Область техники
Изобретение относится к авиационной технике, а именно, к выдвижным самолетным платформам и может быть использовано для летных испытаний оптоэлектронных систем.
Уровень техники
Известно устройство-платформа с контейнером оборудованным радаром, датчиками обнаружения целей, аппаратурой фотографирования и определения координат целей, размещенная на транспортном самолете Lockheed С-130, патент US №5927648, 27.07.1999 г. B64C 7/00.
Однако, в процессе выдвижения в полете контейнера с аппаратурой требуется открытие двери грузового отсека, что приводит к его разгерметизации, что и ограничивает высоту полета самолета по условиям жизнеобеспечения операторов платформы и экипажа самолета;
- контейнер с аппаратурой, напрямую не связанный с наиболее жесткими частями самолета (центроплан, грузовая рампа) и находящийся в непосредственно в потоке, подвергающийся большим аэродинамическим нагрузкам, испытывает повышенный уровень вибраций по сравнению с устройством, закрепленным на грузовой рампе и находящимся в аэродинамической тени створок грузового люка.
Известна система - платформа выдвижная с оптоэлектронным устройством на самолете для дистанционного обнаружения целей, включающая раму, винтовой механизм выдвижения с электроприводом, две направляющие колонки, защитные створки для оптики. Оптоэлектронное устройство закреплено на подвижной платформе и перемещается из убранного положения в выдвинутое и обратно. При этом в убранном положении датчик закрывается защитными створками с помощью отдельного электропривода, патент US №9493229, 15.11.2016 г., B64D 47/02.
Однако, в этой системе - платформе, наиболее близкой к предлагаемой, вследствие указанного размещения на винтовом приводе платформы, не связанной непосредственно с жесткими частями каркаса самолета, возникает самовозбуждение вибрации от прямого воздействия воздушного потока, что препятствует повышению точности измерений оптоэлектронного датчика, а также требует отдельного сложного устройства защиты оптики от разлетающихся частиц при взлете-посадке в виде створок с отдельным электропроводом.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в расширении углов обзора контролируемого пространства, повышении надежности работы, повышении устойчивости и точности измерений и целеуказания, повышении эксплуатационной стойкости при установке на самолет, имеющий грузовую рампу и створки хвостового отсека, выдвижной платформы для летных испытаний оптоэлектронных систем.
Существенные признаки.
Для достижения технического результата в платформе выдвижной для летных испытаний оптоэлектронных систем при установке на самолет, имеющий грузовую рампу и створки хвостового отсека, содержащей механизм выдвижения с приводом, оптоэлектронное устройство, закрепленное на подвижной платформе, перемещаемой из убранного положения в выдвинутое и обратно, дополнительно введены выдвижной моноблок, состоящий из этажерки приборной с оптоэлектронными системами, включая элементы подсистем, обеспечивающих работоспособность оптоэлектронных систем, силового кожуха - прямой призматической формы, с наклонной стойкой, размещенной в задней зоне верхней поверхности силового кожуха моноблока, и с кронштейнами подвески, со скругленной передней гранью с клиновыми упорами для фиксации моноблока в нижнем - рабочем положении и фиксирующим зубом с помощью замка для фиксации моноблока в верхнем-транспортном положении. Механизм выдвижения выполнен в виде механизма параллелограммного типа, связанного с гидроприводом для вертикального выдвижения моноблока, содержит стойку, установленную на торце грузовой рампы, выполненную с кронштейнами для установки клиновых пазов внизу стойки, гидроцилиндр, систему рычагов подвески, состоящую из рычага-подвеса и рычага-стабилизатора. Рычаг-подвес установлен под рычагом-стабилизатором, кронштейны рычага-подвеса в количестве двух штук шарнирно соединены с кронштейнами, установленными в средней части стойки. Два других кронштейна рычага-подвеса со стороны моноблока шарнирно соединены с двумя кронштейнами на верхней поверхности силового кожуха моноблока. Два кронштейна рычага-стабилизатора со стороны стойки шарнирно соединены с кронштейнами, установленными на верхней части стойки, кронштейны рычага-стабилизатора со стороны моноблока шарнирно соединены с кронштейнами на наклонной стойке. Действующие длины рычага-подвеса и рычага-стабилизатора равны, а центры шарниров рычага подвеса и рычага-стабилизатора находятся соответственно на одной вертикали, как на стойке, так и на моноблоке. При этом выполняются условия работы параллелограммного рычажного механизма и обеспечивается, таким образом, плоско-параллельное вертикальное перемещение моноблока.
