Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля развилки дороги одним линейным радиоволновым средством обнаружения (СО).
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Знание силами реагирования направления движения нарушителя имеет большое значение, так как позволяет значительно сузить направление его поиска и тем самым повысить вероятность его обнаружения и задержания [1]. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание. На практике для решения этой задачи широко применяются линейные радиоволновые средства обнаружения, характеризующиеся протяженной зоной обнаружения (ЗО) - от 50 до 200 метров [2, 3].
Одним из наиболее часто встречаемых элементов дорожной сети является развилка дороги (три смежных прямых участка дороги, сходящихся в одной общей точке) [4, 5].
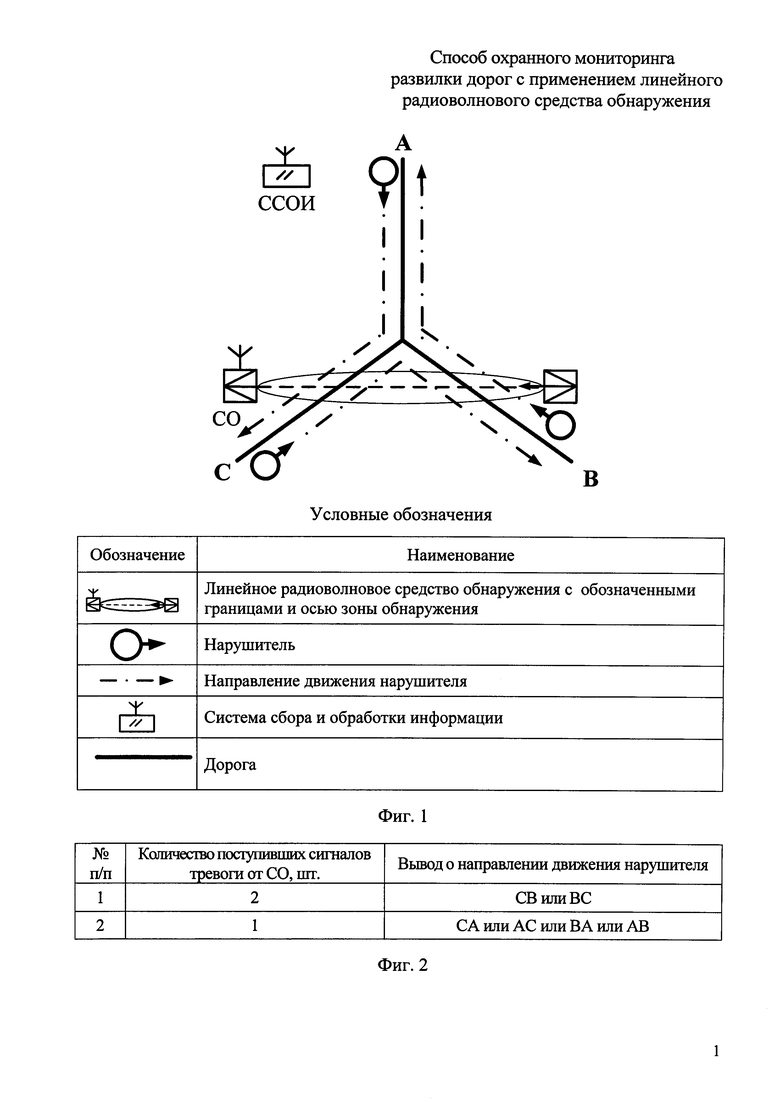
Известен способ охранного мониторинга, заключающийся в развертывании СО на развилке трех дорог по схеме, в которой его ЗО пересекает две дороги; последующем контроле средством развилки дорог; формировании и передаче приемником (ПРМ) средства сигналов тревоги при пересечении нарушителем его ЗО на систему сбора и обработки информации (ССОИ); обеспечении приема сигналов тревоги от ПРМ средства ССОИ и накоплении их в течение установленного времени; применении алгоритма определения направления движения нарушителя по числу поступающих сигналов тревоги от СО (фиг. 1, 2) [2, 3].
