Изобретение относится к области навигации наземных транспортных средств (НТС) и может быть использовано в автономных системах наземной навигации, в которых требуется определение с высокой точностью скорости движения и пройденного НТС расстояния с использованием нескольких измерителей параметров навигации, работающих совместно.
Комплексные навигационные системы (КНС) вследствие имеющейся в них избыточной информации, наличия автоматической коррекции навигационной информации позволяют получить более точные результаты измерений параметров навигации, чем любой отдельный измеритель [1].
В качестве дополнительных измерителей используются измерители, основанные на различных физических принципах определения навигационных параметров.
Известно множество реализаций КНС для наземных транспортных средств, в которых для определения скорости и пройденного пути используются измерители, основанные на различных физических принципах: механический датчик пути/скорости (МДП/МДС), доплеровский датчик скорости (ДДС), измерители линейных ускорений (акселерометры), корреляционно-экстремальные измерители скорости и другие.
Известен также способ определения скорости движения наземного транспортного средства [2], где для коррекции показаний механического датчика скорости используется оптоэлектронный датчик скорости (ОЭДС). Принцип его работы основан на измерении времени задержки τ между появлениями электрических сигналов (импульсов) на выходах светочувствительных линеек первого и второго каналов приемной матрицы ОЭДС, расположенных на НТС по направлению его движения. На входы линеек поступают отраженные от дорожного покрытия, освещаемого мини прожектором ОЭДС, световые потоки Ф(t) и Ф(t+τ). Светочувствительные линейки оптоэлектронной матрицы разнесены при их установке на шасси НТС на строго определенное расстояние  называемое в дальнейшем «базой», друг относительно друга в продольном направлении по ходу движения НТС. Тогда скорость V движения НТС может быть определена в соответствии с формулой:
называемое в дальнейшем «базой», друг относительно друга в продольном направлении по ходу движения НТС. Тогда скорость V движения НТС может быть определена в соответствии с формулой:
Основное отличие принципа действия ОЭДС от других датчиков, близких по принципам измерения скорости движения, например, от корреляционно-экстремальных измерителей скорости (ИС) заключается в том, что оценивается не вся совокупность сигналов на выходах обоих каналов ОЭДС, а лишь отдельные, характерные импульсы, имеющие достаточно большие амплитуды отраженных сигналов.
Наиболее близким по технической сущности изобретением (прототипом) является устройство [3], реализующее способ определения скорости движения наземного транспортного средства [2], в котором используется основной и дополнительный измерители скорости. В качестве основного был использован МДС, который является достаточно надежным и простым измерителем, но при относительно невысокой точности измерений навигационных параметров. В качестве дополнительного измерителя применен ОЭДС, который имеет более высокую точность измерений по сравнению с МДС.
В рассмотренном устройстве кроме непрерывного измерения скорости движения МДС вырабатывает прогнозируемые значения отрезков интервалов времени, в которых должны измеряться сигналы чувствительным элементом (ЧЭ) второго канала ОЭДС при любой допустимой скорости движения НТС.
Данное устройство для измерения пройденного расстояния содержит помимо МДС и ОЭДС: генератор импульсов G, счетчик импульсов СТ, интегратор ИНТ, триггер Т, логическую схему И, вычислитель СР.
Устройство работает следующим образом: МДС 1 непрерывно измеряет скорость движения НТС Vнтс(t) и результаты измерений с его выхода VМДС(t) поступают на вход 1 вычислителя CP 7, который на основании этих измерений прогнозирует значения скорости в следующие моменты времени. Оптоэлектронный датчик 2 подключается для начала измерений Vнтс(t) своим первым (по ходу движения НТС) ЧЭ в дискретные моменты времени по команде, поступающей из вычислительного устройства CP 7 с его выхода 1. В результате этого на выходе 2 ОЭДС появляется сигнал, который поступает на вход 2 триггера Т 4, устанавливая его в состояние «единицы», которое разрешает тем самым начать производить отсчет импульсов с выхода генератора G 5 в счетчике СТ 6 на его входе 2.
