Заявляемое изобретение относится к авиационному транспорту и предназначено для обеспечения позиционирования и выравнивания беспилотного летательного аппарата при его стыковке на вертикальной поверхности.
По патенту RU 163251 известно устройство вертолетной внешней подвески для швартовки беспилотного самолета, содержащее силовой канат, верхний узел крепления к фюзеляжу вертолета и нижний узел на силовом канате, где нижний узел представляет собой узел сцепления для швартовки беспилотного самолета, состоящий из треугольной петли с эластичным канатом в основании, концы которого заделаны вместе с эластичными наконечниками в концах двух боковых стержней, другие концы которых соединены шарнирно с корпусом, являющимся вершиной петли и на котором установлена пружина, обеспечивающая натяжение эластичного каната в основании разводом стержней в стороны, кроме того к корпусу шарнирно закреплена штанга, соединяющая шарнирно другим своим концом петлю с силовым канатом для швартовки летящего беспилотного самолета, обеспечивая посадку, а также взлет его с земли по вертолетному.
Недостатком известного устройства является сложность конструкции, невозможность использования для стыковки легкого беспилотного летательного аппарата, преимущественно мультикоптера, доставившего груз клиенту в городских условиях, невозможность использования для стыковки к вертикальной поверхности.
По патенту на изобретение RU 2490183 известно стыковочное устройство космических аппаратов, содержащее активный агрегат, в центре которого установлен стыковочный механизм, и пассивный агрегат с ответным приемным конусом, который заканчивается гнездом, отличающееся тем, что приемным конусом служит сопло маршевого ракетного двигателя отделяющейся части последней ступени ракеты космического назначения, а стыковочный механизм выполнен в виде телескопически соединенных между собой штанг, свободный конец которых снабжен подпружиненными лепестками типа «зонтик», установленными с возможностью раскрытия и поджатия.
Недостатком известного устройства является сложность использования для стыковки легкого беспилотного летательного аппарата, преимущественно мультикоптера, доставившего груз клиенту в городских условиях, вследствие невозможности позиционирования пристыкованного объекта в горизонтальной плоскости.
Наиболее близким к заявленному техническому решению является известный по патенту на изобретение RU 2562467 механический рычажный замок, содержащий кронштейн, закрепленный на первом отделяемом элементе; параллельно стыку разделяемых элементов установлено коромысло с возможностью поворота на оси; с первым плечом коромысла находится в контакте рычаг, рычаг установлен с возможностью поворота на кронштейне за счет соединяющей их общей оси; штырь, установленный перпендикулярно стыку разделяемых элементов и кинематически связанный одним концом со вторым плечом коромысла, на другом конце штыря имеется резьбовая часть, на которой установлена гайка и опора, и пружина, находящаяся между гайкой и опорой, отличающийся тем, что на оси, соединяющей рычаг с кронштейном, расположена пружина, при этом концы пружины выведены наружу и упруго поджимают поверхности рычага и кронштейна; положение коромысла зафиксировано по цилиндрической поверхности второго отделяемого элемента; опора, установленная на штыре, контактирует с кронштейном.
Недостатком известного устройства является сложность использования для стыковки легкого беспилотного летательного аппарата, преимущественно мультикоптера, доставившего груз клиенту в городских условиях, вследствие невозможности позиционирования пристыкованного объекта.
Задачей заявленного изобретения является создание системы позиционирования и выравнивания в горизонтальной плоскости легкого беспилотного летательного аппарата, преимущественно мультикоптера, доставившего груз клиенту в городских условиях, в процессе его стыковки с приемным стыковочным устройством, расположенным в здании и принимающим беспилотный летательный аппарат через плоскость фасада этого задания или отдельно установленным вне зданий и сооружений, на специально подготовленных площадках.
