Область техники, к которой относится изобретение
Настоящее изобретение относится к навигационным системам и способам навигации, и более конкретно к системам и способам высокоточной навигации наземного транспортного средства.
Уровень техники
Описание уровня техники, приведенное в материалах настоящей заявки, предназначено для целей общего представления контекста изобретения. Работы указанных в настоящем документе авторов изобретения, насколько они описаны в данном разделе уровня техники, а также аспекты описания, которые иным образом не могут квалифицироваться как уровень техники в момент подачи, ни в явном виде, ни косвенно не признаются в качестве уровня техники по отношению к настоящему изобретению.
В некоторых отраслях промышленности, таких как сельскохозяйственная и горнодобывающая отрасли, может быть желательно обеспечивать точное навигационное наведение для наземных транспортных средств. Исключительно ради примера, трактор или другое сельскохозяйственное транспортное средство может пахать, культивировать, сажать растения, собирать урожай или иным образом работать в поле. Для обеспечения полного охвата поля наиболее эффективным образом транспортное средство может использовать навигационную систему, которая способствует наведению транспортного средства по требуемой траектории движения. В еще одном другом примере, горнодобывающему транспортному средству может быть необходимо двигаться по требуемой траектории движения по участку с полезными ископаемыми и/или на него и с него и использовать для этого навигационную систему. Такие навигационные системы могут пользоваться глобальной навигационной спутниковой системой («GNSS») или аналогичной системой для содействия средствам определения местоположения и наведения. GNSS является системой спутников, которые обеспечивают определение геопространственного положения для приемника или группы приемников.
Современные навигационные системы и способы навигации для наземных транспортных средств (тракторов, горнодобывающих транспортных средств, и т. д.) могут иметь ряд ограничений, которые влияют на точность или другие характеристики наведения. Остается потребность в улучшенной навигационной системе для наземных транспортных средств.
Раскрытие изобретения
Согласно различным аспектам настоящего изобретения, раскрыт способ наведения наземного транспортного средства по требуемой траектории движения. Способ может включать в себя прием сигнала положения с антенны глобальной навигационной спутниковой системы (GNSS), установленной в первом местоположении на наземном транспортном средстве. Сигнал положения может указывать пространственное положение антенны GNSS, указываемое из GNSS. Способ дополнительно может включать в себя прием гироскопического сигнала с гиродатчика, который указывает: (i) по меньшей мере одно из угла продольного наклона и угла поперечного наклона наземного транспортного средства, и (ii) основанное на гироскопе курсовое направление. Кроме того, способ может включать в себя определение положения интересующей точки наземного транспортного средства во втором местоположении, ином чем первое местоположение, на основании сигнала положения, гироскопического сигнала и взаимного расположения между первым местоположением и вторым местоположением. Положение интересующей точки наземного транспортного средства может определяться относительно поверхности, на которой расположено наземное транспортное средство, и может корректироваться с учетом по меньшей мере одного из угла продольного наклона и угла поперечного наклона наземного транспортного средства. Способ дополнительно может включать в себя определение основанного на положении курсового направления интересующей точки наземного транспортного средства на основании определенного положения интересующей точки и по меньшей мере одного определенного ранее положения интересующей точки, и определение калиброванного курсового направления на основании комбинации основанного на гироскопе курсового направления и основанного на положении курсового направления. Способ также может включать в себя выдачу сигнала управления на основании положения интересующей точки, калиброванного курсового направления и требуемой траектории движения. Сигнал управления может быть выполнен с возможностью использования для содействия наведению наземного транспортного средства таким образом, чтобы положение интересующей точки находилось на требуемой траектории движения.
