ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области определения абсолютного положения выемочного комбайна, в частности, к способу определения абсолютного положения шнекового комбайна, а в общем смысле - к области автоматизации горнодобывающего оборудования.
СУЩЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В Китае огромные масштабы добычи и потребления угля. Основным инструментом добычи угля является выемочный комбайн. Работы в забое обычно ведутся вручную и характеризуются высокой трудоемкостью, низкой эффективностью, крайне неблагоприятными и опасными условиями труда. Следовательно, актуальность представляет автоматизация горнодобывающего оборудования. Первостепенная задача в рамках автоматизации работы забоя - решение проблемы определения положения горнодобывающего оборудования. Однако сложные условия на многих шахтах исключают применение большинства распространенных способов позиционирования с соблюдением требования по точности, при этом позиционирование на некоторых участках, например, непосредственно под шахтой и вовсе не представляется возможным. В настоящее время наиболее часто применяются способ подсчета передач, инфракрасное излучение, инерциальная навигация и т.д. Однако многие из этих способов предполагают определение только относительного положения и не предназначены для определения абсолютного положения комбайна в системе координат шахты. Точность таких способов сравнительно низкая и они не могут применяться для автоматизации работы забоя.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Техническая задача
[0003] Задачей настоящего изобретения является сгладить недостатки существующего уровня техники и предложить способ определения абсолютного положения комбайна для получения шестистепенных параметров позиционирования комбайна в абсолютной системе координат шахты. Этот способ эффективен при работе в режиме реального времени и может применяться для обустройства автоматизированного забоя.
Техническое решение
[0004] Для решения поставленной задачи в настоящем изобретении применяется следующее техническое решение:
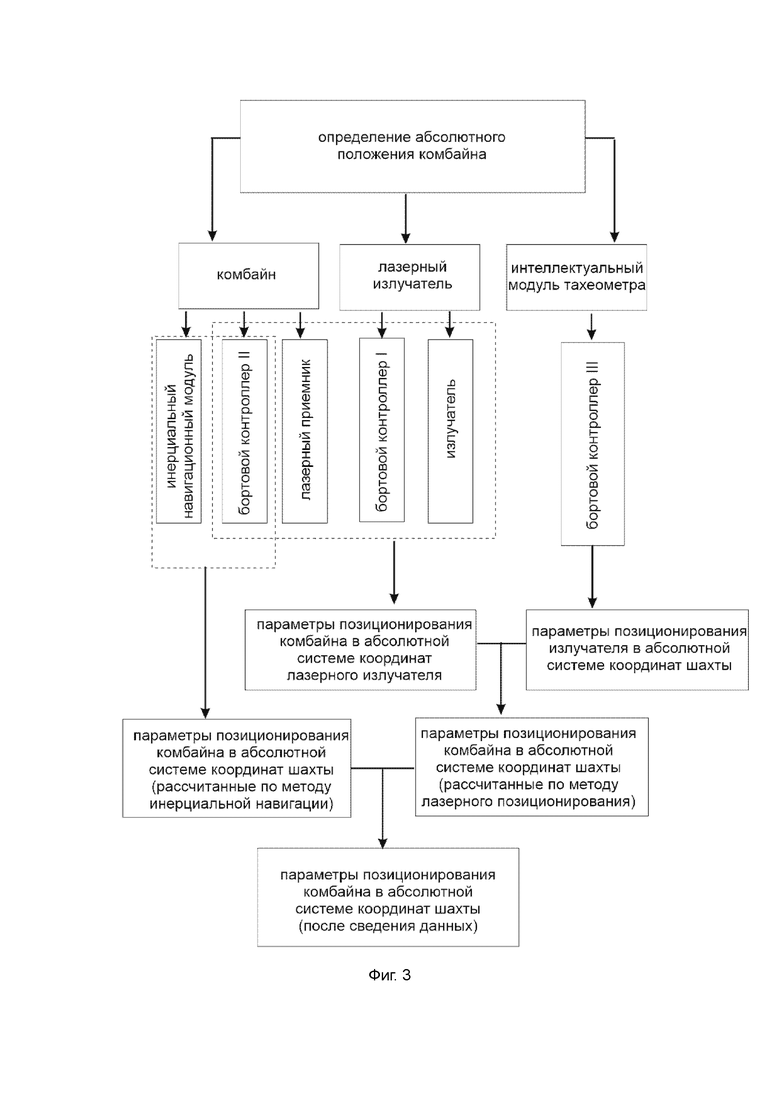
[0005] Предлагается способ определения абсолютного положения комбайна в составе трехкомпонентного горнодобывающего комплекса, состоящего из комбайна, скрепера и гидравлической крепи; способ состоит из определения счисленной точки с помощью бесплатформенного инерциального навигационного модуля, определения положения лазерной точки с помощью лазерного излучателя и интеллектуального модуля тахеометра, затем выполняется асинхронное сведение двух результатов определения с использованием алгоритма оптимальной оценки, например, фильтра Калмана, для получения точного абсолютного положения комбайна.
