ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к автоматической парковке и рулевому управлению транспортными средствами.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Автоматические системы парковки известного уровня техники используют сложные программы для регулировки положения транспортного средства. Необходима простая программа, которая безопасным и эффективным образом регулирует положение транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Транспортное средство в соответствии с настоящим изобретением включает в себя: двигатель(и), систему рулевого управления, процессор(ы), выполненный с возможностью: (a) приема текущего курса; (b) приема требуемого курса; (c) вычисления первого угла (FSA) поворота на основе пунктов (a) и (b); (d) перемещения транспортного средства посредством двигателя(ей) и системы рулевого управления: (i) в первом направлении на основе FSA; (ii) во втором противоположном направлении на основе угла, противоположного FSA.
При этом угол, противоположный FSA, равен отрицательной единице, умноженной на FSA.
При этом FSA=коэффициент направления × погрешность курса × коэффициент усиления.
При этом погрешность курса=текущий курс минус требуемый курс.
При этом процессор(ы) выполнен с возможностью автоматического зеркального отображения перемещения в пункте (d)(ii) относительно перемещения в пункте (d)(i) так, чтобы перемещение в пункте (d)(ii) зеркально отображало перемещение в пункте (d)(i).
При этом транспортное средство включает в себя тормоза и процессор(ы), выполненный с возможностью остановки транспортного средства посредством тормозов, при соответствии текущего курса требуемому курсу в заданных пределах.
При этом процессор(ы) выполнен с возможностью: вычисления заданных пределов как функции от измеренного расстояния от транспортного средства до бордюра.
При этом процессор(ы) выполнен с возможностью автоматического перемещения транспортного средства в первом направлении из первого местоположения во второе местоположение, затем автоматического и без дополнительного пользовательского ввода перемещения транспортного средства во втором направлении из второго местоположения в первое местоположение.
При этом процессор(ы) выполнен с возможностью установки начальной точки транспортного средства в качестве первого местоположения, установки второго местоположения на основе местоположения обнаруженного препятствия.
При этом процессор(ы) выполнен с возможностью автоматического повторения пунктов (c), (d)(i) и (d)(ii) до тех пор, пока текущий курс не будет надлежащим образом соответствовать требуемому курсу.
Способ в соответствии с настоящим изобретением включает в себя этапы, на которых: посредством процессора(ов) транспортного средства с использованием двигателя(ей) и системы рулевого управления: (a) принимают текущий курс; (b) принимают требуемый курс; (c) вычисляют первый угол (FSA) поворота на основе пунктов (a) и (b); (d) перемещают транспортное средство посредством двигателя(ей) и системы рулевого управления: (i) в первом направлении на основе FSA; (ii) во втором противоположном направлении на основе угла, противоположного FSA.
При этом угол, противоположный FSA, равен отрицательной единице, умноженной на FSA.
При этом FSA=коэффициент направления × погрешность курса × коэффициент усиления.
При этом погрешность курса=текущий курс минус требуемый курс.
При этом способ содержит этап, на котором автоматически зеркально отображают перемещение в пункте (d)(ii) относительно перемещения в пункте (d)(i) так, чтобы перемещение в пункте (d)(ii) зеркально отображало перемещение в пункте (d)(i).
При этом транспортное средство включает в себя тормоза, и способ содержит этап, на котором: останавливают транспортное средство посредством тормозов, при соответствии текущего курса требуемому курсу в заданных пределах.
При этом способ содержит этап, на котором вычисляют заданные пределы как функцию от измеренного расстояния от транспортного средства до бордюра.
При этом способ содержит этап, на котором автоматически перемещают транспортное средство в первом направлении из первого местоположения во второе местоположение и затем без дополнительного пользовательского ввода автоматически перемещают транспортное средство во втором направлении из второго местоположения в первое местоположение.
При этом способ содержит этап, на котором устанавливают начальную точку транспортного средства в качестве первого местоположения, устанавливают второе местоположение на основе местоположения обнаруженного препятствия.
При этом способ содержит этап, на котором повторяют пункты (c), (d)(i) и (d)(ii) до тех пор, пока текущий курс не будет надлежащим образом соответствовать требуемому курсу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих далее чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть опущены, или в некоторых примерах пропорции могут быть преувеличены для подчеркивания и наглядной иллюстрации новых описанных в настоящем документе признаков. В дополнение, компоненты системы могут быть расположены различным образом, известным в уровне техники. Кроме того, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на различных видах.
Фигура 1 представляет собой структурную схему вычислительной системы транспортного средства.
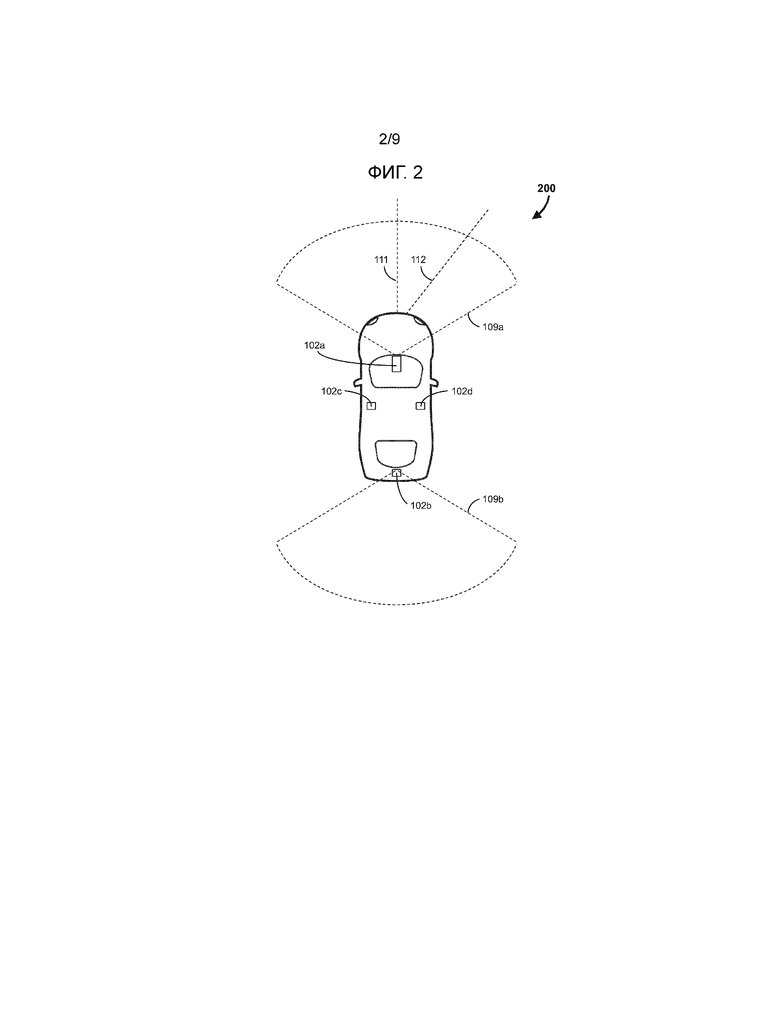
Фигура 2 представляет собой схематическое изображение транспортного средства, включающего в себя вычислительную систему транспортного средства.
