Область техники
Изобретение относится к управляемому гусеничному ходовому механизму в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
В уровне техники гусеничные ходовые механизмы обычно имеют возможность управления, реализуемую за счет того, что между гусеничными механизмами, расположенными на правой и левой стороне транспортного средства, обеспечивают разницу в частоте вращения, причем гусеница на внутреннем радиусе поворота вращается медленнее гусеницы на внешнем радиусе поворота. Подобные системы широко распространены, в том числе, в конструкциях гусеничных шасси для гусеничных тракторов, в бульдозерах, используемых в строительстве, и на военной бронированной технике.
Разность в частоте вращения правого и левого гусеничного механизма, необходимую для криволинейного движения, в так называемых конструкциях с тормозом механизма управления реализуют за счет индивидуальной активизации тормозов, связанных с гусеничными механизмами, таким образом, чтобы затормаживалась гусеница со стороны внутреннего радиуса поворота, в результате чего транспортное средство будет описывать вращательное и, тем самым, управляемое движение вокруг этой гусеницы. Однако сравнительно простая конструкция таких систем рулевого управления имеет ряд серьезных недостатков. Помимо повышенного износа тормозов подобные системы отличаются высокими потерями мощности. Кроме того, такие системы рулевого управления не отличаются чувствительностью управления, что препятствует их использованию на транспортных средствах, эксплуатируемых на высоких скоростях.
Из уровня техники известно решение этих недостатков, описанное, например, в патентной заявке US 2,336,911 или US 2,377,354. В этих заявках раскрыты системы дифференциального управления с гидростатическим приводом, регулируемые насосы которого в сочетании с гидравлическими двигателями могут придавать гусеницам транспортного средства различную скорость, причем регулируемые насосы питают гидравлические двигатели гидравлической жидкостью независимо друг от друга. Путем соответствующего подбора гидравлических двигателей можно реализовать управление такими гусеничными ходовыми механизмами на неподвижном транспортном средстве. Такая обширная функциональность, часто реализуемая с помощью планетарных зубчатых передач, приводит к высоким затратам на инженерные работы и, таким образом, к повышению стоимости и увеличению необходимого монтажного пространства. Кроме того, системы рулевого управления подобной конструкции отличаются значительными потерями мощности вследствие независимого питания гидравлических двигателей гидравлической средой.
Раскрытие изобретения
Таким образом, задачей настоящего изобретения является преодоление описанных недостатков, присущих уровню техники, и, в частности, разработка управляющей конструкции для гусеничного ходового механизма, которая будет отличаться низкой стоимостью производства и, в то же время, низким энергопотреблением.
Согласно изобретению, эта задача решена отличительными признаками пункта 1 формулы изобретения.
За счет того, что присоединенный к оси транспортного средства управляемый гусеничный ходовой механизм содержит правый и левый гусеничные механизмы, соединенные с помощью передачи деления мощности, а участки осей, относящиеся к гусеничным механизмам, функционально соединены с гидравлическими двигателями, причем в зависимости от угла поворота рулевого колеса обеспечена возможность изменения рабочих объемов гидравлических двигателей таким образом, чтобы гидравлическая жидкость, вытесненная из одного гидравлического двигателя, передавалась в другой гидравлический двигатель, можно реализовать экономически и энергетически эффективное управление гусеничным ходовым механизмом.
Необходимую разность в частотах вращения гидравлических двигателей, приводящих в движение гусеничные механизмы, можно реализовать технически простым способом, если гидравлический двигатель на внутреннем радиусе поворота будет иметь больший рабочий объем, а гидравлический двигатель на внешнем радиусе поворота будет иметь меньший рабочий объем. Благодаря этому гусеница на внутреннем радиусе поворота будет вращаться медленнее, чем гусеница на внешнем радиусе поворота.
В предпочтительном варианте осуществления изобретения перераспределение доступной гусеничному ходовому механизму энергии привода, поддерживающее рулевое управление транспортного средства, обеспечено за счет передачи энергии привода через передачу деления мощности, присоединенную к оси транспортного средства, на соответствующий участок оси, соединенный с гусеничным механизмом, причем к каждому участку оси присоединена ступень передачи, соединенная с соответствующим гидравлическим двигателем.