[0006] В частности, лазерный излучатель состоит из корпуса, шагового двигателя, механизма шагающего движения, кривошипно-коромыслового механизма, серводвигателя, излучателя и бортового контроллера I, при этом шаговой двигатель представлен в огнестойком исполнении, излучатель представляет собой безопасный, огнестойкий излучатель; шаговый двигатель, механизм шагающего движения и кривошипно-коромысловый механизм смонтированы на корпусе, кривошипно-коромысловый механизм приводится в движение шаговым двигателем, а в его верхней части установлены серводвигатель и излучатель; серводвигатель вращает излучатель, который осуществляет сканирование в диапазоне ±45°, бортовой контроллер I после обработки для придания огнестойкости крепится на корпусе и отвечает за управление шаговым двигателем и определение трехмерных координат излучателя в системе координат лазерного излучателя, а также нормализованного вектора лазерного пучка от излучателя.
[0007] В частности, устройство для приема лазерных лучей состоит из трех лазерных приемников и бортового контроллера II, при этом три лазерных приемника закреплены на корпусе комбайна не в линию; все три лазерных приемника способны принимать пучки лазерных лучей, испускаемые излучателем; бортовой контроллер II после обработки для придания огнестойкости крепится на корпусе и связан как с лазерными приемниками, так и бортовым контроллером I; исходя из данных о сигнале, полученном каждым лазерным приемником, трехмерных координатах излучателя в системе координат излучательного устройства и нормализованном векторе пучка лазерных лучей, испускаемого излучателем, выполняется расчет координат каждого лазерного приемника в системе координат излучательного устройства, что позволяет определить шестиступенные параметры позиционирования комбайна в системе координат лазерного излучателя.
[0008] В частности, тахеометр и лазерный излучатель устанавливаются в одном и том же подземном проходе; бортовой контроллер III после обработки для придания огнестойкости крепится на тахеометре и связан как с тахеометром, так и с бортовым контроллером I; призма позиционирования установлена в нужной точке на лазерном излучателе, при этом определение параметров позиционирования лазерного излучателя в абсолютной системе координат шахты осуществляется с использованием тахеометра с учетом параметров позиционирования комбайна в системе координат излучателя; по параметрам позиционирования лазерного излучателя в абсолютной системе координат шахты определяются параметры позиционирования комбайна в абсолютной системе координат шахты, и этот результат считается итоговым результатом лазерного позиционирования.
[0009] В частности, бесплатформенный инерциальный навигационный модуль крепится на комбайне после обработки для придания огнестойкости, при этом бортовой контроллер II связан с бесплатформенным инерциальным навигационным модулем, по навигационным данным бесплатформенного инерциального навигационного модуля бортовой контроллер II вычисляет параметры позиционирования комбайна в абсолютной системе координат шахты, и этот результат считается итоговым результатом инерциального позиционирования.
[0010] В частности, бортовой контроллер I, бортовой контроллер II и бортовой контроллер III связаны друг с другом с помощью ультраширокополосной беспроводной связи, а для бортового контроллера I и бортового контроллера II выполняется часовая синхронизация.
