Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля места пересечения дорог одним линейным радиоволновым средством обнаружения (СО).
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Тактика действий нарушителя при этом определяет, что при движении через типовые элементы дорожной сети (дорожные узлы) он выбирает наикратчайший путь, выводящий с одного рубежа, на другой, лежащий на противоположной стороне - сквозной. Обеспечение сил реагирования информацией о факте появления нарушителя на контролируемой местности с указанием сквозной дороги, по которой он движется, позволяет значительно сузить направление его поиска и повысить вероятность обнаружения и задержания. [1] На практике для решения этой задачи широко применяются линейные радиоволновые средства обнаружения, характеризующиеся протяженной зоной обнаружения (ЗО) - от 50 до 200 метров. [2, 3]
Одним из наиболее часто встречаемых элементов дорожной сети является пересечение дорог, где две дороги сходятся в одну (развилка трех дорог). [4, 5]
Известен способ охранного мониторинга развилки дорог с применением линейного радиоволнового средства обнаружения, позволяющий раздельно определить две сквозные дороги, по которым движется обнаруженный нарушитель. Способ заключается в развертывании СО по схеме, в которой его ЗО пересекает две дороги развилки; обеспечении схемой развертывания средства выделения полезного сигнала с разной глубиной модуляции в приемнике (ПРМ) при пересечении ЗО нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем ЗО вблизи ПРМ и сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции - при пересечении середины ЗО; размещении ПРМ средства на расстоянии не более 5-10 метров от одной дороги, передатчика (ПРД) - на расстоянии, равном половине длины ЗО (± 10 метров) от другой дороги; последующем контроле средством развилки дорог; формировании сигнала тревоги блоком большого порога при пересечении ЗО средства нарушителем вблизи ПРМ; формировании сигнала тревоги блоками малого и положительного порога при пересечении нарушителем ЗО посередине; передаче ПРМ средства на систему сбора и обработки информации (ССОИ) сигнала тревоги с указанием блока порога, сформировавшего его; обеспечении приема сигналов тревоги от ПРМ средства ССОИ и накопления их в течение установленного времени; применении алгоритма определения направления движения нарушителя через развилку трех дорог на основе сравнения данных о блоке порога или комбинации блоков, указанных СО вместе с сигналом тревоги, с априорно известной схемой развертывания СО на развилке дорог.[6]
В то же время, применение известного способа для другого, не менее часто встречающегося элемента дорожной сети - пересечения дорог, где три дороги сходятся в одну, не позволяет раздельно определить друг от друга три сквозных дороги, по которым движется нарушитель.
Как правило, для лица, принимающего решение (ЛИР), не все сквозные дороги одинаково важны. На практике их ранжируют на главную сквозную дорогу и второстепенные сквозные дороги. ЛИР важно знать, что нарушитель движется именно по главной сквозной дороге и достаточно информации о его движении по одной из второстепенных дорог.[1]
Целью изобретения является получение возможности определения движения нарушителя по главной сквозной дороге раздельно от второстепенных сквозных дорог с применением только одного СО на месте пересечения дорог.