В следующем предпочтительном варианте осуществления изобретения обеспечена компактная конструкция за счет выполнения соответствующей ступени передачи в виде цилиндрической зубчатой ступени. Компактность дополнительно обеспечена за счет того, что гидравлические двигатели, присоединенные к участкам оси, соединены друг с другом в замкнутом гидравлическом контуре.
Чтобы свести к минимуму потери энергии во время движения по прямой, в предпочтительном варианте осуществления изобретения при равном угле поворота гидравлических двигателей, встроенных в замкнутый гидравлический контур, частота вращения гусеничных механизмов одинакова.
Поскольку привод ходовой части, определяющий скорость движения рабочей машины, не зависит от изменений скорости правого и левого гусеничного механизма при криволинейном движении, в предпочтительном варианте исполнения изобретения процесс управления не приводит к снижению путевой скорости.
Чтобы обеспечить обмен масла в замкнутом контуре, известным образом предусмотрена возможность подачи гидравлической жидкости в замкнутый гидравлический контур через внешний источник давления.
В следующем предпочтительном варианте осуществления изобретения рабочий тормоз рабочей машины поддерживает рулевое управление за счет возможности независимого торможения гусеничных механизмов.
В следующем предпочтительном варианте осуществления изобретения активация гидравлических двигателей обеспечивает компенсацию проскальзывания. В результате, в частности, описываемое изобретением управление гусеничным механизмом позволяет компенсировать или, по меньшей мере, свести к минимуму помехи, обусловленные неровностями грунта.
Кроме того, в следующем предпочтительном варианте осуществления изобретения высокоточное управление гусеничными механизмами можно применять, в том числе, для так называемого регулируемого движения (англ.: Controlled Trafic), высокоточного прохождения полос на поле.
В следующем предпочтительном варианте осуществления изобретения передача деления мощности может быть выполнена в виде дифференциальной передачи или гидравлического ходового привода с разделением потока мощности, причем в последнем варианте с каждым участком оси соединен гидравлический насос. Первый вариант выгоден, прежде всего, тем, что он позволяет получить экономичную и компактную конструкцию. Исполнение в виде гидростатического ходового привода выгодно тем, что компоненты, приводящие в движение гусеничные механизмы, могут быть установлены непосредственно в соответствующем гусеничном механизме таким образом, чтобы в области оси транспортного средства появлялось дополнительное монтажное пространство для других элементов.
Краткое описание чертежей
Прочие выгодные варианты осуществления раскрыты в зависимых пунктах формулы и описаны ниже на основании вариантов осуществления, представленных на нескольких фигурах. На фигурах изображено:
Фигура 1: схематичное изображение сельскохозяйственной рабочей машины, выполненной в виде зерноуборочного комбайна, с гусеничным ходовым механизмом.
