Область техники
Предлагаемый способ относится к области авиационной техники, а именно к способам управления полетом малогабаритных роботизированных беспилотных летательных аппаратов (РБЛА).
Его использование в системах автоматического управления полетом (САУП) РБЛА позволит повысить возможность выполнения полетного задания в автономном режиме, то есть при отсутствии командного радиоканала дистанционного управления (КРДУ) и в условиях искаженного или подавленного навигационного поля (НП), обеспечив безопасность выполнения полетов.
Уровень техники
Малогабаритные РБЛА применяют в труднодоступных районах для мониторинга и охраны транспортных сетей топливно-энергетического комплекса, патрулирования транспортных магистралей, лесных массивов и охраняемых территорий, наблюдения за погодными условиями, проведения геодезических исследований, в разведывательно-поисковых целях и аэрофотосъемок объектов и местности.
Наиболее активно используют малогабаритные РБЛА силовые ведомства, при этом РБЛА должны обеспечивать выполнение поставленных полетных задач в условиях сложной сигнально-помеховой остановки:
- при движении вне зоны прямой радиовидимости от наземной станции управления, например на удаленных расстояниях, в местах с горным рельефом местности или с высотной городской застройкой, то есть когда отсутствует КРДУ;
- при возникновении искажений сигналов спутниковых навигационных систем (СНС) за счет возмущений в ионосфере или тропосфере, или в результате многолучевых переотражений от окружающих объектов естественного или искусственного происхождения, а также за счет сигналов радиорелейных станций операторов сотовой связи, то есть когда на навигационное поле (НП) воздействуют естественные или непреднамеренные помехи;
- при энергетическом подавлении сигналов СНС помехами, создаваемыми средствами прерывания полета РБЛА, или при подмене навигационных координат СНС средствами активного спуфинга, то есть когда на НП воздействуют преднамеренные помехи.
Анализ современного уровня техники показал, что наиболее уязвимым местом для помехового воздействия на РБЛА является приемник СНС, данные которого используются для коррекции бесплатформенной инерциальной навигационной системы (БИНС). Это связано с малой мощностью принимаемых навигационных сигналов. В результате радиус подавления сигналов СНС системами радиоэлектронной борьбы (РЭБ) типа REX 1, REX 2, ZALA ZONT составляет 2 км, а радиус подавления сигналов КРДУ-0,5км [1].
При наличии помех приемники СНС не могут обеспечить требуемого уровня надежности навигационных измерений по показателям целостности, доступности и непрерывности. Большие погрешности навигационных измерений могут привести к невыполнению полетного задания, а кроме того к аварии или потере РБЛА за счет непреднамеренных столкновений с естественными или искусственными препятствиями, либо с земной поверхностью.
В случае сложной сигнально-помеховой обстановки выполнение РБЛА полетного задания возможно только в автономном режиме. Под автономным режимом будем понимать автономное движение РБЛА, когда отсутствует КРДУ и оператор не может повлиять на управление даже в критических ситуациях, и когда НП подвергается искажению или подавлению, при этом невозможна коррекция БИНС от навигационных данных СНС, при этом весь процесс управления движения возлагается на заложенный в САУП алгоритм.
В автономном режиме работа навигационной системы РБЛА и, соответственно, его безопасный полет возможен только за счет БИНС, благодаря ее автономности и возможности с высокой скоростью обновления выдавать потребителю необходимые данные для ориентации и навигации.
Однако БИНС присущи недостатки, которые не позволяют использовать их долгое время без коррекции от навигационных данных СНС. Это вызвано тем, что ее измерительные датчики - гироскопы и акселерометры, характеризуются собственными систематическими и случайными погрешностями, имеющими свойство накапливаться со временем.
В связи с этим актуальной становится проблема управления движением РБЛА в автономном режиме. В результате анализа известных технических решений установлено, что эффективные способы автоматического управления движением малогабаритных РБЛА в автономном режиме отсутствуют.
Таким образом, возникает потребность в решении изобретательской (неочевидной) задачи, заключающейся в разработке способа автоматического управления движением малогабаритного РБЛА в автономном режиме без дополнительных аппаратных затрат из-за наличия ограничений на его массогабаритные показатели. Разрабатываемый способ должен базироваться на использовании дополнительных навигационных параметров, поступающих в САУП из приемника СНС, БИНС, датчиков высоты и скорости, а также данных, полученных в процессе обработки этих параметров, т.е. реализовываться программными средствами в вычислителе САУП.
Характеристика аналогов технического решения
Так известна система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по заявке эксплуатанта БЛА-ТС [описание изобретения к патенту РФ №2676519 от 10.01.2018, МПК G08G 5/00; G05D 1/00, опубл. 29.12.2018, Бюл. №1]. Данная система на основе модели маршрута, рассчитанной ЦКУД, включенной в суточный план движения и направленной ЦКУД в виде формализованного плана движения автопилоту БЛА-ТС, и выполняемого автопилотом движения БЛА-ТС с передачей динамических координат, установленных по сигналам глобальных навигационных спутниковых систем (ГНСС), таких как ГЛОНАСС/GPS/др. систем, транспондером беспилотника в ЦКУД, под контролем ЦКУД, осуществляющим постоянное сравнение динамических координат БЛА-ТС с координатами плана движения и модели маршрута, и управлением автопилотом БЛА-ТС командами корректировки параметров движения и маршрута, поступающими из ЦКУД сигналами по защищенному каналу связи, до остановки БЛА-ТС.
Недостаток указанного изобретения состоит в том, что способ, реализованный в данной системе, не позволяет осуществить автоматическое управление движением РБЛА в автономном режиме, следовательно, выполнить полетное задание в условиях отсутствия КРДУ. Кроме того, данная система не имеет возможностей обнаруживать факт искажения НП и идентифицировать вид помехового воздействия на приемник СНС, следовательно, вырабатывать управляющие команды для осуществления движения РБЛА в автономном режиме при искаженном или подавленном НП, обеспечивая при этом безопасность полетов.
Известен способ для безопасных полетов БЛА в гражданском воздушном пространстве [Заявка US №2008033604, МПК G05D 1/00; G06F 17/00; G05D 1/00; G06F 17/00, опубл. 07.02.2008 г.]. В состав указанной системы входит наземная станция управления (НСУ), оборудованная устройством визуализации, удаленный пилот-оператор на НСУ и система передачи данных между БЛА и НСУ. Метод позволяет пилоту-оператору контролировать полет БЛА с помощью трехмерного синтезируемого изображения. Во время полета бортовая система БЛА периодически транслирует свой идентификатор, местоположение, высоту и азимут. По полученным от БЛА данным в системе визуализации генерируется и отображается на экране монитора обстановка вокруг текущего местоположения БЛА. Пилот-оператор, анализируя данное изображение, воздействует на органы системы управления полетом, чьи сигналы транслируются обратно на БЛА. В течение тех фаз полета, когда система визуализации не используется для управления, БЛА выполняет полет под управлением бортовой автономной системы. Дополнительно обеспечивается канал связи с системой управления воздушным движением и пилотами других летательных аппаратов, имеющих прямую связь с указанным пилотом-оператором.
Недостатком указанного изобретения является то, что для передачи управляющих сигналов на борт РБЛА от органов управления, на которые воздействует пилот-оператор, требуется наличие широкополосного КРДУ, что также ограничивает реализуемость способа только зоной прямой радиовидимости и, следовательно, не позволяет обеспечить автономность полетов РБЛА. Кроме того, данный способ не позволяет обнаруживать факт искажения НП и идентифицировать вид помехового воздействия на приемник СНС, а также сформировать управляющие команды для осуществления движения РБЛА в автономном режиме в сложной сигнально-помеховой обстановке, обеспечивая при этом безопасность полетов.
Также известен способ управления одним или несколькими беспилотными летательными аппаратами (БЛА), каждый из которых оборудован бортовой автоматической системой управления [патент РФ №2390815, МПК G05D 1/00, опубл. 27.05.2010 г.]. В известном способе управления одним или несколькими БЛА, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией и со стационарным или подвижным пунктом управления, оборудованным автоматизированным рабочим местом оператора, при этом передача команд управления движением БЛА, данных о координатах и параметрах его движения, идентификационных номеров, находящихся в пределах радиовидимости, производится в радиоканалы, причем трансляция сообщений передающей радиостанции производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд.
Недостатком способа управления БЛА по патенту №2390815 является то, что он реализуем только в зоне прямой радиовидимости, его невозможно использовать при значительном увеличении дальности полета и вне условий прямой радиовидимости, кроме того, для передачи команд управления требуется широкополосная система радиосвязи, для которой характерны низкие помехозащищенность и помехоустойчивость. В результате данный способ не позволяет управлять движением РБЛА в автономном режиме полета и в режиме реального времени, обеспечивая при этом безопасность полетов.
Характеристика выбранного прототипа
Наиболее близким к заявленному изобретению по своей технической сущности и достигаемому результату является способ управления беспилотным летательным аппаратом [патент РФ №2562890, МПК B64C 39/00, G05D 1/00, опубл. 10.09.2015 г.].
В известном способе управления БЛА, который оборудован бортовой автоматической системой управления, спутниковой навигационной системой, датчиком времени, представляющим собой высокоточные часы для синхронизации времени, приемо-передающей радиостанцией, передачу команд управления движением БЛА и передачу данных о координатах и параметрах его движения осуществляют через основой спутниковый канал связи со стационарного или подвижного пункта управления, оборудованного автоматизированным рабочим местом оператора, учитывают компенсацию задержки в канале передачи команд управления, используя спутниковый канал связи, определяя динамические характеристики воздействия на систему управления БЛА, а для посадки БЛА в четко заданной точке транслируют через спутниковый канал связи команды управления посадкой БЛА, которую осуществляют на площадку, выбранную оператором по информации, передаваемой с блока автоматизированной системы управления борта БЛА, оборудованного видеокамерой, при этом команды управления БЛА включают навигационные данные о поворотных пунктах маршрута с указанием их географических координат, заданных ортодромических путевых углов, величин бокового упреждения разворота, ограничений на величину крена при выполнении разворота, заданные значения высоты полета, вертикальной скорости и угла наклона траектории, а также отсчет момента измерения указанных данных по шкале единого времени, причем данные об изменении конкретного параметра согласуются с возможными перегрузками и предельными режимами полета БЛА и реализуются рядом последовательных изменений этого параметра, приоритет системы управления полетом - пилотируемой или с помощью автопилота, определяется оператором; управление БЛА при перерыве в получении информации от спутниковой системы навигации осуществляют по данным инерционной системы навигации, а при перерыве в получении команд от оператора полет осуществляется по заложенной аварийной программе или по программе полета, движения по траектории, заложенной в автопилоте; возможную временную задержку исполнения команд управления определяют с учетом времени распространения сигнала от БЛА через ретранслятор геостационарного спутника к пункту управления и обратно, времени считывания информации с датчиков положения и движения БЛА и состояния бортовых систем БЛА, а также времени задержки сигнала в буферных устройствах линии формирования и передачи команд; в пункте управления по данным о текущих координатах и параметрах движения БЛА, которые получены по основному спутниковому каналу, формируют двух- или трехмерное изображение воздушной обстановки на экране монитора автоматизированного рабочего места оператора; сообщение, передаваемое бортовой радиостанцией БЛА, включает данные о параметрах внешней среды, характеризующие температуру и атмосферное давление на высоте полета, а также данные о состоянии бортового оборудования и систем; команды управления формируют с учетом динамических характеристик БЛА и его бортовой автоматической системы управления с учетом внешних возмущений, неисправностей и отказов бортового оборудования; сообщения о командах управления и данных о координатах и параметрах движения БЛА перед передачей в основной спутниковый канал связи зашифровывают, а на приемном конце дешифруют.
Указанный способ принят за прототип.
Достоинство данного способа (прототипа) заключается в повышении эффективности управления РБЛА за счет возможности определения положения РБЛА при значительном увеличении дальности полета и вне зоны прямой радиовидимости при его движении как в режиме полета по траектории, так и в управлении полетом в пилотируемом режиме реального времени, а также для обеспечения безопасной посадки в четко заданной точке за счет возможности учета компенсации задержки в канале передачи команд управления при использовании спутникового канала связи, а в связи с этим в повышении уровня безопасности выполнения полетов в воздушном пространстве.
Вместе с тем данный способ, являющийся прототипом, обладает недостатками. Во-первых, для его реализации в типовой САУП требуется наличие дополнительного приемника для спутникового канала связи, применение которого увеличивает массогабаритные показатели РБЛА, при этом спутниковый канал связи также эффективно подавляется средствами РЭБ. Во-вторых, способ не имеет возможности обнаруживать факт искажения НП и идентифицировать вид помехового воздействия на приемник СНС, и, исходя из этого, вырабатывать управляющие команды для осуществления движения РБЛА в автономном режиме в сложной сигнально-помеховой обстановке. В-третьих, при подавленном НП не обеспечивается безопасность полетов из-за большой погрешности местоопределения РБЛА, приводящей к непреднамеренным столкновениям его с естественными или искусственными препятствиями, либо земной поверхностью. Следовательно, способ-прототип не позволяет реализовать автоматическое управление движением РБЛА в автономном режиме.
Задача и технический результат изобретения
Задача изобретения - повышение эффективности автоматического управления движением РБЛА в автономном режиме, т.е. при отсутствии КРДУ и искаженном или подавленном НП, а также обеспечение безопасности полетов в этом режиме.
Технический результат изобретения заключается в обеспечении возможности выполнения полетного задания в автономном режиме полета РБЛА при отсутствии КРДУ и искаженном или подавленном НП, а также в обеспечении безопасности его полетов.