Исполнительный гидроцилиндр гидропривода соединен кронштейном на стойке и с кронштейном на рычаге-подвесе и подключен через трубопроводы к гидропульту с ручным гидронасосом, распределительной арматурой и контрольными приборами, и гидронасосной станции. Кроме того, элементы подсистем, обеспечивающие работоспособность оптоэлектронных систем, содержат: систему термостатирования, включающую установленные в гермоотсеке панель управления вентиляторами, подключенную к трем вентиляторам для подачи воздуха из грузоотсека в блоки оптоэлектронной системы через коллектор с обратными клапанами, шланг, проходящий через гермоввод из герметичного грузового отсека в негерметичный хвостовой и входящий через подвижный угловой проходник на силовом кожухе в коллектор, находящийся внутри моноблока. Внутренний коллектор связан гибкими трубопроводами с блоками оптоэлектронной системы, во внутреннем коллекторе установлен датчик температуры, на этажерке приборной установлены датчики вибраций и линейных нагрузок. Все датчики, установленные в моноблоке, связаны с блоком регистрации, установленном в герметичном грузовом отсеке.
На боковой створке в хвостовом отсеке установлены концевые выключатели, соединенные с панелью сигнализации на гидропульте. В верхней и нижней частях стойки установлены концевые выключатели, соединенные с панелью сигнализации на гидропульте.
Более того, два клиновых упора, установленные в верхней части передней поверхности силового кожуха моноблока, выполнены с возможностью введения их при рабочем положении в клиновые пазы на кронштейнах внизу стойки. При этом с помощью гидроцилиндра клиновые упоры, введенные в клиновые пазы, дожимаются с помощью гидроцилиндра для фиксирования моноблока в рабочем положении, совместно образуя жесткую силовую схему, объединенную с жесткой частью каркаса - грузовой рампой самолета, за счет усилия-подтяга.
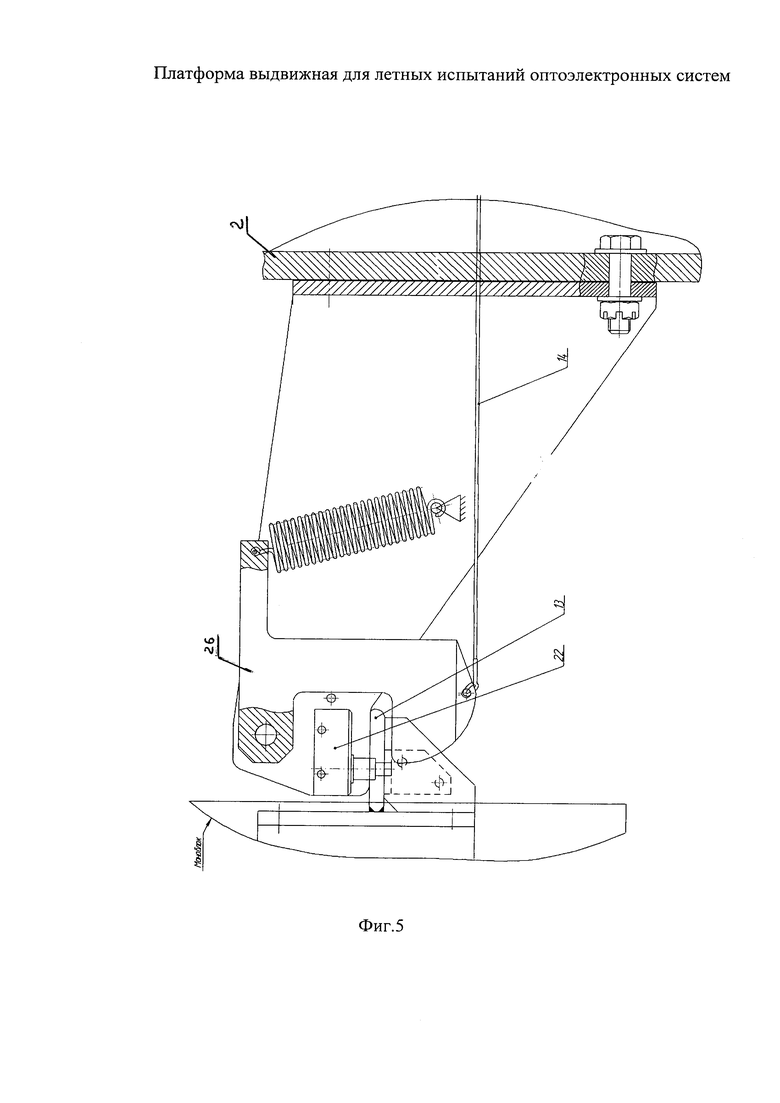
Для фиксации моноблока в верхнем - транспортном положении на силовом кожухе моноблока установлен фиксирующий зуб, входящий в зацепление с ним подпружиненный крюк-замок, размещенный на кронштейне стойки, связанный тросовым приводом с рычагом управления замком. Моноблок выполнен с возможностью расположения его в транспортном положении в верхней части стойки и удерживания замком (крюком), связанным тросовым приводом. Моноблок в транспортном положении находится внутри закрытого створками грузового отсека и удерживается размещенным на стойке замком (крюком), связанным тросовым приводом с рычагом управления на гидропульте.
Установленные в гермоотсеке: гидронасосная станция, гидропульт, блок виброизмерений, блок вентиляторов, видеорегистратор, соединены с устройствами, размещенными в негерметичном хвостовом отсеке посредством электропроводки, троса управления замком, шлангом подачи воздуха в моноблок, трубопроводами подачи гидравлической жидкости, которые проведены через герметичные вводы в гермостенке, установленной между отсеками.