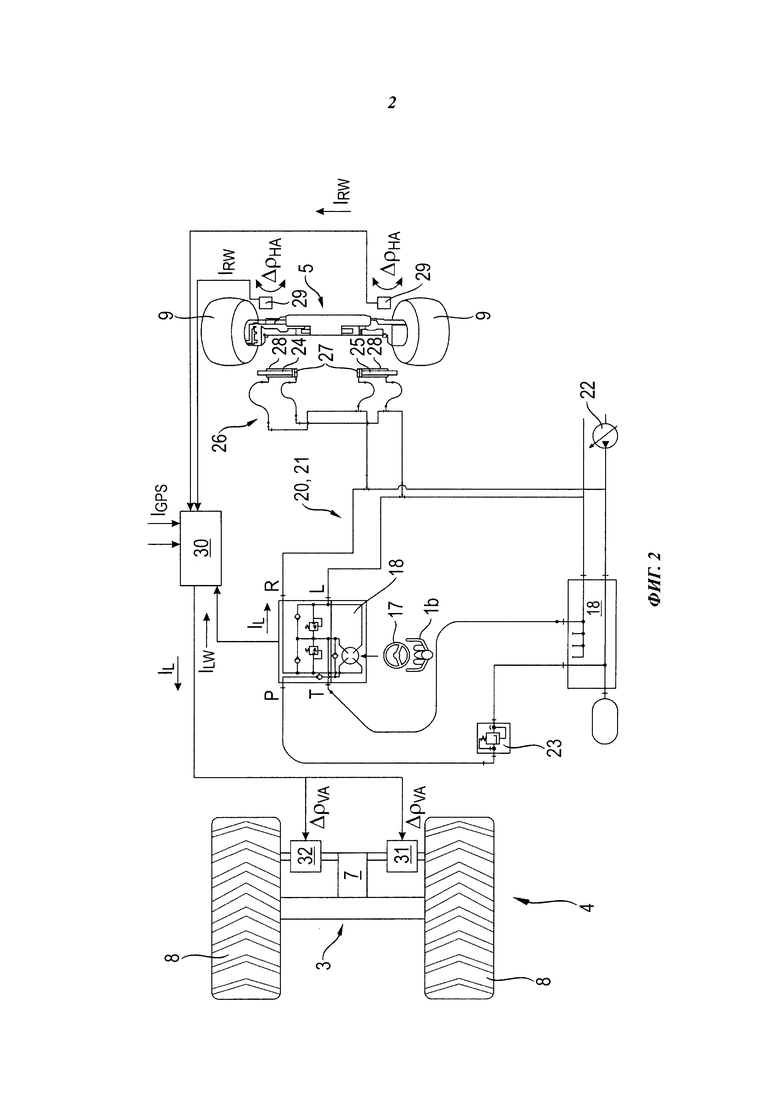
Фигура 2: первый подробный вид описываемой изобретением системы рулевого управления для гусеничного ходового механизма.
Фигура 3: подробный вид описываемой изобретением системы рулевого управления для гусеничного ходового механизма, изображенной на фигуре 2.
Осуществление изобретения
На фигуре 1 изображена рабочая машина 1, выполненная в виде зерноуборочного комбайна 2, передняя ось 3 которого выполнена в виде гусеничного ходового механизма 4, а задняя ось 5 в виде колесной оси 6. Согласно изобретению, рабочая машина 1 может быть также выполнена в виде кормоуборочного комбайна, трактора или другой самоходной рабочей машины, например, строительной или лесозаготовительной машины. Гусеничный ходовой механизм 4 содержит центральный приводной агрегат 7 (будет описан ниже), в состав которого входит по одному гусеничному механизму 8 с правой и левой стороны. В изображенном примере передняя ось 3 и задняя ось 5 имеют гидравлические приводы, причем, согласно изобретению, привод осей 3, 5 может быть также механическим, а также возможен привод только на переднюю ось 3. Кроме того, в изображенном варианте осуществления возможно управление только ведущими колесами 9, соединенными с задней осью 5, причем, согласно изобретению, все оси 3, 5 рабочей машины 1 известным образом могут быть выполнены управляемыми. Кроме того, можно предусмотреть оснащение всех осей 3, 5 рабочей машины 1 гусеничными механизмами 8 или оснащение гусеничными механизмами 8 только задней оси 5 вместо передней оси 3. Кроме того, сельскохозяйственная рабочая машина 1 содержит приводной двигатель 10, соединенный, по меньшей мере, с одним центральным гидравлическим приводным агрегатом 11. Центральный гидравлический приводной агрегат 11 подает гидравлическую жидкость через системы 12, 13 трубопроводов к гидравлическим узлам 14, 15, соединенным с передней и задней осями 3, 5, приводящим в движение эти оси и осуществляющим их рулевое управление в зависимости от модели.