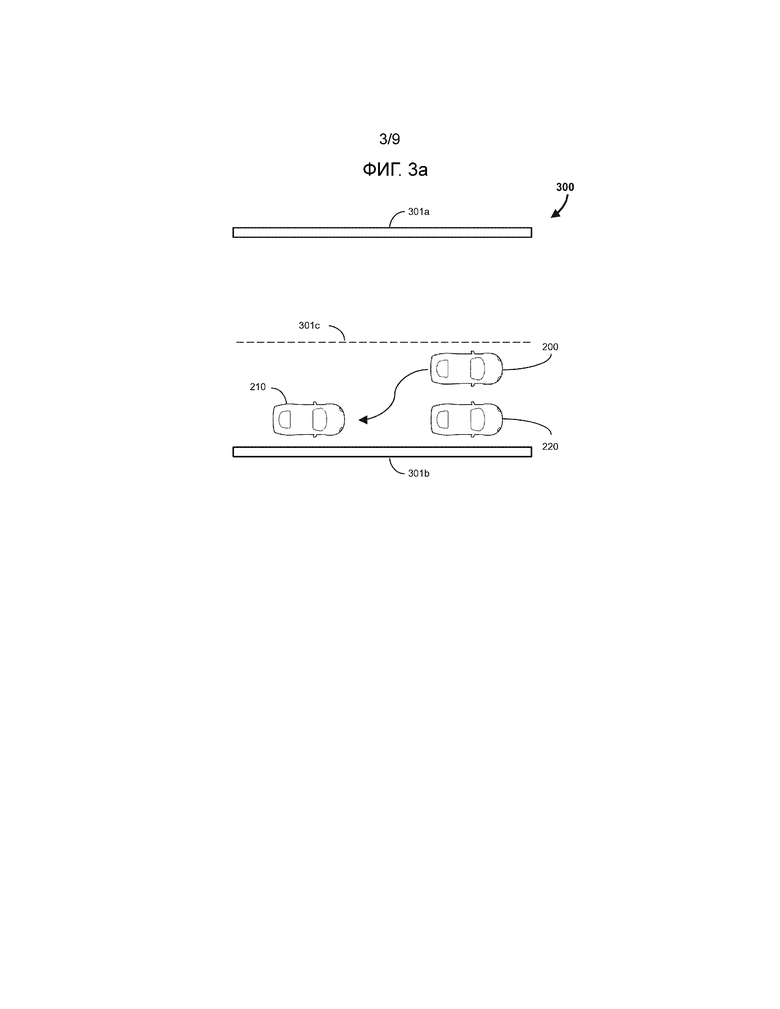
Фигуры 3a-3e показывают транспортное средство, выполняющее параллельную парковку в соответствии со способом, показанным на Фигуре 4.
Фигура 4 представляет собой блок-схему способа.
Фигура 5 показывает транспортное средство, выезжающее с подъездной дороги, в соответствии со способом, показанным на Фигуре 4.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты выполнения с пониманием, что настоящее раскрытие следует рассматривать как иллюстративный пример изобретения, а не как ограничение изобретения конкретными проиллюстрированными вариантами выполнения.
В настоящей заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование определенных или неопределенных артиклей не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов. Кроме того, союз «или» может быть использован для передачи одновременно присутствующих признаков в качестве одного варианта и взаимоисключающих альтернатив в качестве другого варианта. Другими словами, союз «или» следует понимать как подразумевающий значение «и/или» в качестве одного варианта и «либо/либо» в качестве другого варианта.
Фигура 1 показывает вычислительную систему 100 примерного транспортного средства 200. Транспортное средство 200 также называется первым транспортным средством 200. Транспортное средство 200 включает в себя двигатель, аккумулятор, по меньшей мере одно колесо, приводимое в движение двигателем, и систему рулевого управления, выполненную с возможностью поворота по меньшей мере одного колеса вокруг оси. Подходящие транспортные средства также описаны, например, в патентной заявке США № 14/991,496 на имя Miller и др. («Miller») и патенте США № 8,180,547 на имя Prasad и др. («Prasad»), оба из которых включены сюда путем ссылки во всей своей полноте. Вычислительная система 100 обеспечивает автоматическое управление механическими системами в пределах устройства. Она также обеспечивает связь с внешними устройствами. Вычислительная система 100 включает в себя шину 101 передачи данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательские интерфейсы 105, телематический блок 104, исполнительные механизмы и моторы 103 и локальные датчики 102.
Шина 101 передачи данных передает электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции с электронными сигналами или данными для получения модифицированных электронных сигналов или данных. Энергозависимая память 107 хранит данные для немедленного вызова процессором 108. Энергонезависимая память 106 хранит данные для вызова в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя ряд энергонезависимых запоминающих устройств, в том числе жесткие диски, SSD, DVD, Blu-Rays и т.д. Пользовательский интерфейс 105 включает в себя дисплеи, сенсорные дисплеи, клавиатуры, кнопки и другие устройства, обеспечивающие взаимодействие пользователя с вычислительной системой. Телематический блок 104 обеспечивает как проводную, так и беспроводную связь с внешними процессорами посредством Bluetooth, сотовых данных (например, 3G, LTE), USB и т.д. Телематический блок 104 может быть выполнен с возможностью передачи сигналов на определенной частоте.