Счет импульсов в указанном счетчике будет производиться до тех пор, пока не сработает 2-ой вход ОЭДС 2 в момент времени ti+τ. Причем срабатывание указанного входа должно производиться в интервале времени, которые определяются в вычислителе CP и фиксируется с помощью поступающей с его выхода 1 команды. Так как в качестве дополнительного измерителя применен ОЭДС, который имеет более высокую точность измерений по сравнению с МДС, то будет получено на выходе счетчика СТ 6 необходимое количество импульсов, пропорциональное времени задержки отраженных от одной и той же неоднородности сигналов, принятых первым и вторым входами ОЭДС 2. Полученные значения данного измерителя поступают на вход 2 вычислителя CP 7, где обрабатываются и используются в дальнейшем для выработки уточненных значений скорости движения Vоэдс(t) на выходе 2 вычислителя CP 7. После интегрирования данной скорости интегратором ИНТ 8 получим пройденное НТС расстояние Sоэдс(t).
Признаками данного устройства, совпадающими с существенными признаками заявляемого устройства являются механический и оптоэлектронный датчики скорости, генератор и счетчик импульсов, триггер, вычислитель, интегратор и логическая схема И.
Недостатками рассмотренного наиболее близкого по технической сущности устройства являются следующие.
1. Во время движения НТС измерения, производимые точным оптоэлектронным измерителем, могут искажаться при воздействии внешних неблагоприятных дорожных условий. Эти искажения связаны в первую очередь с наличием на дорожном покрытии воды, льда, свежего снега и пр. В этих условиях при освещении мини прожекторами ОЭДС дорожного покрытия отраженные сигналы от его неоднородностей, воспринимаемые ЧЭ первого и второго каналов ОЭДС, могут быть либо слабыми, либо отсутствовать. В устройстве в этих случаях отсутствуют действия, связанные с сохранением результатов измерений, полученных ранее или показаний МДС.
2. Уровни сигналов ЧЭ первого и второго каналов ОЭДС могут различаться между собой выше допустимой нормы, что не позволяет получить уточненные значения параметров навигации с помощью ОЭДС.
3. При расхождении в показаниях МДС и ОЭДС, превышающих определенный уровень, также выполняется ошибочная коррекция показаний МДС.
Разработка предлагаемого устройства по определению расстояния, пройденного наземным транспортным средством, основывается на способе автономного определения скорости движения наземного транспортного средства [4].
Технической задачей предлагаемого устройства является повышение точности измерения скорости движения НТС и пройденного им расстояния.
С этой целью в предлагаемом устройстве определения скорости движения НТС в качестве основного измерителя также используются МДС, и в качестве дополнительного - ОЭДС, основанный на измерении времени задержки τ сигналов при приеме их его светочувствительными элементами. Причем для получения более высокой точности определения пройденного расстояния по сравнению с МДС используется так же как и в прототипе временной способ их комплексирования.
Сигналы на выходах каналов ОЭДС представляют собой случайную последовательность импульсов различной длительности и амплитуды, так как неоднородности дорожного покрытия, отражающие световой поток от излучателя, разбросаны хаотично. Поэтому для надежной работы ОЭДС в данном устройстве предлагается также использовать прогнозируемые интервалы времени, вычисляемые на основе показаний МДС, в которые должны попадать импульсы на выходе второго канала ОЭДС после появления соответствующих импульсов на выходе первого канала ОЭДС. Это позволяет облегчить обработку результатов измерений за счет исключения импульсов, не попавших в ожидаемый интервал времени на выходе второго канала ОЭДС.