Согласно дополнительным аспектам настоящего изобретения, раскрыта навигационная система для наземного транспортного средства. Навигационная система может включать в себя один или более процессоров и постоянный машиночитаемый запоминающий носитель, на котором сохранено множество команд, которые при выполнении одним или более процессоров побуждают один или более процессоров выполнять различные операции. Эти операции могут включать в себя прием сигнала положения с антенны глобальной навигационной спутниковой системы (GNSS), установленной в первом местоположении на наземном транспортном средстве. Сигнал положения может указывать пространственное положение антенны GNSS в качестве указываемого из GNSS. Операции дополнительно могут включать в себя прием гироскопического сигнала с гиродатчика, который указывает: (i) по меньшей мере один из угла продольного наклона и угла поперечного наклона наземного транспортного средства, и (ii) основанное на гироскопе курсовое направление. Кроме того, операции могут включать в себя определение положения интересующей точки наземного транспортного средства во втором местоположении, ином чем первое местоположение, на основании сигнала положения, гироскопического сигнала и взаимного расположения между первым местоположением и вторым местоположением. Положение интересующей точки наземного транспортного средства может определяться относительно поверхности, на которой расположено наземное транспортное средство, и может корректироваться с учетом по меньшей мере одного из угла продольного наклона и угла поперечного наклона наземного транспортного средства. Операции дополнительно могут включать в себя определение основанного на положении курсового направления интересующей точки наземного транспортного средства на основании определенного положения интересующей точки и по меньшей мере одного определенного ранее положения интересующей точки, и определение калиброванного курсового направления на основании комбинации основанного на гироскопе курсового направления и основанного на положении курсового направления. Операции также могут включать в себя выдачу сигнала управления на основании положения интересующей точки, калиброванного курсового направления и требуемой траектории движения. Сигнал управления может быть выполнен с возможностью использования для содействия наведению наземного транспортного средства таким образом, чтобы положение интересующей точки находилось на требуемой траектории движения.
Другие области применения настоящего изобретения станут очевидными из подробного описания, приведенного ниже. Должно быть понятно, что подробное описание и конкретные примеры предназначены только для целей иллюстрации, и не подразумеваются ограничивающими объем изобретения.
Краткое описание чертежей
Настоящее изобретение станет понятнее из подробного описания и прилагаемых чертежей, на которых:
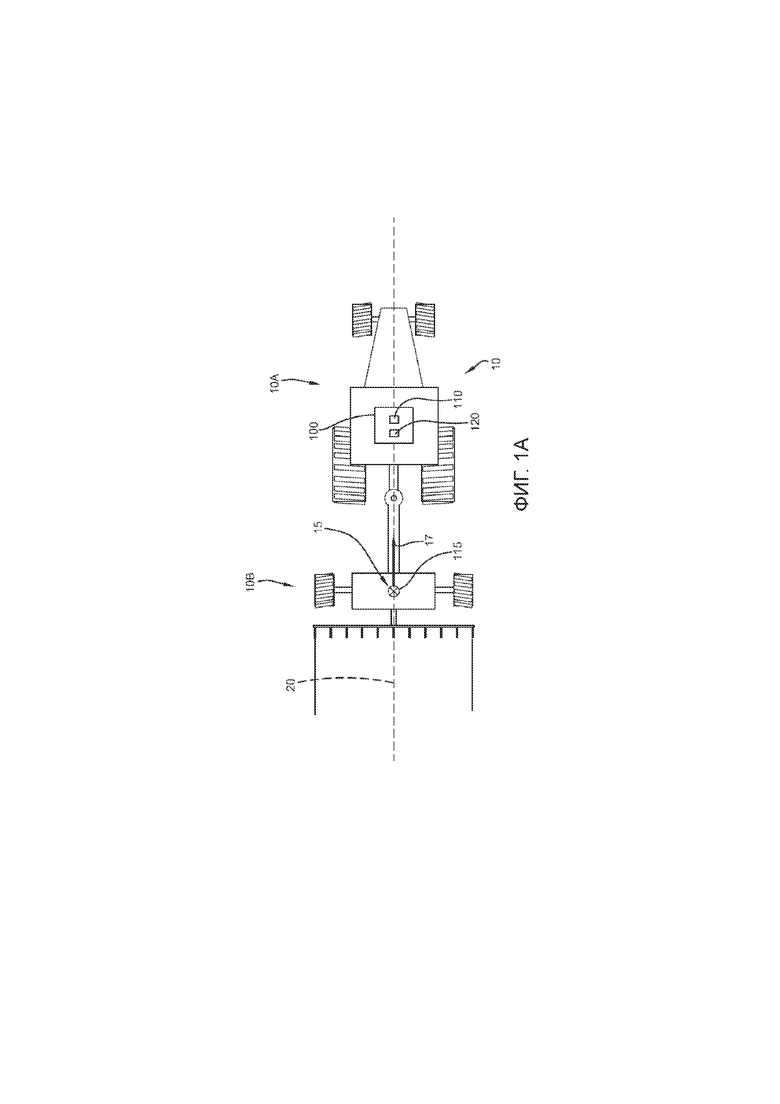
фиг. 1A - схематический вид сверху примерного наземного транспортного средства, которое включает в себя примерную навигационную систему согласно некоторым реализациям настоящего изобретения;
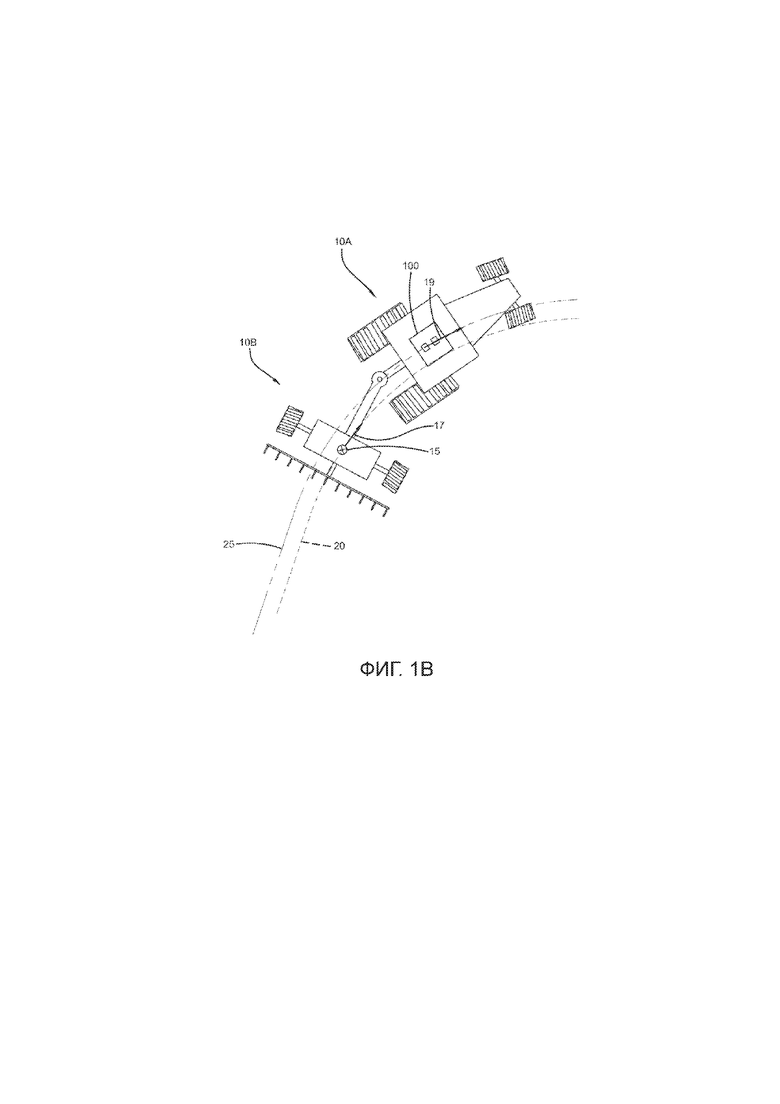
фиг. 1B - схематический вид сверху примерного наземного транспортного средства по фиг. 1A, который иллюстрирует расхождение между требуемой траекторией движения интересующей точки на наземном транспортном средстве и реальной траекторией движения наземного транспортного средства;
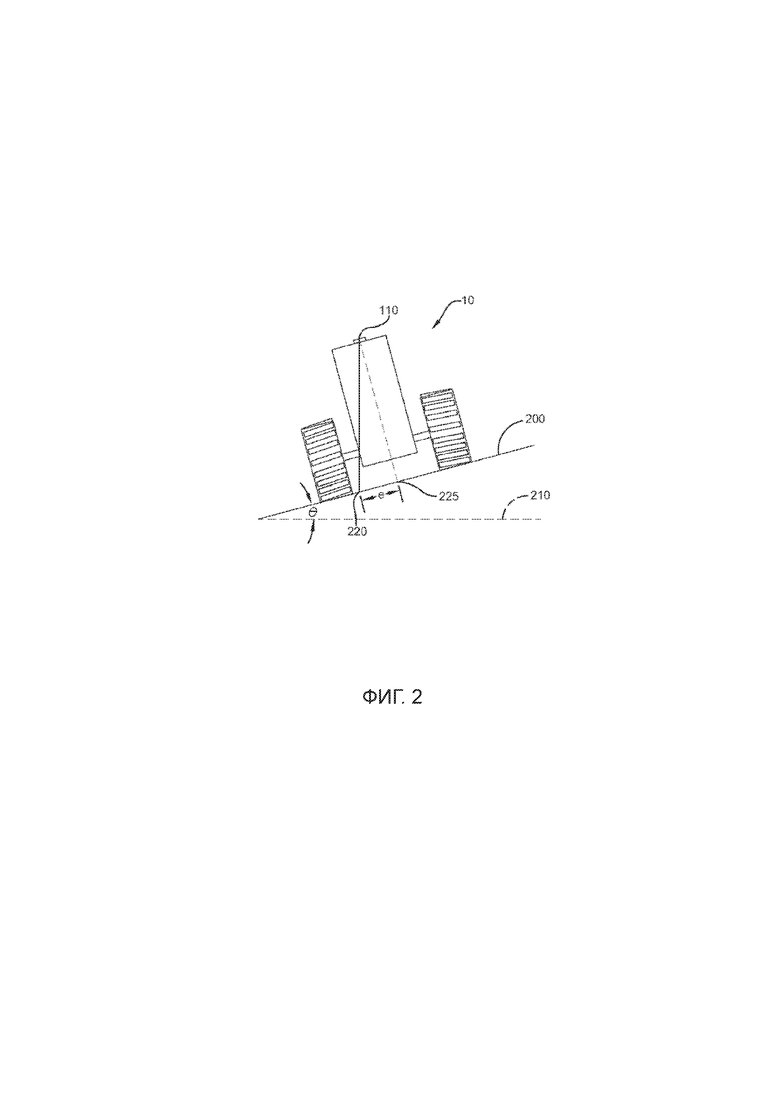
фиг. 2 - схематический вид сзади примерного наземного транспортного средства по фиг. 1A, иллюстрирующий поверхность, на которой расположено наземное транспортное средство;
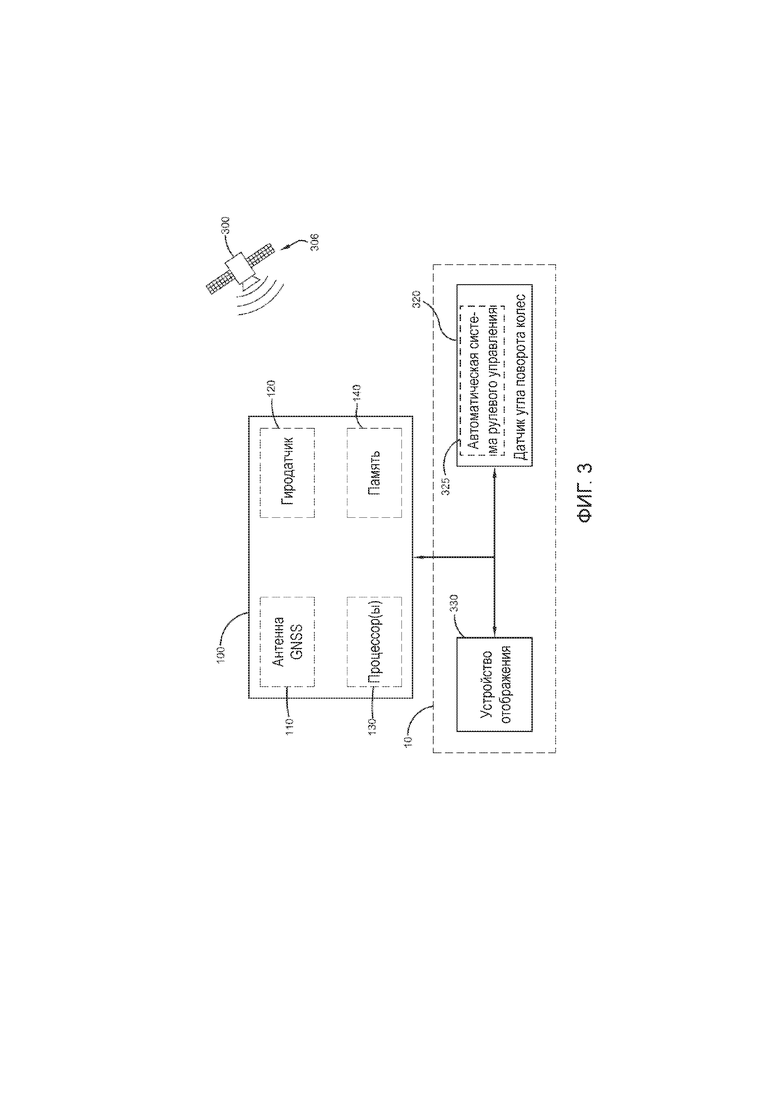
фиг. 3 - функциональная структурная схема примерных наземного транспортного средства и навигационной системы по фиг. 1A; и
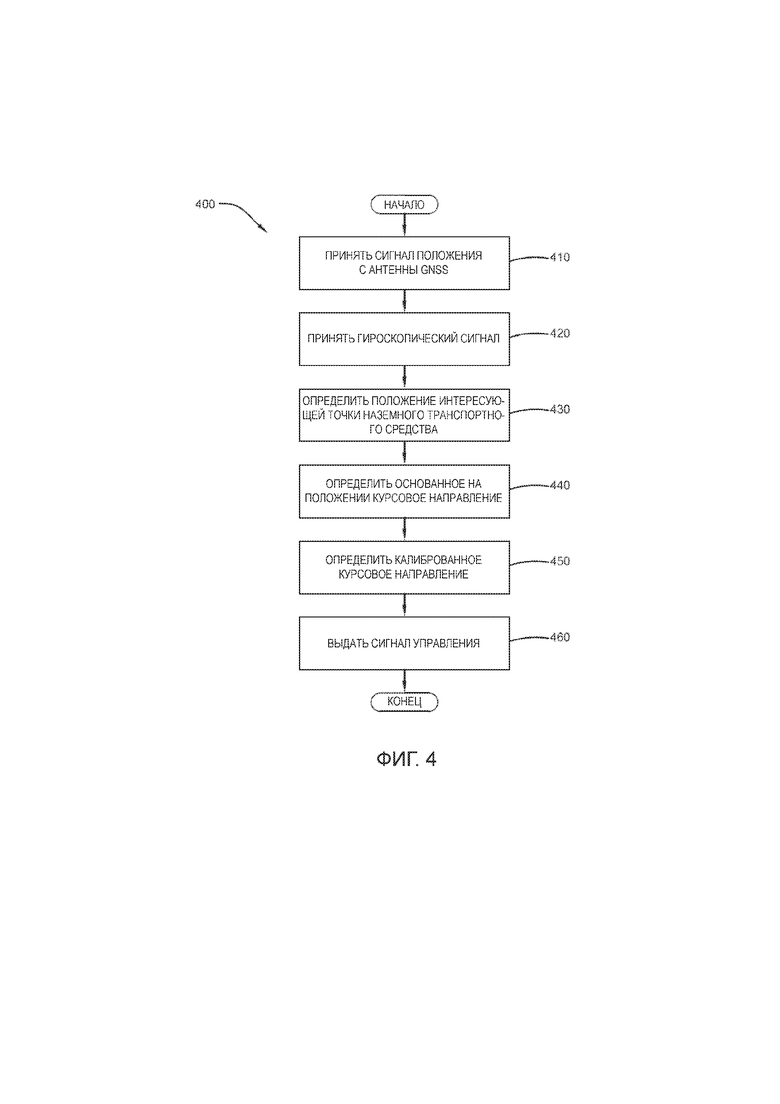
фиг. 4 - блок-схема примерного способа наведения наземного транспортного средства по требуемой траектории движения согласно некоторым реализациям настоящего изобретения.
Осуществление изобретения
Как кратко упомянуто выше, остается потребность в улучшенных навигационных системах и способах навигации для наземного транспортного средства. Исключительно ради примера, в некоторых ситуациях, наземное транспортное средство может включать в себя самоходную часть (такую как трактор) и несамоходную часть (такую как буксируемое приспособление). В таких случаях, оператор может пожелать вести несамоходную часть (или конкретное ее местоположение) по требуемой траектории движения. Типичные навигационные системы будут использовать местоположение, которое определяется приемником GNSS, расположенным на самодвижущейся части, для наведения транспортного средства по требуемой траектории движения. В случае, если такое местоположение приемника отличается от местоположения, интересующего оператора (например, приемник расположен на отдалении от буксируемого приспособления), навигационной системе может не хватать требуемой точности, и реальная траектория движения транспортного средства может отличаться от требуемой траектории движения.
