ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к транспортной технике, в частности к транспортным средствам, способным летать или совершать перемещение по воздуху для доставки пользователя в целевое место, а именно к полезным нагрузкам с улучшенной конструкцией и воздушным транспортным системам, в состав которых входит одна из таких полезных нагрузок и беспилотные летательные аппараты, выполненные с возможностью стыковки с указанной полезной нагрузкой.
УРОВЕНЬ ТЕХНИКИ
В настоящее время разработано множество различных конструкций полезной нагрузки для транспортировки пассажиров и/или грузов различных типов, а также множество различных автоматизированных или полуавтоматизированных воздушных транспортных систем, основанных на использовании беспилотных летательных аппаратов (БПЛА), выполненных с возможностью разъемной стыковки с полезной нагрузкой для ее перемещения по воздуху в целевое место. Однако несмотря на то, что современные конструкции полезной нагрузки и современные воздушные транспортные системы, предназначенные для перемещения указанной полезной нагрузки по воздуху с использованием беспилотных летательных аппаратов, пристыкованных к корпусу полезной нагрузки, позволяют относительно быстро доставлять или перемещать пользователя по воздуху в целевое место, они имеют существенный недостаток, заключающийся в невозможности беспосадочного перемещения такой полезной нагрузки по воздуху в целевое место в течение длительного времени, то есть без необходимости в посадке полезной нагрузки с последующим техническим обслуживанием и восполнением запаса хода беспилотных летательных аппаратов, задействованных в перемещении указанной полезной нагрузки по воздуху.
Следовательно, ввиду по меньшей мере сформулированного выше недостатка современных конструкций полезной нагрузки и воздушных транспортных систем, основанных на использовании беспилотных летательных аппаратов для перемещения полезной нагрузки по воздуху, разработка усовершенствованных конструкций полезной нагрузки и усовершенствованных воздушных транспортных систем является актуальной задачей.
В частности, в публикации заявки на патент США №2023294849 (US 2023294849), опубликованной 21 сентября 2023 года, описана полезная нагрузка, содержащая корпус, снабженный одним или более стыковочными механизмами, каждый из которых выполнен с возможностью разъемного зубчатого взаимодействия с ним зубчатой направляющей стыкуемого беспилотного летательного аппарата с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к корпусу полезной нагрузки, и описана воздушная транспортная система, в состав которой входит полезная нагрузка согласно US 2023294849 и беспилотный летательный аппарат, состыкованный с корпусом полезной нагрузки.
Следует отметить, что в полезной нагрузке и воздушной транспортной системе, раскрытых в US 2023294849, также не устранен сформулированный выше недостаток, заключающийся в невозможности беспосадочного перемещения такой полезной нагрузки по воздуху в целевое место в течение длительного времени.
Таким образом, очевидна потребность в дальнейшем совершенствовании конструкций известных полезных нагрузок и совершенствовании воздушных транспортных систем, в состав которых входит такая полезная нагрузка, в частности для повышения дальности беспосадочного полета.
Следовательно, основная техническая проблема, решаемая настоящим изобретением, состоит в создании конструкций полезной нагрузки и воздушных транспортных систем, которые бы обеспечивали возможность перемещения такой полезной нагрузки по воздуху с использованием беспилотных летательных аппаратов и которых был бы по меньшей мере частично устранен обозначенный выше недостаток уровня техники, заключающийся в недостаточной дальности беспосадочного полета.
Дополнительная техническая проблема, решаемая настоящим изобретением, состоит в расширении арсенала транспортных средств, способных переместить или доставить пользователя/груз по воздуху в целевое место.
РАСКРЫТИЕ
Основная задача настоящего изобретения состоит в создании полезных нагрузок и воздушных транспортных систем, решающих каждая по меньшей мере обозначенную выше техническую проблему известного уровня техники, а также в расширении арсенала транспортных средств для перемещения грузов/пассажиров по воздуху.
Еще одна задача настоящего изобретения состоит в создании альтернативных конструкций полезной нагрузки и альтернативных воздушных транспортных систем, в состав которых входит такая полезная нагрузка, по отношению к известным в уровне техники техническим решениям.
Каждая из поставленных задач решена в первом аспекте настоящего изобретения благодаря тому, что в предложенной полезной нагрузке, содержащей: (i) корпус, снабженный одним или более стыковочными механизмами, каждый из которых выполнен с возможностью разъемного зубчатого взаимодействия с ним зубчатой направляющей стыкуемого беспилотного летательного аппарата с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к корпусу, по меньшей мере один из стыковочных механизмов дополнительно выполнен с возможностью разъемного зубчатого взаимодействия с ним зубчатой направляющей еще одного беспилотного летательного аппарата с обеспечением возможности воздействия указанного еще одного беспилотного летательного аппарата на указанный пристыкованный беспилотный летательный аппарат для вывода последнего из взаимодействия с указанным по меньшей мере одним стыковочным механизмом.
В одном из вариантов реализации первого аспекта настоящего изобретения корпус полезной нагрузки может быть снабжен двумя воздушными движителями, выполненными с противоположных сторон корпуса, а стыковочные механизмы могут быть установлены на корпусе полезной нагрузки с обеспечением возможности размещения воздушных движителей корпуса полезной нагрузки и воздушных движителей беспилотного летательного аппарата, состыкованного с корпусом полезной нагрузки, в одной плоскости с разных сторон корпуса полезной нагрузки или с заданным угловым смещением по периметру корпуса полезной нагрузки при вводе зубчатой направляющей беспилотного летательного аппарата в зубчатое взаимодействие с указанными стыковочными механизмами корпуса полезной нагрузки. Размещение воздушных движителей корпуса полезной нагрузки и воздушных движителей беспилотного летательного аппарата, состыкованного с корпусом полезной нагрузки, в одной плоскости с разных сторон корпуса полезной нагрузки или с заданным угловым смещением по периметру корпуса полезной нагрузки обеспечивает дополнительный технический результат, заключающийся в повышении стабильности корпуса полезной нагрузки в воздухе при стыковке указанного беспилотного летательного аппарата с корпусом полезной нагрузки, в частности благодаря минимизации взаимного влияния воздушных потоков, создаваемых воздушными движителями корпуса полезной нагрузки и воздушными движителями стыкуемого беспилотного летательного аппарата.
Кроме того, каждая из поставленных задач решена во втором аспекте настоящего изобретения благодаря тому, что в предложенном воздушной транспортной системе, содержащей: (i) полезную нагрузку, снабженную двумя или более стыковочными механизмами; и (ii) два или более беспилотных летательных аппаратов, каждый из которых снабжен зубчатой направляющей, выполненной с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одним из указанных стыковочных механизмов полезной нагрузки с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к полезной нагрузке, при этом корпус по меньшей мере одного из указанных беспилотных летательных аппаратов выполнен с обеспечением возможности по меньшей мере частичного прохождения через него корпуса другого беспилотного летательного аппарата из указанных беспилотных летательных аппаратов при перемещении указанного по меньшей мере одного беспилотного летательного аппарата или указанного другого беспилотного летательного аппарата по отношению к полезной нагрузке.
Кроме того, каждая из поставленных задач решена в третьем аспекте настоящего изобретения благодаря тому, что в предложенной полезной нагрузке, содержащей: (i) корпус, снабженный одной или более зубчатыми направляющими, каждая из которых выполнена с возможностью разъемного зубчатого взаимодействия с ней стыковочного механизма беспилотного летательного аппарата с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к корпусу по указанной зубчатой направляющей, при этом по меньшей мере одна из зубчатых направляющих корпуса дополнительно выполнена с возможностью разъемного зубчатого взаимодействия с ней стыковочного механизма еще одного беспилотного летательного аппарата с обеспечением возможности воздействия указанного еще одного беспилотного летательного аппарата на указанный пристыкованный беспилотный летательный аппарат для вывода последнего из взаимодействия с указанной по меньшей мере одной зубчатой направляющей.
Кроме того, каждая из поставленных задач решена в четвертом аспекте настоящего изобретения благодаря тому, что в предложенном воздушной транспортной системе, содержащей: (i) полезную нагрузку, снабженную двумя или более зубчатыми направляющими; и (ii) два или более беспилотных летательных аппаратов, каждый из которых снабжен стыковочным механизмом, выполненным с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одной из указанных зубчатых направляющих полезной нагрузки с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к полезной нагрузке по указанной по меньшей мере одной зубчатой направляющей, при этом корпус по меньшей мере одного из указанных беспилотных летательных аппаратов выполнен с обеспечением возможности по меньшей мере частичного прохождения через него корпуса другого беспилотного летательного аппарата из указанных беспилотных летательных аппаратов при перемещении указанного по меньшей мере одного беспилотного летательного аппарата или указанного другого беспилотного летательного аппарата по соответствующей по меньшей мере одной зубчатой направляющей полезной нагрузки.
Вышеописанные первый, второй, третий и четвертый аспекты настоящего изобретения обеспечивают каждый технический результат, заключающийся в повышении универсальности полезной нагрузки. Следует отметить, что повышенная универсальность полезной нагрузки обусловлена наличием возможности смены любого беспилотного летательного аппарата, разъемно пристыкованного к полезной нагрузке, на другой беспилотный летательный аппарат прямо в воздухе, то есть без необходимости в посадке этой полезной нагрузки для восполнения запаса хода заменяемого беспилотного летательного аппарата.
Вышеописанные первый, второй, третий и четвертый аспекты настоящего изобретения обеспечивают каждый дополнительный технический результат, заключающийся в повышении длительности или дальности полета полезной нагрузки. Следует отметить, что повышенная длительность или дальность полета полезной нагрузки также обусловлена наличием возможности смены любого беспилотного летательного аппарата, разъемно пристыкованного к полезной нагрузке, на другой беспилотный летательный аппарат прямо в воздухе, то есть без необходимости в посадке этой полезной нагрузки для восполнения запаса хода заменяемого беспилотного летательного аппарата.
Вышеописанные первый, второй, третий и четвертый аспекты настоящего изобретения обеспечивают каждый еще один дополнительный технический результат, заключающийся в уменьшении расхода энергоресурсов, необходимых для осуществления смены любого беспилотного летательного аппарата, разъемно пристыкованного к полезной нагрузке, на другой беспилотный летательный аппарат. Следует отметить, что уменьшенный расход энергоресурсов, требуемый для осуществления смены одного беспилотного летательного аппарата, пристыкованного к полезной нагрузке, на другой беспилотный летательный аппарат обусловлен тем, что указанный процесс смены осуществляется в результате воздействия другого беспилотного летательного аппарата, пристыковываемого к полезной нагрузки, на беспилотный летательный аппарат, который был ранее пристыкован к полезной нагрузке и который необходимо вывести из взаимодействия с полезной нагрузкой.
Кроме того, вышеописанные первый, второй, третий и четвертый аспекты настоящего изобретения обеспечивают каждый еще один дополнительный технический результат, заключающийся в повышении безопасности полета полезной нагрузки. Следует отметить, что повышенная безопасность полета полета полезной нагрузки также обусловлена наличием возможности смены любого беспилотного летательного аппарата, разъемно пристыкованного к полезной нагрузке, на другой беспилотный летательный аппарат прямо в воздухе, то есть без необходимости в посадке этой полезной нагрузки для восполнения запаса хода заменяемого беспилотного летательного аппарата.
Дополнительные преимущества заявленной группы изобретений и отдельных изобретений в указанной группе, в том числе их частных вариантов реализации, описанных в данном документе или охарактеризованных в зависимых пунктах формулы изобретения, будут ясны специалисту из приведенного ниже подробного описания настоящего изобретения и прилагаемых чертежей, со ссылкой на которые более подробно описаны ниже различные варианты реализации настоящего изобретения.
Кроме того, вышеописанные первый, второй, третий и четвертый аспекты настоящего изобретения обеспечивают каждый еще один дополнительный технический результат, заключающийся расширении арсенала транспортных средств, способных переместить или доставить пользователя/груз по воздуху в целевое место.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые приведены для обеспечения лучшего понимания сущности настоящего изобретения, составляют часть настоящего документа и включены в него для иллюстрации нижеописанных вариантов реализации и аспектов настоящего изобретения. Прилагаемые чертежи в сочетании с приведенным ниже описанием служат для пояснения сущности настоящего изобретения. На чертежах:
на фиг. 1 показан один из иллюстративных вариантов реализации воздушной транспортной системы согласно настоящему изобретению, находящаяся в состоянии, в котором заменяющий беспилотный летательный аппарат подлетел к полезной нагрузке для замены заменяемого беспилотного летательного аппарата, ранее разъемно состыкованного с полезной нагрузкой;
на фиг. 2 показан вид сверху в разрезе, иллюстрирующий основные конструктивные элементы полезной нагрузки и беспилотного летательного аппарата, задействованные в процессе стыковки этого беспилотного летательного аппарата с данной полезной нагрузкой;
на фиг. 3 показан увеличенный вид сверху в разрезе, иллюстрирующий основные конструктивные элементы полезной нагрузки и беспилотного летательного аппарата, задействованные в процессе стыковки этого беспилотного летательного аппарата с данной полезной нагрузкой только с одной из сторон корпуса полезной нагрузки;
на фиг. 4 показан вид с торца, иллюстрирующий беспилотный летательный аппарат, состыкованный с модулем стыковки полезной нагрузки;
на фиг. 5 показана воздушная транспортная система согласно настоящему изобретению по фиг. 1 в состоянии, в котором заменяющий беспилотный летательный аппарат состыковался с полезной нагрузкой и вошел во взаимодействие с заменяемым беспилотным летательным аппаратом, ранее разъемно состыкованным с полезной нагрузкой, для замены этого заменяемого беспилотного летательного аппарата; и
на фиг. 6 показана воздушная транспортная система согласно настоящему изобретению по фиг. 1 в состоянии, в котором заменяющий беспилотный летательный аппарат остался в целевом местоположении на полезной нагрузке, а заменяемый беспилотный летательный аппарат, ранее разъемно состыкованный с полезной нагрузкой, вышел из взаимодействия с полезной нагрузкой в результате воздействия на него заменяющего беспилотного летательного аппарата.
ОСУЩЕСТВЛЕНИЕ
Ниже со ссылкой на прилагаемые чертежи описаны некоторые примеры возможных вариантов реализации настоящего изобретения, при этом не следует считать, что приведенное ниже описание определяет или ограничивает объем настоящего изобретения.
В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения.
Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В частности, в контексте настоящего изобретения, если в описании настоящего документа явно не указано иное, термины «первый», «второй», «третий» или т.п. использованы для того, чтобы отличать друг от друга элементы, компоненты, части, узлы, модули, блоки, варианты реализации или т.п., к которым они относятся, а не для целей описания какой-либо конкретной взаимосвязи между ними.
Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста настоящего документа.
Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом следует понимать, что термин «или» в целом означает «и/или» и т.п.
Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п. в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации.
Все примеры, приведенные в данном документе, или по меньшей мере часть из них, равно как и соответствующие слововыражения («например», «такой как», «в частности» или т.п.), по существу использованы для улучшения понимания сущности настоящего изобретения и для обеспечения полноты раскрытия настоящего изобретения, однако эти слововыражения не накладывают каких-либо ограничений на варианты реализации настоящего изобретения, для описания которых они использованы в настоящем документе, в частности не ограничивают практические варианты реализации элементов, компонентов, частей, узлов, модулей, блоков, устройств, средств и/или т.п., используемых для раскрытия особенностей конструкции, функционирования (работы) и/или эксплуатации настоящего изобретения.
Термины и определения, примененные в описании данного документа
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, схема «выполнена с возможностью» осуществлять функцию во всех случаях, когда эта схема содержит необходимые аппаратные средства и код (если какой-либо код необходим) для осуществления функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки и т.п.).
В контексте настоящего изобретения термин «соответствие» и его производные (т.е. прилагательное, глагол, наречие) не обязательно означает точную согласованность или точное равенство в чем-либо, чему-либо или между чем-либо в каком-либо отношении, а может подразумевать отхождение или отклонение от указанного равенства в заданных пределах. Например, термин «соответствующие координаты», если из описания настоящего документа явно не следует иное, означает не только, что эти координаты могут быть точно равны друг другу или могут точно совпадать, но и подразумевает, что указанное равенство или совпадение координат может быть установлено с некоторой погрешностью (например, с погрешностью работы GPS-системы) или в рамках заданной географической области, окружающей точную географическую точку или область, на которую указывают эти координаты, или точное географическое место, на которое указывают эти координаты.
В контексте настоящего изобретения термин «беспилотный летательный аппарат» (БПЛА), если из описания настоящего документа явно не следует иное, относится к беспилотному воздушному транспортному средству, которое выполнено с возможностью полета или которое способно осуществлять перемещение по воздуху в автоматическом режиме, т.е. без участия человека или внешних источников управления, или способно осуществлять перемещение по воздуху в полуавтоматическом режиме, т.е. получать по меньшей мере часть управляющих команд от человека (например, пилота, оператора или т.п.) или внешнего источника (например, пульта управления, сервера управления, внешнего управляющего устройства или т.п.) по заданным каналам связи. Неограничивающими примерами БПЛА являются различные мультироторные БПЛА (например, мультикоптерные дроны), однороторные БПЛА (например, беспилотный вертолет), гибридные БПЛА (например, дроны с роторами и крыльями) и т.п.
В контексте настоящего изобретения термин «корпус», если из описания настоящего документа явно не следует иное, относится к каркасу, остову, оболочке, обшивке, фюзеляжу, несущей опоре или телу физического неживого объекта, каждый из которых может быть образован из одиночного опорного элемента или совокупности соединенных между собой опорных элементов, при этом тип, форма, габаритные размеры, конструктивные особенности и/или материал такого корпуса никак конкретно не ограничены.
В контексте настоящего изобретения термин «полезная нагрузка», если из описания настоящего документа явно не следует иное, относится к людям или живым существам (в частности, к людям или живым существам как к таковым, либо к людям или живым существам, помещенным в капсулу, кабину, жилой модуль, криомодуль, спасательный модуль, жилой отсек, жилой блок и т.п.) или к грузу (к грузу как таковому, либо к грузу, помещенному в ящики, коробки, упаковки, мешки, контейнеры, резервуары, сосуды, баки, канистры, вместилища, бочки, цистерны, баллоны, сосуды, резервуары, тары, бутылки, склянки, стеклотары, баллоны, боксы, модули хранения и т.п.), которые могут быть размещены в корпусе транспортного средства, выполняющего функцию носителя и предназначенного для доставки, перевозки или транспортировки людей, различных живых существ и/или различных грузов по воздуху, по земле (суше), по воде и/или под водой.
В контексте настоящего изобретения термин «модуль», если из описания настоящего документа явно не следует иное, относится к функциональному элементу или совокупности функциональных элементов устройства в виде детали, узла, блока или др. сборочной единицы, которая выполняет определенные технические функции, обеспечивающие выполнение функций устройства. Модуль в целом может быть реализован на практике с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и известных аппаратных средств, сочетания известных конструктивных элементов и известных программно-аппаратных средств или сочетания известных аппаратных средств и известных программных средств. Так, например, управляющее устройство может быть реализован с использованием программно-аппаратных средств. В контексте настоящего изобретения управляющее устройство может представлять собой физическое устройство, аппарат или множеством модулей, выполненных с использованием аппаратного обеспечения, например, с помощью, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функциональные возможности управляющего устройства, которые (при выполнении) трансформируют микропроцессорную систему в устройство или систему специального назначения (например, автопилот). Кроме того, каждый из модулей, описанных в данном документе, или по меньшей мере один из них может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля, могут быть реализованы путем использования аппаратного обеспечения в сочетании с программным обеспечением. Кроме того, в контексте настоящего изобретения модуль 130 стыковки может быть выполнен с возможностью разъемного взаимодействия по меньшей мере с одним беспилотным летательным аппаратам, при этом модуль 130 стыковки может быть реализован с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и аппаратных средств, сочетания конструктивных элементов и программно-аппаратных средств или сочетания аппаратных средств и программных средств.