Задача изобретения решается тем, что в стыковочной системе беспилотного летательного аппарата, содержащей установленную на стыкуемом объекте стыковочную штангу с устройством стыковки и приемное стыковочное устройство, согласно изобретению, на стыковочной штанге непосредственно за устройством стыковки закреплено червячное колесо, выполненное с возможностью совмещения с установленным на приемном стыковочном устройстве средством позиционирования, состоящем из двух захватов, каждый из которых состоит из верхнего и нижнего рычагов, при этом на каждой паре верхних и на каждой паре нижних рычагов параллельно друг другу установлены червячные валы, выполненные с возможностью передачи усилий на вышеуказанное червячное колесо. Червячные валы приводятся во вращение электродвигателями. Захваты выполнены с возможностью сжатия и разжатия.
Заявленное изобретение позволяет создать простую и надежную систему для выравнивания беспилотного летательного аппарата, преимущественно мультикоптера, в горизонтальной плоскости (или под углом к ней) и его позиционирования, например, относительно центра проема приемного стыковочного устройства, через которое идет прием беспилотного летательного аппарата для разгрузки. Выравнивание и позиционирование беспилотного летательного аппарата, доставившего груз клиенту в городских условиях, является необходимым, поскольку легкий мультикоптер имеет недостаточную путевую устойчивость. При подлете к месту стыковки, например, вследствие ветровой нагрузки, в момент касания с приемным стыковочным устройством он может находиться под углом к нему или сместиться в сторону. Заявленное изобретение позволяет компенсировать эти неточности и четко позиционировать беспилотный летательный аппарат относительно приемного устройства с целью обеспечить его надежную фиксацию и проведение необходимых манипуляций с беспилотным летательным аппаратом в автоматическом режиме, в том числе разгрузку и загрузку его материальными ценностями.
Сущность заявленного изобретения поясняется рисунками:
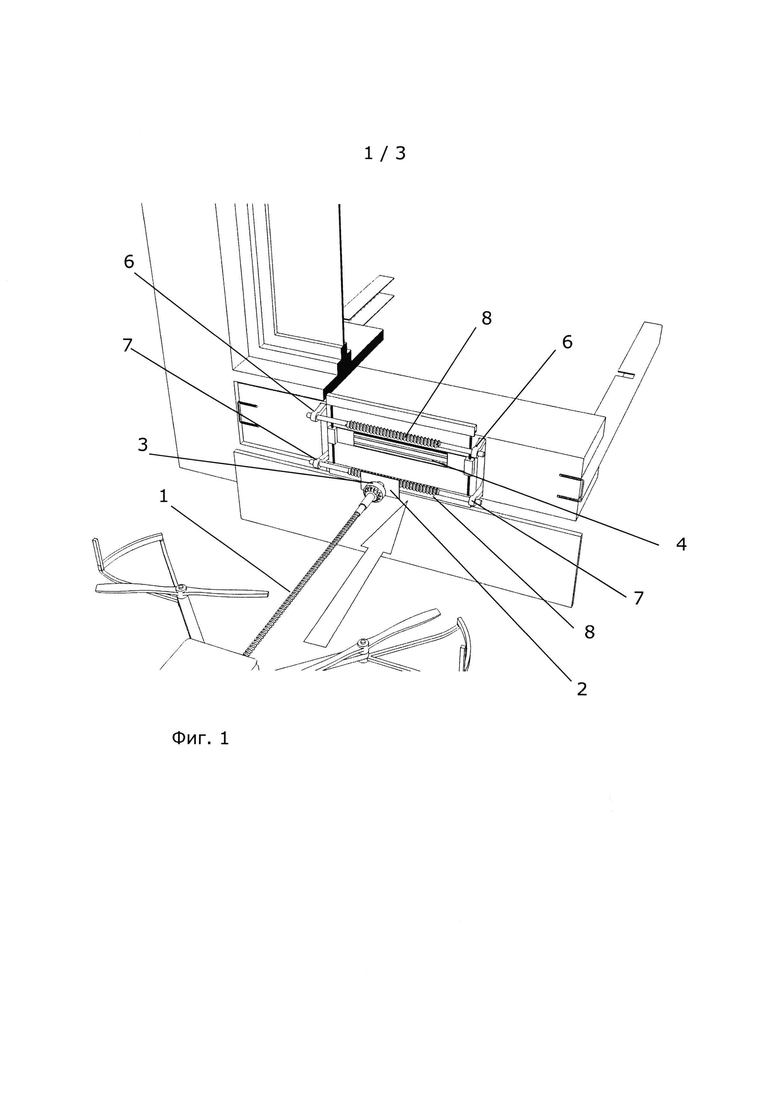
На фиг. 1 показан беспилотный летательный аппарат, оснащенный штангой с устройством стыковки при подлете к приемному стыковочному устройству.