На фигуре 2 более детально показана структура привода и рулевого управления передней оси 3 и задней оси 5, включая описываемое изобретением рулевое управление гусеничного ходового механизма 4, соединенного с передней осью 3. Рулевое колесо 17, приводимое в действие оператором 16 сельскохозяйственной рабочей машины, известным образом соединено с так называемым орбитролом 18, который преобразует отклонение рулевого колеса 17 в управление объемом потока гидравлической жидкости 19 через гидравлический контур 20 рулевого управления. В показанном варианте исполнения гидравлический контур 20 рулевого управления сначала содержит часть 21 контура, способствующую управлению ведущими колесами 9 задней оси 5. Эта часть 21 контура содержит, по меньшей мере, один насосный блок 22, предназначенный для создания необходимого давления жидкости, по меньшей мере, один обратный клапан 23, служащий предохранительным клапаном, орбитрол 18, а также по одному цилиндру 24, 25 гидравлического усилителя рулевого привода, соединенному с каждым ведущим колесом 9. Цилиндры 24, 25 гидравлического усилителя рулевого привода соединены друг с другом системами 26 трубопроводов таким образом, чтобы в каждом случае камера 27 (со стороны поверхности поршня) одного цилиндра 24, 25 гидравлического усилителя рулевого привода была соединена трубопроводом с камерой 28 (со стороны поршневого штока) другого цилиндра 25, 24. Тем самым гарантируется, что сигнал IL рулевого управления, генерируемый орбитролом 18, приведет к отклонению всех ведущих колес 9 задней оси на один угол ΔϕHA поворота. В показанном варианте осуществления к каждому ведущему колесу 9 присоединен датчик 29 угла поворота колеса, причем сигналы IRW угла поворота колеса, генерируемые соответствующими датчиками 29 угла поворота колеса, поступают на блок 30 управления. Известным образом, на блок 30 управления можно также передавать отклонение Δϕ рулевого колеса 17 посредством сигнала ILW угла поворота рулевого колеса. Кроме того, возможен вариант, в котором на блок 30 управления поступают сигналы IGPS угла поворота рулевого колеса, основанные на данных GPS.
Согласно изобретению, помимо этого известного и широко распространенного принципа рулевого управления необходимо предложить рулевое управление гусеничного ходового механизма 4, отличающееся высокой эксплуатационной надежностью и экономической эффективностью. В представленном варианте осуществления к каждому из гусеничных механизмов 8, присоединенных к передней оси 3, присоединены гидравлические двигатели 31, 32 (способ присоединения будет описан ниже). Эти двигатели соединены с соответствующими гусеничными механизмами 8 и центральным приводным агрегатом 7 передней оси 3 с возможностью передачи крутящего момента. В зависимости от сигналов I, поступающих на устройство 30 управления (в данном случае, сигнала IGPS угла поворота рулевого колеса на основе данных GPS, сигнала IRW угла поворота колеса и сигнала ILW угла поворота рулевого колеса, генерируемого в зависимости от положения рулевого колеса 17), устройство 30 управления формирует сигнал IL угла поворота, задающий разность частот вращения правого и левого гусеничного механизма 8. При этом полученная разность частот вращения пропорциональна виртуальному углу ΔϕVA поворота колеса на передней оси 3.
На фигуре 3 приведено детализированное изображение системы, описываемой изобретением. К центральной части схематично изображенной оси 36 транспортного средства, содержащей по обеим сторонам гусеничные механизмы 8, в данном случае, передней оси 3 присоединен центральный приводной агрегат 7. В показанном варианте исполнения центральный приводной агрегат 7 содержит выполненную в виде конического дифференциала дифференциальную передачу 33, причем в ее коробку 34 с возможностью вращения установлены две противоположные конические шестерни 35. Через стороны коробки 34 дифференциала, противоположные гусеничным механизмам 8, проходят участки 37 оси, на одну оконечность которых установлен правый или левый гусеничный механизм 8. На другую оконечность каждого участка 37 оси, находящуюся внутри коробки 34 дифференциала, без возможности вращения посажено коническое зубчатое колесо 38 таким образом, чтобы соответствующие смежные конические зубчатые колеса 35, 38 дифференциальной передачи 33 входили в зацепление друг с другом. Коробка 34 дифференциала также соединена без возможности вращения с цилиндрическим зубчатым колесом 39 цилиндрической зубчатой ступени 40, дополнительное цилиндрическое зубчатое колесо 41 которой соединено без возможности вращения с входным валом 42 редуктора центрального приводного агрегата 7, присоединенного к передней оси 3.