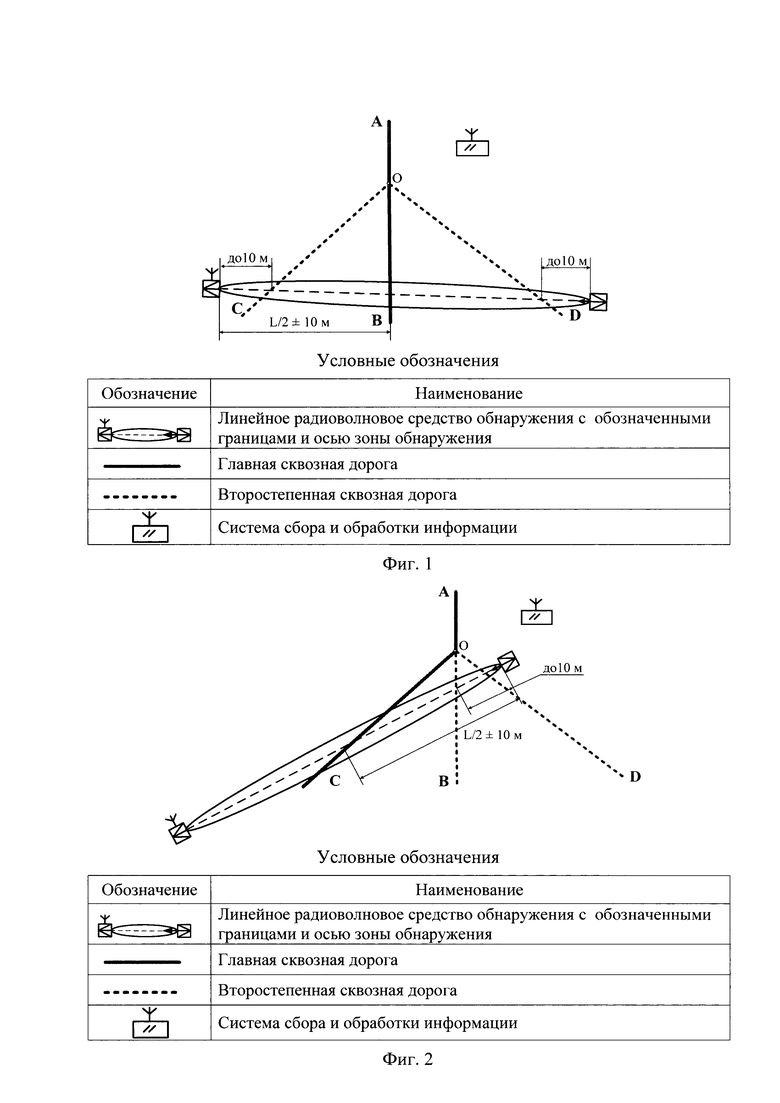
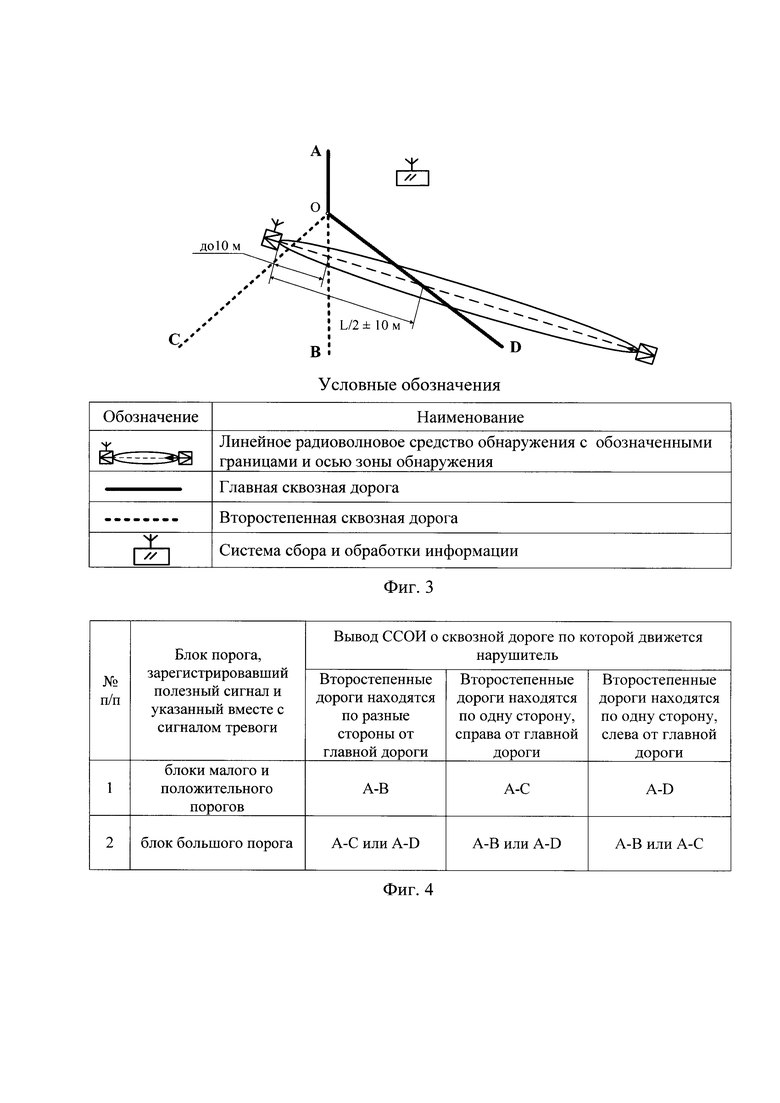
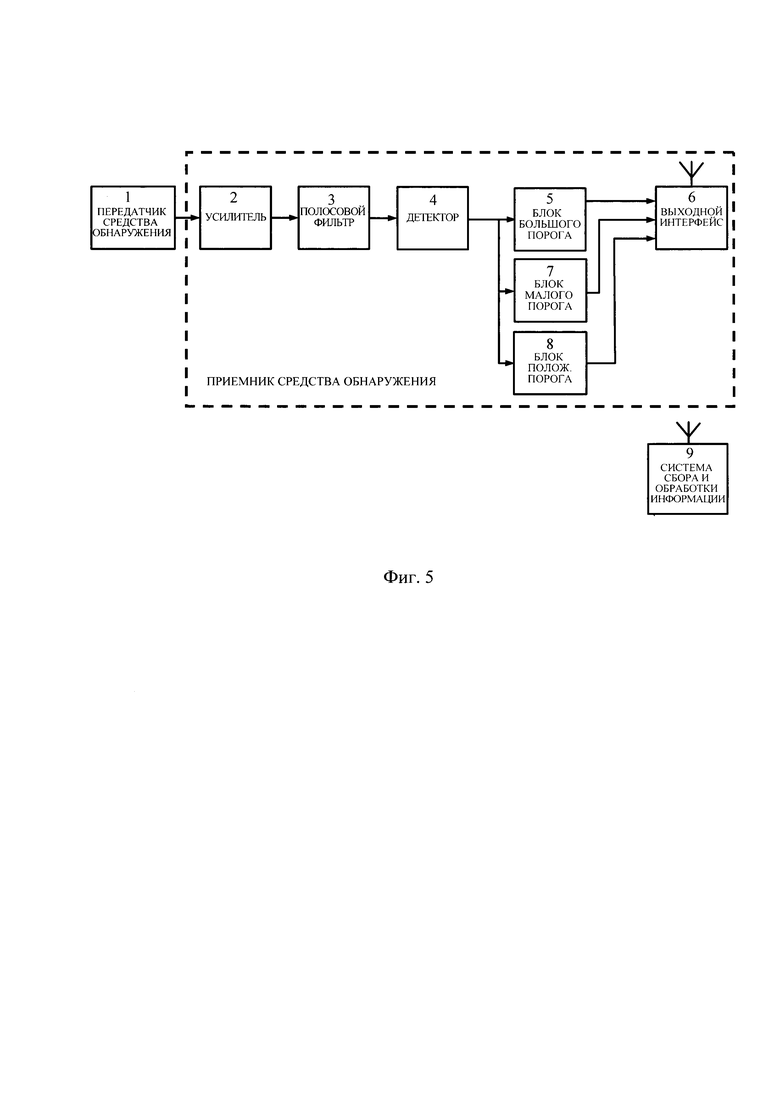
Для достижения поставленной цели разработан способ охранного мониторинга пересечения дорог линейным радиоволновым средством обнаружения, заключающийся в развертывании на нем СО по схеме, обеспечивающей выделение полезного сигнала с разной глубиной и знаком модуляции в ПРМ при пересечении ЗО нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем ЗО вблизи ПРМ (ПРД) или сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении середины ЗО; выборе из трех сходящихся в одну сквозных дорог пересечения главной сквозной дороги, движение нарушителя по которой требуется определить раздельно от двух других второстепенных сквозных дорог; пересечении серединой ЗО средства (± 10 метров) главной сквозной дороги, а ее участками на удалении не более 10 метров от ПРМ (ПРД) -второстепенных сквозных дорог, в зависимости от их местоположения относительно главной: если второстепенные сквозные дороги находятся по разные стороны от главной сквозной дороги, то ЗО пересекает одну из них по участку на удалении не более 10 метров от ПРМ, а другую - на удалении не более 10 метров от ПРД; если второстепенные сквозные дороги находятся по одну сторону от главной сквозной дороги, то зона обнаружения пересекает обе дороги по участку на удалении не более 10 метров от ПРМ или ПРД; регистрации полезного сигнала блоком большого порога при пересечении ЗО средства нарушителем вблизи ПРМ (ПРД); регистрации полезного сигнала блоками малого и положительного порога при пересечении нарушителем ЗО посередине; передаче ПРМ средства на ССОИ сигнала тревоги с указанием блока порога, зарегистрировавшего полезный сигнал; обеспечении приема сигналов тревоги от ПРМ средства ССОИ; применении алгоритм определения движения нарушителя по главной сквозной дороге - по блокам малого и положительного порогов, указанных средством вместе с сигналом тревоги, по одной из второстепенных дорог - по блоку большого порога, указанному с сигналом тревоги (фиг. 1-4).