Исполнительные механизмы/моторы 103 производят физические результаты. Примеры исполнительных механизмов/моторов включают в себя топливные форсунки, стеклоочистители ветрового стекла, схемы стоп-сигналов, коробки передач, подушки безопасности, двигатели, силовые моторы, рулевое управление и т.д. Локальные датчики 102 передают цифровые показания или измерения в процессор 108. Примеры подходящих датчиков включают в себя датчики температуры, датчики вращения, датчики ремней безопасности, датчики скорости, камеры, лидарные датчики, радиолокационные датчики и т.д. Следует понимать, что различные подключенные компоненты на Фигуре 1 могут включать в себя отдельные или специализированные процессоры и память. Более подробно структура и операции вычислительной системы 100 описаны, например, в документах на имя Miller и/или Prasad.
Фигура 2 в общем показывает и иллюстрирует транспортное средство 200, которое включает в себя вычислительную систему 100. Хотя не показано, транспортное средство 200 находится в оперативной беспроводной связи с мобильным устройством, таким как мобильный телефон. Некоторые локальные датчики 102 установлены снаружи транспортного средства 200. Локальный датчик 102а может представлять собой ультразвуковой датчик, лидарный датчик, камеру, видеокамеру и/или микрофон и т.д. Локальный датчик 102а может быть выполнен с возможностью обнаружения объектов перед транспортным средством 200, как обозначено передним диапазоном 109a обнаружения. Локальный датчик 102b может представлять собой ультразвуковой датчик, лидарный датчик, камеру, видеокамеру и/или микрофон и т.д. Локальный датчик 102b может быть выполнен с возможностью обнаружения объектов позади транспортного средства 200, как обозначено задним диапазоном 109b обнаружения. Левый датчик 102c и правый датчик 102d могут быть выполнены с возможностью выполнения тех же функций для левой и правой сторон транспортного средства 200. Транспортное средство 200 включает в себя множество других датчиков 102, расположенных в салоне транспортного средства или снаружи транспортного средства. Эти датчики могут включать в себя некоторые или все датчики, раскрытые в документе на имя Prasad.
Следует понимать, что транспортное средство 200 выполнено с возможностью выполнения описанных ниже способов и операций. В некоторых случаях транспортное средство 200 выполнено с возможностью выполнения этих функций посредством компьютерных программ, сохраненных в энергозависимой и/или энергонезависимой памяти вычислительной системы 100. Процессор «выполнен с возможностью» выполнения раскрытой операции при нахождении процессора в оперативной связи с памятью, хранящей программу с кодом или инструкциями, воплощающими раскрытую операцию. Дополнительное описание взаимодействия процессора, памяти и программ приведено в документе на имя Prasad. Следует понимать, что мобильное устройство или внешний сервер в оперативной связи с транспортным средством 200 может выполнять некоторые или все рассмотренные ниже способы и операции.
В соответствии с различными вариантами выполнения транспортное средство 200 включает в себя некоторые или все признаки транспортного средства 100a из документа на имя Prasad. В различных вариантах выполнения вычислительная система 100 включает в себя некоторые или все признаки VCCS 102 на Фигуре 2 в документе на имя Prasad. В различных вариантах выполнения транспортное средство 200 находится в сообщении с некоторыми или всеми устройствами, показанными на Фигуре 1 в документе на имя Prasad, включая мобильное устройство 110, коммуникационную башню 116, телекоммуникационную сеть 118, сеть интернет 120 и центр 122 обработки данных.
Выражение «загруженное транспортное средство» при использовании в формуле изобретения определено следующим образом: «транспортное средство, включающее в себя: двигатель, множество колес, источник питания и систему рулевого управления; в котором двигатель передает крутящий момент по меньшей мере на одно из множества колес, тем самым приводя в движение по меньшей мере одно из множества колес; в котором источник питания подает энергию на двигатель; и в котором система рулевого управления выполнена с возможностью управления по меньшей мере одним из множества колес». Выражение «оборудованное электрическое транспортное средство» при использовании в формуле изобретения определено как «транспортное средство, включающее в себя: аккумулятор, множество колес, двигатель, систему рулевого управления; в котором двигатель передает крутящий момент по меньшей мере на одно из множества колес, тем самым приводя в движение по меньшей мере одно из множества колес; в котором аккумулятор является перезаряжаемым и выполнен с возможностью подачи электрической энергии на двигатель, тем самым приводя в действие двигатель; и в котором система рулевого управления выполнена с возможностью управления по меньшей мере одним из множества колес».
Вернемся к Фигуре 2, транспортное средство 200 (т.е. первое транспортное средство 200) имеет текущий курс 111. Текущий курс 111 проходит вдоль опорного прямолинейного отрезка, делящего пополам транспортное средство 200 и в общем перпендикулярного осям. Водитель (который может представлять собой автоматическую программу) транспортного средства 200 назначает требуемый курс 112. Выполняется рулевое управление транспортным средством 200 для соответствия текущего курса 111 требуемому курсу 112.
Фигура 4 в общем показывает и иллюстрирует примерный способ 400 поворота в соответствии с настоящим изобретением. Способ 400 поворота позволяет транспортному средству 200 приводить текущий курс 111 в соответствие с требуемым курсом 112 посредством одного или более поворотов. Способ 400 поворота сохранен в памяти 106 и/или 107 транспортного средства в виде программы поворота и выполняется процессором 108 транспортного средства. Таким образом, транспортное средство 200 выполнено с возможностью выполнения каждого этапа способа 400 поворота.
