Изобретение относится к области навигации наземных транспортных средств (НТС) и может быть использовано в автономных системах наземной навигации, в которых для определения пройденного расстояния НТС с высокой точностью применяется комплексирование нескольких измерителей скорости (расстояния).
Комплексные навигационные системы (КНС) вследствие имеющейся в них избыточной информации, наличия соответствующих корректирующих средств и автоматической обработки избыточной информации обладают точностью выше, чем любой из измерителей в отдельности.
Известно множество реализации КНС для наземных транспортных средств, в которых для определения пройденного пути используются измерители, основанные на различных физических принципах определения параметров движения: механический датчик пути/скорости (МДП/МДС), доплеровский датчик скорости (ДДС), измерители линейных ускорений (акселерометры), корреляционно-экстремальные измерители скорости и др.
Необходимо отметить, что в большинстве случаев конструктивно существующие в настоящее время МДП и МДС весьма близки, разница между ними состоит лишь в принятом алгоритме обработки их выходных сигналов. Так, количество импульсов на выходе МДП пропорционально пройденному НТС расстоянию, а количество импульсов на выходе МДП в единицу времени пропорционально скорости НТС.
Известен также оптоэлектронный датчик скорости (ОЭДС) [1]. Принцип его работы основан на измерении времени задержки τ появления электрических сигналов (импульсов) на выходах первого и второго каналов ОЭДС, на выходы которых (оптоэлектронные матрицы) поступают отраженные от дорожного покрытия, освещаемого микропрожектором, световые потоки Ф(t) и Ф(t+τ).
Оптоэлектронные матрицы установлены на НТС и разнесены в пространстве на строго определенное расстояние ℓБ относительно друг друга в продольном направлении по ходу движения НТС. Тогда скорость V движения НТС может быть определена в соответствии с формулой:
Vоэдс=ℓ Б/τ.
Основное отличие принципа действия ОЭДС от других близких по принципам измерения скорости, например от корреляционно-экстремальных измерителей скорости [2], заключается в том, что оценивается не вся совокупность сигналов на выходах обоих каналов ОЭДС, а лишь отдельные характерные импульсы, имеющие достаточно большие амплитуды отраженных импульсов.
Известно устройство для измерения расстояния НТС как составная часть системы наземной навигации, в котором при измерении пройденного расстояния комплексируются механический и два доплеровских датчика скорости [3]. Причем МДС используется при малых скоростях движения НТС, когда ДДС дают большую погрешность при измерении скорости.
Наиболее близким по технической сущности изобретением (прототипом) является устройство для измерения расстояния, пройденного автомобилем [4], которое осуществляет коррекцию масштабного коэффициента механического датчика пути на основе анализа знака и величины ускорения автомобиля, определяемого датчиком линейных ускорений (акселерометром).
Данное устройство для измерения расстояния, пройденного автомобилем, содержит закрепленный на колесе датчик пути, счетчик пути, выполненный в виде генератора импульсов, схемы сравнения, программного переключателя, счетчика импульсов и индикатора, выход датчика пути соединен через генератор импульсов с первым входом схемы сравнения, выход программного переключателя соединен со вторым входом схемы сравнения, выход которой через счетчик импульсов соединен с входом индикатора, блок анализа условий движения, состоящий из датчика линейных ускорений, элемента И-НЕ, первого и второго диодов, n-первых пороговых устройств, n-вторых пороговых устройств, задатчика сигналов, причем выход датчика пути соединен через генератор импульсов с первым входом схемы сравнения, выход программного переключателя соединен со вторым входом схемы сравнения, выход которой через счетчик соединен с входом индикатора, выход датчика линейных ускорений одновременно соединен через элемент И-НЕ, первый прямо включенный диод и второй обратно включенный диод, соответственно, с первым входом программного переключателя, первыми входами n-первых пороговых устройств и первыми входами n-вторых пороговых устройств, n-вторые входы которых соединены с n-выходами задатчиков сигналов, выход n-первых и второго пороговых устройств соединены соответственно со вторыми и третьими n-входами программного переключателя.
Признаками данного устройства, совпадающими с существенными признаками заявляемого устройства, являются: закрепленный на колесе датчик пути/скорости, генератор импульсов и счетчик импульсов.