[0011] В частности, в способе в качестве осевого направления используется направление движения комбайна по скреперу, а в качестве радиального направления - направление движения скольжения гидравлической крепи, при этом сам способ включает в себя следующие этапы:
[0012] (a) после запуска системы в исходном состоянии лазерный излучатель перемещают так, чтобы он располагался на одной линии с выработкой, а затем крепят так, чтобы пучок лучей от излучателя сканировал комбайн; бесплатформенный инерциальный навигационный модуль на комбайне запускают в режиме реального времени и определяют с помощью бортового контроллера II параметры позиционирования комбайна в абсолютной системе координат шахты;
[0013] (b) после прекращения работы лазерного излучателя бортовой контроллер I посылает сигнал на бортовой контроллер III, затем бортовой контроллер III приводит в действие тахеометр, после чего параметры позиционирования лазерного излучателя в абсолютной системе координат шахты, полученные с помощью тахеометра, отправляются на бортовой контроллер I;
[0014] (c) бортовой контроллер I запускает шаговый двигатель и серводвигатель так, чтобы излучатель испускал пучки лазерных лучей под разным углом как минимум в трех разных положениях, при этом в режиме реального времени ведется вычисление нормализованного вектора пучка лучей в системе координат излучателя, а также координат лазерного излучателя в системе координат излучателя; при каждом получении сигнала три лазерных приемника с помощью бортового контроллера II отправляют соответствующий идентификационный номер приемника и время приема на бортовой контроллер I; с помощью бортового контроллера I по параметрам позиционирования лазерного излучателя в абсолютной системе координат шахты определяются параметры позиционирования комбайна в абсолютной системе координат шахты, и этот результат считается итоговым результатом лазерного позиционирования;
[0015] (d) бортовой контроллер II обрабатывает данные и сводит результаты инерциального позиционирования и лазерного позиционирования для получения точного абсолютного положения комбайна; данные об абсолютном положении отправляются на интерфейс «человек-машина» для удаленного контроля, а также на контроллер горнодобывающего оборудования для автоматического управления комбайном;
[0016] (e) повтор этапов (c)-(d) вплоть до завершения комбайном цикла осевой выемки;
[0017] (f) комбайн радиально подает материал на скрепер, бортовой контроллер II посылает сигнал на бортовой контроллер I, чтобы лазерный излучатель продвинулся вперед на среднее расстояние скольжения, затем лазерный излучатель закрепляется на месте;
[0018] (g) повтор этапов (b)-(f) для определения параметров позиционирования в режиме реального времени в процессе работы комбайна.
