Изобретение относится к области измерительной техники и электрических машин.
Известен способ контроля погрешности следования произвольно выбранных пар вращающихся трансформаторов (ВТ) в дистанционной передаче или с эталонным устройством. В этом случае ВТ-датчик и ВТ-приемник устанавливают в угломерных устройствах, позволяющих осуществлять повороты их роторов на любые углы с погрешностью не более:
- ±2 угл. с - при контроле с погрешностью следования ±6 и ±12 угл. с;
- ±5 угл. с - при контроле с погрешностью следования ±18 и ±30 угл. с; и включают в схему дистанционной передачи.
После подачи напряжения на ВТ-датчик, установленный в нулевое положение, ротор ВТ-приемника устанавливают в согласованное положение, соответствующее наименьшему показанию узкополосного вольтметра, подключенного к выходной обмотке ВТ-приемника. Ротор ВТ-датчика поворачивают в пределах угла 0-360 угл. град ступенями по 10 угл. град. Ротор ВТ-приемника поворачивают каждый раз до положения согласования, которое определяется в момент наименьшего показания узкополосного вольтметра. Значение погрешности в рассматриваемой угловой координате определяют как разность показаний угла на угломерных устройствах.
За погрешность следования в дистанционной передаче произвольно выбранных пар ВТ или с эталонным устройством принимают полусумму абсолютных значений наибольшего отрицательного и наибольшего положительного отклонений ротора ВТ-приемника в положении согласования от угла поворота ротора ВТ-датчика.
Недостатком этого способа является низкая точность при контроле самых точных из существующих двухполюсных ВТ. Например, ВТ типов ВТ-7 и ВТ-5 имеют погрешность следования в лучшем случае для высшего класса точности ±60 угл. с.Целенаправленным отбором удается подобрать ВТ более высокого класса точности (±30 угл. с). Но и в этом случае задача в полной мере не решается. Следовательно, подобрать хотя бы образцовый (не эталонный) ВТ с соотношением по точности 1:3 (образцовый/контролируемый) не представляется возможным.
Такая же ситуация имеет место при контроле аналого-цифровых преобразователей сигналов ВТ (АЦПВТ) в цифровой код. Например, при формировании одноотсчетного 16-разрядного преобразователя угол-параметр-код, когда подключают 16-разрядный АЦПВТ к ВТ (при их раздельной поставке). В частности, конкретный случай, когда к ВТ типа ВТ-5 (по КФО.303.006 ТУ) подключается АЦПВТ-16М-0 (по ПИЖМ. 468157.029 ТУ). Погрешность угловых координат смены значений кода указанного АЦПВТ согласно техническим условиям на него составляет ±40 угл. с, то есть погрешности ВТ и АЦПВТ близки. Следовательно, при контроле одноотсчетных 16-разрядных АЦПВТ сталкиваемся стой же проблемой.
Целью изобретения является повышение точности способа контроля ВТ и АЦПВТ. Эта цель достигается тем, что
1 в способ контроля и оценки точности ВТ и АЦПВТ их сигналов в код заключающийся в том, что контролируемый (первый) ВТ включают в схему дистанционной передачи, в которой эталонный (второй) ВТ-датчик и контролируемый ВТ устанавливают в угломерные устройства, подают напряжение на датчик, установленный в нулевое положение, ротор контролируемого ВТ устанавливают в согласованное положение, соответствующее наименьшему показанию узкополосного вольтметра, подключенного к выходной обмотке контролируемого ВТ, ротор датчика поворачивают в пределах угла 0-360 угл. град ступенями по 10 угл. град, ротор контролируемого ВТ поворачивают каждый раз до положения согласования, фиксируют показание угломерного устройства, с которым кинематически соединен контролируемый ВТ, вычитают из этого показания значение угла на угломерном устройстве, с которым кинематически соединен датчик, получают значение погрешности контролируемого ВТ в данной угловой координате, отличающийся тем, что применяют для контроля третий ВТ, включают все три ВТ попарно в дистанционную передачу первого со вторым, второго с третьим, первого с третьим, измеряют погрешность следования каждой пары в выбранных угловых координатах, которые располагаются не с равными ступенями по углу в диапазоне 0-360 угл. град, применяют для контроля АЦПВТ, близкий к ВТ по точности, подключают его поочередно к каждому ВТ, установленному в угломерное устройство, измеряют погрешность координат смены значений кода в тех же угловых координатах, что и при измерении погрешности следования в дистанционной передаче, определяют погрешность контролируемого ВТ в каждой угловой координате по формуле