В контексте настоящего изобретения термин «навигационная команда», если из описания настоящего документа явно не следует иное, относится к инструкции, направляемой летательным аппаратам, входящим в состав полезной нагрузки 100. Навигационные команды могут быть выданы или обеспечены системой управления перемещением летательных аппаратов в виде цифровых или аналоговых данных, инструкций, управляющих сигналов или т.п. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автооператором, оператором (как локально, так и удаленно) и/или системой обхода препятствий. В частности, навигационные команды могут быть приняты, например, блоком управления для управления летательным аппаратом, входящим в состав одного из беспилотных летательных аппаратов в системе для перемещения полезной нагрузки.
В контексте настоящего изобретения термин «ручное управление», если из описания настоящего документа явно не следует иное, относится не только к управлению исключительно с помощью рук человека, но и с помощью ног, пальцев, голоса, зрачков человека или их любого подходящего сочетания. Таким образом, в контексте настоящего изобретения термин «орган ручного управления» относится по меньшей мере к одному из следующего: кнопки, рычаги, джойстики, тумблеры, педали, сенсорный экран, сенсоры для управления жестами, сканеры для отслеживания движения зрачков, микрофон и/или т.п.
В контексте настоящего изобретения термин «зарядное устройство», если из описания настоящего документа явно не следует иное, относится к устройству для восполнения запаса хода летательного аппарата путем подзарядки его аккумуляторной батареи и/или путем восполнения его запаса топлива.
В контексте настоящего изобретения термин «база данных», если из описания настоящего документа явно не следует иное, подразумевает под собой любой структурированный набор данных, не зависящий от конкретной структуры, программного обеспечения по управлению базой данных, аппаратного обеспечения компьютера, на котором данные хранятся, используются или иным образом оказываются доступны для использования. База данных может находиться на том же оборудовании, выполняющем процесс, который сохраняет или использует информацию, хранящуюся в базе данных, или же она может находиться на отдельном оборудовании, например, выделенном сервере или на множестве серверов.
В контексте настоящего изобретения термин «парковочная станция», если из описания настоящего документа явно не следует иное, означает неподвижную или подвижную конструкцию, приспособленную для размещения, хранения и/или восполнения запаса хода (например, подзарядки) в ней транспортных средств.
В контексте настоящего изобретения термин «управляющее устройство» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «управляющее устройство» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же управляющим устройством (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких управляющих устройств.
В контексте настоящего изобретения термин «сервер» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «сервер» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же сервером (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких серверов.
Воздушная транспортная система
На фиг. 1 показан один из иллюстративных вариантов реализации воздушной транспортной системы 1000 согласно настоящему изобретению, в состав которой входит полезная нагрузка 100 согласно настоящему изобретению, содержащая корпус 110 для пользователя, который имеет вид кабины и который выполнен с возможностью размещения в нем или на нем пользователя, и два беспилотных летательных аппарата 200, каждый из которых выполнен с возможностью входа в разъемное взаимодействие, возможностью разъемного соединения или возможностью разъемной состыковки с корпусом 110 с обеспечением возможности перемещения по воздуху корпуса 110 и, следовательно, самой полезной нагрузки 100.
Следует отметить, что беспилотные летательные аппараты 200, разъемно состыкованные с корпусом 100 полезной нагрузки, образуют функциональную группу летательных аппаратов, обеспечивающую возможность перемещения корпуса 110 полезной нагрузки по воздуху под управлением управляющего устройства, входящего в состав полезной нагрузки 100, при этом управляющее устройство полезной нагрузки 100 может быть установлено в корпусе 110 полезной нагрузки или на нем.
В одном из вариантов реализации настоящего изобретения к корпусу 110 полезной нагрузки с его внешней стороны могут быть одновременно разъемно пристыкованы один или более беспилотных летательных аппаратов 200 (например, один, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более беспилотных летательных аппаратов 200 в зависимости целевой несущей способности полезной нагрузки 100 и размеров ее корпуса 110), входящих в состав воздушной транспортной системы 1000, при этом указанные пристыкованные беспилотные летательные аппараты 200 могут находиться с одной и той же стороны корпуса 110 полезной нагрузки или с разных сторон корпуса 110 полезной нагрузки. В одной из разновидностей данного варианта реализации настоящего изобретения, в которой к корпусу 110 полезной нагрузки могут быть пристыкованы два или более беспилотных летательных аппаратов 200, по меньшей мере два или часть из указанных летательных аппаратов 200 могут образовывать функциональную группу летательных аппаратов, в которой входящие в ее состав летательные аппараты 200 работают под управлением управляющего устройства полезной нагрузки 100 с обеспечением возможности перемещения полезной нагрузки 100 по воздуху. В другой разновидности данного варианта реализации настоящего изобретения, в которой к корпусу 110 полезной нагрузки могут быть пристыкованы два или более беспилотных летательных аппаратов 200, каждый из которых может работать под управлением собственного управляющего устройства, входящего в состав указанного беспилотного летательного аппарата 200.
В другом варианте реализации настоящего изобретения корпус 110 полезной нагрузки может быть предварительно снабжен одним или более беспилотными летательными аппаратами, которые могут быть жестко или неразъемно соединены с корпусом 110 полезной нагрузки (например, с использованием сварки, пайки или известных в уровне техники крепежных средств) и которые могут также входить в состав воздушной транспортной системы 1000, при этом по меньшей мере один или каждый из указанных летательных аппаратов, предварительно соединенных с корпусом 110, может быть в целом выполнен аналогично летательному аппарату 200, или может представлять собой летательный аппарат 200. В одной из разновидностей данного варианта реализации настоящего изобретения к корпусу 110 полезной нагрузки могут быть пристыкованы один или более беспилотных летательных аппаратов 200, при этом указанные пристыкованные летательные аппараты 200 и летательные аппараты, предварительно соединенные с корпусом 110, могут образовывать один или более составных летательных аппаратов, работающих каждый под управлением управляющего устройства полезной нагрузки 100, или могут быть работать каждый независимо друг от друга под управлением своего собственного встроенного управляющего устройства. В другой разновидности данного варианта реализации настоящего изобретения один или более беспилотных летательных аппаратов 200 могут быть пристыкованы по меньшей мере к одному из беспилотных летательных аппаратов, предварительно соединенных с корпусом 110, с образованием составного летательного аппарата, работающего под управлением управляющего устройства полезной нагрузки 100. Еще в одной разновидности данного варианта реализации настоящего изобретения к корпусу 110 полезной нагрузки могут быть предварительно разъемно пристыкованы один или более беспилотных летательных аппаратов 200, при этом по меньшей мере к одному из указанных предварительно пристыкованных беспилотных летательных аппаратов 200 может быть дополнительно пристыкован по меньшей мере один дополнительный беспилотный летательный аппарат 200 с образованием составного летательного аппарата, работающего под управлением управляющего устройства полезной нагрузки 100.
Еще в одном варианте реализации настоящего изобретения по меньшей мере один или каждый из беспилотных летательных аппаратов 200, которые могут быть пристыкованы к корпусу 110 полезной нагрузки и которые входят в состав воздушной транспортной системы 1000, может представлять собой составной беспилотный летательный аппарат, сформированный или образованный из двух или более состыкованных или соединенных между собой летательных аппаратов, при этом в составе каждого такого составного летательного аппарата могут быть летательные аппараты одного и того же типа или разных типов. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере один или каждый из беспилотных летательных аппаратов 200, которые могут быть пристыкованы к корпусу 110 полезной нагрузки, может быть выполнен в виде двух или более состыкованных или соединенных между собой составных летательных аппаратов, при этом каждый такой составной летательный аппарат может быть образован из двух или более состыкованных или соединенных между собой летательных аппаратов, имеющих один и тот же тип или разные типы, при этом типы летательных аппаратов, входящих в состав разных составных летательных аппаратов, могут (полностью или по меньшей мере частично) совпадать друг с другом или могут (полностью или по меньшей мере частично) отличаться друг от друга.
Следует отметить, что в вариантах реализации настоящего изобретения, описанных в данном документе, тип, форма, геометрические размеры, материалы изготовления любого из беспилотных летательных аппаратов 200, которые входят в состав воздушной транспортной системы 1000 и которые должны быть пристыкованы к корпусу 110 полезной нагрузки, ничем конкретно не ограничены.
Каждый из беспилотных летательных аппаратов 200, которые входят в состав воздушной транспортной системы 1000 и которые должны быть пристыкованы к корпусу 110 полезной нагрузки, может быть реализован в виде любого подходящего беспилотного летательного аппарата (БПЛА), известного в уровне техники и выполненного с возможностью взлета в воздух, перемещения по воздуху (полета) и посадки в автоматическом режиме (т.е. в режиме автопилота, который не предусматривает какого-либо участия человека в процессе управления работой летательного аппарата и/или который не предусматривает получения летательным аппаратом каких-либо управляющих или навигационных команд от одного или более внешних источников управления) или в полуавтоматическом режиме (т.е. в режиме, который предусматривает возможность использования автопилота, а также возможность участия человека в процессе управления работой летательного аппарата и/или возможность получения летательным аппаратом каких-либо управляющих или навигационных команд от одного или более внешних источников управления). Следует отметить, что в случае работы в полуавтоматическом режиме любой из беспилотных летательных аппаратов 200, которые должны быть пристыкованы к корпусу 110 полезной нагрузки, может получать по меньшей мере часть управляющих команд от человека, например, от пилота, оператора или т.п., или от внешнего источника управления, например, пульта управления, сервера управления, внешнего управляющего устройства или т.п.) по заданным каналам связи. В частности, неограничивающими примерами таких БПЛА, в виде одного из которых может быть выполнен любой из беспилотных летательных аппаратов 200, являются различные мультироторные БПЛА (например, мультикоптерные дроны), однороторные БПЛА (например, беспилотные вертолеты), гибридные БПЛА (например, дроны с роторами и крыльями) или т.п.
Как показано на фиг. 1, один из двух беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, состыкован с корпусом 110 полезной нагрузки, а другой летательный аппарат 200 из указанных двух летательных аппаратов 200 находится в воздухе в области пространства, соответствующей полезной нагрузке 100, и готов осуществить стыковку с корпусом 110 полезной нагрузки.
Согласно одному из вариантов реализации настоящего изобретения, беспилотный летательный аппарат 200, находящийся в воздухе в области пространства, соответствующей полезной нагрузке 100, и готовый осуществить стыковку с корпусом 110 полезной нагрузки, может быть дополнительно разъемно или неразъемно состыкован с другим летательным аппаратом 200, ранее состыкованным с корпусом 110 полезной нагрузки, в процессе пристыковки к корпусу 110 полезной нагрузки с образованием составного беспилотного летательного аппарата, при этом оба беспилотных летательных аппарата 200, образующих указанный составной беспилотный летательный аппарат, оказываются разъемно состыкованными с корпусом 110 полезной нагрузки с обеспечением возможности перемещения полезной нагрузки 100 по воздуху под управлением управляющего устройства полезной нагрузки 100, управляющего устройства по меньшей мере одного из указанных беспилотных летательных аппаратов 200, состыкованных с корпусом 110 полезной нагрузки, или внешнего управляющего устройства.
Как показано на фиг. 1, каждый из беспилотных летательных аппаратов 200 содержит фюзеляж или корпус 210 любого подходящего типа, снабженный двумя воздушными движителями 220, каждый из которых съемно или неразъемно установлен с одной из двух противоположных сторон корпуса 210 и в состав каждого из которых входят один или более воздушных винтов (например, один, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более воздушных винтов, которые или по меньшей мере часть из которых установлены в одной плоскости, в разных плоскостях или в параллельных плоскостях). На Фиг. 1-6 показан вариант осуществления, согласно которому каждый из воздушных движителей 220 беспилотного летательного аппарата 200 содержат по два воздушных винта с образованием беспилотного летательного аппарата 200 в виде квадрокоптера. При этом, в других вариантах осуществления воздушные движители 220 могут содержать иное количество воздушных винтов, например, один, три, четыре, пять, шесть, семь и более, с образованием беспилотного летательного аппарата 200 в виде мультикоптера. Беспилотный летательный аппарат 200 в отдельных вариантах осуществления может включать и более двух воздушных движителей 220, каждый из которых может содержать один или более воздушных винтов. Так, например, беспилотный летательный аппарат 200 может содержать четыре воздушных движителя 220, каждый из которых содержит по одному воздушному винту с получением системы, аналогичной иллюстративному примеру, показанному на фиг. 1-6. Количество воздушных движителей 220 в отдельных вариантах осуществления может составлять два, и более (например, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более воздушных движителей 220), каждый из которых содержит один или более воздушных винтов (например, один, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более воздушных винтов, которые или по меньшей мере часть из которых установлены в одной плоскости, в разных плоскостях или в параллельных плоскостях). Следует отметить, что корпус 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, имеет форму рамы или каркаса, конструктивные элементы которого соединены между собой с образованием полости или полого пространства между укороченными стенками корпуса 210, снабженными воздушными движителями 220. Кроме того, каждый из беспилотных летательных аппаратов 200, разъемно соединенных с корпусом 110 полезной нагрузки, содержит управляющее устройство, выполненное с возможностью управления работой такого беспилотного летательного аппарата 200. В частности, управляющее устройство в каждом из беспилотных летательных аппаратов соединено с возможностью обмена данными с воздушными движителями 220 с обеспечением возможности управления их работой, в частности возможности управления работой воздушных винтов (в частности, возможности включения, выключения или изменения рабочих характеристик воздушных винтов, таких как, например, скорость вращения или направление вращения), входящих в состав каждого из указанных воздушных движителей 220, что обеспечивает возможность полета или перемещения по воздуху указанного беспилотного летательного аппарата 200. Следует отметить, что управляющее устройство в каждом из беспилотных летательных аппаратов 200, разъемно соединенных с корпусом 110 полезной нагрузки, может управлять работой указанного беспилотного летательного аппарата 200, в том числе работой его воздушных движителей 220, в ответ на управляющие инструкции управляющего устройства полезной нагрузки 100 или внешнего управляющего устройства (например, управляющего сервера для управления работой летательных аппаратов).
Следует отметить, что каждый из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, выполнен с возможностью отстыковки или отсоединения от корпуса 110 полезной нагрузки в ответ на управляющие инструкции, принятые управляющим устройством указанного беспилотного летательного аппарата 200 от управляющего устройства полезной нагрузки 100 или внешнего управляющего устройства.
Как показано на фиг. 1, корпус 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть снабжен одним или более воздушными движителями 220 (например, одним, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью или более воздушными движителями 220), разъемно соединенными с корпусом 210 (т.е. с возможностью отсоединения от корпуса 210) или жестко соединенными с корпусом 210 (т.е. без возможности отсоединения от корпуса 210) с обеспечением возможности, при приведении их в действие, полета или перемещения по воздуху указанного беспилотного летательного аппарата 200, при этом каждый из указанных воздушных движителей 220 может быть установлен с одной из сторон корпуса 210 (например, со стороны верхней части корпуса 210, со стороны нижней части корпуса 210 или с одной из боковых сторон корпуса 210). Следует отметить, что в данном варианте реализации настоящего изобретения в состав по меньшей мере одного или каждого из воздушных движителей 220 могут входить один или более воздушных винтов, которые или по меньшей мере часть из которых могут быть приведены в действие с обеспечением возможности их вращения в одном и том же направлении вращения или разных направлениях вращения и/или возможности их вращения с одной и той же скоростью вращения или разными скоростями вращения. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере в одной или каждом из беспилотных летательных аппаратов 200 все воздушные движители 220 или по меньшей мере часть из них могут быть установлены с одной и то же стороны корпуса 210 или с разных сторон корпуса 210 с обеспечением, при приведении в действие всех таких воздушных движителей 220 или по меньшей мере части из них, возможности полета или перемещения по воздуху указанного беспилотного летательного аппарата 200 по заданной траектории перемещения или в заданном направлении.
В другом варианте реализации настоящего изобретения корпус 210 по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть снабжен двумя или более воздушными движителями 220, которые могут быть съемно или жестко установлены с одной из сторон корпуса 210 вплотную друг к другу или на заданном расстоянии друг от друга и в состав каждого из которых могут входить один или более воздушных винтов (например, один, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более воздушных винтов), что обеспечивает, при приведении в действие всех воздушных винтов или только по меньшей мере части из них по меньшей мере в одном или каждом из указанных воздушных движителей 220, возможности полета или перемещения по воздуху указанного беспилотного летательного аппарата 200.
В некоторых вариантах реализации настоящего изобретения корпус 210 по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть снабжен одним или более воздушными движителями 220, по меньшей мере один или каждый из которых может быть полностью или по меньшей мере частично установлен в корпусе 210 с возможностью выдвижения, раскладывания или развертывания из него под управлением управляющего устройства указанного беспилотного летательного аппарата 200, в том числе в ответ на управляющие команды управляющего устройства полезной нагрузки 100 или внешнего управляющего устройства.
Управляющее устройство, входящее в состав каждого из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть установлено внутри или снаружи корпуса 210 с обеспечением возможности управления работой указанного беспилотного летательного аппарата 200, в том числе работой воздушных винтов в воздушных движителях 220, которыми снабжен корпус 210. Таким образом, управляющее устройство летательного аппарата 200 выполнено с возможностью выдачи управляющих команд по меньшей мере на один или каждый из воздушных движителей 220 с обеспечением возможности приведения его в действие, что обеспечивает возможность полета или перемещения по воздуху указанного беспилотного летательного аппарата 200. Следует отметить, что одновременная работа всех воздушных движителей 220 или по меньшей мере их большей части по меньшей мере в одном или каждом из воздушных движителей 220, которыми снабжен корпус 210 по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, повышает несущую способность указанного беспилотного летательного аппарата 200 и, следовательно, полезной нагрузки 100 в целом. В одном из вариантов реализации настоящего изобретения все воздушные движители 220 или по меньшей мере часть из них по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, могут быть приведены в действие последовательно или по существу одновременно с использованием управляющего устройства указанного беспилотного летательного аппарата 200. В другом варианте реализации настоящего изобретения все воздушные винты или по меньшей мере часть из них по меньшей мере в одном или каждом из воздушных движителей 220, которыми снабжен корпус 210 по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, могут быть приведены в действие посредством управляющего устройства указанного беспилотного летательного аппарата 200 с обеспечением возможности их вращения в одном и том же направлении или в разных направлениях. Еще в одном варианте реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 220, которыми снабжен корпус 210 по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть выполнен с возможностью поворота вокруг своей оси на заданный угол под управлением управляющего устройства указанного беспилотного летательного аппарата 200 или возможностью смещения по отношению к корпусу 210 указанного беспилотного летательного аппарата 200.
Согласно еще одному варианту реализации настоящего изобретения управляющее устройство по меньшей мере одного из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может выполнять функции управляющего устройства полезной нагрузки 100, то есть указанное управляющее устройство летательного аппарата 200 может представлять собой управляющий модуль полезной нагрузки 100, выдающий управляющие команды на функциональные компоненты полезной нагрузки 100. В одной из разновидностей данного варианта реализации настоящего изобретения управляющие функции управляющего устройства полезной нагрузки 100 могут быть распределены между управляющими устройствами летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, так что указанные управляющие устройства летательных аппаратов 200, используемые в комбинации или в сочетании друг с другом, могут образовывать управляющее устройство полезной нагрузки 100.
Кроме того, в состав каждого из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, показанной на фиг. 1, входит по меньшей мере одно из следующих средств беспроводной связи: радиоантенна KB диапазона, радиоантенна УКВ диапазона, радиоантенна СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль беспроводной связи, модуль проводной связи и т.п., что позволяет каждому из беспилотных летательных аппаратов 200 принимать навигационные команды и/или управляющие команды от управляющего устройства полезной нагрузки 100 и, следовательно, позволяет управляющему устройству полезной нагрузки 100 управлять работой указанного беспилотного летательного аппарата 200. Следует отметить, что навигационные команды и/или управляющие команды, принимаемые любым из беспилотных летательных аппаратов 200 от управляющего устройства полезной нагрузки 100 с использованием средств беспроводной связи указанного беспилотного летательного аппарата 200, передаются от указанных средств беспроводной связи летательного аппарата 200 на управляющее устройство летательного аппарата 200 для их обработки этим управляющим устройством летательного аппарата 200.