Полезный эффект
[0019] По сравнению с существующим уровнем техники, способ определения абсолютного положения комбайна согласно настоящему изобретению позволяет получить абсолютный шестистепенный параметр позиционирования комбайна при помощи сочетания технологий инерциальной навигации и лазерного сканирования. Преимущества бесплатформенной инерциальной навигации заключаются в простоте расчетов, способности применения в режиме реального времени и привязке к внешнему ориентиру. Однако у бесплатформенной инерциальной навигации имеется накопление погрешности. При этом способ лазерного позиционирования требует привязки к внешнему ориентиру и малоэффективен в режиме реального времени, но не обладает накоплением погрешности. При сочетании внутреннего и внешнего позиционирования используются преимущества обеих технологий, а сам способ подходит для применения в сложных условиях забоя. Все модули системы представлены в надежном исполнении и связаны между собой посредством ультраширокополосной беспроводной связи. Преимущества настоящего изобретения заключаются в высокой точности определения, применимости для работы в режиме реального времени, надежности и экономичности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
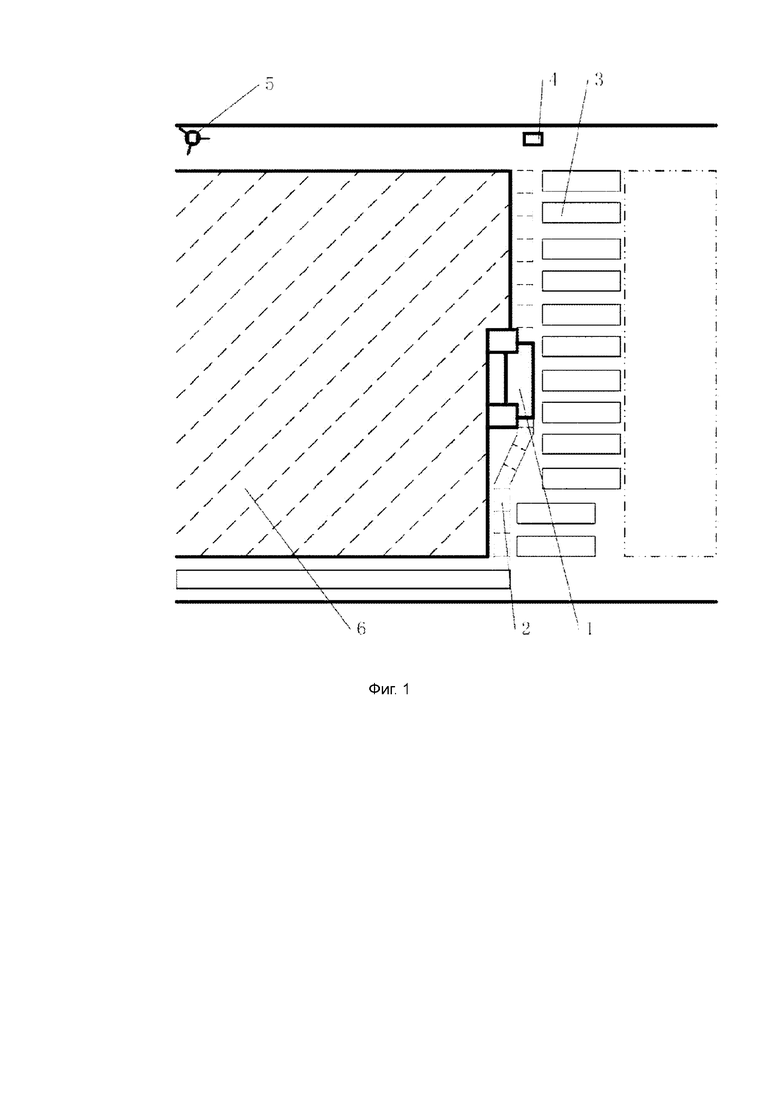
[0020] Фигура 1 - схематическое представление фронта очистного забоя при использовании способа определения абсолютного положения комбайна согласно настоящему изобретению;
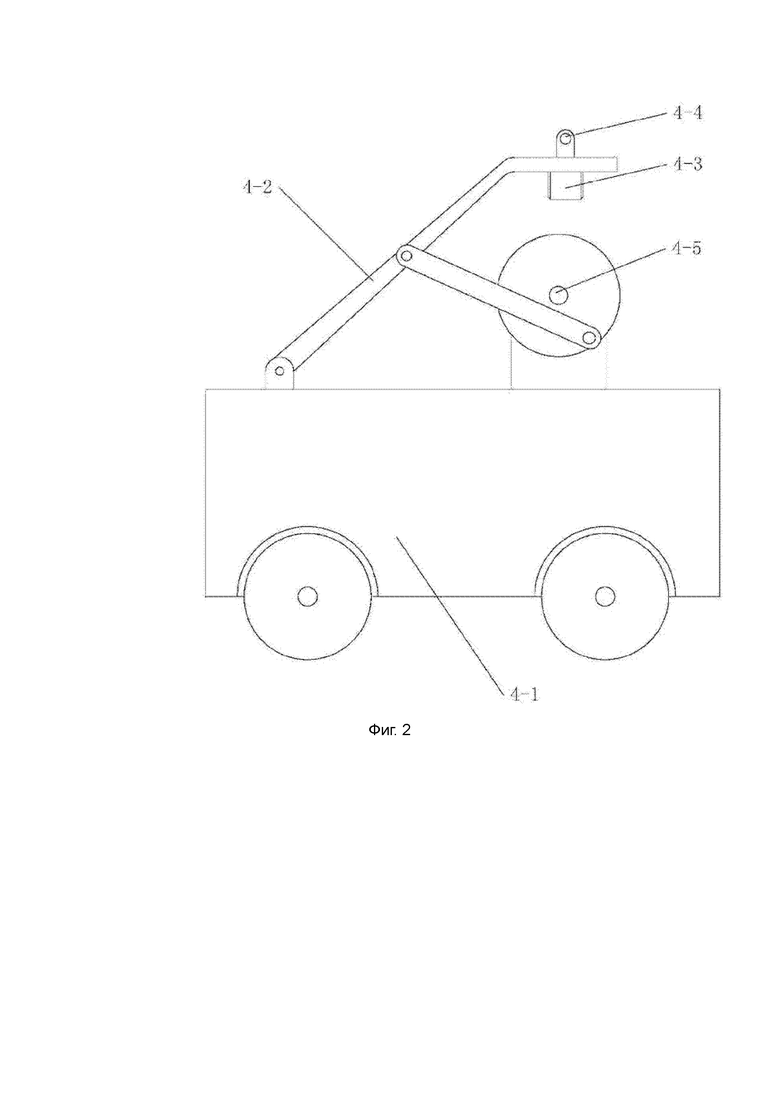
[0021] Фигура 2 - схематическое представление лазерного излучателя согласно настоящему изобретению;
[0022] Фигура 3 - блок-схема системы согласно настоящему изобретению.
[0023] На чертежах: 1, комбайн, 2, скрепер, 3, гидравлическая крепь, 4, лазерный излучатель, 4-1, механизм шагового движения, 4-2, кривошипно-коромысловый механизм, 4-3, серводвигатель, 4-4, лазерный излучатель, 4-5, шаговый двигатель, 5, тахеометр, 6, угольная шахта.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0024] Далее приводится предпочтительных вариантов осуществления настоящего изобретения.
[0025] Способ определения абсолютного положения комбайна показан на Фигуре 1 и Фигуре 2. Способ заключается в определении положения комбайна 1 в забое в составе трехкомпонентного горнодобывающего комплекса, состоящего из комбайна 1, скрепера 2 и гидравлической крепи 3. Способ состоит из определения счисленной точки с помощью бесплатформенного инерциального навигационного модуля, определения положения лазерной точки с помощью лазерного излучателя 4 и интеллектуального модуля тахеометра 5, затем выполняется асинхронное сведение двух результатов определения с использованием алгоритма оптимальной оценки, для получения точного абсолютного положения комбайна 1.