Дополнительно моноблок при взлет-посадке и хранении на стоянке защищает оптику от разлетающихся частиц.
Таким образом, за счет включения моноблока в общую силовую схему с каркасом самолета и прижатия расклинивающих упоров, расположенных на силовом каркасе моноблока, к клиновым пазам на стойке платформы, жестко связанной с одной из наиболее жестких и прочных частей каркаса самолета-грузовой рампе, достигается повышение жесткости.
Моноблок с оптоэлектронной системой, содержащей хрупкие оптические элементы, в транспортном положении и при хранении на стоянке находится внутри хвостового отсека самолета и защищен закрытыми створками грузового люка от разлетающихся частиц при взлете-посадке и несанкционированного доступа при хранении на стоянке.
Вместо механизма вертикального перемещения с винтовым приводом (в прототипе), в предлагаемом устройстве использовано устройство вертикального перемещения (выдвижения) моноблока с оптоэлектронной системой с использованием гидроцилиндра, а также для обеспечения повышенной жесткости установки моноблока с оптоэлектронной системой необходимой для обеспечения стабильности ее работы и повышения точности измерений при летных испытаниях применены клиновидные упоры, расположенные на силовом кожухе моноблока. Под действием гидроцилиндра клиновые упоры моноблока входят в клиновые пазы, расположенные на стойке и за счет усилия подтяга гидроцилиндром образуют жесткую силовую схему, объединяющую моноблок с жесткой частью каркаса самолета-грузовой рампой.
Сущность изобретения поясняется чертежами, где:
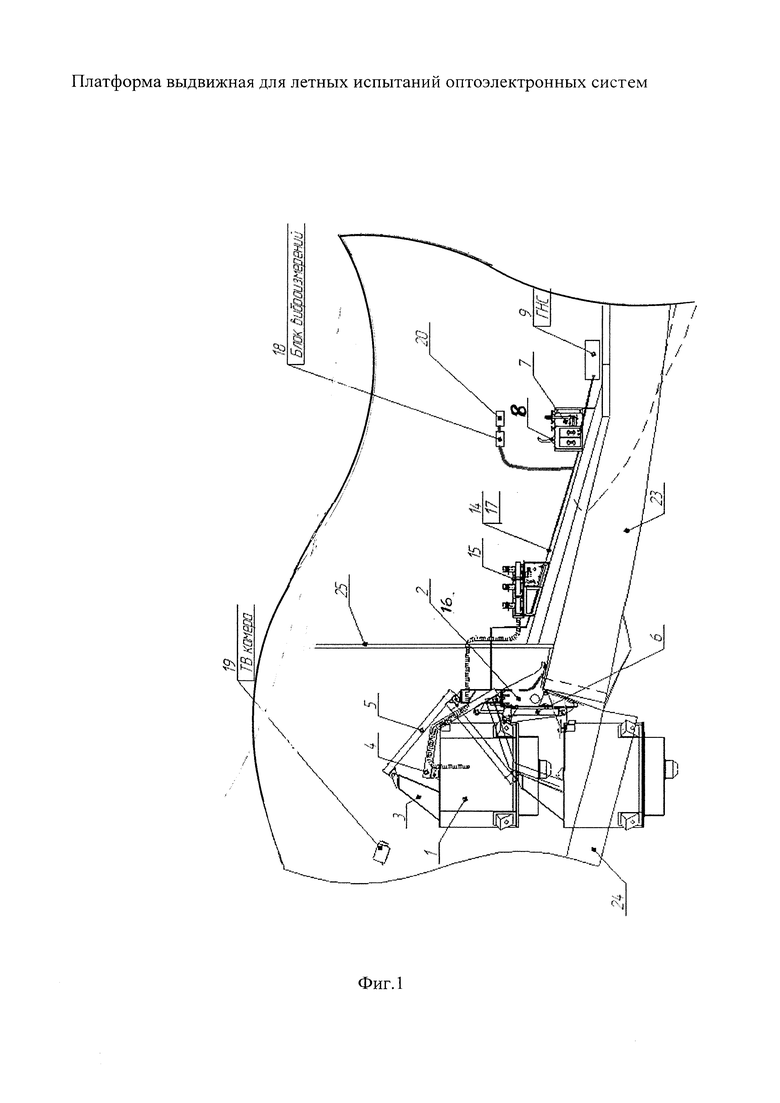
на фиг. 1 представлена структурная схема платформы выдвижной, размещенной в хвостовом отсеке фюзеляжа самолета;
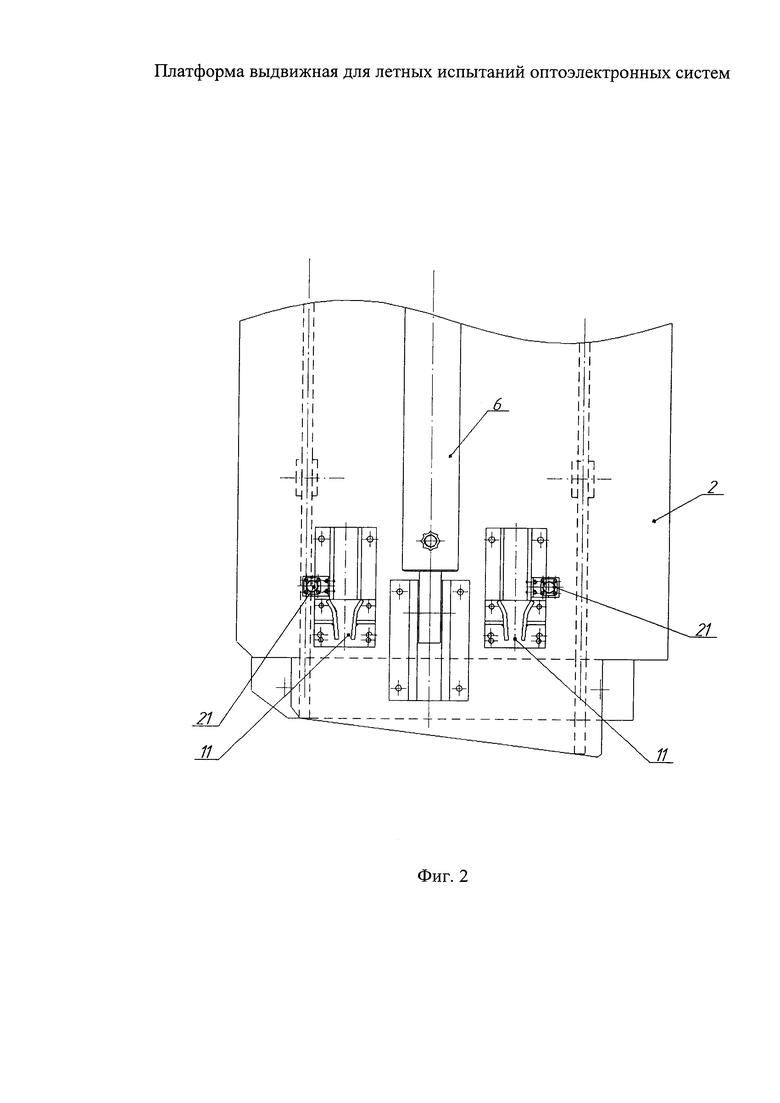
на фиг. 2 - установка гидроцилиндра на стойке;