где Δ1i - погрешность контролируемого (первого) ВТ; E21i и E23i - погрешности координат смены значений кода, получаемые при измерении преобразователя угол-параметр-код, сформированного поочередно соответственно из первого и третьего ВТ и АЦПВТ;  - погрешность следования дистанционной передачи, составленной из первого и третьего ВТ; i=1, 2, …, n - индекс, обозначающий номер измеряемой угловой координаты; определяют погрешности второго и третьего ВТ соответственно по формулам
- погрешность следования дистанционной передачи, составленной из первого и третьего ВТ; i=1, 2, …, n - индекс, обозначающий номер измеряемой угловой координаты; определяют погрешности второго и третьего ВТ соответственно по формулам


где E22i - погрешность координат смены значений кода, полученная при измерении второго ВТ с подключенным к нему АЦПВТ;  и
и  - погрешности следования в дистанционной передаче, составленной соответственно из первого со вторым ВТ и второго с третьим.
- погрешности следования в дистанционной передаче, составленной соответственно из первого со вторым ВТ и второго с третьим.
2 Способ по п. 1 контроля точности АЦПВТ, отличающийся тем, что его погрешность вычисляют по формулам



где E21i(A), E22i(A) и E23i(A) - погрешность координат смены значений кода АЦПВТ, полученная с первым, вторым и с третьим ВТ. (А) - не степень, а верхний индекс, означающий что погрешность относится к АЦПВТ.
Формулы для обработки результатов измерений получены следующим образом. Составлялись уравнения погрешностей. Три уравнения для ВТ.



Здесь и далее с целью упрощения индекс «i» в формулах опущен. Составлялись и три уравнения для преобразователей угол-параметр-код.



где  -погрешность следования в дистанционной передаче, составленной из первого и второго ВТ,
-погрешность следования в дистанционной передаче, составленной из первого и второго ВТ,  - то же, составленной из второго и третьего ВТ,
- то же, составленной из второго и третьего ВТ,  - то же, составленной из первого и третьего ВТ; Δ1, Δ2, Δ3 - погрешность, которую фактически имеет соответственно первый, второй и третий ВТ; Е21, Е22, Е23 - погрешность координат смены значений кода преобразователя угол-параметр-код, формируемого при подключении к АЦПВТ соответственно первого, второго и третьего ВТ,
- то же, составленной из первого и третьего ВТ; Δ1, Δ2, Δ3 - погрешность, которую фактически имеет соответственно первый, второй и третий ВТ; Е21, Е22, Е23 - погрешность координат смены значений кода преобразователя угол-параметр-код, формируемого при подключении к АЦПВТ соответственно первого, второго и третьего ВТ,  - погрешность координат смены значений кода АЦПВТ.
- погрешность координат смены значений кода АЦПВТ.
Продолжение преобразований. При вычитании из уравнения (4) уравнения (6) получено уравнение E21-E23=Δ1-Δ3 (7). Из уравнения (3) определено  его значение подставлено в уравнение (7). Тогда
его значение подставлено в уравнение (7). Тогда  Отсюда
Отсюда

Аналогично получены и следующие уравнения


Проведя аналогичные выкладки применительно к погрешности АЦПВТ (E2(А)), было получено уравнение по определению ее значения
 и т.д.
и т.д.
Работоспособность и эффективность предложенного способа подтверждается следующим образом. Были проведены шесть циклов измерений. Три цикла включали в себя измерения погрешности следования в дистанционной передаче ВТ типа ВТ-5. В каждом цикле измерения осуществлялись в 129 угловых координатах, включая нулевой. При этом ступени измерения были неравные. Выбор измеряемых угловых координат осуществлялся в соответствии с рекомендациями стандарта ГОСТ РВ 53015-2003. «Преобразователи угла цифровые. Общие технические условия». Это обусловлено тем, что эти же ВТ входили в состав преобразователей угол-параметр-код, погрешность Е2 которых измерялась в соответствии с требованиями указанного стандарта. В качестве электронного преобразователя сигналов ВТ в код в этом случае использовался одноотсчетный 16-разрядный преобразователь типа АЦПВТ-16П-01К.
Результаты измерений приведены в таблице. Все измеренные и посчитанные значения приведены в угловых секундах. В таблицу помещена лишь 1/6 часть результатов проведенных измерений. Были выбраны в первую очередь те угловые координаты, в которых имели место экстремальные и близкие к ним значения по каждому виду погрешности. Экстремальные значения выделены.
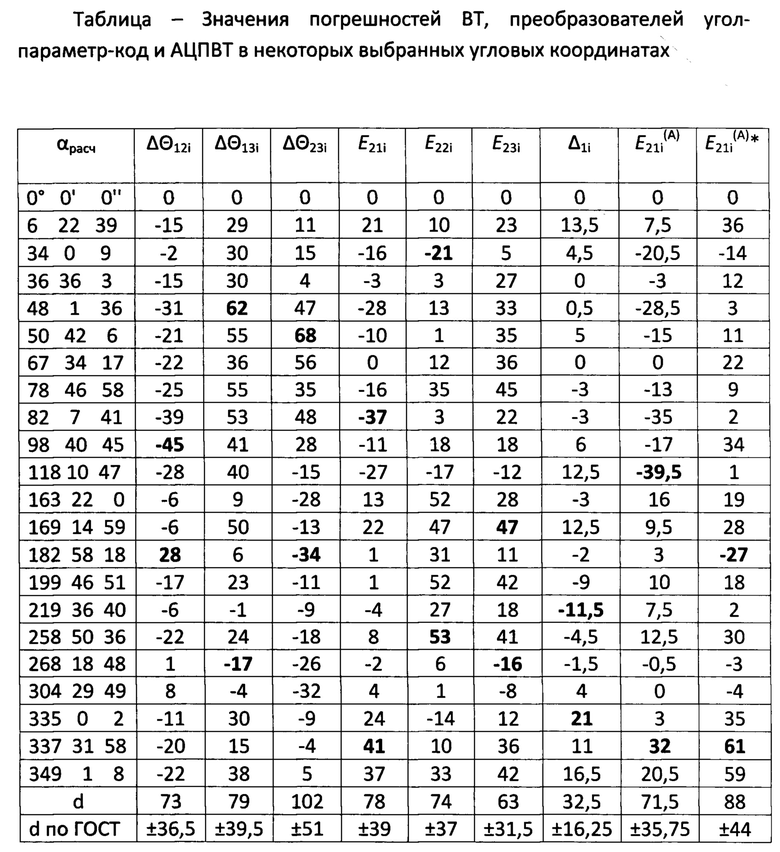
В последней и предпоследней строке таблицы приведены значения диапазона каждой рассматриваемой погрешности. Из этих строк видно, что диапазон погрешности ВТ, получаемой по предлагаемому способу (Δ1i) существенно (в 2,25 раза) меньше, чем при измерении в дистанционной передаче  а именно: ±36,5/±16,25=2,25. (Использовались значения погрешностей согласно стандарту).
а именно: ±36,5/±16,25=2,25. (Использовались значения погрешностей согласно стандарту).
Погрешность Е2 АЦПВТ, получаемая по предлагаемому способу (E21i(A)) тоже меньше (в 1,23 раза) погрешности, которую получали существующим способом как разность  то есть ±44/±35,75=1,23.
то есть ±44/±35,75=1,23.
Источник информации принятый во внимание при экспертизе: ГОСТ РВ 51816. 10 - 2001. «Трансформаторы вращающиеся. Групповые технические условия».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ ПРЕОБРАЗОВАТЕЛЯ УГОЛ - ПАРАМЕТР - КОД С БЕСКОРПУСНОЙ ИНФОРМАЦИОННОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2010426C1 |
| УСТРОЙСТВО КОНТРОЛЯ ТОЧНОСТИ АНАЛОГОВОГО И ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЕЙ УГЛА | 2014 |
|
RU2575467C1 |
| УСТРОЙСТВО КОНТРОЛЯ ТОЧНОСТИ ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА | 2015 |
|
RU2577186C1 |
| Способ измерения погрешности вращающегося трансформатора | 1973 |
|
SU544060A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПЕРЕХОДНОГО СОПРОТИВЛЕНИЯ КОНТАКТНОГО УЗЛА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2012 |
|
RU2527655C2 |
| Устройство измерения времени разгона вала электродвигателя | 2022 |
|
RU2796152C1 |
| Устройство для измерения погрешности вращающегося трансформатора | 1989 |
|
SU1653083A2 |
| Устройство для измерения погрешности вращающегося трансформатора | 1973 |
|
SU479135A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ ОТОБРАЖЕНИЯ ТАНГЕНСНОЙ ЗАВИСИМОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2012 |
|
RU2526583C2 |
Изобретение относится к оценке точности вращающихся трансформаторов (ВТ) и аналого-цифровых преобразователей их сигналов в код (АЦПВТ). Технический результат заключается в повышении точности способа путем определения действительной погрешности, которую имеет контролируемый ВТ (и АЦПВТ) за счет исключения при обработке результатов измерений погрешности второго и третьего ВТ, включаемых при измерениях как в дистанционную передачу, так и при подключении к ним АЦПВТ. Для этого предложен способ, в котором в отличие от существующего измерение погрешности следования ВТ в дистанционной передаче осуществляют с помощью трех ВТ одного типа, при этом формируют три пары: первого ВТ со вторым, второго с третьим, первого с третьим. Измерения проводят в угловых координатах, определяемых по методике, указанной в стандарте на цифровые преобразователи угла вида общих технических условий. Получают три массива погрешностей. Эти же ВТ измеряют в тех же угловых координатах и с АЦПВТ самой высокой разрядности. Также получают три массива погрешностей. 1 з.п. ф-лы, 1 табл.