Указанный технический результат достигается тем, что в известный способ автоматического управления движением РБЛА в автономном режиме, который оборудован САУП, содержащей БИНС, реализованную на акселерометрах, гироскопах, магнитометрах и цифровом процессоре движения (ЦПД), приемник СНС, блок датчиков высоты и скорости, контроллер системы бортового питания (СБП), вычислитель, автопилот и исполнительные устройства, заключающийся в том, что комплексирование БИНС и приемника СНС в интегрированную навигационную систему (ИНС) по слабо связанной схеме осуществляют с помощью вычислителя путем реализации Калмановской фильтрации, за счет которой на основании измерений полученных от приемника СНС формируют оценку вектора состояния потребителя и разность навигационных параметров от БИНС и приемника СНС, которые используют для компенсации ошибок БИНС, сформированное в вычислителе навигационное решение передают в автопилот, с помощью которого через исполнительные устройства осуществляют управление ориентацией и движением РБЛА, реализуя программный полет по заданным точкам, при движении по маршруту определяют динамические координаты по сигналам СНС и передают их в вычислитель, в котором осуществляется сравнение полученных динамических координат с координатами плана движения и моделью маршрута, записанного в памяти вычислителя, в случае несовпадения координат передают команды автопилоту для корректировки параметров движения и маршрута на всем цикле движения до остановки (посадки) РБЛА, вырабатываемые вычислителем команды управления РБЛА включают навигационные данные о поворотных пунктах маршрута с указанием их географических координат, заданных ортодромических путевых углов, ограничений на углы пространственной ориентации при выполнении разворота, заданные значения высоты полета, путевой скорости, а также отсчет момента измерения указанных данных по шкале единого времени, причем данные об изменении конкретного параметра согласуются с возможными перегрузками и предельными режимами полета РБЛА и реализуются рядом последовательных изменений этого параметра, введена совокупность отличительных признаков, с помощью которых в процессе движения РБЛА в автономном режиме по заданному маршруту постоянно оценивают состояние навигационного поля (НП) и при необходимости идентифицируют виды помехового воздействия, когда НП находится в нормальном или допустимо искаженном состоянии, то продолжают выполнять коррекцию БИНС от навигационных данных приемника СНС, производят расчет расстояния и времени полета до навигационной точки назначения, выдают команду на выполнение маневра «Полет в точку с заданными координатами», в случае, когда НП оказывается в состоянии энергетического подавления или изменяется под воздействием активного спуфинга, то производят сброс текущего полетного задания, выдают команду на выполнение типового маневра «Стоп» для удержания позиции (зависания РБЛА) на месте, убедившись в достоверности результатов оценки состояния НП с требуемой доверительной вероятностью, отключают коррекцию БИНС от навигационных данных приемника СНС, выдают сообщение-сигнализацию «БИНС автономна», включают коррекцию вертикального канала БИНС от барометрического высотометра, о чем выдают сообщение-сигнализацию «Высотометр», запускают таймер автономной работы БИНС, выдают команду на выполнение маневра «Полет в точку с заданными координатами», с помощью датчика скорости определяют текущую воздушную скорость полета, затем рассчитывают расстояния и время полета до точек назначения и посадки в соответствии с полетным заданием, а также производят расчет прогнозируемого максимально допустимого времени автономного полета, за которое погрешность координаты БИНС достигнет предельно допустимой величины, если время до заданной точки назначения полетного задания меньше максимально допустимого времени автономного полета, то продолжают движение РБЛА в точку с заданными координатами, в противном случае полетное задание прерывают, выполняют полет в точку посадки, для этого выдают команду и формируют сообщение-сигнализацию «Полет в точку посадки», если время до точки посадки меньше максимально допустимого времени автономного полета, то продолжают полет в точку посадки и выполняют процедуру посадки, в указанную в полетном задании точку, иначе формируют сообщение-сигнализацию «Предельная ошибка координат», выдают команду «Вынужденная посадка» и осуществляют данную процедуру, если командный радиоканал управления РБЛА в наличии, то передают его текущие координаты и сообщение-сигнализацию «Возьми ручное управление», в случае восстановления нормального состояния НП выдают команду на выполнение типового маневра «Стоп» для удержания позиции (зависания РБЛА) на месте, убедившись в достоверности результатов оценки состояния НП с требуемой доверительной вероятностью, включают коррекцию БИНС от навигационных данных приемника СНС, выдают сообщение-сигнализацию «БИНС норма», отключают коррекцию вертикального канала БИНС от барометрического высотометра, сбрасывают таймер автономной работы БИНС, выдают команду на выполнение маневра «Полет в точку с заданными координатами».
В предлагаемом способе для оценки состояния НП в точке старта РБЛА в накопителе вычислителя формируют из вектора состояния потребителя СНС обучающую выборку в виде массива достоверных оценок местоопределения, одновременно извлекают из приемника СНС текущие дополнительные параметры: ошибку времени; геометрический фактор снижения точности по местоположению; отношения сигнал/помеха в измерительных каналах приемника СНС, по которым производится расчет навигационных параметров, затем осуществляют статистическую оценку текущего состояния НП, для этого с помощью обучающей выборки данных подсчитывают априорную вероятность и рассчитывают выборочное среднее и выборочную среднеквадратичную погрешность местоопределения, которые используют для вычисления функции правдоподобия, с помощью которой определяют доверительную вероятность текущего состояния НП, при соблюдении условия, что доверительная вероятность больше или равна установленной величины, формируют сообщение-сигнализацию «Достоверность», в процессе движения РБЛА на основании данных из массива достоверных измерений рассчитывают коэффициенты аппроксимирующего полинома, с помощью которого производят экстраполяцию координаты местоопределения для следующего временного отсчета, получают погрешность местоопределения путем сравнения текущего измерения координаты с экстраполированным значением, сравнивают погрешность местоопределения с вычисленным допустимым пороговым значением для нормального состояния НП, если это пороговое значение превышено, то принимают решение о наличии факта искажения, фиксируют этот момент времени и формируют сообщение-сигнализацию «Искажение сигнала СНС», при отсутствии искажения или помехового воздействия повторяют операции по новому массиву достоверных измерений, в случае наличия факта искажения НП сравнивают текущие отношения сигнал/помеха в измерительных каналах приемника СНС с нормативной величиной, соответствующей нормальному состоянию НП, проверяют решающее правило для идентификации активного спуфинга, выполняют решающее правило для идентификации других видов помехового воздействия, для чего сравнивают погрешность местоопределения с пороговыми значениями для типовых состояний искаженного НП, по результатам проверки принимают решение по установленному критерию о виде помехового воздействия, и формируют сообщение-сигнализацию с указанием вида помехи, по окончанию процедуры идентификации повторяют все операции по новому массиву достоверных измерений; для подтверждения достоверности результатов измерений при переходе НП из нормального состояния в искаженное или подавленное состояние и наоборот выполняют процедуру переобучения в режиме удержания позиции (зависания РБЛА) на месте, до тех пор, пока сформируется обучающая выборка, позволяющая определить, что НП находится в новом состоянии с требуемой доверительной вероятностью.
В заявляемом способе в процессе движения РБЛА в автономном режиме по заданному маршруту постоянно контролируют состояние заряда аккумуляторной батареи, для этого из контроллера СБП периодически считывают текущее значение напряжения аккумуляторной батареи и рассчитывают расстояние, которое может пролететь РБЛА на оставшемся заряде батареи, при достижении заряда критических значений вырабатывают решение на аварийную посадку, после чего производят сброс текущего полетного задания, выдают команду «Аварийная посадка» и осуществляют данную процедуру, если КРДУ в наличии, то передают его текущие координаты и сообщение-сигнализацию «Аварийная посадка».
В заявляемом способе в процессе движения РБЛА в автономном режиме по заданному маршруту с помощью датчика скорости определяют воздушную скорость полета, а с помощью ИНС путевую скорость, по значениям этих скоростей вычисляют скорость ветра, при достижении критических значений которой вырабатывают решение на аварийную посадку, после чего производят сброс текущего полетного задания, выдают команду «Аварийная посадка» и осуществляют данную процедуру, если КРДУ в наличии, то передают его текущие координаты и сообщение-сигнализацию «Аварийная посадка».
Достижение технического результата обеспечивается путем применения новых действий (операций) по обработке навигационных параметров и параметров, характеризующих состояние РБЛА и окружающей среды, которые в определенных последовательностях алгоритмически объединены в две операционные процедуры, а именно:
- в процедуру оценки стояния НП и идентификации видов помехового воздействия на приемник СНС;
- в процедуру управления логикой поведения РБЛА при его движении в автономном режиме.
Эти операционные процедуры логически взаимно увязаны между собой, поэтому исключение одной из них из введенной совокупности новых существенных признаков приведет к невозможности достижения задачи и технического результата изобретения.
Таким образом, введение совокупности новых существенных признаков является неочевидным изобретательским решением, имеющим технический характер.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной области техники, а также в смежных областях, с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Раскрытие изобретения
Сущность изобретения и отличительные (от прототипа) признаки
Способ автоматического управления движением РБЛА в автономном режиме заключается в том, что в РБЛА, который оборудован САУП, содержащей БИНС, реализованную на акселерометрах, гироскопах, магнитометрах и цифровом процессоре движения (ЦПД), приемника СНС, блок датчиков высоты и скорости, контроллер системы бортового питания (СБП), вычислитель, автопилот и исполнительные устройства, комплексирование БИНС и приемника СНС в интегрированную навигационную систему (ИНС) по слабо связанной схеме осуществляют с помощью вычислителя путем реализации Калмановской фильтрации, за счет которой на основании измерений полученных от приемника СНС формируют оценку вектора состояния потребителя и разность навигационных параметров от БИНС и приемника СНС, которые используют для компенсации ошибок БИНС, сформированное в вычислителе навигационное решение передают в автопилот, с помощью которого через исполнительные устройства осуществляют управление ориентацией и движением РБЛА, реализуя программный полет по заданным точкам, при движении по маршруту определяют динамические координаты по сигналам СНС и передают их в вычислитель, в котором осуществляется сравнение полученных динамических координат с координатами плана движения и моделью маршрута, записанного в памяти вычислителя, в случае несовпадения координат передают команды автопилоту для корректировки параметров движения и маршрута на всем цикле движения до остановки (посадки) РБЛА, вырабатываемые вычислителем команды управления РБЛА включают навигационные данные о поворотных пунктах маршрута с указанием их географических координат, заданных ортодромических путевых углов, ограничений на углы пространственной ориентации при выполнении разворота, заданные значения высоты полета, путевой скорости, а также отсчет момента измерения указанных данных по шкале единого времени, причем данные об изменении конкретного параметра согласуются с возможными перегрузками и предельными режимами полета РБЛА и реализуются рядом последовательных изменений этого параметра, отличающийся тем, что в процессе движения РБЛА в автономном режиме по заданному маршруту постоянно оценивают состояние НП и при необходимости идентифицируют виды помехового воздействия, когда НП находится в нормальном или допустимо искаженном состоянии, то продолжают выполнять коррекцию БИНС от навигационных данных приемника СНС, производят расчет расстояния и времени полета до навигационной точки назначения, выдают команду на выполнение маневра «Полет в точку с заданными координатами», в случае, когда НП оказывается в состоянии энергетического подавления или изменяется под воздействием активного спуфинга, то производят сброс текущего полетного задания, выдают команду на выполнение типового маневра «Стоп» для удержания позиции (зависания РБЛА) на месте, убедившись в достоверности результатов оценки состояния НП с требуемой доверительной вероятностью, отключают коррекцию БИНС от навигационных данных приемника СНС, выдают сообщение-сигнализацию «БИНС автономна», включают коррекцию вертикального канала БИНС от барометрического высотометра, о чем выдают сообщение-сигнализацию «Высотометр», запускают таймер автономной работы БИНС, выдают команду на выполнение маневра «Полет в точку с заданными координатами», с помощью датчика скорости определяют текущую воздушную скорость полета, затем рассчитывают расстояния и время полета до точек назначения и посадки в соответствии с полетным заданием, а также производят расчет прогнозируемого максимально допустимого времени автономного полета, за которое погрешность координаты БИНС достигнет предельно допустимой величины, если время до заданной точки назначения полетного задания меньше максимально допустимого времени автономного полета, то продолжают движение РБЛА в точку с заданными координатами, в противном случае полетное задание прерывают, выполняют полет в точку посадки, для этого выдают команду и формируют сообщение-сигнализацию «Полет в точку посадки», если время до точки посадки меньше максимально допустимого времени автономного полета, то продолжают полет в точку посадки и выполняют процедуру посадки, в указанную в полетном задании точку, иначе формируют сообщение-сигнализацию «Предельная ошибка координат», выдают команду «Вынужденная посадка» и осуществляют данную процедуру, если командный радиоканал управления РБЛА в наличии, то передают его текущие координаты и сообщение-сигнализацию «Возьми ручное управление», в случае восстановления нормального состояния НП выдают команду на выполнение типового маневра «Стоп» для удержания позиции (зависания РБЛА) на месте, убедившись в достоверности результатов оценки состояния навигационного поля с требуемой доверительной вероятностью, включают коррекцию БИНС от навигационных данных приемника СНС, выдают сообщение-сигнализацию «БИНС норма», отключают коррекцию вертикального канала БИНС от барометрического высотометра, сбрасывают таймер автономной работы БИНС, выдают команду на выполнение маневра «Полет в точку с заданными координатами».
Способ автоматического управления движением РБЛА в автономном режиме, отличающийся тем, что для оценки состояния НП в точке старта РБЛА в накопителе вычислителя формируют из вектора состояния потребителя СНС обучающую выборку в виде массива достоверных оценок местоопределения, одновременно извлекают из приемника СНС текущие дополнительные параметры: ошибку времени; геометрический фактор снижения точности по местоположению; отношения сигнал/помеха в измерительных каналах приемника, по которым производится расчет навигационных параметров, затем осуществляют статистическую оценку текущего состояния НП, для этого с помощью обучающей выборки данных подсчитывают априорную вероятность и рассчитывают выборочное среднее и выборочную среднеквадратичную погрешность местоопределения, которые используют для вычисления функции правдоподобия, с помощью которой определяют доверительную вероятность текущего состояния НП, при соблюдении условия, что доверительная вероятность больше или равна установленной величины, формируют сообщение-сигнализацию «Достоверность», в процессе движения РБЛА на основании данных из массива достоверных измерений рассчитывают коэффициенты аппроксимирующего полинома, с помощью которого производят экстраполяцию координаты местоопределения для следующего временного отсчета, получают погрешность местоопределения путем сравнения текущего измерения координаты с экстраполированным значением, сравнивают погрешность местоопределения с вычисленным допустимым пороговым значением для нормального состояния НП, если это пороговое значение превышено, то принимают решение о наличии факта искажения, фиксируют этот момент времени и формируют сообщение-сигнализацию «Искажение сигнала СНС», при отсутствии искажения или помехового воздействия повторяют операции по новому массиву достоверных измерений, в случае наличия факта искажения НП сравнивают текущие отношения сигнал/помеха в измерительных каналах приемника СНС с нормативной величиной, соответствующей нормальному состоянию НП, проверяют решающее правило для идентификации активного спуфинга, выполняют решающее правило для идентификации других видов помехового воздействия, для чего сравнивают погрешность местоопределения с пороговыми значениями для типовых состояний искаженного НП, по результатам проверки принимают решение по установленному критерию о виде помехового воздействия, и формируют сообщение-сигнализацию с указанием вида помехи, по окончанию процедуры идентификации повторяют все операции по новому массиву достоверных измерений; для подтверждения достоверности результатов измерения при переходе НП из нормального состояния в искаженное или подавленное состояние и наоборот выполняют процедуру переобучения в режиме удержания позиции (зависания РБЛА) на месте, до тех пор, пока сформируется обучающая выборка, позволяющая определить, что навигационное поле находится в новом состоянии с требуемой доверительной вероятностью.
Способ автоматического управления движением РБЛА в автономном режиме, отличающийся тем, что в процессе движения РБЛА в автономном режиме по заданному маршруту постоянно контролируют состояние заряда аккумуляторной батареи, для этого из контроллера СБП периодически считывают текущее значение напряжения аккумуляторной батареи и рассчитывают расстояние, которое может пролететь РБЛА на оставшемся заряде батареи, при достижении заряда критических значений вырабатывают решение на аварийную посадку, после чего производят сброс текущего полетного задания, выдают команду «Аварийная посадка» и осуществляют данную процедуру, если КРДУ в наличии, то передают его текущие координаты и сообщение-сигнализацию «Аварийная посадка».