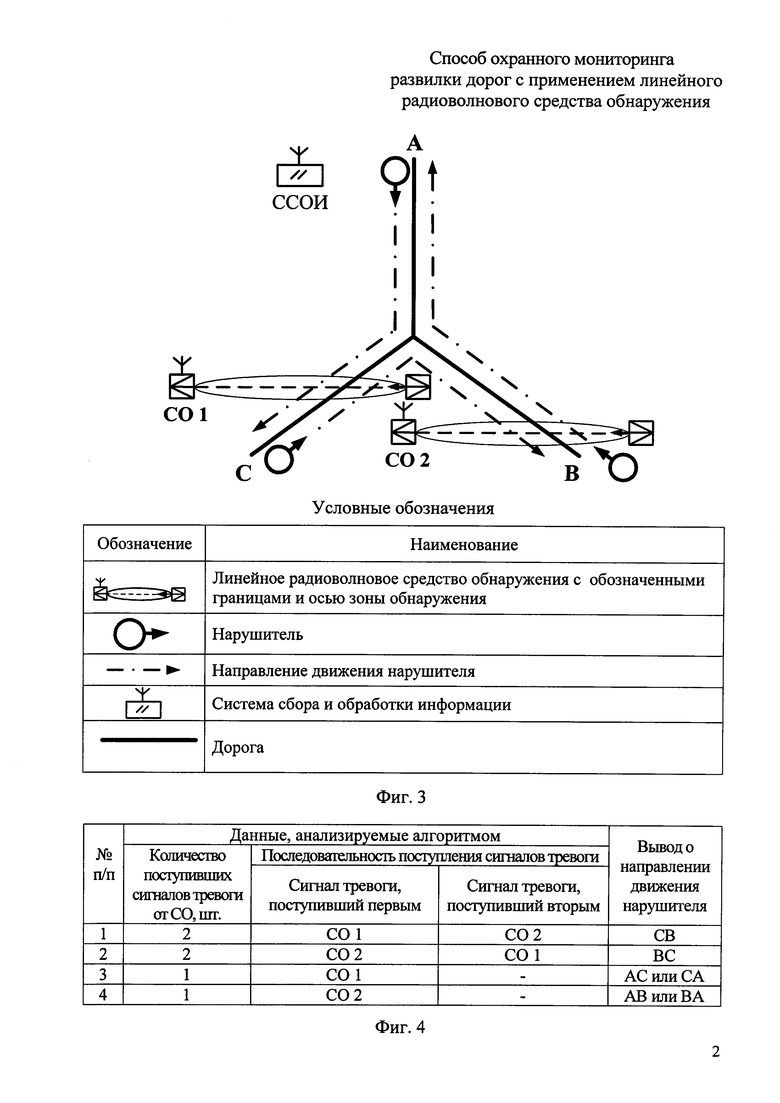
Известен другой способ охранного мониторинга, заключающийся в развертывании на развилке трех дорог двух СО по схеме, в которой ЗО каждого их них пересекает одну из трех дорог; последующем контроле средствами развилки дорог; формировании и передаче приемником (ПРМ) каждого средства сигналов тревоги при пересечении нарушителем его ЗО на систему сбора и обработки информации (ССОИ); обеспечении приема сигналов тревоги от ПРМ средств ССОИ и накоплении их в течение установленного времени; применении алгоритма определения направления движения нарушителя по числу и очередности поступления сигналов тревоги от СО (фиг. 3, 4) [2, 3].
Недостатком первого указанного способа является невысокая точность определения направления движения нарушителя (два из шести направлений движения определяются попарно, а четыре оставшихся - группой) (фиг. 2).
Второй указанный способ обладает более высокой точностью определения направления движения нарушителя (два из шести направлений движения определяются раздельно и четыре направления - попарно), однако для его реализации необходимо развертывание двух СО (фиг. 4).
Целью изобретения является повышение точности определения направлений движения нарушителя, обнаруженного на развилке дороги, с применением только одного СО.