В еще одном другом примере, требуемая траектория движения наземного транспортного средства может проходить по неровной и/или наклонной местности, что может приводить к ошибке или смещению реального местоположения транспортного средства (или интересующей точки на нем) по сравнению с измеренным местоположением приемника GNSS. Исключительно ради примера, оператор трактора, который включает в себя буксируемый посадочный аппарат, может пожелать засеять поле в конкретных местах, к примеру, рядами. Поле может быть ухабистым и неровным, что заставляет трактор подскакивать и раскачиваться по мере того, как он переезжает поле, вызывая изменения угла продольного наклона и угла поперечного наклона транспортного средства. Измеренное местоположение приемника, частично вследствие изменений угла продольного наклона и угла поперечного наклона транспортного средства, сильно отклоняется от реального местоположения буксируемого посадочного аппарата. Это может быть особенно справедливо в обычной ситуации, в которой приемник расположен на приподнятой точке транспортного средства (например, на крыше), а буксируемый элемент находится рядом с или на уровне земли. Таким образом, использование измеренного местоположения приемника на тракторе может давать в результате отклонение от требуемого места посадки растений, приводя к субоптимальному наведению по требуемой траектории движения.
Настоящее изобретение направлено на системы и способы планирования и отслеживания маршрута движения (навигации) наземного транспортного средства, которые принимают меры в ответ на одно или более из ограничений, описанных выше. Точнее, настоящее изобретение направлено на системы и способы наведения наземных транспортных средств, которые принимают меры в ответ на любые расхождения между местоположением приемника, которое измерено, и местоположением интересующей точки на транспортном средстве, например, обусловленным углом продольного наклона, углом поперечного наклона и/или непредвиденными факторами, встречающимися во время перемещения вдоль требуемой траектории движения.
Системы и способы могут включать в себя использование измеренного местоположения приемника GNSS, принятого гироскопического сигнала с одного или более гиродатчиков, прикрепленных к транспортному средству, и взаимного расположения между местоположением приемника и местоположением интересующей точки на транспортном средстве для определения компенсированного положения интересующей точки. Кроме того, компенсированное положение, а также прошлые компенсированные положения могут использоваться для определения реального курсового направления интересующей точки. Компенсированное положение, курсовое направление и требуемая траектория движения могут сравниваться для определения сигнала управления для транспортного средства. Сигнал управления может выдавать сигнал управления ориентацией в автоматическую систему рулевого управления и/или оператору транспортного средства, чтобы содействовать наведению транспортного средства по требуемой траектории движения.
Далее, обращаясь к фиг. 1A и 1B, показано примерное наземное транспортное средство 10, которое включает в себя навигационную систему 100 согласно некоторым реализациям настоящего изобретения. Как упомянуто выше, наземное транспортное средство 10 может принимать любую форму, но проиллюстрировано в виде состоящего из двух частей транспортного средства, которое включает в себя трактор 10A, который буксирует буксируемое приспособление 10B. Навигационная система 100 может включать в себя одну или более антенн 110 глобальной навигационной спутниковой системы («GNSS») и один или более гиродатчиков 120. Как полнее описано ниже, навигационная система 100 может содействовать наведению наземного транспортного средства 10 по требуемой траектории 20 движения.
Далее, обращаясь к фиг. 2, наземное транспортное средство 10 может передвигаться по поверхности 200, такой как просёлочная дорога, поле или другая форма грунта. Поверхность 200 может быть неровной, холмистой и/или иным образом отличной от теоретической плоской поверхности 210. В проиллюстрированном примере по фиг. 2, поверхность 200 показана в качестве наклоненной относительно теоретической плоской поверхности 210 под углом θ. Вследствие отклонения реальной поверхности 200 от теоретической плоской поверхности 210, измеренное положение 220 (которое измеряется датчиком 110 GNSS) будет отличаться от реального положения 225 наземного транспортного средства 100 относительно поверхности 200 на ошибку e. В дополнение или в качестве альтернативы, эта ошибка может быть вызвана углом продольного наклона и/или углом поперечного наклона наземного транспортного средства 10 по мере того как оно перемещается по поверхности 200. Исключительно ради примера, в то время как наземное транспортное средство 10 перемещается по поверхности 200, препятствия (камни, рытвины, и т. д.) могут побуждать транспортное средство 10 наклоняться продольно и/или наклоняться поперечно, тем самым, вынуждая антенну 110 GNSS измерять положение 220, отличное от реального положения 225. Это может быть особенно справедливо в конфигурации, в которой, как обычно, антенна 110 GNSS установлена в самой верхней точке наземного транспортного средства 10, такой как на крыше трактора 10A.