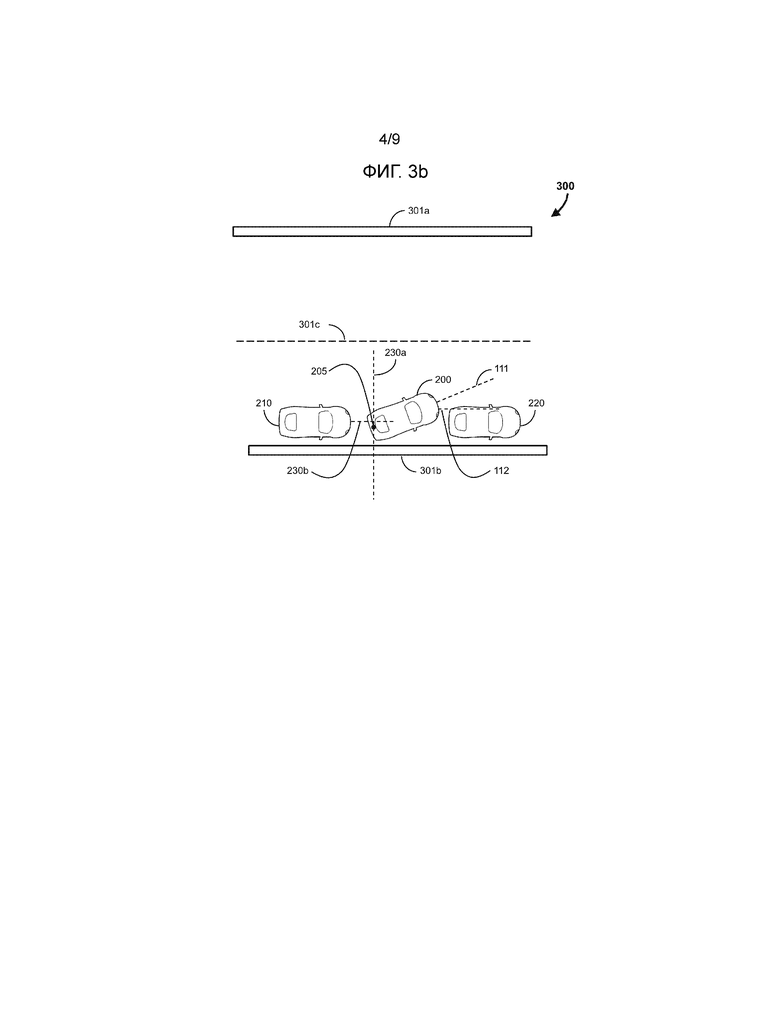
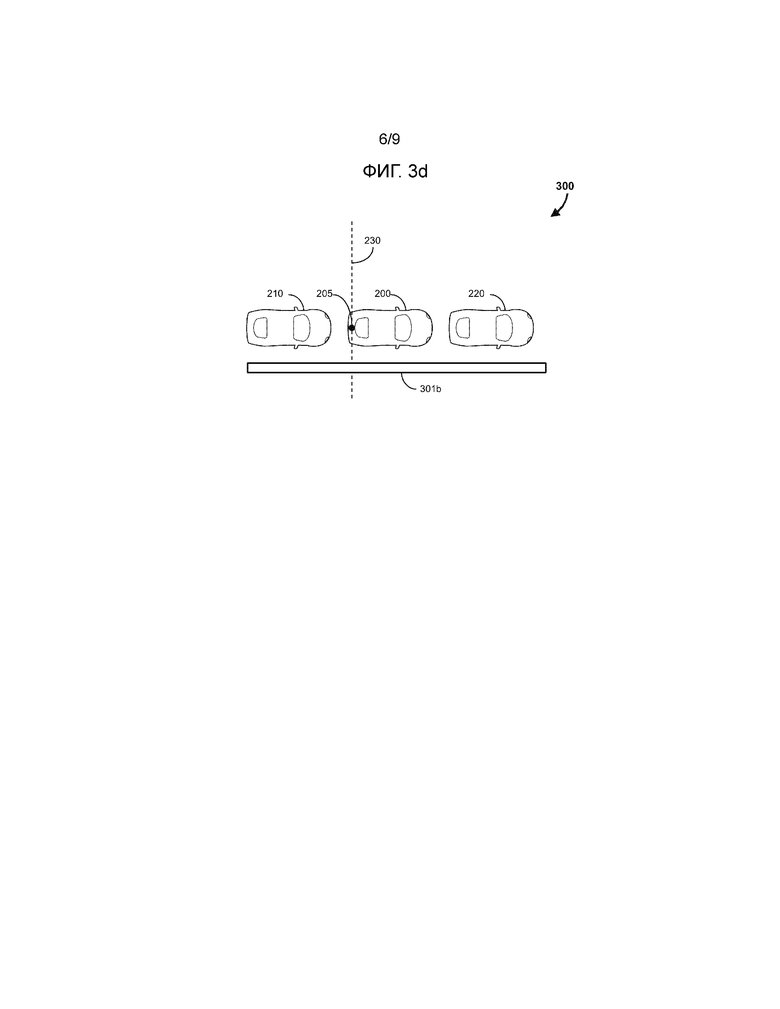
На этапе 402 водитель транспортного средства 200 (который может представлять собой человека или автономную программу) размещает среднюю точку 205 задней оси в требуемом местоположении. Как показано на Фигуре 3b, требуемое местоположение представляет собой пересечение линий 230a и 230b. После этапа 402 водитель подает команду транспортному средству 200 на выполнение этапов 404-418 способа 400.
На этапе 412 транспортное средство 200 определяет текущий курс 111. На этапе 414 водитель вводит требуемый курс 112. На этапе 418 транспортное средство определяет текущее направление движения (т.е. находится ли транспортное средство в направлении вперед или назад).
На этапе 404 транспортное средство 200 вычисляет первый угол поворота транспортного средства на основе входных данных от этапов 412, 414 и 418. В частности, транспортное средство 200 вычисляет угол поворота в соответствии со следующей формулой: Первый угол поворота=Коэффициент направления × Погрешность курса × Коэффициент усиления. Следует понимать, что угол поворота может быть ограничен заданным максимумом и/или минимумом.
В вышеуказанной формуле коэффициент направления является отрицательным в случае направления движения вперед, и положительным в случае направления движения назад. Погрешность курса определена как: текущий курс - требуемый курс. Коэффициент усиления представляет собой заданную и корректируемую постоянную.
