Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения одного линейного радиоволнового средства обнаружения (СО) для сигнализационного контроля дороги на участке, где она имеет изгиб.
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Знание силами реагирования, направления движения нарушителя имеет большое значение, так как позволяет значительно сузить направление его поиска и тем самым повысить вероятность его обнаружения и задержания [1]. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание. На практике для решения этой задачи широко применяются линейные радиоволновые средства обнаружения, характеризующиеся протяженной зоной обнаружения (30) - от 50 до 200 метров [2, 3].
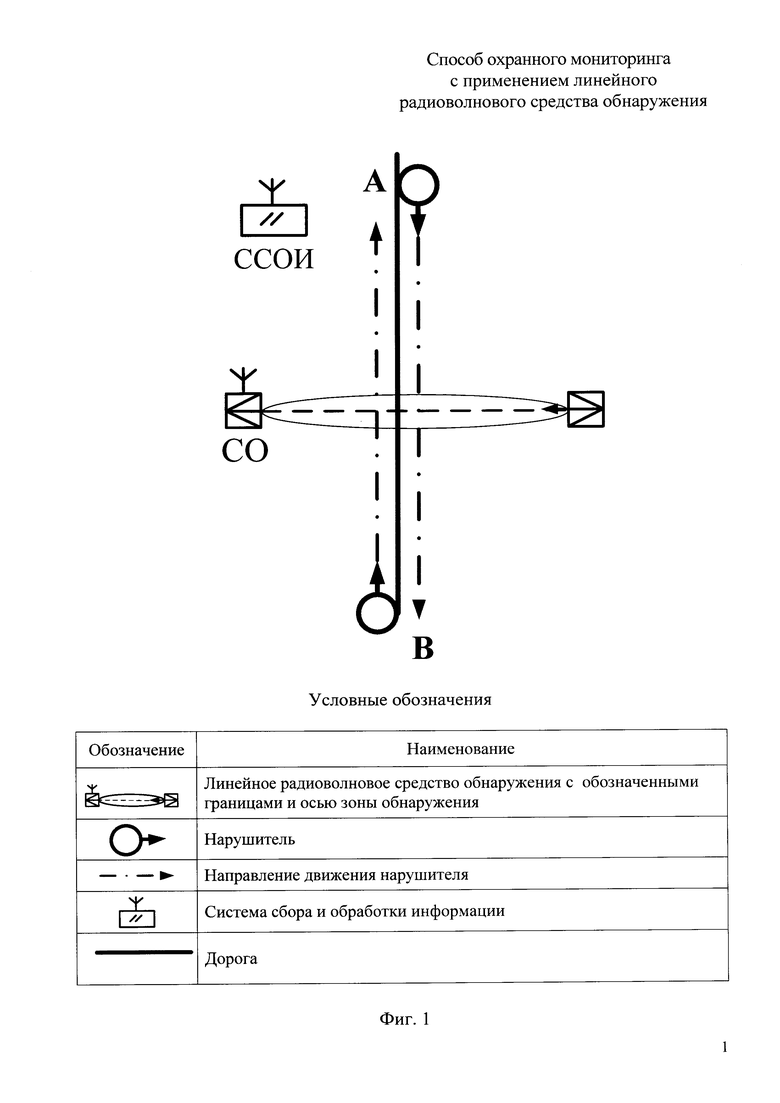
Известен способ охранного мониторинга, заключающийся в контроле дороги одним СО; в обеспечении передачи СО на систему сбора и обработки информации (ССОИ) сигналов тревог при пересечении нарушителем его ЗО (фиг. 1) [2, 3].
Известен другой способ охранного мониторинга, заключающийся в контроле дороги двумя СО; в обеспечении передачи СО на ССОИ сигналов тревог при пересечении нарушителем его ЗО; применении алгоритма определения направления движения обнаруженного нарушителя на основе анализа очередности поступления сигналов тревог от СО (фиг. 2) [2, 3].
Недостатком первого указанного способа является невозможность определения направления движения обнаруженного нарушителя.
Второй указанный способ имеет возможность определения направления движения нарушителя, однако для его реализации необходимо развертывание двух СО.
Целью изобретения является получение возможности определения направления движения нарушителя, обнаруженного на дороге, с применением только одного СО.
Одним из наиболее часто встречаемых элементов дорожной сети является изгиб дороги (дугообразный поворот, искривление дороги - состоящие из двух смежных прямых участков дороги соединенных круговой кривой) [4, 5].
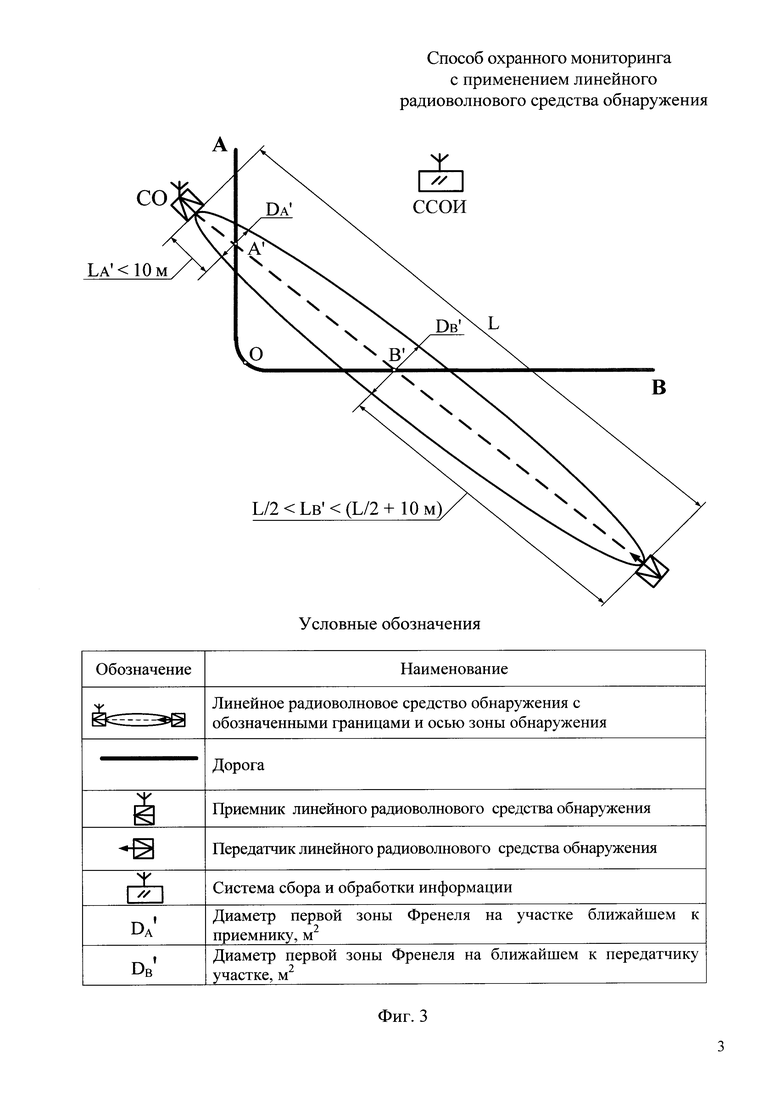