Способ автоматического управления движением РБЛА в автономном режиме, отличающийся тем, что в процессе движения РБЛА в автономном режиме по заданному маршруту с помощью датчика скорости определяют воздушную скорость полета, а с помощью ИНС путевую скорость, по значениям этих скоростей вычисляют скорость ветра, при достижении которой критических значений вырабатывают решение на аварийную посадку, после чего производят сброс текущего полетного задания, выдают команду «Аварийная посадка» и осуществляют данную процедуру, если КРДУ в наличии, то передают его текущие координаты и сообщение-сигнализацию «Аварийная посадка».
Сравнительный анализ заявляемого изобретения с ближайшим аналогом (прототипом) показывает, что в предлагаемом изобретении существенными отличительными признаками являются наличие новых действий (операций) по обработке навигационных параметров и параметров, характеризующих состояния РБЛА и окружающей среды, а также новые логические связи между новыми (введенными) действиями (операциями) и известными действиями, относящимися к ограничительным признакам.
Данные существенные отличительные признаки приводят к появлению новых свойств у заявляемого изобретения, а именно: возможности выполнения полетного задания в автономном режиме полета при отсутствии радиоканала дистанционного управления и искаженном или подавленном навигационном поле, а также в обеспечении безопасности полетов РБЛА в такой сложной сигнально-помеховой обстановке.
Краткое описание чертежей
Предлагаемое изобретение поясняется чертежами, изображенными на фигурах 1-4.
На фиг. 1 представлена структурная схема типовой бортовой САУП, в которой реализуется заявленный способ. Данная бортовая САУП для автономного режима движения РБЛА состоит из следующих основных блоков:
1 - приемник спутниковых навигационных систем (СНС);
2 - бесплатформенная инерциальная навигационная система (БИНС);
3 - 3-х осевой акселерометр;
4 - 3-х осевой гироскоп;
5 - 3-х осевой магнитометр;
6 - цифровой процессор движения (ЦПД);
7 - блок датчиков высоты (барометрический высотомер) и скорости (датчик воздушного давления);
8 - контроллер системы бортового питания (СБП);
9 - вычислитель;
10 - автопилот;
11 - исполнительные устройства (контролеры двигателей РБЛА, сервоприводы рулей и поверхностей управления РБЛА).
Следует учесть, что принципы построения и работы данных блоков хорошо известны, поэтому при описании предлагаемого изобретения не раскрываются, а только рассматривается их взаимодействие с точки зрения реализации заявляемого способа.
На фиг. 2 поясняется возможность использовать погрешность местоопределения РБЛА для оценки состояния НП. На ней также демонстрируется процесс преобразования априорной плотности (штрихпунктирная линия) в апостериорную плотность (штриховая линия) с помощью функции правдоподобия (сплошная линия).
На фиг. 3 (а, б, в, г) представлены примеры распределения погрешностей местоопределения РБЛА при различных условиях состояния НП. Данные примеры получены в результате практических испытаний приемника СНС (NEOM8N фирмы U-BLOX) с периодом обновления данных в 0,1 секунду, поэтому при искаженном или подавленном НП распределения погрешностей имеют дискретный вид в виде точек различного вида. При этом представлены следующие примеры:
- на фиг. 3, а) - для нормального состояния НП;
- на фиг. 3, б) - для НП, находящегося в состоянии незначительного искажения, вызванного ионосферными возмущениями;
- на фиг. 3, в) - для НП, характеризующегося постепенным усилением степени искажения вследствие приближения РБЛА к источнику преднамеренной помехи;
- на фиг. 3, г) - для НП, подвергшегося полному энергетическому подавлению с последующим его восстановлением после выхода из зоны помехового воздействия.
На фиг. 4 (а, б, в, г, д) представлена блок-схема процедуры управления логикой поведения РБЛА при его движении в автономном режиме. Блок-схема содержит следующие типовые блоки:
- блок данных, обозначенный числом 102;
- блоки решений, например, обозначенные числами 103, 105;
- блоки процессов, например, обозначенные числами 111, 112;
- блоки типовых процессов (подпрограмм), например, обозначенные числами 119, 120;
- блоки отображений (сигнализаций), например, обозначенные числами 104, 106.
Описание реализации способа
Заявляемый способ реализуется с помощью типовой (широко используемой для малогабаритных РБЛА) САУП, структурная схема которой представлена на фиг. 1.
Ядром навигационной подсистемы САУП является малогабаритная БИНС (блок 2), состоящая из 3-х осевого акселерометра (блок 3), 3-х осевого гироскопа (блок 4), 3-х осевого магнитометра (блок 5). Для устранения системных погрешностей в датчиках БИНС, выполненных по технологии микроэлектромеханических систем (МЭМС), применяют Калмановскую фильтрацию, выполняемую непосредственно в ЦПД, встроенном в БИНС. ЦПД (блок 6) обеспечивает отправку в цифровом формате полного набора навигационных данных о позиционировании РБЛА и его угловой ориентации в пространстве в виде кватернионов или углов Эйлера. Таким образом, БИНС обеспечивает САУП навигационными параметрами (координаты и высота РБЛА, составляющие вектора скорости), а также параметрами ориентации РБЛА в реальном масштабе времени.
С помощью приемника СНС (блок 1) определяют текущие координаты местоопределения РБЛА и проекции скорости его движения, при этом выдачу навигационных параметров производят в реальном масштабе времени с частотой обновления 1 - 10 Гц. Навигационная особенность приемника СНС, в отличие от БИНС, состоит в том, что его координаты местоопределения отличаются достаточно высокой точностью, при этом их погрешность не обладает свойством накапливаться со временем, но только при условии отсутствия искажения и помех для принимаемого навигационного поля.
Благодаря различной физической природе и различным принципам формирования навигационного алгоритмического обеспечения приемник СНС и БИНС хорошо дополняют друг друга. Для повышения точности определения навигационных параметров в известных способах осуществляют комплексирование БИНС (блок 2) и приемника СНС (блок 1) в интегрированную навигационную систему (ИНС) по слабо связанной схеме. Такая схема ИНС обеспечивает возможность компенсации инструментальных ошибок измерительных элементов - гироскопов и акселерометров - по априорным данным из приемника СНС.
Функциональное (алгоритмическое) комплексирование выполняют в вычислителе САУП (блок 9) за счет подпрограммы интегральной Калмановской фильтрации. С помощью процедуры Калмановской фильтрации в вычислителе (блок 9) на основании измерений полученных от приемника СНС формируют оценку вектора состояния потребителя и определяют разность между навигационными параметрами от БИНС и приемника СНС, которую используют для компенсации ошибок БИНС.
Устранение ошибок дрейфа БИНС осуществляют с частотой цикла выработки навигационного решения в вычислителе (блок 9) при условии приемлемого качества радионавигационных измерений и слежения не менее, чем за четырьмя навигационными искусственными спутниками земли (ИСЗ).
Дополнительными навигационными данными, повышающими точность навигационного решения, в том числе в условиях подавления НП, выступают данные, поступающие из блока датчиков 7 от барометрического высотомера (датчика высоты) и 3-х осевого магнитометра (блок 5). Эти данные позволяют уточнить высоту и курс полета РБЛА.
В качестве сенсора для определения высоты используют цифровой МЭМС датчик давления, для которого зависимость высоты от атмосферного давления определяется известной формулой:
 , (1)
, (1)
где P - давление на высоте H, P0 - давление над уровнем моря (101325 Па).
Внешний магнитометр (блок 5) используют для компенсации ухода угла рысканья, измеряемого Z осью гироскопа.
В результате полученное в вычислителе (блок 9) скорректированное (уточненное) навигационное решение, содержащее данные о текущих координатах и углах ориентации РБЛА, передают в автопилот (блок 10).
Автопилот (блок 10) осуществляет выработку управляющих команд в виде ШИМ (широтно-импульсно модулированных) сигналов, сообразно правилам управления, заложенных в его память. При этом в память автопилота заносят все необходимые поворотные пункты (точки) маршрута. Каждая точка характеризуется координатами, высотой прохождения и скоростью полета.
Для реализации заявляемого способа с помощью автопилота САУП через исполнительные устройства (блоки 11) обеспечивают автономный полет РБЛА по заданному маршруту; его автоматический взлет и заход на посадку; поддержание заданной высоты и скорости полета РБЛА; стабилизацию углов его ориентации; удержание позиции (зависание РБЛА) на месте.
В качестве исполнительных устройств (блоки 11) САУП используют контролеры двигателей в мультироторных РБЛА, а в РБЛА самолетного типа помимо контролера двигателя, используют сервоприводы управляющих поверхностей (руля высоты, руля направления, элеронов, закрылок).
Для реализации представленного способа в динамике полета РБЛА с помощью САУП выполняются следующие действия (операции):
- при движении по заданному маршруту определяют динамические координаты по сигналам СНС и передают их в вычислитель, в котором осуществляется сравнение полученных динамических координат с координатами плана движения и моделью маршрута, записанного в памяти вычислителя,
- в случае несовпадения координат передают команды автопилоту для корректировки параметров движения и маршрута на всем цикле движения до остановки (посадки) РБЛА.
При этом вырабатываемые вычислителем команды управления РБЛА включают навигационные данные о поворотных пунктах маршрута с указанием их географических координат, заданных ортодромических путевых углов, ограничений на углы пространственной ориентации при выполнении разворота, заданные значения высоты полета, путевой скорости, а также отсчет момента измерения указанных данных по шкале единого времени. Причем данные об изменении конкретного параметра согласуются с возможными перегрузками и предельными режимами полета РБЛА и реализуются рядом последовательных изменений этого параметра.
Все перечисленные до этого действия (операции), выполняемые в описываемом способе, относятся к ограничительным признакам, т.е. они являются общими как для заявляемого способа, так и для наиболее близкого аналога (прототипа). Эти действия обеспечивают автоматическое управление движение РБЛА в автономном режиме, но только при условии, что НП находится в нормальном (неискаженном) состоянии.
Далее представлено описание реализации способа применительно к новым действиям (операциям), относящимся к отличительным признакам, обеспечивающим осуществление задачи и технического результата изобретения.
Важное место в заявляемом способе занимает процедура, осуществляющая оценку стояния НП и идентификацию видов помехового воздействия на приемник СНС. Рассмотрим методику, на основе которой реализована данная процедура.
Методика оценки стояния навигационного поля и идентификации видов помехового воздействия на приемник СНС
В основу методики положен подход, при котором на основании байесовского критерия минимального среднего риска происходит сравнение текущих результатов навигационных измерений с расчетными значениями, полученными экстраполированием некоторого участка, где измерения можно считать достоверными.
Данный подход предусматривает полиномиальную аппроксимацию некоторого массива из N достоверных измерений R = (R1, R2, …, Rj, …, RN), которыми являются оценки местоопределения РБЛА, на интервале времени  с шагом τ, равным периоду поступления навигационных параметров от приемника СНС. Аппроксимацию осуществляют полиномом m-й степени. Практические исследования показывают, что для аппроксимации траектории движения малогабаритного РБЛА достаточно полинома 5 или 6-й степени.
с шагом τ, равным периоду поступления навигационных параметров от приемника СНС. Аппроксимацию осуществляют полиномом m-й степени. Практические исследования показывают, что для аппроксимации траектории движения малогабаритного РБЛА достаточно полинома 5 или 6-й степени.
В общем виде аппроксимирующая функция, совпадающая в N+1 точках с распределением достоверных измерений координат местоопределения, описывается выражением:
 , (2)
, (2)
где  - коэффициенты полинома, определяемые решением уравнения
- коэффициенты полинома, определяемые решением уравнения
 , (3)
, (3)
где: V - матрица Вандермонда размером N×(m+1), элементы которой задаются следующим образом:  (
(  ;
;  ).
).
Для расчета следующей координаты местоопределения производят процедуру экстраполяции. Подставляя в аппроксимирующий полином значения полученных коэффициентов и значение времени  , получаем значение экстраполируемой функции для следующего отсчета координат на заданном временном интервале, т.е.
, получаем значение экстраполируемой функции для следующего отсчета координат на заданном временном интервале, т.е.
 . (4)
. (4)
Если измерения R в матрице-столбце R некоррелированы и имеют дисперсию, описываемую вектором  , то корреляционная матрица ошибок коэффициентов полинома равна
, то корреляционная матрица ошибок коэффициентов полинома равна
 . (5)
. (5)
В результате задача обнаружения факта искажения или подавления НП сводится к различению гипотез, т.е. к принятию решения: является ли отклонение оцениваемой координаты местоопределения от расчетной координаты результатом искажения НП или имеет место допустимая погрешность, характерная для текущего состояния НП.
При нормальном состоянии НП отношения сигнал/помеха ( ) на входе измерительных каналов приемника СНС примерно равны 45 дБм/Гц, т.е. нормативной величине, предусмотренной интерфейсным контрольным документом ГНСС. В этом случае средние значения оценок местоопределения приблизительно совпадают с их истинными значениями, а незначительные погрешности попадают в заданный доверительный интервал.
) на входе измерительных каналов приемника СНС примерно равны 45 дБм/Гц, т.е. нормативной величине, предусмотренной интерфейсным контрольным документом ГНСС. В этом случае средние значения оценок местоопределения приблизительно совпадают с их истинными значениями, а незначительные погрешности попадают в заданный доверительный интервал.
Наиболее сложно обнаружить факт искажения НП, когда отношение сигнал/помеха на входе измерительных каналов приемника СНС уменьшается незначительно на 10…15 дБм/Гц. В этом случае точностные характеристики местоопределения будут искажены незначительно, что не позволяет их легко обнаружить, поскольку средние значения оценок местоопределения оказываются достаточно близкими к истинным. Это накладывает достаточно высокие требования на чувствительность и достоверность алгоритмов обнаружения помехового воздействия.
Для устранения данного недостатка в предлагаемом способе используется байесовский вероятностный подход к решению задачи обнаружения факта искажения НП и идентификации помехового воздействия. Применение этого подхода основано на вычислении условной вероятности появления такого события, как текущее состояние Dk НП при условии, что в результате измерений получен конкретный набор значений признаков R. В качестве идентификационных признаков выступают оценки местоопределения R=(R1, R2, …, Rj, …, RN).