В некоторых вариантах реализации настоящего изобретения по меньшей мере один или каждый из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть функционально соединен с управляющим устройством полезной нагрузки 100 проводным способом с обеспечением возможности обмена данными друг с другом.
В свою очередь управляющее устройство полезной нагрузки 100 в составе воздушной транспортной системы 1000, показанной на фиг. 1, выполнено с возможностью получения и обработки данных (в том числе системных запросов) от каждого из беспилотных летательных аппаратов 200, а также выполнено с возможностью генерирования управляющих инструкций/команд и/или с возможностью генерирования навигационных инструкций/команд на основании указанных полученных данных и результатов их обработки с обеспечением возможности выдачи или направления таких сгенерированных управляющих команд и/или навигационных команд по меньшей мере на один или каждый из указанных летательных аппаратов 200, в том числе в ответ на запрос указанного беспилотного летательного аппарата 200. Для выдачи навигационных команд и/или управляющих команд по меньшей мере на один или каждый из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, управляющее устройство полезной нагрузки 100 соединено, посредством сети беспроводной связи (не показана), с указанным летательным аппаратом 200 с возможностью обмена с ним данными.
Управляющее устройство по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, показанной на фиг. 1, соединено с возможностью обмена данными с вышеописанными средствами беспроводной связи указанного беспилотного летательного аппарата 200, что позволяет указанному управляющему устройству летательного аппарата 200 обрабатывать навигационные команды и/или управляющие команды, принятые средствами беспроводной связи летательного аппарата 200 от управляющего устройства полезной нагрузки 100 при установлении между ними канала беспроводной связи, и позволяет управлять работой летательного аппарата 200 в зависимости от указанных навигационных команд и/или управляющих команд. В частности, в ответ на навигационные команды и/или управляющие команды от управляющего устройства полезной нагрузки 100 управляющее устройство летательного аппарата 200 может обеспечивать, например, возможность выполнения по меньшей мере одной из следующих операций: (i) изменение скорости полета летательного аппарата 200, (ii) изменение направления полета летательного аппарата 200, (iii) направление летательного аппарата 200 из парковочной станции (не показана) или текущей области воздушного пространства в целевую область воздушного пространства, в которой предполагается разъемно пристыковать или присоединить летательный аппарат 200 к корпусу 110 полезной нагрузки; (iv) осуществление стыковки или соединения беспилотного летательного аппарата 200 с корпусом 110 полезной нагрузки; (v) осуществление отстыковки или отсоединения беспилотного летательного аппарата 200 от корпуса 110 полезной нагрузки; (vi) перемещение беспилотного летательного аппарата 200 по отношению или вдоль корпуса 110 полезной нагрузки и (vii) направление летательного аппарата 200 на одну из парковочных станций (не показаны) для размещения в ней или на ней с обеспечением возможности хранения указанного беспилотного летательного аппарата 200 в указанной парковочной станции и/или с обеспечением возможности восполнения запаса хода (зарядки) указанного беспилотного летательного аппарата 200.
В различных вариантах реализации настоящего изобретения управляющее устройство (не показано) может и не входить в состав полезной нагрузки 100. В таких вариантах реализации настоящего изобретения управляющее устройство полезной нагрузки 100, выдающее управляющие команды и/или навигационные команды на управляющее устройство по меньшей мере одного или каждого из беспилотных летательных аппаратов 200, может представлять собой одиночный сервер, который может быть выполнен в виде, например, сервера Dell™ PowerEdge™ с установленной на нем операционной системой Ubuntu Server или Windows Server. В различных других вариантах реализации настоящего изобретения функции управляющего устройства полезной нагрузки 100 могут быть разделены между несколькими удаленными компьютерными или вычислительными устройствами, например, могут быть реализованы с помощью нескольких серверов, соединенных между собой по сети связи с возможностью взаимного обмена данными.
В некоторых вариантах реализации настоящего изобретения протоколы передачи данных и/или технические средства, используемые для передачи данных или обмена данными между управляющим устройством полезной нагрузки 100 и летательными аппаратами 200, могут по меньшей мере частично отличаться друг от друга и/или могут по меньшей мере частично совпадать друг с другом. Кроме того, для передачи данных или обмена данными между управляющим устройством полезной нагрузки 100 и каждым летательным аппаратом 200 могут быть одновременно использованы один или более стандартных протоколов связи и соответствующих стандартных технических средств связи.
В отдельных вариантах реализации настоящего изобретения управляющее устройство полезной нагрузки 100 может быть выполнено с возможностью организации безопасности при полете или перемещении по воздуху по меньшей мере одного или каждого из беспилотных летательных аппаратов 200, которые должны быть пристыкованы или присоединены к корпусу 110 полезной нагрузки или которые отстыкованы или отсоединены от корпуса 110. В одной из разновидностей таких вариантов реализации настоящего изобретения управляющее устройство полезной нагрузки 100 может быть дополнительно выполнено с возможностью организации безопасности при полете или перемещении по воздуху полезной нагрузки 100 с помощью летательных аппаратов 200, пристыкованных или присоединенных к корпусу 110 полезной нагрузки.
Кроме того, управляющее устройство полезной нагрузки 100 может иметь или может получать доступ по меньшей мере к одной удаленной или внешней базе данных (не показана) по сети связи или иным (проводным или беспроводным) способом, либо может иметь или получать доступ по меньшей мере к одной локальной базе данных, хранящейся на запоминающем устройстве (не показано), которое может быть установлено в корпус 110, или в памяти (не показана), которая может входить в состав такого управляющего устройства полезной нагрузки 100.
В некоторых вариантах реализации настоящего изобретения управляющее устройство полезной нагрузки 100 может представлять собой любое другое подходящее аппаратное обеспечение, прикладное программное обеспечение, системное программное обеспечение или их любую комбинацию.
Сеть связи, с которой могут быть соединены с возможностью обмена данными управляющие устройства летательных аппаратов 200 и управляющее устройство полезной нагрузки 100, также позволяет управляющему устройству полезной нагрузки 100 и управляющим устройствам летательных аппаратов 200 обмениваться друг с другом системными и/или рабочими данными, которые они используют для реализации своих функций или функциональных возможностей, описанных в данном документе. Следует отметить, что сеть связи также позволяет управляющим устройствам летательных аппаратов 200 обмениваться между собой системными и/или рабочими данными, которые они также могут использовать для реализации своих функций или функциональных возможностей, описанных в данном документе. В качестве сети связи может быть использована, например, любая подходящая линия беспроводной связи, известная в уровне техники, например, линия связи на основе технологии беспроводной связи «Wi-Fi», линия связи на основе технологии беспроводной связи «2G», «3G», «4G» или «5G», сеть связи на основе технологии «LTE» и/или т.п.
В одном из вариантов реализации настоящего изобретения в состав воздушной транспортной системы 1000 могут входить две и более сетей беспроводной связи, выполненных каждая аналогично вышеописанной сети связи и используемых для осуществления взаимного обмена данными между управляющими устройствами летательных аппаратов 200, управляющим устройством полезной нагрузки 100, любыми иными функциональными устройствами, которые могут входить в состав воздушной транспортной системы 1000, и/или любыми функциональными компонентами, которые могут входить в состав полезной нагрузки 100 или в состав любого из указанных летательных аппаратов 200, в режиме реального времени или в реальном времени.
Каждый из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, содержит (собственный) встроенный источник питания (не показан), выполненный в виде аккумулятора, одной или более аккумуляторных батарей, генератора на основе двигателя внутреннего сгорания, генератора на основе водородного двигателя, генератора на основе одной или более солнечных батарей или генератора на основе любого иного подходящего источника энергии, известного в уровне техники, при этом такой встроенный источник питания может быть также выполнен с возможностью его подзарядки от внешнего источника питания (не показан) с использованием зарядного устройства (не показано) подходящего типа, подключенного к указанному внешнему источнику питания и выполненному с обеспечением возможности подключения к нему указанного встроенного источника питания. В частности, встроенный источник питания в каждом летательном аппарате 200 соединен, посредством схемы питания летательного аппарата 200, с управляющим устройством летательного аппарата 200 и любыми иными функциональными компонентами летательного аппарата 200, описанными в данном документе, с обеспечением возможности подачи на них питания или возможности их питания.
В другом варианте реализации настоящего изобретения встроенный источник питания по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть заряжен беспроводным способом с использованием внешнего зарядного устройства (не показано), в основе работы которого лежит принцип электромагнитной индукции, известный специалисту в данной области техники.
Согласно одному из вариантов реализации настоящего изобретения, управляющее устройство по меньшей мере одного или каждого из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может дополнительно обеспечивать возможность направления указанного беспилотного летательного аппарата 200 к парковочной станции (не показана). Такая парковочная станция может быть снабжена одним или более зарядными устройствами (не показаны), электрически соединенными каждый по меньшей мере с одним из источников питания парковочной станции и обеспечивающими каждое возможность подключения к нему летательного аппарата 200 по меньшей мере для частичной зарядки или по меньшей мере для частичного восполнения запаса хода указанного подключенного летательного аппарата 200, так что этот летательный аппарат 200 может перейти в состояние по меньшей мере с частично восполненным запасом хода или полностью восполненным запасом хода, что позволяет снова его разъемно пристыковать или присоединить к корпусу 110 полезной нагрузки.
Следует отметить, что в вариантах реализации настоящего изобретения, в которых беспилотный летательный аппарат 200 может быть подключен к одному или более зарядных устройств парковочной станции для его зарядки или восполнения его запаса хода, каждый из источников питания парковочной станции в данном варианте реализации настоящего изобретения может представлять собой одну или более аккумуляторных батарей, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники. Следует также отметить, что по меньшей мере одно или каждое из зарядных устройств (не показаны) парковочной станции в таких вариантах реализации настоящего изобретения может представлять собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию. В качестве альтернативы по меньшей мере одно или каждое из зарядных устройств парковочной станции может быть выполнено, например, в виде устройства для подачи электрической энергии, устройства для подачи жидкого или газообразного топлива и/или т.п. В качестве еще одной альтернативы по меньшей мере одно или каждое из зарядных устройств парковочной станции может быть гидравлически соединено с насосом (не показан), соединенным гидравлической линией с резервуаром или емкостью (не показана) с топливом с возможностью забора этого топлива из указанной емкости, с обеспечением возможности подачи указанного забранного объема топлива в топливный бак летательного аппарата 200, гидравлически соединенный с работающим на топливе двигателем летательного аппарата 200, что позволяет восполнить запас хода летательного аппарата 200 (в частности, благодаря по меньшей мере частичному восполнению объема топлива в топливном баке летательного аппарата 200).
В одном из вариантов реализации настоящего изобретения управляющее устройство по меньшей мере одного или каждого из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может дополнительно обеспечивать возможность разъемной стыковки или разъемного соединения указанного беспилотного летательного аппарата 200 с восполненным запасом хода с корпусом 110 полезной нагрузки взамен по меньшей мере одного из беспилотных летательных аппаратов 200 с недостаточным запасом хода или с запасом хода ниже заданного порогового значения, разъемно соединенных с корпусом 110 полезной нагрузки, или в дополнение к указанным летательным аппаратам 200 с недостаточным запасом хода или с запасом хода ниже заданного порогового значения, при этом полезная нагрузка 100 в течении указанного процесса стыковки может находиться в воздухе или на поверхности земли (или поверхности иного объекта, который в свою очередь может находиться на земле, на поверхности воды и/или в воздухе). В одной из разновидностей данного варианта реализации настоящего изобретения непосредственно самим процессом стыковки или разъемного соединения беспилотного летательного аппарата 200 с восполненным запасом хода с корпусом 110 полезной нагрузки может управлять управляющее устройство полезной нагрузки 100, выдающее управляющие команды и/или навигационные команды на управляющее устройство указанного беспилотного летательного аппарата 200.
Еще в одном варианте реализации настоящего изобретения при стыковке или соединении летательного аппарата 200 с корпусом 110 полезной нагрузки схема питания присоединенного летательного аппарата 200 может быть дополнительно электрически соединена со схемой питания полезной нагрузки 100 с образованием единой схемы питания (например, с использованием соединительного кабеля питания, который может быть пропущен внутри корпуса 110 полезной нагрузки или снаружи корпуса 110 полезной нагрузки и который может быть подключен к схеме питания летательного аппарата 200, выполненной в корпусе 210) и составного источника питания (например, такой составной источник питания может быть образован из аккумуляторных батарей летательного аппарата 200 и аккумуляторных батарей полезной нагрузки 100, размещенных в корпусе 110 полезной нагрузки), подающего питание или питающего все функциональные компоненты летательного аппарата 200 и полезной нагрузки 100 по существу одновременно, так что подзарядка одного из отдельных источников питания в составе такого составного источника питания от внешнего источника питания (не показан) с использованием зарядного устройства (не показано) подходящего типа позволяет говорить о зарядке всего составного источника питания. Следует отметить, что в таком варианте реализации настоящего изобретения запас хода одного или более беспилотных летательных аппаратов 200, соединенных с корпусом 110 полезной нагрузки, в целом может контролироваться управляющим устройством по меньшей мере одного из указанных летательных аппаратов 200 или управляющим устройством полезной нагрузки 100 путем отслеживания состояния составного источника питания (например, путем отслеживания остаточного заряда составной аккумуляторной батареи). В одной из разновидностей такого варианта реализации настоящего изобретения составной источник питания может быть подзаряжен от двух или более внешних источников питания (не показаны) с использованием двух или более зарядных устройств (не показаны) подходящего типа, которые могут быть электрически соединены каждый с соответствующим одним из указанных внешних источников питания и каждый из которых может быть выполнен с обеспечением возможности подключения к нему одного или более из источников питания, входящих в состав указанного составного источника питания, так что такой составной источник питания может быть по сути подзаряжен путем параллельной подзарядки его отдельных источников питания.
Как показано на фиг. 1-4, для обеспечения возможности создания разъемного соединения между корпусом 110 полезной нагрузки и беспилотным летательным аппаратом 200, входящим в состав воздушной транспортной системы 1000, корпус 210 летательного аппарата снабжен зубчатыми направляющими 230, а полезная нагрузка 100 снабжена модулем 130 стыковки со стыковочными механизмами 140, каждый из которых выполнен с возможностью входа в разъемное зубчатое взаимодействие с одной из зубчатых направляющих 230 при стыковке указанного беспилотного летательного аппарата 200 с полезной нагрузкой 100.
В частности, как показано на фиг. 1-4, корпус 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, снабжен двумя прямолинейными зубчатыми направляющими 230, выполненными за одно целое с корпусом 210 на заданном расстоянии друг от друга, при этом указанные зубчатые направляющие 230 расположены или проходят в целом параллельно друг другу и снабжены каждая рядом зубцов, в котором зубцы 240 выполнены с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одним из стыковочных механизмов 140 при стыковке указанного беспилотного летательного аппарата 200 с модулем 130 стыковки. Следует отметить, что протяженность или длина каждой из прямолинейных зубчатых направляющих 230 в целом равна протяженности или длине каждой из двух противоположных укороченных сторон корпуса 210, т.е. каждая из зубчатых направляющих 230 проходит по существу вдоль всей укороченной стороны корпуса 210, соответствующей указанной зубчатой направляющей 230. В одном из вариантов реализации настоящего изобретения протяженность или длина каждой из прямолинейных зубчатых направляющих 230 может быть равна протяженности соответствующей одной из двух противоположных укороченных сторон корпуса 210, может быть равна части протяженности каждой из двух противоположных укороченных сторон корпуса 210, может быть равна части протяженности соответствующей одной из двух противоположных укороченных сторон корпуса 210, может быть меньше протяженности соответствующей одной из двух противоположных укороченных сторон корпуса 210 или может быть меньше протяженности каждой из двух противоположных укороченных сторон корпуса 210.
Кроме того, как показано на фиг. 2-3, модуль 130 стыковки, которым снабжен корпус 110 в полезной нагрузке 100, входящей в состав воздушной транспортной системы 1000, снабжен двумя рядами стыковочных механизмов, каждый из которых содержит по три зубчатых стыковочных механизма 140, расположенных на равном или одинаковом расстоянии друг от друга и выполненных каждый с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одним из зубцов 240, выполненных на соответствующей одной из зубчатых направляющих 230, которыми снабжен корпус 210 летательного аппарата, при стыковке беспилотного летательного аппарата 200 с модулем 130 стыковки, при этом каждый из указанных двух рядов стыковочных механизмов установлен на соответствующей одной из двух противоположных удлиненных сторон модуля 130 стыковки.
Кроме того, как показано на фиг. 1 и 5-6, модуль 130 стыковки снабжен двумя воздушными движителями 120, образующими функциональную пару воздушных движителей, работающую под управлением управляющего устройства полезной нагрузки 100, при этом каждый из указанных воздушных движителей 120 закреплен с одной из двух противоположных укороченных сторон модуля 130 стыковки, которые проходят в целом перпендикулярно удлиненным сторонам модуля 130 стыковки. Управляющее устройство полезной нагрузки 100 выполнено с возможностью выдачи управляющих команд на воздушные движители 120, образующие вышеописанную функциональную пару воздушных движителей, для приведения в действие (включения) или выключения по меньшей мере одного или каждого из указанных воздушных движителей 120. Следует отметить, что по меньшей мере один или каждый из воздушных движителей 120, которыми снабжен модуль 130 стыковки, может быть приведен в действие под управлением управляющего устройства полезной нагрузки 100 до стыковки беспилотного летательного аппарата с корпусом 110 полезной нагрузки или после отстыковки беспилотного летательного аппарата от корпуса 110 полезной нагрузки, что позволяет обеспечивать возможность полета полезной нагрузки 100 в течение заданного периода времени либо вообще без использования беспилотных летательных аппаратов 200, которые входят в состав воздушной транспортной системы 1000 и которые должны быть пристыкованы к корпусу 110 полезной нагрузки для обеспечения возможности ее перемещения по воздуху, либо с использованием минимально необходимого количества беспилотных летательных аппаратов 200, пристыкованных к корпусу 110 полезной нагрузки. Следует также отметить, что по меньшей мере один или каждый из воздушных движителей 120, которыми снабжен модуль 130 стыковки, может быть приведен в действие под управлением управляющего устройства полезной нагрузки 100 при стыковке одного или более беспилотных летательных аппаратов 200 с модулем 130 стыковки и, следовательно, могут работать в дополнение по меньшей мере к одному из воздушных движителей 220 по меньшей мере одного или каждого из указанных пристыкованных беспилотных летательных аппаратов 200 или могут работать вместо по меньшей мере одного из воздушных движителей 220 по меньшей мере одного или каждого из указанных пристыкованных беспилотных летательных аппаратов 200.
В одном из вариантов реализации настоящего изобретения по меньшей мере с одной или по меньшей мере с каждой из двух противоположных сторон модуля 130 стыковки могут быть установлены один или более воздушных движителей 120 (например, один, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более воздушных движителей 120), при этом воздушные движители 120, расположенные с указанных противоположных сторон корпуса, могут образовывать меньшей мере одну функциональную пару воздушных движителей, работающую под управлением управляющего устройства полезной нагрузки 100. На Фиг. 1,5 и 6 показан вариант осуществления, согласно которому каждый из воздушных движителей 120 содержит по два воздушных винта При этом, в других вариантах осуществления воздушные движители 120 могут содержать иное количество воздушных винтов, например, один, три, четыре, пять, шесть, семь и более. Полезная нагрузка 100 в отдельных вариантах осуществления может включать и более двух воздушных движителей 120, каждый из которых может содержать один или более воздушных винтов. Так, например, полезная нагрузка 100 и/или модуль 130 стыковки могут содержать четыре воздушных движителя 120, каждый из которых содержит по одному воздушному винту с получением системы, аналогичной иллюстративному примеру, показанному на фиг. 1, 5 и 6. Количество воздушных движителей 120 в отдельных вариантах осуществления может составлять два, и более (например, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более воздушных движителей 120), каждый из которых содержит один или более воздушных винтов (например, один, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более воздушных винтов, которые или по меньшей мере часть из которых установлены в одной плоскости, в разных плоскостях или в параллельных плоскостях).
