяснено выше, это приведет к вращению ведомого элемента 30.
В этом варианте реализации изобретения «пик» происходит, когда ведомый элемент начинает вращаться. Однако, как объяснено выше, изобретение не ограничивается этим, и «пик» может иметь место до или после начала вращения ведомого элемента. Кроме того, ведущий элемент и ведомый элемент могут быть устроены так, чтобы пользователь ощущал более одного «пика» во время операции.
Опережающая часть 36 профиля ведомого элемента 30 представляет собой сектор с постепенно увеличивающимся радиусом, а запаздывающая часть 38 профиля ведомого элемента 30 представляет собой сектор с постоянным радиусом. Две части 36, 38 профиля ведомого элемента соединены гладко (в точке 37).
Радиус в начале ранней части 36 профиля ведомого элемента 30 меньше радиуса первой части 26 профиля ведущего элемента 20. Кроме того, радиус запаздывающей части 38 профиля ведомого элемента 30 равен или (предпочтительно) совсем немного больше радиуса второй части 28 профиля ведущего элемента 20. Поскольку опережающая часть 36 и запаздывающая часть 38 профиля ведомого элемента 30 соединены гладко, следовательно, радиус в конце ранней части 36 профиля ведомого элемента 30 такой же, как радиус поздней части 38 профиля ведомого элемента 30, а значит равен или совсем немного больше радиуса второй части 28 профиля ведущего элемента 20. Таким образом, радиус ранней части 36 профиля ведомого элемента 30 увеличивается от значения, меньшего, чем радиус первой части 26 профиля ведущего элемента 20 до значения, равного или совсем немного большего, чем радиус второй части 28 профиля ведущего элемента 20.
Когда ведомый элемент 30 приводится во вращение в результате продолжения вращения ведущего элемента 20 (как проиллюстрировано на Фигурах с 6А по 6D, которые показывают состояние, в котором выступ 24 на ведущем элементе 20 достигает конца паза 34, сформированного в ведомом элементе 30, и Фигурах с 7А по 7D, которые показывают, что как ведущий элемент 20, так и ведомый элемент 30 вращались из соответствующих положений, как проиллюстрировано на Фигурах с 6А по 6D), ролик 40 перемещается вдоль начала второй части 28 профиля ведущего элемента 20. Затем ролик 40 соприкасается с концом опережающей части 36 профиля ведомого элемента 30, который, как упомянуто выше, имеет радиус, равный или совсем немного больший радиуса второй части 28 профиля ведущего элемента 20. Если радиус конца опережающей части 36 профиля ведомого элемента совсем немного больше радиуса второй части 28 профиля ведущего элемента 20, прижимная пружина 42 сжимается совсем немного; однако, сжатие достаточно мало, так что это не побуждает пользователя ощутить увеличение усилия, передаваемого обратно пользователю.
Тогда ролик 40 перемещается по гладкому соединению 37 между опережающей частью 36 и запаздывающей частью 38 профиля ведомого элемента 30, и последующее вращение ведущего элемента 20 и ведомого элемента 30 продолжает перемещать ролик 40 по запаздывающей части 38 профиля ведомого элемента 30. Поскольку эта часть профиля ведомого элемента 30 имеет постоянный радиус, дальнейшего сжатия прижимной пружины 42 не происходит.
В альтернативной форме запаздывающая часть 38 профиля ведомого элемента 30 может иметь постепенно увеличивающийся радиус. С этой компоновкой пружина 42 будет постепенно сжиматься по мере перемещения ролика 40 по запаздывающей части 38 профиля ведомого элемента 30, а значит усилие, требуемое для постепенного сжатия пружины 42, будет ощущаться пользователем как постепенно увеличивающееся усилие обратной связи.
Аналогичным образом, первая часть 26 профиля ведущего элемента 20 не должна быть кольцевой, и может также иметь постепенно увеличивающийся радиус, так, что пользователь будет ощущать постепенно возрастающее усилие обратной связи в начале вращения ведущего элемента.
