Изобретение относится к области наземной навигации и может быть использовано в автономных системах наземной навигации, в которых требуется определение с высокой точностью скорости движения и пройденного расстояния наземным транспортным средством (НТС). Для этого используется комплексирование нескольких измерителей параметров движения.
Известен «Способ определения скорости движения наземного транспортного средства» (патент RU 2552757, приоритет 30.01.2014), где для повышения точности определения скорости НТС используется совместная работа механического и оптоэлектронного датчиков скорости (МДС и ОЭДС соответственно). В этом способе при использовании двух измерителей скорости, основного и дополнительного, осуществляется непрерывное измерение скорости движения объекта основным (МДС) и периодические измерения с высокой точностью дополнительным измерителем (ОЭДС) и при этом используется измерение времени задержки сигнала второго канала относительно первого высокоточным измерителем в определенных границах временных интервалов, предварительно определяемых менее точным измерителем скорости, причем периодичность измерений высокоточным измерителем определяют на основе сравнения уровней сигналов второго канала высокоточного измерителя относительно первого канала и при их расхождении, превышающем пороговый уровень, отключают более высокоточный измеритель.
Недостатком способа является низкая достоверность определения скорости движения НТС в условиях воздействия возмущающих факторов окружающей среды на чувствительные элементы ОЭДС.
Наиболее близким по технической сущности (прототипом) является «Способ автономного определения скорости движения наземного транспортного средства» (патент RU 2680654, приоритет 21.03.2018). В этом способе высокоточный измеритель дополнен еще двумя измерительными каналами, причем каждый канал представляет собой ряд нескольких оптоэлектронных чувствительных элементов, идентифицирующих области неоднородностей. В случае идентификации одной и той же области неоднородностей одновременно двумя, тремя или всеми каналами при наличии пропорциональности отношения значения сигналов всех пар одноименных оптоэлектронных чувствительных элементов соответствующих измерительных каналов, уточняется с разной степенью точности масштабный коэффициент основного измерителя (МДС). В случае идентификации неоднородности только одним каналом высокоточный измеритель переходит в режим одновременной идентификации двух разных областей неоднородностей, находящихся в поле зрения измерительных каналов высокоточного измерителя. После успешной идентификации одной или одновременно двух областей неоднородностей также уточняется масштабный коэффициент основного измерителя. В случае же идентификации только одной неоднородности только одним каналом, либо снижения точности определения масштабного коэффициента основного измерителя ниже заданного уровня, корректировка масштабного коэффициента основного датчика временно блокируется и возобновляется через установленный интервал времени.
Недостатком данного способа является обработка ОЭДС значения отраженного сигнала по уровню, не учитывая при этом пространственных (геометрических) форм отраженного сигнала, тем самым не в полной мере использует потенциал информационной избыточности ОЭДС для повышения точности, достоверности и непрерывности измерения скорости и пройденного пути комплексной навигационной системы. Так, заложенный в прототипе в основу способа обнаружения одной и той же неоднородности, принцип сохранения пропорциональности отношения значения сигналов на выходе всех пар одноименных оптоэлектронных чувствительных элементов приведет к ложному срабатыванию ОЭДС по разным неоднородностям. Это может произойти, если под обоими рядами чувствительных элементов работающей пары каналов ОЭДС будут находиться разные неоднородности но с одинаковой отражающей способностью, по всей длине соответствующего ряда чувствительных элементов.
Задачей изобретения является повышение точности и достоверности измерения скорости движения наземного транспортного средства.