В другом варианте реализации настоящего изобретения корпус 110 полезной нагрузки может быть и не снабжен модулем 130 стыковки, а один или более воздушных движителей 120 и один или более зубчатых стыковочных механизмов 140, которыми должен быть снабжен корпус 110 полезной нагрузки, могут быть установлены непосредственно на самом корпусе 110 полезной нагрузки или могут быть выполнены за одно целое с ним.
Еще в одном варианте реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 120, которыми может быть снабжено тело модуля 130 стыковки или может быть снабжен корпус 110 полезной нагрузки, может быть выполнен с возможностью выдвижения, раскладывания или развертывания из корпуса 110 полезной нагрузки под управлением управляющего устройства полезной нагрузки 100.
В ином варианте реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 120, которыми может быть снабжен модуль 130 стыковки, может быть выполнен с возможностью изменения своего местоположения на стороне модуля 130 стыковки, с которой установлен указанный воздушный движитель 120.
В некотором ином варианте реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 120, которыми может быть снабжен корпус 110 полезной нагрузки, может быть выполнен с возможностью изменения своего местоположения на стороне корпуса 110 полезной нагрузки, с которой установлен указанный воздушный движитель 120. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 120, которыми может быть снабжен корпус 110 полезной нагрузки, может быть установлен с одной из сторон корпуса 110 полезной нагрузки на направляющей и может быть функционально соединен с приводным устройством или приводом полезной нагрузки 100, работающим под управлением управляющего устройства полезной нагрузки 100 с обеспечением возможности смещения или перемещения указанного воздушного движителя 120 по указанной направляющей на заданное расстояние, регулируемое управляющим устройством полезной нагрузки 100, в соответствии с заданным маршрутом перемещения, сохраненном в запоминающем устройстве полезной нагрузки 100, к которому имеет доступ или может получить доступ управляющее устройство полезной нагрузки 100. В другой разновидности данного варианта реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 120, которыми может быть снабжен корпус 110 полезной нагрузки, может быть установлен или закреплен с одной из сторон корпуса 110 полезной нагрузки на каретке, установленной на указанной стороне корпуса 110 полезной нагрузки и функционально соединенной с приводным устройством или приводом полезной нагрузки 100, работающим под управлением управляющего устройства полезной нагрузки 100 с обеспечением возможности смещения или перемещения указанной каретки по отношению к корпусу 110 полезной нагрузки на заданное расстояние, регулируемое управляющим устройством полезной нагрузки 100, в соответствии с заданным маршрутом перемещения, сохраненном в запоминающем устройстве полезной нагрузки 100, к которому имеет доступ или может получить доступ управляющее устройство полезной нагрузки 100.
Следует отметить, что расстояние между рядами стыковочных механизмов в модуле 130 стыковки по сути соответствует расстоянию между двумя прямолинейными зубчатыми направляющими 230, которыми снабжен корпус 210 в летательном аппарате 200, который входит в состав воздушной транспортной системы 1000 и который должен быть пристыкован к полезной нагрузке 100, что позволяет указанному летательному аппарату 200 легко пристыковаться к корпусу 110 полезной нагрузки путем по существу одновременного ввода каждой из двух прямолинейных зубчатых направляющих 230 в разъемное зубчатое взаимодействие с зубчатым стыковочным механизмом 140, относящимся к одному из двух рядов стыковочных механизмов корпуса ПО, соответствующему указанной прямолинейной зубчатой направляющей 230, и являющимся ближним или проксимальным по отношению к указанному подлежащему стыковке летательному аппарату 200.
При перемещении беспилотного летательного аппарата 200, состыкованного с модулем 130 стыковки, по отношению к корпусу 110 полезной нагрузки для занятия целевого местоположения (т.е. размещения в целевом месте) на корпусе 110 полезной нагрузки каждая из двух прямолинейных зубчатых направляющих 230 в разные моменты (периоды) времени оказывается последовательно введенной в разъемное зубчатое взаимодействие (i) только с ближним зубчатым стыковочным механизмом 140, относящимся к одному из двух рядов стыковочных механизмов корпуса 110, соответствующему указанной прямолинейной зубчатой направляющей 230, (ii) одновременно с указанным ближним зубчатым стыковочным механизмом 140 и средним зубчатым стыковочным механизмом 140, расположенным между указанным ближним зубчатым стыковочным механизмом 140 и дальним зубчатым стыковочным механизмом 140, наиболее удаленным от ближнего зубчатого стыковочного механизма 140, и (iii) только с указанным средним зубчатым стыковочным механизмом 140. Следует отметить, что управляющее устройство полезной нагрузки 100 функционально соединено с зубчатыми стыковочными механизмами 140 с обеспечением возможности управления их работой, в частности возможности изменения их рабочих параметров, например, скорости вращения, направления вращения и т.п., так что для занятия летательным аппаратом 200, состыкованным с модулем 130 стыковки, целевого местоположения (т.е. размещения в целевом месте) на корпусе 110 полезной нагрузки управляющее устройство полезной нагрузки 100 выдает управляющие команды на те зубчатые стыковочные механизмы из ближних и средних зубчатых стыковочных механизмов 140, которые должны быть задействованы в разные моменты (периоды) времени для обеспечения возможности перемещения указанного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки в указанное целевое местоположение. Таким образом, зубчатые стыковочные механизмы из ближних и средних зубчатых стыковочных механизмов 140, приведенные в действие в ответ на соответствующие управляющие команды управляющего устройства полезной нагрузки 100, совершают поворот в заданном направлении и с заданной скоростью поворота с обеспечением возможности ввода зубцов этих приведенных в действие стыковочных механизмов 140 в разъемное зубчатое взаимодействие с соответствующими зубцами 240, выполненными на соответствующих прямолинейных зубчатых направляющих 230, что обеспечивает возможность продвижения летательного аппарата 200 до целевого местоположения на корпусе 110 полезной нагрузки, известного управляющему устройству полезной нагрузки 100. Следует отметить, что корпус 110 полезной нагрузки может быть дополнительно снабжен датчиком контакта, который может быть выполнен с возможностью обнаружения или выявления стыковки беспилотного летательного аппарата 200 с корпусом 110 полезной нагрузки и который может быть соединен с возможностью обмена данными с управляющим устройством полезной нагрузки 100 с обеспечением возможности выдачи данных о выявленной стыковке на управляющее устройство полезной нагрузки 100 для приведения, посредством управляющего устройства полезной нагрузки 100, необходимых зубчатых стыковочных механизмов, которые должны обеспечить перемещение пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки для занятия своего целевого местоположения, контролируемого управляющим устройством полезной нагрузки 100.
В одном из вариантов реализации настоящего изобретения беспилотный летательный аппарат 200, пристыкованный к корпусу 110 полезной нагрузки, может быть перемещен по отношению к корпусу 110 полезной нагрузки в целевое местоположение на корпусе 110 полезной нагрузки под действием сил инерции (т.е. по инерции), сформированных на момент стыковки указанного беспилотного летательного аппарата 200 с корпусом 110 полезной нагрузки и достаточных для обеспечения по существу прямолинейного продвижения пристыкованного беспилотного летательного аппарата 200, прямолинейные зубчатые направляющие 230 которого были введены в разъемное зубчатое взаимодействие с соответствующими зубчатыми стыковочными механизмами 140, по отношению к корпусу 110 полезной нагрузки до целевого места на корпусе 110 полезной нагрузки. Таким образом, в данном варианте реализации настоящего изобретения силы инерции, которыми обладает беспилотный летательный аппарат 200 на момент его стыковки с корпусом 110 полезной нагрузки, являются достаточными для поворота зубчатых стыковочных механизмов 140, которыми снабжен корпус 110 полезной нагрузки, в заданном направлении с обеспечением возможности продвижения пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки до целевого места на корпусе 110 полезной нагрузки.
Как показано на фиг. 1, еще один или другой (второй) беспилотный летательный аппарат 200, входящий в состав воздушной транспортной системы 1000, может быть разъемно пристыкован к модулю 130 стыковки, уже снабженному беспилотным летательным аппаратом 200, также входящих в состав воздушной транспортной системы 1000 и ранее пристыкованным к модулю 130 стыковки, путем ввода каждой из двух прямолинейных зубчатых направляющих 230 в разъемное зубчатое взаимодействие с зубчатым стыковочным механизмом 140, относящимся к одному из двух рядов стыковочных механизмов корпуса 110, соответствующему указанной прямолинейной зубчатой направляющей 230, и являющимся ближним или проксимальным по отношению к указанному подлежащему стыковке летательному аппарату 200. Другими словами, в любой момент времени в системе 1000 еще один или другой (второй) беспилотный летательный аппарат 200 может быть пристыкован к модулю 130 стыковки в дополнение к ранее пристыкованному к нему беспилотному летательному аппарату 200, находящемуся на корпусе 110 полезной нагрузки в целевом местоположении.
Как показано на фиг. 5, при дальнейшем перемещении другого беспилотного летательного аппарата 200, дополнительно пристыкованного к модулю 130 стыковки, по отношению к корпусу 110 полезной нагрузки для занятия им своего целевого местоположения (т.е. размещения в целевом месте) на корпусе 110 полезной нагрузки каждая из двух прямолинейных зубчатых направляющих 230, относящихся к этому другому беспилотному летательному аппарату 200, в разные моменты (периоды) времени оказывается последовательно введенной в разъемное зубчатое взаимодействие с одним или более из зубчатых стыковочных механизмов 140, которыми снабжен стыковочный 130 модуль.
Как показано на фиг. 6, для занятия другим беспилотным летательным аппаратом 200 своего целевого местоположения на корпусе 110 полезной нагрузки обеспечена возможность продвижения этого другого беспилотного летательного аппарата 200 в сторону ранее пристыкованного беспилотного летательного аппарата 200 под управлением управляющего устройства полезной нагрузки 100 с последующим контактным воздействием указанного другого беспилотного летательного аппарата 200 на указанный ранее пристыкованный беспилотный летательный аппарат 200, при этом указанное контактное воздействие в свою очередь обеспечивает возможность размещения этого другого беспилотного летательного аппарата 200 в его целевом местоположении на корпусе 110 полезной нагрузки (например, в целевом местоположении на корпусе 110 полезной нагрузки, соответствующем целевому местоположению ранее пристыкованного беспилотного летательного аппарата 200), регулируемом или контролируемом управляющим устройством полезной нагрузки 100, и возможность дальнейшего продвижения указанного ранее пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки с последующим выводом указанного ранее пристыкованного беспилотного летательного аппарата 200 из взаимодействия с соответствующими стыковочными механизмами 140, в результате которого этот ранее пристыкованный беспилотный летательный аппарат 200 оказывается отстыкованным от модуля 130 стыковки и, следовательно, от корпуса 110 полезной нагрузки. Следует отметить, что управление работой беспилотного летательного аппарата 200, отстыкованного от полезной нагрузки 100, может быть переключено на управляющее устройство этого отстыкованного беспилотного летательного аппарата 200 или внешнее управляющее устройство. Следует отметить, что вышеописанный процесс пристыковки еще одного беспилотного летательного аппарата 200 к корпусу 110 полезной нагрузки и вышеописанный процесс отстыковки беспилотного летательного аппарата 200, ранее пристыкованного к корпусу 110 полезной нагрузки, от указанного корпуса 110 полезной нагрузки, в частности от модуля 130 стыковки, которым снабжен корпус 110 полезной нагрузки, могут быть реализованы или осуществлены под управлением управляющего устройства полезной нагрузки 100 при перемещении полезной нагрузки 100 по воздуху. В некоторых вариантах реализации настоящего изобретения вышеописанный процесс пристыковки еще одного беспилотного летательного аппарата 200 к корпусу 110 полезной нагрузки и вышеописанный процесс отстыковки беспилотного летательного аппарата 200, ранее пристыкованного к корпусу 110 полезной нагрузки, от указанного корпуса 110 полезной нагрузки могут быть реализованы или осуществлены под управлением управляющего устройства полезной нагрузки 100 при нахождении корпуса 110 полезной нагрузки на поверхности земли, на которой полезная нагрузка была размещена по завершению посадки или с которой полезная нагрузка 100 должна быть поднята в воздух при взлете.
Согласно одному из вариантов реализации настоящего изобретения, при продвижении еще одного или другого (второго) беспилотного летательного аппарата 200, пристыкованного к модулю 130 стыковки в дополнение к ранее пристыкованному беспилотному летательному аппарату 200, в сторону указанного ранее пристыкованного беспилотного летательного аппарата 200 под управлением управляющего устройства полезной нагрузки 100 может быть обеспечена возможность остановки указанного другого беспилотного летательного аппарата 200 в его целевом местоположении на корпусе 110 полезной нагрузки, в котором корпус 210, относящийся к указанному другому беспилотному летательному аппарату 200, прилегает или находится вплотную к корпусу 210, относящемуся к указанному ранее пристыкованному беспилотному летательному аппарату 200. Таким образом, в данном варианте реализации настоящего изобретения к модулю 130 стыковки могут быть пристыкованы два беспилотных летательных аппарата 200, расположенных на корпусе 110 полезной нагрузки в своих целевых местоположениях вплотную друг к другу, при этом для перемещения полезной нагрузки 100 по воздуху управляющее устройство полезной нагрузки 100 может управлять работой (например, включать, выключать или изменять рабочие характеристики) по меньшей мере одного или каждого из воздушных движителей 220 в одном из указанных двух пристыкованных беспилотных летательных аппаратов 200, по меньшей мере одного или каждого из воздушных движителей 220 в другом из указанных двух пристыкованных беспилотных летательных аппаратов 200 и/или по меньшей мере одного или каждого из воздушных движителей 120.
Согласно еще одному варианту реализации настоящего изобретения, при продвижении еще одного или другого (второго) беспилотного летательного аппарата 200, пристыкованного к модулю 130 стыковки в дополнение к ранее пристыкованному беспилотному летательному аппарату 200, в сторону указанного ранее пристыкованного беспилотного летательного аппарата 200 под управлением управляющего устройства полезной нагрузки 100 может быть обеспечена возможность остановки этого другого беспилотного летательного аппарата 200 в целевом местоположении на корпусе 110 полезной нагрузки, в котором этот другой беспилотный летательный аппарат 200 находится на расстоянии от указанного ранее пристыкованного беспилотного летательного аппарата 200. Таким образом, в данном варианте реализации настоящего изобретения к модулю 130 стыковки, могут быть пристыкованы два беспилотных летательных аппарата 200, расположенных на корпусе 110 полезной нагрузки в своих целевых местоположениях на расстоянии друг от друга, регулируемом или контролируемом управляющим устройством полезной нагрузки 100, при этом для перемещения полезной нагрузки 100 по воздуху управляющее устройство полезной нагрузки 100 может управлять работой (например, включать, выключать или изменять рабочие характеристики) по меньшей мере одного или каждого из воздушных движителей 220 в одном из указанных двух пристыкованных беспилотных летательных аппаратов 200, по меньшей мере одного или каждого из воздушных движителей 220 в другом из указанных двух пристыкованных беспилотных летательных аппаратов 200 и/или по меньшей мере одного или каждого из воздушных движителей 120.
Согласно другому варианту реализации настоящего изобретения, при продвижении еще одного или другого (второго) беспилотного летательного аппарата 200, пристыкованного к модулю 130 стыковки в дополнение к ранее пристыкованному беспилотному летательному аппарату 200, в сторону указанного ранее пристыкованного беспилотного летательного аппарата 200 под управлением управляющего устройства полезной нагрузки 100 может быть обеспечена возможность воздействия указанного другого беспилотного летательного аппарата 200 на указанный ранее пристыкованный беспилотный летательный аппарат 200 для размещения этого другого беспилотного летательного аппарата 200 в его целевом местоположении на корпусе 110 полезной нагрузки и для продвижения указанного ранее пристыкованного беспилотного летательного аппарата 200 в его новое целевое местоположение на корпусе 110 полезной нагрузки, в котором его корпус 210 находится вплотную к корпусу 210, относящему к указанному другому беспилотному летательному аппарату 200, или в котором указанный ранее пристыкованный беспилотный летательный аппарат 200 находится на корпусе 110 полезной нагрузки на заданном расстоянии от указанного другого беспилотного летательного аппарата 200, регулируемом или контролируемом управляющим устройством полезной нагрузки 100. Таким образом, в данном варианте реализации настоящего изобретения к модулю 130 стыковки могут быть пристыкованы два беспилотных летательных аппарата 200, расположенных на корпусе 110 полезной нагрузки в своих целевых местоположениях вплотную друг к другу, которые они займут в результате их контактного взаимодействия друг с другом, при этом для перемещения полезной нагрузки 100 по воздуху управляющее устройство полезной нагрузки 100 может управлять работой (например, включать, выключать или изменять рабочие характеристики) по меньшей мере одного или каждого из воздушных движителей 220 в одном из указанных двух пристыкованных беспилотных летательных аппаратов 200, по меньшей мере одного или каждого из воздушных движителей 220 в другом из указанных двух пристыкованных беспилотных летательных аппаратов 200 и/или по меньшей мере одного или каждого из воздушных движителей 120.
Согласно иному варианту реализации настоящего изобретения, в дополнение к беспилотному летательному аппарату 200, ранее пристыкованному к модулю 130 стыковки и находящемуся на корпусе 110 полезной нагрузки в своем целевом местоположении, к модулю 130 стыковки могут быть последовательно (через заданные промежутки или периоды времени) пристыкованы два или более беспилотных летательных аппаратов 200. В одной из разновидностей данного варианта реализации настоящего изобретения все беспилотные летательные аппараты 200 (т.е. два или более дополнительно пристыкованных беспилотных летательных аппаратов 200 и ранее пристыкованный беспилотный летательный аппарат 200), пристыкованные к модулю 130 стыковки, могут занимать на корпусе 100 полезной нагрузки свои целевые местоположения, регулируемые или контролируемые управляющим устройством полезной нагрузки 100. В другой разновидности данного варианта реализации настоящего изобретения каждый или по меньшей мере один из одного или более беспилотных летательных аппаратов 200, дополнительно пристыкованных к модулю 130 стыковки, может занимать своей целевое местоположение на корпусе 100 полезной нагрузки, регулируемое или контролируемое управляющим устройством полезной нагрузки 100, а беспилотный летательный аппарат 200, ранее пристыкованный к модулю 130 стыковки, может быть отстыкован от корпуса 110 полезной нагрузки при стыковке с корпусом 110 полезной нагрузки одного или последнего из указанных дополнительных беспилотных летательных аппаратов 200. Еще в одной разновидности данного варианта реализации настоящего изобретения один или более из беспилотных летательных аппаратов 200, дополнительно пристыкованных к модулю 130 стыковки, могут быть последовательно отстыкованы от корпуса 110 полезной нагрузки после отстыковки беспилотного летательного аппарата 200, ранее пристыкованного к модулю 130 стыковки, от корпуса 110 полезной нагрузки.
В одном из вариантов реализации настоящего изобретения по меньшей мере один из стыковочных механизмов 140, которыми может быть снабжен корпус 110 полезной нагрузки, может быть дополнительно выполнен с возможностью входа в разъемное зубчатое взаимодействие с ним прямолинейной зубчатой направляющей 230, которой может быть снабжен еще один (другой или второй) беспилотный летательный аппарат 200, который должен быть пристыкован к модулю 130 стыковки или корпусу 110 полезной нагрузки в дополнение к беспилотному летательному аппарату 200, ранее пристыкованному к корпусу 110 полезной нагрузки и находящемуся в целевом местоположении на корпусе 110 полезной нагрузки, с обеспечением возможности перемещения указанного другого беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки в сторону указанного ранее пристыкованного беспилотного летательного аппарата 200, что обеспечивает (i) возможность размещения указанного другого беспилотного летательного аппарата 200 в своем целевом местоположении на корпусе 110 полезной нагрузки, расположенном на заданном расстоянии от целевого местоположения на корпусе 110 полезной нагрузки, которое занимает указанный ранее пристыкованный беспилотный летательный аппарат, (ii) возможность воздействия указанного другого беспилотного летательного аппарата 200 на указанный ранее пристыкованный беспилотный летательный аппарат 200 для размещения этого другого беспилотного летательного аппарата 200 с своем целевом местоположении на корпусе 110 полезной нагрузки и для продвижения этого ранее пристыкованного беспилотного летательного аппарата 200 в его новое целевое местоположение на корпусе 110 полезной нагрузки, или (iii) возможность воздействия указанного другого беспилотного летательного аппарата 200 на указанный ранее пристыкованный беспилотный летательный аппарат 200 для размещения этого другого беспилотного летательного аппарата 200 с своем целевом местоположении на корпусе 110 полезной нагрузки (например, в целевом местоположении на корпусе 110 полезной нагрузки, соответствующем целевому местоположению ранее пристыкованного беспилотного летательного аппарата 200 на корпусе 110 полезной нагрузки) и для вывода указанного ранее пристыкованного беспилотного летательного аппарата 200 из взаимодействия с указанным по меньшей мере одним стыковочным механизмом 140 с последующей его отстыковкой от корпуса 110 полезной нагрузки.