Более того, в дополнение к отклонению измеренного положения 220 от реального положения 225, например, вследствие неровностей поверхности, измеренное положение 220 связано с местоположением антенны 110 GNSS, а не реальной интересующей точки наземного транспортного средства 10. Исключительно ради примера, оператор может намереваться вести интересующую точку 15 (такую как сеялка, которая сеет семена) транспортного средства 10 по требуемой траектории 20 движения (такой как ряд на сельскохозяйственном поле). В случае, если антенна 110 GNSS расположена в первом местоположении (например, на тракторе 10A), а интересующая точка 15 расположена во втором местоположении (например, на буксируемом приспособлении 10B), отличном от первого местоположения, может быть ошибка между требуемой траекторией 20 движения и реальной траекторией движения транспортного средства 10. В случае, если навигационная система 100 использует измеренное положение 220 для наведения наземного транспортного средства 100, вероятно, что положение интересующей точки 15 не будет перемещаться по требуемой траектории 20 движения, например, курсовое направление 17 интересующей точки 15 будет отклоняться от требуемой траектории 20 движения. Исключительно ради примера, и обращаясь к фиг. 1B, чтобы интересующая точка 15 перемещалась по требуемой траектории 20 движения, не исключено, что наземному транспортному средству 10 (например, антенне 110 GNSS) будет необходимо перемещаться по другой траектории 25, и курсовое направление 17 интересующей точки 15 будет отличаться от курсового направления 19 наземного транспортного средства 10 (например, антенны 110 GNSS).
Для обеспечения улучшенных навигационных систем и способа навигации настоящее изобретение описывает слияние функциональных возможностей датчика 110 GNSS и гиродатчика 120 в объединенную навигационную систему 100, которая может использоваться для определения положения и/или курса интересующей точки 15 на наземном транспортном средстве 10. Обращаясь к фиг. 3, примерная навигационная система 100 может включать в себя по меньшей мере одну антенну 110 GNSS, один или более гиродатчиков 120, один или более процессоров 130 и память 140. Навигационная система 100 может использоваться с наземным транспортным средством 10, таким как примеры, описанные выше.
Антенна 110 GNSS может содержать одиночный приемник GNSS, который выполнен с возможностью приёма сигналов 306 с множества спутников 300. На основании сигналов 306, антенна 110 GNSS может выдавать сигнал положения, который указывает пространственное положение антенны 110 GNSS. В качестве альтернативы, антенна 110 GNSS может содержать множество приемников GNSS в системе антенн многоантенной GNSS. В такой системе антенн многоантенной GNSS, антенна 110 GNSS может не только определять пространственное положение и выдавать сигнал положения, также может быть возможно определять курсовое направление и/или ориентацию (угол продольного наклона, угол поперечного наклона, и т. д.). Следует принимать во внимание, что настоящее изобретение может быть равным образом применимо, с учетом необходимых изменений, к любой из одноантенной или многоантенной системы GNSS.
Гиродатчик(и) 120 может быть установлен на или размещен иным образом для измерения различных аспектов наземного транспортного средства 10. Вообще, гиродатчик(и) 120 может выдавать гироскопический сигнал, который указывает угол продольного наклона, угол поперечного наклона и/или основанное на гироскопе курсовое направление (угол рыскания) наземного транспортного средства 10. В одной из реализаций, гиродатчик(и) 120 может выдавать гироскопический сигнал, который указывает: (i) по меньшей мере один из угла продольного наклона и угла поперечного наклона наземного транспортного средства 10, и (ii) основанное на гироскопе курсовое направление.
В некоторых аспектах, гиродатчик 120 может включать в себя гироскоп продольного наклона, гироскоп поперечного наклона, гироскоп рыскания и множество измерителей ускорения. Гироскоп продольного наклона может определять и выдавать сигнал, который указывает угол продольного наклона наземного транспортного средства 10. Подобным образом, гироскоп поперечного наклона может определять и выдавать сигнал, который указывает угол поперечного наклона наземного транспортного средства 10, а гироскоп рыскания может определять и выдавать сигнал, который указывает угол рыскания наземного транспортного средства 10.
Что касается каждого из гироскопов продольного наклона, поперечного наклона и рыскания, один или более датчиков ускорения могут использоваться для калибровки необработанного сигнала, выдаваемого гироскопом. Исключительно ради примера, гироскопы продольного наклона и поперечного наклона могут калиброваться сигналами одного или более измерителей ускорения для определения абсолютного значения для каждого из угла продольного наклона и угла поперечного наклона наземного транспортного средства 10. В некоторых реализациях, однако, гироскоп рыскания будет выдавать сигнал, указывающий изменение угла рыскания транспортного средства 10. В таких реализациях, выходной сигнал гироскопа рыскания не может калиброваться с помощью измерителей ускорения для определения абсолютного значения угла рыскания наземного транспортного средства 10, но взамен может калиброваться, чтобы определять более точное изменение угла рыскания транспортного средства 10, которое может комбинироваться с предыдущим определенным курсовым направлением, как дополнительно описано ниже.
Процессор 130 может быть любой разновидностью схемы, которая запрограммирована выполнять операции. Исключительно ради примера, процессор 130 может быть выполнен с возможностью исполнения команд, которые побуждают процессор 130 выполнять различные операции способов навигации, описанных в материалах настоящей заявки. Термин «процессор» в контексте настоящей заявки, может указывать как на одиночный процессор, так и на множество процессоров, работающих в параллельной или распределенной архитектуре. Процессор 130 также может быть выполнен с возможностью управления функционированием навигационной системы 100, в том числе выполнением/загрузкой операционной системы и осуществлением доступа к памяти 140 или управлением ей. Процессор 130 также может быть выполнен с возможностью выполнения по меньшей мере части операций по настоящему изобретению, которые более подробно описаны ниже.
Память 140 может быть любым пригодным запоминающим носителем (флэш-памятью, жестким диском, и т. д.), который выполнен с возможностью хранения информации. В некоторых реализациях память 140 может иметь вид постоянного машиночитаемого запоминающего носителя, на котором сохранено множество команд. Эти команды при выполнении процессором 130 могут побуждать процессор выполнять одну или более операций навигационных технологий, описанных в материалах настоящей заявки.
В некоторых аспектах, навигационная система 100 может быть соединена с дополнительными компонентами наземного транспортного средства 10 или может иным образом осуществлять связь с ними. Исключительно ради примера и как показано на фиг. 3, навигационная система 100 может быть на связи с автоматической системой 320 рулевого управления, которая может использоваться для наведения наземного транспортного средства 10. В проиллюстрированном примере, автоматическая система 320 рулевого управления включает в себя датчик 325 угла поворота колес, связанный с одним или более управляемых колес транспортного средства 10. В качестве альтернативы или кроме того, навигационная система 100 может быть на связи с устройством 330 отображения в наземном транспортном средстве 10. Устройство 330 отображения, например, может выдавать пользовательский интерфейс водителю наземного транспортного средства 10. Пользовательский интерфейс (не показан) может помогать водителю вести наземное транспортное средство 10 по требуемой траектории движения, например, выдавая последовательность команд (правее, левее, повернуть, и т. д.) пользователю.
Как упомянуто выше, может быть разность или ошибка между пространственным положением, которое измерено антенной 110 GNSS, и реальным положением интересующей точки 15 на наземном транспортном средстве 10. В некоторых аспектах, навигационная система 100 может компенсировать или корректировать эту разность и определять реальное положение интересующей точки 15. Исключительно ради примера, память 140 может хранить взаимное расположение между местоположением («первым местоположением») антенны 110 GNSS и местоположением («вторым местоположением») интересующей точки 15. Взаимное расположение может содержать информацию, относящуюся к смещению (например, направлению и расстоянию) между местоположением антенны 110 GNSS и интересующей точки 15.
В некоторых реализациях, взаимное расположение между местоположением антенны 110 GNSS и интересующей точкой 15 может не быть постоянным, но, взамен, может меняться, в то время как наземное транспортное средство перемещается. Исключительно ради примера, если интересующая точка 15 расположена на приспособлении, которое буксируется (таком как буксируемое приспособление 10b), взаимное расположение между антенной 110 GNSS и интересующей точкой 15 может меняться по мере того, как буксируемое приспособление поворачивается или перемещается относительно антенны 110 GNSS (к примеру, во время поворотов). Чтобы принимать меры в ответ на это изменение взаимного расположения, навигационная система 100 кроме того может включать в себя дополнительный датчик 115, связанный с интересующей точкой 15. Датчик 115 может вырабатывать сигнал смещения, который указывает взаимное расположение между антенной 110 GNSS и интересующей точкой 15. Пример датчика 115 включает в себя, но не в качестве ограничения, дополнительный датчик GNSS, расположенный в интересующей точке 15, следящий датчик (такой как лидар в местоположении антенны 110 GNSS и отражатель в интересующей точке 15), способные определять смещение (расстояние и угол), радарный датчик и радиодатчик.
На основании взаимного расположения, а также сигнала положения, выдаваемого с антенны 110 GNSS, и гироскопического сигнала, выдаваемого гиродатчиком 120, навигационная система 100 может определять реальное пространственное положение интересующей точки 15 на наземном транспортном средстве 10. Реальное положение интересующей точки 15 может определяться относительно поверхности 200, на которой расположено наземное транспортное средство 10, и корректироваться с учетом угла продольного наклона и/или угла поперечного наклона транспортного средства. Таким образом, реальное положение интересующей точки 15 может сравниваться с требуемой траекторией 20 движения, для содействия наведению наземного транспортного средства 10.