Каждый из участков 37 оси содержит выполненную в виде цилиндрической зубчатой ступени 43 ступень 44 передачи, цилиндрическое зубчатое колесо 45 которой соединено без возможности вращения с соответствующим участком 37 оси, соединенным с правым или левым гусеничным механизмом 8. Следующее цилиндрическое зубчатое колесо 46 каждой цилиндрической зубчатой ступени 43 соединено без возможности вращения с выходным валом 47, 48 гидравлического двигателя 31, 32, относящегося к соответствующему гусеничному механизму 8. Оба гидравлических двигателя 31, 32 интегрированы в замкнутый гидравлический контур 49, причем гидравлическую жидкость подают в замкнутый гидравлический контур 49 через известный контур 50 подачи. Контур 50 подачи известным образом содержит гидравлический насос 52, служащий внешним источником 51 давления, резервуар 53, а также системы 54, 55 охлаждения масла и фильтрации. Согласно изобретению, гидравлические двигатели 31, 32 интегрированы в замкнутый гидравлический контур 49 таким образом, чтобы рабочие объемы гидравлических двигателей 31, 32 можно было изменять в зависимости от угла поворота рулевого колеса таким образом, чтобы гидравлическая жидкость, вытесненная из одного гидравлического двигателя 31, 32, поступала на другой гидравлический двигатель 32, 31. Замкнутый гидравлический контур 49 и соединенный с ним контур 50 питания образуют вторую часть 56 гидравлического контура сельскохозяйственной рабочей машины 1, причем согласно изобретению контур питания может входить в состав первой части 21 контура.
Известным образом, энергия Р привода, приложенная к входному валу 42 редуктора, передается на коробку 34 дифференциальной передачи 33 через присоединенную к нему цилиндрическую зубчатую ступень 40. Конические зубчатые колеса 35, 38, входящие в зацепление друг с другом внутри коробки 34 дифференциала, распределяют доступную мощность Р привода в зависимости от крутящего момента посредством участков 37 оси по соответствующим гусеничным механизмам 8. В зависимости от баланса действующих сил и моментов участки 37 оси будут вращаться с одинаковой или различной частотой n1, n2. Благодаря тому, что, согласно изобретению, к каждому участку 37 оси присоединена ступень 43 передачи, соединенная с гидравлическим двигателем 31, 32, причем гидравлическая жидкость 19, вытесненная из одного гидравлического двигателя 31, 32, поступает в другой гидравлический двигатель 32, 31, энергию привода забирают у одного гусеничного механизма 8 и передают на другой гусеничный механизм 8. В результате участок 37 оси и, тем самым, соединенный с ним гусеничный механизм 8, на который поступает дополнительная энергия привода, будет вращаться быстрее, и наоборот, участок 37 оси и соединенный с ним гусеничный механизм 8, у которого была забрана энергия привода, будет вращаться медленнее. Таким образом, гусеничные механизмы 8 за счет своей различной скорости движения будут поддерживать процесс управления сельскохозяйственной рабочей машиной, то есть, будут образовывать виртуальный угол ΔϕVA поворота колеса. Чтобы это стало возможным, механизмы 57, 58 управления гидравлических двигателей 31, 32 соединены сигнальными проводами с устройством 30 управления, благодаря чему сигнал IL угла поворота, сгенерированный устройством 30 управления, можно передавать на каждый из механизмов 57, 58 управления. При этом гидравлические двигатели 31, 32 и передаваемый на каждый из них сигнал IL угла поворота подбирают таким образом, чтобы гидравлический двигатель 31, 32 со стороны внутреннего радиуса поворота имел больший рабочий объем, а гидравлический двигатель 31, 32 со стороны внешнего радиуса поворота имел меньший рабочий объем. Это приводит к тому, что гидравлический двигатель 31, 32 со стороны внутреннего радиуса поворота обеспечивает более низкую частоту n1, n2 вращения по сравнению с гидравлическим двигателем 32, 31 со стороны внешнего радиуса поворота, благодаря чему в конечном итоге гусеничный механизм 8 со стороны внутреннего радиуса поворота вращается с меньшей скоростью, чем гусеничный механизм 8 со стороны внешнего радиуса поворота, и, наконец, осуществляется регулирование виртуального угла поворота ΔϕVA колеса на передней оси 3, 36. Кроме того, гидравлические двигатели 31, 32 подобраны таким образом, чтобы при одинаковом угле α поворота не показанного на фигуре управляющего диска каждого гидравлического двигателя 31, 32 частота вращения гусеничных механизмов 8, относящихся к соответствующей оси 36 транспортного средства, была одинаковой, то есть, чтобы транспортное средство 1 при этом двигалось по прямой.