Следует отметить, что при продвижении беспилотного летательного аппарата 200, ранее пристыкованного к корпусу 110 полезной нагрузки, в результате контактного взаимодействия с еще одним или другим беспилотным летательным аппаратом 200, дополнительно пристыкованным к корпусу 110 полезной нагрузки, в сторону отстыковки от полезной нагрузки 100 каждая из двух прямолинейных зубчатых направляющих 230 в разные моменты (периоды) времени оказывается последовательно введенной в разъемное зубчатое взаимодействие (i) только со средним зубчатым стыковочным механизмом 140, (ii) одновременно со средним и дальним зубчатыми стыковочными механизмами 140 и (iii) только с дальним зубчатым стыковочным механизмом 140, при этом при выходе обеих прямолинейных зубчатых направляющих 230 из зубчатого взаимодействия с соответствующими дальними зубчатыми стыковочными механизмами 140 происходит отстыковка указанного летательного аппарата от корпуса 110 полезной нагрузки. Следует отметить, что управляющее устройство полезной нагрузки 100 выдает управляющие команды на те зубчатые стыковочные механизмы из средних и дальних зубчатых стыковочных механизмов 140, которые должны быть задействованы в разные моменты (периоды) времени для обеспечения возможности перемещения указанного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки до момента отстыковки от корпуса 110 полезной нагрузки. Таким образом, зубчатые стыковочные механизмы из средних и дальних зубчатых стыковочных механизмов 140, приведенные в действие в ответ на соответствующие управляющие команды управляющего устройства полезной нагрузки 100, совершают поворот в заданном направлении и с заданной скоростью поворота с обеспечением возможности ввода зубцов этих приведенных в действие стыковочных механизмов 140 в разъемное зубчатое взаимодействие с соответствующими зубцами 240, выполненными на соответствующих прямолинейных зубчатых направляющих 230, которыми снабжен подлежащий отстыковке (отстыковываемый) беспилотный летательный аппарат 200, что обеспечивает возможность дальнейшего продвижения указанного беспилотного летательного аппарата 200 из своего целевого местоположения на корпусе 110 полезной нагрузки, известного управляющему устройству полезной нагрузки 100, до отстыковки от корпуса 110 полезной нагрузки.
Согласно одному из вариантов реализации настоящего изобретения, перемещение беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки от места стыковки этого беспилотного летательного аппарата 200 с корпусом 110 полезной нагрузки до целевого местоположения на корпусе 110 полезной нагрузки и от целевого местоположения на корпусе 110 полезной нагрузки до места отстыковки этого беспилотного летательного аппарата 200 от корпуса 110 полезной нагрузки может быть реализовано или осуществлено благодаря вводу каждой из двух прямолинейных зубчатых направляющих 230 в разъемное зубчатое взаимодействие только с соответствующим одним из зубчатых стыковочных механизмов 140 в каждый отдельный момент (период) времени перемещения (например, благодаря последовательному вводу каждой из двух прямолинейных зубчатых направляющих 230 только с соответствующим одним из двух ближних зубчатых стыковочных механизмов 140, только с соответствующим одним из двух средних зубчатых стыковочных механизмов 140 и только с соответствующим одним из двух дальних зубчатых стыковочных механизмов 140).
Согласно еще одному варианту реализации настоящего изобретения, перемещение беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки от места стыковки этого беспилотного летательного аппарата 200 с корпусом 110 полезной нагрузки до целевого местоположения на корпусе 110 полезной нагрузки и от целевого местоположения на корпусе 110 полезной нагрузки до места отстыковки этого беспилотного летательного аппарата 200 от корпуса 110 полезной нагрузки может быть реализовано или осуществлено благодаря вводу каждой из двух прямолинейных зубчатых направляющих 230 в разъемное зубчатое взаимодействие только с соответствующим одним или соответствующими двумя из зубчатых стыковочных механизмов 140 в каждый отдельный момент (период) времени перемещения.
Согласно иному варианту реализации настоящего изобретения, при последовательной стыковке двух беспилотных летательных аппаратов 200 с модулем 130 стыковки или корпусом 110 полезной нагрузки с одной из сторон корпуса 110 полезной нагрузки или по существу одновременной стыковке двух беспилотных летательных аппаратов 200 с модулем 130 стыковки или корпусом 110 полезной нагрузки с двух противоположных сторон корпуса 110 полезной нагрузки эти пристыкованные беспилотные летательные аппараты 200 могут быть перемещены по отношению к корпусу 110 полезной нагрузки в их целевые местоположения на корпусе 110 полезной нагрузки, при этом корпус 210 по меньшей мере одного из указанных пристыкованных беспилотных летательных аппаратов 200 может быть выполнен с обеспечением возможности по меньшей мере частичного прохождения через него корпуса другого беспилотного летательного аппарата из указанных пристыкованных беспилотных летательных аппаратов 200. Таким образом, в данном варианте реализации настоящего изобретения корпуса 210 в беспилотных летательных аппаратов 200, пристыкованных к корпусу 110 полезной нагрузки и находящихся в своих целевых местоположениях на корпусе 110 полезной нагрузки, могут по меньшей мере частично перекрывать друг друга или могут быть по меньшей мере частично размещены друг над другом с обеспечением размещения их воздушных движителей 220 на разной высоте или друг над другом. В одной из разновидностей данного варианта реализации настоящего изобретения корпус 210 по меньшей мере в одном или каждом из беспилотных летательных аппаратов 200, пристыкованных к корпусу 110 полезной нагрузки, может быть выполнен расширяемым или раздвижным, при этом расширением или раздвижением указанного корпуса 210 может управлять управляющее устройство полезной нагрузки 100 при перемещении указанного пристыкованного воздушного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки. Таким образом, в данной разновидности этого варианта реализации настоящего изобретения раздвижение корпуса 210 одного из беспилотных летательных аппаратов 200, пристыкованных к корпусу 110 полезной нагрузки, под управлением управляющего устройства полезной нагрузки 100, которое регулирует или контролирует степень раздвижения, позволяет корпусу 210, относящемуся к другому беспилотному летательному аппарату из указанных беспилотных летательных аппаратов 200, проходить через указанный раздвинутый корпус 210 при перемещении указанного другого беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки или позволяет указанному раздвинутому корпусу 210 проходить над корпусом 210, относящимся к указанному другому беспилотному летательному аппарату 200, при перемещении указанного беспилотного летательного аппарата 200 с раздвинутым корпусом 210 по отношению к корпусу 110 полезной нагрузки.
В одном из вариантов реализации настоящего изобретения прямолинейные зубчатые направляющие 230, которыми снабжен корпус 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, могут представлять собой отдельные конструктивные детали, соединенные (разъемно или неразъемно) каждая с указанным корпусом 210, с использованием одного или более соединительных элементов или средств, известных в уровне техники, или скрепленные (разъемно или неразъемно) каждая с указанным корпусом 210 с использованием одного или более крепежных элементов или крепежных средств, известных в уровне техники.
В другом варианте реализации настоящего изобретения корпус 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть снабжен двумя прямолинейными зубчатыми направляющими 230, выполненными за одно целое с корпусом 210 на заданном расстоянии друг от друга, при этом указанные зубчатые направляющие 230 могут быть расположены в целом параллельно друг другу и могут быть снабжены каждая рядом зубцов, в котором зубцы 240 имеют форму и размеры, подходящие для входа в разъемное зубчатое взаимодействие с соответствующими зубцами стыковочных механизмов 140 при стыковке указанного беспилотного летательного аппарата 200 с модулем 130 стыковки или перемещении такого пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки.
Еще в одном варианте реализации настоящего изобретения корпус 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, может быть снабжен только одной прямолинейной зубчатой направляющей 230, в которой зубцы 240 имеют форму и размеры, подходящие для входа в разъемное зубчатое взаимодействие с соответствующими зубцами стыковочных механизмов 140, которыми может быть снабжен корпус 110 полезной нагрузки и которые могут быть установлены в ряд на заданном расстоянии друг от друга (например, на равном расстоянии или разных расстояниях друг от друга), при стыковке указанного беспилотного летательного аппарата 200 с модулем 130 стыковки или перемещении такого пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки. В одной из разновидностей данного варианта реализации настоящего изобретения в каждый момент времени при перемещении беспилотного летательного аппарата 200, состыкованного с модулем 130 стыковки, по отношению к корпусу 110 полезной нагрузки для занятия целевого местоположения (т.е. размещения в целевом месте) на корпусе 110 полезной нагрузки или для отстыковки от корпуса 110 полезной нагрузки одиночная прямолинейная зубчатая направляющая 230 может быть введена, посредством одного или более из своих зубцов 240, в разъемное зубчатое взаимодействие только с одним из стыковочных механизмов 140, которыми может быть снабжен корпус 110 полезной нагрузки. В другой разновидности данного варианта реализации настоящего изобретения в каждый момент времени при перемещении беспилотного летательного аппарата 200, состыкованного с модулем 130 стыковки, по отношению к корпусу 110 полезной нагрузки для занятия целевого местоположения (т.е. размещения в целевом месте) на корпусе 110 полезной нагрузки или для отстыковки от корпуса 110 полезной нагрузки одиночная прямолинейная зубчатая направляющая 230 может быть введена в разъемное зубчатое взаимодействие одновременно с двумя или более из стыковочных механизмов 140 (в частности, с двумя, тремя, четырьмя, пятью, шестью, семью, девятью, десятью или более стыковочными механизмами 140), которыми может быть снабжен корпус 110 полезной нагрузки, с использованием соответственно двух или более групп зубцов указанной зубчатой направляющей 230, каждая из которых по сути соответствует одному из указанных введенных во взаимодействие стыковочных механизмов 140 и каждая из которых содержит один или более последовательно расположенных зубцов из зубцов 240, которыми снабжена указанная зубчатая направляющая 230. Еще в одной разновидности данного варианта реализации настоящего изобретения на разных этапах перемещения летательного аппарата 200, состыкованного с модулем 130 стыковки, по отношению к корпусу 110 полезной нагрузки для занятия целевого местоположения (т.е. размещения в целевом месте) на корпусе 110 полезной нагрузки или для отстыковки от корпуса 110 полезной нагрузки одиночная прямолинейная зубчатая направляющая 230 может быть введена, посредством одного или более из своих зубцов 240, в разъемное зубчатое взаимодействие только с одним из стыковочных механизмов 140, которыми может быть снабжен корпус 110 полезной нагрузки, или может быть введена в разъемное зубчатое взаимодействие одновременно с двумя или более из стыковочных механизмов 140, которыми может быть снабжен корпус 110 полезной нагрузки, с использованием соответственно двух или более групп зубцов, которыми снабжена указанная зубчатая направляющая 230 и каждая из которых соответствует одному из указанных стыковочных механизмов 140. Для специалиста должно быть очевидно, что в вышеописанных разновидностях данного варианта реализации настоящего изобретения в разные моменты времени в течение периода перемещения указанного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки один и тот же стыковочный механизм 140 из числа стыковочных механизмов 140, которыми может быть снабжен корпус 110 полезной нагрузки, оказывается введенным в разъемное зубчатое взаимодействие с разными группами зубцов, которые содержат один или более последовательно расположенных зубцов из зубцов 240, которыми снабжена прямолинейная зубчатая направляющая 230. Кроме того, для специалиста должно быть очевидно, что в вышеописанных разновидностях данного варианта реализации настоящего изобретения при перемещении беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки каждый из стыковочных механизмов 140, которыми может быть снабжен корпус 110 полезной нагрузки, оказывается последовательно введенным в разъемное зубчатое взаимодействие с каждым из зубцов 240, которыми снабжена прямолинейная зубчатая направляющая 230, или только по меньшей мере частью из указанных зубцов 240. Кроме того, для специалиста должно быть очевидно, что в вышеописанных разновидностях данного варианта реализации настоящего изобретения при размещении летательного аппарата 200, состыкованного с модулем 130 стыковки, в целевом месте на корпусе 110 полезной нагрузки зубчатая направляющая 230 может быть введена в разъемное зубчатое взаимодействие с одним или более из стыковочных механизмов 140 (в частности, в зависимости от разновидности данного варианта реализации настоящего изобретения) с использованием соответственно одной или более групп зубцов 240, каждая из которых соответствует одному из указанных стыковочных механизмов 140 и каждая из которых содержит один или более последовательно расположенных зубцов из зубцов 240.
В некоторых вариантах реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен одним или более модулями стыковки (не показаны), каждый из которых может быть доступен с одной из сторон корпуса 110 полезной нагрузки и к каждому из которых в каждый отдельный момент или период времени могут быть пристыкованы один или более беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000.
В иных вариантах реализации настоящего изобретения корпус 110 полезной нагрузки может быть и снабжен каким-либо специальным модулем стыковки, а один или более беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 100, могут быть последовательно пристыкованы непосредственно к корпусу 110 полезной нагрузки с одной из его сторон или могут быть по существу одновременно пристыкованы к корпусу 110 полезной нагрузки с разных его сторон.
В других вариантах реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен одним или более стыковочными механизмами 140, каждый из которых может быть выполнен с возможностью разъемного зубчатого взаимодействия с ним зубчатой направляющей 230, которой снабжен корпус 210 в пристыковываемом беспилотном летательном аппарате 200, входящем в состав воздушной транспортной системы 1000, с обеспечением возможности перемещения указанного беспилотного летательного аппарата 200, при его пристыковке к полезной нагрузке 100, к по отношению к корпусу 110 полезной нагрузки.
Согласно одному из вариантов реализации настоящего изобретения, модуль 130 стыковки, которым снабжен корпус 110 полезной нагрузки, может быть снабжен любым зубчатым стыковочным механизмом 140 или может содержать любой известный в уровне техники зубчатый стыковочный механизм 140, подходящий для ввода в разъемное зубчатое взаимодействие с одним или более или частью из зубцов 240, выполненных на зубчатой направляющей 230, которой снабжен корпус 210 летательного аппарата, при этом разъемное взаимодействие между указанным зубчатым стыковочным механизмом 140 и указанными зубцами 240 обеспечивает возможность формирования разъемного соединения между модулем 130 стыковки и корпусом 210 летательного аппарата и, следовательно, разъемного соединения между полезной нагрузкой 100 и указанным летательным аппаратом 200.
Согласно другому варианту реализации настоящего изобретения, модуль 130 стыковки, которым снабжен корпус 110 полезной нагрузки, может быть выполнен с возможностью его по меньшей мере частичного размещения в корпусе 110 полезной нагрузки. Таким образом, модуль 130 стыковки в данном варианте реализации настоящего изобретения может быть по меньшей мере частично утоплен или углублен в корпус 110 полезной нагрузки.
Согласно еще одному варианту реализации настоящего изобретения, модуль 130 стыковки, которым снабжен корпус 110 полезной нагрузки, может быть установлен в корпусе 110 полезной нагрузки с возможностью выдвижения, раскладывания или развертывания из него под управлением управляющего устройства полезной нагрузки 100, в частности в ответ на управляющие команды управляющего устройства полезной нагрузки 100, управляющие команды летательного аппарата 200, который должен быть разъемно состыкован с корпусом 110 полезной нагрузки, или управляющие команды внешнего управляющего устройства (т.е. внешнего источника управления).
Как показано на фиг. 1, корпус 110 выполнен в виде пассажирской или пользовательской кабины, выполненной с возможностью размещения в ней одного или более людей (например, одного или более пассажиров и/или пилота), при этом в качестве дополнения в указанной кабине могут быть размещены различные живые существа и/или различные грузы любого типа, при этом указанная пользовательская кабина может быть дополнительно снабжена смотровыми окнами и входом в виде входной двери или люка. Следует отметить, что корпус 110 полезной нагрузки, к которому могут быть пристыкованы или присоединены один или более беспилотных летательных аппаратов 200, может быть использован для доставки, перевозки или транспортировки людей, различных живых существ и/или грузов различных типов (твердых, газообразных, жидких, текучих, сыпучих, вязких, радиоактивных, химических, и/или т.п.) по воздуху в целевое место, которое в свою очередь может находиться на поверхности земли (на суше), на поверхности подвижного или неподвижного наземного объекта (например, на наземной платформе, мосту, телевышке, кузове грузовика, крыше здания или т.п.), поверхности неподвижного водного объекта (например, на морской платформе, морском буе, понтоне или т.п.), поверхности подвижного водного объекта (например, на палубе корабля, баржи, теплохода, лайнера, катера или т.п.), поверхности неподвижного или подвижного воздушного объекта (например, на фюзеляже самолета, аэростате, или т.п.) или поверхности любых иных подходящих объектов, известных в уровне техники.
Во внутреннем пространстве корпуса 110 полезной нагрузки может быть установлено кресло, в котором может быть размещен водитель, пользователь или пилот, способный управлять движением или перемещением полезной нагрузки 100 по воздуху с использованием рулевого механизма или руля (т.е. органа управления направлением движения или перемещения), которым снабжен пульт управления, закрепленный или установленный во внутреннем пространстве корпуса 110, при этом функцию пилота может выполнять любой из пользователей или пассажиров, находящихся в указанном внутреннем пространстве корпуса 110. Пульт управления может содержать приборную панель, органы контроля и органы управления, необходимые пилоту для управления перемещением полезной нагрузки 100 по воздуху в целевую область пространства, в том числе для последующей посадки полезной нагрузки 100 для размещения этой полезной нагрузки 100 в месте стоянки, месте хранения, месте восполнения запаса хода, месте ремонта, месте технического обслуживания или т.п.
