Изобретение относится к области наземной навигации и может быть использовано в автономных системах наземной навигации, для которых требуется определение скорости и пройденного расстояния наземным транспортным средством (НТС) с высокой точностью. Для этого используется несколько измерителей скорости (расстояния), работающих параллельно.
Комплексные навигационные системы (КНС) вследствие имеющейся в них избыточной информации, наличия соответствующих корректирующих средств и автоматической обработки избыточной информации обладают точностью выше, чем любой из измерителей в отдельности.
Известно множество реализаций КНС для наземных транспортных средств, в которых для определения пройденного пути используются измерители, основанные на различных физических принципах определения параметров движения: механический датчик пути/скорости (МДП/МДС), доплеровский датчик скорости (ДДС), измерители линейных ускорений (акселерометры), корреляционно-экстремальные измерители скорости и др.
Необходимо отметить, что в большинстве случаев конструктивно существующие в настоящее время МДП и МДС весьма близки, разница между ними состоит лишь в принятом алгоритме обработки их выходных сигналов. Так количество импульсов на выходе МДП пропорционально пройденному НТС расстоянию, а количество импульсов на выходе МДП в единицу времени - пропорционально скорости НТС.
Известен также оптоэлектронный датчик скорости (ОЭДС). Принцип его работы основан на измерении времени задержки τ появления электрических сигналов (импульсов) на выходах первого и второго каналов ОЭДС, на входы которых (оптоэлектронные матрицы) поступают отраженные от подвижного основания, освещаемого минипрожектором, световые потоки [1].
Оптоэлектронные матрицы установлены на НТС и разнесены в пространстве на строго определенное расстояние  друг относительно друга в продольном направлении по ходу движения НТС. Известно устройство, в котором используется ОЭДС [2].
друг относительно друга в продольном направлении по ходу движения НТС. Известно устройство, в котором используется ОЭДС [2].
Недостатком является то, что во время движения НТС измерения, производимые точным оптоэлектронным измерителем, могут искажаться при воздействии внешних неблагоприятных дорожных условий. Эти искажения связаны в первую очередь с воздействием таких условий движения НТС, как наличие на дорожном покрытии воды, льда, свежего снега и пр. В этих условиях при освещении минипрожекторами ОЭДС дорожного покрытия отраженные сигналы от его неоднородностей, воспринимаемые первым и вторым каналами, могут быть либо слабыми, либо существенно отличаться. В этом случае для исключения ошибочной коррекции МДС результаты измерений ОЭДС необходимо заблокировать.
Известно устройство для измерения расстояния НТС как составная часть системы наземной навигации, в котором при измерении пройденного расстояния комплексируются механический и два доплеровских датчика скорости [3]. Причем при малых скоростях движения НТС датчики ДДС не используются, так как они дают при этом большую погрешность. Поэтому в этом случае используются только значения, измеренные с помощью МДС.
Наиболее близким по технической сущности изобретением (прототипом) является устройство, реализующее способ измерения расстояния, пройденного автомобилем [4], которое осуществляет коррекцию масштабного коэффициента механического датчика пути на основе анализа знака и величины ускорения автомобиля, определяемого датчиком линейных ускорений (акселерометром).
Данное устройство для измерения расстояния, пройденного автомобилем, содержит закрепленный на колесе датчик пути, счетчик пути, выполненный в виде генератора импульсов, схемы сравнения, программного переключателя, счетчика импульсов и индикатора, выход датчика пути соединен через генератор импульсов с первым входом схемы сравнения, выход программного переключателя соединен со вторым входом схемы сравнения, выход которой через счетчик импульсов соединен с входом индикатора, отличается тем, что введен блок анализа условий движения, состоящий из датчика линейных ускорений, элемента И-НЕ, первого и второго диодов, n-первых и вторых пороговых устройств, задатчика сигналов, причем выход датчика линейных ускорений одновременно соединен через элемент И-НЕ, первый и второй диоды соответственно с первым входом программного переключателя, первыми входами n-первых и вторых пороговых устройств, n-вторые входы которых соединены с n-выходами задатчиков сигналов, выходы n-первых и вторых пороговых устройств соединены соответственно со вторыми и третьими n-входами программного переключателя.