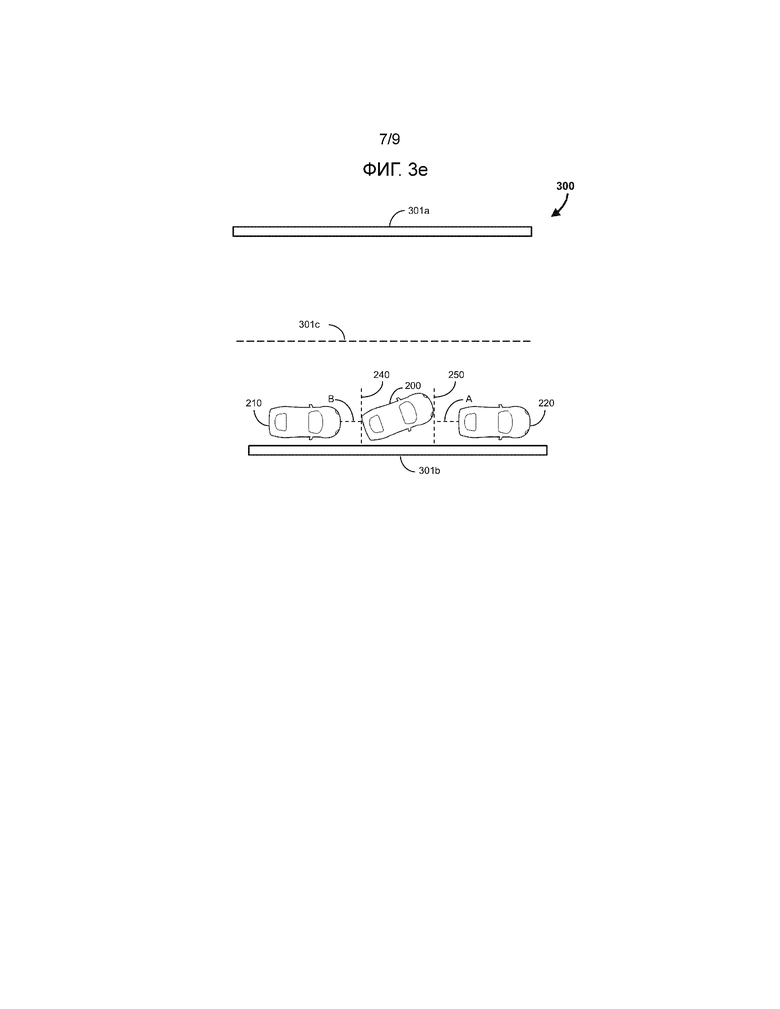
На этапе 416 транспортное средство вычисляет передний зазор A и задний зазор B. Со ссылкой на Фигуру 3e передний зазор A может быть определен как расстояние между касательной к поверхности транспортного средства 200, наиболее близкой к переднему транспортному средству 220, и передним транспортным средством 220. Задний зазор B может быть определен как расстояние между касательной к поверхности транспортного средства 200, наиболее близкой к заднему транспортному средству 210, и задним транспортным средством 210. На этапе 406 транспортное средство движется вперед или назад в соответствии с вычисленным первым углом поворота на этапе 404 и на основе соответствующего зазора из зазоров, измеренных на этапе 416. Если транспортное средство движется вперед, то соответствующий зазор представляет собой передний зазор. Если транспортное средство движется назад, то соответствующий зазор представляет собой задний зазор. В соответствии с различными вариантами выполнения транспортное средство 200 выполнено с возможностью ограничения заданного максимального расстояния перемещения до этапа 406 так, что перемещение на этапе 406 не может превышать заданное максимальное расстояние перемещения.
Следует понимать, что транспортное средство 200 выполнено с возможностью движения вперед или назад на этапе 406 в соответствии с двумя различными схемами: (a) путем поворота или рулевого управления колесами, когда транспортное средство неподвижно, и до перемещения вперед или назад; (b) путем постепенного поворота или рулевого управления колесами в направлении первого угла поворота во время движения транспортного средства. Транспортное средство движется вперед или назад до тех пор, пока первый соответствующий зазор не примет заданное минимальное значение (т.е. передний зазор при движении транспортного средства 200 вперед; задний зазор при движении транспортного средства 200 назад), или до тех пор, пока транспортное средство 200 не преодолеет заданное максимальное расстояние перемещения.
На этапе 408 транспортное средство 200 вычисляет второй угол поворота. Следует понимать, что второй угол поворота равен углу, противоположному первому углу поворота, вычисленному на этапе 404. Например, если первый угол поворота был положительным углом, составляющим десять градусов, то второй угол поворота будет отрицательным углом, составляющим десять градусов.
На этапе 410 транспортное средство 200 движется назад или движется вперед (т.е. перемещается в противоположном направлении относительно этапа 406) в соответствии со вторым углом поворота и на основе нового соответствующего зазора, который расположен в противоположном направлении относительно первоначального соответствующего зазора. Подобно этапу 406 транспортное средство 200 выполнено с возможностью движения назад/вперед на этапе 410 в соответствии с двумя различными схемами: (a) путем поворота или рулевого управления колесами, когда транспортное средство неподвижно, и до перемещения назад; (b) путем постепенного поворота или рулевого управления колесами в направлении второго угла поворота во время движения транспортного средства.
Следует понимать, что движение на этапе 410 зеркально отображает движение на этапе 406. В частности, если на этапе 406 транспортное средство перемещалось в соответствии со схемой (a), то на этапе 410 транспортное средство перемещается в соответствии со схемой (a). Если на этапе 406 транспортное средство перемещалось в соответствии со схемой (b), то на этапе 410 транспортное средство перемещается в соответствии со схемой (b).
Если на этапе 406 транспортное средство перемещается в соответствии со схемой (b) и как указано выше, транспортное средство постепенно регулирует угол поворота по мере перемещения транспортного средства. Например, во время этапа 406 на расстоянии X от начальной точки на этапе 402 угол поворота может составлять Y. На расстоянии X+1 от начальной точки на этапе 402 угол поворота может составлять Y+10. Другими словами, во время выполнения схемы (b) угол поворота может постепенно регулироваться в направлении первого угла поворота как функция от расстояния или скорости транспортного средства.
На этапе 410 транспортное средство выполняет зеркальное отображение этапа 406. Другими словами, на этапе 410 транспортное средство постепенно регулирует угол поворота в соответствии с зеркальным отображением функции, выполненной на этапе 406. В соответствии с вышеописанным примером и во время движение на этапе 410 на расстоянии -X от начальной точки на этапе 408 угол поворота может составлять -Y. На расстоянии -(X+1) от начальной точки на этапе 408 угол поворота может составлять -(Y+10).
Транспортное средство 200 перемещается на этапе 410 до тех пор, пока средняя точка 205 задней оси не совпадет с местоположением на этапе 402 (т.е. не пересечет линии 230a и 230b). Таким образом, средняя точка задней оси транспортного средства 200 будет возвращена в то же положение, но текущий курс 111 транспортного средства 200 будет более точно соответствовать требуемому курсу 112.
После выполнения одного набора этапов 404-410 транспортное средство будет выполнять поворот, при котором средняя точка 205 находится в том же местоположении, что и на этапе 402, но текущий курс 111 более точно соответствует требуемому курсу 112. Таким образом, следует понимать, что выполнение этапов 404-410 представляет собой один поворот.