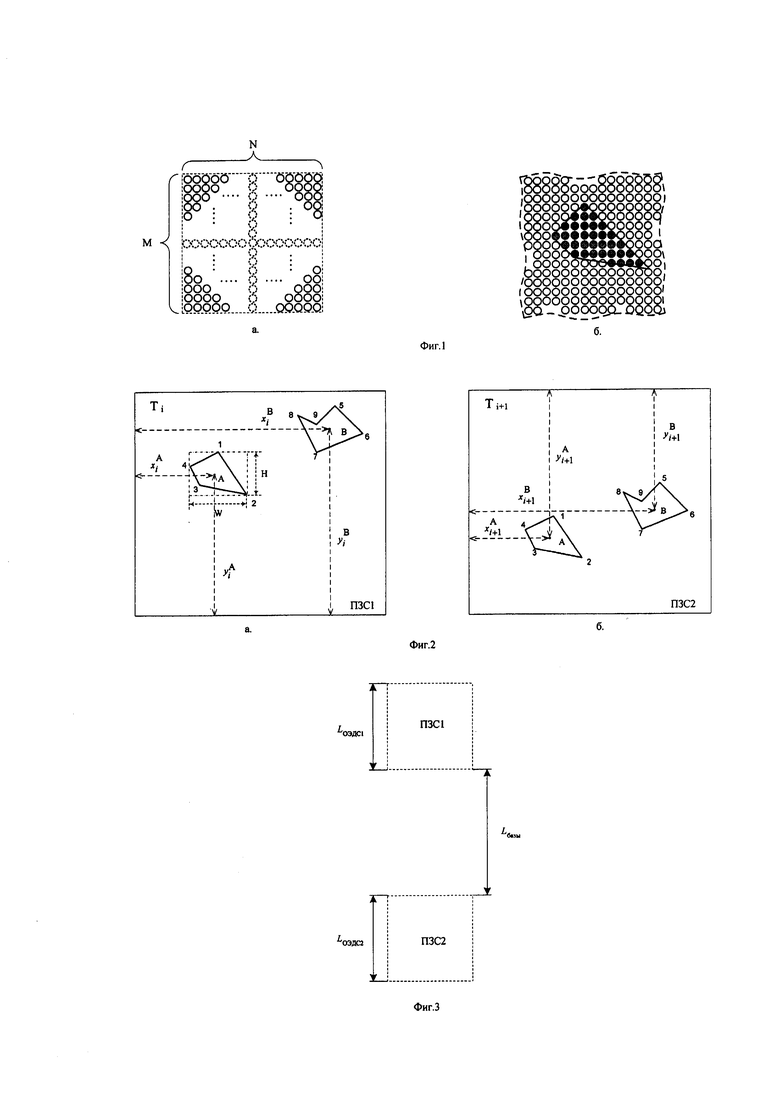
В предлагаемом способе измерения скорости движения наземного транспортного средства, высокоточный дополнительный измеритель скорости (ДИС), в качестве которого может использоваться ОЭДС, состоит из двух каналов, каждый из которых представляет собой прибор с зарядовой связью (ПЗС). Основу ПЗС составляет матрица из М х N чувствительных элементов (фиг. 1а). Ядром чувствительных элементов являются фотодиоды. ПЗС обеспечивает преобразование световой энергии, попадающей на отдельный чувствительный элемент матрицы в электрический аналоговый сигнал на выходе данного элемента, а также обеспечивает усиление аналогового сигнала на выходах чувствительных элементов и преобразование его в цифровой вид.
В отличии от ближайшего аналога (прототипа) в предлагаемом способе одним каналом ДИС являются все входящие в матрицу ПЗС чувствительные элементы (а не один ряд чувствительных элементов как в прототипе), что позволяет использовать в качестве измерительной информации пространственные формы множества сигналов, получаемых с выходов чувствительных элементов (фиг. 1б). Пространственные формы множества сигналов, по сути являются геометрическими формами (изображениями) неоднородностей, которые находятся в момент измерения ДИС под НТС.
Способ измерения скорости движения НТС реализуется следующим образом.
Основной измеритель скорости (ОИС), в качестве которого может использоваться МДС, непрерывно измеряет скорость движения НТС, а ДИС измеряет скорость движения НТС периодически. Периодичность измерения скорости движения НТС дополнительным измерителем скорости определяется динамически в зависимости от требований по точности измерения скорости движения НТС и текущего значения скорости нарастания ошибки измерения скорости ОИС.