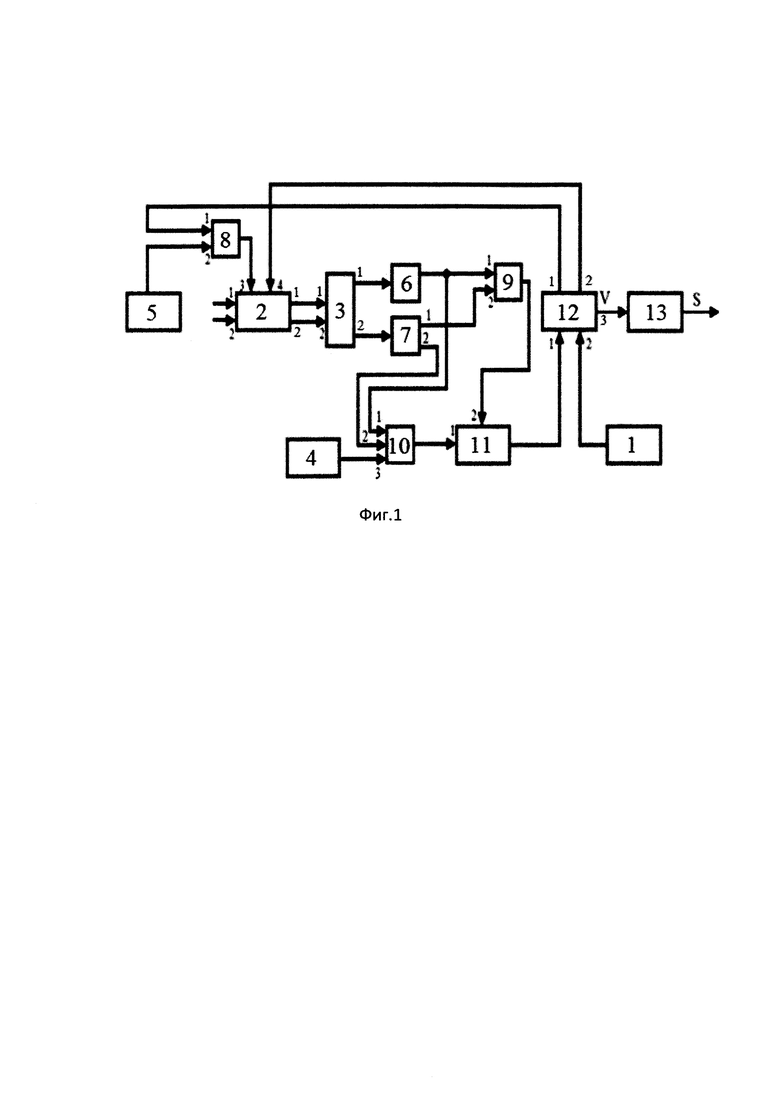
Предлагаемое устройство для автономного определения расстояния, пройденного НТС, содержащее: механический датчик скорости, оптоэлектронный датчик скорости, генератор импульсов, счетчик импульсов, вычислитель, интегратор, триггер, логическую схему И, отличается от прототипа тем, что в него дополнительно введены: второй генератор импульсов, вторая и третья логические схемы И, сдвоенный компаратор и второй триггер, причем выход второго генератора подключен ко второму входу первой логической схемы И, а к ее первому входу соответственно подключен первый выход вычислителя, а ее выход подключен к третьему входу оптоэлектронного датчика скорости, к четвертому входу которого подключен второй выход вычислителя, а к первому и второму входам оптоэлектронного датчика скорости подключены чувствительные элементы, при этом сдвоенный компаратор первым и вторым входами подключен к первому и второму выходам оптоэлектронного датчика скорости, своими первым и вторым выходами подключен соответственно ко входам первого и второго триггеров, в свою очередь, выход первого триггера соединен с первыми входами второй и третьей логических схем, а первый выход второго триггера соединен со вторым входом третьей логической схемы и вторым своим выходом соединен со вторым входом второй логической схемы, причем третий вход второй логической схемы соединен с выходом первого генератора, а выход третьей логической схемы и выход второй логической схемы подключены соответственно к первому и второму входам счетчика импульсов, выход которого соединен с первым входом вычислителя, а второй его вход соединен с выходом механического датчика скорости, при этом выход вычислителя соединен со входом интегратора, выход которого является выходом устройства.
Второй генератор импульсов G2 определяет периодичность измерений скорости НТС. Сдвоенный стробируемый компаратор К сигналов ЧЭ позволяет выделить сигналы, находящиеся в интервалах между двумя пороговыми значениями напряжений, подаваемыми на другие входы компаратора, сравнить уровни расхождения сигналов на выходах первого и второго каналов ОЭДС. Он соединен со входами триггеров Т1 и Т2, выходы которых подключены к логической схеме И2, выходной уровень которой управляют считыванием информации со счетчика СТ при отсутствии расхождения уровней сигналов первого и второго каналов ОЭДС, превышающих допустимое значение. В вычислителе CP сравниваются результаты измерений МДС и ОЭДС и при их значительном расхождении временно блокируются результаты измерений с ОЭДС. Для этого на вход 4 ОЭДС подается блокирующий сигнал с выхода 2 СР.
Структурная схема предлагаемого устройства приведена на фиг. 1 и включает следующие элементы: 1 - МДС; 2 - ОЭДС; 3 - компаратор; 4 - генератор импульсов d; 5 - генератор импульсов G2; 6 - элемент памяти Т1 (триггер); 7 - элемент памяти Т2; 8 - логический элемент И1; 9 - логический элемент И3; 10 - логический элемент И2; 11 - счетчик импульсов СТ; 12 - вычислитель CP; 13 - интегратор ИНТ.