Для вероятностной оценки состояния НП применяют формулу Байеса:
 . (6)
. (6)
где:  - апостериорная плотность распределения нахождения НП в состоянии
- апостериорная плотность распределения нахождения НП в состоянии  при получении комплекса признаков
при получении комплекса признаков  т.е. это та величина, которую ищут для решения задачи распознавания классов состояний НП;
т.е. это та величина, которую ищут для решения задачи распознавания классов состояний НП;
 - априорная плотность распределения случайной величины
- априорная плотность распределения случайной величины  при условии, что НП находится в состоянии
при условии, что НП находится в состоянии  . Она имеет смысл функции правдоподобия и определяется путем статистической обработки выборки из N оцениваемых координат местоопределений, погрешности которых распределены по нормальному закону. Для определения функции правдоподобия в заданном доверительном интервале, как правило, ±2-сигма для конкретной реализации комплекса признаков
. Она имеет смысл функции правдоподобия и определяется путем статистической обработки выборки из N оцениваемых координат местоопределений, погрешности которых распределены по нормальному закону. Для определения функции правдоподобия в заданном доверительном интервале, как правило, ±2-сигма для конкретной реализации комплекса признаков  рассчитывают их выборочное среднее
рассчитывают их выборочное среднее  и выборочную среднеквадратическую погрешность (СКП)
и выборочную среднеквадратическую погрешность (СКП)  ;
;
 - априорная плотность распределения конкретного состояния
- априорная плотность распределения конкретного состояния  НП, ее определяют путем статистической обработки выборки из N оцениваемых координат местоопределения, как частоту такого события
НП, ее определяют путем статистической обработки выборки из N оцениваемых координат местоопределения, как частоту такого события  , при котором оцениваемое местоопределение входит в установленный доверительный интервал, соответствующий состоянию НП
, при котором оцениваемое местоопределение входит в установленный доверительный интервал, соответствующий состоянию НП , т.е.
, т.е.  ;
;
 - априорная вероятность появления конкретной реализации R комплекса признаков для всех возможных состояний НП, носит смысл масштабирующего множителя, который для генеральной выборки равен 1.
- априорная вероятность появления конкретной реализации R комплекса признаков для всех возможных состояний НП, носит смысл масштабирующего множителя, который для генеральной выборки равен 1.
С помощью рассчитанной статистическим образом функции правдоподобия оценивают, насколько правдоподобно получены значения конкретной реализации признаков  , содержащиеся в выборке из N элементов, при известном априорном состоянии НП
, содержащиеся в выборке из N элементов, при известном априорном состоянии НП  .
.
С целью обеспечения нормальности распределения, объем выборки устанавливают равным N≥30. Время формирования такой выборки при поступлении навигационных параметров с периодом 0,1…0,5 сек, составляет от 3 до 15 сек. Это достаточно большое время, поэтому такой объем приемлем для РБЛА вертолетного или мультироторного типа, имеющих возможность удерживать позицию (зависать) в одной точке. Для РБЛА самолетного типа объем выборки уменьшают до N≤20, используя при этом поправочные коэффициенты Стьюдента для определения доверительного интервала.
Применение байесовского подхода позволяет после статистической обработки признаков получить апостериорную плотность распределения возможных значений вероятностей нахождения НП в одном из классов его состояний. За счет применения формулы Байеса, априорная плотность распределения, установленная до анализа данных из принятой выборки признаков, превращается в апостериорную. Это позволяет оценить достоверность попадания состояния НП в зону, относящуюся к какому-либо определенному классу. При этом следует учитывать, что формулу (6) применяют итерационно после поступления каждой новой порции данных. Тогда текущее распределение считают априорным, а с поступлением новых данных получают апостериорное распределение, становящееся априорным для следующей итерации. Для применения байесовского подхода требуется дополнительное время, которое расходуется на машинное обучение вычислителя САУП статистически оценивать текущее состояния НП по полученным признакам в виде эмпирического распределения оценок координат местоопределения РБЛА.
Для получения непосредственно доверительной апостериорной вероятности  используют метод максимизации апостериорной плотности (МАП), что позволяет найти точку, в которой она максимальна. Для этого, логарифмируют формулу Байеса
используют метод максимизации апостериорной плотности (МАП), что позволяет найти точку, в которой она максимальна. Для этого, логарифмируют формулу Байеса
 . (7)
. (7)
Тогда задача максимизации выражения (6) по параметру примет вид:
 . (8)
. (8)
Из выражения (8) очевидно, в результате максимизируют логарифмы правдоподобия и априорного распределения вероятности конкретного состояния НП. Второе слагаемое выступает в роли своеобразного регулятора машинного обучения, поскольку, чем больше вероятность  , тем при меньшем объеме выборки можно получить более точное значение доверительной вероятности, и наоборот.
, тем при меньшем объеме выборки можно получить более точное значение доверительной вероятности, и наоборот.
В заявляемом способе применяют метод МАП для решения задачи обнаружения факта искажения НП. При этом оценку погрешности текущего местоопределения РБЛА находят из уравнения
 , (9)
, (9)
где  - экстраполированное значение текущей координаты местоопределения.
- экстраполированное значение текущей координаты местоопределения.
Считая, что погрешности местоопределения распределены по нормальному закону, получают выражение

 . (10)
. (10)
Первое слагаемое в формуле (10) есть величина постоянная для текущего распределения, следовательно, максимизацию логарифма правдоподобия осуществляют за счет минимизации второго слагаемого. В результате задача максимизации логарифма правдоподобия обучающей выборки сводится к минимизации квадратичной погрешности, т.е.
 . (11)
. (11)
Таким образом, установлено, что чем больше погрешность местоопределения, тем больше функция правдоподобия, указанная на фиг. 2 сплошной линией, уводит максимум апостериорной плотности, изображенной штриховой линией, от максимума априорной плотности (штрихпунктирная линия). Это означает, что величины погрешностей местоопределения РБЛА следует использовать для оценки состояния НП, поскольку они имеют свойство существенно возрастать под действием помех. В результате между максимумами априорных и апостериорных плотностей вероятностей появляется существенное различие, позволяющее ввести пороговое значение, по которому можно устанавливать принадлежность состояния НП к одному из классов.
Для принятия решения о наличии факта искажения НП и идентификации видов помехового воздействия определяют пороговые значения. С учетом нормальности распределения оценок местоопределения, опираясь на метод МАП, устанавливают предельную СКП для доверительного интервал ±2-сигма, как удвоенное минимально возможное отклонение для текущего состояния НП.
Предельную СКП, зависящую от отношения сигнал/шум  на входе измерительных каналов приемника СНС, вычисляют по формуле:
на входе измерительных каналов приемника СНС, вычисляют по формуле:
 , (12)
, (12)
где: Pdop - геометрический фактор снижения точности координаты по местоположению;  - эффективная (среднеквадратическая) ширина спектра навигационного сигнала;
- эффективная (среднеквадратическая) ширина спектра навигационного сигнала;  - ошибка времени; с- скорость света.
- ошибка времени; с- скорость света.
На основании имитационного моделирования различных видов помехового воздействия на приемник СНС (NEOM8N фирмы U-BLOX) и статистической обработки навигационных параметров установлены предельные значения СКП для нескольких типовых классов состояния НП:
-  , [метр] - нормальное (неискаженное) состояние навигационного поля при
, [метр] - нормальное (неискаженное) состояние навигационного поля при  45 дБм/Гц;
45 дБм/Гц;
-  , [метр] - незначительно искаженное состояние навигационного поля при
, [метр] - незначительно искаженное состояние навигационного поля при  =40…33 дБм/Гц, вызванное интерференционными замираниями вследствие наличия отражений принимаемого сигнала от зданий и естественных препятствий местности;
=40…33 дБм/Гц, вызванное интерференционными замираниями вследствие наличия отражений принимаемого сигнала от зданий и естественных препятствий местности;
-  , [метр] - искаженное состояние НП при = 33…28 дБм/Гц, вызванное ионосферными и (или) тропосферными возмущениями;
, [метр] - искаженное состояние НП при = 33…28 дБм/Гц, вызванное ионосферными и (или) тропосферными возмущениями;
-  , [метр] - нарастающая преднамеренная помеха при = 28…20 дБм/Гц;
, [метр] - нарастающая преднамеренная помеха при = 28…20 дБм/Гц;
-  , [метр] - скачкообразное энергетическое подавление при = 20…10 дБм/Гц.
, [метр] - скачкообразное энергетическое подавление при = 20…10 дБм/Гц.
Для построения решающего правила по критерию минимизации СКП, используют следующее неравенство
 . (13)
. (13)
Тогда, согласно этому критерию, для обнаружения факта искажения навигационного поля проверяют неравенство (14), а для идентификации видов помехового воздействия - неравенство (15), т.е.
 , (14)
, (14)
 , где
, где  . (15)
. (15)
Таким образом, если погрешность местоопределения превосходит минимальное пороговое значение  , то имеет факт искажения НП. Дальнейшим сравнением погрешности местоопределения с другими пороговыми значениями
, то имеет факт искажения НП. Дальнейшим сравнением погрешности местоопределения с другими пороговыми значениями  (
( ) идентифицируют вид помехового воздействия по принадлежности состояния НП к тому или иному классу.
) идентифицируют вид помехового воздействия по принадлежности состояния НП к тому или иному классу.
Идентификацию активного спуфинга осуществляют в процессе полета РБЛА путем зависания РБЛА (удержания позиции) в одной точке пространства. Если в процессе контроля установлено, что  45 дБм/Гц имеют факт нормального состояния НП, но при этом не выполняется неравенство (14), а выполняется одно из неравенств (15), такую ситуацию следует идентифицировать как активное навязывание неправильных координат местоопределения.
45 дБм/Гц имеют факт нормального состояния НП, но при этом не выполняется неравенство (14), а выполняется одно из неравенств (15), такую ситуацию следует идентифицировать как активное навязывание неправильных координат местоопределения.
Математически условие факта активного навязывания неправильных координат местоопределения записывают в виде:
 . (16)
. (16)
Таким образом, на основе представленной совокупности действий и математических операций (выражения 2-16), выполняемых в определенной последовательности, в заявляемом способе реализуют процедуру по оценке состояния НП и идентификацию видов помехового воздействия на приемник СНС с использованием введенных типовых классов.
Для реализации процедуры управления логикой поведения РБЛА при движении в автономном режиме введены следующие типовые классы:
- нормальное (неискаженное) состояние ( );
);
- незначительно искаженное состояние ( ), приводящее к небольшому изменению оценок местоопределения, при этом возможна их оценка с допустимой погрешностью;
), приводящее к небольшому изменению оценок местоопределения, при этом возможна их оценка с допустимой погрешностью;
- энергетическое подавление ( ), при котором отношение сигнал/помеха по всем каналам приемника СНС резко уменьшается до величины, меньшей порога чувствительности - 13…15 дБм/Гц, что приводит к скачкообразному и быстрому изменению координат местоопределения;
), при котором отношение сигнал/помеха по всем каналам приемника СНС резко уменьшается до величины, меньшей порога чувствительности - 13…15 дБм/Гц, что приводит к скачкообразному и быстрому изменению координат местоопределения;
- активный спуфинг ( ), проявляющийся в подмене координат местоопределения для плавного увода РБЛА с заданного маршрута движения или его принудительной посадки, при этом отношения сигнал/помеха по измерительным каналам приемника СНС примерено соответствуют нормативной величине 45 дБм/Гц или даже превышают ее.
), проявляющийся в подмене координат местоопределения для плавного увода РБЛА с заданного маршрута движения или его принудительной посадки, при этом отношения сигнал/помеха по измерительным каналам приемника СНС примерено соответствуют нормативной величине 45 дБм/Гц или даже превышают ее.
Процедура управления логикой поведения РБЛА при движении в автономном режиме
Другой отличительной новизной заявляемого способа является процедура управления логикой поведения РБЛА при его движении в автономном режиме в условиях искаженного или подавленного НП и отсутствия КРДУ. С помощью данной процедуры программно реализуется новый логический контур САУП. Этот контур совместно с традиционными контурами, осуществляющими управление ориентацией и навигацией РБЛА, позволяет реализовать управление его движением в автономном режиме полета.
При разработке процедуры управления логикой поведения РБЛА учтены следующие факторы, влияющие на выполнение полетного задания:
- во время движения РБЛА может попадать в зоны с различной степенью искаженности НП;
- по мере приближения к источнику помех может произойти полное подавление НП;
- в нормальных условиях работы РБЛА коррекция БИНС выполняется с использованием сигналов СНС;
- при попадании РБЛА в условия искажающие параметры навигационного поля или блокирующие прием, коррекция БИНС по сигналам СНС становится затруднительной или не возможной;
- работа БИНС в автономном режиме характеризуется значительными погрешностями определения координат местоопределения и угловых скоростей, накапливаемыми со временем;
- в условиях автономной работы для обеспечения безопасности полета следует осуществлять коррекцию канала высоты и вертикальной скорости от барометрического высотомера, а также выполнять коррекцию направления на север при помощи магнитометра;
- автономный режим РБЛА с целью обеспечения безопасности полета ограничивается временем, при котором погрешность координат местоопределения достигает предельно допустимой величины;
- для обеспечения безопасности полета малогабаритного РБЛА в автономном режиме необходимо контролировать состояние заряда аккумуляторной батареи и скорость ветра;
- в процессе выполнения полетного задания в автономном режиме необходимо регистрировать информацию о состоянии САУП и РБЛА, подразделяя ее по степени важности на уведомляющую, предупреждающую и аварийную.
Процедуру управления логикой поведения РБЛА осуществляют на основе следующих входных данных, характеризующих текущее состояние РБЛА и окружающей среды:
1) Переменная состояния НП  , определяемая по навигационным параметрам приемника СНС с помощью процедуры по оценке состояния НП и идентификация видов помехового воздействия. Данная переменная принимает следующие значения:
, определяемая по навигационным параметрам приемника СНС с помощью процедуры по оценке состояния НП и идентификация видов помехового воздействия. Данная переменная принимает следующие значения:
- при нормальном (неискаженном) состоянии НП;
- при незначительно искаженном состоянии НП, допустимом для продолжения полета РБЛА с допустимой погрешностью координат местоопределения;
- при энергетически подавленном НП, при котором невозможна навигация за счет СНС;
-  при активном спуфинге, при котором навигация за счет СНС приведет к невыполнению полетного задания и вполне возможно к потере РБЛА.
при активном спуфинге, при котором навигация за счет СНС приведет к невыполнению полетного задания и вполне возможно к потере РБЛА.
2) Переменная состояния КРДУ , с помощью которой осуществляется оценка работоспособности КРДУ. Она принимает два значения:
, с помощью которой осуществляется оценка работоспособности КРДУ. Она принимает два значения:
-  при невозможности использовать радиоканал для дистанционного управления РБЛА;
при невозможности использовать радиоканал для дистанционного управления РБЛА;
-  при нахождении радиоканала в рабочем состоянии, обеспечивающем возможность дистанционного управления РБЛА.
при нахождении радиоканала в рабочем состоянии, обеспечивающем возможность дистанционного управления РБЛА.
3) Переменная заряда батареи Bat_charge, поступает из контроллера СБП, с ее помощью производится оценка уровня заряда (напряжения) аккумуляторной батареи.