Как упомянуто выше, гиродатчик 120 может выдавать гироскопический сигнал, который указывает основанное на гироскопе курсовое направление. Обычно такое основанное на гироскопе курсовое направление указывает на изменение курсового направления наземного транспортного средства 10 в противоположность абсолютному курсовому направлению. Таким образом, в отсутствие начального абсолютного курсового направления, основанное на гироскопе курсовое направление, которое указывает изменения курса, может быть неспособным обеспечить пригодное к использованию курсовое направление для наведения транспортного средства 10.
Более того, в некоторых реализациях антенна 110 GNSS может выдавать основанное на GNSS курсовое направление, которое указывает курсовое направление, которое измерено антенной 110 GNSS. Такое основанное на GNSS курсовое направление, однако, может иметь ограниченную полезность для навигационной системы 110, так как основанное на GNSS курсовое направление имеет отношение к курсовому направлению антенны 110 GNSS, а не интересующей точки 15. Более того, антенна 110 GNSS может быть особенно восприимчива к ошибкам определения основанного на GNSS курсового направления вследствие продольного наклона/поперечного наклона транспортного средства 10, особенно на низких скоростях, и/или в реализациях, где антенна 110 GNSS расположена в самой верхней точке транспортного средства 10 (например, на крыше), которая испытывает наибольшее раскачивание/шатание.
Для того чтобы принять меры в ответ на вышеприведенные проблемы, в некоторых аспектах, навигационная система 100 также может определять основанное на положении курсовое направление интересующей точки 15. Основанное на положении курсовое направление может определяться навигационной системой 100 на основании определенного положения и по меньшей мере одного определенного ранее положения интересующей точки 15. В некоторых аспектах, навигационная система 100 подбирает линию или кривую по множеству пространственных точек, соответствующих текущему положению и одному или более предыдущих положений интересующей точки 15 (например, посредством алгоритма подбора кривой). Кривая затем может продлеваться для прогнозирования основанного на положении курсового направления наземного транспортного средства 10.
Для того чтобы получать более точное курсовое направление наземного транспортного средства 10, навигационная система 100 дополнительно может определять калиброванное курсовое направление на основании комбинации основанного на гироскопе курсового направления и основанного на положении курсового направления. Исключительно ради примера, определенное основанное на положении курсовое направление (которое дает абсолютное курсовое направление) может калиброваться основанным на гироскопе курсовым направлением (которое дает указание изменения курсового направления), чтобы делать возможным более точное курсовое направление для наземного транспортного средства 10. Это потенциально более точное курсовое направление в материалах настоящей заявки будет упоминаться как калиброванное курсовое направление и может использоваться навигационной системой 100, как более полно описано ниже.
Навигационная система 100 дополнительно может определять и выдавать сигнал управления, основанный на положении интересующей точки, калиброванном курсовом направлении и требуемой траектории 20 движения. Сигнал управления может быть выполнен с возможностью использования для содействия наведению наземного транспортного средства 10 по требуемой траектории 20 движения, так чтобы реальное положение интересующей точки 15 находилось на требуемой траектории 20 движения. Таким образом, навигационная система 100 может обеспечивать точное наведение для наземного транспортного средства 10 и, что возможно особенно важно, интересующей точки 15.
В некоторых реализациях, навигационная система 100 может выдавать сигнал управления в автоматическую систему 320 рулевого управления, которая ведет наземное транспортное средство 10 по требуемой траектории 20 движения. В некоторых таких реализациях, навигационная система 100 также может принимать сигнал угла поворота колес с датчика 325 угла поворота колес, связанного с одним или более управляемых колес наземного транспортного средства 10. Сигнал угла поворота колес может указывать угол поворота одного или более управляемых колес, который измеряется датчиком 325 угла поворота колес. Навигационная система 100, в различных аспектах, дополнительно может определять сигнал управления, основанный не только на положении интересующей точки 15, калиброванного курсового направления и требуемой траектории 20 движения, но также на сигнале угла поворота колес.
Кроме того, навигационная система 100 также может определять калиброванный угол одного или более управляемых колес на основании принятого сигнала угла поворота колес и калиброванного курсового направления. По мере того, как наземное транспортное средство 10 перемещается по требуемой траектории 20 движения, навигационная система 100 может определять, что транспортное средство отклоняется от траектории движения некоторым образом, который не ожидается на основании сигнала угла поворота колес. Таким образом, навигационная система 100 может определять ошибку или смещение угла поворота управляемых колес(а) и компенсировать (или калибровать) сигнал угла поворота колес. В таких реализациях, сигнал управления может быть основан на положении интересующей точки 15, калиброванном курсовом направлении, требуемой траектории 20 движения и калиброванном угле (в противоположность необработанному сигналу угла поворота колес).
В других или дополнительных вариантах осуществления, сигнал управления может выдаваться на устройство 330 отображения в наземном транспортном средстве 10, чтобы помогать водителю (не показан) вести наземное транспортное средство 10 по требуемой траектории 20 движения. Как упомянуто выше, устройство 330 отображения, например, может выдавать пользовательский интерфейс водителю наземного транспортного средства 10. Пользовательский интерфейс (не показан) может помогать водителю вести наземное транспортное средство 10 по требуемой траектории движения, например, выдавая последовательность команд (правее, левее, повернуть, и т. д.) пользователю. Следует принимать во внимание, что пользовательский интерфейс может принимать любую форму, которая содействует водителю в наведении наземного транспортного средства 10.
Как упомянуто выше, в некоторых реализациях, навигационная система 100 может включать в себя систему 110 антенн многоантенной GNSS, которая может определять основанное на GNSS курсовое направление. В таких реализациях, навигационная система 100 может использовать основанное на GNSS курсовое направление для калибровки основанного на гироскопе курсового направления, принятого с гиродатчика 120. Исключительно ради примера, когда наземное транспортное средство 10 инициализировано в первый раз и еще не начало движение, может не быть возможным определять основанное на положении курсовое направление, так как нет определенного ранее положения интересующей точки 15. Однако, если транспортное средство 10 включает в себя систему 110 антенн многоантенной GNSS, может определяться начальное основанное на GNSS курсовое направление. Начальное основанное на GNSS курсовое направление может использоваться для калибровки основанного на гироскопе курсового направления, которое, как упомянуто выше, может указывать только изменения курсового направления (угла рыскания) транспортного средства 10.
В дополнительных реализациях, может быть желательно дополнительно интегрировать калиброванное курсовое направление (которое определяется навигационной системой 100), чтобы калибровать, корректировать или превосходить по качеству эксплуатационные характеристики гиродатчика 120. Исключительно ради примера, и как упомянуто выше, навигационная система 100 может определять основанное на положении курсовое направление интересующей точки 15 транспортного средства 10 на основании текущего и предыдущих положений интересующей точки 15. Кроме того, основанное на гироскопе курсовое направление также может комбинироваться или иным образом использоваться для калибровки основанного на положении курсового направления интересующей точки 15. В этих реализациях, калиброванное курсовое направление затем может использоваться для калибровки основанного на гироскопе курсового направления, чтобы получать калиброванное основанное на гироскопе курсовое направление. Таким образом, навигационная система 100 может рекурсивно оптимизировать свои определения положения и/или курсового направления интересующей точки 15.
В качестве примера, определение положения интересующей точки 15 транспортного средства 10 может быть основано на сигнале положения (с антенны 110 GNSS), взаимном расположении между положениями антенны 110 GNSS и интересующей точки 15, и калиброванном основанном на гироскопе курсовом направлении (в противоположность необработанному основанному на гироскопе курсовому направлению, определенному из гироскопического сигнала). Следует принимать во внимание, что, в реализациях, где взаимное расположение может меняться (к примеру, в тех, в которых интересующая точка 15 расположена на буксируемом приспособлении), определение положения интересующей точки 15 дополнительно может быть основано на сигнале смещения, принятом с датчика 115, связанного с интересующей точкой 15, как описано выше. Этот процесс с обратной связью может давать более точное определение положения и курсового направления интересующей точки 15.
Возможно, что наземное транспортное средство 10 начинать движение и останавливаться по мере того, как транспортное средство движется по требуемой траектории 20 движения. Когда транспортное средство 10 прекращает движение, следует принимать во внимание, что реальное курсовое направление транспортного средства 100 не будет изменяться, так как наземное транспортное средство 10 может быть неспособным поворачиваться на поверхности 200 без движения. Однако, вследствие различных факторов (дрейфа датчиков, вибрации, обусловленной холостым ходом двигателя, и т. д.), сигнал положения и/или основанное на GNSS курсовое направление с антенны 110 GNSS и/или гироскопический сигнал с гиродатчика 120 могут показывать ошибочные курсовые направления наземного транспортного средства 10.