[0026] Лазерный излучатель 4 состоит из корпуса, шагового двигателя 4-5, механизма шагающего движения 4-1, кривошипно-коромыслового механизма 4-2, серводвигателя 4-3, излучателя 4-4 и бортового контроллера I, при этом шаговой двигатель представлен в огнестойком исполнении, излучатель 4-4 представляет собой безопасный, огнестойкий излучатель; шаговый двигатель 4-5, механизм шагающего движения 4-1 и кривошипно-коромысловый механизм 4-2 смонтированы на корпусе, кривошипно-коромысловый механизм 4-2 приводится в движение шаговым двигателем 4-5, а в его верхней части установлены серводвигатель 4-3 и излучатель 4-4; серводвигатель 4-3 вращает излучатель 4-4, который осуществляет сканирование в диапазоне ±45°, бортовой контроллер I после обработки для придания огнестойкости крепится на корпусе и отвечает за управление шаговым двигателем 4-5 и серводвигателем 4-3 и определение трехмерных координат излучателя 4-4 в системе координат лазерного излучателя, а также нормализованного вектора лазерного пучка от излучателя 4-4.
[0027] Устройство для приема лазерных лучей состоит из трех лазерных приемников и бортового контроллера II, при этом три лазерных приемника закреплены на корпусе комбайна 1 не в линию; все три лазерных приемника способны принимать пучки лазерных лучей, испускаемые излучателем 4-4; бортовой контроллер II после обработки для придания огнестойкости крепится на корпусе комбайна 1 и связан как с лазерными приемниками, так и бортовым контроллером I; исходя из данных о сигнале, полученном каждым лазерным приемником, трехмерных координатах излучателя 4-4 в системе координат излучательного устройства и нормализованном векторе пучка лазерных лучей, испускаемого излучателем 4-4, выполняется расчет координат каждого лазерного приемника в системе координат излучательного устройства, что позволяет определить шестиступенные параметры позиционирования комбайна 1 в системе координат лазерного излучателя.
[0028] Тахеометр 5 и лазерный излучатель 4 устанавливаются в одном и том же подземном проходе; бортовой контроллер III после обработки для придания огнестойкости крепится на тахеометре 5 и связан как с тахеометром 5, так и с бортовым контроллером I; призма позиционирования установлена в нужной точке на лазерном излучателе 4, при этом определение параметров позиционирования лазерного излучателя 4 в абсолютной системе координат шахты осуществляется с использованием тахеометра с учетом параметров позиционирования комбайна 1 в системе координат излучателя; по параметрам позиционирования лазерного излучателя 4 в абсолютной системе координат шахты определяются параметры позиционирования комбайна 1 в абсолютной системе координат шахты, и этот результат считается итоговым результатом лазерного позиционирования.
[0029] В частности, бесплатформенный инерциальный навигационный модуль крепится на комбайне 1 после обработки для придания огнестойкости, при этом бортовой контроллер II связан с бесплатформенным инерциальным навигационным модулем, по навигационным данным бесплатформенного инерциального навигационного модуля бортовой контроллер II вычисляет параметры позиционирования комбайна 1 в абсолютной системе координат шахты, и этот результат считается итоговым результатом инерциального позиционирования.
[0030] Бортовой контроллер I, бортовой контроллер II и бортовой контроллер III связаны друг с другом с помощью ультраширокополосной беспроводной связи, а для бортового контроллера I и бортового контроллера II выполняется часовая синхронизация.