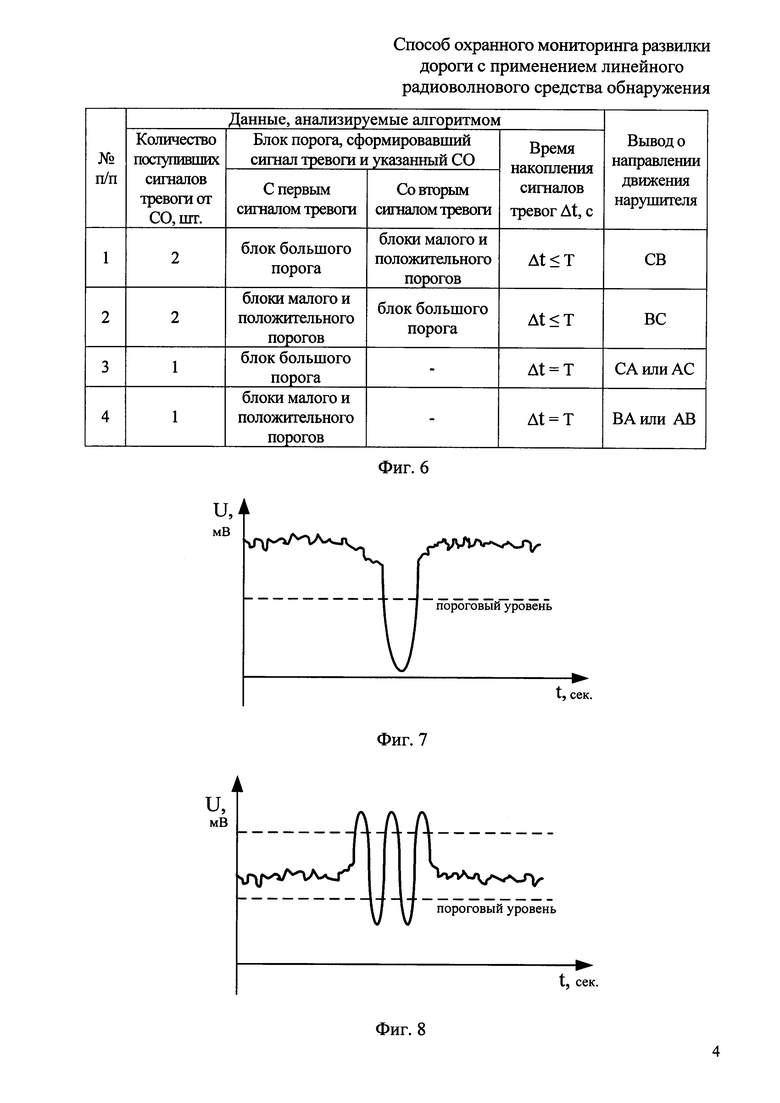
Для достижения поставленной цели разработан способ охранного мониторинга, заключающийся в развертывании СО на развилке трех дорог по схеме, в которой его ЗО пересекает две дороги; обеспечении схемой развертывания средства выделения полезного сигнала с разной глубиной модуляции в ПРМ при пересечении ЗО нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем ЗО вблизи ПРМ или сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции - при пересечении середины ЗО; размещении ПРМ средства на расстоянии не более 5-10 метров от одной дороги, передатчика (ПРД) - на расстоянии, равном половине длины ЗО (±10 метров) от другой дороги; последующем контроле средством развилки дорог; формировании сигнала тревоги блоком большого порога при пересечении ЗО средства нарушителем вблизи ПРМ; формировании сигнала тревоги блоками малого и положительного порога при пересечении нарушителем ЗО посередине; передаче ПРМ средства на ССОИ одного или двух сигналов тревоги с указанием блока порога, сформировавшего его; обеспечении приема сигналов тревоги от ПРМ средства ССОИ и накопления их в течение установленного времени; применении алгоритма определения направления движения нарушителя через развилку трех дорог на основе сравнения данных о блоке порога или комбинации блоков, указанных средством обнаружения вместе с сигналом тревоги, с априорно известной схемой развертывания средства обнаружения на развилке дорог (фиг. 5, 6).