4) Переменная величины воздушной скорости Air_speed поступает из датчика скорости, которая определяется как величина скорости набегающего потока:
 , (17)
, (17)
где ΔP - разница полного и статического давлений, измеряемая датчиком скорости; ρ - плотность воздуха; ξ - коэффициент преобразования датчика.
5) Переменная величины путевой скорости Ground_speed определяется по показаниям инерциальной навигационной системы (ИНС) как скорость перемещения объекта относительно земной поверхности путем деления пройденного пути на единицу времени (1 секунду).
6) Постоянная величина максимально допустимой скорости ветра , при которой обеспечивается безопасность полета РБЛА.
, при которой обеспечивается безопасность полета РБЛА.
С помощью процедуры управления логикой поведения РБЛА, заложенной в САУП, реализуют логический автомат, обеспечивающий реакцию РБЛА на изменение состояний НП и КРДУ, при которых выполняется полетное задание.
С помощью разработанного логического автомата в процедуре управления логикой поведения РБЛА осуществляют:
- выработку по установленным критериям управляющих воздействий на полет и поведение РБЛА в виде команд для производства расчетов и обработки данных, а также для выполнения типовых маневров движения;
- формирование и регистрацию сообщений-сигнализаций о состоянии контролируемой системы управления.
Заложенное в процедуре логическое соответствие между поведением РБЛА в автономном режиме и состоянием НП представлено в таблице 1.
Таблица 1.
поля
полет по маршруту в автономном режиме
полет по маршруту или в точку посадки в автономном режиме
(SINS_corr_SNS = 0),
полет по маршруту или в точку посадки в автономном режиме
(SINS_corr_SNS = 0),
полет по маршруту или в точку посадки в автономном режиме
В процедуре управления логикой поведения РБЛА обеспечивают расчет параметров, необходимых для выработки управляющих воздействий. К этим параметрам относятся:
- расстояние и время полета до точек назначения (Dist_NP, Time_ NP), указанных в полетном задании;
- расстояние и время полета до точек посадки (Dist_LP, Time_LP), предусмотренных в полетном задании;
- максимально допустимое время автономного полета tмах.avt, за которое погрешность координат, определенных БИНС, достигнет предельно допустимой величины  ;
;
- расстояние Flight_range, которое может пролететь РБЛА на оставшемся заряде батареи;
- скорость ветра Wind_speed.
Расчет расстояний Dist_NP, Dist_LP, а также соответствующего им времени Time_ NP, Time_LP осуществляются любыми известными методами, применяемыми в САУП современных РБЛА.
Необходимость расчета время автономного полета tмах.avt вызвана тем, что малогабаритные БИНС, состоящие из гироскопов и акселерометров, выполненных по технологии МЭМС, обладают повышенной шумностью, приводящей к достаточной большой погрешности измеряемых линейных скоростей и координат местоопределения. Систематические составляющие погрешностей этих датчиков могут быть частично устранены в процессе калибровки, а затем скомпенсированы в процессе работы за счет процедуры Калмановской фильтрации. Следовательно, на точность решения задачи ориентации и навигации РБЛА в автономном режиме существенным образом влияют случайные погрешности, которые имеют тенденцию в течение времени возрастать. В результате погрешность координаты местоопределения РБЛА в течение 5 минут автономного полета может достичь величины 500 м и более.
Время автономного полета, при котором погрешность координат достигнет заданной , определяют из уравнения, составленного на основе формул для быстрой экспресс-оценки погрешностей, полученных в работе [2]:
 , (18)
, (18)
из которого следует, что максимальное время автономного полета равно
 , (19)
, (19)
где ARW- случайное блуждание угла гироскопа g - ускорение свободного падения,  - время корреляции,
- время корреляции,  - нестабильность нуля (фликкер-шум).
- нестабильность нуля (фликкер-шум).
Таким образом, если  , то автономный полет под управлением только БИНС возможен, при этом ошибки координат местоопределения РБЛА не будут превышать максимально допустимой погрешности . В противном случае автономный полет не возможен, поэтому целесообразно осуществить полет в точку посадки. В случае невозможности полета в точку посадки, РБЛА должен безопасно произвести вынужденную посадку.
, то автономный полет под управлением только БИНС возможен, при этом ошибки координат местоопределения РБЛА не будут превышать максимально допустимой погрешности . В противном случае автономный полет не возможен, поэтому целесообразно осуществить полет в точку посадки. В случае невозможности полета в точку посадки, РБЛА должен безопасно произвести вынужденную посадку.
Скорость ветра Wind_speed находится из навигационного треугольника скоростей с помощью выражения
 , (20)
, (20)
где Ground_speed и Drift_angle - соответственно путевая скорость и угол сноса, определяемые с помощью ИНС; Air_speed - воздушная скорость, определяемая с помощью датчика скорости; Wind_angle - угол ветра, определяемый из метеорологического ветра по данным метеосводок.
Таким образом, реализованная в САУП, процедура управления логикой поведения РБЛА обеспечивает автоматическое управление его движением в автономном режиме путем выполнения следующих типовых маневров:
1) Автоматический взлет и посадка.
2) Удержание заданного значения высоты (набор, снижение).
3) Удержание заданной позиции (зависание). Данный маневр по-другому называют «Стоп», при этом скорость полета устанавливают равной 0, он может быть выполнен на любом этапе полета.
4) Автоматический полет по точкам по заранее заданному и заложенному в память вычислителя и автопилота САУП маршруту. Частными случаями такого маневра являются «Полет в точку с заданными координатами» и «Полет в точку посадки».
5) Возврат на точку старта, когда РБЛА независимо от его текущего положения автоматически возвращается на точку взлета и переходит в режим удержания позиции. Частным случаем этого маневра является «Вынужденная посадка».
6) «Аварийная посадка», при которой устанавливают углы крена и тангажа равные нулю и выполняют снижение для посадки.
Данные типовые маневры движения реализованы практически во всех современных малогабаритных РБЛА.
Описание реализации способа с примерами конкретного выполнения
Для подтверждения практической реализуемости заявляемого способа представим его подробно в виде совокупности выполняемых в определенной последовательности действий (операций, приемов) с соблюдением определенных правил принятия решений.
Реализация процедуры по оценке состояния навигационного поля и идентификация видов помехового воздействия на приемник СНС
Вначале представим описание реализации процедуры по оценке состояния НП и идентификацию видов помехового воздействия. Обобщенно данная процедура представляет собой совокупность действий (операций, приемов), алгоритмически объединенных в четыре циклически выполняемых этапа:
1) Подготовки обрабатываемых навигационных параметров.
2) Статистической оценки текущего состояния НП.
3) Определения факта искажения НП.
4) Идентификации видов помехового воздействия.
На этапе подготовки обрабатываемых навигационных параметров для текущего временного отсчета выполняют следующие действия (операции, приемы):
- формируют из вектора состояния потребителя СНС обучающую выборку в виде массива из N достоверных оценок местоопределения РБЛА  ;
;
- извлекают из приемника СНС текущие дополнительные навигационные параметры: ошибку времени  ; геометрический фактор снижения точности по местоположению Pdop; отношение сигнал/помеха h в измерительных каналах приемника СНС, по которым производится расчет навигационных параметров.
; геометрический фактор снижения точности по местоположению Pdop; отношение сигнал/помеха h в измерительных каналах приемника СНС, по которым производится расчет навигационных параметров.
Этап статистической оценки текущего состояния НП включает в себя следующую последовательность действий (операций, приемов), осуществляемую данными обучающей выборки:
- рассчитывают статистические параметры распределения, а именно: выборочное среднее  , выборочную СКП
, выборочную СКП  для оценок местоопределения
для оценок местоопределения  ;
;
- подсчитывают априорную вероятность  , количественно определяемой частотой такого события , при котором оцениваемое местоопределение входит в установленный доверительный интервал, соответствующий состоянию НП, т.е. ;
, количественно определяемой частотой такого события , при котором оцениваемое местоопределение входит в установленный доверительный интервал, соответствующий состоянию НП, т.е. ;
- вычисляют функцию правдоподобия  для доверительного интервала ±2-сигма, используя при необходимости поправочный коэффициент Стьюдента, в случае если N< 30;
для доверительного интервала ±2-сигма, используя при необходимости поправочный коэффициент Стьюдента, в случае если N< 30;
- определяют доверительную вероятность  нахождения НП в текущем состоянии
нахождения НП в текущем состоянии  ;
;
- формируют сигнал «Достоверность» при условии, что доверительная вероятность больше или равна установленной величины.
Первые два этапа выполняют для машинного обучения вычислителя САУП оценивать текущее состояние НП по полученным признакам в виде эмпирического распределения оценок координат местоопределения РБЛА.
Первоначальное обучение проводят в исходном (стартовом) местоположении РБЛА после перехода приемника СНС в режим слежения при условии, что НП находится в допустимом нормальном состоянии Dн.
В результате процедуры первоначального обучения, производящейся в отсутствии помехового воздействия, с помощью вычислителя САУП устанавливают, что априорная вероятность P(Dн) нормального состояния НП асимптотически устремляется к 1, а распределение погрешностей местоопределения правдоподобно попадает в требуемый доверительный интервал ±2-сигма с вероятностью 0,95. Это означает, что НП с доверительной вероятностью 0,95 находится в нормальном состоянии по результатам проведенной статистической оценки погрешностей местоопределения РБЛА. При нормальном состоянии НП функция правдоподобия (на фиг. 2 показана сплошной линией) совпадает с апостериорной плотностью (на фиг. 2 показана штриховой линией), и ее максимум практически полностью сближается с максимумом априорной вероятности (на фиг. 2 показана штрихпунктирной линией).
Время начального обучения, при поступлении навигационных параметров с периодом 0,1…0,5 с, составляет соответственно от 3 до 15 секунд.
При получении вычислителем следующей текущей координаты местоопределения РБЛА данные апостериорные вероятности становятся априорными и используются для определения новой доверительной вероятности.
На третьем этапе для определения факта искажения НП в процессе движения РБЛА для текущего временного отсчета выполняют следующие действия (операции, приемы):
- рассчитывают коэффициенты аппроксимирующего полинома  на основании данных из массива достоверных измерений;
на основании данных из массива достоверных измерений;
- производят экстраполяцию измерений на следующий временной отсчет  с помощью полученных коэффициентов полинома m-й степени;
с помощью полученных коэффициентов полинома m-й степени;
- получают погрешность местоопределения  путем сравнения текущего измерения координаты
путем сравнения текущего измерения координаты  с экстраполированным значением
с экстраполированным значением  ;
;
- сравнивают погрешность местоопределения с вычисленным допустимым пороговым значением для нормального состояния НП;
- принимают решение, если это пороговое значение превышено, о наличии факта искажения, фиксируют этот момент времени и формируют сигнал «Искажение сигнала СНС»;
- при отсутствии искажения или помехового воздействия повторяют операции по новому массиву достоверных измерений.
Четвертый этап идентификации видов помехового воздействия выполняют в случае наличия факта искажения НП, при этом выполняют следующие действия (операции, приемы):
- вычисляют пороговые значения  для типовых состояний искаженного НП в соответствии с установленными классами;
для типовых состояний искаженного НП в соответствии с установленными классами;
- сравнивают текущие отношения сигнал/помеха в измерительных каналах приемника СНС с нормативной величиной 45 дБм/Гц, соответствующей нормальному состоянию НП;
- проверяют решающее правило для идентификации активного спуфинга;
- выполняют решающее правило для идентификации видов помехового воздействия, для чего сравнивают погрешность местоопределения  с пороговыми значениями для типовых состояний искаженного НП;
с пороговыми значениями для типовых состояний искаженного НП;
- по результатам проверок принимают решение по установленному критерию о виде помехового воздействия, и формируют сигнал с указанием вида помехи, например: - при нормальном (неискаженном) состоянии, - при незначительно искаженном состоянии, когда оценка местоопределения возможна с допустимой погрешностью;  - при энергетическом подавлении;
- при энергетическом подавлении; - при активном спуфинге.
- при активном спуфинге.
По окончании процедуры идентификации повторяют все операции по новому массиву достоверных измерений.
Для подтверждения достоверности результатов измерения при переходе НП из нормального состояния в искаженное или подавленное состояние и наоборот выполняют процедуру переобучения в режиме зависания РБЛА (удержания позиции), до тех пор, пока сформируется обучающая выборка, позволяющая определить, что НП находится в новом состоянии с требуемой доверительной вероятностью 0,95.
Необходимость выполнения операции переобучения вызвана тем, что при изменении состояния НП, ранее полученная вероятность перестает быть доверительной. При переходе поля из одного типового состояния в другое состояние изменяется и смещается по оси абсцисс функция правдоподобия, что приводит к уходу (возвращению) максимума апостериорной плотности от (к) максимума априорной плотности, как показано на фиг. 2. В результате между максимумами априорных и апостериорных плотностей вероятностей меняется расстояние, поэтому необходимо использовать другое пороговое значение, с помощью которого устанавливается принадлежность состояния НП к одному из типовых классов помехового воздействия.
Примеры распределения погрешностей местоопределения РБЛА, экспериментально полученные для нормального состояния НП и для случаев трех различных классов помехового воздействия представлены на фиг. 3.
Пример для нормального состояния НП или так называемого «чистого неба» приведен на фиг. 3, а). Данные результаты получены при Pdop=1, отношениях сигнал/помеха в измерительных каналах - не менее 45 дБм/Гц, ошибки времени  =1…2 нс.
=1…2 нс.
Пример для НП, находящегося в состоянии незначительно искажения, вызванного ионосферными возмущениями, представлен на фиг. 3, б). Данные результаты получены при Pdop=1…2, отношениях сигнал/помеха в измерительных каналах - 33…28 дБм/Гц, ошибки времени =2…5 нс.
Пример для НП, характеризующегося постепенным усилением степени искажения вследствие приближения РБЛА к источнику преднамеренной помехи, представлен на фиг. 3, в). Данные результаты получены при Pdop=2, отношениях сигнал/помеха в измерительных каналах - 45…25 дБм/Гц, ошибки времени =2…6 нс.
Пример для НП, подвергшегося полному энергетическому подавлению с последующим его восстановлением, представлен на фиг. 3, г). Данные результаты получены при Pdop=1…3,5, отношениях сигнал/помеха в измерительных каналах - сначала убывающих в пределах 45 … -10 дБм/Гц, а затем возрастающих в пределах -10…40 дБм/Гц, при изменениях ошибки времени от 2 до 500 нс при входе в зону помехового воздействия и от 500 до 5 нс после выхода из этой зоны.
Реализация процедуры управления логикой поведения РБЛА при движении в автономном режиме
Данная процедура представляет собой совокупность действий (операций, приемов), алгоритмически объединенных в виде блок-схемы, представленной на фиг. 4, а), б), в), г), д). Раскроем порядок выполнения процедуры в различных режимах работы.
В начальном режиме на основе информации, введенной в блок данных(102) проводят оценку состояния НП. Для этого, воспользовавшись правилами, установленными в блоках решений (103, 105, 107 и 110) оценивают состояние навигационного поля, и если оно искажено, то идентифицируют виды помехового воздействия на приемник СНС. При этом в одном из блоков отображений (104, 106, 108, 109) формируют соответствующее сообщение-сигнализацию для регистрации в памяти вычислителя.
Порядок выполнения процедуры в режиме, когда НП находится в нормальном или допустимо искаженном состоянии. В этом режиме, когда переменная GNSS_status равна 1 или 2, выполняют следующие действия (операции, приемы):
- выдают соответственно уведомляющее сообщение «Норма GNSS» или предупреждающее - «Искажение GNSS» (блоки отображений 104 или 106);
- продолжают выполнять коррекцию БИНС от навигационных данных приемника СНС- SINS_corr_SNS=1 (блок процесса 111);
- производят расчет расстояния Dist_NP и времени полета Time_ NP до навигационной точки назначения (блок типового процесса 138);
- выдают команду на выполнение маневра «Полет в точку с заданными координатами» (блок процесса 139).
В данном режиме полета РБЛА автоматически следуют по заранее заданному и записанному в память вычислителя маршруту по командам автопилота. При приближении к контрольной точке с заданными координатами на заранее заданное расстояние, которое называется радиус контрольной точки, производят установку следующей точки маршрута.
Порядок выполнения процедуры в режиме, когда НП оказывается в состоянии энергетического подавления или изменяется под воздействием активного спуфинга. В этом режиме, когда переменная GNSS_status равна 3 или 4, выполняют следующие действия (операции, приемы):
- выдают соответственно аварийное сообщение «Подавление GNSS» или «Спуфинг GNSS» (блоки отображений 108 или 109);
- производят сброс текущего полетного задания (блок процесса 112) и выдают команду на выполнение типового маневра «Стоп» для зависания (удержания позиции) на месте, для того, чтобы убедиться в достоверности результатов оценки состояния НП с требуемой доверительной вероятностью 0,95;
- отключают коррекцию БИНС от навигационных данных приемника СНС -SINS_corr_SNS=0 (блок процесса 113);
- выдают предупреждающее сообщение-сигнализацию «БИНС автономна» (блок отображения 114);
- включают коррекцию вертикального канала БИНС от барометрического высотометра (блок процесса 115);
- выдают предупреждающее сообщение-сигнализацию «Высотометр» (блок отображения 116);
- запускают таймер автономной работы БИНС Tavt (блок процесса 117);
- выдают команду на выполнение маневра «Полет в точку с заданными координатами» (блок процесса 118);
- определяют с помощью датчика скорости текущую воздушную скорость полета (блок типового процесса 119);
- рассчитывают расстояния и время полета до точек назначения (Dist_NP, Time_ NP) и посадки полетного задания (Dist_LP, Time_LP), производят расчет прогнозируемого максимально допустимого времени автономного полета tмах.avt, за которое погрешность координаты БИНС достигнет предельно допустимой величины (блоки типовых процессов 120 и 121);
- проверяют выполнение условия - время до заданной точки назначения полетного задания Time_ NP меньше максимально допустимого времени автономного полета tмах.avt (блок решения 122);
- если условие выполняется, то продолжают движение РБЛА в точку с заданными координатами в автономном режиме (блок процесса 132);
- в противном случае проверяют выполнение условия - время до точки посадки Time_ LP меньше максимально допустимого времени автономного полета tмах.avt (блок решения 123);
- если последнее условие выполняется, то прерывают полетное задание и выполняют типовой маневр движения РБЛА «Полет в точку посадки» (блок типового процесса 128);
- формируют предупреждающее сообщение-сигнализацию «Полет в точку посадки» (блок отображения 129) и выполняют процедуру посадки, в указанную в полетном задании точку;
- если время до точки посадки Time_LP больше максимально допустимого времени автономного полета tмах.avt (блок решения 123), то формируют аварийное сообщение-сигнализацию «Предел. ошибка координат!» (блок отображения 124), отменяют команду «Полет в точку с заданными координатами» (блок процесса 125),
- осуществляют процедуру «Вынужденная посадка» (блок типового процесса 126) и выдают предупреждающее сообщение-сигнализацию «Вынужденная посадка» (блок отображения 127);
- в процессе движения РБЛА в автономном режиме, в том числе при совершении типовых маневров «Полет в точку посадки» и «Вынужденная посадка», проверяют состояние КРДУ (блок решения 130);
- если КРДУ в наличии (переменная RCC_status = 1), то передают его текущие координаты и предупреждающее сообщение-сигнализацию «Возьми ручное управление»(блок отображения 131).
Порядок выполнения процедуры управления в режиме, когда НП восстанавливается до приемлемого состояния. В этом режиме выполняют следующие действия (операции, приемы):
- в процессе движения РБЛА в автономном режиме контролируют состояние НП (блок решения 133);
- если состояние НП улучшается, хотя бы до допустимого искаженного состояния, то выдают команда на выполнение типового маневра «Стоп» для зависания (удержания позиции) на месте и проверки достоверности оценки состояния НП с требуемой доверительной вероятностью 0,95 (блок процесса 134);
- отключают коррекцию вертикального канала БИНС от барометрического высотометра, включают коррекцию БИНС от навигационных данных приемника СНС (блок процесса 135);
- выдают уведомляющее сообщение-сигнализацию «БИНС норма» (блок отображения 136);
- сбрасывают таймер автономной работы БИНС (блок процесса 137);
- производят расчет расстояния Dist_NP и времени полета Time_ NP до навигационной точки назначения (блок типового процесса 138);
- выдают команду на выполнение маневра «Полет в точку с заданными координатами» (блок процесса 139).
Порядок выполнения процедуры управления в режиме обеспечения безопасности полета РБЛА. В этом режиме выполняют следующие действия (операции, приемы):
- выполняют последнюю команду, управляющую движением РБЛА, т.е. продолжают текущее полетное задание (блок процесса 140);
- периодически считывают из контроллера СБП текущее значение напряжения аккумуляторной батареи и рассчитывают расстояние Flight_range, которое может пролететь РБЛА на оставшемся заряде (блок процесса 141);
- постоянно контролируют состояние заряда аккумуляторной батареи Bat_charge (блок отображения 142);
- определяют с помощью датчика скорости воздушную скорость полета Air_speed, а с помощью ИНС путевую скорость Ground_speed, по их значениям вычисляют скорость ветра Wind_speed (блок процесса 143);
- при достижении критических значений, когда Bat_charge ≤ Limit (блок решения 142), или, когда Wind_speed>Max (блок решения 144), вырабатывают решение на аварийную посадку, для этого производят сброс текущего полетного задания и выполняют аварийную посадку (блок типового процесса 145);
- выдают аварийное сообщение-сигнализацию «Аварийная посадка» (блок отображения 146);
- при совершении типового маневра «Аварийная посадка», проверяют состояние КРДУ (блок решения 130);
- если КРДУ в наличии (переменная RCC_status = 1), то передают его текущие координаты и предупреждающее сообщение-сигнализацию «Возьми ручное управление» (блок отображения 131);
- в противных случаях, когда Bat_charge > Limit (блок решения 142) или когда Wind_speed < Max (блок решения 144), выполняют последнюю команду, управляющую движением РБЛА, завершая текущее полетное задание.
Технический эффект
Проведенный анализ способа прототипа (ближайшего аналога) показал следующее. Во-первых, реализация способа-прототипа в типовой САУП малогабаритного РБЛА невозможна без дополнительных аппаратных затрат и, следовательно, без увеличения его массогабаритных показателей. Во-вторых, спутниковый канал связи будет также эффективно подавлен средствами РЭБ. В-третьих, при отсутствии КРДУ способ-прототип не обеспечивает безопасность полета РБЛА по причине большой погрешности его местоопределения за счет БИНС, что может привести к авариям. В результате способ-прототип нельзя применять для автоматического управления движением РБЛА в автономном режиме, поскольку он не позволяет выполнить полетное задание в таких условиях.
С другой стороны, из сравнительного анализа заявляемого способа и способа-прототипа следует, что в заявляемом способе имеются новые существенные признаки, представляющие собой совокупность новых действий (операций) по обработке навигационных параметров и параметров, характеризующих состояния РБЛА и окружающей среды. Эти новые действия в соответствии с введенными правилами объединены в две процедуры: по оценке стояния НП и идентификации видов помехового воздействия на приемник СНС и по управлению логикой поведения РБЛА при его движении в автономном режиме.
Наличие в заявляемом способе новых существенных признаков в виде указанных операционных процедур, введенных неочевидным образом путем нового технического решения, позволяет достичь технического результата, а именно: обеспечить возможность выполнения полетного задания в автономном режиме полета, т.е. при отсутствии КРДУ и искаженном или подавленном НП, а также обеспечить безопасность полетов РБЛА в этом режиме.
Подтвердим это на конкретных примерах, наиболее значимых для применения РБДА.
Известно, что для малогабаритных РБЛА радиус эффективного подавления сигналов СНС современными системами РЭБ составляет примерно 2 км, при этом зона подавления, зависящая от траектории движения РБЛА и расположения средств РЭБ, может достичь 4 км. При путевой скорости полета 50 км/ч, являющейся достаточно большой для малогабаритных РБЛА мультироторного типа, время преодоления такой зоны подавления составит примерно 300 сек. За это время погрешность координат местоопределения БИНС, рассчитанная с помощью выражения (18), достигнет величины 550 м. Такая величина погрешности координат местоопределения приведет к невыполнению полетного задании, поскольку РБЛА не выйдет в точку с указанными координатами. В случае применения средствами РЭБ активного спуфинга РБЛА будет принудительно уведен со своего маршрута движения и посажен в необходимом для противника месте.
Заявляемый способ автоматического управления движением РБЛА в автономном режиме за счет новых процедур обработки навигационных данных способен преодолеть такую зону подавления. Это происходит благодаря наличию возможности обнаружить факт подавления сигналов СНС, идентифицировать вид типовой помехи, а также способности перейти в автономный режим, осуществляя навигацию с помощью БИНС и обеспечивая удержание заданной высоты полета за счет барометрического высотомера. После прохождения зоны подавления заявляемый способ позволит установить тот факт, что НП пришло в норму, включить коррекцию БИНС от приемника СНС и тем самым выйти в точку маршрута с указанными координатами. В случае обнаружения спуфинга заявляемый способ осуществляет перевод РБЛА в автономный режим полета, обеспечивая его безопасность путем выполнения типового маневра «Вынужденная посадка в указанную точку».
Кроме того, заявляемый способ в отличие от способа прототипа обеспечивает безопасность полета РБЛА путем его аварийной посадки с указанием координат места посадки в случаях большого разряда аккумуляторной батареи или критически опасной скорости приземного ветра.
Таким образом, заявляемый способ повышает эффективность управления автоматическим движением РБЛА в автономном режиме полета, когда отсутствует КРДУ, а НП находится в искаженном или подавленном состоянии, а также обеспечивает безопасность полетов в этом режиме. Его применение в САУП малогабаритных РБЛА позволит усовершенствовать алгоритмы автоматического управления РБЛА и, следовательно, расширить их функциональные возможности в автономном режиме работы.
Источники информации
1. Средства РЭБ: REX 1, REX 2, ZALA ZONTURL / Сайт компании ZALA AERO. - URL: https://zala-aero.com/production/means-of-ew/ (дата обращения 19.05.2020).