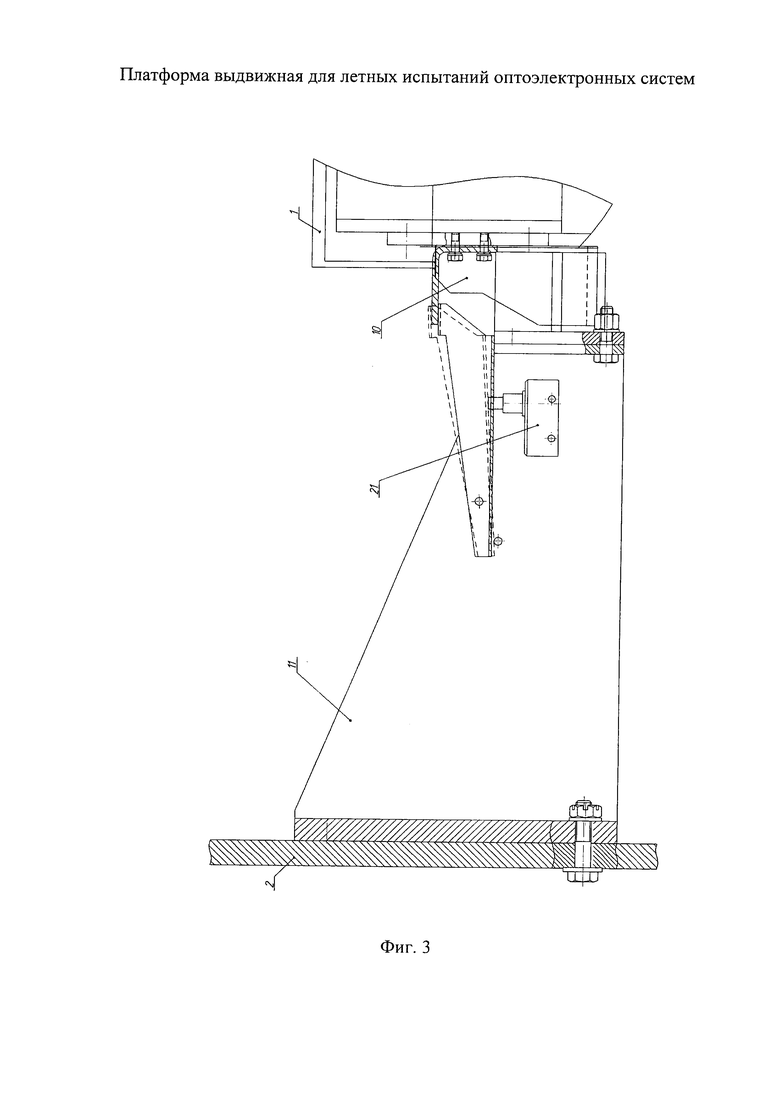
на фиг. 3 - установка концевого выключателя для контроля крайнего нижнего положения моноблока на стойке;
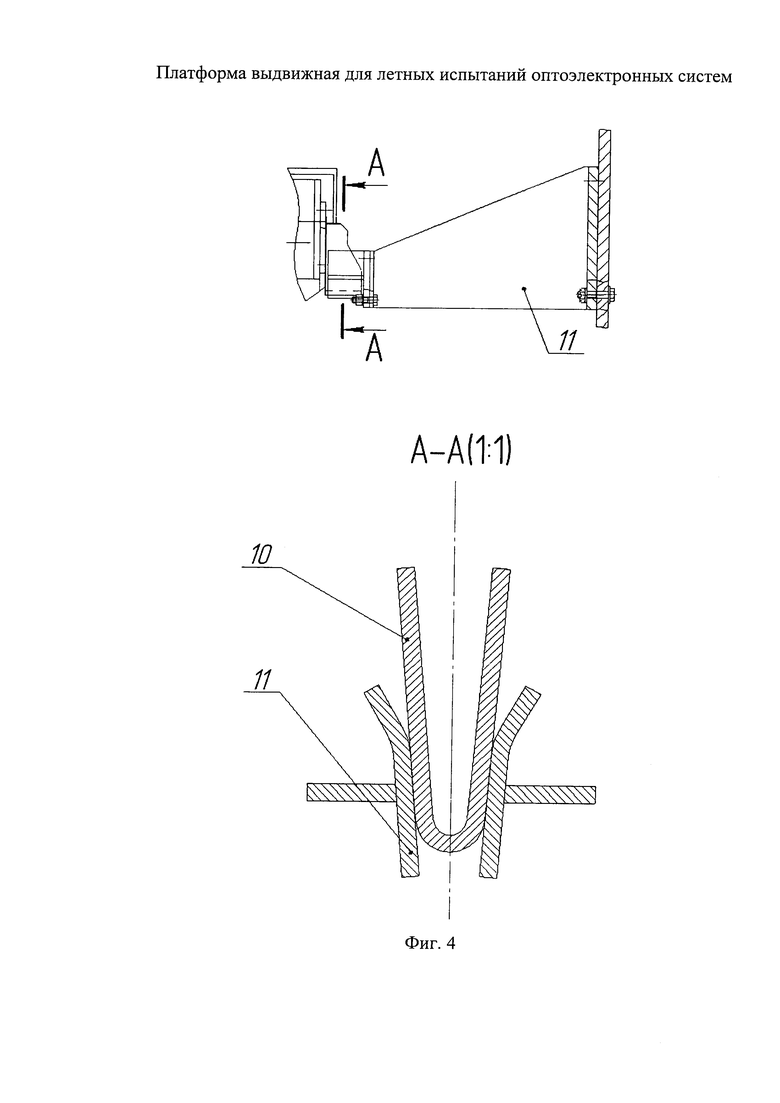
на фиг. 4 - установка клинового упора, входящий в клиновый паз;
на фиг. 5 - установка замка.
На фиг. 1 представлена структурная схема платформы выдвижной размещенной в хвостовом отсеке фюзеляжа самолета, в составе моноблока с оптоэлектронной аппаратурой и системы выдвижения, позволяющей размещать моноблок как в верхнем (транспотном),так и в нижнем (рабочем) положении, в этом случае после выдвижения моноблок выходит за пределы обводов хвостовой части фюзеляжа, а также подсистем, обеспечивающих и контролирующих работу оптоэлектронной аппаратуры, в том числе обдува блоков оптоэлектронной аппаратуры, контроля и регистрации действующих вибраций, линейных нагрузок, температуры, видеорегистрации.