Известно, что принцип действия линейного радиоволнового средства обнаружения основан на регистрации ПРМ изменений сигнала, излучаемого ПРД и принимаемого ПРМ СО, вызванных перемещением объекта обнаружения (нарушителем) через его ЗО. Эти изменения представляют собой промодулированные по амплитуде колебания радиоволн, возникающие при перекрытии ЗО средства нарушителем [6, 7]. Сигнал поступает на вход ПРМ, где происходите его усиление и фильтрация. Детектор, входящий в состав ПРМ, выделяет полезный сигнал. Анализируются амплитудные (глубина модуляции) и временные (форма сигнала) характеристики полезного сигнала и в случае их соответствия заложенной в алгоритме обработки модели «нарушителя» (превышение пороговых уровней) формируется сигнал тревоги. Глубина модуляции и форма полезного сигнала зависят от степени перекрытия геометрических размеров ЗО телом нарушителя. При полном (значительном) перекрытии нарушителем ЗО полезный сигнал представляет собой одиночный отрицательный выброс большой глубины модуляции (фиг. 7). При частичном перекрытии ЗО нарушителем полезный сигнал представляет собой последовательность чередующихся положительных и отрицательных выбросов малой глубины модуляции (фиг. 8). Анализ глубины модуляции полезного сигнала производится на соответствие трем пороговым уровням:
- блок положительного порога срабатывает при положительной модуляции полезного сигнала;
- блок малого порога срабатывает при малой глубине отрицательной модуляции;
- блок большого порога срабатывает при большой глубине отрицательной модуляции.
Сигнал тревоги формируется при срабатывании блока большого порога или блоков малого и положительного порогов (фиг. 9) [8-10].
Также известно, что ЗО средства ограничена областью существенно участвующей в процессе распространения радиоволн и представляет собой эллипсоид вращения между приемником и передатчиком. Размеры этой области определяются диаметром первой зоны Френеля, так как действие остальных смежных зон Френеля высших порядков взаимно компенсируется [7]. Площадь сечения первой зоны Френеля различна по всей длине ЗО: максимальное значение она имеет посередине ЗО (±10 м), а минимальное - вблизи ПРМ (ПРД) СО (5-10 м) (фиг. 5, 10) [6, 11].

где SB' - площадь сечения первой зоны Френеля посередине ЗО (±10 метров), м2;
SC' - площадь сечения первой зоны Френеля вблизи ПРМ, м2.
Диаметр первой зоны Френеля в местах пересечения ЗО средства с дорогой определяется как (фиг. 5):
- посередине ЗО (±10 метров):

- вблизи ПРМ:

где L - длина ЗО СО, м2;
LB' - расстояние от ПРД СО до середины ЗО средства (±10 метров), м;
LC' - расстояние от ПРМ СО до места пересечения ЗО с дорогой, м;
λ - длина волны, м.
В свою очередь, площадь сечения первой зоны Френеля будет равна:
- посередине ЗО (±10 метров):

- вблизи ПРМ:

где DB' - диаметр первой зоны Френеля посередине ЗО (±10 метров), м2;
DC' - диаметр первой зоны Френеля вблизи ПРМ, м2.
При движении через ЗО СО нарушитель перекрывает первую зону Френеля, ПРМ средства регистрирует полезный сигнал [7]. Степень перекрытия определяется отношением площади тела нарушителя (Z) к площади сечения первой зоны Френеля SB' (SC'). В середине ЗО она меньше, вблизи ПРМ больше и примерно равна единице (фиг. 11):

Форма полезного сигнала и глубина его модуляции, при прочих равных условиях, определяется степенью перекрытия первой зоны Френеля СО объектом обнаружения (нарушителем).
Таким образом, при пересечении нарушителем ЗО средства вблизи ПРМ форма полезного сигнала представляет собой одиночный отрицательный выброс большой глубины модуляции, а сигнал тревоги формируется блоком большого порога (фиг. 7, 9).
При пересечении нарушителем ЗО средства посередине форма полезного сигнала представляет собой последовательность чередующихся положительных и отрицательных выбросов малой глубины модуляции, а сигнал тревоги формируется блоками малого и положительного порогов (фиг. 8, 9).
Согласно предлагаемому способу ПРМ средства передает на ССОИ сигнал тревоги с указанием блока (блоков) порога, сформировавшего его (сигнал тревоги, сформирован блоком большого порога или сигнал тревоги сформирован блоками малого и положительного порогов).
В соответствии с предлагаемой схемой развертывания СО, при движении нарушителя через развилку по дороге в направлении СВ или ВС на ССОИ поступают два сигнала тревоги. При движении нарушителя в направлениях АС или СА или АВ или ВА на ССОИ поступает один сигнал тревоги.