Для того чтобы принимать меры в ответ на эти ошибки, навигационная система 100 может «фиксировать» или иным образом сохранять определенное ранее курсовое направление в качестве текущего курсового направления несмотря ни на какие сигналы с антенны 110 GNSS и/или гиродатчика 120. Исключительно ради примера, когда наземное транспортное средство 10 останавливается в момент остановки, навигационная система 100 может сохранять основанное на гироскопе курсовое направление в момент остановки в качестве сохранённого основанного на гироскопе курсового направления. Затем, когда наземное транспортное средство 10 вновь начинает движение в момент начала движения после момента остановки, навигационная система 100 может инициализировать основанное на гироскопе курсовое направление в качестве сохранённого основанного на гироскопе курсового направления. Таким образом, навигационная система 100 может компенсировать дрейф в гиродатчике 120. В еще одном примере, навигационная система 100, к тому же или в качестве альтернативы, может игнорировать изменения сигнала положения и/или основанного на GNSS курсового направления с антенны 110 GNSS, в то время как транспортное средство 10 не движется (например, когда скорость транспортного средства равна нулю). Таким образом, основанное на положении курсовое направление будет оставаться постоянным, в то время как транспортное средство 10 остановлено. Это также может давать дополнительное преимущество устранения необходимости в дорогостоящем (в вычислительном или ином смысле) фильтре для устранения шума (такого как вибрация) из сигнала положения и сигнала, основанного на GNSS курсового направления.
Навигационная система 100, к тому же, согласно некоторым аспектам, может определять пройденное расстояние и/или скорость наземного транспортного средства 10 относительно земли на основании определенных положений, описанных выше. Исключительно ради примера, навигационная система 100, например, может сохранять множество определенных положений интересующей точки 15 в памяти 140. Каждое из определенных положений может иметь связанную с ним временную метку или другую информацию, которая указывает истекшее время между различными положениями. Навигационная система 100 может определять пройденное расстояние, рассчитывая расстояние между определенными положениями. Например, для того чтобы рассчитывать скорость относительно земли, навигационная система 100 может делить пройденное расстояние на истекшее время. Следует принимать во внимание, что навигационная система 100 может использовать любой период времени для расчета точной скорости транспортного средства 10 относительно земли, например, навигационная система 100 могла бы определять «текущую» скорость транспортного средства 10 относительно земли, используя два или более определенных в последнее время положений, и/или «среднюю» скорость относительно земли за данный период времени.
Блок-схема, детализирующая примерный способ 400 наведения наземного транспортного средства 10 по требуемой траектории 20 движения, проиллюстрирована на фиг. 4. Способ 400 будет описан в контексте наземного транспортного средства 10 и навигационной системы 100, описанных выше. На 410, навигационная система 100 может принимать сигнал положения с антенны 110 глобальной навигационной спутниковой системы (GNSS), установленной в первом местоположении на наземном транспортном средстве 10. Как упомянуто выше, сигнал положения может указывать пространственное положение антенны 110 GNSS в качестве указываемого из GNSS (например, с помощью спутника(ов) 300). Кроме того, навигационная система 100 может принимать гироскопический сигнал с гиродатчика 120, который указывает: (i) по меньшей мере один из угла продольного наклона и угла поперечного наклона наземного транспортного средства 10, и (ii) основанное на гироскопе курсовое направление на 420.
Навигационная система 100 также может сохранять (например, в памяти 140) взаимное расположение между местоположением антенны 110 GNSS и интересующей точкой 15 на наземном транспортном средстве 10. На 430, навигационная система 100 может определять положение интересующей точки 15 наземного транспортного средства 10 во втором местоположении, ином чем первое местоположение, на основании сигнала положения, гироскопического сигнала и взаимного расположения между первым местоположением и вторым местоположением. Положение интересующей точки 15 наземного транспортного средства 10 может определяться относительно поверхности 100, на которой расположено наземное транспортное средство, и корректироваться с учетом по меньшей мере одного из угла продольного наклона и угла поперечного наклона наземного транспортного средства 10.
Более того, навигационная система 100 может определять основанное на положении курсовое направление интересующей точки 15 наземного транспортного средства 10 на основании определенного положения и по меньшей мере одного определенного ранее положения интересующей точки 15 (на 440). На основании комбинации основанного на гироскопе курсового направления и основанного на положении курсового направления, на 450, навигационная система 100 может определять калиброванное курсовое направление. На 460, навигационная система 100 может выдавать сигнал управления на основании положения интересующей точки 15, калиброванного курсового направления и требуемой траектории 20 движения. Сигнал управления может быть выполнен с возможностью использования для содействия наведению наземного транспортного средства 10, так чтобы положение интересующей точки 15 находилось на требуемой траектории 20 движения. Как описано выше, сигнал управления, например, может выдаваться в автоматическую систему 320 рулевого управления или на устройство 330 отображения в наземном транспортном средстве 10. Способ 400 может заканчиваться или возвращаться на 410.
Примерные варианты осуществления приведены так, что это описание изобретения будет всесторонним и будет полностью выражать объем специалистам в данной области техники. Изложены многочисленные конкретные детали, такие как примеры характерных компонентов, устройств и способов, для обеспечения всестороннего понимания вариантов осуществления настоящего изобретения. Специалистам в данной области техники будет очевидно, что конкретные подробности не должны применяться обязательно, что примерные варианты осуществления могут быть реализованы во множестве различных форм, и что ни один не должен толковаться ограничивающим объем изобретения. В некоторых примерных вариантах осуществления, широко известные процедуры, широко известные конструкции устройств и широко известные технологии не описаны подробно.
Терминология, используемая в материалах настоящей заявки, предназначена только для целей описания конкретных примерных вариантов осуществления и не подразумевается ограничивающей. В контексте настоящей заявки формы единственного числа также могут подразумеваться включающими в себя формы множественного числа, если контекст явным образом не указывает иное. Термин «и/или» включает в себя любое и все сочетания одной или более из связанных перечисленных позиций. Термины «содержит», «содержащий», «включающий в себя» и «имеющий» являются неисключающими, то есть определяют наличие изложенных признаков, целых частей, этапов, операций, элементов и/или компонентов, но не исключают наличия или добавления одного или более других признаков, целых частей, этапов, операций, элементов, компонентов и/или их групп. Этапы способа, процессы и операции, описанные в материалах настоящей заявки, не должны толковаться в качестве обязательно требующих своего функционирования в конкретном описанном или проиллюстрированном порядке, если не установлен конкретный порядок функционирования. Также следует понимать, что могут быть применены дополнительные или альтернативные этапы.
Хотя термины первый, второй, третий и т. д. могут использоваться в материалах настоящей заявки для описания различных элементов, компонентов, областей, уровней и/или участков, эти элементы, компоненты, области, уровни и/или участки не должны ограничиваться этими терминами. Эти термины могут использоваться только для проведения различия одного элемента, компонента, области, уровня или участка от другой области, уровня или участка. Термины, такие как «первый», «второй» и другие числительные в контексте настоящей заявки не подразумевают последовательность или порядок, если это явно не указано контекстом. Таким образом, первые элемент, компонент, область, уровень или участок, описанные ниже, могут быть названы вторыми элементом, компонентом, областью, уровнем или участком, не отходя от содержания примерных вариантов осуществления.
Технологии, описанные в материалах настоящей заявки, могут быть реализованы одной или более компьютерных программ, исполняемых одним или более процессоров. Компьютерные программы включают в себя исполняемые процессором команды, которые хранятся на постоянном материальном машиночитаемом носителе. Компьютерные программы также могут включать в себя сохранённые данные. Неограничивающими примерами постоянного материального машиночитаемого носителя являются энергонезависимая память, магнитное запоминающее устройство и оптическое запоминающее устройство.
Некоторые части вышеприведенного описания представляют технологии, описанные в материалах настоящей заявки, в терминах алгоритмов и символических представлений операций над информацией. Эти алгоритмические описания и представления являются средством, используемым специалистами в области техники обработки данных для наиболее эффективной передачи сути их работы другим специалистам в данной области техники. Понятно, что эти операции, несмотря на то, что описаны функционально и логически, должны реализовываться компьютерными программами. Более того, иногда также оказалось удобным называть эти структуры операций модулями или по их функциональным наименованиям без потери универсальности.
Если конкретно не указано иное, как очевидно из вышеприведенного описания, следует понимать, что во всём описании использование таких терминов, как «обработка» или «вычисление», или «расчет», или «определение», или «отображение» или тому подобных, указывают на действия и процессы компьютерной системы или подобного электронного вычислительного устройства, которое манипулирует и преобразует данные, представленные в виде физических (электронных) величин в памяти или регистрах компьютерной системы, либо в других устройствах хранения, передачи или отображения такой информации.