Недостатком данного устройства является следующее. Из физики известно, что датчик линейных ускорений (акселерометр), входящий в блок анализа условий движения, измеряет кажущееся ускорение [5]. Так как данный датчик расположен на шасси автомобиля, то на его ось чувствительности будет проектироваться не только ускорение в направлении движения автомобиля, но и ускорение силы тяжести в случае неравномерного распределения масс на передние и задние рессоры, что практически всегда имеет место (разное количество пассажиров на переднем и заднем сиденьях, груз в багажнике), а также при покачивании автомобиля во время движения относительно оси, перпендикулярной направлению движения автомобиля. Так, например, если автомобиль стоит, а из-за указанной выше неравномерности распределения масс угол наклона продольной оси автомобиля α составит всего один градус, то акселерометр покажет ускорение: w=g∗sin(α)=9.91·0.017=0.17 мc-2, где g - ускорение силы тяжести. Если бы автомобиль реально двигался с таким постоянным ускорением, то пройденный путь S, например за одну минуту (t=60 c), составил бы: S=0.17∗(60)2/2=308 м. Поэтому для высокоточного определения расстояния, пройденного НТС, необходимы дополнительные измерители пройденного расстояния.
Таким образом, можно сделать вывод, что из рассмотренных датчиков скорости и ускорения каждый из них имеет недостатки. Поэтому для повышения точности измерения расстояния, пройденного НТС, целесообразно комплексное их применение.
Технической задачей изобретения является создание устройства, позволяющего повысить точность определения пройденного НТС расстояния на основе обработки информации, поступающей на его входы, как от датчиков скорости и ускорения и их систем встроенного контроля (СК), так и учета информации о различных условиях его эксплуатации, поступающей от внешних источников.
Сущность предлагаемого устройства заключается в том, что в нем имеется специальный блок анализа (БА) условий функционирования, который представляет собой цифровой автомат с памятью, имеющий n входов y1…yп, L внутренних переменных xi и К выходов z1…zк, управляющий работой переключателя, в который поступает информация от датчиков скорости и ускорения.
С этой целью в предлагаемом устройстве по сравнению с прототипом помимо МДС, датчика линейных ускорений (акселерометра), переключателя, индикатора и схем сравнения введены в качестве дополнительных измерителей ДДС и ОЭДС, что в конечном итоге позволит получить более точную информацию о скорости движения НТС и пройденном им расстоянии. А для обработки информации с измерителей введен блок определения скорости и расстояния (ОС и Р) и используется специальный блок анализа условий функционирования, который управляет работой переключателя. Для этого БА имеет специальные входы для внутренних связей устройства, на которые поступает информация от СК датчиков скорости и ускорения, а также входы для внешней связи, на которые поступают внешние команды (ВК) о состоянии НТС (движение, остановка, регламент и т.д.). Блок анализа выполняет роль самонастройки устройства.
Причем для получения более высокой точности определения пройденного расстояния предлагается использовать «временной» способ комплексирования ОЭДС и МДС в соответствии с разработанным ранее способом определения скорости движения НТС [2].
Сигналы на выходах каналов ОЭДС представляют собой случайную последовательность импульсов различной длительности и амплитуды, так как неоднородности дорожного покрытия, отражающие световой поток от излучателя, разбросаны хаотично. Поэтому для надежной работы ОЭДС в данном устройстве НТС предлагается использовать прогнозируемые интервалы времени, вычисляемые с использованием показаний МДС, в которые должны попадать импульсы на выходе второго канала ОЭДС после появления соответствующих импульсов на выходе первого канала ОЭДС. Это позволяет значительно упростить аппаратуру и облегчить обработку результатов измерений за счет исключения импульсов, не попавших в ожидаемый интервал времени на выходе второго канала ОЭДС.
Указанные прогнозируемые интервалы времени определяются следующим образом. По информации, поступающей в навигационную систему от МДС в результате измерения им скорости движения НТС в предыдущие моменты времени ti, рассчитывается прогнозируемая скорость движения НТС в последующие моменты времени ti+1 с учетом того, что приращение скорости за малые отрезки времени невелико. На основании этих данных определяются временные интервалы, в которые должны попасть импульсы на выходе второго канала ОЭДС от одной и той же неоднородности дорожного покрытия, вслед за импульсами на выходе первого канала. Другими словами, прогнозируется ожидаемое время задержки τож между моментами появления сигналов на выходах первого и второго каналов ОЭДС, которое зависит от скорости движения НТС.