Для достижения поставленной цели разработан способ охранного мониторинга, заключающийся в контроле изгиба дороги одним СО, в котором приемник (ГТРМ) и передатчик (ПРД) разворачиваются с противоположных сторон от точки изгиба дороги так, чтобы зона обнаружения средства пересекала дорогу на двух участках; расстояние от ПРМ до ближайшего к нему участка не превышало 10 метров; расстояние от ПРД до ближайшего к нему участка превышало половину расстояния ПРМ-ПРД не более чем на 10 метров; площади сечения первой зоны Френеля на участках различались: площадь сечения на участке, ближайшем к ПРМ, была не менее чем в два раза меньше площади сечения на ближайшем к ПРД участке; ПРМ дважды формирует сигнал тревоги при движении нарушителя через изгиб дороги; ПРМ СО записывается оба уровня полезных сигналов тревоги в течение всей длительности режимов тревоги; применяется алгоритм, определяющий направление движения нарушителя: со стороны ПРМ в сторону ПРД или со стороны ПРД в сторону ПРМ по значению отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым (больше единицы или меньше единицы); максимальное значение времени накопления сигналов тревог устанавливается исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения с дорогой; ПРМ СО передает системе сбора и обработки информации сигнал о направлении движения нарушителя (фиг. 3, 4).
Известно, что принцип действия линейного радиоволнового средства обнаружения основан на регистрации полезного сигнала, вызванного перемещением объекта обнаружения (нарушителем) через его ЗО, на входе ПРМ. Уровень полезного сигнала выше, если нарушитель пересекает ЗО вблизи ПРМ (ПРД), чем если он пересекает ЗО ближе к ее середине. Полезный сигнал представляет собой промодулированные по амплитуде колебания радиоволн, излучаемых ПРД и принимаемых ПРМ СО, возникающие при перекрытии его ЗО нарушителем. Уровень полезного сигнала определяется глубиной модуляции и зависит от степени перекрытия геометрических размеров ЗО телом нарушителя [6].
Также известно, что ЗО средства ограничена областью, существенно участвующей в процессе распространения радиоволн, и представляет собой эллипсоид вращения между приемником и передатчиком. Размеры этой области определяются диаметром первой зоны Френеля, так как действие остальных смежных зон Френеля высших порядков взаимно компенсируется [7]. Площадь сечения первой зоны Френеля различна по всей длине ЗО: максимальное значение она имеет не далее 10 метров от середине длины ЗО, а минимальное - не далее 10 метров от ПРМ (ПРД) СО (фиг. 5, 6) [2, 3].