При выполнении способа 400 транспортное средство 200 непрерывно оценивает свое положение и может быть выполнено с возможностью завершения способа 400 в любой момент при удовлетворении определенных условий. В соответствии с различными вариантами выполнения определенные условия включают в себя погрешность курса. Таким образом, в соответствии с этими вариантами выполнения транспортное средство 200 немедленно завершает способ 400 при нахождении текущего курса 111 в пределах заданного или допустимого угла от требуемого курса 112. Заданный допустимый угол может представлять собой точное соответствие, 1%, 5%, 1˚, 5˚ и т.д. Заданный допустимый угол может корректироваться пользователем. Заданный допустимый угол может быть автоматически установлен на основе расстояния от транспортного средства 200 до бордюра так, что при нахождении транспортного средства ближе к бордюру заданный допустимый угол больше, а при нахождении транспортного средства дальше от бордюра заданный допустимый угол меньше.
Фигуры 3a-3d в общем показывают и иллюстрируют пример использования способа 400. Как показано на Фигурах 3a-3d, транспортное средство 200 выполняет ряд поворотов в соответствии со способом 400 для надлежащего выравнивания на месте для параллельной парковки, образованном между вторым транспортным средством 210, третьим транспортным средством 220 и нижним бордюром 301b. Как показано на Фигуре 3b, нижний бордюр 310 является частью дороги 300, которая включает в себя центральную линию 310c и верхний бордюр 301a.
На Фигуре 3a водитель транспортного средства 200 (как отмечено выше, водитель может представлять собой автоматическую программу) перемещает транспортное средство 200 назад до тех пор, пока средняя точка 205 задней оси транспортного средства 200 не будет надлежащим образом расположена и не пересечет линии 230a и 230b. Транспортное средство 200 может быть выполнено с возможностью автоматического вычисления пересечения линий 230a и 230b на основе размеров транспортного средства и положений заднего транспортного средства 210, переднего транспортного средства 220 и бордюра 301b. Водитель транспортного средства 200 выполняет перемещение назад до тех пор, пока средняя точка 205 не пересечет линии 230a и 230b.
Водитель транспортного средства 200 сообщает транспортному средству 200, что этап 402 выполнен, и что транспортному средству следует перейти к этапу 404. Будучи неподвижным, транспортное средство 200 определяет текущий курс на этапе 412, требуемый курс на этапе 414 и определяет направление движения на этапе 418. В примере использования на Фигуре 3b направление движения представляет направление вперед.
На этапе 404 транспортное средство 200 определяет первый угол поворота и определяет, следует ли реализовать схему (a) или схему (b). Если транспортное средство реализует схему (a), то транспортное средство 200 поворачивает колеса в соответствии с требуемым углом поворота и затем движется вперед. Если транспортное средство реализует схему (b), то транспортное средство 200 постепенно поворачивает колеса в направлении требуемого угла поворота при движении вперед в соответствии с заданной функцией. Как отмечено выше, заданная функция может быть основана на первом угле поворота и расстоянии от транспортного средства 200 (например, расстоянии от средней точки 205) до неподвижной начальной точки этапа 404 (в этом примере пересечение линий 230a и 230b).
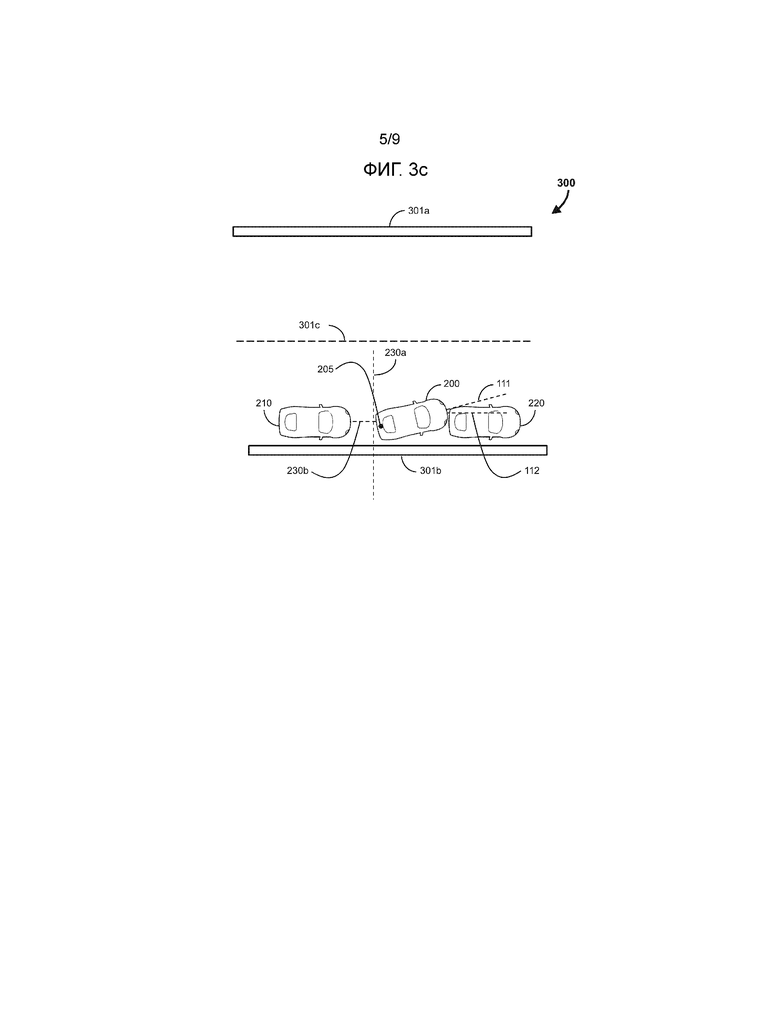
На фигуре 3c транспортное средство продвинулось вперед до тех пор, пока зазор между транспортным средством 200 и третьим транспортным средством 220 не достиг заданного уровня. На этапе 408 транспортное средство останавливается и вычисляет второй угол поворота. Как отмечено выше, второй угол поворота представляет собой зеркальное отображение первого угла поворота рулевого колеса.
На этапе 410 и как показано на Фигуре 3d, транспортное средство 200 движется назад до тех пор, пока средняя точка 205 не придет в соответствие (в заданных пределах соответствия) со средней точкой 205 на этапе 402, которая показана на Фигуре 3b. Если транспортное средство 200 движется назад в соответствии со схемой (b), то заданная функция может быть основана на втором угле поворота и расстоянии от транспортного средства (например, расстоянии от средней точки 205) до неподвижной начальной точки на этапе 408 (в этом примере средняя точка 205 транспортного средства 200, когда транспортное средство 200 было неподвижно на этапе 408). Другими словами, заданная функция рулевого управления на этапе 410 должна зеркально отображать заданную функцию рулевого управления на этапе 406.