Предлагаемая платформа выдвижная (фиг. 1) содержит моноблок с комплектом оптоэлектронной аппаратуры (1), состоящим из этажерки приборной, в силовом кожухе, выполненного в форме - прямой призмы с закругленной передней гранью и с наклонной стойкой (3), размещенной в задней зоне верхней поверхности силового кожуха моноблока, стойку (2), установленную на торце грузовой рампы (23), рычажный механизм выдвижения параллелограмного типа с гидроприводом, включающим рычаг-подвес, выполненный в виде изогнутой балки (4), рычаг-стабилизатор (5), гидроцилиндр (6), подключенный через трубопроводы к гидропульту (7) с ручным гидронасосом (8) и гидронасосной станции (9). Рычаг-подвес (4) шарнирно связан с кронштейнами на стойке (2) и кронштейнами на верхней поверхности силового кожуха моноблока (1), рычаг-стабилизатор (5), шарнирно связан с кронштейнами на верней части стойки (2) и кронштейнами наклонной стойки (3) силового кожуха. В совокупности кинаматика рычагов обеспечивает заданную траекторию движения моноблока при его выдвижении вниз (рабочее положение) или вверх (транспортное) положение. Движеие вниз ограничивется клиновыми упорами, а подъем вверх ограничивается фиксирующзим замком. Рычаг-подвес (4) установлен под рычагом-стабилизатором (5), кронштейны рычага-подвеса (4) в количестве двух штук шарнирно соединены с кронштейнами, установленными в средней части стойки (2). Два других кронштейна рычага-подвеса со стороны моноблока шарнирно соединены с двумя кронштейнами на верхней поверхности силового кожуха моноблока. Кронштейны рычага-стабилизатора со стороны стойки шарнирно соединены с кронштейнами, установленными на верхней части стойки (2), кронштейны рычага-стабилизатора со стороны моноблока шарнирно соединены с кронштйенами на стойке, установленной в задней зоне верхней поверхности силового кожуха моноблока. Действующие длины рычага-подвеса и рычага-стабилизатора равны, а центры шарниров рычага подвеса и рычага-стабилизатора находятся соответственно на одной вертикали, как на стойке, так и на моноблоке, при этом выполняются условия работы параллелограмного рычажного механизма и обеспечивается, таким образом, плоско-параллельное вертикальное перемещение моноблока. Гидроцилиндр (6) шарнирно установлен на кронштейнах в основании стойки (2)и на рычаге-подвесе (4). Посредством выдвижения или уборки штока гидроцилиндра, рычаг-подвес поворачивается, поднимая или опуская соединенный с ним моноблок. Для фиксации моноблока (1) в нижнем (рабочем) положении в верхней части передней поверхности силового кожуха моноблока установлены два клиновых упора (10), входящих в соответствующие клиновые пазы, размещенные на кронштейнах (11) (фиг. 3, 4) в нижней части стойки (2), фиг. 2. Для фиксации моноблока (1) в верхнем (транспортном) положении на силовом кожухе моноблока предусмотрен фиксирующий зуб (13), фиг. 5, размещенный в верней части передней поверхности силового кожуха моноблока и входящий в зацепление с подпружиненным крюком 26 замка (12), фиг. 5. Для контроля крайних нижнего и верхнего положений моноблока на стойке (2) установлены концевые выключатели, (фиг 3, 4) (21) и (22), соединенные с сигнальными лампами, расположенными на гидропульте (7). Одновременно при достижении моноблоком крайних положений через электропанель гидропульта подается сигнал на отключение гидронасосной станции (9). Для видеофиксации процессов выдвижения и уборки моноблока установлены две видеокамеры (19), обеспечивающие видеонаблюдение и видеозапись в боковой и фронтальной плоскостях. В гермоотсеке видеозапись осуществляется на видеорегистраторе (20). Для отключения замка, удерживающего моноблок (1) в транспортном положении при переводе его в рабочее положение, предусмотрен тросовой механизм управления замком (14), соединяющий рычаг управления замком, размещенном на гидропульте (7) с подпружиненным крюком замка (12).
Для обеспечения работы блоков оптоэлектронной аппаратуры предусмотрено поддержание заданной температуры в моноблоке путем подачи воздуха от блока вентиляторов (15) с помощью шланга (16). Для контроля уровня вибраций и перегрузок, действующих на блоки оптоэлектронной аппаратуры, в моноблоке в контрольных точках установлены вибродатчики и датчики линейных нагрузок, выдающие сигналы на блок регистрации (18). Коммуникации, соединяющие устройства находящиеся в гермоотсеке с устройствами, размещенными в негерметичном хвостовом отсеке (электропроводка, трос управления (14) замком (12), шланг подачи воздуха в моноблок (16), трубопроводы (17) подачи гидравлической жидкости от гидропульта (7) в гидроцилиндр (6) проходят через герметичные вводы в гермостенке (25).
Платформа выдвижная функционирует следующим образом.
В транспортном положении, при хранении на стоянке платформа выдвижная находится внутри хвостового отсека и защищена от разлетающихся частиц при взлете-посадке и несанкционированного доступа на стоянке. При этом моноблок (1) удерживается крюком замка (12).
Выдвижение моноблока (1) происходит следующим образом: при открытой створке (24) хвостового отсека с помощью тросового механизма (14) открывается замок (12), удерживающий моноблок в транспортном положении, затем с помощью гидропривода производится выдвижение моноблока в рабочее положение, при достижении которого клиновые упоры (10) (две штуки) на моноблоке (1) входят в клиновые пазы (11) на стойке(2), жестко закрепленной на торце грузовой рампы (23) и расклиниваются усилием гидроцилиндра (6), образуя жесткую связь моноблока с каркасом самолета. При достижении моноблоком рабочего положения гидропривод автоматически отключается.
Для обеспечения работы блоков оптоэлектронной аппаратуры предусмотрено обеспечение заданной температуры в моноблоке путем подачи воздуха от блока вентиляторов (15) через шланг (16), обеспечен контроль уровня вибраций и перегрузок, действующих на блоки оптоэлектронной аппаратуры, причем в моноблоке в контрольных точках установлены вибродатчики и датчики линейных нагрузок, выдающие сигналы на блок регистрации (19). Коммуникации, соединяющие устройства, находящиеся в гермоотсеке с устройствами, размещенными в негерметичном хвостовом отсеке (электропроводка, трос управления замком, шланг подачи воздуха (16) в моноблок, трубопроводы (17) подачи гидравлической жидкости в гидроцилиндр (6)) проходят через герметичные вводы в гермостенке (25).
Уборка моноблока осуществляется в следующем порядке: с помощью гидропривода моноблок поднимается вверх и занимает транспортное положение, при этом автоматически срабатывает замок, удерживающий моноблок в транспортном положении, и отключается гидропривод. Створки (24) хвостового отсека закрываются.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
| ГРУЗОВОЙ ОТСЕК ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2099240C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ТРАНСПОРТИРОВКИ ГРУЗОВ | 2023 |
|
RU2833448C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТОВ ТИПА МИ-8 САМОЛЕТОМ ИЛ-76 И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТОВ МИ-8 ПРИ ТРАНСПОРТИРОВКЕ ИХ САМОЛЕТОМ ИЛ-76 | 2005 |
|
RU2310584C2 |
| СПОСОБ ОБСЛУЖИВАНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ И МНОГОРАЗОВАЯ АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342288C1 |
| ТРАНСПОРТНЫЙ САМОЛЕТ | 1991 |
|
RU2022882C1 |
| Грузовой самолёт интегральной схемы с неотклоняемой хвостовой рампой для погрузки и выгрузки крупногабаритного груза | 2017 |
|
RU2668881C2 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
| РАМПОВЫЙ ГРУЗОВОЙ САМОЛЁТ | 2017 |
|
RU2668012C1 |
| ГРУЗОВАЯ КАБИНА ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ПЕРЕВОЗКИ ГРУЗА В КОНТЕЙНЕРАХ | 1995 |
|
RU2092386C1 |
Изобретение относится к летным испытаниям авиационных оптоэлектронных систем. Платформа выдвижная для летных испытаний оптоэлектронных систем при установке на самолет, имеющий грузовую рампу и створки хвостового отсека, содержит моноблок (1) с комплектом оптоэлектронной аппаратуры, стойку (2), установленную на торце грузовой рампы (23), рычажный механизм выдвижения параллелограммного типа с гидроприводом, включающим рычаг-подвес, выполненный в виде изогнутой балки (4), рычаг-стабилизатор (5), гидроцилиндр (6), подключенный через трубопроводы к гидропульту (7) с ручным гидронасосом (8) и гидронасосной станции (9). Рычаг-подвес шарнирно связан с кронштейнами на стойке (2) и кронштейнами на верхней поверхности силового кожуха моноблока (1), рычаг-стабилизатор (5) шарнирно связан с кронштейнами на верней части стойки (2) и кронштейнами наклонной стойки (3) силового кожуха. Изобретение позволяет расширить угол обзора контролируемого пространства, повышает надежность, устойчивость, точность измерений и целеуказания. 1 з.п. ф-лы, 5 ил.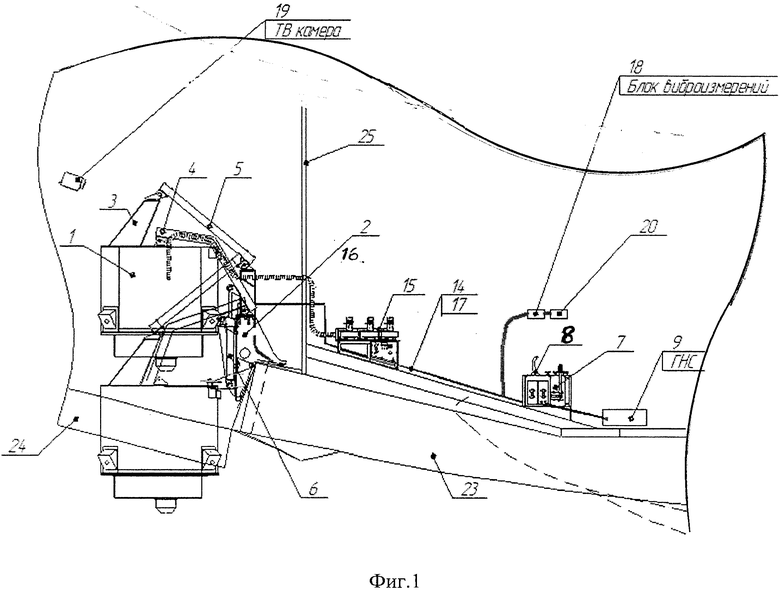
1. Платформа выдвижная для летных испытаний оптоэлектронных систем при установке на самолет, имеющий грузовую рампу и створки хвостового отсека, содержащая механизм выдвижения с приводом, оптоэлектронное устройство, закрепленное на подвижной платформе, перемещаемой из убранного положения в выдвинутое и обратно, отличающаяся тем, что дополнительно введены выдвижной моноблок, состоящий из этажерки приборной с оптоэлектронными системами, включая элементы подсистем, обеспечивающих работоспособность оптоэлектронных систем, силового кожуха - прямой призматической формы, с наклонной стойкой, размещенной в задней зоне верхней поверхности силового кожуха моноблока, и с кронштейнами подвески, со скругленной передней гранью с клиновыми упорами для фиксации моноблока в нижнем - рабочем положении и фиксирующим зубом с помощью замка для фиксации моноблока в верхнем-транспортном положении, а механизм выдвижения выполнен в виде механизма параллелограммного типа, связанного с гидроприводом для вертикального выдвижения моноблока, содержит стойку, установленную на торце грузовой рампы, выполненную с кронштейнами для установки клиновых пазов внизу стойки, гидроцилиндра, систему рычагов подвески, состоящую из рычага-подвеса и рычага-стабилизатора, рычаг-подвес установлен под рычагом - стабилизатором, кронштейны рычага-подвеса в количестве двух штук шарнирно соединены с кронштейнами, установленными в средней части стойки; два других кронштейна рычага-подвеса со стороны моноблока шарнирно соединены с двумя кронштейнами на верхней поверхности силового кожуха моноблока; два кронштейна рычага-стабилизатора со стороны стойки шарнирно соединены с кронштейнами, установленными на верхней части стойки, кронштейны рычага-стабилизатора со стороны моноблока шарнирно соединены с кронштейнами на наклонной стойке, действующие длины рычага-подвеса и рычага-стабилизатора равны, а центры шарниров рычага-подвеса и рычага-стабилизатора находятся соответственно на одной вертикали как на стойке, так и на моноблоке, при этом выполняются условия работы параллелограммного рычажного механизма и обеспечивается, таким образом, плоско-параллельное вертикальное перемещение моноблока;
исполнительный гидроцилиндр гидропривода соединен кронштейном на стойке и с кронштейном на рычаге-подвесе и подключен через трубопроводы к гидропульту с ручным гидронасосом и гидронасосной станции;
при этом элементы подсистем, обеспечивающие работоспособность оптоэлектронных систем, содержат: систему термостатирования, включающую установленные в гермоотсеке панель управления вентиляторами, подключенную к трем вентиляторам для подачи воздуха из грузоотсека в блоки оптоэлектронной системы через коллектор с обратными клапанами, шланг, проходящий через гермоввод из герметичного грузового отсека в негерметичный хвостовой и входящий через подвижный угловой проходник на силовом кожухе в коллектор, находящийся внутри моноблока, внутренний коллектор связан гибкими трубопроводами с блоками оптоэлектронной системы, во внутреннем коллекторе установлен датчик температуры, на этажерке приборной установлены датчики вибраций и линейных нагрузок, все датчики, установленные в моноблоке, связаны с блоком регистрации, установленном в герметичном грузовом отсеке;
на боковой створке в хвостовом отсеке установлены концевые выключатели, соединенные с панелью сигнализации на гидропульте, в верхней и нижней частях стойки установлены концевые выключатели, соединенные с панелью сигнализации на гидропульте;
два клиновых упора, установленных в верхней части передней поверхности силового кожуха моноблока, выполнены с возможностью введения их при рабочем положении в клиновые пазы на кронштейнах внизу стойки, при этом с помощью гидроцилиндра клиновые упоры, введенные в клиновые пазы, дожимаются с помощью гидроцилиндра для фиксирования моноблока в рабочем положении, совместно образуя жесткую силовую схему, объединенную с жесткой частью каркаса - грузовой рампой самолета, за счет усилия-подтяга;
для фиксации моноблока в верхнем - транспортном положении на силовом кожухе моноблока установлен фиксирующий зуб, входящий в зацепление с ним подпружиненный крюк-замок, размещенный на кронштейне стойки, связанный тросовым приводом с рычагом управления замком, а моноблок выполнен с возможностью расположения его в транспортном положении в верхней части стойки и удерживания замком, связанным тросовым приводом.
2. Платформа выдвижная по п. 1, отличающаяся тем, что установленные в гермоотсеке: гидронасосная станция, гидропульт, блок виброизмерений, блок вентиляторов, видеорегистратор, соединены с устройствами, размещенными в негерметичном хвостовом отсеке посредством электропроводки, троса управления замком, шлангом подачи воздуха в моноблок, трубопроводами подачи гидравлической жидкости, которые проведены через герметичные вводы в гермостенке, установленной между отсеками;
при взлет-посадке и хранении на стоянке дополнительно моноблок защищает оптику от разлетающихся частиц.
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Почвенный бур | 1924 |
|
SU8812A1 |
| US 9493229 B2, 15.11.16 | |||
| US 2017001706 A1, 05.01.2017. | |||