где SB’ - площадь сечения первой зоны Френеля на ближайшем к ПРД участке, м2;
SA’ - площадь сечения первой зоны Френеля на участке, ближайшем к ПРМ, м2.
Площадь сечения первой зоны Френеля определяется как:
- на ближайшем к ПРД участке:

- на участке, ближайшем к ПРМ:

где DB’ - диаметр первой зоны Френеля на ближайшем к ПРД участке, м2;
DA’ - диаметр первой зоны Френеля на участке, ближайшем к ПРМ, м2.
В свою очередь, диаметр первой зоны Френеля на участках пересечения ЗО средства с дорогой (фиг. 3):
- на ближайшем к ПРД участке:

- на участке ближайшем к ПРМ:

где L - длина ЗО СО, м2;
LB’ - расстояние от ПРД СО до ближайшего участка пересечения ЗО средства нарушителем, м;
LA’ - расстояние от ПРМ СО до ближайшего участка пересечения ЗО средства нарушителем, м;
λ - длина волны, м.
В соответствии с предлагаемой схемой развертывания СО площадь сечения первой зоны Френеля на ближайшем к ПРД участке (не далее 10 метров от середины ЗО) превышает не менее чем в 2 раза SB’ площадь сечения первой зоны Френеля на участке не далее 10 метров от ПРМ SA’ (фиг. 3, 6):

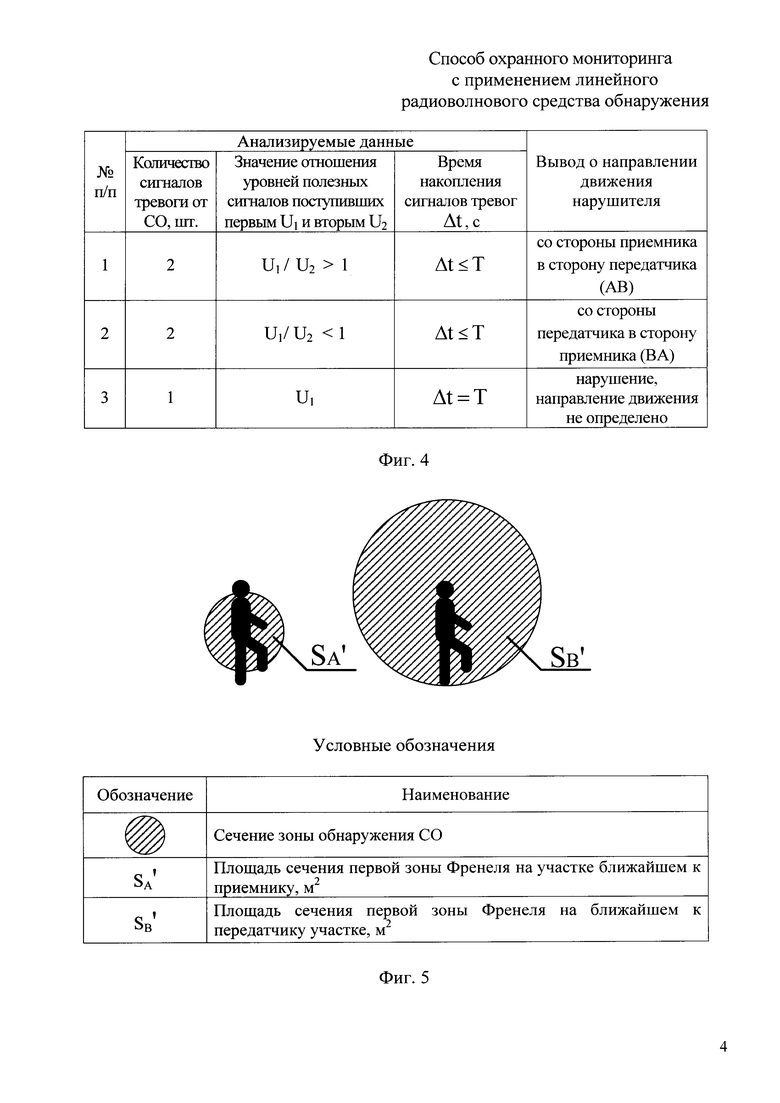
При движении через ЗО СО нарушитель перекрывает первую зону Френеля, на входе ПРМ регистрируется полезный сигнал [8]. Степень перекрытия определяется отношением площади тела нарушителя (Z) к площади сечения первой зоны Френеля SB’ (SA’). Она больше на участке пересечения ЗО с дорогой, ближнем к приемнику, и меньше на участке, ближнем к передатчику (фиг. 5, 7):