Некоторые аспекты описанных технологий включают в себя этапы и команды, описанные в материалах настоящей заявки в виде алгоритма. Следует отметить, что описанные этапы и команды процесса могут быть реализованы в программном обеспечении, микропрограммном обеспечении или в аппаратных средствах и, когда они реализованы в программном обеспечении, они могут быть загружены, чтобы находиться на различных платформах, используемых в сетевых операционных системах реального времени и могут выполняться с них.
Настоящее изобретение также относится к устройству для выполнения операций в нем. Это устройство может быть сконструировано специально для требуемых целей, или оно может содержать компьютер общего применения, избирательно введенный в действие или реконфигурированный компьютерной программой, сохранённой на машиночитаемом носителе, к которому осуществляется доступ компьютером. Такая компьютерная программа может храниться на материальном машиночитаемом запоминающем носителе, таком как, но не в качестве ограничения, любой тип диска, в том числе гибкие диски, оптические диски, CD-ROM, магнитооптические диски, постоянные запоминающие устройства (ROM), оперативные запоминающие устройства (RAM), стираемые программируемые постоянные запоминающие устройства (EPROM), электрически стираемые программируемые постоянные запоминающие устройства (EEPROM), магнитные или оптические карты, специализированные интегральные схемы (ASIC), программируемые пользователем вентильные матрицы (FPGA) или любые другие типы носителей, пригодных для хранения электронных команд, и каждый из которых соединен с системной шиной компьютера. Более того, компьютеры, упомянутые в описании изобретения, могут включать в себя одиночный процессор или могут быть архитектурами, применяющими многопроцессорные исполнения ради повышенных вычислительных возможностей.
Алгоритмы и операции, представленные в материалах настоящей заявки, по существу не связаны с каким-либо конкретным компьютером или другим устройством. Различные системы общего назначения также могут использоваться с программами в соответствии с замыслом настоящей заявки, или может оказаться удобным конструировать в большей степени специализированные устройства для выполнения требуемых этапов способа. Требуемая конструкция для многообразия этих систем будет очевидна специалистам в данной области техники наряду с эквивалентными вариантами. Кроме того, настоящее изобретение не описано со ссылкой на какой-либо конкретный язык программирования. Следует понимать, что для реализации замысла настоящего изобретения, как описано в материалах настоящей заявки, могут использоваться различные языки программирования, и любые упоминания конкретных языков приведены для раскрытия возможности реализации изобретения и наилучшего варианта настоящего изобретения.
Настоящее изобретение хорошо приспособлено к широкому многообразию компьютерных сетевых систем с многочисленными топологиями. В данной области техники конфигурирование и управление большими сетями содержат запоминающие устройства и компьютеры, которые с возможностью обмена информацией соединены с различными компьютерами и запоминающими устройствами по сети, такой как сеть Интернет.
Вышеприведённое описание вариантов осуществления было приведено в целях иллюстрации и описания. Оно не подразумевается исчерпывающим или ограничивающим изобретение. Отдельные элементы или признаки конкретного варианта осуществления в общем случае не ограничены таким конкретным вариантом осуществления, но там, где применимо, являются взаимозаменяемыми и могут использоваться в выбранном варианте осуществления, даже если это конкретно не показано и не описано. Он также может быть изменен многими способами. Такие изменения не должны рассматриваться в качестве отступления от сущности изобретения, и все такие модификации подразумеваются включенными в объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения траектории объекта в окружающем пространстве для построения 3D карты | 2024 |
|
RU2830723C1 |
| Способ комплексирования разнородной навигационной информации для позиционирования наземного транспортного средства | 2021 |
|
RU2769440C1 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА БАЗЕ GNSS-INS С ИСПОЛЬЗОВАНИЕМ ОДИНОЧНОЙ АНТЕННЫ | 2016 |
|
RU2662462C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ КАЛИБРОВКИ СЕНСОРОВ КОЛЕСНОЙ ОДОМЕТРИИ | 2023 |
|
RU2821391C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| Система захода и посадки на взлётно-посадочную полосу воздушного судна с бортовой РЛС | 2019 |
|
RU2728208C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
Группа изобретений относится к способу наведения наземного транспортного средства по требуемой траектории движения и навигационной системе транспортного средства. Для наведения транспортного средства принимают сигнал глобальной навигационной спутниковой системы (GNSS), указывающий положение антенны, установленной в первом местоположении транспортного средства, принимают гироскопический сигнал с гиродатчика, определяют положение интересующей точки наземного транспортного средства во втором местоположении, отличном от первого определенным образом, определяют основанное на положении курсовое направление интересующей точки на основе определенных ранее данных, определяют калиброванное курсовое направление на основании курсовых направлений, определенных с помощью гироскопа, и курсового направления, основанного на положении, выдают сигнал управления. Навигационная система содержит один или более процессоров, постоянный машиночитаемый запоминающий носитель, на котором записаны инструкции для выполнения способа. Обеспечивается повышение точности наведения наземного транспортного средства для движения по заданной траектории. 2 н. и 18 з.п. ф-лы, 5 ил.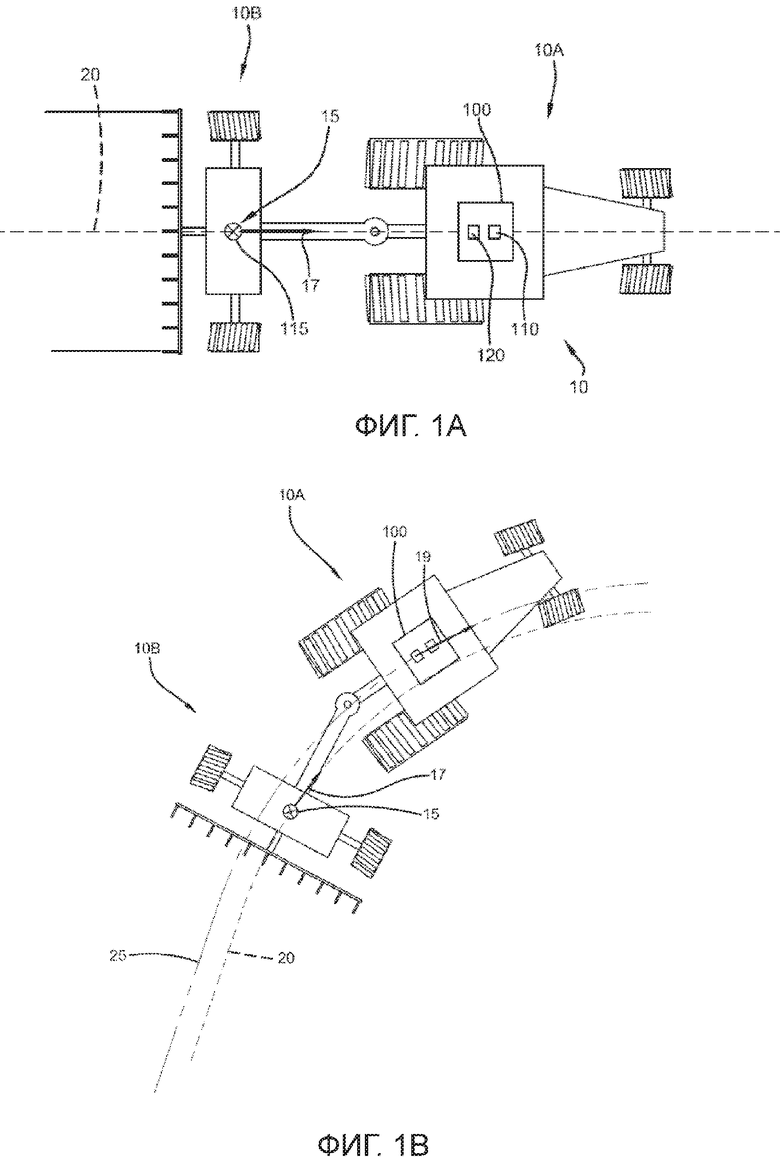
1. Способ наведения наземного транспортного средства по требуемой траектории движения, содержащий этапы, на которых:
принимают сигнал положения с антенны глобальной навигационной спутниковой системы (GNSS), установленной в первом местоположении на наземном транспортном средстве, причём сигнал положения указывает пространственное положение антенны GNSS в качестве указываемого посредством GNSS;
принимают гироскопический сигнал с гиродатчика, гироскопический сигнал указывает: (i) по меньшей мере одно из угла продольного наклона и угла поперечного наклона наземного транспортного средства и (ii) основанное на гироскопе курсовое направление;
определяют положение интересующей точки наземного транспортного средства во втором местоположении, отличном от первого местоположения, на основании сигнала положения, гироскопического сигнала и взаимного расположения между первым местоположением и вторым местоположением, причём положение интересующей точки наземного транспортного средства определяется относительно поверхности, на которой расположено наземное транспортное средство, и корректируется с учетом по меньшей мере одного из угла продольного наклона и угла поперечного наклона наземного транспортного средства;
определяют основанное на положении курсовое направление интересующей точки наземного транспортного средства на основании определенного положения интересующей точки и по меньшей мере одного определенного ранее положения интересующей точки;
определяют калиброванное курсовое направление на основании сочетания основанного на гироскопе курсового направления и основанного на положении курсового направления и
выдают сигнал управления на основании положения интересующей точки, калиброванного курсового направления и требуемой траектории движения, причём сигнал управления выполнен с возможностью использования для содействия наведению наземного транспортного средства таким образом, чтобы положение интересующей точки находилось на требуемой траектории движения.