На этапе развертывания средства из трех сквозных дорог выбирается главная сквозная дорога, движение нарушителя по которой требуется определить раздельно и две второстепенные сквозные дороги, движение по которым требуется определить группой. Эти дороги могут находиться относительно друг друга по трем вариантам: когда второстепенные сквозные дороги находятся по разные стороны от главной сквозной дороги и когда второстепенные сквозные дороги находятся по одну сторону, справа (слева) от главной сквозной дороги (фиг. 1-3). Для всех трех вариантов, ЗО средства всегда должна пересекать главную сквозную дорогу посередине, а второстепенные сквозные дороги или на участке вблизи ПРМ или ПРД:
- в случае, когда второстепенные сквозные дороги находятся по разные стороны от главной сквозной дороги, ЗО средства размещается на удалении от места пересечения дорог на таком расстоянии и ориентируется таким образом, чтобы главная сквозная дорога пересекала ее по середине (± 10 метров), одна из второстепенных сквозных дорог - по участку на удалении не более 10 метров от ПРД, а вторая - по участку на удалении не более 10 метров от ПРМ;
- в случае, когда второстепенные сквозные дороги находятся по одну сторону, справа (слева) от главной сквозной дороги, ЗО средства размещается и ориентируется таким образом, чтобы ее середина (± 10 метров) находилась на удалении от места пересечения дорог и пересекалась главной сквозной дорогой, а ее участок на удалении не более 10 метров от ПРМ (ПРД) находился вблизи места пересечения дорог и пересекался двумя второстепенными сквозными дорогами.
С учетом выбранной схемы развертывания средства в ССОИ применяется алгоритм определяющий, движется ли нарушитель по главной сквозной дороге или по одной из второстепенных сквозных дорог (фиг. 4):
- полезный сигнал зарегистрирован блоками малого и положительного порогов - нарушитель движется по главной сквозной дороге;
- полезный сигнал зарегистрирован блоком большого порога -нарушитель движется по одной из второстепенных сквозных дорог.
Способ включает два этапа: подготовительный и основной. Подготовительный этап:
1. Выбор на месте пересечения дорог, главной сквозной дороги и двух второстепенных сквозных дорог (фиг. 1-3).
2. Развертывание на местности системы 9 сбора и обработки информации (фиг. 5).
3. Развертывание на пересечении дорог средства обнаружения, включающего в себя: передатчик 1 и приемник, состоящий из усилителя 2, полосового 3 фильтра, детектора 4, блока 5 большого порога, выходного 6 интерфейса, блока 7 малого порога, блока 8 положительного порога по установленной схеме (фиг. 5):
- если второстепенные сквозные дороги находятся по разные стороны от главной дороги, то середина ЗО средства пересекает главную сквозную дорогу под прямым углом по участку находящемуся на удалении не более 10 метров от нее, а участки ЗО на удалении не более 10 метров от ПРМ и от ПРД пересекают второстепенные сквозные дороги под острым углом (фиг. 1);
- если второстепенные дороги находятся по одну сторону, справа от главной дороги, то середина ЗО средства пересекает главную сквозную дорогу под острым углом по участку находящемуся на удалении не более 10 метров от нее, а участок ЗО на удалении не более 10 метров от ПРД пересекает второстепенные сквозные дороги: одну под прямым углом, вторую - под острым углом (фиг. 2);
- второстепенные дороги находятся по одну сторону, слева от главной дороги, то середина ЗО средства пересекает главную сквозную дорогу под острым углом по участку находящемуся на удалении не более 10 метров от нее, а участок ЗО на удалении не более 10 метров от ПРМ пересекает второстепенные сквозные дороги: одну под прямым углом, вторую - под острым углом (фиг. 3).
4. Загрузка в память системы 9 сбора и обработки информации алгоритма определения сквозной дороги, по которой движется нарушитель (фиг. 4, 5).