В момент времени Ti производится измерение первым каналом ДИС. На вход первого канала ДИС поступает отраженный от подстилающей поверхности сигнал в видимом диапазоне спектра электромагнитного излучения. С выхода первого канала ДИС снимается сигнал в цифровом виде, являющийся цифровым изображением подстилающей поверхности, находящейся в области видимости первого канала ДИС.
На цифровом изображении полученном с выхода первого канала ДИС идентифицируются области в виде отдельных цифровых изображений неоднородностей (фиг. 2а).
Идентификация областей неоднородностей, для каждого из двух каналов, представляет следующую последовательность операций:
1. Сегментация цифрового изображения, полученного с выхода первого канала ДИС, на цифровые изображения неоднородностей.
2. Формирование аналитического описания цифровых изображений неоднородностей.
На этапе сегментации цифрового изображения для обеспечения возможности формирования аналитического описания проводится отбор только таких цифровых изображений неоднородностей, которые имеют замкнутые границы.
На этапе аналитического описания для каждого цифрового изображения неоднородности определяется его площадь S, как число сформировавших его чувствительных элементов (пикселов); размеры сторон четырехугольника (W - ширина, Н - высота), описанного вокруг цифрового изображения неоднородности (фиг. 2а) и координаты центра области каждой неоднородности в связанной с матрицей ПЗС системе координат, начало которой находится в левом верхнем углу матрицы ПЗС, с использованием следующих выражений:
где i, j - абсцисса и ордината положения пиксела, S - площадь цифрового изображения неоднородности, hij - параметр, который равен единице, если пиксел принадлежит цифровому изображению неоднородности, и равен нулю, если пиксел не принадлежит ему, k - количество цифровых изображений неоднородностей.
Этап формирования аналитического описания неоднородностей, обнаруженных в момент времени Ti первым каналом ДИС, заканчивается внесением в информационный массив данных о времени обнаружения неоднородностей, номере соответствующей неоднородности и ее характеристиках, таких как площадь, размеры сторон четырехугольника, описанного вокруг изображения неоднородности, и координаты центра области неоднородности.
Прогноз времени  начала измерения вторым каналом ДИС основывается на значении скорости измеряемой основным измерителем скорости и рассчитывается по следующей формуле:
начала измерения вторым каналом ДИС основывается на значении скорости измеряемой основным измерителем скорости и рассчитывается по следующей формуле:
где Lбазы - длина базы ДИС (фиг. 3), т.е. расстояние между ПЗС матрицами первого и второго каналов ДИС; VМДС - текущая скорость НТС, измеренная МДС.
В момент времени  начинает производиться измерение вторым каналом ДИС. На вход второго канала ДИС поступает отраженный от подстилающей поверхности сигнал в видимом диапазоне спектра электромагнитного излучения. С выхода второго канала ДИС, снимается сигнал в цифровом виде, являющийся цифровым изображением подстилающей поверхности (фиг.2б), находящейся в области видимости первого канала ДИС.
начинает производиться измерение вторым каналом ДИС. На вход второго канала ДИС поступает отраженный от подстилающей поверхности сигнал в видимом диапазоне спектра электромагнитного излучения. С выхода второго канала ДИС, снимается сигнал в цифровом виде, являющийся цифровым изображением подстилающей поверхности (фиг.2б), находящейся в области видимости первого канала ДИС.
После формирования аналитического описания цифровых изображений неоднородностей, находящихся в области видимости второго канала ДИС, происходит фиксация времени Ti+1 окончания измерения вторым каналом ДИС и поиск в информационном массиве на момент времени Ti тех же областей неоднородностей дорожного покрытия, которые были идентифицированы первым каналом ДИС. Поиск реализуется по таким параметрам, как размеры сторон четырехугольника (W - ширина, Н - высота), описанного вокруг цифрового изображения неоднородности и площадь соответствующей неоднородности
Для найденных, как первым так и вторым каналом ДИС одних и тех же неоднородностей определяется расстояние Lk, пройденное НТЗ с момента Ti до момента Ti+1:

где  - расстояние от центра k-ой неоднородности до края ПЗС матрицы первого канала, обращенного в сторону матрицы ПЗС второго канала ДИС,
- расстояние от центра k-ой неоднородности до края ПЗС матрицы первого канала, обращенного в сторону матрицы ПЗС второго канала ДИС,
 - расстояние от центра k-ой неоднородности до края ПЗС матрицы второго канала, обращенного в сторону матрицы ПЗС первого канала ДИС.
- расстояние от центра k-ой неоднородности до края ПЗС матрицы второго канала, обращенного в сторону матрицы ПЗС первого канала ДИС.
Рассчитанные для каждой идентифицированной неоднородности расстояния, пройденные НТС, сравниваются с динамически рассчитываемым пороговым значением. При превышении порогового значения, рассчитанное для конкретной неоднородности расстояние считается аномальным и отбраковывается. По оставшимся после отбраковки аномальных значений расстояниям за время t=Ti+1-Ti) определяется среднее значение скорости движения НТС:
где Р - количество идентифицированных неоднородностей.
Значение скорости, определенное высокоточным дополнительным измерителем скорости, используется для уточнения масштабного коэффициента менее точного основного измерителя скорости.
Техническим результатом является повышение точности и достоверности измерения скорости наземного транспортного средства.
Технический результат достигается тем, что в предлагаемом способе, по сравнению с прототипом, высокоточный измеритель конструктивно состоит из двух матриц чувствительных элементов, каждая из которых образует свой измерительный канал. В каждом измерительном канале ДИС обрабатываются не только уровни цифровых сигналов на выходах чувствительных элементов матриц ПЗС, но и пространственные формы множества таких сигналов, что позволяет более полно использовать измерительную информацию, содержащуюся в цифровом сигнале.
Таким образом заявлен способ измерения скорости движения наземного транспортного средства, заключающийся в том, что непрерывно используется ОИС и осуществляется периодическое измерение с высокой точностью несколькими каналами ДИС, при этом на основе данных о скорости от ОИС рассчитывается как периодичность включения ДИС, так и временной интервал между измерениями первого и второго измерительного канала ДИС, особенностью является то, что применяют ДИС, состоящий из двух измерительных каналов, каждый из которых включает матрицу чувствительных элементов; при определении скорости движения дополнительным измерителем скорости осуществляют идентификацию областей неоднородностей, сначала сегментируя цифровое изображение подстилающей поверхности, находящейся в поле видимости матрицы чувствительных элементов текущего канала ДИС на цифровые изображения неоднородностей (ЦИН), имеющих замкнутые границы, а затем формируя аналитическое описание ЦИН с определением их площади по ширине и высоте прямоугольника, описанного вокруг ЦИН и координат центра каждого ЦИН; после идентификации областей неоднородностей на двух каналах ДИС, осуществляют поиск одних и тех же областей неоднородностей идентифицированных первым и вторым каналом и используют параметры цифровых изображений всех найденных в один момент времени неоднородностей для уточнения масштабного коэффициента основного измерителя скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения скорости движения наземного транспорта | 2022 |
|
RU2805016C1 |
| Способ определения скорости движения наземного транспортного средства | 2018 |
|
RU2680654C1 |
| Устройство измерения скорости наземного транспортного средства | 2019 |
|
RU2711539C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2552757C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТОМ | 2015 |
|
RU2584794C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2549607C1 |
| Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства | 2019 |
|
RU2723892C1 |
| Устройство для автономного определения расстояния, пройденного наземным транспортным средством | 2021 |
|
RU2768547C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2431847C1 |
Изобретение относится к области наземной навигации и может быть использовано в автономных системах наземной навигации. Способ измерения скорости движения наземного транспортного средства заключается в том, что непрерывно используется основной измеритель скорости (ОИС) и осуществляется периодическое измерение с высокой точностью несколькими каналами дополнительного измерителя скорости (ДИС), при этом на основе данных о скорости от ОИС рассчитывается как периодичность включения ДИС, так и временной интервал между измерениями первого и второго измерительного канала ДИС. Дополнительно применяют ДИС, состоящий из двух измерительных каналов, каждый из которых включает матрицу чувствительных элементов; при определении скорости движения дополнительным измерителем скорости осуществляют идентификацию областей неоднородностей, сначала сегментируя цифровое изображение подстилающей поверхности, находящейся в поле видимости матрицы чувствительных элементов текущего канала ДИС, на цифровые изображения неоднородностей (ЦИН), имеющих замкнутые границы. Затем формируя аналитическое описание ЦИН с определением их площади по ширине и высоте прямоугольника, описанного вокруг ЦИН и координат центра каждого ЦИН; после идентификации областей неоднородностей на двух каналах ДИС. Далее осуществляют поиск одних и тех же областей неоднородностей, идентифицированных первым и вторым каналом, и используют параметры цифровых изображений всех найденных в один момент времени неоднородностей для уточнения масштабного коэффициента основного измерителя скорости. Технический результат – повышение точности и достоверности измерения скорости движения наземного транспортного средства. 3 ил.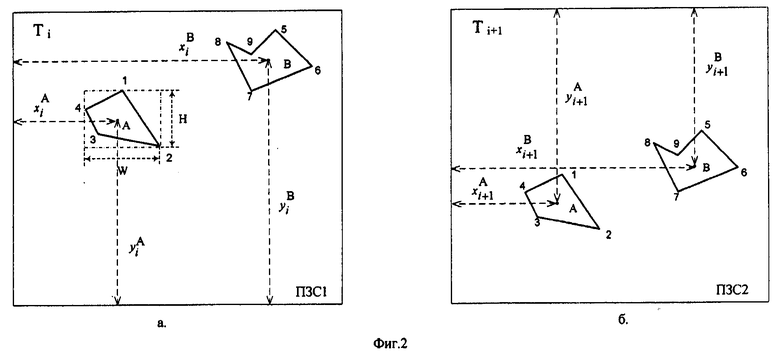
Способ измерения скорости движения наземного транспортного средства, заключающийся в том, что непрерывно используется основной измеритель скорости (ОИС) и осуществляется периодическое измерение с высокой точностью несколькими каналами дополнительного измерителя скорости (ДИС), при этом на основе данных о скорости от ОИС рассчитывается как периодичность включения ДИС, так и временной интервал между измерениями первого и второго измерительного канала ДИС, отличающийся тем, что применяют ДИС, состоящий из двух измерительных каналов, каждый из которых включает матрицу чувствительных элементов; при определении скорости движения дополнительным измерителем скорости осуществляют идентификацию областей неоднородностей, сначала сегментируя цифровое изображение подстилающей поверхности, находящейся в поле видимости матрицы чувствительных элементов текущего канала ДИС, на цифровые изображения неоднородностей (ЦИН), имеющих замкнутые границы, а затем формируя аналитическое описание ЦИН с определением их площади по ширине и высоте прямоугольника, описанного вокруг ЦИН и координат центра каждого ЦИН; после идентификации областей неоднородностей на двух каналах ДИС осуществляют поиск одних и тех же областей неоднородностей, идентифицированных первым и вторым каналом, и используют параметры цифровых изображений всех найденных в один момент времени неоднородностей для уточнения масштабного коэффициента основного измерителя скорости.
| Способ определения скорости движения наземного транспортного средства | 2018 |
|
RU2680654C1 |
| Способ исключения аномальных результатов измерений скорости в автономной системе навигации наземного транспортного средства | 2019 |
|
RU2723892C1 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| US 9707966 B2, 18.07.2017 | |||
| US 9523984 B1, 20.12.2016. | |||