Если как первая часть 26 профиля ведущего элемента 20, так и запаздывающая часть 38 профиля ведомого элемента 30 имеют увеличивающиеся радиусы, то пользователь будет ощущать постепенно возрастающее усилие обратной связи во время вращения ведущего элемента. Если скорости увеличения радиусов различны, то пользователь будет ощущать изменение величины возрастания усилия обратной связи, как схематически проиллюстрировано на Фигуре 11. Первая часть 26 профиля ведущего элемента 20 соответствует «модификации профиля А», а запаздывающая часть 38 профиля ведомого элемента 30 соответствует «модификации профиля В». Если это изменение достаточно очевидно, то может отсутствовать необходимость в обеспечении «пика» усилия обратной связи, и поэтому можно обойтись без ступени 27.
Когда устройство должно быть возвращено в свое исходное состояние, устройство ввода вращают в противоположном направлении, и при этом ведущий элемент 20 вращается обратно в сторону своего исходного положения. Поскольку ведущий элемент 20 и ведомый элемент 30 не соприкасаются (иначе чем посредством выступа 24 и паза 34), и движение ведомого элемента тормозится фрикционным тормозом, вращательное движение ведущего элемента 20 не вызывает вращательного движения ведомого элемента 30, и поэтому ведомый элемент 30 сначала не движется. Таким образом, ролик 40 остается в соприкосновении с той же областью на профиле ведомого элемента 30.
Однако, выступ 24 на ведущем элементе 20 будет перемещаться обратно вдоль паза 34 в ведомом элементе 30, пока он не соприкоснется с концом паза 34, где он был расположен изначально (как проиллюстрировано на Фигурах с 8А по 8D). В этой точке относительные положения ведущего элемента 20 и ведомого элемента 30 будет таким же, как когда движение ведущего элемента 20 начиналось (как можно увидеть, сравнивая Фигуры с 5А по 5D с Фигурами с 8А по 8D). Однако, угловые положения ведущего элемента 20 и ведомого элемента 30 относительно ролика 40 отличаются (как снова можно увидеть, сравнивая Фигуры с 5А по 5D с Фигурами с 8А по 8D).
Последующее вращение ведущего элемента 20 в сторону своего исходного положения преодолеет усилие торможения фрикционного тормоза и будет перемещать ведомый элемент 30, и в результате ролик 40 будет перемещаться по профилям ведущего элемента 20 и ведомого элемента 30.
Поскольку радиус запаздывающей части 38 профиля ведомого элемента 30 больше радиуса второй части 28 ведущего элемента 20, ролик будет перемещаться вдоль профиля ведомого элемента 30 по мере вращения ведущего элемента 20 и ведомого элемента 30 обратно в их исходные положения. Далее ролик 40 будет перемещаться по гладкому соединению 37 между запаздывающей частью 38 и опережающей частью 36 профиля ведомого элемента 30 (как проиллюстрировано на Фигуре 9), а затем будет перемещаться вдоль опережающей части 36 профиля ведомого элемента 30.
Как упомянуто выше, радиус опережающей части 36 профиля ведомого элемента 30 постепенно уменьшается, пока не станет меньше радиуса первой части 26 профиля ведущего элемента 20. Таким образом, ролик 40 будет перемещаться вдоль опережающей части 38 профиля ведомого элемента 30 до точки, в которой уменьшающийся радиус будет равен радиусу первой части 26 профиля ведущего элемента 20 (точка 50 на Фигуре 9). Затем продолжающееся движение ведущего элемента 20 и ведомого элемента 30 будет перемещать ролик 40 вдоль первой части 26 профиля ведущего элемента 20, пока ролик в конце концов не окажется в своем исходном положении (как проиллюстрировано на Фигурах с 5А по 5D).