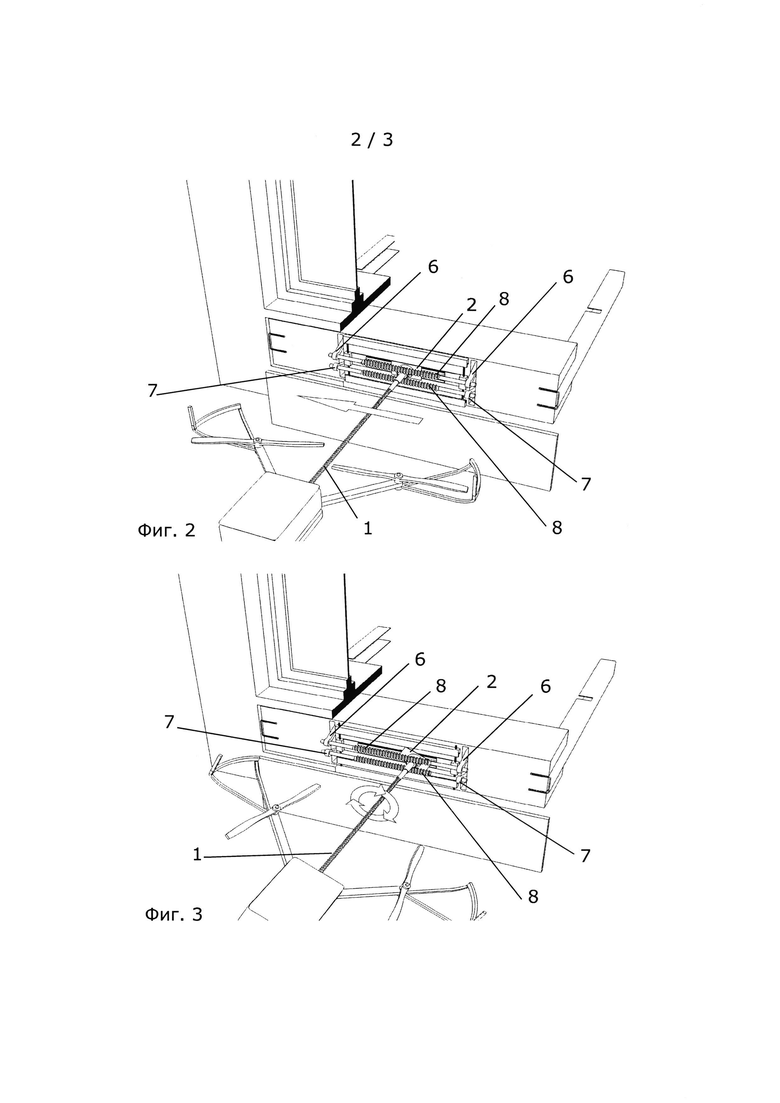
На фиг. 2 показан беспилотный летательный аппарат, оснащенный штангой с устройством стыковки, пристыкованный к приемному стыковочному устройству со сжатыми захватами и зафиксированным между ними червячным колесом в момент выравнивания по центру.
На фиг. 3 показан беспилотный летательный аппарат, оснащенный штангой с устройством стыковки, пристыкованный к приемному стыковочному устройству со сжатыми захватами и зафиксированным между ними червячным колесом в момент выравнивания по горизонту.