[0031] В способе в качестве осевого направления используется направление движения комбайна 1 по скреперу 2, а в качестве радиального направления - направление движения скольжения гидравлической крепи 3, при этом сам способ включает в себя следующие этапы:
[0032] (a) после запуска системы в исходном состоянии лазерный излучатель 4 перемещают так, чтобы он располагался на одной линии с выработкой, а затем крепят так, чтобы пучок лучей от излучателя 4-4 сканировал комбайн 1; бесплатформенный инерциальный навигационный модуль на комбайне 1 запускают в режиме реального времени и определяют с помощью бортового контроллера II параметры позиционирования комбайна 1 в абсолютной системе координат шахты;
[0033] (b) после прекращения работы лазерного излучателя 4 бортовой контроллер I посылает сигнал на бортовой контроллер III, затем бортовой контроллер III приводит в действие тахеометр 5, после чего параметры позиционирования лазерного излучателя в абсолютной системе координат шахты, полученные с помощью тахеометра 5, отправляются на бортовой контроллер I;
[0034] (c) бортовой контроллер I запускает шаговый двигатель 4-5 и серводвигатель 4-3 так, чтобы излучатель 4-4 испускал пучки лазерных лучей под разным углом как минимум в трех разных положениях, при этом в режиме реального времени ведется вычисление нормализованного вектора пучка лучей в системе координат излучателя, а также координат лазерного излучателя 4-4 в системе координат излучателя; при каждом получении сигнала три лазерных приемника с помощью бортового контроллера II отправляют соответствующий идентификационный номер приемника и время приема на бортовой контроллер I; с помощью бортового контроллера I по параметрам позиционирования лазерного излучателя 4-4 в абсолютной системе координат шахты определяются параметры позиционирования комбайна 1 в абсолютной системе координат шахты, и этот результат считается итоговым результатом лазерного позиционирования;
[0035] (d) бортовой контроллер II обрабатывает данные и сводит результаты инерциального позиционирования и лазерного позиционирования для получения точного абсолютного положения комбайна 1; данные об абсолютном положении отправляются на интерфейс «человек-машина» для удаленного контроля, а также на контроллер горнодобывающего оборудования для автоматического управления комбайном 1;
[0036] (e) повтор этапов (c)-(d) вплоть до завершения комбайном 1 цикла осевой выемки;
[0037] (f) комбайн 1 радиально подает материал на скрепер 2, бортовой контроллер II посылает сигнал на бортовой контроллер I, чтобы лазерный излучатель 4 продвинулся вперед на среднее расстояние скольжения, затем лазерный излучатель 4 закрепляется на месте;
[0038] (g) повтор этапов (b)-(f) для определения параметров позиционирования в режиме реального времени в процессе работы комбайна 1.
[0039] Выше приводится предпочтительный вариант осуществления изобретения. В варианты осуществления настоящего изобретения специалисты могут вносить различные изменения и улучшения, а любые представленные здесь описания не могут считаться ограничивающими смысл настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЫСОТЫ АВТОМАТИЧЕСКОЙ ВРУБОВОЙ МАШИНЫ НА ОСНОВЕ ОПРЕДЕЛЕНИЯ СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ ВРУБОВОЙ МАШИНЫ И СПОСОБ ТАКОГО РЕГУЛИРОВАНИЯ | 2018 |
|
RU2707218C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ЭКСКАВАТОРА И СПОСОБ СТРОИТЕЛЬСТВА ПОДЗЕМНОГО ПРОХОДА КРИВОЛИНЕЙНОГО ПРОФИЛЯ | 2018 |
|
RU2699091C1 |
| СИСТЕМА И СПОСОБ НАЧАЛЬНОЙ ВЫСТАВКИ ПО МЕТОДУ ОПТИЧЕСКОГО ПОТОКА ДЛЯ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ УГЛЕДОБЫВАЮЩЕГО КОМБАЙНА | 2018 |
|
RU2734387C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ВРУБОВОЙ МАШИНЫ И СПОСОБ УПРАВЛЕНИЯ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ И ВЗАИМОДЕЙСТВИЯ ДАТЧИКОВ | 2017 |