Во время возвратного движения ролика 40 прижимная пружина 42 постепенно разжимается. Ни в одной точке возвратного движения пружина 42 не сжимается далее, и поэтому в усилии на возвратном пути отсутствует «пик», как можно увидеть на Фигуре 2. Однако, в альтернативных вариантах реализации изобретения профили ведущего элемента и ведомого элемента могут быть скомпонованы так, чтобы содержать ступень, и таким образом обеспечивать «пик» усилия во время возвратного пути, если это необходимо или желательно.
Могут быть предусмотрены средства (не проиллюстрированы), толкающие ведущий элемент 20 в его не активированное положение, так, что устройство 10 возвращается в свое нейтральное (не активированное) состояние, когда пользователь отпускает устройство ввода. Эти средства могут принимать форму винтовой пружины или подобную, расположенной вокруг вала, на котором вращаются ведущий элемент 20 и ведомый элемент 30. Эти средства предпочтительно относительно слабы, так, что пользователь устройства может легко преодолеть создаваемое ими усилие.
Кроме того, в варианте реализации изобретения, описанном выше, ведущий элемент имеет вращательное соединение с устройством ввода, а также ведущий элемент и ведомый элемент вращаются вокруг одной оси. Однако, возможно также перемещение ведущего элемента и ведомого элемента по прямой линии. Ведущий элемент и ведомый элемент могут иметь форму в целом прямолинейных пластин (или пластин любой другой подходящей формы, в зависимости от конкретного применения устройства), с краем каждой пластины, образующим профили ведущего элемента и ведомого элемента.
Устройство обеспечивает обратную связь с пользователем, чтобы сообщать ему об активации устройства, и таким образом помогает избежать случайной активации с помощью простой конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ОБНАРУЖЕНИЯ НЕЗАКОННЫХ ДЕЙСТВИЙ, УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ БУМАЖНЫХ ЛИСТОВ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БУМАЖНЫХ ЛИСТОВ | 2018 |
|
RU2750042C1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| Способ получения пружинных ламелей из форматной заготовки с одновременным получением готового закругленного профиля ребер и устройство для его реализации с механизмом подачи и перемещения, включающим систему поджима, фрезерным блоком и фрезерным диском, включая способ перемещения форматной заготовки, а также способ фрезерования и раскроя | 2016 |
|
RU2648110C2 |
| КОНВЕЙЕР ДЛЯ МЕЛКОЙ ТАРЫ | 2009 |
|
RU2509705C2 |
| ПЫЛЕСОС (ВАРИАНТЫ) | 2008 |
|
RU2375951C2 |
| ФРИКЦИОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ БУМАЖНЫХ ЛИСТОВ | 2023 |
|
RU2840174C2 |
| МУФТА ПРИВОДА БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2014 |
|
RU2622510C1 |
| Устройство для обработки труб под сварку | 1988 |
|
SU1556828A1 |
| Устройство для изготовления электроизоляционных трубок | 1988 |
|
SU1686498A1 |
| ВАРИАТОР СКОРОСТИ | 1991 |
|
RU2006724C1 |
Изобретение относится к управлению оборудованием, а более конкретно к устройствам, присоединяемым к устройству ввода. Устройство обратной связи с пользователем, присоединяемое к устройству ввода, активируемому пользователем, содержит подвижный ведущий элемент и ведомый элемент. Подвижный ведущий элемент присоединен к устройству ввода. Движение ведущего элемента передается ведомому элементу только после перемещения ведущего элемента на определенную величину, в котором предусмотрены средства обратной передачи усилия пользователю по мере перемещения ведущего элемента в одном направлении. Достигается удобство в пользовании. 10 з.п. ф-лы, 23 ил.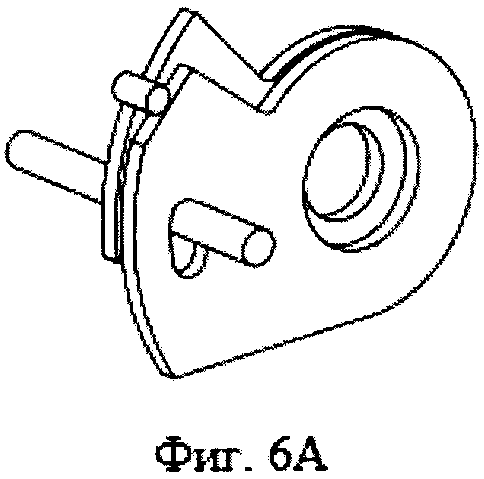