Недостатком данного устройства является следующее. Из физики известно, что датчик линейных ускорений (акселерометр), входящий в блок анализа условий движения, измеряет кажущееся ускорение [5]. Так как данный датчик расположен на шасси автомобиля, то на его ось чувствительности будет проектироваться не только ускорение в направлении движения автомобиля, но и ускорение силы тяжести в случае неравномерного распределения масс на передние и задние рессоры, что практически всегда имеет место (разное количество пассажиров на переднем и заднем сиденьях, груз в багажнике), а также при покачивании автомобиля во время движения относительно оси, перпендикулярной направлению движения автомобиля. Так, например, если автомобиль стоит, а из-за указанной выше неравномерности распределения масс, угол наклона продольной оси автомобиля α составит всего один градус, то акселерометр покажет ускорение: w=g*sin(α)=9.91*0.017=0.17 мс-2, где g - ускорение силы тяжести. Если бы автомобиль реально двигался с таким постоянным ускорением, то пройденный путь S, например за одну минуту (t=60 c), составил бы: S=0.17*(60)2/2=308 м.
Технической задачей предлагаемого устройства является повышение точности измерения пройденного расстояния.
С этой целью в предлагаемом устройстве в качестве дополнительно измерителя параметров движения НТС используется оптоэлектронный датчик скорости, на который не влияет ускорение силы тяжести. Причем для получения более высокой точности определения пройденного расстояния по сравнению с МДС предлагается использовать «временной» способ их комплексирования в соответствии с разработанным ранее способом определения скорости движения наземного транспортного средства [1].
Сигналы на выходах каналов ОЭДС представляют собой случайную последовательность импульсов различной длительности и амплитуды, так как неоднородности дорожного покрытия, отражающие световой поток от излучателя, разбросаны хаотично. Поэтому для надежной работы ОЭДС в НТС в данном способе предлагается использовать прогнозируемые интервалы времени, вычисляемые с использованием показаний МДС, в которые должны попадать импульсы на выходе второго канала ОЭДС после появления соответствующих импульсов на выходе первого канала ОЭДС. Это позволяет значительно упростить аппаратуру и облегчить обработку результатов измерений за счет исключения импульсов, не попавших в ожидаемый интервал попадания на выходе второго канала ОЭДС.
Указанные прогнозируемые интервалы времени определяются следующим образом. По информации, поступающей в навигационную систему от МДС в результате измерения им скорости движения НТС в предыдущие моменты времени ti, рассчитывается прогнозируемая скорость движения НТС в последующие моменты времени ti+1 с учетом того, что приращение скорости за малые отрезки времени невелико. На основании этих данных определяются временные интервалы, в которые должны попасть импульсы на выходе второго канала ОЭДС от одной и той же неоднородности дорожного покрытия, вслед за импульсами на выходе первого канала. Другими словами, прогнозируется ожидаемое время задержки τож между моментами появления сигналов на выходах первого и второго каналов, которое зависит от скорости движения НТС.
Последовательность ожидаемых задержек времени при поступлении данных импульсов определяется по следующей формуле:
τож i=ℓ Б/VМДС i,
где VМДС i - скорость, определяемая по информации МДС в i-й момент времени.
Так как точное значение времени появления i-го ожидаемого импульса на выходе второго канала ОЭДС неизвестно, то необходимо определить границы временного интервала, в который должен попасть этот импульс Δτож.
Расчеты показывают, что эта величина обратно пропорциональна скорости движения НТС и составляет примерно 30% времени прохождения расстояния, равного базовому расстоянию ℓБ. Увеличение значения временного интервала Δτож нецелесообразно, так как увеличивается вероятность попадания в этот интервал нескольких ложных импульсов, не соответствующих истинному импульсу, который был на выходе первого канала ОЭДС.
Если в данный временной интервал попали несколько сходных по амплитуде импульсов, то данное измерение отбраковывается и процесс измерения повторяется.