Устройство работает следующим образом: МДС непрерывно измеряет скорость движения НТС Vнтс(t) и его результаты измерений с выхода поступают на вход 2 вычислителя CP, который на основании этих измерений прогнозирует значения скорости НТС в следующие моменты времени, т.к. скорость НТС в течение коротких промежутков времени меняется не значительно, а на вход 1 CP поступают результаты измерений с выхода счетчика импульсов СТ, в результате этого в CP производится сравнение результатов измерений МДС и ОЭДС. При расхождении результатов сравнения выше допустимой нормы сигнал с выхода 1 CP, поступающий на вход 1 логической схемы И1, прерывает измерения ОЭДС. Во время каждого измерения работает генератор G2, который определяет периодичность измерений, и с его выхода сигналы поступают на вход 2 логической схемы И1.
Оптоэлектронный датчик подключается в начале измерений своим первым (по ходу движения НТС) ЧЭ в дискретные моменты времен, определяемые периодичностью измерений, по команде, поступающей с выхода 2 вычислителя СР. В результате этого на выходе 1 ОЭДС появляется сигнал, который поступает на вход триггера Т1, через компаратор К, в котором производится контроль уровней сигналов первого и второго каналов ОЭДС (входы 1, 2) и при положительном результате их контроля устанавливает его в состояние, которое разрешает производить счет импульсов с выхода генератора G1 в счетчике СТ.
Счет импульсов в указанном счетчике будет производиться до тех пор, пока не сработает 2-ой вход ОЭДС-2 в момент времени ti+τ. Причем срабатывание входа должно производиться в интервале времени, которое определяется в вычислителе CP на основании информации, получаемой с МДС, и фиксируется с помощью поступающей с его выхода 2 команды.
Таким образом, на выходе счетчика импульсов СТ будет отсчитано количество импульсов с генератора G1, пропорциональное времени задержки отраженных от одной и той неоднородности дорожного покрытия сигналов, принятых ЧЭ первого и второго входов ОЭДС
Полученные значения данного измерителя поступают на вход 1 вычислителя CP, где обрабатываются и используются в дальнейшем для выработки уточненных значений скорости движения Vоэдс(t) на выходе 3 вычислителя СР.
После интегрирования полученных значений скорости интегратором ИНТ будет получено уточненное значение расстояния Sоэдс(t), на основании которого вырабатываются поправочные коэффициенты при подкалибровке значений МДС.
Таким образом, данное устройство обеспечивает повышение точности измерения пройденного НТС расстояния на основе информации, полученной в результате измерений с помощью МДС и ОЭДС, контроля уровней входных сигналов и выработке в вычислителе поправочных коэффициентов, используемых при подкалиброке МДС.
Источники информации
1. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. - М.: "Советское радио", 1974, 392 с.
2. Кулешов В.В., Макаров В.А., Кутузов С.В. Патент РФ №2431847, «Способ определения скорости движения наземного транспортного средства».
3. Кулешов В.В., Макаров В.А., Павлов Р.А., Донченко А.А. Патент РФ №2549697, «Устройство для определения расстояния, пройденного наземным транспортным средством».
4. Макаров В.А., Кулешов В.В. Патент №2624335, «Способ автономного определения скорости движения наземного транспортного средства».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2549607C1 |
| Устройство измерения скорости наземного транспортного средства | 2019 |
|
RU2711539C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТОМ | 2015 |
|
RU2584794C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2552757C1 |
| Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства | 2019 |
|
RU2723892C1 |
| Способ определения скорости движения наземного транспортного средства | 2018 |
|
RU2680654C1 |
| Способ определения скорости движения наземного транспорта | 2022 |
|
RU2805016C1 |
| Способ измерения скорости движения наземного транспортного средства | 2022 |
|
RU2787685C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2431847C1 |
Изобретение относится к области приборостроения и может найти применение в системах автономного определения пройденного пути наземным транспортным средством. Устройство для автономного определения расстояния, пройденного наземным транспортным средством, содержит механический датчик скорости, оптоэлектронный датчик скорости, генератор импульсов, счетчик импульсов, вычислитель, интегратор, первую логическую схему И, первый триггер. При этом в заявленное устройство дополнительно введены второй генератор импульсов, вторая и третья логические схемы И, сдвоенный компаратор и второй триггер, причем выход второго генератора подключен ко второму входу первой логической схемы И, а к ее первому входу соответственно подключен первый выход вычислителя, а ее выход подключен к третьему входу оптоэлектронного датчика скорости, к четвертому входу которого подключен второй выход вычислителя, а к первому и второму входам оптоэлектронного датчика скорости подключены чувствительные элементы. При этом сдвоенный компаратор первым и вторым входами подключен к первому и второму выходам оптоэлектронного датчика скорости, своими первым и вторым выходами подключен соответственно ко входам первого и второго триггеров, в свою очередь, выход первого триггера соединен с первыми входами второй и третьей логических схем, а первый выход второго триггера соединен со вторым входом третьей логической схемы и вторым своим выходом соединен со вторым входом второй логической схемы, причем третий вход второй логической схемы соединен с выходом первого генератора, а выход третьей логической схемы и выход второй логической схемы подключены соответственно к первому и второму входам счетчика импульсов, выход которого соединен с первым входом вычислителя, а второй его вход соединен с выходом механического датчика скорости, при этом выход вычислителя соединен с входом интегратора, выход которого является выходом устройства. Технический результат – повышение точности по сравнению с системами, где для измерения пройденного пути используется механический и оптоэлектронный датчики скорости без дополнительных аппаратных средств контроля параметров измеряемых сигналов. 1 ил.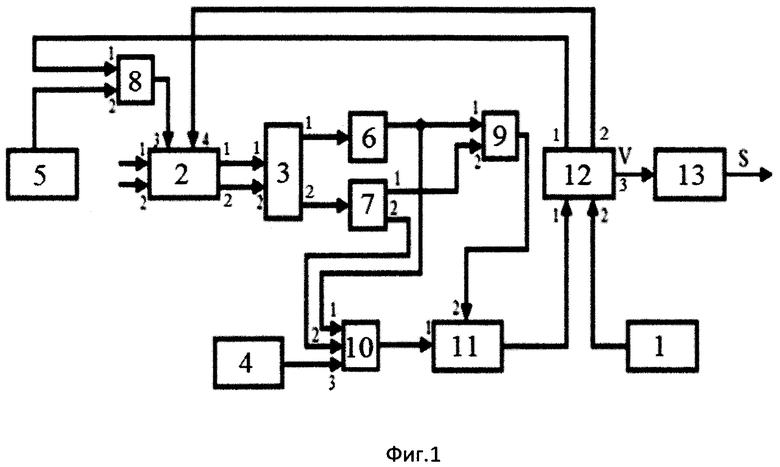
Устройство для автономного определения расстояния, пройденного наземным транспортным средством, содержащее механический датчик скорости, оптоэлектронный датчик скорости, генератор импульсов, счетчик импульсов, вычислитель, интегратор, первую логическую схему И, триггер, отличающееся тем, что в него дополнительно введены второй генератор импульсов, вторая и третья логические схемы И, сдвоенный компаратор и второй триггер, причем выход второго генератора подключен к второму входу первой логической схемы И, а к ее первому входу соответственно подключен первый выход вычислителя, а ее выход подключен к третьему входу оптоэлектронного датчика скорости, к четвертому входу которого подключен второй выход вычислителя, а к первому и второму входам оптоэлектронного датчика скорости подключены чувствительные элементы, при этом сдвоенный компаратор первым и вторым входами подключен к первому и второму выходам оптоэлектронного датчика скорости, своими первым и вторым выходами подключен соответственно к входам первого и второго триггеров, в свою очередь, выход первого триггера соединен с первыми входами второй и третьей логических схем, а первый выход второго триггера соединен с вторым входом третьей логической схемы и вторым своим выходом соединен с вторым входом второй логической схемы, причем третий вход второй логической схемы соединен с выходом первого генератора, а выход третьей логической схемы и выход второй логической схемы подключены соответственно к первому и второму входам счетчика импульсов, выход которого соединен с первым входом вычислителя, а второй его вход соединен с выходом механического датчика скорости, при этом выход вычислителя соединен с входом интегратора, выход которого является выходом устройства.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2549607C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2242767C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТОМ | 2015 |
|
RU2584794C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| US 10338600 B2, 02.07.2019. | |||