Если после этапа 410 текущий курс 111 не соответствует требуемому курсу 112 в пределах заданного допустимого угла, то транспортное средство 200 возвращается на этап 404. Транспортное средство постоянно повторяет этапы 404, 406, 408 и 410 до тех пор, пока текущий курс 111 не будет соответствовать требуемому курсу 112 в пределах заданного допустимого угла.
Фигура 3 в общем показывает и иллюстрирует применение способа 400 для параллельной парковки транспортного средства 200. Следует понимать, что способ 400 также может быть применен к выезду с парковочного места. В таком случае требуемый курс 112 будет под углом относительно бордюра 301b. Вместо завершения при соответствии текущего курса 111 требуемому курсу 112 в пределах заданного допустимого угла, способ 400 (применительно к выезду с парковочного места) будет автоматически завершаться, когда транспортное средство 200 может выехать с парковочного места путем перемещения вперед или назад по текущему курсу 111 без контакта с препятствиями.
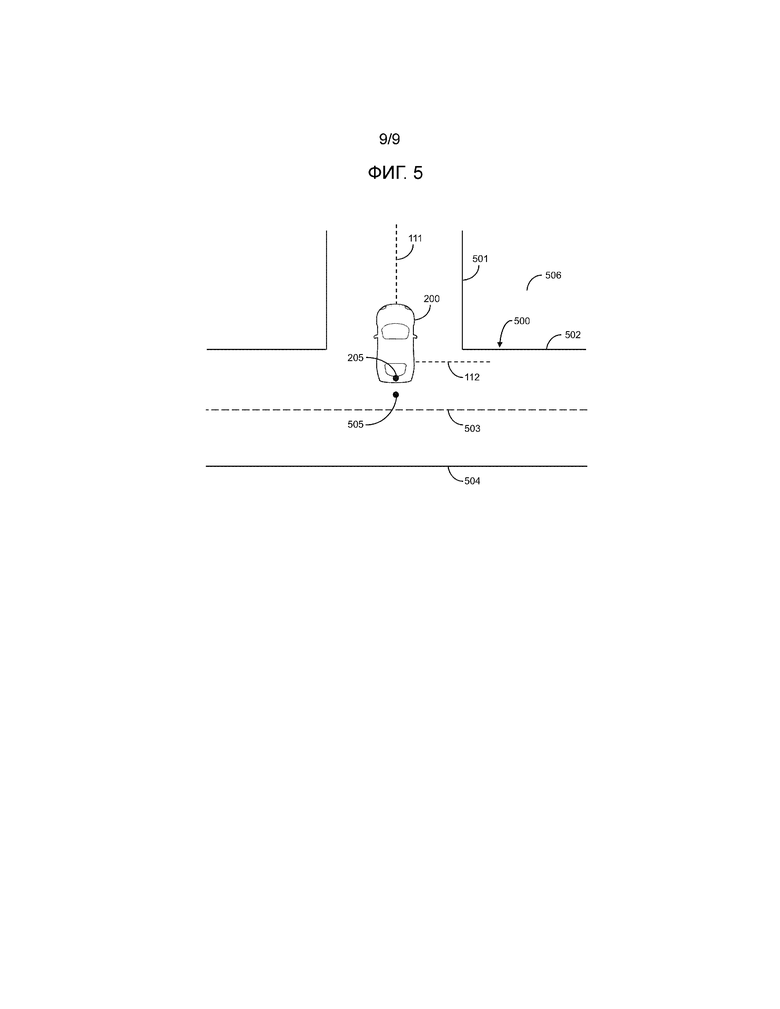
Следует понимать, что способ 400 может быть применен с другими примерами использования. Например, способ 400 может быть использован при выезде с подъездной дороги. Фигура 5 показывает подъездную дорогу 501, пересекающую улицу 500 с верхним бордюром 502, центральной линией 503 и нижним бордюром 504. Текущий курс 111 проходит параллельно подъездной дороге 501. Требуемый курс 112 проходит параллельно дороге 500.
Для достижения требуемого курса транспортное средство 200 выполняет способ 400, который, в конечном счете, приводит к соответствию текущего курса 111 (в заданных пределах соответствия) требуемому курсу 112. На этапе 402 водитель размещает среднюю точку 205 задней оси в требуемом местоположении 505. Водитель выдает инструкцию транспортному средству на переход к этапу 404. Способ 400 продолжается, как описано ранее, за исключением того, что зазоры на этапе 416 могут быть установлены со ссылкой на другие критерии. Зазоры на этапе 416 могут быть установлены так, чтобы (a) никакой участок транспортного средства 200 не пересекал центральную линию 503, и (b) транспортное средство 200 всегда оставалось в пределах области, образованной дорогой 500 и подъездной дорогой 501. Другими словами, зазоры на этапе 416 могут быть установлены так, чтобы несвязанная с дорогой область (например, газон) 506 была установлена в качестве переднего препятствия, и чтобы центральная линия 503 была установлена в качестве заднего препятствия.


Изобретение относится к системам управления автономным транспортным средством. Транспортное средство содержит двигатель, систему рулевого управления и процессор. Процессор выполнен с возможностью приема текущего курса, приема требуемого курса, вычисления первого угла (FSA) поворота на основе пунктов (a) и (b), автоматического перемещения транспортного средства посредством двигателя и системы рулевого управления в первом направлении на основе FSA и во втором противоположном направлении на основе угла, противоположного FSA. Достигается повышение безопасности управления автономным транспортным средством. 2 н. и 17 з.п. ф-лы, 9 ил.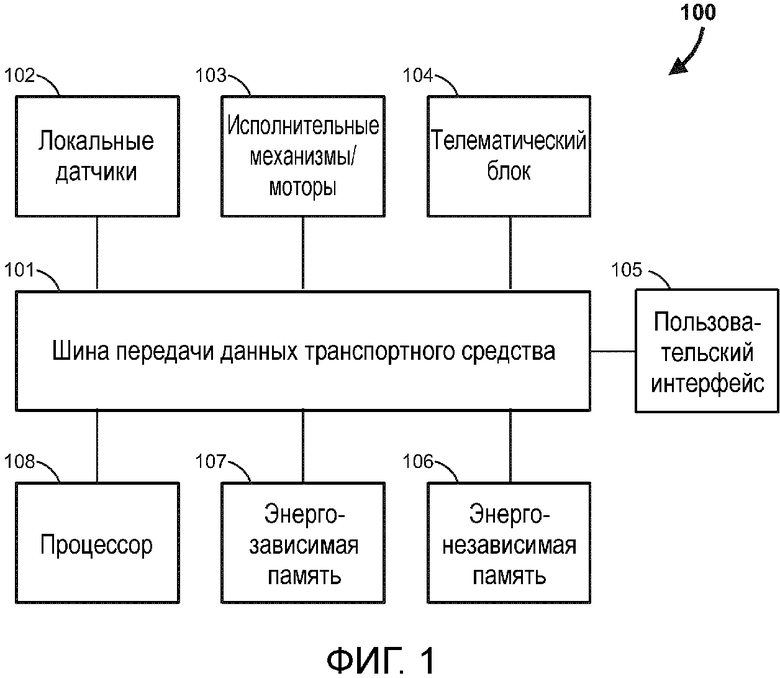
1. Транспортное средство, содержащее:
двигатель;
систему рулевого управления; и
процессор, выполненный с возможностью:
(a) приема текущего курса;
(b) приема требуемого курса;
(c) вычисления первого угла (FSA) поворота на основе пунктов (a) и (b);
(d) автоматического перемещения транспортного средства посредством двигателя и системы рулевого управления:
(i) в первом направлении на основе FSA;
(ii) во втором противоположном направлении на основе угла, противоположного FSA.
2. Транспортное средство по п. 1, в котором угол, противоположный FSA, равен отрицательной единице, умноженной на FSA.
3. Транспортное средство по п. 1, в котором FSA равен коэффициенту направления, умноженному на погрешность курса и умноженному на коэффициент усиления.
4. Транспортное средство по п. 3, в котором погрешность курса равна текущему курсу минус требуемый курс.
5. Транспортное средство по п. 1, в котором для перемещения транспортного средства во втором противоположном направлении процессор выполнен с возможностью зеркального перемещения транспортного средства в пункте (d)(i) посредством двигателя и системы рулевого управления.
6. Транспортное средство по п. 1, в котором транспортное средство включает в себя тормоза и процессор выполнен с возможностью остановки транспортного средства посредством тормозов, при соответствии текущего курса требуемому курсу в заданных пределах.
7. Транспортное средство по п. 6, в котором процессор выполнен с возможностью:
измерения, посредством ультразвуковых датчиков, расстояния до бордюра; и
вычисления заданных пределов как функции от измеренного расстояния от транспортного средства до бордюра.
8. Транспортное средство по п. 1, в котором процессор выполнен с возможностью:
автоматического перемещения транспортного средства, посредством двигателя и системы рулевого управления, в первом направлении из первого местоположения во второе местоположение, затем автоматического и без дополнительного пользовательского ввода перемещения транспортного средства во втором направлении из второго местоположения в первое местоположение.
9. Транспортное средство по п. 8, в котором процессор выполнен с возможностью:
обнаружения, посредством ультразвуковых датчиков, местоположения препятствия; и
установки начальной точки транспортного средства в качестве первого местоположения, установки второго местоположения на основе местоположения обнаруженного препятствия.
10. Транспортное средство по п. 1, в котором процессор выполнен с возможностью, до тех пор, пока текущий курс не будет надлежащим образом соответствовать требуемому курсу, автоматического повторения:
вычисления FSA на основе текущего курса и требуемого курса; и
перемещения транспортного средства, посредством двигателя и системы рулевого управления, в первом направлении на основе FSA и во втором противоположном направлении на основе угла, противоположного FSA.
11. Способ помощи при вождении, содержащий этапы, на которых:
(a) принимают, посредством системы рулевого управления, текущий курс;
(b) принимают, посредством системы рулевого управления, требуемый курс;
(c) вычисляют, посредством по меньшей мере одного процессора, первый угол (FSA) поворота на основе пунктов (a) и (b);
(d) автоматически перемещают транспортное средство посредством двигателя и системы рулевого управления:
(i) в первом направлении на основе FSA;
(ii) во втором противоположном направлении на основе угла, противоположного FSA.
12. Способ по п. 11, в котором угол, противоположный FSA, равен отрицательной единице, умноженной на FSA.
13. Способ по п. 12, в котором FSA равен коэффициенту направления, умноженному на погрешность курса и умноженному на коэффициент усиления.
14. Способ по п. 13, в котором погрешность курса равна текущему курсу минус требуемый курс.
15. Способ по п. 14, в котором перемещение транспортного средства во втором противоположном направлении содержит зеркальное перемещение транспортного средства в пункте (d)(i).
16. Способ по п. 15, в котором транспортное средство включает в себя тормоза, и способ содержит этап, на котором останавливают транспортное средство посредством тормозов, управляемых посредством по меньшей мере одного процессора, при соответствии текущего курса требуемому курсу в заданных пределах угла поворота.
17. Способ по п. 16, содержащий этап, на котором:
измеряют, посредством ультразвуковых датчиков, расстояние до бордюра; и
вычисляют, посредством по меньшей мере одного процессора, заданные пределы угла поворота как функцию от измеренного расстояния от транспортного средства до бордюра.
18. Способ по п. 17, содержащий этап, на котором:
обнаруживают, посредством ультразвуковых датчиков, местоположение препятствия;
устанавливают, посредством по меньшей мере одного процессора, начальную точку транспортного средства в качестве первого местоположения, устанавливают второе местоположение на основе местоположения обнаруженного препятствия; и
автоматически перемещают транспортное средство, посредством двигателя и системы рулевого управления, управляемых посредством по меньшей мере одного процессора, в первом направлении из первого местоположения во второе местоположение и затем, без дополнительного пользовательского ввода, автоматически перемещают транспортное средство во втором направлении из второго местоположения в первое местоположение.
19. Способ по п. 18, содержащий этап, на котором:
посредством по меньшей мере одного процессора, до тех пор, пока текущий курс не будет надлежащим образом соответствовать требуемому курсу, автоматически повторяют:
вычисление FSA на основе текущего курса и требуемого курса; и
перемещение транспортного средства, посредством двигателя и системы рулевого управления, в первом направлении на основе FSA и во втором противоположном направлении на основе угла, противоположного FSA.