Устройство для определения расстояния, пройденного наземным транспортным средством, содержит механический датчик скорости, генератор импульсов G, а также счетчик импульсов СТ и отличается от прототипа тем, что введен триггер Т, выход которого связан с первым входом счетчика импульсов, а второй вход счетчика связан с выходом генератора импульсов, введены также оптоэлектронный датчик скорости, интегратор ИНТ и логическая схема И, связанная своим выходом с первым входом триггера, второй вход которого соединен со вторым выходом оптоэлектронного датчика скорости, первый выход которого подключен ко второму входу схемы И, первый вход которой связан со вторым выходом вычислителя СР, а первый его выход подключен к первому входу оптоэлектронного датчика скорости, на второй и третий входы которого поступает входные сигналы, выход же счетчика связан со вторым входом вычислителя, первый вход которого связан с выходом механического датчика скорости, а третий выход вычислителя связан со входом интегратора.
Структурная схема предлагаемого устройства приведена на фиг.1 и включает следующие элементы: 1 - МДС; 2 - ОЭДС; 3 - логический элемент И; 4 - элемент памяти Т (триггер); 5 - генератор импульсов G; 6 - счетчик импульсов СТ; 7 - вычислительное устройство СР; 8 - интегрирующее устройство ИНТ.
Устройство работает следующим образом: МДС 1 непрерывно измеряет скорость движения НТС Vнтс(t) и результаты измерений с его выхода Vмдс(t) поступают на вход 1 вычислительного устройства 7, которое на основании этих измерений имеет возможность прогнозировать значения скорости в следующие моменты времени.
ОЭДС 2 подключается для начала измерений Vнтс(t) своим первым (по ходу движения НТС) ЧЭ в дискретные моменты времени по команде, поступающей из вычислительного устройства с его выхода 1. В результате этого на выходе 2 ОЭДС появляется сигнал, который поступает на вход 2 триггера 4, устанавливая его в состояние «единицы» и разрешая своим выходом начать производить отсчет импульсов с выхода генератора 5 в счетчике 6 на его входе 2.
Счет импульсов в указанном счетчике будет производиться до тех пор, пока не сработает 2-й вход ОЭДС 2 в момент времени ti+τ. Причем срабатывание указанного входа должно производиться в интервале времени, которое определяется в вычислителе и фиксируется с помощью поступающей с выхода 1 команды. Таким образом, на выходе счетчика 6 будет отсчитано количество импульсов, пропорциональное времени задержки отраженных от одной и той же неоднородности сигналов, принятых первым и вторым входами ОЭДС 2. Полученные значения данного измерителя поступают на вход 2 вычислительного устройства, где обрабатываются и используются в дальнейшем для выработки уточненных значений скорости движения Vоэдс(t) на выходе 2 вычислительного устройства 7. После интегрирования данной скорости интегратором 8 получим пройденное НТС расстояние Sоэдс(t).
Физическая реализация данного устройства может быть выполнена на следующей элементной базе:
- в ОЭДС - оптическая система с объективом «Зенитар» (фокусное расстояние 50 см), фотоприемная матрица «Аэрофон» с частотным диапазоном 0-10000 Гц, интегральные усилители типа К-140-УД1. В качестве микропрожектора, установленного на НТС, - фонари галогенные ФАГ-1;
- для генератора импульсов высокой частоты - интегральные микросхемы (ИМС) К155ТМ2, а для счетчика импульсов - ИМС К155ЛА3;
- для логической схемы И - ИМС К555ЛА3, триггера - ИМС К155ТМ2;
- для вычислительного устройства и интегратора - микропроцессор К1810.
Таким образом, данное устройство обеспечивает повышение точности измерения пройденного НТС пути на основе информации, полученной в результате измерении с помощью МДС и выработки в вычислителе прогнозируемых интервалов времени, которые используются для проведения измерений ОЭДС.
Источники информации:
1. Кутузов С.В., Макаров В.А., Кулешов В.В. Патент 2431847 С1 РФ, МПК G01P 3/50 (2006.01) «Способ определения скорости движения наземного транспортного средства». 2010101941/20. Заяв. 22.01.10. Опубл. 20.10.11. Бюл. №29.
2. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. М.: Сов. радио, 1974. 392 с.
3. Солодов В.И. Системы наземной навигации. - М.: ВА РВСН им. Петра Великого, 1998, 128 с.
4. Епифанов В.В., Мужичек С.М. Патент 2300080 С1 РФ, МПК G01C 22/00 (2006.01) «Способ измерения расстояния, пройденного автомобилем, и устройство для его осуществления». 2005139221/28, 15.12.2005.