На основе сравнения данных о комбинации блоков порога, указанных СО вместе с сигналами тревоги в течение установленного времени накопления сигналов тревог с известной схемой развертывания СО, можно сделать вывод о направлении движения обнаруженного нарушителя:
- первый сигнал тревоги - блок большого порога, второй - блоки малого и положительного порогов, нарушитель движется со стороны ПРМ в сторону ПРД (направление СВ) (фиг. 5, 6);
- первый сигнал тревоги - блоки малого и положительного порогов, второй - блок большого порога, нарушитель движется со стороны ПРД в сторону ПРМ (направление СВ) (фиг. 5, 6).
При поступлении одного сигнала тревоги и достижении временем накопления сигналов тревог своего максимального значения вывод о направлении движения обнаруженного нарушителя делается на основе сравнения данных о блоке порога, указанном СО вместе с сигналом тревоги с известной схемой развертывания СО:
- сигнал тревоги - блок большого порога, нарушитель движется через дорогу вблизи ПРМ (направление СА или АС) (фиг. 5, 6);
- сигнал тревоги - блоки малого и положительного порогов, нарушитель движется через дорогу посередине ЗО (направление ВА или АВ) (фиг. 5, 6).
Для исключения ошибок вывода о направлении движения обнаруженного нарушителя ССОИ накапливает сигналы тревог в течение установленного времени накопления сигналов тревог Δt после поступления первого сигнала. Максимальное значение времени накопления сигналов тревог (Т) определяется исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения с дорогой, с учетом коэффициента запаса 1,2 (фиг. 5, 12):

где Т - максимальное значение времени накопления сигналов тревог, с;
С'О - расстояние между точкой схождения дорог развилки и местом пересечения ЗО средства с дорогой вблизи ПРМ, м;
ОВ' - расстояние между точкой схождения дорог развилки и местом пересечения середины ЗО средства с дорогой, м;
VMIN - минимально возможная скорость движения нарушителя, м/с.
Минимально возможная скорость берется исходя из условий местности. Диапазон скоростей нарушителя на различных участках местности известен и подтвержден на основе экспериментальных исследований (фиг. 12) [4, 12].
Способ включает два этапа: подготовительный и основной.
Подготовительный этап
1. Развертывание на местности системы 1 сбора и обработки информации (фиг. 13).
2. Развертывание на развилке дороги по установленной схеме средства обнаружения, включающего в себя передатчик 2 и приемник, состоящий из усилителя 3, полосового 4 фильтра, детектора 5, блока 6 большого порога, выходного 7 интерфейса, блока 8 малого порога, блока 9 положительного порога (фиг. 5, 13).
3. Расчет и запись в память системы 1 сбора и обработки информации максимального значения времени накопления сигналов тревог (Т) (формула 7).
4. Составление и запись в систему 1 сбора и обработки информации алгоритма вывода (таблица принятия решения) о направлении движения обнаруженного нарушителя.
Основной этап начинается при движении нарушителя через развилку дороги и пересечении им ЗО средства, он включает в себя следующее.
1. Выделение детектором 5 из сигнала, поступившего на вход приемника, усиленного усилителем 3 и отфильтрованного полосовым 4 фильтром полезного сигнала (фиг. 13).
2. Анализ глубины модуляции полезного сигнала, поступившего с детектора 5 на блоки 6 большого порога, 8 малого порога, 9 положительного порога (фиг. 13).
3. Формирование сигнала тревоги блоком 6 большого порога при полезном сигнале в виде одиночного отрицательного выброса большой глубины модуляции; формирование сигнала тревоги блоками 8 малого и 9 положительного порогов при полезном сигнале в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции, в зависимости от места пересечения ЗО нарушителем (фиг. 13).
4. Передача сигнала тревоги с указанием блока (блоков) порога, сформировавшего его выходным 7 интерфейсом на систему 1 сбора и обработки информации (фиг. 13).
5. Прием системой 1 сбора и обработки информации первого сигнала тревоги начало отсчета в ней времени накопления сигналов тревог (Δt) (фиг. 13).
6. Выход нарушителя из ЗО средства, формирование приемником СО дежурного сигнала и передача его на систему 1 сбора и обработки информации (фиг. 13).
7. Возможное второе по счету пересечение нарушителем ЗО СО (направление движения нарушителя СВ или ВС).
8. Выделение детектором 5 из сигнала, поступившего на вход приемника, усиленного усилителем 3 и отфильтрованного полосовым 4 фильтром полезного сигнала (фиг. 13).