1. Способ контроля и оценки точности вращающихся трансформаторов и аналого-цифровых преобразователей их сигналов в код, заключающийся в том, что контролируемый (первый) вращающийся трансформатор включают в схему дистанционной передачи, в которой эталонный (второй) вращающийся трансформатор-датчик и контролируемый вращающийся трансформатор устанавливают в угломерные устройства, подают напряжение на датчик, установленный в нулевое положение, ротор контролируемого вращающегося трансформатора устанавливают в согласованное положение, соответствующее наименьшему показанию узкополосного вольтметра, подключенного к выходной обмотке контролируемого вращающегося трансформатора, ротор датчика поворачивают в пределах угла 0-360 угл. град ступенями по 10 угл. град, ротор контролируемого вращающегося трансформатора поворачивают каждый раз до положения согласования, фиксируют показание угломерного устройства, с которым кинематически соединен контролируемый вращающийся трансформатор, вычитают из этого показания значение угла на угломерном устройстве, с которым кинематически соединен датчик, получают значение погрешности контролируемого вращающегося трансформатора в данной угловой координате, отличающийся тем, что применяют для контроля третий вращающийся трансформатор, включают все три вращающихся трансформатора попарно в дистанционную передачу первого со вторым, второго с третьим, первого с третьим, измеряют погрешность следования каждой пары в выбранных угловых координатах, которые располагаются не с равными ступенями по углу в диапазоне 0-360 угл. град, применяют для контроля аналого-цифровой преобразователь сигналов вращающегося трансформатора в код, близкий вращающимся трансформаторам по точности, подключают его поочередно к каждому вращающемуся трансформатору, установленному в угломерное устройство, измеряют погрешность координат смены значений кода в тех же угловых координатах, что и при измерении погрешности следования в дистанционной передаче, определяют погрешность контролируемого вращающегося трансформатора в каждой угловой координате по формуле
Δ1i=(E21i-E23i+ΔΘ13i)/2,
определяют погрешности второго и третьего вращающихся трансформаторов соответственно по формулам
Δ2i=(E22i-E21i+ΔΘ12i)/2; Δ3i=(E23i-E22i+ΔΘ23i)/2;
где Δ1i - погрешность контролируемого (первого) вращающегося трансформатора; E21i и E23i - погрешности координат смены значений кода, получаемые при измерении преобразователя угол-параметр-код, сформированного соответственно из первого и третьего поочередно вращающихся трансформаторов и аналого-цифрового преобразователя их сигналов в код; ΔΘ13i - погрешность следования дистанционной передачи, составленной из первого и третьего вращающихся трансформаторов; i=1, 2, …, n - индекс, обозначающий номер измеряемой угловой координаты; E22i - погрешность координат смены значений кода, полученная при измерении второго вращающегося трансформатора с подключенным аналого-цифровым преобразователем его сигналов в код; ΔΘ12i и ΔΘ23i - погрешности следования в дистанционной передаче, составленной соответственно из первого со вторым вращающимся трансформатором и второго с третьим.
2. Способ по п. 1 контроля точности аналого-цифрового преобразователя сигналов вращающегося трансформатора в код, отличающийся тем, что его погрешность вычисляют по формулам
E21i(A)=(E21i+E23i-ΔΘ13i)/2; E22i(A)=(E22i+E21i-ΔΘ12i)/2;
E23i(A)=(E23i+E22i-ΔΘ23i)/2,
где E21i(А), E22i(A) и E23i(A) - погрешности координат смены значений кода аналого-цифрового преобразователя сигналов вращающегося трансформатора в код, полученные соответственно при измерении с первым, вторым и третьим вращающимися трансформаторами; (А) - верхний индекс.
| Устройство для измерения погрешности вращающихся трансформаторов | 1974 |
|
SU474836A1 |
| Устройство для дистанционной передачи угла | 1975 |
|
SU538387A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1992 |
|
RU2046514C1 |
| CN 102818952 A, 12.12.2012. | |||