Виртуальный угол ΔϕVA поворота колеса, образованный осью 36 транспортного средства, несущей гусеничные механизмы 8, должен полностью соответствовать фактическому сигналу ILW угла поворота рулевого колеса, например, предварительно заданному рулевым колесом 17. Тем самым, известным и поэтому не описанным детально образом устройство 30 управления сначала рассчитывает траекторию транспортного средства 1 на основании сигнала ILW угла поворота колес, сгенерированного датчиком 29 угла поворота колес, с учетом радиуса поворота и геометрии транспортного средства. Затем для правого и левого гусеничного механизма 8 определяют конкретную криволинейную траекторию Kl, Kr, причем каждая из криволинейных траекторий Kl, Kr пропорциональна частоте n1, n2 вращения участка 37 оси, приводящего соответствующий гусеничный механизм 8. Каждая из этих частот n1, n2 вращения соответствует частоте вращения на выходе соответствующего гидравлического двигателя 31, 32, на которую влияет установка определенного угла α поворота на соответствующем гидравлическом двигателе 31, 32, причем большой угол α поворота приводит к низкой частоте вращения на выходе.
Кроме того, согласно изобретению, на ходовой привод, определяющий скорость движения рабочей машины 1, не влияет изменение скорости правого или левого гусеничного механизма 8 при прохождении криволинейных участков. В простейшем случае эту схему реализуют за счет того, что первая часть 21 гидравлического контура работает независимо от дополнительной части 56 контура, предусмотренной изобретением. Обусловленную изменением частоты вращения на гусеничных механизмах 8 поддержку рулевого управления транспортного средства 1 можно известным образом усилить за счет частичной активизации рабочих тормозов 59, относящихся к соответствующим участкам 37 оси.
Известным образом, активизацию механизмов 57, 58 управления устройством 30 управления можно также использовать для компенсации возникающего проскальзывания гусеничных механизмов 8. Кроме того, обеспечиваемое изобретением высокоточное управление частотой вращения гусеничных механизмов 8 можно использовать, в конечном итоге, для очень точного управления прохождением сельскохозяйственной рабочей машиной 1 полос на поле, необходимого для так называемых процессов регулируемого движения (англ.: Controlled-Trafic).