9. Анализ глубины модуляции полезного сигнала, поступившего с детектора 5 на блоки 6 большого порога, 8 малого порога, 9 положительного порога (фиг. 13).
10. Формирование второго сигнала тревоги блоками 8 малого и 9 положительного порогов при полезном сигнале в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции; формирование второго сигнала тревоги блоком 6 большого порога при полезном сигнале в виде одиночного отрицательном выброса большой глубины модуляции, в зависимости от места пересечения ЗО нарушителем (фиг. 13).
11. Передача второго сигнала тревоги с указанием блока (блоков) порога, сформировавшего его выходным 7 интерфейсом, на систему 1 сбора и обработки информации (фиг. 13).
12. Прием системой 1 сбора и обработки информации второго сигнала тревоги и окончание отсчета в ней времени накопления сигналов тревог (Δt) (фиг. 13).
13. Выход нарушителя из ЗО СО, формирование приемником СО дежурного сигнала и передача его на систему 1 сбора и обработки информации (фиг. 13).
14. Определение системой 1 сбора и обработки информации направления движения нарушителя через развилку трех дорог на основе сравнения данных о комбинации блоков порога, указанных СО вместе с сигналами тревоги с известной схемой развертывания СО:
- первый сигнал тревоги - блок большого порога, второй - блоки малого и положительного порогов, нарушитель движется со стороны ПРМ в сторону ПРД (направление СВ) (фиг. 5, 6);
- первый сигнал тревоги - блоки малого и положительного порогов, второй - блок большого порога, нарушитель движется со стороны ПРД в сторону ПРМ (направление СВ) (фиг. 5, 6). 13.
15. При поступлении одного сигнала тревоги и достижении временем накопления сигналов тревог (Δt) своего максимального значения (Т), окончание накопления сигналов тревог системой 1 сбора и обработки информации.
16. Определение системой 1 сбора и обработки информации направления движения нарушителя через развилку трех дорог на основе сравнения данных о блоке порога, указанном СО вместе с сигналом тревоги с известной схемой развертывания СО:
- сигнал тревоги - блок большого порога, нарушитель движется через дорогу вблизи ПРМ (направление СА или АС) (фиг. 5, 6);
- сигнал тревоги - блоки малого и положительного порогов, нарушитель движется через дорогу посередине ЗО (направление ВА или АВ) (фиг. 5, 6).
17. Обнуление памяти системы 1 сбора и обработки информации (фиг. 13).
Сущность изобретения поясняется графическими материалами, где представлено на
- фиг. 1 - схема развертывания одного линейного радиоволнового средства обнаружения в известном способе;
- фиг. 2 - алгоритм вывода (таблица принятия решения) о направлении движения нарушителя через развилку дороги в известном способе;
- фиг. 3 - схема развертывания двух линейных радиоволновых средств обнаружения в известном способе;
- фиг. 4 - алгоритм вывода (таблица принятия решения) о направлении движения нарушителя через развилку дороги в известном способе;
- фиг. 5 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе с указанием размеров;
- фиг. 6 - алгоритм вывода (таблица принятия решения) о направлении движения обнаруженного нарушителя;
- фиг. 7 - эпюр полезного сигнала в виде одиночного отрицательного выброса большой глубины модуляции;
- фиг. 8 - эпюр полезного сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции;
- фиг. 9 - таблица соответствия места пересечения зоны обнаружения средства нарушителем, глубины модуляции полезного сигнала и блока формирующего сигнал тревоги;
- фиг. 10 - схема соотношения размеров нарушителя и площади поперечного сечения первой зоны Френеля зоны обнаружения;
- фиг. 11 - таблица типовых размеров зоны обнаружения линейных радиоволновых средств обнаружения и степени ее перекрытия нарушителем;
- фиг. 12 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 13 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в повышении точности определения направлений движения нарушителя, обнаруженного на развилке дороги, с применением только одного СО (два из шести направлений определяются раздельно и четыре направления - попарно).
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков. - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
5. Ганьшин В.Н., Хренов В.С. Таблицы для разбивки круговых и переходных прямых. - К.: 1974. - 432 с.
6. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов. - М.: Горячая - Телеком, 2004. - 367 с.
7. Никитин Н.В., Малемин, С.Г. Применение радиоволновых и комбинированных извещателей с целью повышения обнаруживающей способности и помехозащищенности. Методическое пособие (Р 78.36.022-2013). - М.: НИЦ «Охрана», 2012. - 120 с.