Последовательность ожидаемых задержек времени при поступлении данных импульсов определяется по следующей формуле:

где VМДС i - скорость, определяемая по информации МДС в i-ый момент времени.
Так как точное значение времени появления i-го ожидаемого импульса на выходе второго канала ОЭДС неизвестно, то необходимо определить границы временного интервала, в который должен попасть этот импульс Δτож.
Расчеты показывают, что эта величина обратно-пропорциональна скорости движения НТС и составляет примерно 30% времени прохождения расстояния, равного базовому расстоянию . Увеличение значения временного интервала Δτож нецелесообразно, так как увеличивается вероятность попадания в этот интервал нескольких ложных импульсов, не соответствующих истинному импульсу, который был на выходе первого канала ОЭДС [2]. Если в данный временной интервал попали несколько сходных по амплитуде импульсов, то данное измерение отбраковывается и процесс измерения повторяется.
. Увеличение значения временного интервала Δτож нецелесообразно, так как увеличивается вероятность попадания в этот интервал нескольких ложных импульсов, не соответствующих истинному импульсу, который был на выходе первого канала ОЭДС [2]. Если в данный временной интервал попали несколько сходных по амплитуде импульсов, то данное измерение отбраковывается и процесс измерения повторяется.
Заявляемое устройство для автономного определения расстояния, пройденного наземным транспортным средством, содержит механический датчик скорости, акселерометр, блок анализа условий функционирования НТС, индикатор, переключатель, информационные входы которого соединены с выходами датчиков скорости и ускорения, а командные входы - с блоком анализа соответственно в то время как его выходы соединены с блоком определения скорости и расстояния и далее соединены с индикатором, отличается тем, что введены дополнительно доплеровский и оптоэлектронный датчики скорости, информация на выходе которых также как и информация остальных датчиков используется в зависимости от условий движения наземного транспортного средства, а также от показаний систем контроля датчиков скорости и ускорения; блок анализа условий функционирования транспортного средства, состоящий из дешифратора, соединенного своими входами с запоминающим устройством, схемой сравнения и с шиной внешних команд, а выходами - с матрицей логических схем И-ИЛИ; запоминающего устройства, связанного своими входами с системами контроля датчиков скорости и ускорения; схемы сравнения, соединенной с выходным устройством блока определения скорости и расстояния; матрицы логических схем И-ИЛИ, выходы которой соединены с командными входами переключателя, а его информационные входы - с выходами датчиков скорости и ускорения; блок определения скорости и расстояния, состоящий из арифметико-логического устройства, соединенного своими входами с переключателя и счетчиком количества интервалов измерений, а выходом - с выходным устройством; счетчик количества интервалов измерений, вход которого соединен с генератором, а выход - подключен к входу выходного устройства и арифметико-логического устройства; выходного устройства, своими выходами подключенного к схеме сравнения блока анализа и индикатору.
Признаками данного устройства, совпадающими с существенными признаками заявляемого устройства, являются: закрепленный на колесе датчик пути/скорости, акселерометр, индикатор, переключатель, генератор импульсов, счетчик импульсов.
Существенными отличительными признаками по устройству являются датчики скорости ДДС и ОЭДС, своими выходами связанные с переключателем; блок анализа внешних условий функционирования НТС и внутреннего его состояния, состоящий из дешифратора (Д), устройства памяти (ЗУ), схемы сравнения (Сх. ср) текущих значений скорости с константой, матрицы логических элементов И-ИЛИ (Матр. И-ИЛИ); определитель скорости и расстояния (ОС и Р), состоящего из арифметико-логического устройства (АЛУ), счетчика интервалов измерений (Сч), генератора (Ген) и выходного устройства (ВУ) данного блока; и новые связи между ними.
Использование всех новых признаков позволит повысить точность измерения скорости движения НТС и пройденного им расстояния за счет учета условий его функционирования, анализа информации от СК о техническом состоянии датчиков скорости и ускорения и осуществлении автоматической коррекции масштабного коэффициента МДС от более точных измерителей скорости.