Кроме того, согласно изобретению, передача 60 деления мощности, выполненная в представленном варианте исполнения в виде дифференциальной передачи 33, может быть также выполнена в виде не показанного на фигуре и известного из уровня техники гидростатического привода ходовой части. В этом случае к каждому из участков 37 оси присоединен гидравлический насос (не показанный на фигуре), который подает энергию привода на соответствующий гусеничный механизм 8.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 - рабочая машина
2 - зерноуборочный комбайн
3 - передняя ось
4 - гусеничный ходовой механизм
5 - задняя ось
6 - колесная ось
7 - центральный приводной агрегат
8 - гусеничный механизм
9 - ведущие колеса
10 - приводной двигатель
11 - гидравлический приводной агрегат
12 - система трубопроводов
13 - система трубопроводов
14 - гидравлический узел
15 - гидравлический узел
16 - оператор
17 - рулевое колесо
18 - орбитрол
19 - гидравлическая жидкость
20 - гидравлический контур рулевого управления
21 - часть контура
22 - насосный блок
23 - обратный клапан
24 - цилиндр гидравлического усилителя рулевого привода
25 - цилиндр гидравлического усилителя рулевого привода
26 - система трубопроводов
27 - камера со стороны поверхности поршня
28 - камера со стороны поршневого штока
29 - датчик угла поворота рулевого колеса
30 - устройство управления
31 - гидравлический двигатель
32 - гидравлический двигатель
33 - дифференциальная передача
34 - коробка дифференциала
35 - коническое зубчатое колесо
36 - ось транспортного средства
37 - участок оси
38 - коническое зубчатое колесо
39 - цилиндрическое зубчатое колесо
40 - цилиндрическая зубчатая ступень
41 - цилиндрическое зубчатое колесо
42 - входной вал редуктора
43 - цилиндрическая зубчатая ступень
44 - ступень передачи
45 - цилиндрическое зубчатое колесо
46 - цилиндрическое зубчатое колесо
47 - выходной вал
48 - выходной вал
49 - замкнутый гидравлический контур
50 - контур питания
51 - внешний источник давления
52 - гидравлический насос
53 - резервуар
54 - масляный радиатор
55 - масляный фильтр
56 - часть контура
57 - механизм управления
58 - механизм управления
59 - рабочий тормоз
60 - передача деления мощности I сигнал
IGPS - сигнал угла поворота рулевого колеса на основании данных GPS
ILW - сигнал угла поворота рулевого колеса
ILW - сигнал угла поворота колес
IL - сигнал угла поворота
ΔϕНА - угол поворота задней оси
ΔϕVA - угол поворота передней оси
Δϕ - отклонение
Р - мощность привода
n1, n2 - частота вращения
α - угол поворота
K1, Kr - криволинейная траектория слева/справа
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2015 |
|
RU2674597C2 |
| УПРАВЛЯЕМЫЙ ГУСЕНИЧНЫЙ ХОДОВОЙ МЕХАНИЗМ СЕЛЬСКОХОЗЯЙСТВЕННОГО РАБОЧЕГО ТРАНСПОРТНОГО СРЕДСТВА И СЕЛЬСКОХОЗЯЙСТВЕННОЕ РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2677408C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ СОДЕЙСТВИЯ РУЛЕВОМУ УПРАВЛЕНИЮ | 2016 |
|
RU2701289C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2687400C2 |
| ДВУХГУСЕНИЧНЫЙ ТРАКТОР | 2013 |
|
RU2607932C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КАЧАЮЩЕЙСЯ ХОДОВОЙ ОСЬЮ | 2010 |
|
RU2531699C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ГУСЕНИЧНОМ ХОДУ | 2015 |
|
RU2666037C2 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2469878C2 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |


Изобретение относится к управляемому гусеничному ходовому механизму (4), содержащему правый и левый гусеничные механизмы (8), присоединенные к оси (36) транспортного средства, причем ось (36) транспортного средства содержит по меньшей мере одну передачу (60) деления мощности. Каждый из участков (37) оси, относящихся к гусеничным механизмам (8), функционально соединен с гидравлическим двигателем (31, 32), причем в зависимости от угла поворота рулевого колеса рабочие объемы гидравлических двигателей (31, 32) могут быть изменены таким образом, чтобы гидравлическая жидкость (19), вытесненная из одного гидравлического двигателя (31, 32), передавалась в другой гидравлический двигатель (32, 31). Технический результат: создание энергетически эффективного управления гусеничным ходовым механизмом. 11 з.п. ф-лы, 3 ил.
1. Управляемый гусеничный ходовой механизм, содержащий правый и левый гусеничные механизмы, присоединенные к оси транспортного средства, причем ось транспортного средства содержит по меньшей мере одну передачу деления мощности, а каждый из участков оси, относящихся к гусеничным механизмам, функционально соединен с гидравлическим двигателем, отличающийся тем, что в зависимости от угла поворота рулевого колеса обеспечена возможность изменения рабочих объемов гидравлических двигателей (31, 32) таким образом, чтобы гидравлическая жидкость (19), вытесненная из одного гидравлического двигателя (31, 32), передавалась в другой гидравлический двигатель (32, 31).