2. Способ по п. 1, в котором сигнал управления выдается в автоматическую систему рулевого управления, которая ведет наземное транспортное средство по требуемой траектории движения.
3. Способ по п. 2, дополнительно содержащий этап, на котором:
принимают сигнал угла поворота колес с датчика угла поворота колес, связанного с одним или более управляемыми колесами наземного транспортного средства, причём сигнал угла поворота колес указывает угол одного или более управляемых колес,
при этом сигнал управления дополнительно основан на сигнале угла поворота колес.
4. Способ по п. 3, дополнительно содержащий этап, на котором:
определяют калиброванный угол одного или более управляемых колес на основании принятого сигнала угла поворота колес и калиброванного курсового направления,
при этом сигнал управления, дополнительно основанный на сигнале угла поворота колес, содержит сигнал управления, дополнительно основанный на калиброванном угле.
5. Способ по п. 1, дополнительно содержащий этап, на котором принимают сигнал смещения с датчика, связанного с интересующей точкой, причём сигнал смещения указывает взаимное расположение между первым местоположением и вторым местоположением, при этом определение положения интересующей точки наземного транспортного средства дополнительно основано на сигнале смещения.
6. Способ по п. 1, в котором гиродатчик содержит гироскоп поперечного наклона, гироскоп продольного наклона, гироскоп рыскания и множество измерителей ускорения, при этом множество измерителей ускорения используется для калибровки гироскопа поперечного наклона и гироскопа продольного наклона таким образом, чтобы гироскопический сигнал указывал угол продольного наклона и угол поперечного наклона наземного транспортного средства.
7. Способ по п. 6, в котором:
антенна GNSS содержит систему антенн многоантенной GNSS, которая определяет начальное основанное на GNSS курсовое направление, и
способ дополнительно содержит этап, на котором, когда наземное транспортное средство начинает движение в начальный момент времени, калибруют основанное на гироскопе курсовое направление, указываемое гироскопом рыскания, на основании начального основанного на GNSS курсового направления.
8. Способ по п. 1, дополнительно содержащий этап, на котором калибруют основанное на гироскопе курсовое направление на основании калиброванного курсового направления для получения калиброванного основанного на гироскопе курсового направления, при этом определение положения интересующей точки на основании сигнала положения, гироскопического сигнала и взаимного расположения между первым местоположением и вторым местоположением содержит этап, на котором определяют положение интересующей точки на основании сигнала положения, калиброванного основанного на гироскопе курсового направления и взаимного расположения между первым местоположением и вторым местоположением.
9. Способ по п. 1, дополнительно содержащий этапы, на которых:
когда наземное транспортное средство останавливается в момент остановки, сохраняют основанное на гироскопе курсовое направление в момент остановки в качестве сохранённого основанного на гироскопе курсового направления; и
когда наземное транспортное средство вновь начинает движение в момент начала движения после времени остановки, инициализируют основанное на гироскопе курсовое направление в качестве сохранённого основанного на гироскопе курсового направления для компенсации дрейфа гиродатчика.
10. Способ по п. 1, дополнительно содержащий этап, на котором определяют скорость относительно земли интересующей точки на основании множества определенных положений интересующей точки наземного транспортного средства.
11. Навигационная система для наземного транспортного средства, содержащая:
один или более процессоров и
постоянный машиночитаемый запоминающий носитель, на котором сохранено множество команд, которые при выполнении одним или более процессорами побуждают один или более процессоров выполнять операции, содержащие:
прием сигнала положения с антенны глобальной навигационной спутниковой системы (GNSS), установленной в первом местоположении на наземном транспортном средстве, причём сигнал положения указывает пространственное положение антенны GNSS в качестве указываемого посредством GNSS;
прием гироскопического сигнала с гиродатчика, гироскопический сигнал указывает: (i) по меньшей мере одно из угла продольного наклона и угла поперечного наклона наземного транспортного средства, и (ii) основанное на гироскопе курсовое направление;
определение положения интересующей точки наземного транспортного средства во втором местоположении, отличном от первого местоположения, на основании сигнала положения, гироскопического сигнала и взаимного расположения между первым местоположением и вторым местоположением, причём положение интересующей точки наземного транспортного средства определяется относительно поверхности, на которой расположено наземное транспортное средство, и корректируется с учетом по меньшей мере одного из угла продольного наклона и угла поперечного наклона наземного транспортного средства;
определение основанного на положении курсового направления интересующей точки наземного транспортного средства на основании определенного положения интересующей точки и по меньшей мере одного определенного ранее положения интересующей точки;
определение калиброванного курсового направления на основании сочетания основанного на гироскопе курсового направления и основанного на положении курсового направления; и
выдачу сигнала управления на основании положения интересующей точки, калиброванного курсового направления и требуемой траектории движения, причём сигнал управления выполнен с возможностью использования для содействия наведению наземного транспортного средства таким образом, чтобы положение интересующей точки находилось на требуемой траектории движения.
12. Навигационная система по п. 11, в которой сигнал управления выдается в автоматическую систему рулевого управления, которая ведет наземное транспортное средство по требуемой траектории движения.
13. Навигационная система по п. 12, в которой операции дополнительно содержат:
прием сигнала угла поворота колес с датчика угла поворота колес, связанного с одним или более управляемых колес наземного транспортного средства, причём сигнал угла поворота колес указывает угол одного или более управляемых колес,
при этом сигнал управления дополнительно основан на сигнале угла поворота колес.
14. Навигационная система по п. 13, в которой операции дополнительно содержат:
определение калиброванного угла одного или более управляемых колес на основании принятого сигнала угла поворота колес и калиброванного курсового направления,
при этом сигнал управления, дополнительно основанный на сигнале угла поворота колес, содержит сигнал управления, дополнительно основанный на калиброванном угле.
15. Навигационная система по п. 11, в которой операции дополнительно содержат прием сигнала смещения с датчика, связанного с интересующей точкой, сигнал смещения указывает взаимное расположение между первым местоположением и вторым местоположением, при этом определение положения интересующей точки наземного транспортного средства дополнительно основано на сигнале смещения.
16. Навигационная система по п. 11, в которой гиродатчик содержит гироскоп поперечного наклона, гироскоп продольного наклона, гироскоп рыскания и множество измерителей ускорения, при этом множество измерителей ускорения используется для калибровки гироскопа поперечного наклона и гироскопа продольного наклона таким образом, чтобы гироскопический сигнал указывал угол продольного наклона и угол поперечного наклона наземного транспортного средства.
17. Навигационная система по п. 16, в которой:
антенна GNSS содержит систему антенн многоантенной GNSS, которая определяет начальное основанное на GNSS курсовое направление, и
операции дополнительно содержат, когда наземное транспортное средство начинает движение в начальный момент времени, калибровку основанного на гироскопе курсового направления, указываемого гироскопом рыскания, на основании начального основанного на GNSS курсового направления.
18. Навигационная система по п. 11, в которой операции дополнительно содержат калибровку основанного на гироскопе курсового направления на основании калиброванного курсового направления для получения калиброванного основанного на гироскопе курсового направления, при этом определение положения интересующей точки на основании сигнала положения, гироскопического сигнала и взаимного расположения между первым местоположением и вторым расположением содержит определение положения интересующей точки на основании сигнала положения, калиброванного основанного на гироскопе курсового направления и взаимного расположения между первым местоположением и вторым местоположением.
19. Навигационная система по п. 11, в которой операции дополнительно содержат:
когда наземное транспортное средство останавливается в момент остановки, сохранение основанного на гироскопе курсового направления в момент остановки в качестве сохранённого основанного на гироскопе курсового направления; и
когда наземное транспортное средство вновь начинает движение в момент начала движения после момента остановки, инициализацию основанного на гироскопе курсового направления в качестве сохранённого основанного на гироскопе курсового направления для компенсации дрейфа гиродатчика.
20. Навигационная система по п. 11, в которой операции дополнительно содержат определение скорости относительно земли интересующей точки на основании множества определенных положений интересующей точки наземного транспортного средства.
| КОМПЕНСАЦИОННАЯ СИСТЕМА СИСТЕМЫ КООРДИНАТ СУХОПУТНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2331847C2 |
| US 6539303 B2, 25.03.2003 | |||
| WO 2010005945 A1, 14.01.2010 | |||
| US 5928309 A1, 27.07.1999. | |||