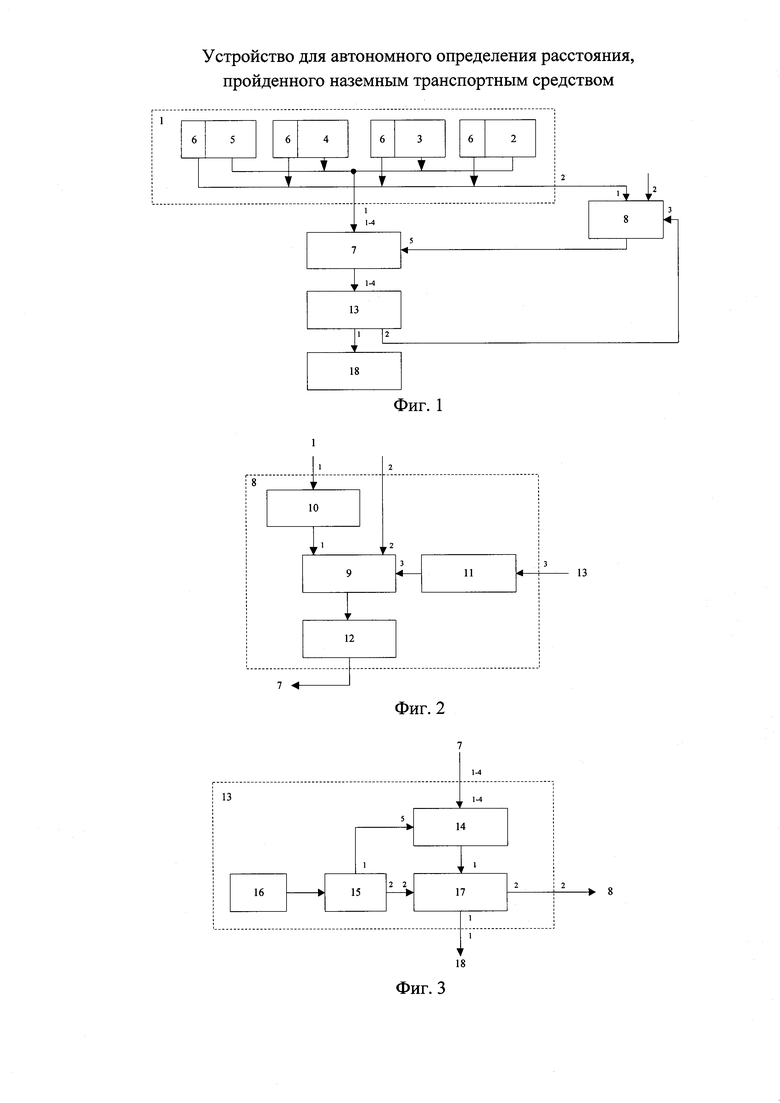
На фиг. 1 приведена схема устройства для измерения расстояния, пройденного НТС. Устройство содержит: блок измерителей (ИС) - 1, включающий датчик МДС - 2, акселерометр - 3, датчик ДДС - 4, датчик ОЭДС - 5 с системами контроля - 6, связанными с первым входом блока анализа 8, в каждом из датчиков, схема которого приведена на фиг. 2; переключатель 7, на информационные входы 1-4 которого поступает информация с блока 1 и команды на другой его вход 5 с блока 8, а его выходы 1-4 связаны с блоком определителя скорости и расстояния 13, схема которого приведена на фиг. 3; блок анализа 8, включающий дешифратор 9, состоящий из 5 секций, выбор каждой из которых определяется информацией от систем контроля 6 датчиков скорости и ускорения. Информация от СК хранится в запоминающемся устройстве 10 и считывается из него в процессе функционирования устройства. Кроме этого на второй вход блока анализа 8 поступает информация с шины внешних команд ВК об условиях движения НТС и на третий его вход - от блока 13 через схему сравнения 11, входящую также в состав блока 8, в которой хранится для сравнения с текущим значением скорости фиксированная константа скорости. Информационные выходы дешифратора 9 через матрицу логических схем И-ИЛИ 12 связаны с командными входами 5 переключателя 7. Определитель скорости и расстояния 13, схема которого приведена на фиг. 3, имеет в своем составе арифметико-логическое устройство 14, связанное своим выходом с первым входом выходного устройства 17, а входами 1-4 с переключателем 7 и входом 5 - со счетчиком интервалов 15, входящим в блок 13; генератор 16, связанный со счетчиком 15; выходное устройство 17, выход 1 которого соединены с индикатором 18, а выход 2 - c блоком анализа 8, и отличается от прототипа тем, что введены ДДС и ОЭДС, выходы которых соединены через переключатель 7 с информационными входами 1-4 блока ОС и Р, а выходы систем контроля 6 всех датчиков информации с первым входом блока БА. В блоке ОС и Р производится вычисление среднего значения, пройденного НТС расстояния, которое поступает в блок Инд 18, а также определение скорости движения НТС, значения которой необходимы для работы БА.