Уровень полезного сигнала (U), при прочих равных условиях, тем больше, чем выше степень перекрытия первой зоны Френеля СО объектом обнаружения (нарушителем):

где U - уровень полезного сигнала, В;
S - площадь сечения первой зоны Френеля, м2;
Z - площадь тела нарушителя, м2.
Поэтому при развертывании СО по предлагаемой схеме уровень полезного сигнала при движении нарушителя через ближайший к ПРМ участок пересечения ЗО с дорогой будет выше, чем уровень полезного сигнала при движении нарушителя через ближайший к ПРД участок пересечения ЗО с дорогой (фиг. 3):

где UB’ - уровень полезного сигнала при движении нарушителя через ближайший к ПРД участок пересечения ЗО с дорогой;
UA’ - уровень полезного сигнала при движении нарушителя через ближайший к ПРМ участок пересечения ЗО с дорогой.
С учетом предлагаемой схемы развертывания СО, по значению отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым (больше единицы или меньше единицы), можно сделать вывод о направлении движения обнаруженного нарушителя:
- если значение отношения уровня полезного сигнала, поступившего первым (U1), к уровню полезного сигнала, поступившего вторым (U2), больше единицы, то направление движения нарушителя со стороны ПРМ в сторону ПРД (направление АВ) (фиг. 3, 4):

- если значение отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым меньше единицы, то направление движения нарушителя со стороны ПРД в сторону ПРМ (направление ВА) (фиг. 3, 4):

Для исключения ошибок вывода о направлении движения обнаруженного нарушителя поступающие сигналы тревог принимаются в течение установленного времени накопления сигналов тревог Δt. Максимальное значение времени накопления сигналов тревог (Т) определяется исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения с дорогой, с учетом коэффициента запаса 1, 2 (фиг. 3, 8):