|
RU2681006C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СИСТЕМА ГЛУШЕНИЯ ВИБРАЦИЙ ДЛЯ ИНТЕГРИРОВАННОГО УСТРОЙСТВА ПОЗИЦИОНИРОВАНИЯ С ИНЕРЦИАЛЬНОЙ НАВИГАЦИЕЙ, СОДЕРЖАЩЕГОСЯ В ПРОХОДЧЕСКОМ КОМБАЙНЕ, И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2020 |
|
RU2752433C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
Изобретение относится к способу и устройству для определения абсолютного положения угледобывающей машины (комбайна в забое) в составе трехкомпонентного горнодобывающего комплекса, состоящего из комбайна, скрепера и гидравлической крепи. Способ, реализующий устройство для определения абсолютного положения угледобывающей машины, состоит из этапов, характеризующих определение счисленной точки с помощью бесплатформенного инерциального навигационного модуля, определение положения лазерной точки с помощью лазерного излучателя и интеллектуального модуля тахеометра, затем выполняется асинхронное сведение двух результатов определения с использованием алгоритма оптимальной оценки для получения точного абсолютного положения комбайна. В настоящем изобретении для асинхронного сведения двух типов навигационных данных применяется алгоритм оптимальной оценки, в частности, фильтр Калмана, что позволяет получить более точные данные об абсолютном положении комбайна. Технический результат - повышение точности, надежности, автоматизации работы комбайна. 2 н. и 3 з.п. ф-лы, 3 ил.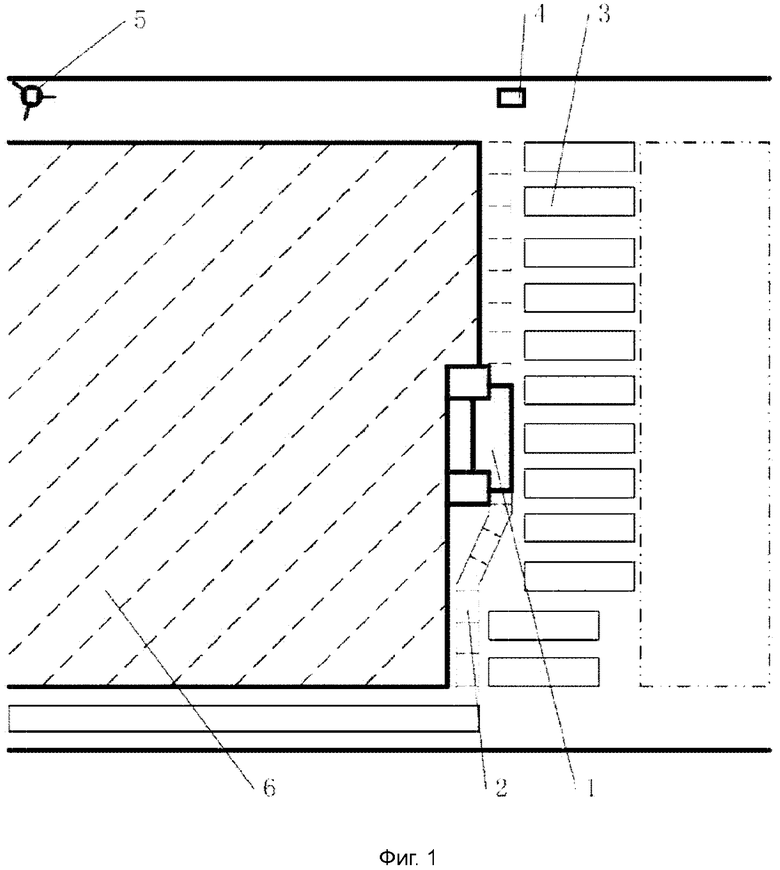
1. Устройство определения абсолютного положения комбайна (1) в забое в составе трехкомпонентного горнодобывающего комплекса, состоящего из комбайна (1), на который крепится бесплатформенный инерциальный навигационный модуль, скрепера (2), гидравлической крепи (3), лазерного излучателя (4), интеллектуального модуля тахеометра (5) и устройства для приема лазерных лучей, при этом лазерный излучатель (4) состоит из корпуса, шагового двигателя (4-5), механизма шагающего движения (4-1), кривошипно-коромыслового механизма (4-2), серводвигателя (4-3), излучателя (4-4) и бортового контроллера I, при этом шаговой двигатель представлен в огнестойком исполнении, излучатель (4-4) представляет собой безопасный, огнестойкий излучатель; шаговый двигатель (4-5), механизм шагающего движения (4-1) и кривошипно-коромысловый механизм (4-2) смонтированы на корпусе, кривошипно-коромысловый механизм (4-2) приводится в движение шаговым двигателем (4-5), а в его верхней части установлены серводвигатель (4-3) и излучатель (4-4); серводвигатель (4-3) вращает излучатель (4-4), который осуществляет сканирование в диапазоне ±45°, бортовой контроллер I после обработки для придания огнестойкости крепится на корпусе и отвечает за управление шаговым двигателем (4-5) и серводвигателем (4-3) и определение трехмерных координат излучателя (4-4) в системе координат лазерного излучателя, а также нормализованного вектора лазерного пучка от излучателя (4-4), устройство для приема лазерных лучей, состоящее из трех лазерных приемников и бортового контроллера II, при этом три лазерных приемника закреплены на корпусе комбайна (1) не в линию; все три лазерных приемника способны принимать пучки лазерных лучей, испускаемые излучателем (4-4); бортовой контроллер II после обработки для придания огнестойкости крепится на корпусе комбайна (1) и связан как с лазерными приемниками, так и бортовым контроллером I; исходя из данных о сигнале, полученном каждым лазерным приемником, трехмерных координатах излучателя (4-4) в системе координат излучательного устройства и нормализованном векторе пучка лазерных лучей, испускаемого излучателем (4-4), выполняется расчет координат каждого лазерного приемника в системе координат излучательного устройства, что позволяет определить шестиступенные параметры позиционирования комбайна (1) в системе координат лазерного излучателя.
2. Устройство определения абсолютного положения комбайна п. 1, отличающееся тем, что тахеометр (5) и лазерный излучатель (4) устанавливаются в одном и том же подземном проходе; бортовой контроллер III после обработки для придания огнестойкости крепится на тахеометре (5) и связан как с тахеометром (5), так и с бортовым контроллером I; призма позиционирования установлена в точке на лазерном излучателе (4), при этом тахеометр, с учетом параметров позиционирования комбайна (1) в системе координат, определяет параметры позиционирования лазерного излучателя (4) в абсолютной системе координат шахты, по которым определяют параметры позиционирования комбайна (1) в абсолютной системе координат шахты, и этот результат считается итоговым результатом лазерного позиционирования.
3. Устройство определения абсолютного положения комбайна п. 1, отличающееся тем, что бесплатформенный инерциальный навигационный модуль крепится на комбайне (1) после обработки для придания огнестойкости, при этом бортовой контроллер II связан с бесплатформенным инерциальным навигационным модулем, по навигационным данным бесплатформенного инерциального навигационного модуля бортовой контроллер II вычисляет параметры позиционирования комбайна (1) в абсолютной системе координат шахты, и этот результат считается итоговым результатом инерциального позиционирования.
4. Устройство определения абсолютного положения комбайна согласно п. 2, отличающееся тем, что бортовой контроллер I, бортовой контроллер II и бортовой контроллер III связаны друг с другом с помощью ультраширокополосной беспроводной связи, а для бортового контроллера I и бортового контроллера II выполняется часовая синхронизация.
5. Способ определения абсолютного положения комбайна по п. 1, отличающийся тем, что в качестве осевого направления используется направление движения комбайна (1) по скреперу (2), а в качестве радиального направления - направление движения скольжения гидравлической крепи (3), при этом способ включает в себя следующие этапы:
(a) после запуска системы в исходном состоянии лазерный излучатель (4) перемещают так, чтобы он располагался на одной линии с выработкой, а затем крепят так, чтобы пучок лучей от излучателя (4-4) сканировал комбайн (1); бесплатформенный инерциальный навигационный модуль на комбайне (1) запускают в режиме реального времени и определяют с помощью бортового контроллера II параметры позиционирования комбайна (1) в абсолютной системе координат шахты;
(b) после прекращения работы лазерного излучателя (4) бортовой контроллер I посылает сигнал на бортовой контроллер III, затем бортовой контроллер III приводит в действие тахеометр (5), после чего параметры позиционирования лазерного излучателя в абсолютной системе координат шахты, полученные с помощью тахеометра (5), отправляются на бортовой контроллер I;
(c) бортовой контроллер I запускает шаговый двигатель (4-5) и серводвигатель (4-3) так, чтобы излучатель (4-4) испускал пучки лазерных лучей под разным углом как минимум в трех разных положениях, при этом в режиме реального времени ведется вычисление нормализованного вектора пучка лучей в системе координат излучателя, а также координат лазерного излучателя (4-4) в системе координат излучателя; при каждом получении сигнала три лазерных приемника с помощью бортового контроллера II отправляют соответствующий идентификационный номер приемника и время приема на бортовой контроллер I; с помощью бортового контроллера I по параметрам позиционирования лазерного излучателя (4-4) в абсолютной системе координат шахты определяются параметры позиционирования комбайна (1) в абсолютной системе координат шахты, и этот результат считается итоговым результатом лазерного позиционирования;
(d) бортовой контроллер II обрабатывает данные и сводит результаты инерциального позиционирования и лазерного позиционирования для получения точного абсолютного положения комбайна (1); данные об абсолютном положении отправляются на интерфейс «человек-машина» для удаленного контроля, а также на контроллер горнодобывающего оборудования для автоматического управления комбайном (1);
(e) повтор этапов (c)-(d) вплоть до завершения комбайном (1) цикла осевой выемки;
(f) комбайн (1) радиально подает материал на скрепер (2), бортовой контроллер II посылает сигнал на бортовой контроллер I, чтобы лазерный излучатель (4) продвинулся вперед на среднее расстояние скольжения, затем лазерный излучатель (4) закрепляется на месте;
(g) повтор этапов (b)-(f) для определения параметров позиционирования в режиме реального времени в процессе работы комбайна (1).
| US 20110213529 A1, 01.09.2011 | |||
| CN 101201631 A, 18.06.2008 | |||
| US 7159672 B2, 09.01.2007 | |||
| US 20140324291 A1, 30.10.2014. |