1. Устройство обратной связи с пользователем, присоединяемое к устройству ввода, активируемому пользователем, содержащее:
подвижный ведущий элемент, присоединяемый к устройству ввода; и
подвижный ведомый элемент;
причем движение ведущего элемента передается ведомому элементу только после перемещения ведущего элемента на определенную величину;
в котором предусмотрены средства передачи усилия обратно пользователю по мере перемещения ведущего элемента;
причем указанный ведущий элемент и указанный ведомый элемент выполнены с возможностью вращения в одном направлении от исходного положения, а также в другом направлении обратно в исходное положение, причем вращение ведущего элемента передается ведомому элементу только после поворота ведущего элемента на определенную величину; и
причем предусмотрены средства для передачи пика усилия обратно пользователю вскоре после вращения ведущего элемента от исходного положения, но не во время возврата устройства в исходное положение.
2. Устройство по п. 1, в котором предусмотрены средства торможения, предотвращающие движение ведомого элемента в любом направлении до передачи движения ведущего элемента ведомому элементу.
3. Устройство по п. 1, отличающееся тем, что указанный ведущий элемент и указанный ведомый элемент выполнены в форме пластин, в целом параллельных друг другу и вращающихся вокруг одной оси, в целом перпендикулярной пластинам.
4. Устройство по п. 1 или 3, отличающееся тем, что:
один из ведущего элемента и ведомого элемента имеет выступ;
другой из ведущего элемента и ведомого элемента имеет продолговатый паз, подходящий для приема выступа;
так, что вращение ведущего элемента вызывает перемещение выступа вдоль паза до соприкосновения выступа и конца паза, а дальнейшее вращение ведущего элемента вызывает вращение ведомого элемента.
5. Устройство по п. 4, отличающееся тем, что указанный паз выполнен в форме щели в ведущем элементе или ведомом элементе.
6. Устройство по п. 3 или любому зависимому от него пункту, отличающееся тем, что пластины, образующие ведущий элемент и ведомый элемент, имеют форму сектора, а устройство дополнительно содержит ролик, прижимаемый к краям пластин прижимными средствами, такими как пружина.
7. Устройство по п. 6, отличающееся тем, что прижимные средства прикреплены к корпусу устройства.
8. Устройство по п. 6 или 7, отличающееся тем, что край пластины, образующей ведущий элемент, имеет профиль со ступенью в нем, так что движение ступени мимо ролика вызывает сжатие прижимной пружины, и это сжатие пользователь ощущает как возрастающее усилие, передаваемое обратно пользователю.
9. Устройство по п. 8, отличающееся тем, что ступень расположена так, что ролик соприкасается со ступенью ведущего элемента в точке передачи вращения ведущего элемента ведомому элементу или около нее, так что пользователь ощущает усилие в начале вращения ведомого элемента.
10. Устройство по п. 8 или 9, отличающееся тем, что ведомый элемент имеет профиль с ранней частью и поздней частью, а радиус запаздывающей части профиля ведомого элемента равен или больше радиуса части профиля ведущего элемента после ступени.
11. Устройство по п. 10, отличающееся тем, что радиус опережающей части профиля ведомого элемента увеличивается в сторону запаздывающей части профиля ведомого элемента так, что радиус в начале опережающей части ведомого элемента меньше радиуса в начале профиля ведущего элемента, а радиус в конце опережающей части профиля ведомого элемента равен или больше радиуса ступени.
| JP 2005126022 A, 19.05.2005 | |||
| US 3442146 A1, 06.05.1969 | |||
| US 3902375 A, 02.09.1975 | |||
| RU 2001121481 A, 27.06.2003. |