2. Матвеев В.В. Инженерный анализ погрешностей бесплатформенной инерциальной навигационной системы // Известия ТулГУ. Технические науки. 2014. Вып. 9. Ч. 2. - С. 251-267.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕСТИРОВАНИЯ ПОВЕДЕНИЯ БЛА В УСЛОВИЯХ ИСКАЖЕНИЯ ИЛИ ПОДАВЛЕНИЯ НАВИГАЦИОННОГО ПОЛЯ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2020 |
|
RU2755776C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2017 |
|
RU2685572C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
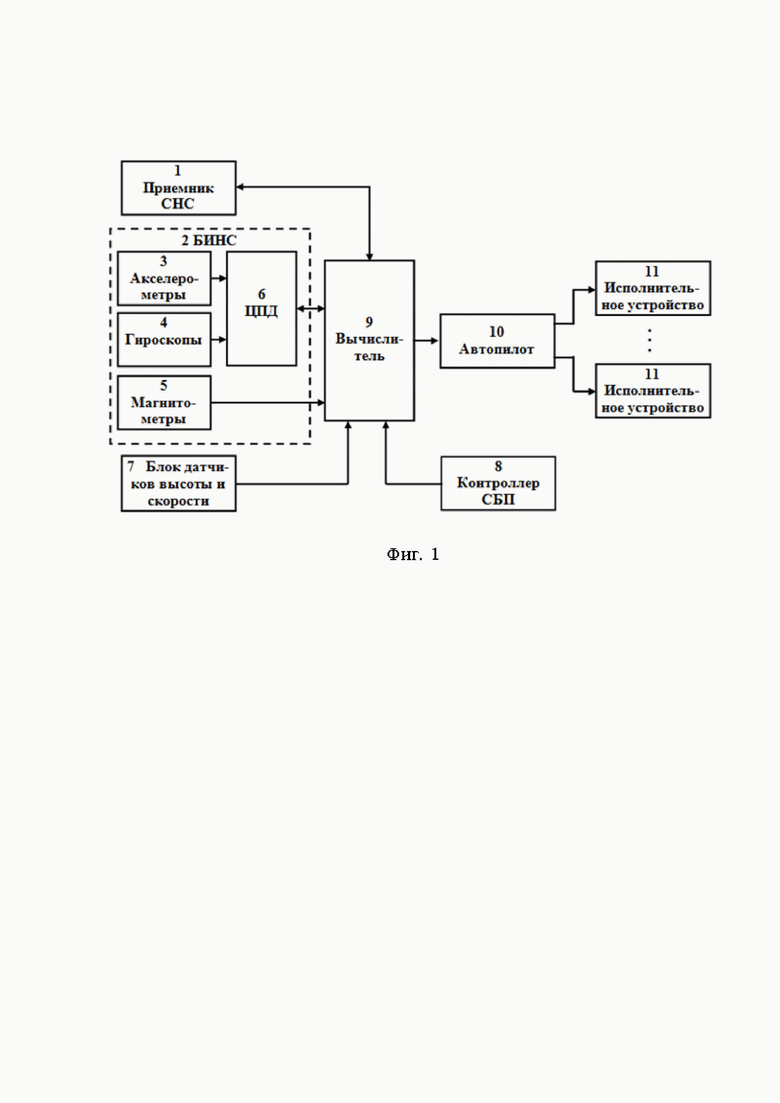
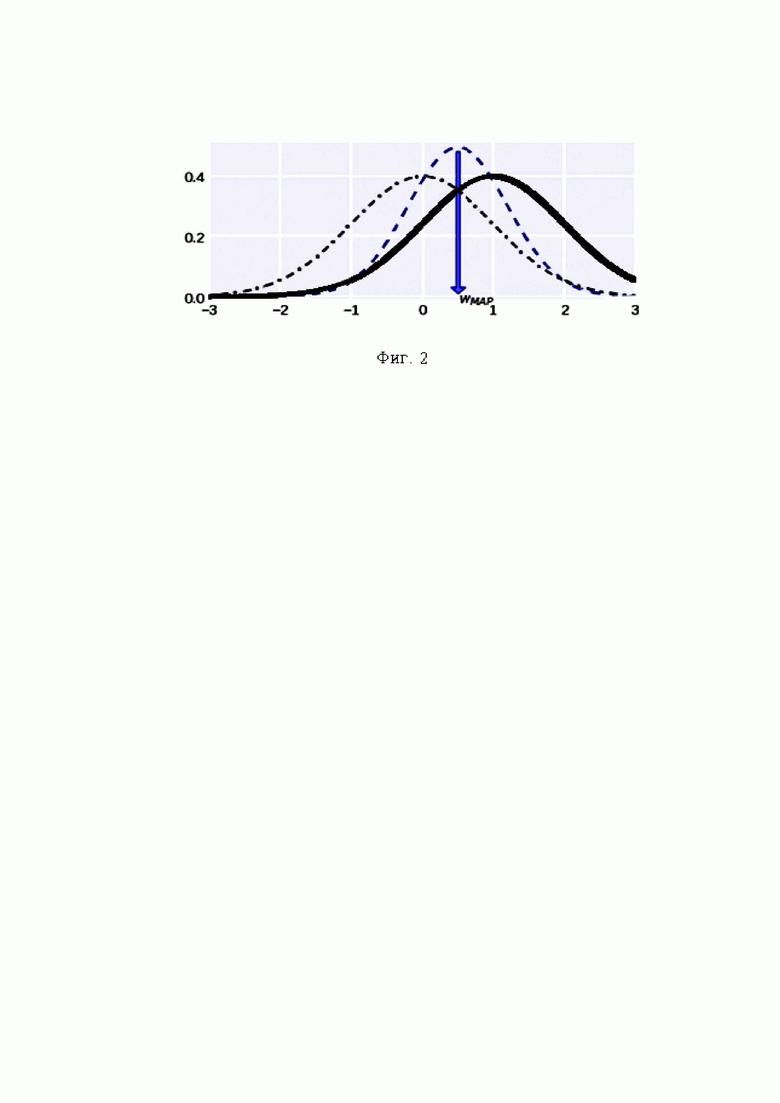
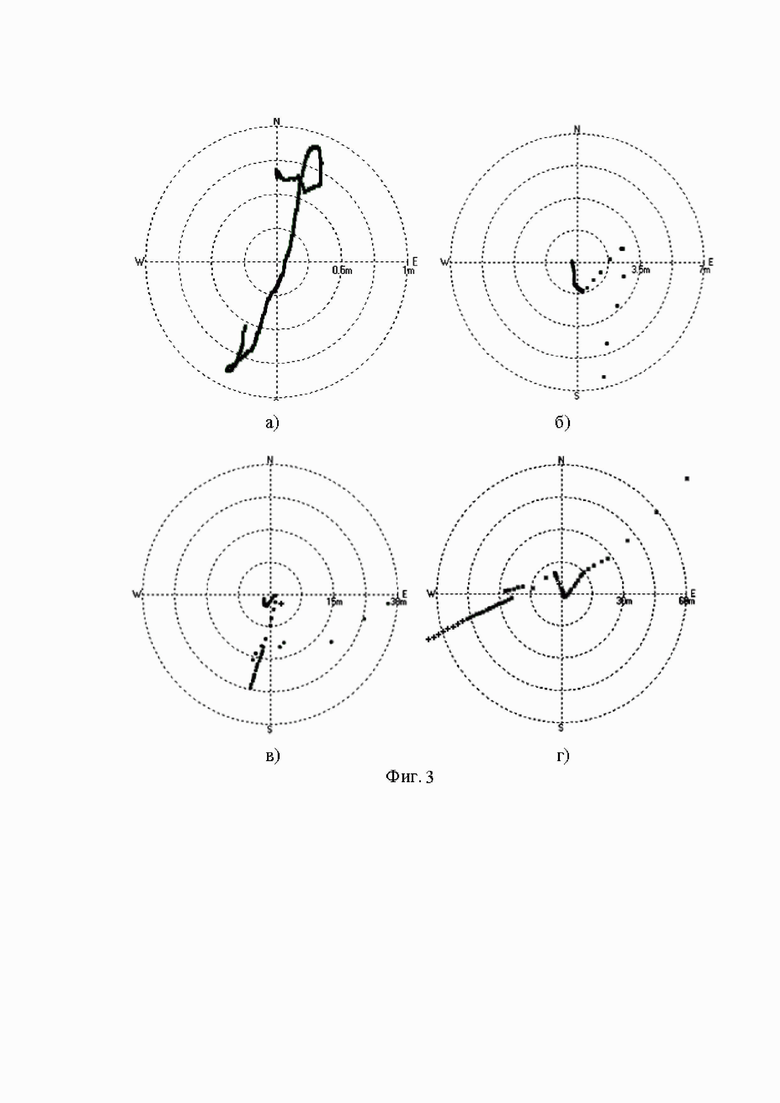
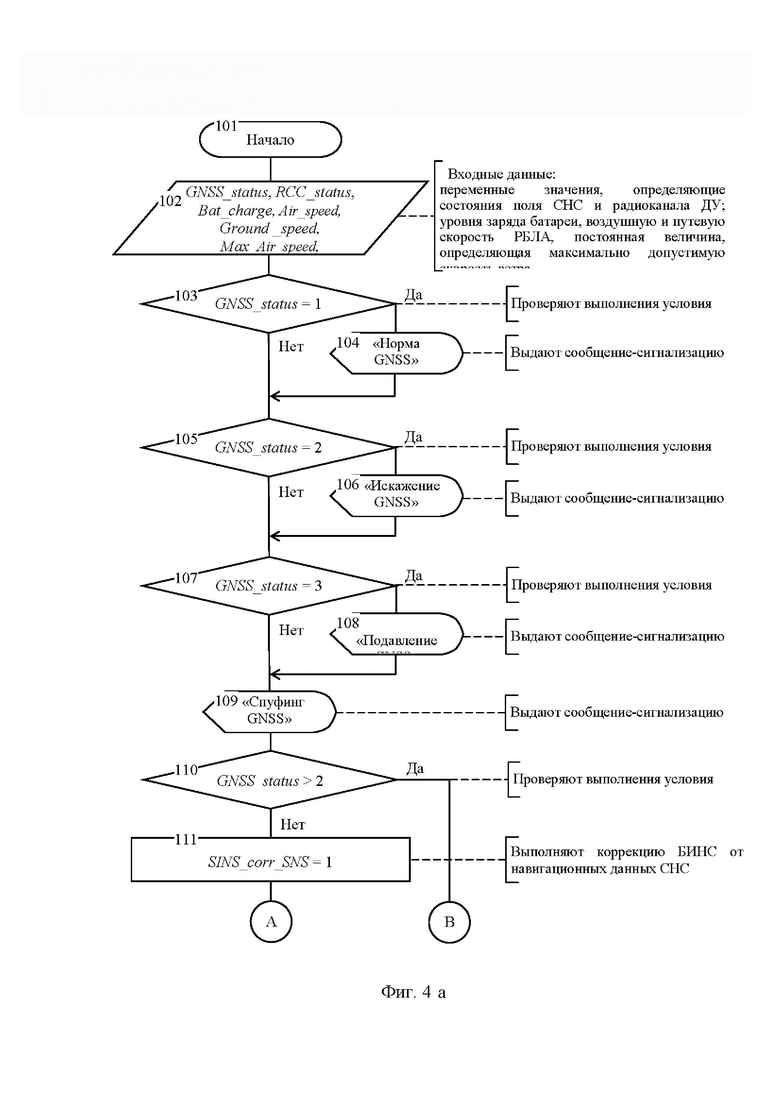
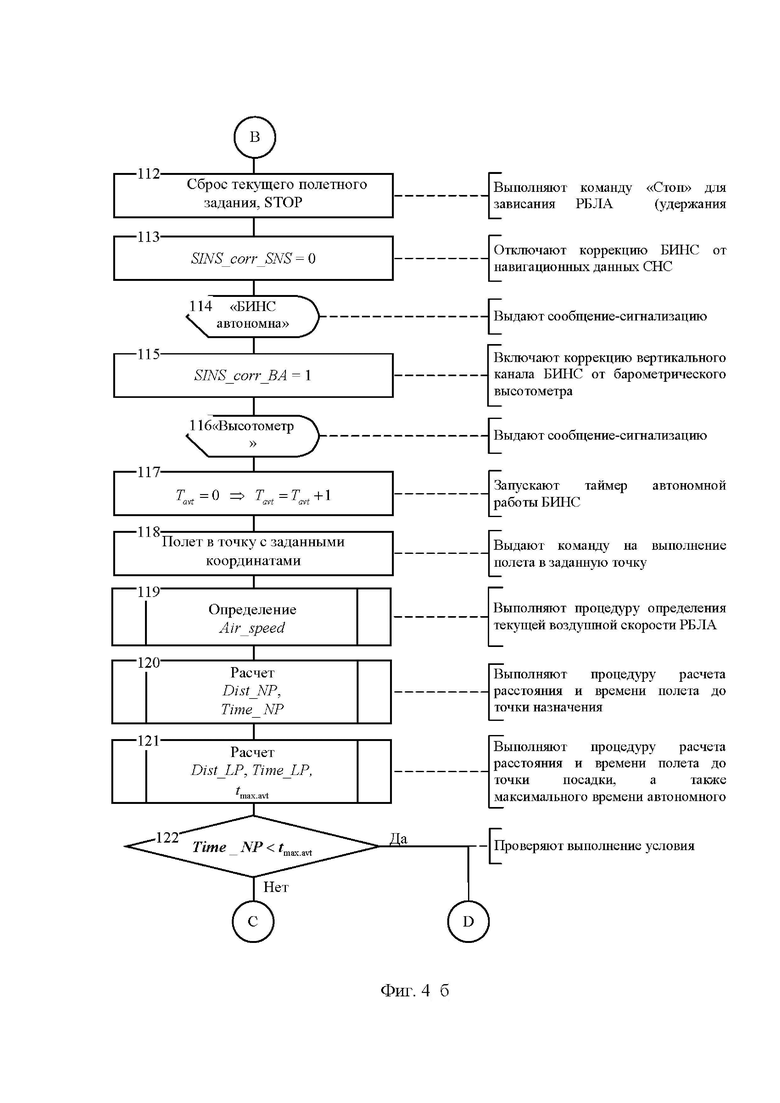
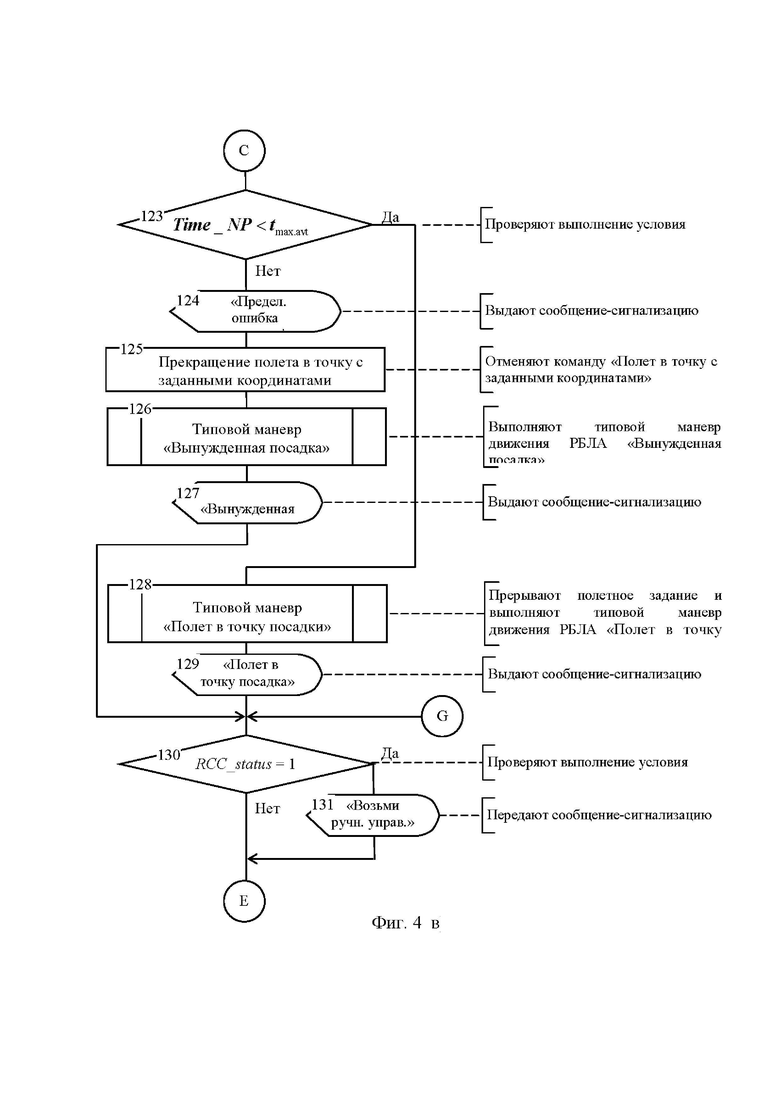
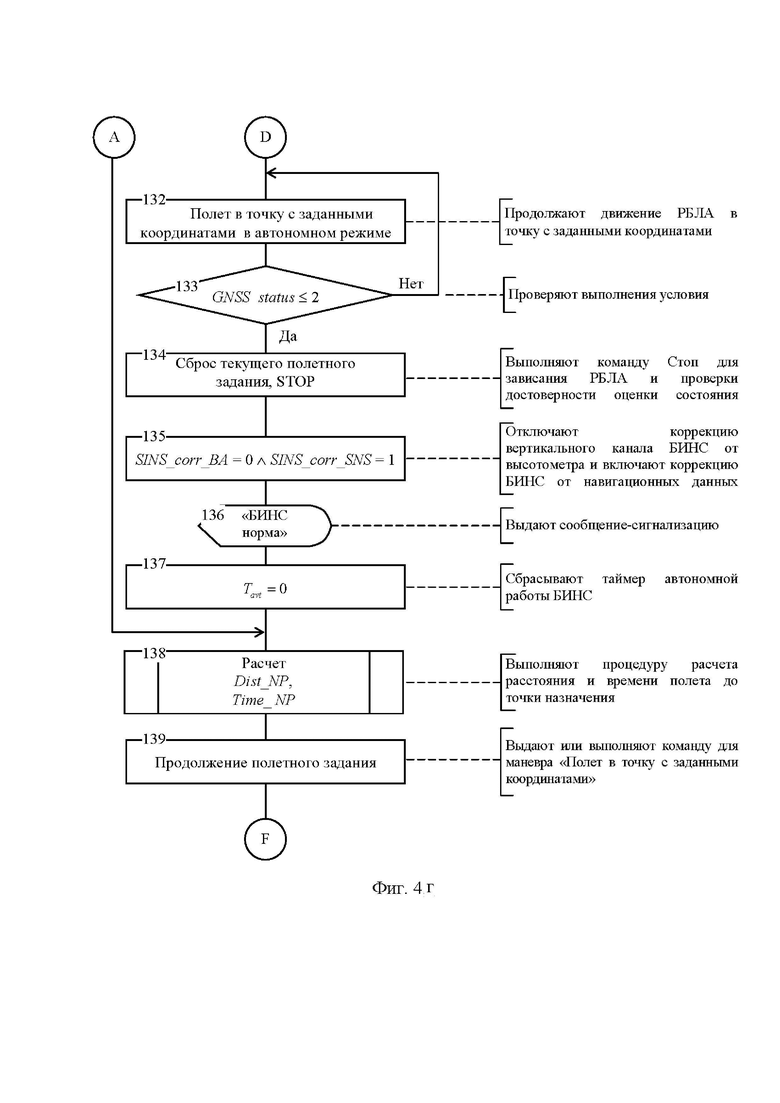
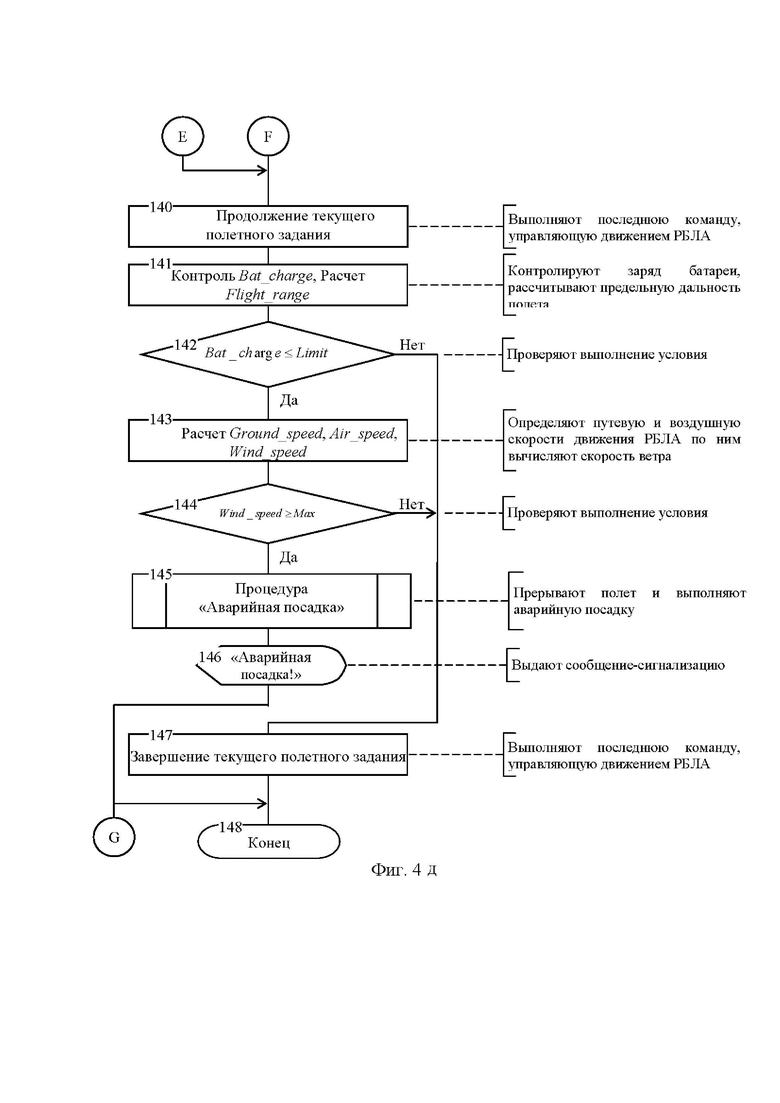
Изобретение относится к области авиационной техники, а именно к способам управления полетом малогабаритных роботизированных беспилотных летательных аппаратов. В процессе движения РБЛА оценивают состояние навигационного поля и при необходимости идентифицируют виды помехового воздействия, когда навигационное поле оказывается в наиболее опасном состоянии энергетического подавления или изменяется под воздействием активного спуфинга, то отключают коррекцию бесплатформенной инерциальной навигационной системы от навигационных данных приемника спутниковых навигационных систем и включает коррекцию от барометрического высотометра. Производят расчет прогнозируемого максимально допустимого времени автономного полета, если время до заданной точки назначения полетного задания меньше максимально допустимого времени автономного полета, то продолжают движение РБЛА в точку с заданными координатами, в противном случае полетное задание прерывают, выполняют полет в точку посадки. Обеспечивается возможность выполнения полетного задания в автономном режиме при отсутствии радиоканала дистанционного управления и искаженном или подавленном навигационном поле. Повышается безопасность полетов. 3 з.п. ф-лы, 1 табл., 8 ил.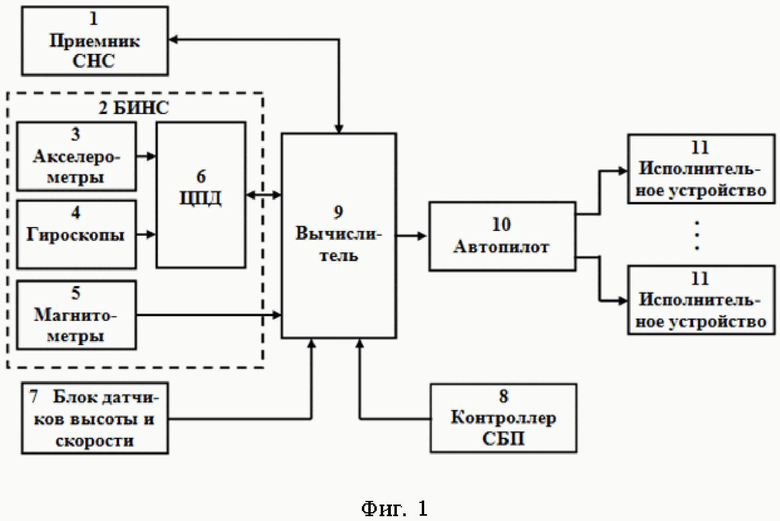
1. Способ автоматического управления движением роботизированного беспилотного летательного аппарата (РБЛА) в автономном режиме, который оборудован бортовой системой автоматического управления полетом (САУП), содержащей бесплатформенную инерциальную навигационную систему (БИНС), реализованную на акселерометрах, гироскопах, магнитометрах и цифровом процессоре движения (ЦПД), приемник спутниковых навигационных систем (СНС), блок датчиков высоты и скорости, контроллер системы бортового питания (СБП), вычислитель, автопилот и исполнительные устройства, заключающийся в том, что комплексирование БИНС и приемника СНС в интегрированную навигационную систему (ИНС) по слабосвязанной схеме осуществляют с помощью вычислителя путем реализации Калмановской фильтрации, за счет которой на основании измерений полученных от приемника СНС формируют оценку вектора состояния потребителя и разность навигационных параметров от БИНС и приемника СНС, которые используют для компенсации ошибок БИНС, сформированное в вычислителе навигационное решение передают в автопилот, с помощью которого через исполнительные устройства осуществляют управление ориентацией и движением РБЛА, реализуя программный полет по заданным точкам, при движении по маршруту определяют динамические координаты по сигналам СНС и передают их в вычислитель, в котором осуществляется сравнение полученных динамических координат с координатами плана движения и моделью маршрута, записанного в памяти вычислителя, в случае несовпадения координат передают команды автопилоту для корректировки параметров движения и маршрута на всем цикле движения до остановки (посадки) РБЛА, вырабатываемые вычислителем команды управления РБЛА включают навигационные данные о поворотных пунктах маршрута с указанием их географических координат, заданных ортодромических путевых углов, ограничений на углы пространственной ориентации при выполнении разворота, заданные значения высоты полета, путевой скорости, а также отсчет момента измерения указанных данных по шкале единого времени, причем данные об изменении конкретного параметра согласуются с возможными перегрузками и предельными режимами полета РБЛА и реализуются рядом последовательных изменений этого параметра, отличающийся тем, что в процессе движения РБЛА в автономном режиме по заданному маршруту постоянно оценивают состояние навигационного поля (НП) и при необходимости идентифицируют виды помехового воздействия, когда НП находится в нормальном или допустимо искаженном состоянии, то продолжают выполнять коррекцию БИНС от навигационных данных приемника СНС, производят расчет расстояния и времени полета до навигационной точки назначения, выдают команду на выполнение маневра «Полет в точку с заданными координатами», в случае, когда НП оказывается в состоянии энергетического подавления или изменяется под воздействием активного спуфинга, то производят сброс текущего полетного задания, выдают команду на выполнение типового маневра «Стоп» для удержания позиции (зависания РБЛА) на месте, убедившись в достоверности результатов оценки состояния НП с требуемой доверительной вероятностью, отключают коррекцию БИНС от навигационных данных приемника СНС, выдают сообщение-сигнализацию «БИНС автономна», включают коррекцию вертикального канала БИНС от барометрического высотометра, о чем выдают сообщение-сигнализацию «Высотометр», запускают таймер автономной работы БИНС, выдают команду на выполнение маневра «Полет в точку с заданными координатами», с помощью датчика скорости определяют текущую воздушную скорость полета, затем рассчитывают расстояния и время полета до точек назначения и посадки в соответствии с полетным заданием, а также производят расчет прогнозируемого максимально допустимого времени автономного полета, за которое погрешность координаты БИНС достигнет предельно допустимой величины, если время до заданной точки