В блоке БА дешифратор 9 может быть собран на 5 микросхемах (мс) К134ИД3, на 16 выходов каждый; запоминающее устройство 10 - на мс К134РУ6; схема сравнения 11 - на К134СП1 и КР134ТМ2; матрица И-ИЛИ - 12 - на программируемых логических матрицах ПЛМ.
В блоке 13 арифметико-логическое устройство 14 может быть реализовано на мс К134ИП3; счетчик интервалов 15 - на мс К134ИЕ5; генератор импульсов 16 - на мс К119ГГ1. Для индикатора 18 могут быть использованы индикаторы типа ИВ-1В.
Каждый из датчиков скорости выполнен с учетом физических принципов их построения.
Механический датчик скорости связан через привод с колесами объекта и вырабатывает при движении НТС последовательности электрических импульсов о приращениях пути с помощью индуктивных катушек, в пазы магнитопроводов которых входят зубцы вращающегося диска, связанного с приводом. На выходах катушек индуктивностей вырабатываются последовательности импульсов с частотой, пропорциональной скорости движения НТС. Таким образом, измеряя частоту импульсов, поступающих от МДС, за некоторый промежуток времени Δt, определяется скорость движения НТС. Основным недостатком МДС является невысокая точность измерения скорости движения транспортного средства.
Доплеровский датчик скорости измеряет скорость движения НТС с помощью генерирования и приема отраженных от поверхности Земли высокочастотных сигналов и определения частотного сдвига между ними. На выходе ДДС вырабатываются импульсы, частота следования которых пропорциональна скорости движения объекта. В состав ДДС входят: блок высокочастотный, содержащий рупорно-щелевые антенны, волноводы, полупроводниковый генератор, детекторы принимаемых сигналов, смесители сигналов гетеродина и приемника, усилители-ограничители, преобразователь частота-напряжение.
Акселерометр является инерциальным датчиком скорости, измеряющим ускорение при движении НТС. В устройстве может быть использован маятниковый акселерометр типа АК-5 [6]. Электронный блок акселерометра содержит генератор питания датчика перемещений, фазочувствительный выпрямитель, масштабирующий усилитель, корректирующее устройство, фильтр и усилитель мощности.
В качестве оптоэлектронного датчика возможно использование датчика, в котором применены оптическая система с объективом "Зенитар" (фокусное расстояние 50 см), фотоприемная матрица "Аэрофон" с частотным диапазоном 0-10000 Гц, интегральные усилители типа К140-УД1, минипрожекторы - фонари галогенные ФАГ-1А.
Переключатель, выполняющий роль коммутатора, может быть собран на мультиплексорах.
Целью настоящего изобретения является повышение точности измерения пройденного НТС расстояния во всех условиях применения навигационной системы.
В устройстве автономного определения расстояния, пройденного НТС, по сравнению с прототипом введены в качестве дополнительных более точные измерители скорости ДДС и ОЭДС, что позволит получить более точную информацию о пройденном НТС расстоянии. А для обработки сигналов с измерителей использовать специальный блок - блок анализа, который управляет работой переключателя, связанного с измерителями скорости и ускорения, в зависимости от внешних условий функционирования НТС и внутреннего состояния устройства. Для этого БА имеет специальные входы, на которые поступает как информация от систем контроля более точных измерителей и менее точного МДС, так и кодированная информация от внешних источников, задаваемых в виде ВК. В зависимости от указанных условий предлагаемое в заявке на изобретение устройство определения пройденного НТС расстояния работает следующим образом.
В начале движения после любой остановки НТС блок анализа 8 вырабатывает сигналы в соответствии на данный момент времени ситуацией, задаваемой ВК в виде кодовых комбинаций FAвк, поступающих на его входы, например, движению НТС по маршруту со скоростью менее или более 5 км/ч, движение по контрольному участку, все датчики скорости НТС исправны или какой-то из них неисправен, исключение генерирования радиочастот во время работы ДДС и т.д. Таким образом, функцию состояний устройства можно записать в следующем виде:

где xi - состояние датчиков скорости НТС ("исправен", "неисправен") (i=1…4), cj - показания систем контроля СК датчиков скорости и ускорения (i=1…4), Авк - внешняя информация об условиях функционирования устройства (к=1…8), V - скорость движения НТС.
В результате этого на соответствующей выходной шине дешифратора 9 блока анализа вырабатывается сигнал, который считывает информацию с матрицы логических схем И-ИЛИ-12 в соответствии с логикой работы устройства согласно приведенной ниже системе уравнений (2)
где FАвк1…FАвк8 - состояния устройства, определяемые информацией на входах 1 и 2 БА 8, х1 - исправное состояние МДС;  - неисправное состояние МДС; x2 - исправное состояние акселерометра;
- неисправное состояние МДС; x2 - исправное состояние акселерометра;  - неисправное состояние акселерометра; x3 - исправное состояние ДДС;
- неисправное состояние акселерометра; x3 - исправное состояние ДДС;  - неисправное состояние ДДС; x4 - исправное состояние ОЭДС;
- неисправное состояние ДДС; x4 - исправное состояние ОЭДС;  - неисправное состояние ОЭДС и на переключатель 7 поступает кодовая комбинация сигналов с матрицы 12, разрешающая прохождение по информационным его выходам информации с разрешенных в данный момент датчиков скорости и ускорения xi на информационные входы блока 13. В блоке 13 происходит необходимая обработка принятой из переключателя 7 информации в соответствии со следующей системой уравнения (3):
- неисправное состояние ОЭДС и на переключатель 7 поступает кодовая комбинация сигналов с матрицы 12, разрешающая прохождение по информационным его выходам информации с разрешенных в данный момент датчиков скорости и ускорения xi на информационные входы блока 13. В блоке 13 происходит необходимая обработка принятой из переключателя 7 информации в соответствии со следующей системой уравнения (3):
где UAi - усредненная информация о скорости движения НТС в зависимости от условий функционирования устройства (i=1…8); yj - информация о скорости движения НТС, поступающая от датчиков скорости и ускорения (j=1…4).
Для выработки информации о скорости и пройденном НТС расстоянии в блоке определения скорости и расстояния 13, как показано на фиг. 3, имеются арифметико-логическое устройство 14, в котором производится обработка информации, представленной системой уравнений (2); счетчик интервалов 15, в котором производится суммирование количества интервалов измерений, задаваемых с помощью генератора импульсов 16, и суммирование отрезков пути, проходимых НТС; выходное устройство 17, форматирующее выходную информацию.
Кроме этого из блока ОС и Р подается информация в БА, необходимая для его работы, например скорость движения НТС, для ее сравнения с фиксированной константой, хранящейся в БА. В зависимости от результатов сравнения в БА вырабатывается соответствующая команда.
Разность между показаниями МДС и значениями усредненной скорости движения НТС в виде поправочных коэффициентов фиксируется в устройстве и используется для подкалибровки значений МДС при определении расстояния, пройденного НТС.
Таким образом, повышается точность измерения расстояния, проходимого НТС, на основе анализа информации от высокоточных датчиков скорости и ускорения, их СК, учета условий функционирования НТС и автоматической коррекции единичного приращения пути в зависимости от условий движения.
Источники информации
1. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. М.: "Сов. радио", 1974, 392 с.
2. Кутузов С.В., Макаров В.А., Кулешов В.В. Патент 2431847 С1 РФ, МПК G01P 3/50 (2006.01) "Способ определения скорости движения наземного транспортного средства". 2010101941/20. Заяв. 22.01.10. Опубл.20.10.11. Бюл. №29.
3. Солодов В.И. Системы наземной навигации. - М.: ВА РВСН им. Петра Великого, 1998, 128 с.
4. Епифанов В.В., Мужичек С.М. Патент 2300080 С1 РФ, МПК G01C 22/00 (2006/01) "Способ измерения расстояния, пройденного автомобилем, и устройство для его осуществления". 2005139221/28, 15.12.2005.
5. Командно-измерительные приборы / Б.И. Назаров, В.В. Булатов, Н.П. Ломейко и др. Под общ. ред. Б.И. Назарова. М.: МО СССР, 1975, 480 с.
6. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. - Санкт-Петербург.: Электроприбор, 2009, 278 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2549607C1 |
| Устройство измерения скорости наземного транспортного средства | 2019 |
|
RU2711539C1 |
| Устройство для автономного определения расстояния, пройденного наземным транспортным средством | 2021 |
|
RU2768547C1 |
| Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства | 2019 |
|
RU2723892C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2552757C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| Способ определения скорости движения наземного транспортного средства | 2018 |
|
RU2680654C1 |
| Способ определения скорости движения наземного транспорта | 2022 |
|
RU2805016C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2431847C1 |
| Способ измерения скорости движения наземного транспортного средства | 2022 |
|
RU2787685C1 |
Устройство для автономного определения расстояния, пройденного наземным транспортным средством, относится к области наземной навигации и может быть использовано в системах наземной навигации, для которых требуется определение скорости и пройденного наземным транспортным средством расстояния с высокой точностью. Технический результат - повышение точности автономного определения расстояния, пройденного наземным транспортным средством. Для достижения данного результата производят необходимые измерения с помощью датчиков скорости и ускорений с учетом внешних условий функционирования транспортного средства и технического состояния узлов устройства и обработку полученной информации. При этом осуществляют автоматическую подкалибровку механического датчика скорости. Устройство содержит датчики скорости и ускорений, переключатель, блок анализа функционирования, блок определения скорости и расстояния, индикатор. Причем в блок анализа функционирования входят дешифратор, запоминающее устройство, схема сравнения, матрица логических схем И-ИЛИ; в блок определения скорости и расстояния - арифметико-логическое устройство, генератор, счетчик интервалов, выходное устройство. 3 ил.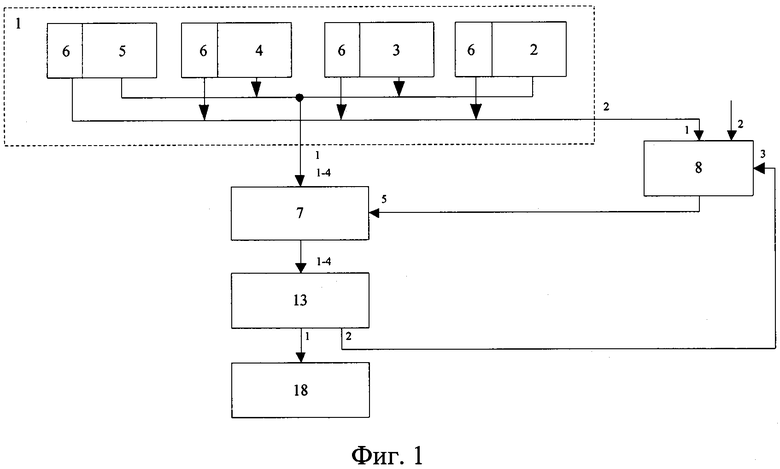
Устройство для автономного определения расстояния, пройденного наземным транспортным средством, содержащее механический датчик скорости, акселерометр, индикатор, переключатель и блок анализа, отличающееся тем, что в него введены дополнительно доплеровский и оптоэлектронный датчики скорости, системы контроля и блок определения скорости и расстояния, причем выходы всех датчиков соединены с соответствующими входами переключателя, выходы которого соединены с соответствующими входами блока определения скорости и расстояния, первый выход которого соединен с индикатором, а второй выход соединен с третьим входом блока анализа, первый вход которого подключен к выходу систем контроля, а на второй вход блока анализа поступает управляющий сигнал от шины внешних команд, выход же блока анализа соединен с пятым входом переключателя; блок анализа состоит из дешифратора, запоминающего устройства, схемы сравнения и матрицы логических схем И-ИЛИ, причем дешифратор соединен своими входами с запоминающим устройством, схемой сравнения и с шиной внешних команд, а выходом соединен с матрицей логических схем И-ИЛИ; блок определения скорости и расстояния состоит из генератора, счетчика, выходного устройства и арифметико-логического устройства, причем пятый вход последнего соединен с первым выходом счетчика, а выход подключен к первому входу выходного устройства, второй вход которого соединен со вторым выходом счетчика, вход которого подключен к выходу генератора.
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО АВТОМОБИЛЕМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2300080C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| Устройство для измерения расстояния,пройденного автомобилем | 1984 |
|
SU1303827A1 |
| СПОСОБ ЗАКАЛКИ СТАЛЬНЫХ ДЕТАЛЕЙ | 0 |
|
SU314806A1 |