5. Командно-измерительные приборы / Б.И. Назаров, В.В. Булатов, Н.П. Ломейко и др. Под общ. ред. Б.И. Назарова. - М.: МО СССР, 1975. 480 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автономного определения расстояния, пройденного наземным транспортным средством | 2021 |
|
RU2768547C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТОМ | 2015 |
|
RU2584794C1 |
| Устройство измерения скорости наземного транспортного средства | 2019 |
|
RU2711539C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства | 2019 |
|
RU2723892C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2552757C1 |
| Способ определения скорости движения наземного транспортного средства | 2018 |
|
RU2680654C1 |
| Способ измерения скорости движения наземного транспортного средства | 2022 |
|
RU2787685C1 |
| Способ определения скорости движения наземного транспорта | 2022 |
|
RU2805016C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2431847C1 |
Изобретение относится к области приборостроения и может найти применение в системах определения пройденного пути наземных транспортных средств. Технический результат - повышение точности по сравнению с системами, где для измерения пройденного пути используется только механический датчик пути. Для достижения данного результата используется комплексирование механического датчика скорости и оптоэлектронного датчика скорости. В процессе движения транспортного средства измеряется время задержки при приеме светочувствительными элементами оптоэлектронного датчика скорости сигналов, отраженных от неоднородностей дорожного покрытия, при освещении их минипрожектором движущегося объекта. При этом оптоэлектронный датчик скорости оценивает не всю совокупность импульсов, поступающих с его чувствительных элементов, а лишь характерные импульсы, выделяемые в прогнозируемые интервалы времени с помощью механического датчика скорости. С этой целью в устройство введены: триггер, логический элемент, генератор, счетчик импульсов, вычислитель и интегрирующее устройство. 1 ил.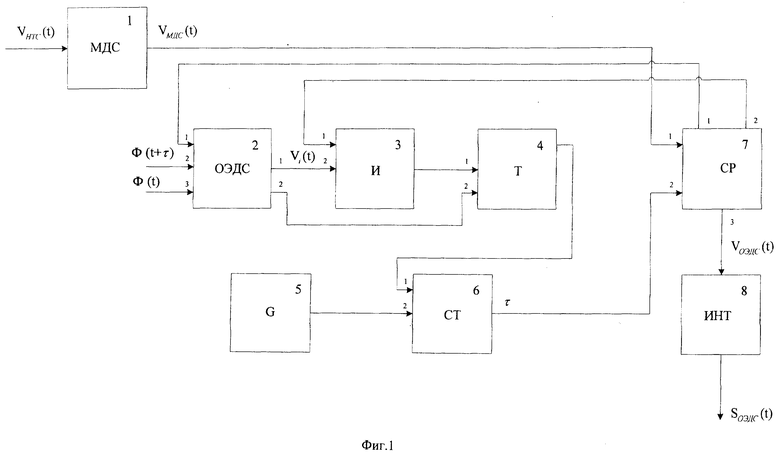
Устройство для определения расстояния, пройденного наземным транспортным средством, содержащее механический датчик скорости, генератор импульсов и счетчик импульсов, отличающееся тем, что введен триггер, выход которого связан с первым входом счетчика импульсов, а второй вход счетчика связан с выходом генератора импульсов, введены также оптоэлектронный датчик скорости, интегратор и логическая схема И, связанная своим выходом с первым входом триггера, второй вход которого соединен со вторым выходом оптоэлектронного датчика скорости, первый выход которого подключен ко второму входу схемы И, первый вход которой связан со вторым выходом вычислителя, а первый его выход подключен к первому входу оптоэлектронного датчика скорости, на второй и третий входы которого поступает входные сигналы, выход счетчика импульсов соединен с вторым входом вычислителя, первый вход которого связан с выходом механического датчика скорости, а третий выход вычислителя связан со входом интегратора.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2171476C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2010 |
|
RU2452652C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ОГРАНИЧЕННОМ ПРОСТРАНСТВЕ | 2007 |
|
RU2368309C2 |
| US 3435335 A, 25.03.1969 | |||
| L-координатное устройство для определения положения или перемещения объекта в пространстве | 1987 |
|
SU1519869A1 |