назначения полетного задания меньше максимально допустимого времени автономного полета, то продолжают движение РБЛА в точку с заданными координатами, в противном случае полетное задание прерывают, выполняют полет в точку посадки, для этого выдают команду и формируют сообщение-сигнализацию «Полет в точку посадки», если время до точки посадки меньше максимально допустимого времени автономного полета, то продолжают полет в точку посадки и выполняют процедуру посадки, в указанную в полетном задании точку, иначе формируют сообщение-сигнализацию «Предельная ошибка координат», выдают команду «Вынужденная посадка» и осуществляют данную процедуру, если командный радиоканал управления РБЛА в наличии, то передают его текущие координаты и сообщение-сигнализацию «Возьми ручное управление», в случае восстановления нормального состояния НП выдают команду на выполнение типового маневра «Стоп» для удержания позиции (зависания РБЛА) на месте, убедившись в достоверности результатов оценки состояния НП с требуемой доверительной вероятностью, включают коррекцию БИНС от навигационных данных приемника СНС, выдают сообщение-сигнализацию «БИНС норма», отключают коррекцию вертикального канала БИНС от барометрического высотометра, сбрасывают таймер автономной работы БИНС, выдают команду на выполнение маневра «Полет в точку с заданными координатами».
2. Способ по п. 1, отличающийся тем, что для оценки состояния НП в точке старта РБЛА в накопителе вычислителя формируют из вектора состояния потребителя СНС обучающую выборку в виде массива достоверных оценок местоопределения, одновременно извлекают из приемника СНС текущие дополнительные параметры: ошибку времени; геометрический фактор снижения точности по местоположению; отношения сигнал/помеха в измерительных каналах приемника, по которым производится расчет навигационных параметров, затем осуществляют статистическую оценку текущего состояния НП, для этого с помощью обучающей выборки данных подсчитывают априорную вероятность и рассчитывают выборочное среднее и выборочную среднеквадратичную погрешность местоопределения, которые используют для вычисления функцию правдоподобия, с помощью которой определяют доверительную вероятность текущего состояния НП, при соблюдении условия, что доверительная вероятность больше или равна установленной величины, формируют сообщение-сигнализацию «Достоверность», в процессе движения РБЛА на основании данных из массива достоверных измерений рассчитывают коэффициенты аппроксимирующего полинома, с помощью которого производят экстраполяцию координаты местоопределения для следующего временного отсчета, получают погрешность местоопределения путем сравнения текущего измерения координаты с экстраполированным значением, сравнивают погрешность местоопределения с вычисленным допустимым пороговым значением для нормального состояния НП, если это пороговое значение превышено, то принимают решение о наличии факта искажения, фиксируют этот момент времени и формируют сообщение-сигнализацию «Искажение сигнала СНС», при отсутствии искажения или помехового воздействия повторяют операции по новому массиву достоверных измерений, в случае наличия факта искажения НП сравнивают текущие отношения сигнал/помеха в измерительных каналах приемника СНС с нормативной величиной, соответствующей нормальному состоянию НП, проверяют решающее правило для идентификации активного спуфинга, выполняют решающее правило для идентификации других видов помехового воздействия, для чего сравнивают погрешность местоопределения с пороговыми значениями для типовых состояний искаженного НП, по результатам проверки принимают решение по установленному критерию о виде помехового воздействия, и формируют сообщение-сигнализацию с указанием вида помехи, по окончанию процедуры идентификации повторяют все операции по новому массиву достоверных измерений; для подтверждения достоверности результатов измерения при переходе НП из нормального состояния в искаженное или подавленное состояние и наоборот выполняют процедуру переобучения в режиме удержания позиции (зависания РБЛА) на месте, до тех пор, пока сформируется обучающая выборка, позволяющая определить, что НП находится в новом состоянии с требуемой доверительной вероятностью.
3. Способ по п. 1, отличающийся тем, что в процессе движения РБЛА в автономном режиме по заданному маршруту постоянно контролируют состояние заряда аккумуляторной батареи, для этого из контроллера СБП периодически считывают текущее значение напряжения аккумуляторной батареи и рассчитывают расстояние, которое может пролететь РБЛА на оставшемся заряде батареи, при достижении заряда критических значений вырабатывают решение на аварийную посадку, после чего производят сброс текущего полетного задания, выдают команду «Аварийная посадка» и осуществляют данную процедуру, если командный радиоканал управления дистанционного РБЛА в наличии, то передают его текущие координаты и сообщение-сигнализацию «Аварийная посадка».
4. Способ по п. 1, отличающийся тем, что в процессе движения РБЛА в автономном режиме по заданному маршруту с помощью датчика скорости определяют воздушную скорость полета, а с помощью ИНС путевую скорость, по значениям этих скоростей вычисляют скорость ветра, при достижении которой критических значений вырабатывают решение на аварийную посадку, после чего производят сброс текущего полетного задания, выдают команду «Аварийная посадка» и осуществляют данную процедуру, если командный радиоканал дистанционного управления РБЛА в наличии, то передают его текущие координаты и сообщение-сигнализацию «Аварийная посадка».
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ТРАНСПОРТНЫХ СРЕДСТВ ЦЕНТРОМ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ВОЗДУШНОМ, НАЗЕМНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2676519C1 |
| US 20080033604 A1, 07.02.2008 | |||
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| US 20190137997 А1, 09.05.2019 | |||
| US 20180276995 А1, 27.09.2018. | |||