В одном из вариантов реализации настоящего изобретения во внутреннем пространстве корпуса 110 полезной нагрузки помимо пилота могут быть дополнительно размещены по меньшей мере один пассажир, по меньшей мере один предмет багажа пассажира и/или по меньшей мере один предмет груза, при этом указанные пилот, пассажиры, предметы груза и предметы багажа пассажиров могут быть размещены на соответствующих местах в общем внутреннем пространстве или могут быть размещены каждый в своей отдельной зоне, по меньшей мере частично ограниченной одной или более перегородками, или в отдельном отсеке, по меньшей мере частично ограниченном одной или более перегородками. В одной из разновидностей данного варианта реализации настоящего изобретения кресло может быть размещено в кабине пилота, выполненной во внутреннем пространстве корпуса 110 полезной нагрузки и отделенной перегородкой от остальной части внутреннего пространства корпуса 110, которая в свою очередь может быть разделена другой перегородкой на пассажирский отсек, в котором могут быть установлены одно или более пассажирских кресел для размещения в них пассажиров, и на багажный или грузовой отсек, в котором может быть размещен груз (в частности, один или более предметов груза) и/или размещен пассажирский багаж (в частности, один или более предметов багажа пассажиров), при этом указанные предметы груза, предметы багажа пассажиров и/или пассажирские кресла могут быть размещены или закреплены на дне, полу и/или стенках корпуса 110. В другой разновидности данного варианта реализации настоящего изобретения в пассажирском отсеке в корпусе 110 полезной нагрузки вместо пассажирских кресел или в дополнение к ним могут быть предусмотрены: (i) поручни, установленные на боковых стенках, полу и/или потолке корпуса 110 для размещения пассажиров в любом положении в корпусе 110 полезной нагрузки, например сидя или стоя на полу корпуса 110; (ii) кушетки, кровати или скамейки, закрепленные на полу, стенках и/или потолке корпуса 110 для размещения на них пассажиров в положении сидя, стоя и/или лежа; (iii) специализированные места для размещения инвалидов в положении сидя, стоя и/или лежа; (iv) специализированные места для размещения инвалидных колясок, используемых людьми с инвалидностью; (v) специализированные места для размещения детских колясок, используемых малолетними детьми; (v) специализированные места для размещения детских люлек, используемых младенцами, и (при необходимости) специализированные места для сопровождающих; (vi) специализированные места для размещения медицинских каталок для транспортировки больных, используемых лежачими больными, и/или (vii) специализированные места для размещения спортивного инвентаря. Следует отметить, что количество пассажиров в пассажирском отсеке в корпусе 110 полезной нагрузки может составлять от одного человека до нескольких десятков или даже сотен человек без введения каких-либо ограничений, при этом указанное количество пассажиров по сути ограничено лишь объемом или размером пассажирского отсека в пределах внутреннего пространства корпуса 110. Еще в одной разновидности данного варианта реализации настоящего изобретения в грузовом отсеке корпуса 110 полезной нагрузки может быть предусмотрена не только возможность размещения груза и/или пассажирского багажа на полу корпуса 110, но и возможность их закрепления в грузовом отсеке корпуса 110 с помощью стандартных крепежных средств, известных в уровне технике, при этом в качестве дополнения в грузовом отсеке корпуса 110 могут быть предусмотрены полки, подвесы, ящики и прочие несущие средства, закрепленные на полу, потолке и/или боковых стенках корпуса 110 и позволяющие размещать дополнительные предметы груза и/или предметы багажа пассажиров в грузовом отсеке корпуса 110. В иной разновидности данного варианта реализации настоящего изобретения места для пассажирского багажа, в том числе полки, подвесы, ящики и прочие несущие средства для размещения предметов багажа пассажиров, могут быть предусмотрены только в пассажирском отсеке корпуса 110 полезной нагрузки в дополнение к вышеописанным вариантам средств для размещения пассажиров в указанном пассажирском отсеке. Для специалиста в данной области техники должно быть очевидно, что предметы груза и/или предметы багажа пассажиров могут быть по меньшей мере частично закреплены или зафиксированы и с наружной стороны корпуса 110 с использованием подходящих крепежных средств, известных в уровне техники (например, с помощью специального навесного оборудование закрытого типа, используемого в самолетах, автомобилях, мотоциклах, вертолетах, велосипедах и т.п.). Следует отметить, что вышеописанные кабина пилота, пассажирский отсек и грузовой отсек в корпусе 110 полезной нагрузки могут быть выполнены в целом аналогично соответствующим отсекам самолетов, вертолетов, автобусов, автомобилей, кораблей, катеров или т.п.
Еще в одном варианте реализации настоящего изобретения кресло может быть размещено в кабине пилота во внутреннем пространстве корпуса 110 полезной нагрузки, отделенной перегородкой от остальной части внутреннего пространства корпуса 110, в которой в свою очередь на дне, потолке и/или полу корпуса 110 могут быть размещены или закреплены пассажиры (например, в пассажирских креслах), предметы груза и предметы багажа пассажиров. Кроме того, возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 110 полезной нагрузки могут быть размещены только пилот и пассажиры; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 110 могут быть размещены только пилот и груз; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 110 могут быть размещены только пассажиры и груз; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 110 могут быть размещены только один или более пассажиров, один из которых может выполнять функцию пилота; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 110 может быть размещен только пилот (например, в кресле для пилота), одновременно являющийся и пассажиром полезной нагрузки 100.
Органы управления (не показаны) в корпусе 110 полезной нагрузки, входящие в состав пульта управления, обеспечивают возможность управления полезной нагрузкой 100 в полуавтоматическом режиме (т.е. сочетание осуществления ручного управления пилотом и осуществление автоматического управления бортовыми системами с помощью автопилота, отвечающего по меньшей мере за безопасность движения или перемещения полезной нагрузки 100 по воздуху), так что органы управления пульта управления полезной нагрузки 100 могут быть использованы пилотом, находящимся в кресле и отслеживающим показания приборов на приборной панели пульта управления, для ручного ввода по меньшей мере одной управляющей команды. Следует отметить, что органы управления пульта управления соединены с возможностью обмена данными с управляющим устройством полезной нагрузки 100 с обеспечением возможности выдачи каждой из управляющих команд пилота в указанное управляющее устройство полезной нагрузки 100, при этом некоторые из указанных управляющих команд пилота могут по сути заменять соответствующие управляющие команды управляющего устройства полезной нагрузки 100, генерируемые управляющим устройством полезной нагрузки 100 при движении или перемещении такой полезной нагрузки 100 в автоматическом режиме (т.е. в режиме автопилота) по воздуху в целевую область пространства или целевое место.
В других вариантах реализации настоящего изобретения корпус 110 полезной нагрузки может быть образован из двух или более разъемно состыкованных или соединенных между собой отдельных кабин (например, из двух, трех, четырех, пяти, шести, семи, восьми, девяти, десяти или более отдельных кабин), имеющих один и тот же тип или разные типы.
Следует отметить, что беспилотные летательные аппараты 200, разъемно соединенные или состыкованные с корпусом 110 полезной нагрузки, могут реагировать как единое целое на управляющие команды и/или управляющие инструкции, принимаемые от управляющего устройства полезной нагрузки 100. В частности, работа беспилотных летательных аппаратов 200, разъемно состыкованных с корпусом 110 полезной нагрузки, может быть синхронизирована с помощью управляющего устройства полезной нагрузки 100 (в качестве альтернативы с помощью управляющего устройства по меньшей мере одного или каждого из беспилотных летательных аппаратов 200 и/или управляющего устройства полезной нагрузки 100). Кроме того, по меньшей мере один или каждый из беспилотных летательных аппаратов 200, разъемно соединенных или состыкованных с корпусом 110 полезной нагрузки, может быть электрически соединен с полезной нагрузкой 100 с образованием единой схемы питания и образованием составного источника питания (например, составной источник питания может быть образован из одной или более встроенных аккумуляторных батарей, входящих в состав по меньшей мере одного или каждого из беспилотных летательных аппаратов 200, и/или одной или более встроенных аккумуляторных батарей, установленных в корпусе 110 полезной нагрузки или на нем), при этом процессом зарядки такого составного источника питания и процессом распределения энергии питания между функциональными компонентами беспилотных летательных аппаратов 200, установленными в корпусе 110 полезной нагрузки или на нем, может управлять управляющее устройство полезной нагрузки 100 (в качестве альтернативы управляющее устройство по меньшей мере одного или каждого из беспилотных летательных аппаратов 200 и/или управляющее устройство полезной нагрузки 100).
Следует отметить, что процесс разъемного соединения или разъемной стыковки одного или более беспилотных летательных аппаратов 200 с корпусом 110 полезной нагрузки может происходить прямо в воздухе в ответ на управляющие команды и/или навигационные команды, выдаваемые управляющим устройством полезной нагрузки 100 на указанные беспилотные летательные аппараты 200, то есть может происходить под управлением управляющего устройства полезной нагрузки 100.
Следует также отметить, что в любом из вариантов реализации настоящего изобретения, описанных в данном документе, указание на использование управляющего устройства беспилотного летательного аппарата 200 для управления, контроля или осуществления описанной операции не является ограничительным, т.е. для специалиста должно быть очевидно, что вместо управляющего устройства беспилотного летательного аппарата 200 может быть использовано управляющее устройство полезной нагрузки 100, управляющее устройство другого беспилотного летательного аппарата 200, внешнее управляющее устройство или их любое подходящее сочетание. В частности, при разъемном соединении или разъемной стыковке беспилотного летательного аппарата 200 с корпусом 110 полезной нагрузки управление таким пристыкованным беспилотным летательным аппаратом 200 может перехватывать управляющее устройство полезной нагрузки 100 или управляющее устройство другого беспилотного летательного аппарата 200, уже (ранее) присоединенного или пристыкованного к корпусу 110 полезной нагрузки, или управление таким беспилотным летательным аппаратом 200 может быть осуществлено посредством управляющего устройства этого беспилотного летательного аппарата 200 в ответ на навигационные команды и/или управляющие команды управляющего устройства полезной нагрузки 100.
В одном из вариантов реализации настоящего изобретения корпус 110 полезной нагрузки может содержать (собственный) встроенный источник питания (не показан), выполненный в виде аккумулятора, одной или более аккумуляторных батарей, генератора на основе двигателя внутреннего сгорания, генератора на основе водородного двигателя, генератора на основе одной или более солнечных батарей или генератора на основе любого иного подходящего источника энергии, известного в уровне техники, при этом такой встроенный источник питания может быть также выполнен с возможностью его подзарядки от внешнего источника питания (не показан) с использованием зарядного устройства (не показано) подходящего типа, подключенного к указанному внешнему источнику питания и выполненному с обеспечением возможности подключения к нему указанного встроенного источника питания корпуса 110. В частности, встроенный источник питания в корпусе 110 полезной нагрузки может быть соединен, посредством своей схемы питания, с управляющим устройством полезной нагрузки 100 и любыми иными функциональными компонентами полезной нагрузки 100, описанными в данном документе, с обеспечением возможности подачи на них питания или возможности их питания. В другом варианте реализации настоящего изобретения встроенный источник питания корпуса 110 полезной нагрузки может быть заряжен беспроводным способом с использованием внешнего зарядного устройства (не показано), в основе работы которого лежит принцип электромагнитной индукции, известный специалисту в данной области техники.
В другом варианте реализации настоящего изобретения беспилотный летательный аппарат 200, пристыкованный к модулю 130 стыковки, и функциональные компоненты, установленные в корпусе 110 полезной нагрузки или на нем, могут иметь отдельные схемы питания.
В ином варианте реализации настоящего изобретения схема питания беспилотного летательного аппарата 200, пристыкованного к модулю 130 стыковки, и одна или более схем питания функциональных компонент, установленных в корпусе 110 полезной нагрузки или на нем, могут быть электрически соединены друг с другом с получением объединенной схемы питания и объединенной схемы зарядки.
В некотором ином варианте реализации настоящего изобретения корпус 110 полезной нагрузки может быть дополнительно снабжен ограничителем, выполненным с возможностью ограничения перемещения беспилотного летательного аппарата 200, пристыкованного к модулю 130 стыковки, по отношению к корпусу 110 полезной нагрузки при приведении указанного ограничителя в действие для предотвращения или исключения возможности непреднамеренного выхода зубчатых направляющих беспилотного летательного аппарата 200 из разъемного зубчатого взаимодействия в соответствующими зубчатыми стыковочными механизмами 140, которыми снабжен корпус 110 полезной нагрузки, и, следовательно, непреднамеренной отстыковки указанного беспилотного летательного аппарата 200 от корпуса 110 полезной нагрузки. Следует отметить, что в данном варианте реализации настоящего изобретения ограничитель может быть приведен в действие механическим способом (например, в результате контактного взаимодействия с корпусом 210 беспилотного летательного аппарата или в результате нажатия на него корпуса 210 беспилотного летательного аппарата). Например, в данном варианте реализации настоящего изобретения ограничитель может быть выполнен в виде подпружиненного элемента. В качестве альтернативы в данном варианте реализации настоящего изобретения ограничитель может быть выполнен управляемым, а управляющее устройство полезной нагрузки 100 может быть соединено с возможностью обмена данными с таким управляемым ограничителем с обеспечением возможности приведения его в действие. В одной из разновидностей такого варианта реализации настоящего изобретения ограничитель, которым может быть дополнительно снабжен корпус 110 полезной нагрузки, может быть выполнен с возможностью приведения его в действие при входе по меньшей мере одной из зубчатых направляющих беспилотного летательного аппарата 200 в разъемное зубчатое взаимодействие в соответствующим одним из зубчатых стыковочных механизмов 140, которыми снабжен корпус 110 полезной нагрузки. В другой разновидности данного варианта реализации настоящего изобретения ограничитель, которым может быть дополнительно снабжен корпус 110 полезной нагрузки, может быть выполнен с возможностью приведения его в действие посредством управляющего устройства полезной нагрузки 100 в ответ на показания датчика контакта, который может быть соединен с управляющим устройством полезной нагрузки 100 с возможностью обмена с ним данными и выполнен с возможностью обнаружения или выявления стыковки беспилотного летательного аппарата 200 с корпусом 110 полезной нагрузки. Еще в одной разновидности такого варианта реализации настоящего изобретения ограничитель может быть установлен на корпусе 110 полезной нагрузки, на модуле 130 стыковки или на одной из прямолинейных зубчатых направляющих 230.
Как показано на фиг. 1 и 5-6, воздушные движители 120 установлены на модуле 130 стыковки таким образом, что при стыковке беспилотного летательного аппарата 200 с модулем 130 стыковки, при которой прямолинейные зубчатые направляющие 230 входят в разъемное зубчатое взаимодействие с соответствующими зубчатыми стыковочными механизмами 140, эти воздушные движители 120 проходят через корпус 210 беспилотного летательного аппарата, в частности через внутреннее пространство или внутреннюю полость этого корпуса 210, так что при размещении пристыкованного беспилотного летательного аппарата 200 в его целевом местоположении на корпусе 110 полезной нагрузки каждый из воздушных движителей 120 и воздушных движителей 220 оказывается размещенным с соответствующей одной из сторон корпуса 110 полезной нагрузки. Другими словами, при размещении пристыкованного беспилотного летательного аппарата 200 в его целевом местоположении на корпусе 110 полезной нагрузки воздушные движители 120 и воздушные движители 220 оказываются равномерно распределенными по периметру корпуса 110 полезной нагрузки, при этом воздушные движители 120 установлены на одной паре противоположных сторон корпуса 110 полезной нагрузки, а воздушные движители 220 установлены на другой паре противоположных сторон корпуса 110 полезной нагрузки. Следует отметить, что при прохождении воздушных движителей 120 через корпус 210 беспилотного летательного аппарата они также проходят между воздушных движителей 220.
В одном из вариантов реализации настоящего изобретения при стыковке беспилотного летательного аппарата 200 с модулем 130 стыковки воздушные движители 120 могут проходить под корпусом 210 беспилотного летательного аппарата или корпус 210 беспилотного летательного аппарата может проходить поверх воздушных движителей 120, при этом воздушные движители 220 проходят в пространстве между воздушными движителями 120.
Согласно одному из вариантов реализации настоящего изобретения, по меньшей мере один или каждый из беспилотных летательных аппаратов 200, которые входят в состав воздушной транспортной системы 1000, может быть снабжен одной прямолинейной зубчатой направляющей 240, а модуль 130 стыковки или корпус 110 полезной нагрузки может быть снабжен двумя зубчатыми стыковочными механизмами 140, выполненными с возможностью по существу одновременного или последовательного разъемного зубчатого взаимодействия с прямолинейной зубчатой направляющей 240 при стыковке указанного беспилотного летательного аппарата 200 с модулем 130 стыковки или корпусом 110 полезной нагрузки. В одной из разновидностей данного варианта реализации настоящего изобретения оба зубчатых стыковочных механизма 140 могут быть установлены в ряд на модуле 130 стыковки или корпусе 110 полезной нагрузки с одной из его сторон на заданном расстоянии друг от друга по его ширине или по его длине. В другой разновидности данного варианта реализации настоящего изобретения оба зубчатых стыковочных механизма 140 могут быть установлены в ряд на модуле 130 стыковки или корпусе 110 полезной нагрузки с одной из его сторон с возможностью изменения расстояния между ними на указанной стороне.
Согласно другому варианту реализации настоящего изобретения, модуль 130 стыковки или корпус 110 полезной нагрузки может быть снабжен вертикальной стойкой (не показана), отходящей соответственно от модуля 130 стыковки или корпуса 110 полезной нагрузки с одной из его сторон, а зубчатые стыковочные механизмы 140 могут быть установлены в ряд на указанной вертикальной стойке таким образом, что они расположены на расстоянии друг от друга по протяженности, длине или высоте указанной вертикальной стойки.
Согласно еще одному варианту реализации настоящего изобретения, зубчатые стыковочные механизмы 140 могут быть установлены модуле 130 стыковки или корпусе 110 полезной нагрузки с возможностью входа в зубчатое взаимодействие с соответствующими прямолинейными зубчатыми направляющими 230 беспилотных летательных аппаратов с разных сторон корпуса 110 полезной нагрузки с обеспечением возможности размещения воздушных движителей 220, которыми снабжены указанные беспилотные летательные аппараты 200, в одной плоскости с разных сторон корпуса 110 полезной нагрузки или с заданным угловым смещением по периметру корпуса 110 полезной нагрузки.
Согласно иному варианту реализации настоящего изобретения, корпус 110 полезной нагрузки может быть снабжен двумя воздушными движителями 120, выполненными с противоположных сторон корпуса 110 полезной нагрузки, а зубчатые стыковочные механизмы 140 могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности размещения воздушных движителей 120 и воздушных движителей 220 беспилотного летательного аппарата в одной плоскости с разных сторон корпуса 110 полезной нагрузки или с заданным угловым смещением по периметру корпуса 110 полезной нагрузки при вводе прямолинейной зубчатой направляющей 230 в зубчатое взаимодействие с указанными зубчатыми стыковочными механизмами 140. В одной из разновидностей данного варианта реализации настоящего изобретения зубчатые стыковочные механизмы 140 могут быть установлены на стороне корпуса 110 полезной нагрузки, являющейся смежной с противоположными сторонами корпуса 110 полезной нагрузки, которые снабжены воздушными движителями 120.
Согласно некоторому другому варианту реализации настоящего изобретения, корпус 110 полезной нагрузки может быть снабжен двумя воздушными движителями 120, выполненными с противоположных сторон корпуса 110 полезной нагрузки, а зубчатые стыковочные механизмы 140 могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности ввода прямолинейной зубчатой направляющей 230 беспилотного летательного аппарата в зубчатое взаимодействие с указанными зубчатыми стыковочными механизмами 140 с одной из указанных противоположных сторон корпуса 110 полезной нагрузки или со стороны корпуса 110 полезной нагрузки, являющейся смежной с указанными противоположными сторонами корпуса 110 полезной нагрузки.
В одном из вариантов реализации настоящего изобретения воздушная транспортная система 1000 может содержать (i) полезную нагрузку 100, снабженную двумя или более зубчатыми стыковочными механизмами 140; и (ii) два или более беспилотных летательных аппаратов 200, каждый из которых может быть снабжен прямолинейной зубчатой направляющей 230, выполненной с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одним из указанных зубчатых стыковочных механизмов 140 с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки или самой полезной нагрузке 100 в целом, при этом корпус 210 по меньшей мере одного из указанных беспилотных летательных аппаратов 200 может быть выполнен с обеспечением возможности по меньшей мере частичного прохождения через него корпуса 210 другого беспилотного летательного аппарата из указанных беспилотных летательных аппаратов 200 при перемещении указанного по меньшей мере одного беспилотного летательного аппарата 200 или указанного другого беспилотного летательного аппарата по отношению к корпусу 110 полезной нагрузки или самой полезной нагрузке 100 в целом. В одной из разновидностей данного варианта реализации настоящего изобретения зубчатые стыковочные механизмы 140, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности ввода зубчатых направляющих беспилотных летательных аппаратов 200, которые должны быть пристыкованы к полезной нагрузке 100, в зубчатое взаимодействие с соответствующими зубчатыми стыковочными механизмами полезной нагрузки из указанных стыковочных механизмов 140 с разных сторон корпуса 110 полезной нагрузки. В отдельных вариантах осуществления настоящего изобретения зубчатый стыковочный механизм 140 может быть подпружинен с обеспечением его прижимания к зубчатой направляющей 230. Зубчатая направляющая 230 также может быть подпружинена с обеспечением ее прижимания к зубчатым стыковочным механизмам 140. В другой разновидности данного варианта реализации настоящего изобретения зубчатые стыковочные механизмы 140, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности размещения беспилотных летательных аппаратов 200, которые должны быть пристыкованы к полезной нагрузке 100, на заданном расстоянии по высоте корпуса 110 полезной нагрузки. Еще в одной разновидности данного варианта реализации настоящего изобретения зубчатые стыковочные механизмы 140, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности размещения воздушных движителей 220, относящихся к беспилотным летательным аппаратам 200, которые должны быть пристыкованы к полезной нагрузке 100, в одной плоскости с разных сторон корпуса 110 полезной нагрузки или с заданным угловым смещением по периметру корпуса 110 полезной нагрузки.