где Т - максимальное значение времени накопления сигналов тревог, с;
A’O - расстояние между вершиной изгиба дороги и ближайшим к ПРМ участком пересечения ЗО с дорогой, м;
ОВ’ - расстояние между вершиной изгиба дороги и ближайшим к ПРД участком пересечения ЗО с дорогой, м;
VMIN - минимально возможная скорость движения нарушителя, м/с.
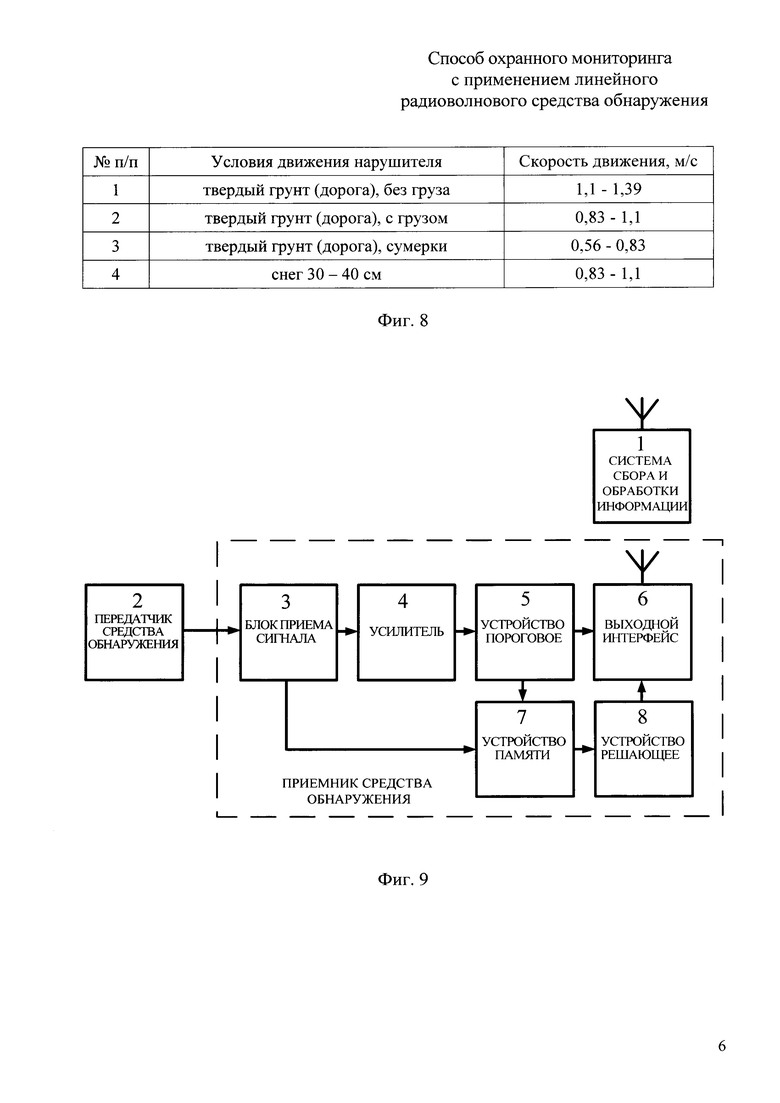
Минимально возможная скорость берется исходя из условий местности. Диапазон скоростей нарушителя на различных участках местности известен и подтвержден на основе экспериментальных исследований (фиг. 8) [4, 9].
Сигнал о направлении движения нарушителя (движение нарушителя со стороны ПРМ в сторону ПРД или движение нарушителя со стороны ПРД в сторону ПРМ) передается ПРМ СО системе сбора и обработки информации.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание на местности системы 1 сбора и обработки информации (фиг. 9).
2. Развертывание на изгибе дороги по установленной предлагаемой схеме средства обнаружения, включающего в себя: передатчик 2 и приемник, состоящий из блока 3 приема сигналов, усилителя 4, устройства 5 порогового, выходной 6 интерфейс, устройства 7 памяти, устройства 8 решающего (фиг. 3, 9).
3. Определение максимального значения времени накопления сигналов тревог (Т) и его запись в устройство 7 памяти (формула 12).
Основной этап начинается при движении нарушителя через изгиб дороги и попадании его в ЗО СО, он включает в себя:
1. Формирование полезного сигнала на входе блока 3 приема сигналов, усиление сигнала усилителем 4 и поступление его на устройство 5 пороговое (фиг. 9).
2. Формирование устройством 5 пороговым первого сигнала тревоги (фиг. 9).
3. Передачу сигнала тревоги выходным 6 интерфейсом на систему 1 сбора и обработки информации (фиг. 9).
4. Передачу команды управления устройством 5 пороговым устройству 7 памяти на запись уровня полезного сигнала поступающего с блока 3 приема сигналов (фиг. 9).
5. Начало записи устройством 7 памяти уровня полезного сигнала и начало отсчета времени накопления сигналов тревог (Δt) (фиг. 9).
6. Выход нарушителя из ЗО СО, формирование устройством 5 пороговым дежурного сигнала (фиг. 9).
7. Передачу команды управления устройством 5 пороговым устройству 7 памяти на окончание записи уровня полезного сигнала, поступающего с блока 3 приема сигналов, окончание записи устройством 7 памяти уровня полезного сигнала (фиг. 9).
8. Передачу информации устройством 7 памяти об уровне полезного сигнала, поступившего первым на устройство 8 решающее (фиг. 9).
9. Второе по счету пересечение нарушителем ЗО СО.
10. Формирование полезного сигнала на входе блока 3 приема сигналов, усиление сигнала усилителем 4 и поступление его на устройство 5 пороговое (фиг. 9).
11. Формирование устройством 5 пороговым второго сигнала тревоги (фиг. 9).
12. Передачу второго сигнала тревоги выходным 6 интерфейсом на систему 1 сбора и обработки информации (фиг. 9).
13. Передачу команды управления устройством 5 пороговым устройству 7 памяти на запись уровня полезного сигнала поступающего с блока 3 приема сигналов (фиг. 9).
14. Начало записи устройством 7 памяти уровня полезного сигнала, поступившего вторым (фиг. 9).
15. Выход нарушителя из ЗО СО, формирование устройством 5 пороговым дежурного сигнала (фиг. 9).
