Область техники
Настоящее изобретение относится к системе, выполненной с возможностью регулировки изменения  производной по времени динамического крутящего момента согласно ограничительной части пункта 1 формулы изобретения. Настоящее изобретение также относится к способу регулировки изменения производной по времени динамического крутящего момента согласно ограничительной части пункта 14 формулы изобретения и к компьютерной программе и компьютерному программному продукту, которые осуществляют способ согласно изобретению.
производной по времени динамического крутящего момента согласно ограничительной части пункта 1 формулы изобретения. Настоящее изобретение также относится к способу регулировки изменения производной по времени динамического крутящего момента согласно ограничительной части пункта 14 формулы изобретения и к компьютерной программе и компьютерному программному продукту, которые осуществляют способ согласно изобретению.
Уровень техники
Следующее далее описание предпосылок создания изобретения представляет собой описание предпосылок создания настоящего изобретения, которые, однако, не обязательно представляют собой известный уровень техники.
Транспортные средства, такие как, например, легковые автомобили, автобусы и грузовики, приводятся в движение крутящим моментом двигателя, производимым двигателем транспортного средства. Этот крутящий момент двигателя подается на ведущие колеса транспортного средства через силовую передачу транспортного средства. Силовая передача содержит диапазон инерций, податливостей при кручении, демпфирующих компонентов, то есть силовая передача в той или иной степени может оказывать влияние на крутящий момент двигателя, передаваемый на ведущие колеса. Таким образом, силовая передача имеет податливость/гибкость при кручении и люфт, то есть колебания крутящего момента и/или оборотов, так называемые колебания силовой передачи, могут возникать в транспортном средстве, например, при запуске транспортного средства, когда крутящий момент запрашивается от двигателя. Эти колебания крутящего момента и/или оборотов возникают, когда силы, создаваемые в силовой передаче в период между обеспечением двигателем крутящего момента и троганием транспортного средства, высвобождаются при трогании транспортного средства. Колебания силовой передачи могут вызывать качание транспортного средства в продольном направлении, как описано более подробно ниже. Эти качающиеся движения транспортного средства очень неприятны для водителя транспортного средства.
В связи с этим в некоторых решениях известного уровня техники для исключения этих колебаний силовой передачи были использованы превентивные стратегии при запросе крутящего момента двигателя. Такие стратегии могут использовать ограниченные изменения крутящего момента при запросе крутящего момента двигателя, причем эти изменения крутящего момента подобраны так, что запрашиваемый крутящий момент двигателя ограничивается таким образом, что колебания силовой передачи уменьшаются или не вообще возникают.
Краткое описание изобретения
Изменения крутящего момента, которые в настоящее время используются при запросе крутящего момента двигателя, накладывают ограничение на то, какой крутящий момент может быть запрошен двигателем транспортного средства. Это ограничение необходимо в соответствии с решениями известного уровня техники для уменьшения неблагоприятных колебаний силовой передачи. Обеспечение свободного запроса крутящего момента водителем и/или, например, системой круиз-контроля при использовании систем текущего уровня техники часто приводит к ощутимым и неблагоприятным колебаниям силовой передачи, поэтому используются ограничивающие изменения крутящего момента.
Ограничивающие изменения крутящего момента в текущем уровне техники обычно являются статическими. Статические изменения крутящего момента, которые также могут называться статические крутящие моменты, имеют преимущество в том, что они имеют очень ограниченную сложность, что является одной из причин того, почему они так часто используются. Однако статические изменения крутящего момента имеют ряд недостатков, связанных с тем, что они не оптимизированы для всех событий при движении, которым может быть подвержено транспортное средство. Для определенных режимов движения статические и ограниченные изменения крутящего момента приводят к снижению производительности транспортного средства, так как вследствие изменения крутящего момента запрашиваемый крутящий момент становится слишком низким для режимов движения, в которых было бы возможным запросить больший крутящий момент двигателя без возникновения колебаний силовой передачи. Для других режимов движения изменение крутящего момента не ограничивает запрашиваемый крутящий момент в достаточной степени, то есть возникают колебания силовой передачи, и в связи с этим качающиеся перемещения транспортного средства. В связи с этим использование изменений крутящего момента для определенных режимов движения обеспечивает неоптимальные крутящие моменты, что может приводить к нежелательному снижению производительности транспортного средства и/или снижающему комфорт качанию, вызванному колебаниями силовой передачи.
В связи с этим одна цель настоящего изобретения заключается в обеспечении способа и системы регулировки изменения производной по времени динамического крутящего момента, что по меньшей мере частично решает эти проблемы.
Эта цель достигается посредством вышеуказанной системы в соответствии с отличительными признаками, изложенными в пункте 1 формулы изобретения. Цель также достигается посредством вышеуказанного способа согласно отличительной части пункта 14 формулы изобретения и вышеуказанной компьютерной программы и компьютерного программного продукта.
Настоящее изобретение относится к регулировке изменения производной по времени динамического крутящего момента, который подается на выходной вал от двигателя транспортного средства.
Согласно настоящему изобретению требуемое изменение производной по времени определяется для динамического крутящего момента, причем изменение происходит с текущего значения  на новое требуемое значение
на новое требуемое значение  динамического крутящего момента.
динамического крутящего момента.
Текущая разность  скоростей вращения устанавливается между первым концом силовой передачи транспортного средства, вращающимся с первой скоростью
скоростей вращения устанавливается между первым концом силовой передачи транспортного средства, вращающимся с первой скоростью  вращения, и вторым концом силовой передачи, вращающимся со второй скоростью
вращения, и вторым концом силовой передачи, вращающимся со второй скоростью  вращения.
вращения.
Первая скорость двигателя далее регулируется на основании требуемого значения производной по времени динамического крутящего момента, на основании коэффициента  жесткости, связанного с податливостью при кручении силовой передачи, и на основании определенной текущей разности скоростей.
жесткости, связанного с податливостью при кручении силовой передачи, и на основании определенной текущей разности скоростей.
Посредством регулировки первой скорости вращения изменение производной по времени динамического крутящего момента также косвенно регулируется в направлении требуемого значения .
Таким образом, настоящее изобретение обеспечивает регулировку производной по времени/градиента  динамического крутящего момента путем обеспечения изменений этого градиента/производной. Обеспеченные изменения производной по времени динамического крутящего момента могут быть использованы для достижения направления/градиента графика, соответствующего производной по времени. Это достигнутое направление/градиент, т.е. производная по времени динамического крутящего момента, далее может быть использовано в качестве подходящих исходных значений для дальнейшей регулировки динамического крутящего момента
динамического крутящего момента путем обеспечения изменений этого градиента/производной. Обеспеченные изменения производной по времени динамического крутящего момента могут быть использованы для достижения направления/градиента графика, соответствующего производной по времени. Это достигнутое направление/градиент, т.е. производная по времени динамического крутящего момента, далее может быть использовано в качестве подходящих исходных значений для дальнейшей регулировки динамического крутящего момента  .
.
Посредством настоящего изобретения быстрые изменения производной по времени динамического крутящего момента могут выполняться по существу мгновенно, то есть оптимизация регулировки динамического крутящего момента может быть проще для увеличения производительности транспортного средства и/или повышения комфорта водителя.
Эти быстрые изменения производной по времени динамического крутящего момента, например, могут быть использованы в связи с замедлением перед и/или после операции переключения передачи, при ускорении до и/или после операции переключения передачи и/или для других событий, при которых должен быть изменен динамический крутящий момент.
Согласно настоящему изобретению профиль запрашиваемого крутящего момента  образован таким образом, что динамический крутящий момент имеет по меньшей мере частично по существу равномерный и неколеблющийся профиль или по меньшей мере обеспечивает колебания значительно меньшей амплитуды, чем в известном уровне техники. Настоящее изобретение приводит к колебаниям, которые не оказывают отрицательного влияния на комфорт в транспортном средстве.
образован таким образом, что динамический крутящий момент имеет по меньшей мере частично по существу равномерный и неколеблющийся профиль или по меньшей мере обеспечивает колебания значительно меньшей амплитуды, чем в известном уровне техники. Настоящее изобретение приводит к колебаниям, которые не оказывают отрицательного влияния на комфорт в транспортном средстве.
Таким образом, колебания силовой передачи могут быть уменьшены по количеству и/или величине для нескольких режимов движения, в которых предыдущие регулировки запрашиваемого крутящего момента привели бы к нежелательному качанию транспортного средства. Эти режимы движения включают в себя начало запроса крутящего момента от двигателя, так называемый «TIPIN», и прекращение запроса крутящего момента от двигателя, так называемый «TIPOUT». Настоящее изобретение также уменьшает колебания силовой передачи для режимов движения, содержащих люфт силовой передачи (другими словами, когда, например, зубья двух зубчатых колес в коробке передач в течение короткого периода времени не зацепляются для того, чтобы позже зацепиться снова), который может, например, возникать при переходе между прихватыванием двигателя и ускорением/запросом крутящего момента при включении сцепления, или для вышеуказанной операции переключения передачи. В связи с этим для всех этих режимов движения настоящее изобретение может предотвращать качание транспортного средства, вызванное колебаниями силовой передачи, в результате чего комфорт водителя повышается.
Колебания силовой передачи, вызванные внешним воздействием, например, неровностью дороги, также могут быстро уменьшаться и/или гаситься с использованием настоящего изобретения.
Кроме того, использование настоящего изобретения также обеспечивает значительное уменьшение износа силовой передачи транспортного средства. Уменьшение износа, достигаемое настоящим изобретением, обеспечивает более длительный срок службы силовой передачи, что, разумеется, является предпочтительным.
краткое описание чертежей
Изобретение будет проиллюстрировано более подробно ниже вместе с приложенными чертежами, на которых одинаковые ссылочные позиции используются для обозначения одинаковых элементов, и на которых:
Фиг. 1 показывает примерное транспортное средство;
Фиг. 2 показывает блок-схему способа согласно одному варианту выполнения настоящего изобретения;
Фиг. 3 показывает устройство регулировки, в котором может осуществляться способ согласно настоящему изобретению;
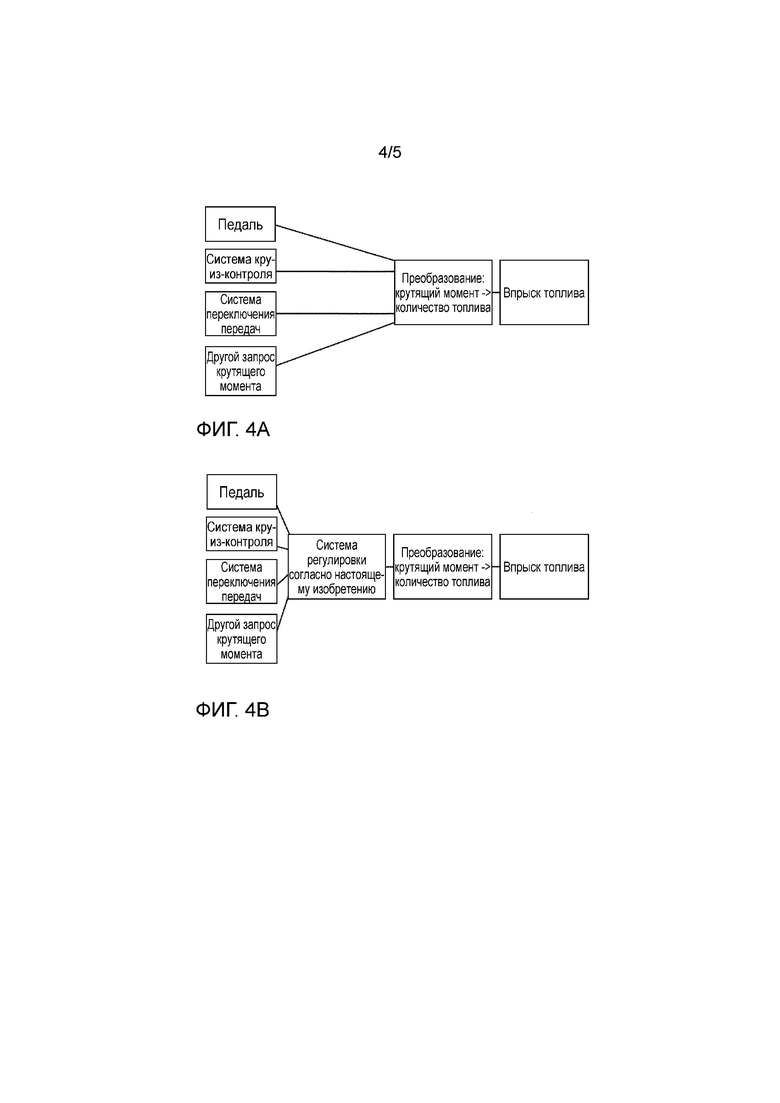
Фиг. 4a-4b схематически показывают структурную схему систем впрыска топлива известного уровня техники и системы впрыска топлива, содержащей систему регулировки согласно настоящему изобретению; и
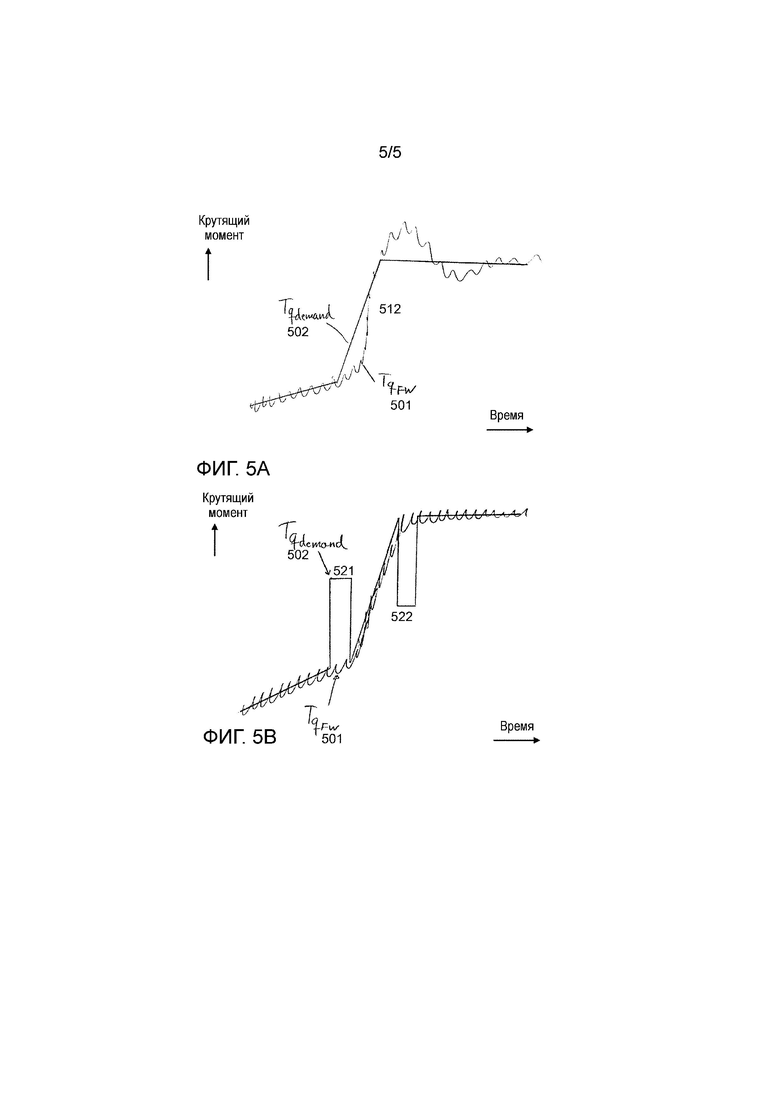
Фиг. 5a-5b показывают режим движения, в котором применены регулировки известного уровня техники, и в котором применена регулировка согласно настоящему изобретению, соответственно.
Описание предпочтительных вариантов выполнения изобретения
Фиг. 1 схематически показывает примерное большегрузное транспортное средство 100, такое как, грузовик, автобус и т.п., которое будет использовано для объяснения настоящего изобретения. Однако настоящее изобретение не ограничено использованием в большегрузных транспортных средствах и также может быть использовано в легковых транспортных средствах, таких как, легковые автомобили. Транспортное средство 100, схематически показанное на Фиг. 1, содержит пару ведущих колес 110, 111. Кроме того, транспортное средство содержит силовую передачу с двигателем 101, который может, например, представлять собой двигатель внутреннего сгорания, электрический двигатель или их сочетание, так называемый гибридный двигатель. Двигатель 101 может быть соединен с коробкой 103 передач, например, традиционным образом через выходной вал 102 двигателя 101, возможно, через сцепление 106 и входной вал 109, соединенный с коробкой 103 передач. Выходной вал 107 из коробки передач 103, также известный как карданный вал, приводит в движение ведущие колеса 110, 111 через редуктор 108, такой как, например, традиционный дифференциал, и приводные валы 104, 105, соединенные с указанным редуктором 108. Устройство 120 регулировки схематически проиллюстрировано, как обеспечивающее сигналы регулировки двигателю 101. Как описано ниже, устройство регулировки может содержать первое 121 и второе 122 определяющие устройства и устройство 123 регулировки крутящего момента. Эти устройства описаны более подробно ниже.
Когда водитель моторного транспортного средства 100 увеличивает запрос крутящего момента для двигателя 101, например, путем ввода через средства ввода, например, посредством нажатия педали акселератора, это может приводить к относительно быстрому изменению крутящего момента силовой передачи. Этому крутящему моменту сопротивляются ведущие колеса 110, 111 из-за их трения о землю и сопротивления качению моторного транспортного средства. Приводные валы 104, 105, таким образом, подвержены воздействию относительно мощного крутящего момента.
Среди прочего из соображений стоимости и веса приводные валы 104, 105 обычно не имеют таких размеров, чтобы справляться с этим существенным напряжением без влияния на них. Другими словами, приводные валы 104, 105 имеют относительно большую податливость при кручении. Карданный вал 107 также может иметь относительно большую податливость при кручении. Другие компоненты приводного вала также могут иметь определенную форму податливости при кручении. Вследствие относительной податливости при кручении приводных валов 104, 105, они действуют как пружины кручения между приводными валами 110, 111 и редуктором 108. Таким же образом, другие податливости при кручении в силовой передаче также действуют как пружины кручения между местоположением различных компонентов и ведущих колес 110, 111. Когда сопротивлению качению транспортного средства больше не удается сдерживать крутящий момент от силовой передачи, моторное транспортное средство 100 начинает катиться, в результате чего будет высвобождаться сила приводных валов 104, 105, действующих как пружина кручения. Когда моторное транспортное средство 100 начинает движение, эта высвобожденная сила может вызывать колебания силовой передачи, то есть моторное транспортное средство начинает качаться в продольном направлении, т.е. в направлении движения. Водитель моторного транспортного средства воспринимает такое качание, как причиняющее неудобство. Водитель предпочитает мягкое и комфортное восприятие движение, и если такое комфортное восприятие движение достигается, это создает впечатление, что моторное транспортное средство является качественным продуктом высокого технического уровня. В связи с этим доставляющие неудобство колебания силовой передачи следует по возможности исключить.
Настоящее изобретение относится к регулировке изменения производной по времени крутящего момента , запрашиваемого от двигателя 101. Двигатель 101 обеспечивает динамический крутящий момент в ответ на крутящий момент , запрашиваемый от двигателя 101, причем этот динамический крутящий момент представляет собой крутящий момент на маховике, соединяющем двигатель 101 с его выходным валом 102. Этот динамический крутящий момент представляет собой крутящий момент , который через передаточное отношение  силовой передачи, соотносится с динамическим крутящим моментом колес
силовой передачи, соотносится с динамическим крутящим моментом колес  , подаваемым на ведущие колеса 110, 111 транспортного средства. Передаточное отношение здесь представляет собой общее передаточное отношение силовой передачи, содержащее, например, передаточное отношение коробки передач для конкретной передачи. Другими словами, запрашиваемый крутящий момент двигателя приводит к динамическому крутящему моменту колес на ведущих колесах 110, 111 транспортного средства.
, подаваемым на ведущие колеса 110, 111 транспортного средства. Передаточное отношение здесь представляет собой общее передаточное отношение силовой передачи, содержащее, например, передаточное отношение коробки передач для конкретной передачи. Другими словами, запрашиваемый крутящий момент двигателя приводит к динамическому крутящему моменту колес на ведущих колесах 110, 111 транспортного средства.
Таким образом, настоящее изобретение относится к регулировке изменения производной по времени динамического крутящего момента, который подается на выходной вал от двигателя транспортного средства.
Согласно настоящему изобретению требуемое изменение производной по времени определяется для динамического крутящего момента, причем изменение происходит с текущего значения  на новое требуемое значение динамического крутящего момента.
на новое требуемое значение динамического крутящего момента.
Текущая разность скоростей вращения устанавливается между первым концом силовой передачи транспортного средства, вращающимся с первой скоростью вращения, и вторым концом силовой передачи, вращающимся со второй скоростью  вращения.
вращения.
Первая скорость вращения далее регулируется на основании требуемого значения производной по времени динамического крутящего момента, на основании коэффициента жесткости, связанного с податливостью при кручении силовой передачи, и на основании определенной текущей разности скоростей вращения.
Посредством регулировки первой скорости вращения текущее значение производной по времени динамического крутящего момента также косвенно регулируется в направлении требуемого значения .
Регулировка первой скорости вращения, которая также обеспечивает косвенную регулировку изменения производной по времени динамического крутящего момента, может выполняться системой, выполненной с возможностью регулировки изменения  производной по времени динамического крутящего момента, который подается на выходной вал от двигателя транспортного средства.
производной по времени динамического крутящего момента, который подается на выходной вал от двигателя транспортного средства.
Система согласно настоящему изобретению содержит первое определяющее устройство 121, которое выполнено с возможностью определения требуемого изменения производной по времени динамического крутящего момента, причем изменение происходит с текущего значения на новое требуемое значение динамического крутящего момента.
Система также содержит второе определяющее устройство 122, которое выполнено с возможностью определения текущей разности скоростей вращения между первым концом силовой передачи транспортного средства, вращающимся с первой скоростью вращения, и вторым концом силовой передачи, вращающимся со второй скоростью вращения.
Система также содержит устройство 123 регулировки крутящего момента, которое выполнено с возможностью регулировки первой скорости вращения, на основании требуемого значения производной по времени динамического крутящего момента, на основании коэффициента жесткости, связанного с податливостью при кручении силовой передачи, и на основании определенной текущей разности скоростей вращения.
В дополнение изобретение относится к моторному транспортному средству 100, например, легковому автомобилю, грузовику или автобусу, содержащему по меньшей мере систему регулировки производной по времени динамического крутящего момента согласно настоящему изобретению.
Фиг. 2 показывает блок-схему способа регулировки изменения производной по времени динамического крутящего момента согласно варианту выполнения настоящего изобретения.
На первом этапе 201 определяется требуемое изменение производной по времени динамического крутящего момента, например, посредством первого определяющего устройства 121, причем изменение состоит из разности между текущим значением и новым требуемым значением динамического крутящего момента.
На втором этапе 202, например, с использованием второго определяющего устройства 122, определяется текущая разность скоростей вращения между первым концом силовой передачи, вращающимся с первой скоростью вращения, и вторым концом силовой передачи, вращающимся со второй скоростью вращения.
На третьем этапе 203 регулируется первая скорость вращения, например, посредством устройства 123 регулировки крутящего момента, на основании требуемого значения производной по времени динамического крутящего момента, на основании коэффициента жесткости, связанного с податливостью при кручении силовой передачи, и на основании определенной текущей разности скоростей вращения. Посредством регулировки первой скорости вращения текущее значение производной по времени динамического крутящего момента также косвенно регулируется в направлении требуемого значения .
В связи с этим с использованием настоящего изобретения достигается изменение производной по времени динамического крутящего момента, которое может быть использовано для достижения быстрых изменений производной по времени динамического крутящего момента. Другими словами, требуемое направление/градиент графика, соответствующего производной по времени, может быть быстро достигнуто с использованием настоящего изобретения. Это направление/градиент, т.е. производная по времени, далее может быть использовано в качестве подходящих исходных значений для дальнейшей регулировки динамического крутящего момента .
Посредством настоящего изобретения быстрые изменения производной по времени динамического крутящего момента могут выполняться по существу мгновенно, то есть регулировка динамического крутящего момента может быть легко оптимизирована для повышения производительности транспортного средства и/или повышения комфорта водителя, путем достижения оптимизированного с точки зрения производительности значения запрашиваемого крутящего момента , который не будет приводить к качанию транспортного средства.
В известном уровне техники регулировался статический крутящий момент, что вызвало колебания силовой передачи транспортного средства. С использованием настоящего изобретения вместо этого может регулироваться динамический крутящий момент посредством быстрых изменений производной по времени, то есть колебания силовой передачи могут быть значительно уменьшены. Уменьшение колебаний силовой передачи повышает комфорт водителя транспортного средства. Другими словами, здесь регулируется физический крутящий момент, который является результатом впрыска топлива в двигатель и ответа силовой передачи вследствие ее характеристик, он представляет собой динамический крутящий момент . В связи с этим динамический крутящий момент соответствует крутящему моменту, который обеспечивается коробкой 103 передач, который также может быть выражен как крутящий момент, который обеспечивается маховиком силовой передачи, причем влияние силовой передачи, такое как ускорение двигателя и его влияние, содержится в пределах динамического крутящего момента . Таким образом, при использовании настоящего изобретения достигается физическая регулировка динамического крутящего момента .
Динамический крутящий момент может регулироваться, например, для достижения конкретных изменений крутящего момента, таких как замедление или ускорение после операций переключения передач в коробке 103 передач. Динамический крутящий момент также может регулироваться для достижения требуемых конкретных значений крутящего момента, что используется, например, для устройства круиз-контроля, т.е. использования устройства круиз-контроля для управления скоростью транспортного средства, или для управления движением педалями, т.е. ручного управления скоростью транспортного средства. Это может быть выражено в виде требуемых значений  и/или требуемых производных
и/или требуемых производных  динамического крутящего момента, которые возможно достичь посредством регулировки согласно настоящему изобретению.
динамического крутящего момента, которые возможно достичь посредством регулировки согласно настоящему изобретению.
В одном варианте выполнения динамический крутящий момент , подаваемый двигателем 101 на его выходной вал 102, может быть определен на основании задержанного запрашиваемого крутящего момента  двигателя, инерции
двигателя, инерции  вращения двигателя и ускорения
вращения двигателя и ускорения  вращения двигателя 101.
вращения двигателя 101.
Задержанный запрашиваемый крутящий момент двигателя задержан на период  времени, необходимый для выполнения впрыска топлива в двигатель 101, т.е. период времени, который проходит от начала впрыска до того момента, как топливо воспламеняется и сгорает. Этот период впрыска обычно известен, но его длительность варьируется, например, для различных двигателей и/или для различных скоростей двигателя. Динамический крутящий момент здесь может быть определен как разность между оценочными значениями задержанного запрашиваемого крутящего момента двигателя и значением
времени, необходимый для выполнения впрыска топлива в двигатель 101, т.е. период времени, который проходит от начала впрыска до того момента, как топливо воспламеняется и сгорает. Этот период впрыска обычно известен, но его длительность варьируется, например, для различных двигателей и/или для различных скоростей двигателя. Динамический крутящий момент здесь может быть определен как разность между оценочными значениями задержанного запрашиваемого крутящего момента двигателя и значением  крутящего момента, содержащим измеренные значения ускорения вращения двигателя. В связи с этим в одном варианте выполнения динамический крутящий момент может быть представлен сигнальной разностью между сигналом для оценочного задержанного запрашиваемого крутящего момента двигателя и сигналом крутящего момента, содержащим измеренные значения ускорения вращения двигателя.
крутящего момента, содержащим измеренные значения ускорения вращения двигателя. В связи с этим в одном варианте выполнения динамический крутящий момент может быть представлен сигнальной разностью между сигналом для оценочного задержанного запрашиваемого крутящего момента двигателя и сигналом крутящего момента, содержащим измеренные значения ускорения вращения двигателя.
Задержанный запрашиваемый крутящий момент двигателя может быть определен как эффективный крутящий момент, то есть потери и/или трения компенсируются, в результате чего достигаются запрашиваемый эффективный крутящий момент двигателя и задержанный запрашиваемый крутящий момент двигателя.
Таким образом, динамический крутящий момент , который подается двигателем 101 на его выходной вал 102, согласно одному варианту выполнения соответствует задержанному запрашиваемому крутящему моменту двигателя, уменьшенному на крутящий момент, соответствующий инерции вращения двигателя, умноженной на ускорение вращения двигателя 101, т.е.  , задержанный запрашиваемый крутящий момент двигателя задержан на время впрыска.
, задержанный запрашиваемый крутящий момент двигателя задержан на время впрыска.
Ускорение вращения двигателя 101 здесь может быть измерено путем создания производной по времени скорости  двигателя. Ускорение вращения далее пересчитывается на крутящий момент в соответствии со вторым законом Ньютона путем умножения на крутящий момент инерции вращения двигателя 101; .
двигателя. Ускорение вращения далее пересчитывается на крутящий момент в соответствии со вторым законом Ньютона путем умножения на крутящий момент инерции вращения двигателя 101; .
Согласно другому варианту выполнения динамический крутящий момент , обеспечиваемый двигателем 101, также может быть определен с использованием датчика крутящего момента, размещенного в подходящем произвольном положении вдоль силовой передачи транспортного средства. Таким образом, значение крутящего момента, измеренное таким датчиком, также может быть использовано в обратной связи согласно настоящему изобретению. Такой измеренный крутящий момент, который получен посредством датчика крутящего момента после маховика, т.е. где-либо между маховиком и ведущими колесами, соответствует физическому крутящему моменту, которому содействует динамический крутящий момент двигателя . Если посредством использования такого датчика крутящего момента может быть получен хороший отчет о крутящем моменте, датчик крутящего момента в связи с этим должен обеспечивать сигнал крутящего момента, соответствующий динамическому крутящему моменту .
Как проиллюстрировано на Фиг. 1, разные части силовой передачи имеют разные инерции вращения, содержащие инерцию вращения двигателя 101, инерцию  вращения коробки 130 передач, инерцию
вращения коробки 130 передач, инерцию  вращения сцепления 106, инерцию
вращения сцепления 106, инерцию  вращения карданного вала и инерции
вращения карданного вала и инерции  вращения каждого приводного вала 104, 105. В общем говоря, все вращающиеся тела имеют инерцию
вращения каждого приводного вала 104, 105. В общем говоря, все вращающиеся тела имеют инерцию  вращения, которая зависит от массы тела и расстояния массы от центра вращения. В целях ясности на Фиг. 1 добавлены только вышеуказанные инерции вращения, и их значение для настоящего изобретения будет описано ниже. Однако специалисту в области техники будет понятно, что в силовой передаче может возникать больше моментов инерции, чем здесь перечислено.
вращения, которая зависит от массы тела и расстояния массы от центра вращения. В целях ясности на Фиг. 1 добавлены только вышеуказанные инерции вращения, и их значение для настоящего изобретения будет описано ниже. Однако специалисту в области техники будет понятно, что в силовой передаче может возникать больше моментов инерции, чем здесь перечислено.
Согласно одному варианту выполнения настоящего изобретения сделано допущение, что инерция вращения двигателя 101 значительно больше других инерций вращения в силовой передаче, и что инерция вращения двигателя 101 в связи с этим преобладает в общей инерции вращения силовой передачи. То есть  , но так как
, но так как  ,
,  ,
,  ,
,  общая инерция вращения силовой передачи приблизительно равна инерции вращения двигателя 101;
общая инерция вращения силовой передачи приблизительно равна инерции вращения двигателя 101;  . Может быть приведен неограничивающий пример значений этих инерций вращения:
. Может быть приведен неограничивающий пример значений этих инерций вращения:  кг×м2,
кг×м2,  кг×м2,
кг×м2,  кг×м2,
кг×м2,  кг×м2,
кг×м2,  кг×м2, то есть допущение о том, что инерция вращения двигателя 101 преобладает в общей инерции вращения силовой передачи; ; является верным, так как другие части силовой передачи намного легче вращаются по сравнению с двигателем 101. Вышеуказанные примерные значения представляют собой значения на коробке передач со стороны двигателя, то есть они будут изменяться вдоль силовой передачи в зависимости от используемого передаточного отношения. Независимо от того, какое передаточное отношение используется, инерция вращения двигателя 101 значительно больше других инерций вращения, и в связи с этим преобладает в общей инерции вращения силовой передачи.
кг×м2, то есть допущение о том, что инерция вращения двигателя 101 преобладает в общей инерции вращения силовой передачи; ; является верным, так как другие части силовой передачи намного легче вращаются по сравнению с двигателем 101. Вышеуказанные примерные значения представляют собой значения на коробке передач со стороны двигателя, то есть они будут изменяться вдоль силовой передачи в зависимости от используемого передаточного отношения. Независимо от того, какое передаточное отношение используется, инерция вращения двигателя 101 значительно больше других инерций вращения, и в связи с этим преобладает в общей инерции вращения силовой передачи.
Поскольку инерция вращения двигателя преобладает в общей инерции вращения силовой передачи; ; динамический крутящий момент колес соответствует динамическому крутящему моменту , обеспечиваемому двигателем, умноженному на передаточное отношение ,  для силовой передачи. Это значительно упрощает регулировку запрашиваемого крутящего момента согласно настоящему изобретению, так как в связи с этим очень просто определить динамический крутящий момент на колесах. Таким образом, регулировка запрашиваемого крутящего момента согласно настоящему изобретению может непрерывно адаптироваться к динамическому крутящему моменту , подаваемому на колеса, то есть колебания силовой передачи могут быть значительно уменьшены или даже полностью исключены. Крутящий момент двигателя далее может запрашиваться таким образом, что требуемый динамический крутящий момент непрерывно подается на колеса, то есть достигается равномерный профиль крутящего момента для динамического крутящего момента колес, и колебания не возникают в профиле крутящего момента колес, или они имеют значительно меньшую амплитуду, чем при регулировке запрашиваемого крутящего момента двигателя известного уровня техники .
для силовой передачи. Это значительно упрощает регулировку запрашиваемого крутящего момента согласно настоящему изобретению, так как в связи с этим очень просто определить динамический крутящий момент на колесах. Таким образом, регулировка запрашиваемого крутящего момента согласно настоящему изобретению может непрерывно адаптироваться к динамическому крутящему моменту , подаваемому на колеса, то есть колебания силовой передачи могут быть значительно уменьшены или даже полностью исключены. Крутящий момент двигателя далее может запрашиваться таким образом, что требуемый динамический крутящий момент непрерывно подается на колеса, то есть достигается равномерный профиль крутящего момента для динамического крутящего момента колес, и колебания не возникают в профиле крутящего момента колес, или они имеют значительно меньшую амплитуду, чем при регулировке запрашиваемого крутящего момента двигателя известного уровня техники .
Силовая передача может быть аппроксимирована как относительно слабая пружина, которая может быть описана в виде:

где:
 представляет собой угол выходного вала 102 двигателя, т.е. общее увеличение производительности двигателя с момента запуска. Например, угол 1000 оборотов, который соответствует 1000*2
представляет собой угол выходного вала 102 двигателя, т.е. общее увеличение производительности двигателя с момента запуска. Например, угол 1000 оборотов, который соответствует 1000*2 радиан, если двигатель работает в течение минуты на скорости 1000 об/мин;
радиан, если двигатель работает в течение минуты на скорости 1000 об/мин;
представляет собой производную по времени от , т.е. скорость вращения вала 102;
 представляет собой угол для одного или более ведущих колес 110, 111, т.е. общее увеличение производительности колес с момента запуска;
представляет собой угол для одного или более ведущих колес 110, 111, т.е. общее увеличение производительности колес с момента запуска;
 представляет собой производную по времени от , т.е. скорость вращения колес;
представляет собой производную по времени от , т.е. скорость вращения колес;
представляет собой коэффициент жесткости, который связан с крутящим моментом, требуемым для подъема пружины для достижения определенного градиента, например, для получения определенной разности  между и . Малое значение коэффициента жесткости соответствует слабой и колеблющейся пружине/силовой передаче;
между и . Малое значение коэффициента жесткости соответствует слабой и колеблющейся пружине/силовой передаче;
 представляет собой коэффициент демпфирования пружины.
представляет собой коэффициент демпфирования пружины.
Дифференцирование формулы 1 дает:

Разумно предположить, что силовая передача часто может рассматриваться как недемпфированная пружина, т.е. что  , и что в коэффициенте жесткости преобладает коэффициент
, и что в коэффициенте жесткости преобладает коэффициент  жесткости приводных валов 104, 105, т.е.
жесткости приводных валов 104, 105, т.е.  , где представляет собой передаточное отношение. Если , то формула 2 упрощается:
, где представляет собой передаточное отношение. Если , то формула 2 упрощается:

Как указано в формуле 3, производные, которые представляют собой градиент, динамического крутящего момента могут рассматриваться как пропорциональные разности  между скоростью вращения колес 110, 111 и скоростью вращения двигателя/вала 102.
между скоростью вращения колес 110, 111 и скоростью вращения двигателя/вала 102.
Это также значит, что требуемое изменение крутящего момента, которое представляет собой крутящий момент с градиентом и в связи с этим изменяет значение с течением времени, может быть получено введением разности между скоростью вращения колес 110, 111 и скоростью вращения двигателя/вала 102;  :
:
где  представляет собой опорную скорость вращения, запрашиваемую от двигателя 101 для достижения изменения крутящего момента.
представляет собой опорную скорость вращения, запрашиваемую от двигателя 101 для достижения изменения крутящего момента.
Разность в скорости вращения выше в формулах 1-4, была описана как разность между скоростями вращения колес 110, 111 и скоростью вращения двигателя/вала 102. Однако следует понимать, что разность в более в общем смысле может быть описана как разность скорости вращения между первым концом силовой передачи, вращающимся с первой скоростью вращения, и вторым концом силовой передачи, вращающимся на второй скорости вращения;  , причем первый конец, например, может быть частью двигателя 101 или выходного вала 102 двигателя, а второй конец, например, может представлять собой ведущие колеса 110, 111 или приводные валы 104, 105. Как отмечено выше, производная по времени/градиент динамического крутящего момента пропорциональна текущей разности скоростей вращения между первой скоростью вращения и второй скоростью вращения.
, причем первый конец, например, может быть частью двигателя 101 или выходного вала 102 двигателя, а второй конец, например, может представлять собой ведущие колеса 110, 111 или приводные валы 104, 105. Как отмечено выше, производная по времени/градиент динамического крутящего момента пропорциональна текущей разности скоростей вращения между первой скоростью вращения и второй скоростью вращения.
Как описано выше, первая скорость вращения согласно настоящему изобретению регулируется на основании среди прочего коэффициента жесткости. Коэффициент жесткости связан с податливостью при кручении силовой передачи. Во многих случаях в коэффициенте жесткости преобладает коэффициент жесткости приводных валов 104, 105, связанный с передаточным отношением силовой передачи, то есть  , где представляет собой передаточное отношение.
, где представляет собой передаточное отношение.
В других случаях, для которых в коэффициенте жесткости не преобладает коэффициент жесткости приводных валов 104, 105, или в которых действительное значение коэффициента жесткости имеет важное значение и не может быть аппроксимировано, определяется общий коэффициент  жесткости силовой передачи, который содержит податливости при кручении для по существу всех компонентов силовой передачи.
жесткости силовой передачи, который содержит податливости при кручении для по существу всех компонентов силовой передачи.
Коэффициент жесткости может быть определен на основании понимания того, что компоненты включены в силовую передачу, и податливостей при кручении включенных компонентов, и того, как сконфигурированы компоненты силовой передачи. Так как конфигурация компонентов и их связь с коэффициентом жесткости известны из измерений, выполненных при проектировании и/или установке силовой передачи, возможно определение коэффициента жесткости.
Коэффициент жесткости также может быть определен посредством адаптивной оценки при движении транспортного средства. Таким образом, эта оценка может осуществляться по меньшей мере частично непрерывно во время подходящих участков движения. Оценка основана на разности между скоростью вращения колес 110, 111 и скоростью вращения двигателя/вала 102 при изменении крутящего момента и на градиенте изменения крутящего момента путем определения отношения между производной динамического крутящего момента и разности ;  . Например, коэффициент жесткости для производной 3000 Н×м/с и разности скоростей вращения 100 об/мин, таким образом, составляет
. Например, коэффициент жесткости для производной 3000 Н×м/с и разности скоростей вращения 100 об/мин, таким образом, составляет  Nm/row. Оценки предпочтительно могут быть выполнены более одного раза, и затем определяется среднее значение результатов.
Nm/row. Оценки предпочтительно могут быть выполнены более одного раза, и затем определяется среднее значение результатов.
Согласно одному варианту выполнения настоящего изобретения устройство 123 регулировки крутящего момента выполнено с возможностью запроса крутящего момента от двигателя 101, причем по меньшей мере одно существенное изменение  запрашиваемого крутящего момента может быть использовано для достижения требуемого изменения производной по времени динамического крутящего момента. Другими словами, устройство 123 регулировки крутящего момента здесь может косвенно регулировать первую скорость вращения, которая, например, может представлять собой скорость вращения двигателя, путем регулировки запрашиваемого крутящего момента .
запрашиваемого крутящего момента может быть использовано для достижения требуемого изменения производной по времени динамического крутящего момента. Другими словами, устройство 123 регулировки крутящего момента здесь может косвенно регулировать первую скорость вращения, которая, например, может представлять собой скорость вращения двигателя, путем регулировки запрашиваемого крутящего момента .
Существенное изменение крутящего момента, запрашиваемого от двигателя, в настоящем документе следует понимать как изменение крутящего момента на величину, находящуюся в интервале, соответствующем 10%-100% от общего доступного крутящего момента двигателя, причем это изменение происходит во время периода вычисления устройства регулировки, которое выполняет регулировку. Длительность этого периода вычисления может, например, зависеть от тактовой частоты процессора в устройстве регулировки. Устройства регулировки часто определяют обновленные параметры регулировки/значения регулировки с заданной частотой, т.е. определенным временным интервалом, причем длительность периода вычисления может соответствовать такому периоду времени, иногда также называемому «такт» системы регулировки.
По меньшей мере одно существенное изменение запрашиваемого крутящего момента, которое заключается в обеспечении изменения производной по времени, должно продолжаться в течение периода  времени, который не длительнее, чем один период времени впрыска, требуемый для впрыска топлива в двигатель 101 системой впрыска и воспламенения;
времени, который не длительнее, чем один период времени впрыска, требуемый для впрыска топлива в двигатель 101 системой впрыска и воспламенения;  . Таким образом, гарантируется, что может быть выполнено несколько впрысков топлива, что является условием осуществления по меньшей мере одного существенного изменения . В связи с этим запрашиваемый крутящий момент здесь должен быть изменен с первого значения
. Таким образом, гарантируется, что может быть выполнено несколько впрысков топлива, что является условием осуществления по меньшей мере одного существенного изменения . В связи с этим запрашиваемый крутящий момент здесь должен быть изменен с первого значения  на второе значение
на второе значение  ;
;  ; и далее сохранять это второе значение в течение более длительного периода времени, чем период времени впрыска. Таким образом, когда по меньшей мере одно существенное изменение соответствует одному или более пикам/скачкам запрашиваемого крутящего момента , эти пики/скачки должны продолжаться в течение более длительного периода времени, чем период времени впрыска, для того, чтобы с определенностью обеспечивать требуемую регулировку.
; и далее сохранять это второе значение в течение более длительного периода времени, чем период времени впрыска. Таким образом, когда по меньшей мере одно существенное изменение соответствует одному или более пикам/скачкам запрашиваемого крутящего момента , эти пики/скачки должны продолжаться в течение более длительного периода времени, чем период времени впрыска, для того, чтобы с определенностью обеспечивать требуемую регулировку.
Испытания показали, что силовая передача транспортного средства имеет собственное колебание, которое зависит от компонентов, которые являются частью силовой передачи, и конфигурации/состава этих компонентов. Это собственное колебание имеет определенную собственную частоту  , которая соответствует периоду
, которая соответствует периоду  времени собственного колебания. Согласно одному варианту выполнения настоящего изобретения понимание и знание собственных колебаний силовой передачи используется для определения периода времени, в течение которого продолжается по меньшей мере одно существенное изменение крутящего момента, запрашиваемого от двигателя. Это существенное изменение крутящего момента, запрашиваемого от двигателя, здесь должно продолжаться в течение периода времени, который длительнее одного периода впрыска и короче, чем часть
времени собственного колебания. Согласно одному варианту выполнения настоящего изобретения понимание и знание собственных колебаний силовой передачи используется для определения периода времени, в течение которого продолжается по меньшей мере одно существенное изменение крутящего момента, запрашиваемого от двигателя. Это существенное изменение крутящего момента, запрашиваемого от двигателя, здесь должно продолжаться в течение периода времени, который длительнее одного периода впрыска и короче, чем часть  циклической продолжительности собственных колебаний силовой передачи
циклической продолжительности собственных колебаний силовой передачи  . В связи с этим запрашиваемый крутящий момент здесь должен быть изменен с первого значения на второе значение ; ; и далее сохранять это второе значение в течение более короткого периода времени, чем часть циклической продолжительности .
. В связи с этим запрашиваемый крутящий момент здесь должен быть изменен с первого значения на второе значение ; ; и далее сохранять это второе значение в течение более короткого периода времени, чем часть циклической продолжительности .
Если эта часть выбрана соответствующим образом, то по меньшей мере одно существенное изменение запрашиваемого крутящего момента может происходить во время по существу линейной части собственного колебания. Например, эта часть может быть одной восьмой  ;
;  ; в результате чего, велика вероятность того, что по меньшей мере одно существенное изменение возникает во время части циклический продолжительности , причем синусоидальное собственное колебание имеет относительно прямолинейную/неизогнутую форму.
; в результате чего, велика вероятность того, что по меньшей мере одно существенное изменение возникает во время части циклический продолжительности , причем синусоидальное собственное колебание имеет относительно прямолинейную/неизогнутую форму.
В общем можно сказать, что регулировки будут более точными при использовании более короткой части циклической продолжительности , то есть, для больших значений  , так как более линейная часть собственного колебания далее используется для регулировки. Однако эта часть циклической продолжительности не может быть бесконечно короче, так как разность амплитуд запрашиваемого крутящего момента, которая требуется для достижения изменения производной по времени, увеличивается по мере укорачивания части циклической продолжительности , и так как имеются ограничения того, насколько короткой может быть эта разность амплитуд
, так как более линейная часть собственного колебания далее используется для регулировки. Однако эта часть циклической продолжительности не может быть бесконечно короче, так как разность амплитуд запрашиваемого крутящего момента, которая требуется для достижения изменения производной по времени, увеличивается по мере укорачивания части циклической продолжительности , и так как имеются ограничения того, насколько короткой может быть эта разность амплитуд  .
.
Согласно одному варианту выполнения величина изменения производной по времени связана с величиной существенного изменения , т.е. разностью амплитуд, крутящего момента, запрашиваемого от двигателя, и временем  , которое необходимо для осуществления изменения . производной по времени.
, которое необходимо для осуществления изменения . производной по времени.
Это может рассматриваться, как если площадь  поверхности, ограниченная изменением крутящего момента, запрашиваемого двигателем, и временем , которое необходимо для осуществления изменения ;
поверхности, ограниченная изменением крутящего момента, запрашиваемого двигателем, и временем , которое необходимо для осуществления изменения ;  ; требуется для изменения производной по времени динамического крутящего момента.
; требуется для изменения производной по времени динамического крутящего момента.
В связи с этим в общем соответствующее изменение производной по времени динамического крутящего момента может быть достигнуто с помощью большего изменения запрашиваемого крутящего момента в течение более короткого периода времени , чем может быть достигнуто с помощью меньшего изменения запрашиваемого крутящего момента в течение более длительного периода времени , если площадь поверхностей, которые ограничивают эти изменения, имеет одинаковый размер.
Время , которое необходимо для изменения производной по времени динамического крутящего момента, зависит от времени , которое необходимо для осуществления существенного изменения крутящего момента, запрашиваемого от двигателя. Так как имеются ограничения того, насколько может быть большая разность амплитуды/изменение запрашиваемого крутящего момента , и так как определенное изменение динамического крутящего момента требует определенной площади , ограничения разности амплитуд/изменения запрашиваемого крутящего момента иногда будут означать, что время , которое необходимо для осуществления существенного изменения , продляется, что также означает, что время, , которое необходимо для изменения производной по времени, также продляется.
Регулировка согласно настоящему изобретению может происходить в направлении требуемого градиента/изменения/производной динамического крутящего момента. Требуемая производная динамического крутящего момента может быть связана с режимом движения, используемым транспортным средством. Для транспортных средств определено несколько таких режимов движения, например, экономичный режим движения (ECO), мощный режим движения (POWER) и нормальный режим движения (NORMAL). Режимы движения определяют, например, насколько агрессивным будет поведение транспортного средства, и какие ощущения будет вызывать транспортное средство при движении, причем эта агрессивность связана с производной динамического крутящего момента.
Требуемая производная динамического крутящего момента может быть связана с калибровкой по меньшей мере одного параметра, который связан с риском рывков силовой передачи. Например, максимальное значение  требуемой производной может быть откалибровано на значение, компенсирующее рывки силовой передачи при возникновении относительно больших изменений требуемого крутящего момента, например, при относительно быстром нажатии и отпускании педали акселератора.
требуемой производной может быть откалибровано на значение, компенсирующее рывки силовой передачи при возникновении относительно больших изменений требуемого крутящего момента, например, при относительно быстром нажатии и отпускании педали акселератора.
Требуемая производная динамического крутящего момента может быть связана и может обеспечивать замедление или ускорение до операции переключения передачи в коробке 103 передач или ускорение или замедление после операции переключения передачи в коробке передач.
Требуемая производная динамического крутящего момента может быть связана и может обеспечивать замедление до освобождения сцепления 106 или ускорение после зацепления сцепления 106.
Специалисту в области техники будет понятно, что способ изменения производной по времени динамического крутящего момента согласно настоящему изобретению также может быть осуществлен компьютерной программой, которая при выполнении компьютером будет побуждать компьютер выполнять способ. Компьютерная программа обычно состоит из части компьютерного программного продукта 303, причем компьютерный программный продукт содержит подходящий цифровой носитель данных, на котором сохранена компьютерная программа. Указанный машиночитаемый носитель состоит из подходящей памяти, например: ROM (постоянная память), PROM (программируемая постоянная память), EPROM (стираемая PROM), флеш-память, EEPROM (электрически стираемая PROM), жесткий диск и т.д.
Фиг. 3 схематически показывает устройство 300 регулировки. Устройство 300 регулировки содержит вычислительный блок 301, который может состоять по существу из подходящего типа процессора или микрокомпьютера, например, схемы для обработки цифровых сигналов (цифровой сигнальный процессор, DSP) или схемы с заданной конкретной функцией (интегральная схема специального назначения, ASIC). Вычислительный блок 301 соединен с блоком 302 памяти, установленным в устройстве 300 регулировки, обеспечивающим, например, сохраненный программный код и/или сохраненные данные вычислительному устройству 301, которые необходимы вычислительному устройству 301 для выполнения вычислений. Вычислительный блок 301 также выполнен с возможностью сохранения промежуточных или конечных результатов вычисления в блоке 302 памяти.
Дополнительно устройство 300 регулировки оборудовано устройствами 311, 312, 313, 314 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать формы волны, импульсы или другие атрибуты, которые могут обнаруживаться устройствами 311, 313 приема входных сигналов в качестве информации и могут быть преобразованы в сигналы, которые могут быть обработаны вычислительным блоком 301. Эти сигналы далее поступают в вычислительный блок 301. Устройства 312, 314 для отправки выходных сигналов выполнены с возможностью преобразования результата вычисления от вычислительного устройства 301 в выходные сигналы для передачи другим частям системы регулировки и/или компоненту(ам) транспортного средства, для которых предназначены сигналы, например, двигателю.
Каждое из соединений с устройствами для приема и отправки входных и выходных сигналов может состоять из одного или нескольких элементов из кабеля; шины данных, такой как шина CAN (локальной сети контроллеров), шина MOST (передачи данных мультимедийных систем) или любая другая конфигурация шины; или беспроводного соединения.
Специалисту в области техники будет понятно, что вышеуказанный компьютер может состоять из вычислительного блока 301, и что вышеуказанная память может состоять из блока 302 памяти.
В общем системы регулировки в современных транспортных средствах состоят из системы шин связи, состоящей из одной или нескольких шин связи для соединения нескольких электронных устройств управления (ECU) или контроллеров и других компонентов, находящихся в транспортном средстве. Такая система регулировки может содержать большое количество устройств регулировки, и ответственность за определенную функцию может быть распределена между более чем одним устройством регулировки. Таким образом, транспортные средства, относящиеся к показанному типу, часто содержат значительно большее количество устройств регулировки, чем показано на Фиг. 1 и 3, что хорошо известно специалисту в области техники в пределах технологической области.
Настоящее изобретение в показанном варианте выполнения осуществлено в устройстве 300 регулировки. Однако изобретение также может быть осуществлено полностью или частично в одном или нескольких других устройствах регулировки, уже имеющихся в транспортном средстве, или в устройстве регулировки, предназначенном для настоящего изобретения.
Фиг. 4a-b показывают схематическую структурную схему системы впрыска топлива известного уровня техники (Фиг. 4a) и системы впрыска топлива, содержащей систему регулировки согласно настоящему изобретению (Фиг. 4b).
Для определения того, сколько топлива следует впрыскивать в двигатель, в течение длительного времени в транспортных средствах использовалась информация/показания о запрашиваемом крутящем моменте, такие как, например, сигналы и/или механические показания, например, от управляемой водителем педали акселератора, системы круиз-контроля и/или системы переключения передач. Количество топлива, которое должно быть впрыснуто в двигатель, далее вычисляется на основании информации/показаний. Другими словами, выполняется прямая переинтерпретация/преобразование информации/показания в соответствующее количество топлива. Далее это топливо впрыскивается в цилиндры двигателя для работы двигателя. Эта процедура известного уровня техники схематически показана на Фиг. 4a. Таким образом, с использованием известного уровня техники принимается и используется прямая передача информации/показания, например, от педали акселератора на статический крутящий момент, получаемый путем впрыска топлива. Другими словами, например, показание от педали акселератора 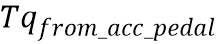 , здесь непосредственно используется для вычисления запрашиваемого крутящего момента ;
, здесь непосредственно используется для вычисления запрашиваемого крутящего момента ;  .
.
При использовании настоящего изобретения в системе впрыска топлива вводится регулятор/система регулировки, как проиллюстрировано на Фиг. 4b, т.е. система согласно настоящему изобретению, которая выполнена с возможностью регулировки крутящего момента запрашиваемого от двигателя транспортного средства, между педалью акселератора, системой круиз-контроля и/или системой переключения передач, и преобразования крутящего момента в количество топлива. Таким образом, регулятор/система регулировки, который получает запрашиваемое/требуемое поведение/профиль динамического крутящего момента, содержится в этой системе согласно настоящему изобретению. Таким образом, этот динамический крутящий момент вычисляется/преобразуется в количество топлива, впрыскиваемого в двигатель при сгорании. Другими словами, показание от педали акселератора здесь сначала преобразуется в запрос крутящего момента для динамического крутящего момента, например, путем использования формулы с показанием от педали акселератора , введенным в формулу:  , затем количество топлива, соответствующее этому запросу крутящего момента , впрыскивается в двигатель. Здесь
, затем количество топлива, соответствующее этому запросу крутящего момента , впрыскивается в двигатель. Здесь  представляет собой текущее значение динамического крутящего момента. Общее время
представляет собой текущее значение динамического крутящего момента. Общее время  задержки соответствует времени, которое проходит от определения по меньшей мере одного значения параметра до выполнения изменения динамического крутящего момента , основанного на по меньшей мере одном определенном значении параметра. Калибровочный параметр
задержки соответствует времени, которое проходит от определения по меньшей мере одного значения параметра до выполнения изменения динамического крутящего момента , основанного на по меньшей мере одном определенном значении параметра. Калибровочный параметр  связан с установкой периода для системы регулировки/регулятора и имеет временное измерение. Калибровочный параметр может быть установлен на меньшее значение, если требуется более быстрая установка, и большее значение, если требуется более медленная установка.
связан с установкой периода для системы регулировки/регулятора и имеет временное измерение. Калибровочный параметр может быть установлен на меньшее значение, если требуется более быстрая установка, и большее значение, если требуется более медленная установка.
Также могут быть использованы другие формулы регулировки подобным образом, что будет понятно специалисту в области техники. Это значит, что текущий динамический крутящий момент согласно настоящему изобретению регулируется в направлении показания от педали акселератора . При использовании настоящего изобретения может быть использована педаль акселератора, система круиз-контроля, система переключения передач или другая возможная система, запрашивающая крутящий момент, для запроса и/или обеспечения динамического крутящего момента, а не статического крутящего момента, запрашиваемого в системе известного уровня техники (Фиг. 4a).
Фиг. 5a показывает регулировку согласно известному уровню техники, при которой запрос статического крутящего момента осуществляется для изменения крутящего момента двигателя для режима движения, который, например, может соответствовать увеличению/уменьшению крутящего момента 512 двигателя, т.е. ускорению, например, после операции переключения передачи, после чего крутящий момент должен оставаться по существу на том же уровне.
График 501 показывает динамический крутящий момент , который является результатом регулировки. График 502 показывает запрашиваемый крутящий момент . Из фиг. очевидно, что результирующий динамический крутящий момент 501 существенно колеблется, то есть имеет большую амплитуду, и при ускорении 512, и когда крутящий момент не изменяется в течение некоторого времени, что будет очень негативно восприниматься водителем и/или пассажирами транспортного средства.
Фиг. 5b показывает регулировку согласно варианту выполнения настоящего изобретения, при которой запрос динамического крутящего момента осуществляется для режима движения, соответствующего проиллюстрированному на Фиг. 5a. График 501 показывает динамический крутящий момент , который является результатом регулировки. График 502 показывает запрашиваемый крутящий момент . Согласно настоящему изобретению существенные изменения запрашиваемого крутящего момента допустимы в виде пиков, скачков или т.п. запрашиваемого крутящего момента , по сравнению с запросами крутящего момента согласно известному уровню техники. Эти существенные изменения здесь используются для достижения изменений производной по времени динамического крутящего момента, т.е. для того, чтобы «наклонить» градиент динамического крутящего момента 501. Посредством настоящего изобретения эти изменения производной по времени динамического крутящего момента 501 могут выполняться по существу мгновенно.
Примеры таких изменений производной по времени посредством существенных изменений запрашиваемого крутящего момента могут быть рассмотрены как первый 521 и второй 522 случаи на Фиг. 5b. В первом случае 521 динамический крутящий момент 501 наклонен вверх путем использования положительного пика запрашиваемого крутящего момента 502. Во втором случае 512 динамический крутящий момент 501 наклонен вниз на почти горизонтальный угол путем использования отрицательного пика .
С использованием настоящего изобретения запрашиваемый крутящий момент может достигать по меньшей мере частично относительно прерывистого и неравномерного профиля на Фиг. 5b. Это допустимо согласно настоящему изобретению, так как регулировка фокусируется на обеспечении динамического крутящего момента 501 с более равномерной и по существу неколеблющейся формой. Как очевидно из Фиг. 5, результат регулировки также заключается в том, что динамический крутящий момент 501 колеблется значительно меньше, т.е. он имеет значительно меньшую амплитуду, чем динамический крутящий момент 501 при регулировке известного уровня техники на Фиг. 5a. Таким образом, путем использования настоящего изобретения достигается больший комфорт, а также лучшая производительность, наряду с этим динамический крутящий момент 501 надежно регулируется в направлении требуемой производной.
В настоящем документе устройства часто описаны как выполненные с возможностью выполнения этапов способа согласно изобретению. Это также означает, что устройства приспособлены и/или настроены на выполнение этих этапов способа.
Настоящее изобретение не ограничивается описанными выше вариантами выполнения изобретения, но относится к и содержит все варианты выполнения в пределах защищенного объема независимых пунктов приложенной формулы изобретения.


Изобретение относится к регулировке крутящего момента двигателя внутреннего сгорания. Технический результат заключается в изменении крутящего момента при запросе крутящего момента двигателя так, что колебания силовой передачи уменьшаются или не возникают. Предложен способ регулировки изменения  производной по времени динамического крутящего момента, в котором определяется требуемое изменение производной по времени с текущего значения
производной по времени динамического крутящего момента, в котором определяется требуемое изменение производной по времени с текущего значения  на новое требуемое значение
на новое требуемое значение  . Определяется текущая разность
. Определяется текущая разность  скоростей вращения между первым концом силовой передачи транспортного средства, вращающимся с первой скоростью
скоростей вращения между первым концом силовой передачи транспортного средства, вращающимся с первой скоростью  вращения, и вторым концом силовой передачи, вращающимся со второй скоростью
вращения, и вторым концом силовой передачи, вращающимся со второй скоростью  вращения. Первая скорость вращения регулируется на основании требуемого значения производной по времени динамического крутящего момента, на основании коэффициента
вращения. Первая скорость вращения регулируется на основании требуемого значения производной по времени динамического крутящего момента, на основании коэффициента  жесткости, связанного с податливостью при кручении силовой передачи, и на основании определенной текущей разности скоростей вращения. Посредством регулировки первой скорости вращения текущее значение производной по времени динамического крутящего момента также косвенно регулируется в направлении требуемого значения . 3 н. и 24 з.п. ф-лы, 7 ил.
жесткости, связанного с податливостью при кручении силовой передачи, и на основании определенной текущей разности скоростей вращения. Посредством регулировки первой скорости вращения текущее значение производной по времени динамического крутящего момента также косвенно регулируется в направлении требуемого значения . 3 н. и 24 з.п. ф-лы, 7 ил.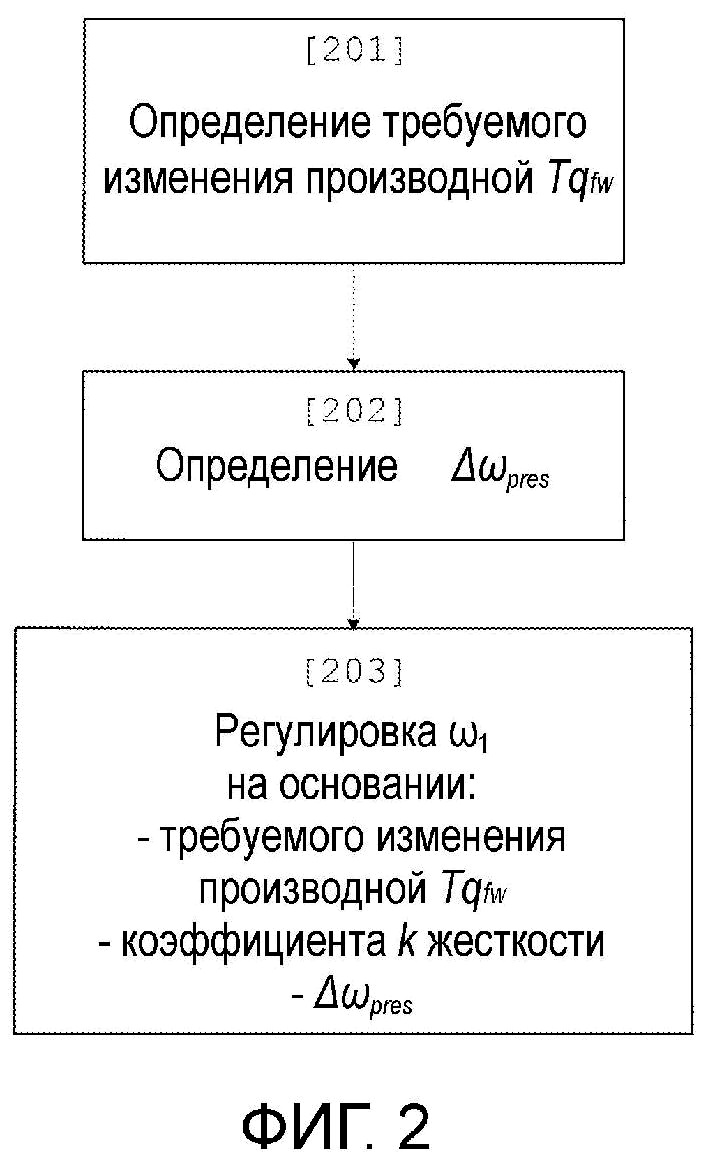
1. Система, выполненная с возможностью регулировки изменения производной по времени  динамического крутящего момента, который подается на выходной вал от двигателя (101) транспортного средства (100), отличающаяся тем, что содержит:
динамического крутящего момента, который подается на выходной вал от двигателя (101) транспортного средства (100), отличающаяся тем, что содержит:
первое определяющее устройство (121), выполненное с возможностью определения требуемого изменения указанной производной по времени динамического крутящего момента с текущего значения  на новое требуемое значение
на новое требуемое значение  ;
;
второе определяющее устройство (122), выполненное с возможностью определения текущей разности  между первым концом силовой передачи транспортного средства (100), вращающимся с первой скоростью
между первым концом силовой передачи транспортного средства (100), вращающимся с первой скоростью  вращения, и вторым концом силовой передачи, вращающимся со второй скоростью
вращения, и вторым концом силовой передачи, вращающимся со второй скоростью  вращения;
вращения;
устройство (123) регулировки крутящего момента, выполненное с возможностью выполнения регулировки первой скорости вращения, причем регулировка первой скорости вращения основана на указанном требуемом значении указанной производной по времени динамического крутящего момента, на коэффициенте  жесткости, связанном с податливостью при кручении силовой передачи, и на текущей скорости вращения,
жесткости, связанном с податливостью при кручении силовой передачи, и на текущей скорости вращения,
причем текущее значение производной по времени динамического крутящего момента косвенно регулируется в направлении требуемого значения посредством указанной регулировки первой скорости вращения.
2. Система по п. 1, отличающаяся тем, что первая скорость вращения соответствует скорости  вращения двигателя (101);
вращения двигателя (101);  .
.
3. Система по п. 1, отличающаяся тем, что вторая скорость вращения соответствует переданной скорости  вращения по меньшей мере одного ведущего колеса транспортного средства (100);
вращения по меньшей мере одного ведущего колеса транспортного средства (100);  .
.
4. Система по п. 1, отличающаяся тем, что коэффициент жесткости является одним из группы, состоящей из:
коэффициента  жесткости приводных валов (104, 105) транспортного средства (100), связанного с передаточным отношением
жесткости приводных валов (104, 105) транспортного средства (100), связанного с передаточным отношением  указанной силовой передачи, который преобладает в коэффициенте жесткости силовой передачи; и
указанной силовой передачи, который преобладает в коэффициенте жесткости силовой передачи; и
общего коэффициента  жесткости силовой передачи.
жесткости силовой передачи.
5. Система по п. 1, отличающаяся тем, что она содержит третье определяющее устройство, выполненное с возможностью определения коэффициента жесткости посредством одного или более из группы, состоящей из:
вычисления, основанного на конфигурации одного или более компонентов силовой передачи, причем отношение к коэффициенту жесткости известно для указанных одного или более компонентов; и
по меньшей мере частично непрерывной адаптивной оценки, которая оценивает коэффициент жесткости при движении транспортного средства (100).
6. Система по п. 1, отличающаяся тем, что устройство (123) регулировки крутящего момента выполнено с возможностью достижения изменения производной по времени динамического крутящего момента посредством по меньшей мере одного существенного изменения  крутящего момента, запрашиваемого от двигателя (101).
крутящего момента, запрашиваемого от двигателя (101).
7. Система по п. 6, отличающаяся тем, что устройство (123) регулировки крутящего момента выполнено с возможностью косвенной регулировки первой скорости вращения посредством регулировки запрашиваемого крутящего момента  .
.
8. Система по п. 6, отличающаяся тем, что каждое из указанного по меньшей мере одного существенного изменения имеет величину в пределах диапазона, соответствующего 10%-100% от общего доступного крутящего момента двигателя (101) в течение периода вычисления устройства регулировки, которое выполняет указанную регулировку.
9. Система по п. 6, отличающаяся тем, что каждое из указанного по меньшей мере одного существенного изменения крутящего момента, запрашиваемого от двигателя (101), продолжается в течение периода времени  , который длительнее, чем период
, который длительнее, чем период  впрыска, и короче, чем часть
впрыска, и короче, чем часть  циклической продолжительности
циклической продолжительности  собственного колебания силовой передачи;
собственного колебания силовой передачи;  .
.
10. Система по п. 6, отличающаяся тем, что величина изменения производной по времени зависит от величины существенного изменения крутящего момента, запрашиваемого от двигателя (101), и времени  , которое необходимо для выполнения изменения производной по времени.
, которое необходимо для выполнения изменения производной по времени.
11. Система по п. 6, отличающаяся тем, что время , необходимое для изменения указанной производной по времени, зависит от времени , необходимого для выполнения указанного существенного изменения крутящего момента, запрашиваемого от двигателя (101).
12. Система по п. 1, отличающаяся тем, что производная по времени динамического крутящего момента пропорциональна разности скоростей вращения.
13. Система по п. 1, отличающаяся тем, что устройство (123) регулировки крутящего момента выполнено с возможностью регулировки изменения производной по времени динамического крутящего момента таким образом, что достигаются по существу мгновенные изменения производной по времени.
14. Способ регулировки изменения производной по времени динамического крутящего момента, который подается на выходной вал от двигателя (101) транспортного средства (100), отличающийся тем, что:
определяют требуемое изменение производной по времени динамического крутящего момента с текущего значения на новое требуемое значение ;
определяют текущую разность скоростей вращения между первым концом силовой передачи транспортного средства (100), вращающимся с первой скоростью вращения, и вторым концом силовой передачи, вращающимся со второй скоростью вращения;
регулируют первую скорость вращения, причем регулировка первой скорости вращения основана на требуемом значении производной по времени динамического крутящего момента, на коэффициенте жесткости, связанном с податливостью при кручении силовой передачи, и на текущей скорости вращения,
причем текущее значение производной по времени динамического крутящего момента косвенно регулируют в направлении требуемого значения посредством регулировки первой скорости  вращения.
вращения.
15. Способ по п. 14, отличающийся тем, что первая скорость вращения соответствует скорости вращения двигателя (101) .
16. Способ по п. 14, отличающийся тем, что вторая скорость вращения соответствует переданной скорости  вращения по меньшей мере одного ведущего колеса транспортного средства (100) .
вращения по меньшей мере одного ведущего колеса транспортного средства (100) .
17. Способ по п. 14, отличающийся тем, что коэффициент жесткости является одним из группы, состоящей из:
коэффициента жесткости приводных валов (104, 105) транспортного средства (100), связанного с передаточным отношением силовой передачи, который преобладает в коэффициенте жесткости силовой передачи; и
общего коэффициента жесткости силовой передачи.
18. Способ по п. 14, отличающийся тем, что коэффициент жесткости определяют посредством одного или нескольких из группы, состоящей из:
вычисления, основанного на конфигурации одного или более компонентов силовой передачи, причем отношение к коэффициенту жесткости известно для указанных одного или более компонентов; и
по меньшей мере частично непрерывной адаптивной оценки, которая оценивает коэффициент жесткости при движении транспортного средства (100).
19. Способ по п. 14, отличающийся тем, что регулировка изменения производной по времени динамического крутящего момента достигается посредством по меньшей мере одного существенного изменения крутящего момента, запрашиваемого от двигателя (101).
20. Способ по п. 19, отличающийся тем, что скорость вращения косвенно регулируют запрашиваемым крутящим моментом .
21. Способ по п. 19, отличающийся тем, что каждое из указанного по меньшей мере одного существенного изменения имеет величину в пределах диапазона, соответствующего 10%-100% от общего доступного крутящего момента двигателя (101) в течение периода вычисления устройства регулировки, которое выполняет указанную регулировку.
22. Способ по п. 19, отличающийся тем, что каждое из указанного по меньшей мере одного существенного изменения крутящего момента, запрашиваемого от двигателя (101), продолжается в течение периода времени , который длительнее, чем период  впрыска, и короче, чем часть циклической продолжительности собственного колебания силовой передачи .
впрыска, и короче, чем часть циклической продолжительности собственного колебания силовой передачи .
23. Способ по п. 19, отличающийся тем, что величина изменения производной по времени зависит от величины существенного изменения крутящего момента, запрашиваемого от двигателя (101), и времени , необходимого для выполнения изменения производной по времени.
24. Способ по п. 19, отличающийся тем, что время , необходимое для изменения производной по времени, зависит от времени , необходимого для выполнения существенного изменения крутящего момента, запрашиваемого от двигателя (101).
25. Способ по п. 14, отличающийся тем, что производная  по времени динамического крутящего момента пропорциональна разности скоростей вращения.
по времени динамического крутящего момента пропорциональна разности скоростей вращения.
26. Способ по п. 14, отличающийся тем, что регулировка изменения производной по времени динамического крутящего момента обеспечивает по существу мгновенные изменения производной по времени.
27. Машиночитаемый носитель, содержащий компьютерную программу, которая включает в себя программный код и которая при выполнении программного кода на компьютере обеспечивает то, что компьютер осуществляет способ по любому из пп. 14-26.
| WO 2011003544 A2, 2011-01-13 | |||
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЛЕКАРСТВЕННЫХ ВЕЩЕСТВ | 1989 |
|
RU2019194C1 |
| US 2004107034 A1, 2004-06-03 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2267631C2 |
| TEMPLIN P | |||
| et al | |||
| An LQR torque compensator for driveline oscillation damping, 18th IEEE International Conference on Control Applications Part of 2009 IEEE Multi-conference on Systems and Control Saint Petersburg, Russia, 8-10 July 2009 | |||
| BERRIRI M | |||
| et al | |||
| Active damping of automotive powertrain oscillations by a partial torque compensator, Elsevier Ltd., Control Engineering Practice 16, 2008. | |||