В другом варианте реализации настоящего изобретения вышеописанные функциональные элементы полезной нагрузки 100 могут быть установлены на каждом из беспилотных летательных аппаратов 200, входящих в состав воздушной транспортной системы 1000, и наоборот вышеописанные функциональные элементы любого из беспилотных летательных аппаратов 200 могут быть установлены на полезной нагрузке 100. В частности, в таком варианте реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен одной или более прямолинейными зубчатыми направляющими, которые конструктивно и функционально выполнены аналогично вышеописанным прямолинейным зубчатым направляющим 230 и каждая из которых выполнена с возможностью разъемного зубчатого взаимодействия с ней стыковочного механизма беспилотного летательного аппарата, выполненного аналогично вышеописанному зубчатому стыковочному механизму 140, с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки по указанной прямолинейной зубчатой направляющей, при этом по меньшей мере одна из зубчатых направляющих корпуса 110 полезной нагрузки может быть дополнительно выполнена с возможностью разъемного зубчатого взаимодействия с ней зубчатого стыковочного механизма еще одного или другого (второго) беспилотного летательного аппарата 200 с обеспечением возможности воздействия указанного другого беспилотного летательного аппарата 200 на указанный пристыкованный беспилотный летательный аппарат 200 для вывода последнего из взаимодействия с указанной по меньшей мере одной зубчатой направляющей. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере одна из прямолинейных зубчатых направляющих корпуса 110 полезной нагрузки может быть снабжена ограничителем, выполненным с возможностью ограничения перемещения пристыкованного беспилотного летательного аппарата 200 по указанной по меньшей мере одной прямолинейной зубчатой направляющей. В другой разновидности данного варианта реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен ограничителем, выполненным с возможностью ограничения перемещения пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки. Еще в одной разновидности данного варианта реализации настоящего изобретения ограничитель, которым может быть снабжен корпус 110 полезной нагрузки или по меньшей мере одна из прямолинейных зубчатых направляющих корпуса 110 полезной нагрузки, может быть выполнен с возможностью приведения его в действие при входе стыковочного механизма беспилотного летательного аппарата 200 в зубчатое взаимодействие с указанной по меньшей мере одной зубчатой направляющей. В иной разновидности данного варианта реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен двумя или более воздушными движителями 120, при этом по меньшей мере один из таких воздушных движителей 120 может быть выполнен с возможностью выдвижения, раскладывания или развертывания из корпуса 110 полезной нагрузки. В некоторой разновидности данного варианта реализации настоящего изобретения воздушные движители 120, которыми снабжен корпус 110 полезной нагрузки, могут образовывать по меньшей мере одну функциональную пару воздушных движителей, которая работает под управлением управляющего устройства полезной нагрузки 100 и в которой воздушные движители 120 расположены с противоположных сторон корпуса 110 полезной нагрузки. В некоторой другой разновидности данного варианта реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 120, которыми снабжен корпус 110 полезной нагрузки, может быть установлен с одной из сторон корпуса 110 полезной нагрузки с возможностью изменения своего местоположения на указанной стороне корпуса 110 полезной нагрузки. В некоторой иной разновидности данного варианта реализации настоящего изобретения воздушные движители 120, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены с обеспечением возможности прохождения между ними корпуса 210 беспилотного летательного аппарата при вводе зубчатого стыковочного механизма указанного беспилотного летательного аппарата 200 в зубчатое взаимодействие с прямолинейной зубчатой направляющей корпуса 110 полезной нагрузки. В различных разновидностях данного варианта реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен двумя прямолинейными зубчатыми направляющими, выполненными с возможностью разъемного зубчатого взаимодействия с ними стыковочного механизма беспилотного летательного аппарата 200. В различных других разновидностях данного варианта реализации настоящего изобретения прямолинейные зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с одной из его сторон на заданном расстоянии друг от друга. В различных иных разновидностях данного варианта реализации настоящего изобретения зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с одной из его сторон с возможностью изменения расстояния между ними на указанной стороне корпуса 110 полезной нагрузки. В некоторых разновидностях данного варианта реализации настоящего изобретения зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на вертикальной стойке, отходящей от корпуса 110 полезной нагрузки с одной из его сторон, и могут быть расположены на расстоянии друг от друга по протяженности, длине или высоте указанной вертикальной стойки. В некоторых иных разновидностях данного варианта реализации настоящего изобретения зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с возможностью ввода в зубчатое взаимодействие зубчатых стыковочных модулей беспилотных летательных аппаратов 200 с соответствующими прямолинейными зубчатыми направляющими корпуса 110 полезной нагрузки с разных сторон корпуса 110 полезной нагрузки с обеспечением возможности размещения воздушных движителей 220, относящихся к указанным беспилотным летательным аппаратам 200, в одной плоскости с разных сторон корпуса 110 полезной нагрузки или с заданным угловым смещением по периметру корпуса 110 полезной нагрузки. В некоторых других разновидностях данного варианта реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен двумя воздушными движителями 120, выполненными с противоположных сторон корпуса 110 полезной нагрузки, а прямолинейные зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности размещения воздушных движителей 120 и воздушных движителей 220, которыми снабжен корпус 210 в беспилотном летательном аппарате 200, в одной плоскости с разных сторон корпуса 110 полезной нагрузки или с заданным угловым смещением по периметру корпуса 110 полезной нагрузки при вводе зубчатого стыковочного модуля беспилотного летательного аппарата 200 в зубчатое взаимодействие с указанными прямолинейными зубчатыми направляющими. В иных разновидностях данного варианта реализации настоящего изобретения прямолинейные зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на стороне корпуса 110 полезной нагрузки, являющейся смежной с противоположными сторонами корпуса 110 полезной нагрузки, на которых установлены воздушные движители 120. В других разновидностях данного варианта реализации настоящего изобретения корпус 110 полезной нагрузки может быть снабжен двумя воздушными движителями 120, выполненными с противоположных сторон корпуса 110 полезной нагрузки, а прямолинейные зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности ввода зубчатого стыковочного модуля беспилотного летательного аппарата 200 в зубчатое взаимодействие с указанными прямолинейными зубчатыми направляющими корпуса 110 полезной нагрузки с одной из указанных противоположных сторон корпуса 110 полезной нагрузки или со стороны корпуса 110 полезной нагрузки, являющейся смежной с противоположными сторонами корпуса 110 полезной нагрузки, на которых установлены воздушные движители 120.
Согласно иному варианту реализации настоящего изобретения, воздушная транспортная система 1000 может содержать (i) полезную нагрузку 100, снабженную двумя или более прямолинейными зубчатыми направляющими, каждая из которых может быть выполнена аналогично любой из вышеописанных прямолинейных зубчатых направляющих 230, (ii) два или более беспилотных летательных аппаратов 200, каждый из которых снабжен зубчатым стыковочным механизмом, выполненным аналогично вышеописанному зубчатому стыковочному механизму 140 и выполненным с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одной из указанных прямолинейных зубчатых направляющих полезной нагрузки 100 с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата 200 по отношению к корпусу 110 полезной нагрузки по указанной по меньшей мере одной прямолинейной зубчатой направляющей полезной нагрузки 100, при этом корпус 210 по меньшей мере одного из указанных пристыкованных беспилотных летательных аппаратов 200 может быть выполнен с обеспечением возможности по меньшей мере частичного прохождения через него корпуса 210, относящегося к другому беспилотному летательному аппарату из указанных пристыкованных беспилотных летательных аппаратов 200, при перемещении указанного по меньшей мере одного беспилотного летательного аппарата 200 или указанного другого беспилотного летательного аппарата 200 по соответствующей по меньшей мере одной прямолинейной зубчатой направляющей полезной нагрузки 100. В одной из разновидностей данного варианта реализации настоящего изобретения прямолинейные зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности ввода зубчатых стыковочных механизмов беспилотных летательных аппаратов 200 в зубчатое взаимодействие с соответствующими прямолинейными зубчатыми направляющими из указанных прямолинейных зубчатых направляющих полезной нагрузки 100 с разных сторон корпуса 110 полезной нагрузки. В другой разновидности данного варианта реализации настоящего изобретения прямолинейные зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности размещения беспилотных летательных аппаратов 200, пристыкованных к корпусу 110 полезной нагрузки, на заданном расстоянии по высоте корпуса 110 полезной нагрузки или высоте полезной нагрузки 100. В иной разновидности данного варианта реализации настоящего изобретения прямолинейные зубчатые направляющие, которыми снабжен корпус 110 полезной нагрузки, могут быть установлены на корпусе 110 полезной нагрузки с обеспечением возможности размещения воздушных движителей 220, относящихся к беспилотным летательным аппаратам, пристыкованным к корпусу 110 полезной нагрузки, в одной плоскости с разных сторон корпуса 110 полезной нагрузки или с заданным угловым смещением по периметру корпуса 110 полезной нагрузки.
Представленные иллюстративные варианты осуществления настоящего изобретения, примеры и описание служат лишь для обеспечения понимания сущности заявляемого изобретения и не являются ограничивающими. Иные возможные варианты осуществления настоящего изобретения, либо модификации или улучшения вышеописанных вариантов реализации настоящего изобретения будут ясны специалисту в данной области техники из представленного выше описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.
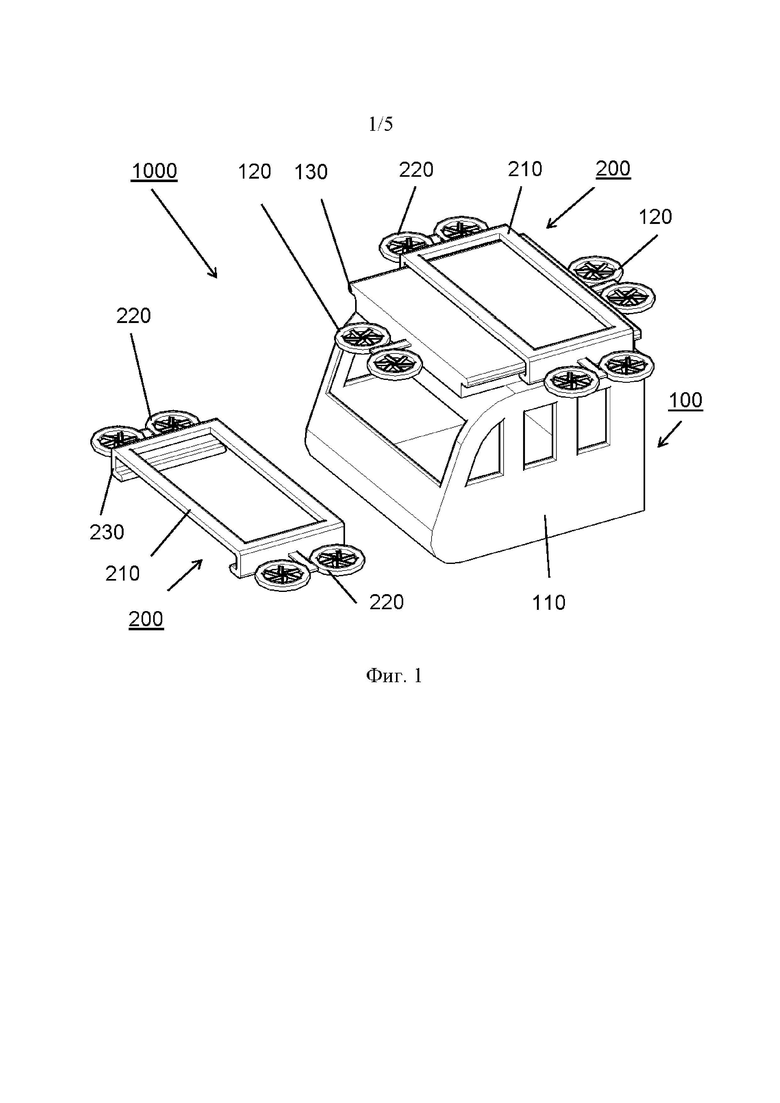
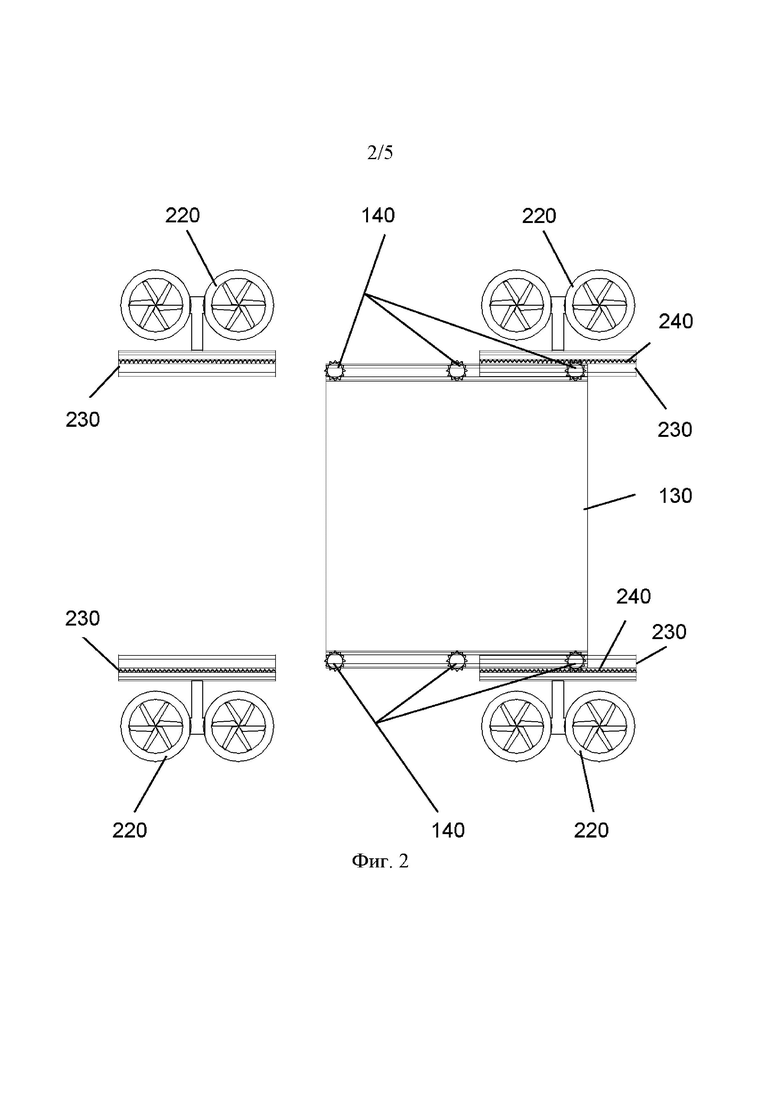
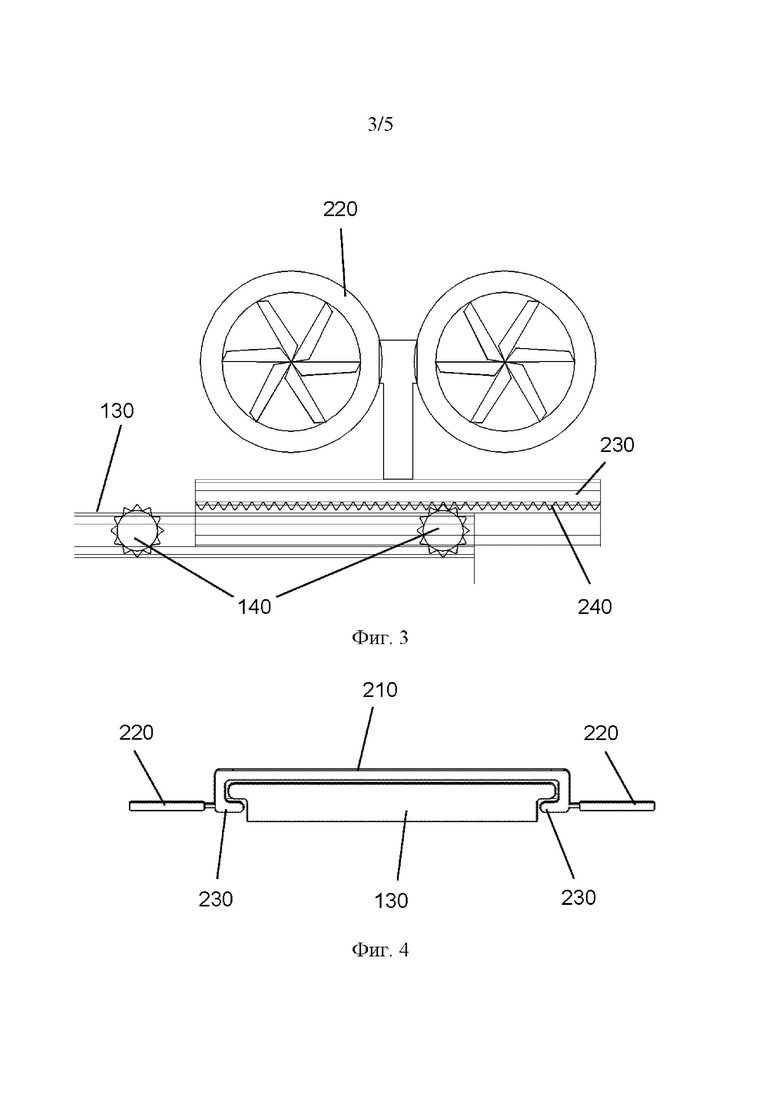
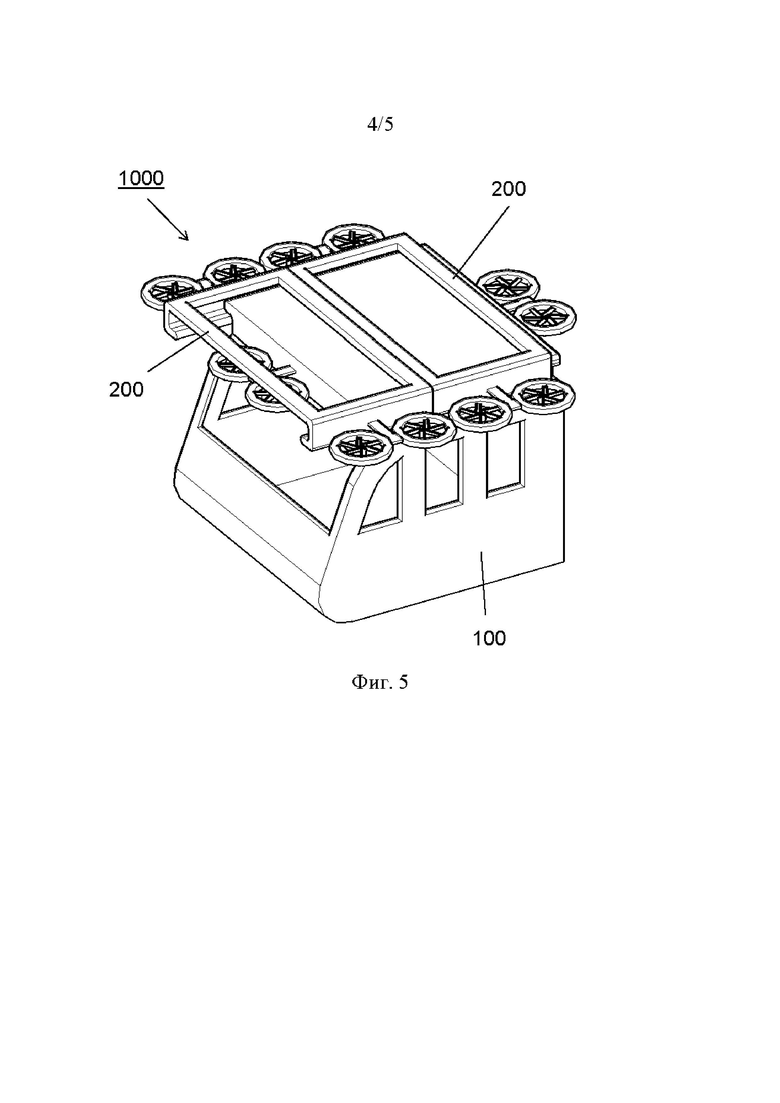
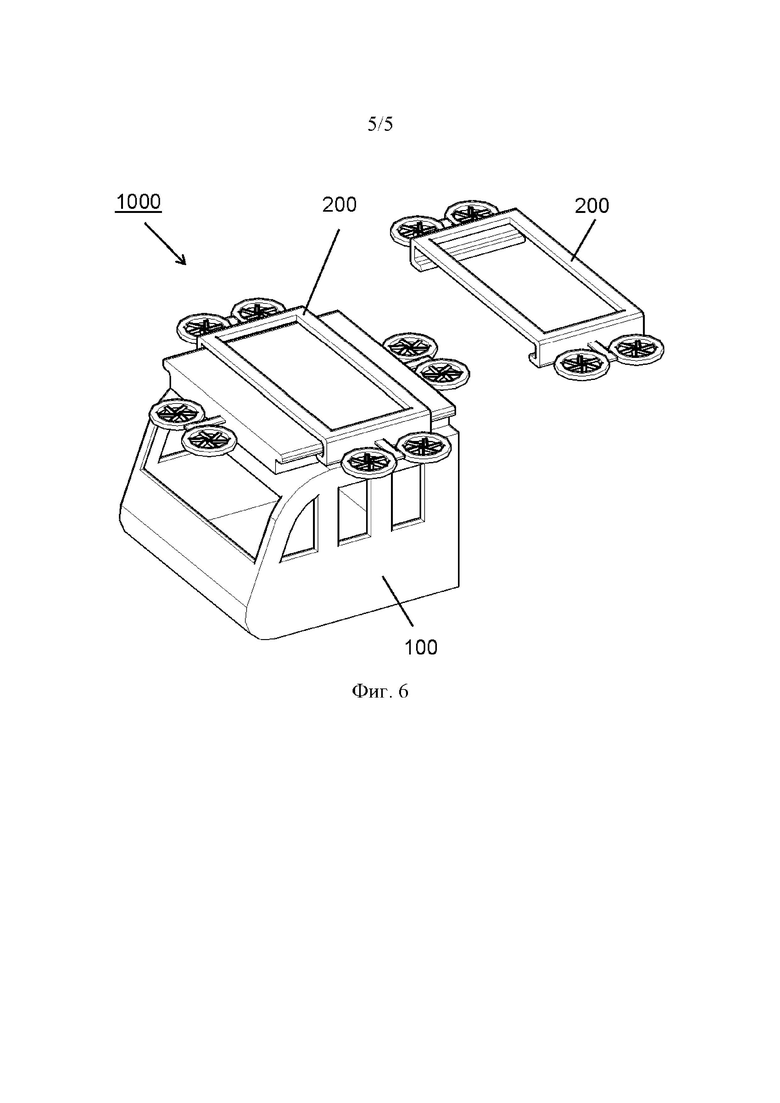
Изобретение относится к вариантам реализации полезной нагрузки, содержащей корпус, снабженный одной или более зубчатыми направляющими или одним или более стыковочными механизмами, каждый из которых выполнен с возможностью разъемного зубчатого взаимодействия со стыкуемым беспилотным летательным аппаратом с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к корпусу полезной нагрузки, при этом корпус полезной нагрузки дополнительно выполнен с возможностью разъемного зубчатого взаимодействия с ним еще одного (другого) беспилотного летательного аппарата с обеспечением возможности контактного воздействия указанного еще одного беспилотного летательного аппарата на указанный пристыкованный беспилотный летательный аппарат для вывода последнего из взаимодействия с корпусом полезной нагрузки. Кроме того, настоящее изобретение относится к вариантам реализации воздушной транспортной системы, в состав каждого из которых входят два или более беспилотных летательных аппаратов и один из вышеописанных вариантов реализации полезной нагрузки. В результате обеспечивается возможность беспосадочного перемещения полезной нагрузки по воздуху в целевое место в течение длительного времени, расширяется арсенал транспортных средств для перемещения грузов/пассажиров по воздуху. 4 н. и 37 з.п. ф-лы, 6 ил.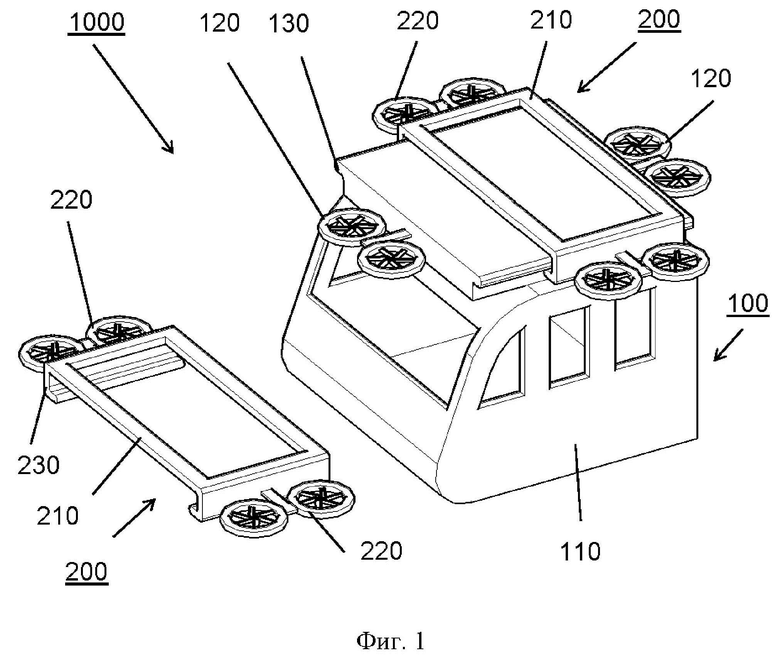
1. Полезная нагрузка, содержащая:
корпус, снабженный одним или более стыковочными механизмами, каждый из которых выполнен с возможностью разъемного зубчатого взаимодействия с ним зубчатой направляющей стыкуемого беспилотного летательного аппарата с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к корпусу, при этом
по меньшей мере один из стыковочных механизмов дополнительно выполнен с возможностью разъемного зубчатого взаимодействия с ним зубчатой направляющей еще одного беспилотного летательного аппарата с обеспечением возможности перемещения еще одного беспилотного летательного аппарата посредством стыковочного механизма полезной нагрузки в сторону указанного пристыкованного беспилотного летательного аппарата и контактного воздействия корпуса указанного еще одного беспилотного летательного аппарата на корпус указанного пристыкованного беспилотного летательного аппарата для вывода последнего из взаимодействия с указанным по меньшей мере одним стыковочным механизмом полезной нагрузки.
2. Полезная нагрузка по п. 1, в которой корпус снабжен ограничителем, выполненным с возможностью ограничения перемещения беспилотного летательного аппарата по отношению к корпусу.
3. Полезная нагрузка по любому из пп. 1, 2, в которой указанный ограничитель выполнен с возможностью приведения его в действие при входе зубчатой направляющей беспилотного летательного аппарата в зубчатое взаимодействие с указанным по меньшей мере одним стыковочным механизмом.
4. Полезная нагрузка по п. 1, в которой корпус снабжен двумя или более воздушными движителями.
5. Полезная нагрузка по п. 4, в которой по меньшей мере один из воздушных движителей корпуса выполнен с возможностью выдвижения, раскладывания или развертывания из корпуса.
6. Полезная нагрузка по п. 4, в которой воздушные движители корпуса образуют по меньшей мере одну функциональную пару воздушных движителей, в которой воздушные движители расположены с противоположных сторон корпуса.
7. Полезная нагрузка по п. 4, в которой по меньшей мере один из воздушных движителей корпуса установлен с одной из сторон корпуса с возможностью изменения своего местоположения на указанной стороне корпуса.
8. Полезная нагрузка по п. 4, в которой воздушные движители корпуса установлены с обеспечением возможности их прохождения через тело беспилотного летательного аппарата или возможности прохождения корпуса беспилотного летательного аппарата поверх указанных воздушных движителей при вводе зубчатой направляющей указанного беспилотного летательного аппарата в зубчатое взаимодействие с указанным по меньшей мере одним стыковочным механизмом.
9. Полезная нагрузка по п. 1, в которой корпус снабжен двумя стыковочными механизмами, выполненными с возможностью разъемного зубчатого взаимодействия с зубчатой направляющей беспилотного летательного аппарата.
10. Полезная нагрузка по п. 9, в которой указанные стыковочные механизмы установлены на корпусе с одной из его сторон на заданном расстоянии друг от друга.
11. Полезная нагрузка по п. 9, в которой указанные стыковочные механизмы установлены на корпусе с одной из его сторон с возможностью изменения расстояния между ними на указанной стороне корпуса.
12. Полезная нагрузка по п. 1, в которой указанные стыковочные механизмы установлены на вертикальной стойке, отходящей от корпуса с одной из его сторон, и расположены на расстоянии друг от друга по длине вертикальной стойки.
13. Полезная нагрузка по п. 1, в которой указанные стыковочные механизмы установлены на корпусе с возможностью входа в зубчатое взаимодействие с зубчатыми направляющими беспилотных летательных аппаратов с разных сторон корпуса с обеспечением возможности размещения воздушных движителей указанных беспилотных летательных аппаратов в одной плоскости с разных сторон корпуса или с заданным угловым смещением по периметру корпуса.
14. Полезная нагрузка по п. 1, в которой корпус снабжен двумя воздушными движителями, выполненными с противоположных сторон корпуса, а указанные стыковочные механизмы установлены на корпусе с обеспечением возможности размещения воздушных движителей корпуса и воздушных движителей беспилотного летательного аппарата в одной плоскости с разных сторон корпуса или с заданным угловым смещением по периметру корпуса при вводе зубчатой направляющей беспилотного летательного аппарата в зубчатое взаимодействие с указанными стыковочными механизмами.
15. Полезная нагрузка по п. 14, в которой указанные стыковочные механизмы установлены на стороне корпуса, являющейся смежной с указанными противоположными сторонами корпуса.
16. Полезная нагрузка по п. 1, в которой корпус снабжен двумя воздушными движителями, выполненными с противоположных сторон корпуса, а указанные стыковочные механизмы установлены на корпусе с обеспечением возможности ввода зубчатой направляющей беспилотного летательного аппарата в зубчатое взаимодействие с указанными стыковочными механизмами с одной из указанных противоположных сторон корпуса или со стороны корпуса, являющейся смежной с указанными противоположными сторонами корпуса.
17. Воздушная транспортная система, содержащая:
полезную нагрузку, снабженную двумя или более стыковочными механизмами,
два или более беспилотных летательных аппаратов, каждый из которых снабжен зубчатой направляющей, выполненной с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одним из указанных стыковочных механизмов полезной нагрузки с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к полезной нагрузке, при этом
корпус по меньшей мере одного из указанных беспилотных летательных аппаратов выполнен с обеспечением возможности по меньшей мере частичного прохождения через него корпуса другого беспилотного летательного аппарата из указанных беспилотных летательных аппаратов при перемещении указанного по меньшей мере одного беспилотного летательного аппарата или указанного другого беспилотного летательного аппарата по отношению к полезной нагрузке.
18. Воздушная транспортная система по п. 17, в которой указанные стыковочные механизмы установлены на полезной нагрузке с обеспечением возможности ввода зубчатых направляющих указанных беспилотных летательных аппаратов в зубчатое взаимодействие с соответствующими стыковочными механизмами из указанных стыковочных механизмов полезной нагрузки с разных сторон корпуса полезной нагрузки.
19. Воздушная транспортная система по п. 17, в которой указанные стыковочные механизмы установлены на полезной нагрузке с обеспечением возможности размещения указанных беспилотных летательных аппаратов на заданном расстоянии по высоте полезной нагрузки.
20. Воздушная транспортная система по п. 17, в которой указанные стыковочные механизмы установлены на полезной нагрузке с обеспечением возможности размещения воздушных движителей указанных беспилотных летательных аппаратов в одной плоскости с разных сторон полезной нагрузки или с заданным угловым смещением по периметру полезной нагрузки.
21. Полезная нагрузка, содержащая:
корпус, снабженный одной или более зубчатыми направляющими, каждая из которых выполнена с возможностью разъемного зубчатого взаимодействия с ней стыковочного механизма беспилотного летательного аппарата с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к корпусу по указанной зубчатой направляющей, при этом
по меньшей мере одна из зубчатых направляющих корпуса дополнительно выполнена с возможностью разъемного зубчатого взаимодействия с ней стыковочного механизма еще одного беспилотного летательного аппарата с обеспечением возможности перемещения еще одного беспилотного летательного аппарата по зубчатой направляющей в сторону указанного пристыкованного беспилотного летательного аппарата и контактного воздействия корпуса указанного еще одного беспилотного летательного аппарата на корпус указанного пристыкованного беспилотного летательного аппарата для вывода последнего из взаимодействия с указанной по меньшей мере одной зубчатой направляющей полезной нагрузки.
22. Полезная нагрузка по п. 21, в которой по меньшей мере одна из зубчатых направляющих корпуса снабжена ограничителем, выполненным с возможностью ограничения перемещения беспилотного летательного аппарата по указанной по меньшей мере одной зубчатой направляющей.
23. Полезная нагрузка по п. 21, в которой корпус снабжен ограничителем, выполненным с возможностью ограничения перемещения беспилотного летательного аппарата по отношению к корпусу.
24. Полезная нагрузка по любому из пп. 22, 23, в которой указанный ограничитель выполнен с возможностью приведения в действие при входе стыковочного механизма беспилотного летательного аппарата в зубчатое взаимодействие с указанной по меньшей мере одной зубчатой направляющей.
25. Полезная нагрузка по п. 21, в которой корпус снабжен двумя или более воздушными движителями.
26. Полезная нагрузка по п. 25, в которой по меньшей мере один из воздушных движителей корпуса выполнен с возможностью выдвижения, раскладывания или развертывания из корпуса.
27. Полезная нагрузка по п. 25, в которой воздушные движители корпуса образуют по меньшей мере одну функциональную пару воздушных движителей, в которой воздушные движители расположены с противоположных сторон корпуса.
28. Полезная нагрузка по п. 25, в которой по меньшей мере один из воздушных движителей корпуса установлен с одной из сторон корпуса с возможностью изменения своего местоположения на указанной стороне корпуса.
29. Полезная нагрузка по п. 25, в которой воздушные движители корпуса установлены с обеспечением возможности прохождения между ними корпуса беспилотного летательного аппарата при вводе стыковочного механизма указанного беспилотного летательного аппарата в зубчатое взаимодействие с зубчатой направляющей корпуса.
30. Полезная нагрузка по п. 21, в которой корпус снабжен двумя зубчатыми направляющими, выполненными с возможностью разъемного зубчатого взаимодействия с ними стыковочного механизма беспилотного летательного аппарата.
31. Полезная нагрузка по п. 30, в которой указанные зубчатые направляющие установлены на корпусе с одной из его сторон на заданном расстоянии друг от друга.
32. Полезная нагрузка по п. 30, в которой указанные зубчатые направляющие установлены на корпусе с одной из его сторон с возможностью изменения расстояния между ними на указанной стороне корпуса.
33. Полезная нагрузка по п. 21, в которой указанные зубчатые направляющие установлены на вертикальной стойке, отходящей от корпуса с одной из его сторон, и расположены на расстоянии друг от друга по высоте вертикальной стойки.
34. Полезная нагрузка по п. 21, в которой указанные зубчатые направляющие установлены на корпусе с возможностью ввода в зубчатое взаимодействие стыковочных модулей беспилотных летательных аппаратов с соответствующими зубчатыми направляющими с разных сторон корпуса с обеспечением возможности размещения воздушных движителей указанных беспилотных летательных аппаратов в одной плоскости с разных сторон корпуса или с заданным угловым смещением по периметру корпуса.
35. Полезная нагрузка по п. 21, в которой корпус снабжен двумя воздушными движителями, выполненными с противоположных сторон корпуса, а указанные зубчатые направляющие установлены на корпусе с обеспечением возможности размещения воздушных движителей корпуса и воздушных движителей беспилотного летательного аппарата в одной плоскости с разных сторон корпуса или с заданным угловым смещением по периметру корпуса при вводе стыковочного модуля беспилотного летательного аппарата в зубчатое взаимодействие с указанными зубчатыми направляющими.
36. Полезная нагрузка по п. 35, в которой указанные зубчатые направляющие установлены на стороне корпуса, являющейся смежной с указанными противоположными сторонами корпуса.
37. Полезная нагрузка по п. 21, в которой корпус снабжен двумя воздушными движителями, выполненными с противоположных сторон корпуса, а указанные зубчатые направляющие установлены на корпусе с обеспечением возможности ввода стыковочного модуля беспилотного летательного аппарата в зубчатое взаимодействие с указанными зубчатыми направляющими с одной из указанных противоположных сторон корпуса или со стороны корпуса, являющейся смежной с указанными противоположными сторонами корпуса.
38. Воздушная транспортная система, содержащая:
полезную нагрузку, снабженную двумя или более зубчатыми направляющими,
два или более беспилотных летательных аппаратов, каждый из которых снабжен стыковочным механизмом, выполненным с возможностью входа в разъемное зубчатое взаимодействие по меньшей мере с одной из указанных зубчатых направляющих полезной нагрузки с обеспечением возможности перемещения указанного пристыкованного беспилотного летательного аппарата по отношению к полезной нагрузке по указанной по меньшей мере одной зубчатой направляющей, при этом
корпус по меньшей мере одного из указанных беспилотных летательных аппаратов выполнен с обеспечением возможности по меньшей мере частичного прохождения через него корпуса другого беспилотного летательного аппарата из указанных беспилотных летательных аппаратов при перемещении указанного по меньшей мере одного беспилотного летательного аппарата или указанного другого беспилотного летательного аппарата по соответствующей по меньшей мере одной зубчатой направляющей полезной нагрузки.
39. Воздушная транспортная система по п. 38, в которой указанные зубчатые направляющие установлены на полезной нагрузке с обеспечением возможности ввода стыковочных механизмов указанных беспилотных летательных аппаратов в зубчатое взаимодействие с соответствующими зубчатыми направляющими из указанных зубчатых направляющих полезной нагрузки с разных сторон корпуса полезной нагрузки.
40. Воздушная транспортная система по п. 38, в которой указанные зубчатые направляющие установлены на полезной нагрузке с обеспечением возможности размещения указанных беспилотных летательных аппаратов на заданном расстоянии по высоте полезной нагрузки.
41. Воздушная транспортная система по п. 38, в которой указанные зубчатые направляющие установлены на полезной нагрузке с обеспечением возможности размещения воздушных движителей указанных беспилотных летательных аппаратов в одной плоскости с разных сторон полезной нагрузки или с заданным угловым смещением по периметру полезной нагрузки.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ), САМОХОДНЫЙ МОДУЛЬ, ПОЛЕЗНАЯ НАГРУЗКА, СИСТЕМА И СПОСОБ ДЛЯ ПЕРЕМЕЩЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ (ВАРИАНТЫ) | 2022 |
|
RU2798089C1 |
| Электромагнитный прерыватель | 1924 |
|
SU2023A1 |
| US 10860115 B1, 08.12.2020 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| ВСПОМОГАТЕЛЬНЫЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ПЛАВАТЕЛЬНОГО СРЕДСТВА | 2012 |
|
RU2516892C2 |
| US 10549850 B1, 04.02.2020 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО, ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2789564C1 |
| ШАХТНАЯ НАПОЧВЕННАЯ ДОРОГА С ЗУБЧАТЫМ ПРИВОДОМ | 2003 |
|
RU2323842C2 |