16. Передачу команды управления устройством 5 пороговым устройству 7 памяти на окончание записи уровня полезного сигнала, поступающего с блока 4 приема сигналов, и конец отсчета времени накопления сигналов тревог (Δt), окончание записи устройством 7 памяти уровня полезного сигнала и отсчета времени накопления сигналов тревог (Δt) (фиг. 9).
17. Передачу информации устройством 7 памяти об уровне полезного сигнала, поступившего вторым, и значения времени накопления сигналов тревог (Δt) на устройство 8 решающее (фиг. 9).
18. Определение отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым устройством 8 решающим (фиг. 9).
19. Определение устройством 8 решающим направления движения нарушителя:
- если значение отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым, больше единицы, то направление движения нарушителя со стороны приемника в сторону передатчика (направление АВ) (фиг. 3, 7);
- если значение отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым, меньше единицы, то направление движения нарушителя со стороны передатчика в сторону приемника (направление ВА) (фиг. 3, 7).
20. Передача сигнала о направлении движения нарушителя приемником средства обнаружения через выходной 6 интерфейс системе 1 сбора и обработки информации (фиг. 9).
21. При достижении времени накопления сигналов тревог (Δt) своего максимального значения (Т) и не поступлении второго сигнала тревоги, принятие устройством 8 решающим решения об окончании накоплении сигналов (фиг. 6). Передачу через выходной 6 интерфейс системе 1 сбора и обработки информации сигнала о том, направление движения нарушителя не определено (фиг. 9).
22. Обнуление памяти устройства 7 памяти (фиг. 9).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания одного линейного радиоволнового средства обнаружения в известном способе охранного мониторинга;
- фиг. 2 - схема развертывания двух линейных радиоволновых средств обнаружения в известном способе охранного мониторинга;
- фиг. 3 - схема развертывания линейного радиоволнового средства обнаружения в предлагаемом способе охранного мониторинга с указанием размеров;
- фиг. 4 - таблица принятия решения (алгоритм вывода) о направлении движения нарушителя через изгиб дороги;
- фиг. 5 - схема соотношения размеров нарушителя и площади поперечного сечения первой зоны Френеля зоны обнаружения;
- фиг. 6 - таблица типовых размеров зоны обнаружения линейных радиоволновых средств обнаружения;
- фиг. 7 - схема, показывающая степень перекрытия нарушителем зоны обнаружения линейного радиоволнового средства обнаружения в зависимости от места ее пересечения (вид сверху);
- фиг. 8 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 9 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в получении возможности определения направления движения нарушителя, обнаруженного на дороге, с применением только одного СО.
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
5. Ганьшин В.Н., Хренов В.С. Таблицы для разбивки круговых и переходных прямых. - К.: 1974. - 432 с.
6. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
7. Долуханов М.П. Распространение радиоволн: Учебник - М.: Связьиздат, 1960. - 391 с.
8. Никитин Н.В., Малемин С.Г. Применение радиоволновых и комбинированных извещателей с целью повышения обнаруживающей способности и помехозащищенности. Методическое пособие (Р 78.36.022-2013). - М.: НИЦ «Охрана», 2012. - 120 с.
9. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.


Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения одного линейного радиоволнового средства обнаружения (СО) для сигнализационного контроля дороги на участке, где она имеет изгиб. Технический результат заключается в повышении точности мониторинга за счет определения направления движения нарушителя, обнаруженного на дороге, с применением только одного СО. В способе при контроле изгиба дороги одним СО приемник и передатчик разворачивают с противоположных сторон от точки изгиба дороги так, чтобы зона обнаружения средства пересекала дорогу на двух участках на соответствующем расстоянии от приемника и передатчика, при этом площади сечения первой зоны Френеля на участках различались, определяют направление движения нарушителя по значению отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым, устанавливают максимальное значение времени накопления сигналов тревог, исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения с дорогой, и передают системе сбора и обработки информации сигнал о направлении движения нарушителя. 9 ил.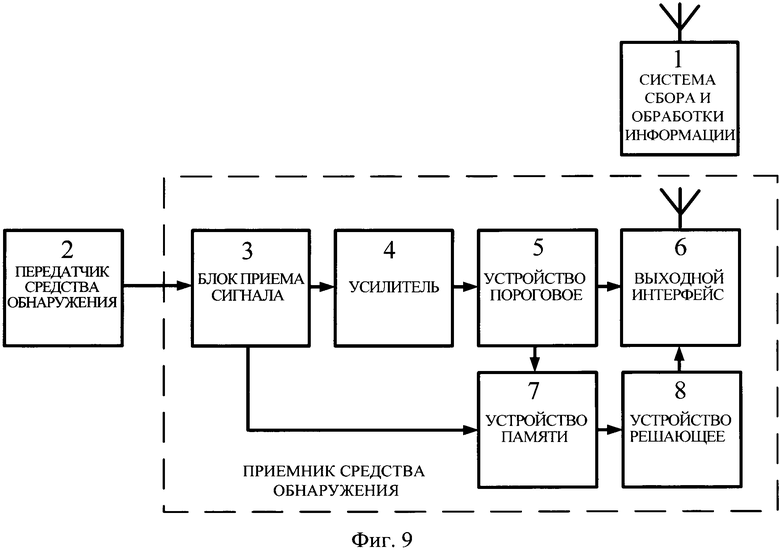
Способ охранного мониторинга с применением линейного радиоволнового средства обнаружения, заключающийся в контроле дороги одним линейным радиоволновым средством обнаружения, формировании приемником средства обнаружения сигнала тревоги при пересечении нарушителем зоны обнаружения, обеспечении передачи сигнала тревоги от приемника на систему сбора и обработки информации, отличающийся тем, что средство обнаружения разворачивают на участке дороги, где она имеет изгиб, приемник и передатчик средства обнаружения разворачивают с противоположных сторон от точки изгиба дороги так, чтобы зона обнаружения средства пересекала дорогу на двух участках, расстояние от приемника до ближайшего к нему участка не превышало 10 метров, расстояние от передатчика до ближайшего к нему участка превышало половину расстояния приемник-передатчик не более чем на 10 метров, а площади сечения первой зоны Френеля на участках различались: площадь сечения на участке, ближайшем к приемнику, была не менее чем в два раза меньше площади сечения на ближайшем к передатчику участке, приемник дважды формирует сигнал тревоги при движении нарушителя через изгиб дороги, а приемник средства обнаружения записывает оба уровня полезных сигналов тревоги в течение всей длительности режимов тревоги, применяя алгоритм, определяющий направление движения нарушителя: со стороны приемника в сторону передатчика или со стороны передатчика в сторону приемника по значению отношения уровня полезного сигнала, поступившего первым, к уровню полезного сигнала, поступившего вторым, больше единицы или меньше единицы, максимальное значение времени накопления сигналов тревог устанавливают исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения с дорогой, приемник средства обнаружения передает системе сбора и обработки информации сигнал о направлении движения нарушителя.
| СПОСОБ АНАЛИЗИРОВАНИЯ ДАННЫХ, ПОЛУЧЕННЫХ ОТ ОБЪЕДИНЕННЫХ ДЕТЕКТОРОВ РАДАРОВ | 2010 |
|
RU2515465C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ ДЛЯ ОХРАНЫ ПЕРИМЕТРОВ | 2007 |
|
RU2371776C2 |
| EP 31846775 B1, 10.02.2010 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