Основной этап начинается при движении нарушителя через пересечение дорог и попадании его в ЗО средства. Он включает в себя:
1. Выделение детектором 4 из сигнала поступившего на вход приемника, усиленного усилителем 2 и отфильтрованного полосовым 3 фильтром полезного сигнала (фиг. 5).
2. Анализ глубины и знака модуляции полезного сигнала, поступившего с детектора 4 на блоки 5 большого порога, 7 малого порога, 8 положительного порога (фиг. 5).
3. При движении нарушителя по главной сквозной дороге, регистрация полезного сигнала блоками 7 малого и 8 положительного порогов (фиг. 4, 5)
4. При движении нарушителя по одной из второстепенных сквозных дорог, регистрация полезного сигнала блоком 5 большого порога (фиг. 4, 5)
5. Передача сигнала тревоги с указанием блока (блоков) порога, зарегистрировавших полезный сигнал выходным 6 интерфейсом на систему 9 сбора и обработки информации (фиг. 5).
6. Прием системой 9 сбора и обработки информации сигнала тревоги (фиг. 5).
7. Выход нарушителя из 30 средства, формирование приемником СО дежурного сигнала и передача его на систему 9 сбора и обработки информации (фиг. 5).
8. Определение системой 9 сбора и обработки информации сквозной дороги, по которой движется нарушитель (фиг. 4, 5):
- в случае, когда второстепенные дороги находятся по разные стороны от главной дороги и полезный сигнал зарегистрирован блоками малого и положительного порогов - нарушитель движется по сквозной дороге А-В (фиг. 1, 4);
- в случае, когда второстепенные дороги по одну сторону, справа от главной дороги и полезный сигнал зарегистрирован блоками малого и положительного порогов - нарушитель движется по сквозной дороге А-С (фиг. 2, 4);
- в случае, когда второстепенные дороги по одну сторону, слева от главной дороги и полезный сигнал зарегистрирован блоками малого и положительного порогов - нарушитель движется по сквозной дороге A-D (фиг. 3, 4).
9. Обнуление памяти системы 9 сбора и обработки информации (фиг. 5).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе охранного мониторинга в случае, когда второстепенные дороги находятся по разные стороны от главной дороги;
- фиг. 2 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе охранного мониторинга в случае, когда второстепенные дороги находятся по одну сторону, справа от главной дороги;
- фиг. 3 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе охранного мониторинга в случае, когда второстепенные дороги находятся по одну сторону, слева от главной дороги;
- фиг. 4 - алгоритм определения движения нарушителя по сквозной дороге в предлагаемом способе;
- фиг. 5 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в получении возможности определения движения нарушителя по главной сквозной дороге раздельно от второстепенных сквозных дорог с применением только одного СО на месте пересечения дорог.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. -135 с.
3. Маршалов, Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. -384 с.
5. Ганыыин, В.Н., Хренов, В.С. Таблицы для разбивки круговых и переходных прямых. - К.: 1974. - 432 с.
6. Пат. 2648210 Российская Федерация, МПК51 G08B 1/00. Способ охранного мониторинга развилки дорог с применением линейного радиоволнового средства обнаружения / С.А. Удот., А.В. Рубаник - №2017105966; заявл. 21.02.17; опубл. 22.03.18, Бюл. №9.
Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях сигнализационного контроля места пересечения дорог одним линейным радиоволновым средством обнаружения (СО). Технический результат заключается в получении возможности определения движения нарушителя по главной сквозной дороге раздельно от второстепенных сквозных дорог с применением только одного СО на месте пересечения дорог. Способ заключается в развертывании на пересечении дорог, где три дороги сходятся в одну СО по схеме, обеспечивающей выделение полезного сигнала с разной глубиной и знаком модуляции при пересечении зоны охраны (ЗО) нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем ЗО вблизи приемника (передатчика) или сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции при пересечении середины ЗО; и соответствующем выборе из трех сходящихся в одну сквозных дорог пересечения главной сквозной дороги, движение нарушителя по которой требуется определить раздельно от двух других второстепенных сквозных дорог; пересечении серединой ЗО средства (±10 метров) главной сквозной дороги, а ее участками на удалении не более 10 метров от приемника (передатчика) - второстепенных сквозных дорог, в зависимости от их местоположения относительно главной. 5 ил.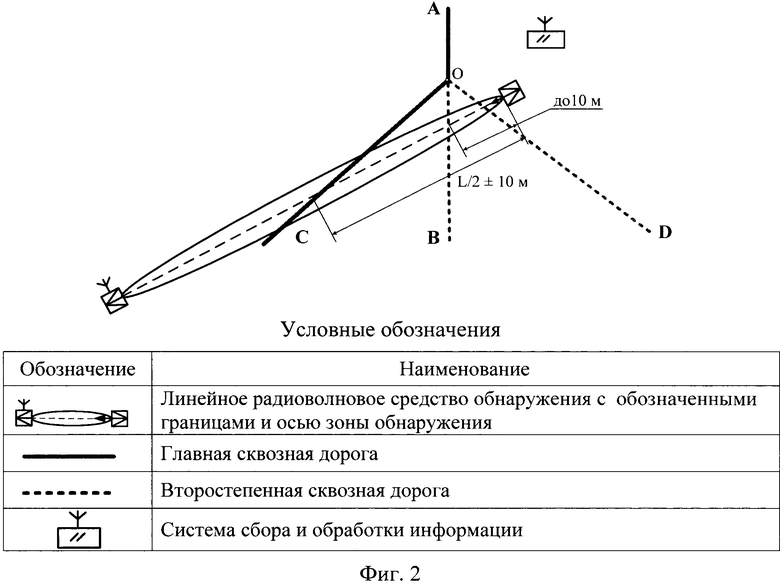
Способ охранного мониторинга пересечения дорог линейным радиоволновым средством обнаружения, заключающийся в развертывании на нем средства обнаружения по схеме, обеспечивающей выделение полезного сигнала с разной глубиной и знаком модуляции в приемнике при пересечении зоны обнаружения нарушителем: сигнала в виде одиночного отрицательного выброса большой глубины модуляции при пересечении нарушителем зоны обнаружения вблизи приемника или передатчика или сигнала в виде последовательности чередующихся положительных и отрицательных выбросов малой глубины модуляции - при пересечении середины зоны обнаружения; регистрации полезного сигнала блоком большого порога при пересечении зоны обнаружения средства нарушителем вблизи приемника или передатчика; регистрации полезного сигнала блоками малого и положительного порога при пересечении нарушителем зоны обнаружения посередине; передаче приемником средства на систему сбора и обработки информации сигнала тревоги с указанием блока порога, зарегистрировавшего полезный сигнал; обеспечении приема сигнала тревоги от приемника средства системой сбора и обработки информации, отличающийся тем, что средство обнаружения разворачивается на пересечении дорог, где три дороги сходятся в одну; из трех сходящихся в одну сквозных дорог пересечения выбирают главную сквозную дорогу, движение нарушителя по которой требуется определить раздельно от двух других второстепенных сквозных дорог; участок зоны обнаружения средства на удалении не более 10 метров от ее середины пересекает главную сквозную дорогу, а ее участки на удалении не более 10 метров от приемника или передатчика - второстепенные сквозные дорог, в зависимости от их местоположения относительно главной: если второстепенные сквозные дороги находятся по разные стороны от главной сквозной дороги, то зона обнаружения пересекает одну из них по участку на удалении не более 10 метров от приемника, а другую - на удалении не более 10 метров от передатчика; если второстепенные сквозные дороги находятся по одну сторону от главной сквозной дороги, то зона обнаружения пересекает обе дороги по участку на удалении не более 10 метров от приемника или передатчика; применяется алгоритм определения движения нарушителя: по главной сквозной дороге - по блокам малого и положительного порогов, указанных средством вместе с сигналом тревоги, по одной из второстепенных дорог - по блоку большого порога, указанному с сигналом тревоги.
| СПОСОБ ОХРАННОГО МОНИТОРИНГА РАЗВИЛКИ ДОРОГ С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2648210C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ТРЕХСТОРОННЕЙ РАЗВИЛКИ ДОРОГ | 2016 |
|
RU2620963C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2612327C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА МЕСТА ПЕРЕСЕЧЕНИЯ ТРЕХ ДОРОГ | 2016 |
|
RU2626742C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА Т - ОБРАЗНОМ ПЕРЕКРЕСТКЕ ДОРОГ | 2015 |
|
RU2599610C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |