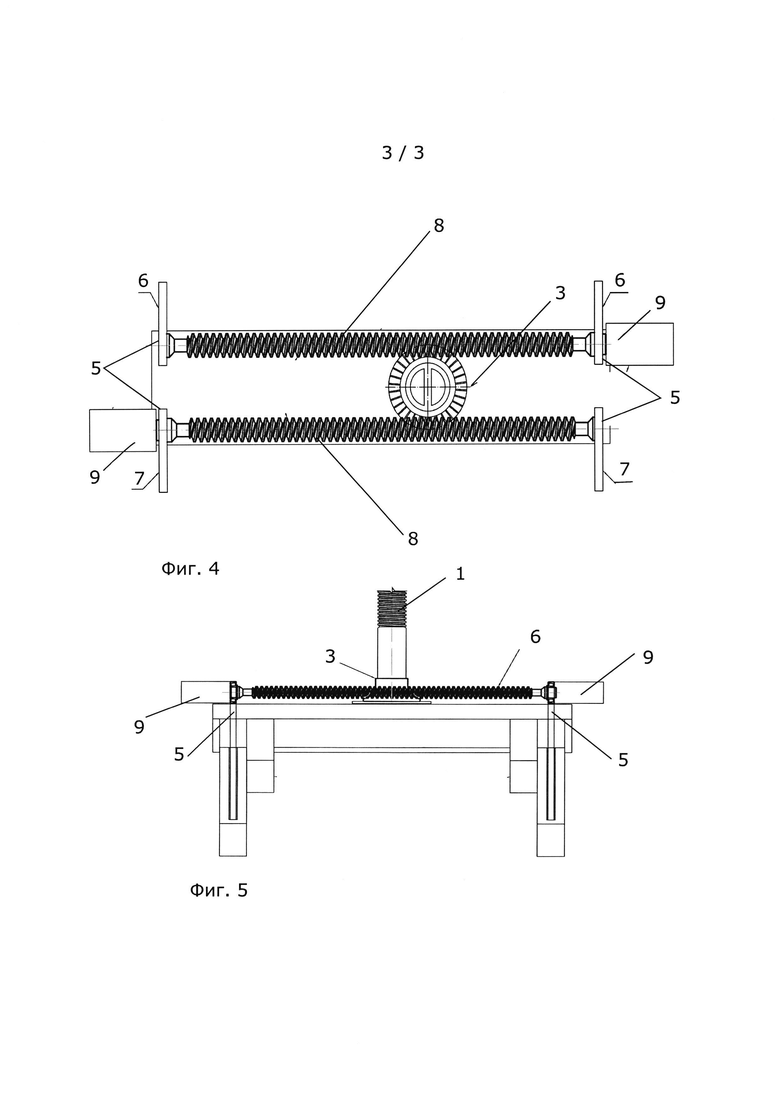
На фиг. 4 показан вид спереди на средство позиционирования устройства со сжатыми захватами и зафиксированным между ними червячным колесом.
На фиг. 5 показан вид сверху на средство позиционирования устройства со сжатыми захватами и зафиксированным между ними червячным колесом.
Стыковочная система беспилотного летательного аппарата состоит из стыковочной штанги 1 с устройством стыковки 2, на стыковочной штанге 1 непосредственно за устройством стыковки 2 закреплено червячное колесо 3 приемного стыковочного устройства, включающего средство 4 удержания беспилотного летательного аппарата и средство позиционирования, состоящее из двух захватов 5, каждый из которых состоит из верхнего 6 и нижнего 7 рычагов, при этом на каждой паре верхних 6 и на каждой паре нижних 7 рычагов параллельно друг другу установлены червячные валы 8, выполненные с возможностью передачи усилий на вышеуказанное червячное колесо 3, червячные валы 8 приводятся во вращение электродвигателями 9.
При стыковке беспилотного летательного аппарата стыковочная штанга с устройством стыковки, которое может быть выполнено в виде металлической пластины, упирается в приемное стыковочное устройство, которое может быть выполнено в виде электромагнита, контактная поверхность которого представляет собой вторую металлическую пластину. При этом червячное колесо, жестко закрепленное на стыковочное штанге, оказывается в зоне действия захватов. Захваты сжимаются и фиксируют червячное колесо между параллельными червячными валами посредством усилия сжатия. При этом проворачивание червячного колеса вокруг своей оси вращения не возможно из-за эффекта самоторможения червячных передач, т.е. блокируется зацеплением червяка с зубчатым колесом.
Механика выравнивания мультикоптера механическим захватом (упрощенный вариант): при вращении червячных валов в одну сторону с одинаковой скоростью в зависимости от направления вращения червячное колесо ходового вала перемещается вдоль червячных валов без вращения, увлекая за собой мультикоптер, при вращении червячных валов в разные стороны с одинаковой скоростью шестерня вращается на месте без линейных перемещений, изменяя угол поворота мультикоптера к горизонту или любой другой плоскости, проходящей через ось вращения червячного колеса.
Изменения в позиционном расположении червячного колеса (и как следствие мультикоптера, так как ось вращения червячного колеса жестко определяет пространственное положение мультикоптера) возникают за счет вращения червячных валов, т.е. при вращении червячного вала в местах зацепления с червячным колесом возникают два параллельных усилия в плоскости вращения червячного колеса, передаваемые от червячных валов червячному колесу. Если усилия равны по модулю, но различны по направлению - червячное колесо и мультикоптер вращается на месте, если усилия равны по модулю и совпадают по направлению - червячное колесо (и мультикоптер) движется вдоль червячных валов без вращения, в остальных случаях имеет место быть совмещение вращения червячного колеса с его движением вдоль червячных валов. Червячное колесо может быть выполнено в виде конической шестерни, цилиндрического червячного колеса с выемкой поверхности вершин зубьев колеса (термины по ГОСТ 18498-89) или "юбкой" в виде диска с диаметром больше диаметра червячного колеса, расположенного на червячном колесе со стороны плоскости скольжения. Сжатие и разжатие захватов осуществляется посредством отдельного электродвигателя. Стыковочный узел мультикоптера и приемное стыковочное устройство может быть выполнено как в виде пластины с встречным электромагнитом, так и в виде защелки, захвата или любой другой системы. Позиционирование объекта может осуществляться до приведения стыковочного крепления в действие. Захваты с червячными валами могут быть выполнены с возможностью перемещения в горизонтальной плоскости с целью дополнительной фиксации, поджатия устройства стыковки к средству удержания, с этой целью захваты могут быть прикреплены к ходовому винту, работающему от отдельного электродвигателя. Механизм, приводящий в движение захваты, может быть любым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система приема товаров, доставляемых беспилотными летательными аппаратами (варианты) | 2018 |
|
RU2678523C1 |
| Способ монтажа маркеров, закрепляемых на проводах и молниезащитных тросах воздушных линий электропередачи, с помощью беспилотных летательных аппаратов, маркер и зажим | 2018 |
|
RU2690697C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ ЭЛЕКТРОПОЕЗД | 2017 |
|
RU2734559C2 |
| Механизм для запуска наноспутников | 2023 |
|
RU2829378C1 |
| Буксировочная система беспилотного летательного аппарата (варианты) | 2022 |
|
RU2778735C1 |
| ПОЛЕЗНАЯ НАГРУЗКА (ВАРИАНТЫ) И ВОЗДУШНАЯ ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) С ТАКОЙ ПОЛЕЗНОЙ НАГРУЗКОЙ | 2024 |
|
RU2831324C1 |
| Способ обнаружения нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов | 2020 |
|
RU2748070C1 |
| Способ оснащения воздушных судов авиационными средствами поражения | 2022 |
|
RU2808134C1 |
| СИСТЕМА И СПОСОБ ДОСТАВКИ ГРУЗОВ | 2018 |
|
RU2756702C2 |
| Способ применения БПЛА и система осуществления способа | 2023 |
|
RU2828920C1 |
Изобретение относится к области авиации, в частности к системам стыковки беспилотных летательных аппаратов. Стыковочная система беспилотного летательного аппарата содержит установленную на стыкуемом объекте стыковочную штангу с устройством стыковки и приемное стыковочное устройство. На стыковочной штанге непосредственно за устройством стыковки закреплено червячное колесо, выполненное с возможностью совмещения с установленным на приемном стыковочном устройстве средством позиционирования, состоящим из двух захватов. Каждый захват состоит из верхнего и нижнего рычагов, при этом на каждой паре верхних и на каждой паре нижних рычагов параллельно друг другу установлены червячные валы, выполненные с возможностью передачи усилия на вышеуказанное червячное колесо. Червячные валы приводятся во вращение электродвигателями. Захваты выполнены с возможностью сжатия и разжатия. Обеспечивается позиционирование и выравнивание летательного аппарата на заданный угол по отношению к горизонтальной плоскости. 2 з.п. ф-лы, 5 ил.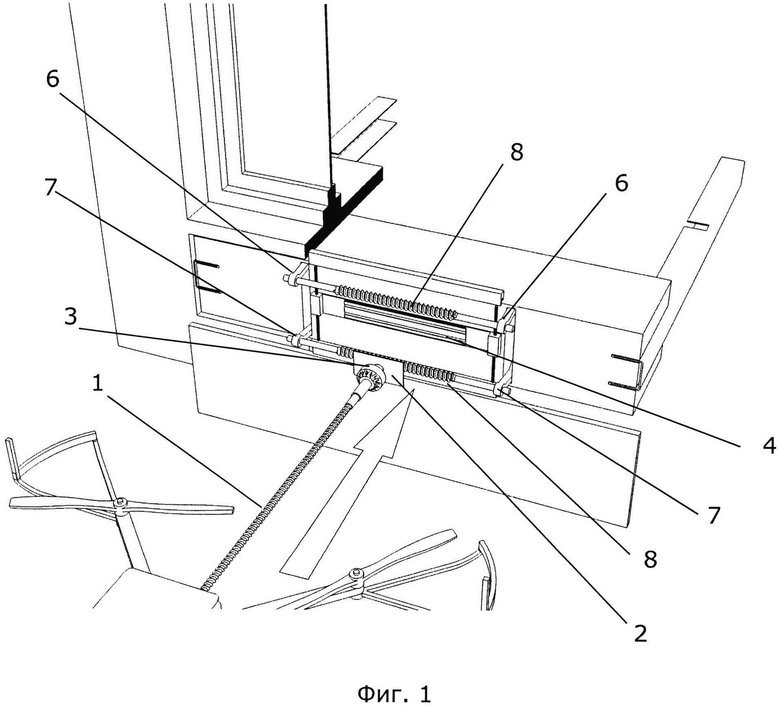
1. Стыковочная система беспилотного летательного аппарата, содержащая установленную на стыкуемом объекте стыковочную штангу с устройством стыковки и приемное стыковочное устройство, отличающаяся тем, что на стыковочной штанге непосредственно за устройством стыковки закреплено червячное колесо, выполненное с возможностью совмещения с установленным на приемном стыковочном устройстве средством позиционирования, состоящим из двух захватов, каждый из которых состоит из верхнего и нижнего рычагов, при этом на каждой паре верхних и на каждой паре нижних рычагов параллельно друг другу установлены червячные валы, выполненные с возможностью передачи усилий на вышеуказанное червячное колесо.
2. Стыковочная система по п. 1, отличающаяся тем, что червячные валы приводятся во вращение электродвигателями.
3. Стыковочная система по п. 1, отличающаяся тем, что захваты выполнены с возможностью сжатия и разжатия.
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2490183C1 |
| МЕХАНИЧЕСКИЙ РЫЧАЖНЫЙ ЗАМОК (ВАРИАНТЫ) | 2013 |
|
RU2562467C2 |
| DE 3215229 C, 12.01.1989 | |||
| US 9387928 B1, 12.07.2016. | |||