8. Извещатель охранный линейный радиоволновый «Тантал - 200 - 01». Руководство по эксплуатации (ЮСДП.425142.031 РЭ). - Пенза: Юмирс. - 33 с.
9. Извещатель охранный линейный радиоволновый «РМ - 150». Руководство по эксплуатации (ЮСДП.425142.020 РЭ). - Пенза: Юмирс. - 33 с.
10. Извещатель охранный линейный радиоволновый ИО207 - 7/1 «Линар 200». Руководство по эксплуатации (СПНК.425142.002 РЭ). - СпБ: Аргус-Спектр., 2011 - 36 с.
11. Долуханов М.П. Распространение радиоволн: Учебник - М.: Связьиздат, 1960. - 391 с.
12. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.



Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля развилки дороги одним линейным радиоволновым средством обнаружения (СО). Способ заключается в развертывании СО на развилке трех дорог по схеме, в которой его ЗО пересекает две дороги; обеспечении схемой развертывания средства выделения полезного сигнала с разной глубиной модуляции в приемнике (ПРМ) при пересечении ЗО нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем ЗО вблизи ПРМ или сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции - при пересечении середины ЗО; размещении ПРМ средства на расстоянии не более 5-10 метров от одной дороги, передатчика (ПРД) на расстоянии, равном половине длины ЗО (±10 метров) от другой дороги; последующем контроле средством развилки дорог; формировании сигнала тревоги блоком большого порога при пересечении ЗО средства нарушителем вблизи ПРМ; формировании сигнала тревоги блоками малого и положительного порога при пересечении нарушителем ЗО посередине; передаче ПРМ средства на систему сбора и обработки информации (ССОИ) одного или двух сигналов тревоги с указанием блока порога, сформировавшего его; обеспечении приема сигналов тревоги от ПРМ средства ССОИ и накопления их в течение установленного времени; применении алгоритма определения направления движения нарушителя через развилку трех дорог на основе сравнения данных о блоке порога или комбинации блоков, указанных средством обнаружения вместе с сигналом тревоги, с априорно известной схемой развертывания средства обнаружения на развилке дорог. Способ включает подготовительный этап с развертыванием по установленной схеме СО на развилке дороги и основной этап, который начинается с пересечения нарушителем ЗО средства и заканчивается формированием вывода о направлении движения нарушителя. Технический результат заключается в повышении точности определения направлений движения нарушителя, обнаруженного на развилке дороги, с применением только одного СО (два из шести направлений определяются раздельно и четыре направления - попарно). 13 ил.
Способ охранного мониторинга развилки дорог с применением линейного радиоволнового средства обнаружения, заключающийся в развертывании средства обнаружения на развилке трех дорог по схеме, в которой его зона обнаружения пересекает две дороги; последующем контроле средством развилки дорог; формировании и передаче приемником средства сигналов тревоги при пересечении нарушителем его зоны обнаружения на систему сбора и обработки информации; обеспечении приема сигналов тревоги от приемника средства системой сбора и обработки информации и накопления их в течение установленного времени, отличающийся тем, что схемой развертывания средства обеспечивается выделение полезного сигнала с разной глубиной модуляции в приемнике при пересечении зоны обнаружения нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем зоны обнаружения вблизи приемника или сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции - при пересечении середины зоны обнаружения; приемник средства размещается на расстоянии не более 5-10 метров от одной дороги, передатчик - на расстоянии, равном половине длины зоны обнаружения (±10 метров) от другой дороги; формировании сигнала тревоги блоком большого порога при пересечении зоны обнаружения средства нарушителем вблизи приемника; формировании сигнала тревоги блоками малого и положительного порога при пересечении нарушителем зоны обнаружения посередине; приемник средства передает на систему сбора и обработки информации один или два сигнала тревоги с указанием блока порога, сформировавшего его; применяется алгоритм определения направления движения нарушителя через развилку трех дорог на основе сравнения данных о блоке порога или комбинации блоков, указанных средством обнаружения вместе с сигналом тревоги, с априорно известной схемой развертывания средства обнаружения на развилке дорог.
| WO 2006097920 A2, 21.09.2006 | |||
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |

