Изобретение относится к области наземной навигации и может быть использовано в автономных системах наземной навигации, в которых требуется определение с высокой точностью скорости движения и пройденного расстояния наземным транспортным средством (НТС). Для этого используется комплексирование нескольких измерителей параметров движения.
Комплексные навигационные системы (КНС) вследствие имеющейся в них избыточной информации, наличия соответствующих корректирующих цепей и автоматической обработки навигационной информации позволяют получить более точные результаты измерений параметров навигации, чем любой отдельный измеритель [1].
В качестве дополнительных измерителей могут использоваться измерители, основанные на различных физических принципах определения параметров движения НТС.
Известно множество реализаций КНС для наземных транспортных средств, в которых для определения скорости используются измерители, основанные на различных физических принципах: механический датчик скорости/пути (МДС/МДП) [2, 3], доплеровский датчики скорости [3], измерители скорости на основе акселерометров [4], корреляционно-экстремальные измерители скорости [5] и др. Каждый из датчиков имеет свои достоинства и недостатки [2].
Известен «Способ определения скорости движения наземного транспортного средства», где для повышения точности определения скорости НТС используется совместная работа механического и оптоэлектронного датчиков скорости (ОЭДС) [6].
В данном способе определения скорости движения объекта в качестве в качестве основного измерителя используется МДС, работающего непрерывно, а в качестве дополнительного - более точный оптоэлектронный датчик скорости (ОЭДС), работающий в определенные интервалы времени.
Принцип работы ОЭДС основан на измерении времени задержки т появления электрических сигналов (импульсов) на выходах первого и второго каналов ОЭДС, на входы которых (оптоэлектронные матрицы) поступают отраженные от дорожного покрытия, освещаемого минипрожекторами ОЭДС, световые потоки Ф(t) и Ф(t+τ).
Оптоэлектронные матрицы установлены на НТС и разнесены на его шасси на строго определенное расстояние  друг относительно друга в продольном направлении по ходу движения НТС. Тогда скорость V движения НТС может быть определена ОЭДС в соответствии с формулой:
друг относительно друга в продольном направлении по ходу движения НТС. Тогда скорость V движения НТС может быть определена ОЭДС в соответствии с формулой:

Основное отличие принципа действия ОЭДС от других близких по принципам измерения скорости датчиков, например, от корреляционно-экстремальных измерителей скорости заключается в том, что оценивается не вся совокупность сигналов на выходах обоих каналов ОЭДС, а лишь отдельные, характерные импульсы, имеющие достаточно большие амплитуды отраженных сигналов.
В данном способе осуществляют непрерывное измерение скорости объекта основным (МДС) и периодическое измерение скорости с высокой точностью дополнительным измерителем (ОЭДС) при этом используют измерение времени задержки сигнала второго канала относительно первого высокоточным измерителем в определенных границах временных интервалов, предварительно определяемых менее точным измерителем скорости.
Наиболее близким по технической сущности (прототипом) является «Способ автономного определения скорости движения наземного транспортного средства»[7].
В данном способе при использовании двух измерителей скорости основного и дополнительного осуществляют непрерывное измерение скорости движения объекта основным (МДС) и периодические измерения с высокой точностью дополнительным измерителем (ОЭДС) и при этом используют измерение времени задержки сигнала второго канала относительно первого высокоточным измерителем в определенных границах временных интервалов, предварительно определяемых менее точным измерителем скорости, причем периодичность измерений высокоточным измерителем определяют на основе сравнения уровней сигналов второго канала высокоточного измерителя относительно первого канала и при их расхождении, превышающем пороговый уровень, отключают более высокоточный измеритель.
Однако в реальных условиях функционирования транспортного средства (наличие на дорожном покрытии воды, льда, свежего снега, воды со льдом и т.п., разность в естественной освещенности участка дорожной поверхности под первым и вторым чувствительным элементом ОЭДС, а также запыленности между ОЭДС и дорожным покрытием) только сравнения уровней сигналов второго канала высокоточного измерителя относительно первого канала и при их расхождении, превышающем пороговый уровень, отключения более высокоточного измерителя недостаточно для достоверного определении скорости движения НТС.
Целью настоящего изобретения является повышение точности и достоверности измерения скорости движения наземного транспортного средства.