2. Управляемый гусеничный ходовой механизм по п. 1, отличающийся тем, что гидравлический двигатель (31, 32) на внутреннем радиусе поворота имеет больший рабочий объем, а гидравлический двигатель (32, 31) на внешнем радиусе поворота имеет меньший рабочий объем.
3. Управляемый гусеничный ходовой механизм по одному из предыдущих пунктов, отличающийся тем, что обеспечена возможность передачи энергии (P) привода через передачу (60) деления мощности, присоединенную к оси (36) транспортного средства, на участки (37) оси, соединенные с соответствующими гусеничными механизмами (8), причем к каждому участку (37) оси присоединена ступень (44) передачи, соединенная с соответствующим гидравлическим двигателем (31, 32).
4. Управляемый гусеничный ходовой механизм по п. 3, отличающийся тем, что соответствующая ступень (44) передачи выполнена в виде цилиндрической зубчатой ступени (43).
5. Управляемый гусеничный ходовой механизм по п. 3, отличающийся тем, что гидравлические двигатели (31, 32), присоединенные к участкам (37) оси, соединены друг с другом в замкнутом гидравлическом контуре (49).
6. Управляемый гусеничный ходовой механизм по п. 5, отличающийся тем, что при равном угле (α) поворота гидравлических двигателей (31, 32), встроенных в замкнутый гидравлический контур (49), частота вращения гусеничных механизмов (8), присоединенных к соответствующей оси (36) транспортного средства, одинакова.
7. Управляемый гусеничный ходовой механизм по одному из пп. 1, 2, 4-6, отличающийся тем, что привод ходовой части, определяющий скорость движения рабочей машины (1), не зависит от изменений скорости правого и левого гусеничного механизма (8) при криволинейном движении.
8. Управляемый гусеничный ходовой механизм по одному из пп. 1, 2, 4-6, отличающийся тем, что обеспечена возможность подачи гидравлической жидкости (19) в замкнутый гидравлический контур (49) через внешний источник (51) давления.
9. Управляемый гусеничный ходовой механизм по одному из пп. 1, 2, 4-6, отличающийся тем, что рабочий тормоз (59) рабочей машины (1) поддерживает рулевое управление.
10. Управляемый гусеничный ходовой механизм по одному из пп. 1, 2, 4-6, отличающийся тем, что активация гидравлических двигателей (31, 32) обеспечивает компенсацию проскальзывания.
11. Управляемый гусеничный ходовой механизм по одному из пп. 1, 2, 4-6, отличающийся тем, что активация гидравлических двигателей (31, 32) обеспечивает возможность осуществления регулируемого движения.
12. Управляемый гусеничный ходовой механизм по одному из пп. 1, 2, 4-6, отличающийся тем, что передача (60) деления мощности выполнена в виде дифференциальной передачи (33) или гидравлического ходового привода, причем при выполнении в виде гидравлического ходового привода к каждому участку (37) оси присоединен гидравлический насос.
| ПОЛИОЛЕФИНОВАЯ КОМПОЗИЦИЯ | 1992 |
|
RU2113446C1 |
| СПОСОБ УСТРАНЕНИЯ НЕВРОТИЧЕСКОЙ ФОРМЫ ЗАИКАНИЯ | 2007 |
|
RU2336911C1 |
| СПОСОБ СОЕДИНЕНИЯ ЧАСТЕЙ СТРЕЛКИ, СОСТОЯЩИХ ИЗ МАРГАНЦЕВОЙ СТАЛИ С ВЫСОКОЙ ТВЕРДОСТЬЮ, ИЛИ РЕЛЬСА ИЗ МАРГАНЦЕВОЙ СТАЛИ С РЕЛЬСОМ ИЗ УГЛЕРОДИСТОЙ СТАЛИ | 2005 |
|
RU2377354C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ ПРИВОДА/РУЛЕВОГО УПРАВЛЕНИЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2247049C2 |