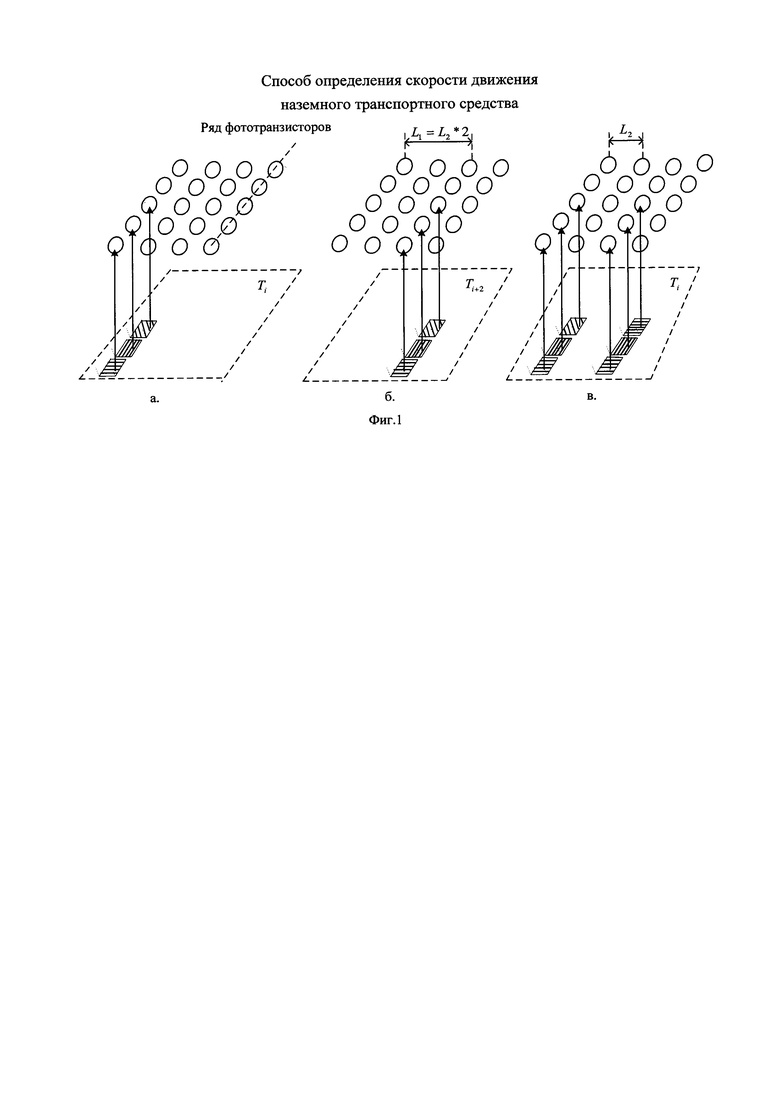
В предлагаемом способе определения скорости движения НТС чувствительные элементы ОЭДС представляет собой прямоугольное поле (фиг. 1а), состоящее из нескольких рядов оптоэлектронных элементов (например, фототранзисторов).
В отличие от ближайшего аналога (прототипа) в предлагаемом способе одним каналом ОЭДС является один ряд оптоэлектронных чувствительных элементов. Количество каналов ОЭДС соответствует количеству рядов оптоэлектронных чувствительных элементов.
Так на фиг. 1a в качестве примера, представлена матрица ОЭДС содержащая 4 ряда по 5 оптоэлектронных чувствительных элементов в каждом. Таким образом, на выходе каждого канала ОЭДС в данный момент времени присутствует сигнал, содержащий информацию не об одной неоднородности, а об области неоднородностей, за счет чего повышается достоверность определения момента времени прохождения НТС над одной и той же неоднородностью разными каналами ОЭДС по сравнению с прототипом.
Так, например, область неоднородности третьим каналом определяется с учетом возможных флуктуаций сигнала на выходе оптоэлектронных чувствительных элементов первого и третьего каналов, связанных с изменением светопроницаемости воздушной среды (туман, водяная взвесь, пыль и т.п.) во время движения НТС и собственными шумами оптоэлектронных чувствительных элементов. В основе данного способа лежит принцип сохранения пропорциональности отношения значения сигналов на выходе всех пар одноименных оптоэлектронных чувствительных элементов первого и третьего ряда (фиг. 1б).
В случае отличия значений сигналов на выходе используемых оптоэлектронных чувствительных элементов первого и третьего ряда, но сохранения пропорциональности отношения значения сигналов на выходе всех пар используемых оптоэлектронных чувствительных элементов, считается, что под третьим рядом оптоэлектронных чувствительных элементов в момент времени Ti+2, находится та же область неоднородностей, что в момент времени Ti находилась под первым рядом оптоэлектронных чувствительных элементов.
В случае отсутствия пропорциональности отношения значения сигналов на выходе всех пар используемых оптоэлектронных чувствительных элементов, считается, что условия работы ОЭДС неблагоприятные. Для повышения надежности работы ОЭДС в неблагоприятных условиях, используется информационная избыточность, введенная в ОЭДС. Так измерения начинают проводиться одновременно по двум разным неоднородностям, между двумя парами рядов оптоэлектронных чувствительных элементов соответственно 1 и 2, 3 и 4 (фиг. 1в)
После определения области неоднородности вторым каналом, отстоящим от первого на базу L2, определяется скорость движения НТС.
В процессе определения скорости движения НТС, проводится контроль точности измерений в каждой паре каналов ОЭДС.
Способ контроля точности на примере первого и второго каналов ОЭДС, выглядит следующим образом. В результате произведенных п измерений в каждой серии измерений за короткий отрезок времени, в течение которого скорость движения НТС меняется незначительно (отрезок времени в несколько мс), определяется среднее значение скорости, а также среднеквадратические значения разбросов текущих значений скорости от их средних значений. При разности полученных среднеквадратических значений сигналов на выходах первого и второго каналов ОЭДС, превышающих пороговое значение происходит отбраковка рассчитанного значения средней скорости движения НТС для данной пары каналов.
При условии положительного контроля точности по всем парам каналов ОЭДС среднее значение скорости ОЭДС, определяется как среднее арифметическое средних значений скоростей всех пар каналов ОЭДС, таким образом, повышая итоговую точность определения скорости НТС.
В случае отрицательного результата контроля точности по одной паре каналов из трех возможных пар, среднее значение скорости пары каналов с отрицательным результатом контроля точности отбраковывается.
В случае отрицательного результата контроля точности по двум парам каналов из трех возможных или по всем парам каналов, результаты измерения скорости НТС отбраковываются и для подкалибровки МДС используются следующие значения измерений, полученных с помощью ОЭДС.
Таким образом, в предлагаемом способе по сравнению с прототипом высокоточный измеритель дополнен еще двумя измерительными каналами, причем каждый канал представляет собой ряд нескольких оптоэлектронных чувствительных элементов, идентифицирующих области неоднородностей; в случае идентификации одной и той же области неоднородностей одновременно двумя, тремя или всеми каналами при наличии пропорциональности отношения значения сигналов всех пар одноименных оптоэлектронных чувствительных элементов соответствующих измерительных каналов, уточняется с разной степенью точности масштабный коэффициент основного измерителя, а в случае идентификации неоднородности только одним каналом высокоточный измеритель переходит в режим одновременной идентификации двух разных областей неоднородностей, находящихся в поле зрения измерительных каналов высокоточного измерителя, после успешной идентификации одной или одновременно двух, из которых также уточняется масштабный коэффициент основного измерителя, в случае же идентификации только одной неоднородности только одним каналом, либо снижения точности определения масштабного коэффициента основного измерителя ниже заданного уровня, корректировка масштабного коэффициента основного датчика временно блокируется и возобновляется через установленный интервал времени.
Сравнительный анализ существенных признаков существующих способов определения параметров навигации наземных транспортных средств и настоящего способа показывает, что предложенный способ, основанный на использовании дополнительных операций, связанных с контролем результатов измерений, полученных ОЭДС, и надежности функционирования НС, отличается тем, что за счет обработки полученной информации и уменьшения вероятности неточной подкалибровки МДС обеспечивается более надежное и точное определение скорости движения НТС.
Таким образом, предложенный способ имеет новизну. Авторам не известна совокупность существенных признаков, применяемых для решения данной технической задачи, что соответствует критерию «изобретательский уровень».
Источники информации
1. Помыкаев И.И., Селезнев В.П., Дмитриченко А.А. Навигационные приборы и системы: Учебное пособие для ВУЗов, М.: «Машиностроение», 1983. - 456 с.
2. Попов А.П. Теория навигации. Ч. 1. Тексты лекций. М.: МО СССР, 1982. - 196 с.
3. Патент RU 2193755, 2002.
4. Андреев В.Д. Теория инерциальной навигации. Автономные системы. М.: «Наука», 1966. - 600 с.
5. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. М.: Сов. радио, 1974. - 392 с.
6. Патент RU 2431847, 2010.
7. Патент RU 2552757, 2015.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения скорости наземного транспортного средства | 2019 |
|
RU2711539C1 |
| Способ определения скорости движения наземного транспорта | 2022 |
|
RU2805016C1 |
| Способ измерения скорости движения наземного транспортного средства | 2022 |
|
RU2787685C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2552757C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТОМ | 2015 |
|
RU2584794C1 |
| Устройство для автономного определения расстояния, пройденного наземным транспортным средством | 2021 |
|
RU2768547C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2549607C1 |
| Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства | 2019 |
|
RU2723892C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2431847C1 |
Изобретение относится к области наземной навигации и может быть использовано в автономных системах наземной навигации, в которых требуется определение с высокой точностью скорости движения и пройденного расстояния наземным транспортным средством (НТС). Заявленный способ определения скорости движения наземного транспортного средства заключается в непрерывном измерении скорости движения объекта основным и периодическим измерением с высокой точностью дополнительным измерителем. При этом используют измерение времени задержки сигнала второго канала относительно первого высокоточным измерителем в определенных границах временных интервалов. Периодичность измерений высокоточным измерителем определяют на основе сравнения уровней сигналов второго канала высокоточного измерителя относительно первого канала, а при их расхождении, превышающем пороговый уровень, отключают более высокоточный измеритель, состоящий из нескольких измерительных каналов оптоэлектронных чувствительных элементов, которые идентифицируют области неоднородностей дорожного покрытия. Технический результат - повышение точности и достоверности измерения скорости движения наземного транспортного средства. 1 ил.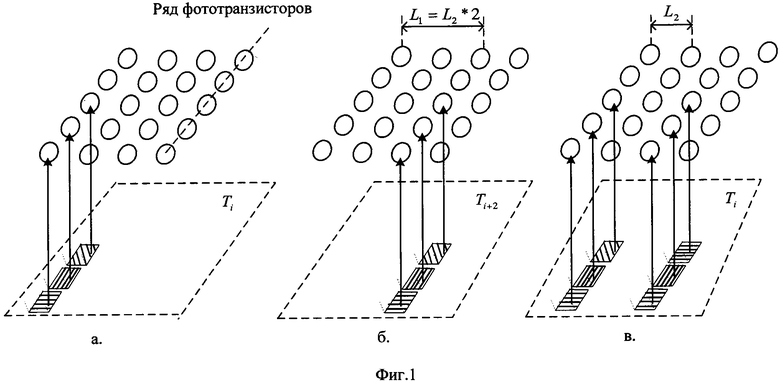
Способ определения скорости движения наземного транспортного средства, заключающийся в том, что при использовании двух измерителей скорости - основного и дополнительного - осуществляют непрерывное измерение скорости движения объекта основным и периодические измерения с высокой точностью дополнительным измерителем и при этом используют измерение времени задержки сигнала второго канала относительно первого высокоточным измерителем в определенных границах временных интервалов, предварительно определяемых менее точным измерителем скорости, причем периодичность измерений высокоточным измерителем определяют на основе сравнения уровней сигналов второго канала высокоточного измерителя относительно первого канала и при их расхождении, превышающем пороговый уровень, отключают более высокоточный измеритель, отличающийся тем, что высокоточный измеритель состоит из нескольких измерительных каналов оптоэлектронных чувствительных элементов, которые идентифицируют области неоднородностей дорожного покрытия; в случае идентификации одной и той же области неоднородностей одновременно двумя, тремя или всеми каналами при наличии пропорциональности отношения значения сигналов всех пар одноименных оптоэлектронных чувствительных элементов соответствующих измерительных каналов, уточняется с разной степенью точности масштабный коэффициент основного измерителя, а в случае идентификации неоднородности только одним каналом высокоточный измеритель переходит в режим одновременной идентификации двух разных областей неоднородностей, находящихся в поле зрения измерительных каналов высокоточного измерителя, после успешной идентификации одной или одновременно двух из которых также уточняется масштабный коэффициент основного измерителя, в случае же идентификации только одной неоднородности только одним каналом либо снижения точности определения масштабного коэффициента основного измерителя ниже заданного уровня корректировка масштабного коэффициента основного датчика временно блокируется и возобновляется через установленный интервал времени.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2552757C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2431847C1 |
| СПОСОБ ЗАКАЛКИ СТАЛЬНЫХ ДЕТАЛЕЙ | 0 |
|
SU314806A1 |

