Изобретение относится к области подводного кораблестроения, а именно к пусковым установкам, предназначенным для постановки-запуска оружия и объектов различного назначения, и может быть использовано при создании специализированных комплексов морского базирования для постановки-запуска оружия, приборов радиоэлектронной борьбы и т.д. с подводной лодки.
Известна пусковая установка для запуска ракет преимущественно с палубы надводного корабля (RU, патент №2287127, опубл. 10.11.2006 г), включающая размещенный под палубой подъемник пакетов пусковых труб для ракет, башню с узлами наведения ракет, которые содержат как минимум одну силовую стрелу для пакета. Подъемник выполнен в виде заряжающего устройства, включающего барабан с балками для пакетов, оборудованных полозками и штырем, каретку, установленную с возможностью перемещения по балкам и снабженную подпружиненным рычагом с Г-образным выступом для захвата штыря на пакете, промежуточные балки, закрепленные с возможностью стыковки с балками на барабане, и переходные балки, установленные на прикрепленной к палубе раме с возможностью сопряжения одним концом с промежуточными балками, а другим - со стрелами на башне, которые закреплены на оси, связанной с приводом вертикального наведения, при этом башня установлена на палубе с возможностью сообщения с заряжающим устройством через люки в раме. Башня с приводами наведения установлена на палубе, а пакеты с ракетами хранятся под палубой в заряжающем устройстве, которое перемещает только пакеты.
Недостатком является наличие общего барабана с излишней мощностью и энергозатратами, а область использования пусковой установки ограничена надводными носителями.
Известна пусковая установка подводной лодки системы противоторпедной защиты С303/S фирма Whitehead Alenia Sistami Subacqua (Интернет, http://www.whiteheadaleniasistemisubacquei.com, фиг. 1 и 2, Италия,). Пусковая установка представляет собой многоствольный герметичный модуль, размещаемый вне прочного корпуса подводной лодки. Пусковая установка содержит в модуле до 12 стволов, вместе с тем количество стволов в модуле и количество модулей может быть изменено под требования конструкции подводной лодки. Каждый ствол пусковой установки, загруженный соответствующим прибором РЭБ, имеет переднюю крышку, воздушный баллон, электрический клапан, что обеспечивает независимость при стрельбе от других стволов ПУ. ПУ установлены в фиксированном положении и закрыты подвижным элементом легкого корпуса, что не меняет наружный профиль ПЛ. Перед стрельбой ПУ выдвигается из пространства легкого корпуса гидроприводом. Стрельбу осуществляют в попутный поток.
Недостатками являются ограниченные функциональные возможности и низкая надежность, обусловленные невозможностью обслуживания и ремонта приборов РЭБ, загруженных в стволы ПУ. Перезарядку ПУ производят только при нахождении в базе.
Известна пусковая установка подводной лодки (RU, патент №2412855, опубл. 27.02.2011 г.), принятая за прототип и включающая пусковую трубу с верхней и нижней крышками и их приводами, установленную в прочном корпусе, соединенную с системами заполнения, осушения, уравнивания давления и стрельбы. Пусковая установка снабжена устройством перезарядки приборов револьверного типа и направляющей, установленными на прочном корпусе перед нижней крышкой пусковой трубы, а также автоматизированной системой управления. При этом в основании устройства перезарядки приборов выполнен механизм разворота, на котором закреплены ячейки с приборами, а направляющая одним концом сопряжена с пусковой трубой, а на другом ее конце соосно с пусковой трубой установлена каретка подачи приборов. Устройство перезарядки приборов закреплено с возможностью разворота, поочередного совпадения ячеек с направляющей и контакта прибора с кареткой. Т.е. направляющая с кареткой подачи являются средством заряжания, а устройство перезарядки приборов револьверного типа на поворотном основании с ячейками для приборов является средством погрузки приборов и средством хранения одновременно. Пусковая труба снабжена стопором прибора и электроразрывным соединителем, механизмы и исполнительные устройства снабжены сигнализаторами их положения, а системы заполнения, осушения, уравнивания давления и стрельбы снабжены датчиками давления и уровня. Механизм разворота закреплен в основании устройства перезарядки приборов при помощи вертикальной оси вращения и подшипника.
Недостатками являются ограниченные функциональные возможности пусковой установки:
- малое количество приборов в устройстве перезарядки приборов револьверного типа;
- значительное время заряжания устройства перезарядки приборами с дополнительного стеллажа;
- увеличение количества приборов ведет к значительному увеличению массы устройства перезарядки, что требует дальнейшего увеличения мощности механизма разворота;
- механизм разворота излишне мощный, так как для перезарядки одного прибора ему необходимо разворачивать все устройство перезарядки с другими закрепленными в нем приборами;
- высокие нагрузки, приходящиеся на ось вращения барабана при неравномерном расходовании приборов в барабане и особенно в условиях деформаций при обжатии прочного корпуса;
- отсутствие возможности устранения расхождения осей пусковой трубы и средства погрузки и хранения револьверного типа, вызванного обжатием прочного корпуса в условиях деформаций.
Задачей изобретения является разработка пусковой установки с устройством перезарядки с такой конструкцией, которая позволяет устранить указанные недостатки.
Техническим результатом является повышение надежности пусковой установки, повышение скорострельности и расширение ее функциональных возможностей.
Технический результат достигается тем, что в пусковой установке подводной лодки, включающей пусковую трубу, установленную в прочном корпусе, со стопором прибора, с верхней и нижней крышками и их приводами, устройство перезарядки, включающее заряжающую балку, установленную перед нижней крышкой пусковой трубы, с соосной с пусковой трубой кареткой подачи прибора с приводом ее возвратно-поступательного линейного движения по заряжающей балке и средство хранения с ячейками для приборов, автоматизированную систему управления, механизмы, снабженные сигнализаторами их положения, средство хранения устройства перезарядки выполнено в виде как минимум, одной сборно-модульной силовой рамы с горизонтально ориентированными ячейками для хранения соосно размещаемых в них приборов, расположенных в зоне взаимодействия с кареткой подачи прибора заряжающей балки, при этом заряжающая балка с кареткой подачи прибора установлена подвижно, как минимум с двумя степенями свободы, с возможностью поворота в вертикальной плоскости из вертикального положения в горизонтальное и обратно относительно подвижной в вертикальном направлении горизонтальной поворотной оси и с возможностью вертикального линейного перемещения заряжающей балки с кареткой подачи прибора по направляющей стойке, установленной неподвижно или с возможностью поворота в горизонтальной плоскости относительно вертикальной оси поворота, для перемещения каретки подачи прибора с заряжающей балкой в соосное положение с выбранной горизонтально ориентированной ячейкой или ячейкой с прибором.
Для взаимодействия прибора в ячейке и каретки подачи прибора, силовые рамы могут быть установлены относительно заряжающей балки и каретки подачи прибора с возможностью обеспечения соосности каретки подачи прибора с продольной осью выбранной ячейки при горизонтальном положении заряжающей балки, а относительно пусковой трубы, как минимум, одна силовая рама может быть установлена таким образом, что продольные оси ее горизонтально ориентированных ячеек перпендикулярны продольной оси пусковой трубы и расположены с ней в одной вертикальной плоскости.
Направляющая стойка может быть установлена на поворотном основании, а продольные оси горизонтально ориентированных ячеек любой силовой рамы перпендикулярны продольной оси пусковой трубы и вертикальной оси поворота направляющей стойки и могут быть расположены в одной вертикальной плоскости с вертикальной осью поворота направляющей стойки.
Устройство перезарядки пусковой установки может быть дополнительно снабжено блоком обеспечения соосности, выполненным в виде двух платформ, верхней и нижней, подвижно соединенных между собой с возможностью их линейного перемещения друг относительно друга, при этом нижняя платформа жестко закреплена на поворотном или неподвижном основании устройства перезарядки, а на верхней подвижной платформе установлена направляющая стойка, которая шарнирно соединена с пусковой трубой.
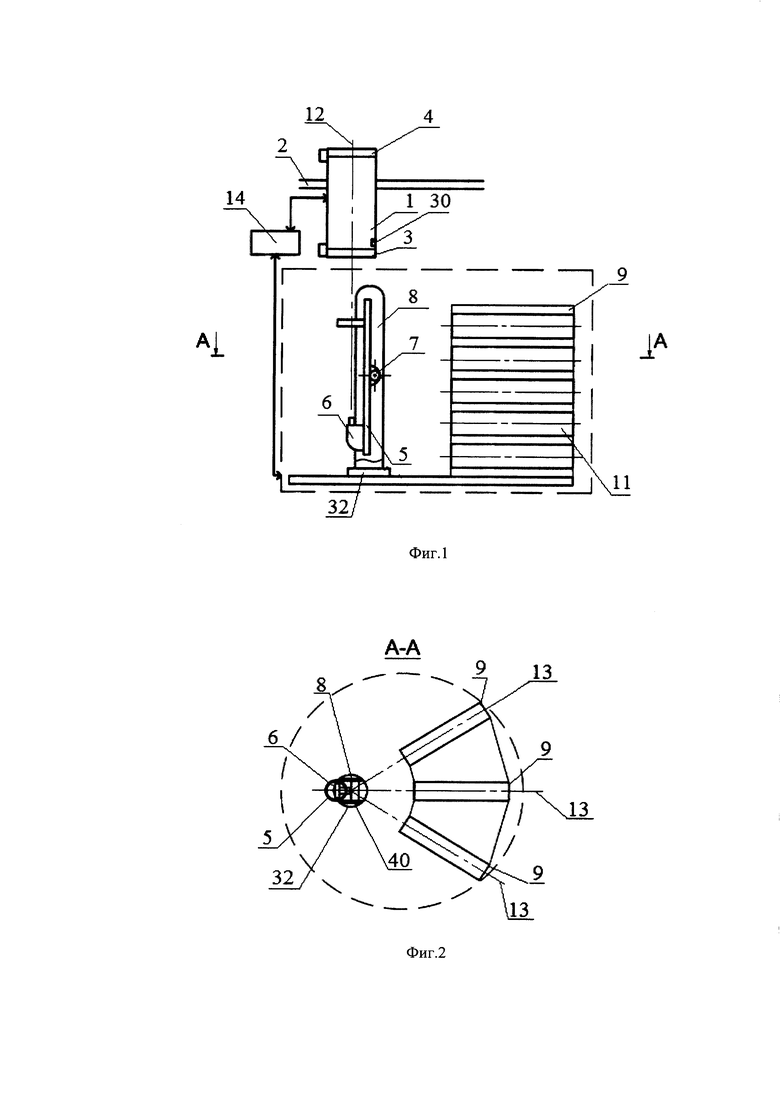
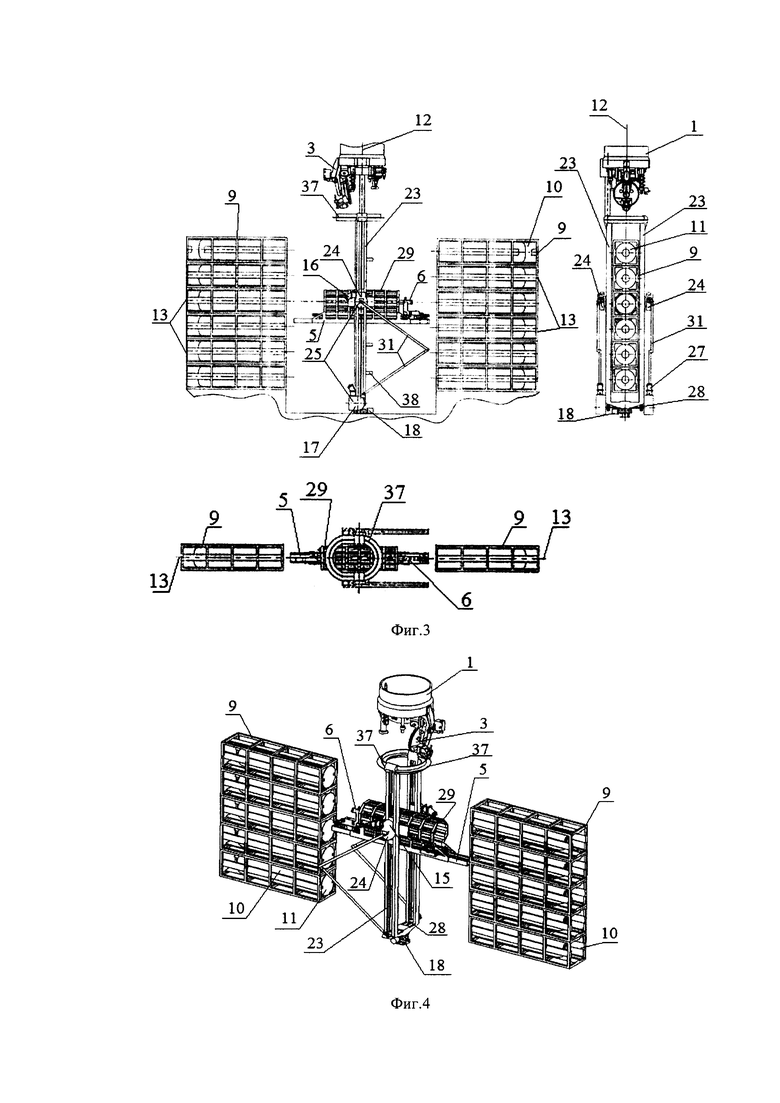
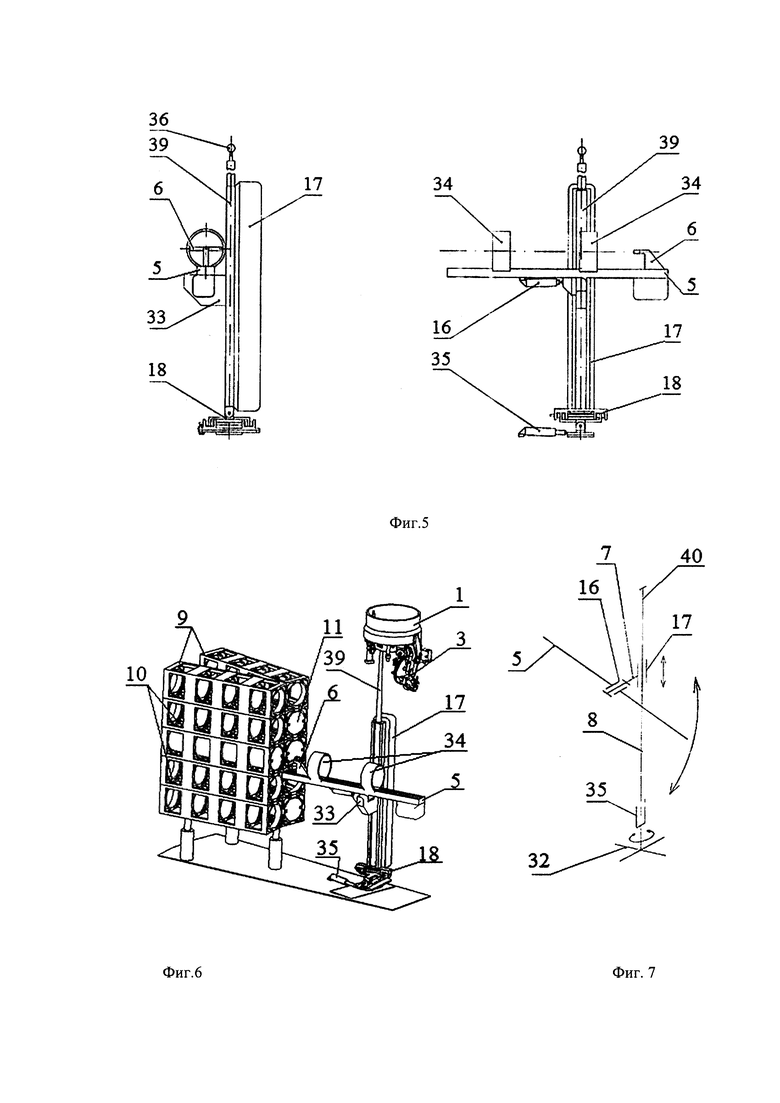
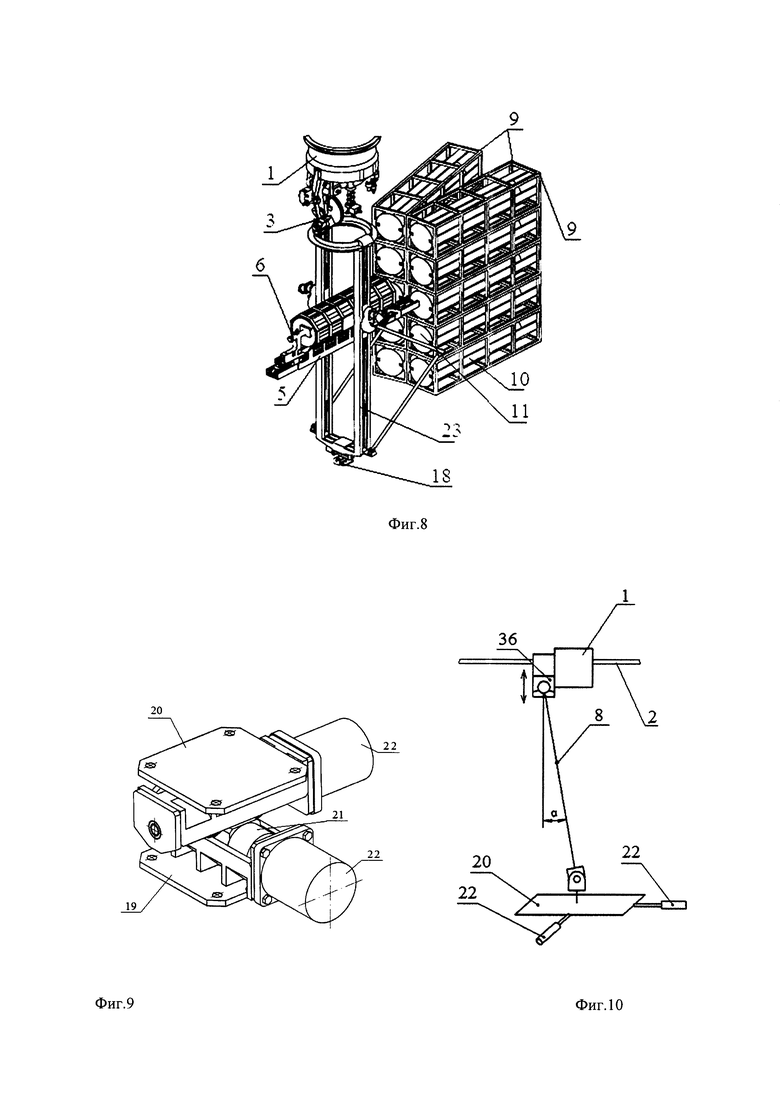
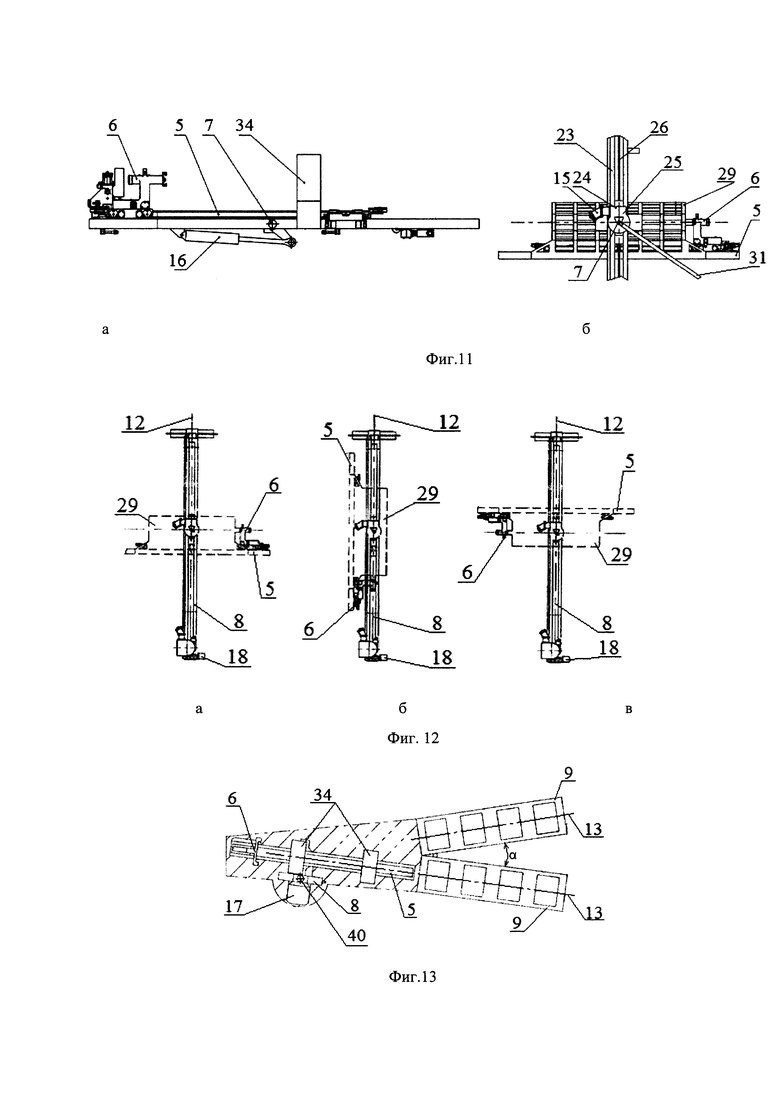
Устройство поясняется чертежами, где на фиг. 1 и фиг. 2 представлены схемы расположения устройства перезарядки с подвижной заряжающей балкой в пусковой установке в исходном положении, фронтальный вид и сечение А-А, вид сверху соответственно. На фиг. 3 и фиг. 4 представлены три вида и аксонометрия пусковой установки с устройством перезарядки по примеру исполнения 1 с заряжающей балкой с двумя степенями свободы в горизонтальном ее положении и двумя продольно-оппозитными силовыми рамами. На фиг. 5 и фиг. 6 представлена два вида и аксонометрия пусковой установки с устройством перезарядки по примеру исполнения 3 с заряжающей балкой с тремя степенями свободы в горизонтальном ее положении и V-образно расположенными двумя силовыми рамами. На фиг. 7 представлена кинематическая схема установки подвижной заряжающей балки 5 с тремя степенями свободы по примерам исполнения 3 и 4. На фиг. 8 представлена аксонометрия пусковой установки с устройством перезарядки по примеру исполнения 4 с заряжающей балкой с тремя степенями свободы в горизонтальном ее положении и V-образно расположенными двумя силовыми рамами. На фиг. 9 представлена аксонометрия блока обеспечения соосности, на фиг. 10 представлена схема установки блока обеспечения соосности и направляющей стойки в пусковой установке. На фиг. 11 представлены а - привод кантования в виде гидроцилиндра для примеров исполнения 2, 3 и 4 и б - привод кантования в виде гидромотора с редуктором для примера исполнения 1. На фиг. 12 представлена схема заряжания прибора для примера исполнения 1 из левой и правой силовых рам, расположенных продольно-оппозитно. На фиг. 13 представлена схема V-образного расположения силовых рам 9 для примеров исполнения 3 и 4 и рабочая зона подвижной заряжающей балки.
Пусковая установка подводной лодки включает (фиг. 1) пусковую трубу 1, установленную в прочном корпусе 2, снабженную стопором прибора, с верхней 3 и нижней 4 крышками и их приводами, устройство перезарядки, автоматизированную систему управления установкой 14, механизмы, снабженные сигнализаторами их положения (не показано). Устройство перезарядки включает заряжающую балку 5, установленную в прочном корпусе 2 перед нижней крышкой 4 пусковой трубы 1, с соосной с пусковой трубой 1 каретку подачи 6 прибора 11 с приводом ее возвратно-поступательного линейного движения по заряжающей балке 5. Заряжающая балка 5 с кареткой подачи 6 установлена в прочном корпусе 2 на направляющей стойке 8, подвижно, как минимум с двумя степенями свободы. Средство хранения приборов в виде, как минимум, одной сборно-модульной силовой рамы 9 с горизонтально ориентированными ячейками 10 для хранения соосно размещаемых в них приборов 11. Приборы расположены в прочном корпусе 2 в зоне взаимодействия с кареткой подачи 6 заряжающей балки 5.
Выполнение средства хранения в виде сборно-модульных силовых рам 9 с горизонтально ориентированными ячейками 10 для хранения приборов 11 обеспечивает более высокую плотность размещения и хранения приборов 11 в прочном корпусе 2, чем их хранение в устройстве перезарядки и на дополнительном стеллаже пусковой установки прототипа. Размещение приборов соосно ячейке так же обеспечивает высокую плотность хранения в силовой раме. Высокая плотность горизонтального размещения и сборно-модульная конструкция силовой рамы обеспечивают увеличение количества приборов в устройстве перезарядки, что расширяет функциональные возможности пусковой установки. В отличие от прототипа, одна и более сборно-модульные силовые рамы, выполняют функцию хранения всех используемых пусковой установкой горизонтально ориентированных приборов в зоне взаимодействия с кареткой подачи 6 заряжающей балки 5.
В зависимости от требуемого количества приборов для пусковой установки и от их размеров устанавливают одну или две или более сборно-модульные силовые рамы. При этом, увеличение количества приборов в устройстве перезарядки не ведет к значительному увеличению массы средства хранения устройства перезарядки, и не требует дальнейшего увеличения мощности механизма разворота средства погрузки, как в прототипе.
Сборно-модульное силовые рамы 9 позволяют устранить раздельное хранение приборов прототипа, а именно, частично в подвижном устройстве перезарядки, частично на дополнительном стеллаже, и тем самым исключить временные затраты на ручную перегрузку приборов из дополнительного стеллажа в устройство перезарядки, уменьшить время загрузки/выгрузки и повысить скорострельность пусковой установки.
Силовые рамы 9 обеспечивают размещение всех используемых пусковой установкой приборов 11 в зоне взаимодействия с кареткой подачи 6 прибора, что позволяет заменить трудоемкую ручную операцию погрузки из дополнительного стеллажа прототипа на полную автоматизацию процесса погрузки, тем самым повысить степень автоматизации процесса перезарядки пусковой установки. Наличие индивидуальных горизонтально ориентированных ячеек в силовых рамах 9 обеспечивает индивидуальный автоматический доступ к каждому прибору 11 для соосной с ним каретки подачи 6 для его погрузки из ячейки 10 на заряжающую балку 5, что также позволяет полностью автоматизировать погрузку всех приборов 11 из устройства перезарядки и повышает степень автоматизации процесса перезарядки и, тем самым, расширяет функциональные возможности.
Взаимодействие выбранного прибора и каретки подачи 6 заряжающей балки 5 возможно при их условии их соосности. Любая ячейка 10 любой силовой рамы 9 обеспечивает возможность взаимодействия соосно расположенного в ней прибора с соосно ориентируемой с ним кареткой подачи 6 заряжающей балки 5. Если ячейка 10 силовой рамы 9 без прибора, например, при загрузке приборов из пусковой трубы 1, то каретку подачи 6 ориентируют соосно с выбранной ячейкой 10.
Хранение всех используемых приборов в устройстве перезарядки и повышение степени автоматизации их погрузки обеспечивают повышение скорострельности пусковой установки.
Модульность силовых рам 9 обеспечивает быстрый и удобный доступ к каждому прибору в индивидуальных ячейках 10 хранения и быстроту технического обслуживания, диагностики, контроля и ремонта всех используемых приборов 11 модульной силовой рамы 9, что повышает надежность хранения и надежность пусковой установки в целом.
Горизонтальный способ хранения приборов и конструкция сборно-модульной силовой рамы 9 с горизонтально ориентированными ячейками определяет отличительные конструктивные особенности установки заряжающей балки 5 с кареткой подачи 6 прибора 11. Установка заряжающей балки 5 с кареткой подачи 6 подвижно, как минимум, с двумя степенями свободы, обеспечивает повышение степени автоматизации, скорострельности и надежности пусковой установки.
Горизонтальный способ хранения в горизонтально ориентированных ячейках 10 в силовой раме 9 определяет необходимость кантования в вертикальной плоскости каждого прибора 11 из горизонтального положения его хранения в вертикальное положение для заряжания пусковой трубы 1. Установка заряжающей балки 5 с кареткой подачи 6 с возможностью поворота в вертикальной плоскости из вертикального положения в горизонтальное и обратно относительно горизонтальной поворотной оси реализует первую степень свободы заряжающей балки 5 с кареткой подачи 6 и позволяет реализовать затем перемещение одного горизонтально ориентированного прибора 11 из выбранной ячейки 10 и его кантование в ограниченном пространстве устройства перезарядки в прочном корпусе 2 подводной лодки. Для реализации указанной возможности поворота из вертикального положения в горизонтальное и обратно, заряжающая балка 5 с кареткой подачи 6 установлена на горизонтальной поворотной оси 7. Для минимизации пространства, необходимого для кантования прибора 11, горизонтальная поворотная ось 7 расположена в середине заряжающей балки 5, а поворот заряжающей балки 5 для кантования производят в центральной части направляющей стойки 8 на оси кантования.
Для заряжания прибора 11 из выбранной ячейки 10, перед кантованием каждый прибор 11 необходимо переместить из горизонтально ориентированной ячейки 10 хранения на заряжающую балку 5, которую поворотом ранее устанавливают в горизонтальное положение. Установка заряжающей балки 5 с кареткой подачи 6 с возможностью вертикального линейного перемещения по направляющей стойке 8 реализует вторую степень свободы заряжающей балки 5 и каретки подачи 6. Для перемещения прибора 11 из выбранной ячейки 10, горизонтальную заряжающую балку 5 перемещают в вертикальном направлении, позиционируя каретку подачи 6 относительно продольной оси 13 каждой выбранной ячейки 10 с прибором 11, что позволяет затем каретке подачи 6 взаимодействовать с прибором 11. Для реализации возможности указанного перемещения, горизонтальная поворотная ось 7, на которой закреплена заряжающая балка 5 с кареткой подачи 6, выполнена подвижной в вертикальном направлении и установлена с возможностью вертикального перемещения совместно с заряжающей балкой 5 с кареткой подачи 6 по направляющей стойке 8.
Установка направляющей стойки 8 с возможностью поворота в горизонтальной плоскости относительно оси поворота 40 реализует третью степень свободы установленной на ней заряжающей балки 5 с кареткой подачи 6 и обеспечивает указанный поворот заряжающей балки 5 в горизонтальном ее положении для позиционирования каретки подачи 6 относительно выбранной ячейки 10 с прибором 11, как минимум, одной силовой рамы 9, в которой ячейки 10 расположены под углом к заряжающей балке 5 в горизонтальном ее положении, что позволяет выбирать и перемещать на заряжающую балку 5 прибор 11 из указанной силовой рамы 9.
Степени свободы обеспечены наличием гидравлических или электрических приводов для каждого вида перемещения. Варианты конструктивной реализации указанных возможностей приведены в примерах 1, 2, 3 и 4.
Аналогично прототипу, заряжающая балка 5 снабжена соосной с пусковой трубой 1 кареткой подачи 6 прибора 11 с приводом ее возвратно-поступательного линейного движения по заряжающей балке 5. В отличие от прототипа, кроме функции вертикального заряжания прибора 11 в пусковую трубу 1, заряжающая балка 5 с кареткой подачи 6 теперь дополнительно выполняют функцию перемещения любого выбранного горизонтально ориентированного прибора, находящегося в любой ячейке из любой силовой рамы 9 с его разворотом в вертикальное положение заряжания на ось пусковой трубы. Это позволяет полностью автоматизировать процесс погрузки приборов, осуществить перезарядку пусковой установки всеми используемыми приборами и тем самым повысить степень автоматизации и скорострельность пусковой установки.
Кареткой подачи 6 прибора 11 осуществляют взаимодействие с горизонтально ориентированным прибором в ячейке силовой рамы 9 и перемещение его из силовой рамы 9 на горизонтально ориентированную заряжающую балку 5, а при кантовании кареткой подачи 6 удерживают прибор 11 от его перемещения на заряжающей балке 5. После обратного поворота заряжающей балки 5 с прибором в вертикальное положение соосной с пусковой трубой 1 кареткой подачи 6 осуществляют заряжание прибора 11 в пусковую трубу 1, аналогично прототипу. Каретка подачи 6 при вертикальном положении заряжающей балки 5 соосна с продольной осью пусковой трубой 1, а при горизонтальном положении заряжающей балки 5 каретка подачи 6 соосна с продольной осью выбранной ячейки 10 с прибором 11 или выбранной ячейки 10, что обеспечивает взаимодействие каретки подачи 6 заряжающей балки 5 с каждым выбранным прибором в ячейке.
Каретку подачи 6 прибора 11 перемещают по горизонтально ориентированной заряжающей балки и по вертикально ориентированной заряжающей балке с помощью одного привода. Мощность привода каретки рассчитана на один прибор, такая же как в прототипе, и не требует увеличения мощности при увеличении количества приборов.
Установка заряжающей балки 5, как минимум, с двумя степенями свободы и кареткой подачи 6 позволяет заряжающей балке 5 выполнять функцию средства погрузки и заряжания, что позволяет при погрузке перемещать только один прибор, а не весь барабан с приборами, и обеспечивает снижение требования по энергообеспечению, уменьшает энергоемкость и энергетические затраты, и тем самым повышает надежность устройства перезарядки и пусковой установки.
Так как заряжающая балка 5 манипулирует одним прибором, то вес средства погрузки и заряжания с одним прибором много меньше веса устройства перезарядки барабанного типа с несколькими приборами в прототипе. Это снижает общую нагрузку на ось вращения в устройстве перезарядки и повышает надежность пусковой установки.
Силовые рамы 9 при этом установлены стационарно, без оси вращения, с равномерной нагрузкой на прочный корпус 2. Так как нет необходимости поворачивать силовые рамы 9 с приборами 11, то и нет затрат энергии на проворот, как у барабана с несколькими приборами прототипа, а также исключены перекосы при частично заполненной приборами силовой раме. Хранение приборов 11 в отдельных силовых рамах 9 обеспечивает снижение нагрузки на ось вращения поворотного основания 32 заряжающей балки 5 по сравнению с устройством перезарядки прототипа и снижение энергетических затрат на хранение, что повышает надежность устройства перезарядки и пусковой установки.
Конструктивно силовая рама 9 может быть выполнена в виде многоуровневого стеллажа из однотипных модулей - горизонтально ориентированных ячеек 10 для хранения приборов 11. Модульная конструкция реализована наличием однотипных горизонтально ориентированных ячеек 10, количество которых меняют в зависимости от требований по размещению приборов 11 в прочном корпусе 2 подводной лодки. Может быть установлено несколько одинаковых по конструкции стеллажей. Ячейка 10 состоит из каркаса, имеющего сварную трубчатую структуру, накладок, предназначенных для удобства подгонки ячеек 10 при сборке их в стеллаж, установленных на опоры дорожек, (не показано). Для фиксации прибора 11 от продольных перемещений используют стопорное устройство, например, состоящее из приводного линейного двигателя, L-образного рычага и стопора, непосредственно взаимодействующего со стопорной наделкой прибора (не показано).
Взаимодействие каретки подачи 6 заряжающей балки 5 и выбранного прибора, расположенного в ячейке силовой рамы, возможно при условии их соосности при горизонтальной положении заряжающей балки. Поэтому силовые рамы 9 установлены по отношению к заряжающей балке и каретке подачи 6 прибора 11 с возможностью обеспечения соосности каретки подачи 6 прибора 11 с продольной осью выбранной ячейки 10 с прибором при горизонтальном положении заряжающей балки 5. А относительно пусковой трубы, как минимум, одна силовая рама 9 установлена таким образом, что продольные оси 13 ее горизонтально ориентированных ячеек 10 перпендикулярны продольной оси пусковой трубы 12 и расположены с ней в одной исходной вертикальной плоскости.
Возможна различная комбинация расположения силовых рам 9 в устройстве перезарядки пусковой установки, в том числе линейное - продольно оппозитное, V-образное и одиночное, приведенные в примерах исполнения 1-4, и смешанный тип установки. Если направляющая стойка 8 установлена неподвижно, две силовые рамы 9 расположены в прочном корпусе 2 продольно-оппозитно или установлена одна силовая 9 (примеры 1-2). Если направляющая стойка 8 установлена на поворотном основании, то, как минимум, две силовые рамы 9 расположены в прочном корпусе 2 V-образно (примеры 3-4). В других смешанных вариантах, V-образно могут быть установлены, как минимум, две силовые рамы, а линейно - одна или две силовые рамы.
Конструкция устройства перезарядки прототипа не позволяет устранить расхождение осей пусковой трубы и средства погрузки и хранения револьверного типа, вызванного обжатием прочного корпуса 2 подводной лодки. Наличие в устройстве перезарядки подвижной заряжающей балки 5 для перемещения одного прибора 11 и раздельное хранение приборов позволяют реализовать возможность регулирования соосности оси 12 пусковой трубы 1 и каретки подачи 6 с прибором 11. Для этого устройство перезарядки пусковой установки дополнительно снабжено автоматическим блоком обеспечения соосности 18, который позволяет при заряжании устранить расхождение оси 12 пусковой трубы 1 и каретки подачи 6 с прибором 11 при обжатии прочного корпуса 2 подводной лодки. Это повышает надежность пусковой установки, т.к. позволяет устранить сбои в работе пусковой установки из-за расхождения указанных осей.
Автоматический блок обеспечения соосности 18 расширяет функциональные возможности пусковой установки. Регулирование соосности пусковой трубы 1 и оси каретки подачи 6 не требует отдельных временных затрат, т.к. проверка и восстановление соосности происходит например, после кантования, одновременно с движением каретки подачи 6 при заряжании, в связи с чем исключается негативное влияние на скорострельность.
Блок обеспечения соосности 18 выполнен в виде двух платформ, верхней 20 и нижней 19, подвижно соединенных между собой с помощью винтового кардана, выполненного в виде винтовых валов 21 с трапецеидальной резьбой, расположенных крестообразно, с возможностью линейного перемещения платформ друг относительно друга с помощью линейного привода 22 (фиг. 9). Нижняя платформа 19 блока обеспечения соосности 18 жестко закреплена на поворотном 32 или неподвижном основании, а на верхней подвижной платформе 20 установлена направляющая стойка 8, которая в верхней своей части шарнирно соединена со стаканом пусковой трубой 1.
Установка верхней платформы 20 относительно нижней платформы 19 с возможностью смещения и шарнирное соединение верхней платформы 20 и направляющей стойки 8 с пусковой трубой 1 обеспечивают изменение угла наклона оси направляющей стойки 8, заряжающей балки 5 и оси каретки подачи 6 с прибором 11 (фиг. 10). При обжатии прочного корпуса 2 подводной лодки может происходить отклонение от вертикали продольной оси пусковой трубы 12 и от оси каретки подачи 6 на некоторый угол. Тогда, смещением линейным приводом верхней подвижной платформы 20 относительно нижней 19, направляющую стойку 8 отклоняют на угол расхождения осей пусковой трубы 1 и каретки подачи 6 для восстановления их соосности. Линейный привод 22 может быть выполнен в виде шагового электродвигателя и системы управления в виде следящего двигателя или в виде гидравлического двигателя и системы управления со ступенями регулировки.
Механизмы пусковой установки и устройства перезарядки снабжены сигнализаторами их положения и подключены к автоматизированной системе управления 14 (не показано). Сигнализаторы положения механизмов могут быть выполнены в виде соответствующих датчиков положения, которые связаны с автоматизированной системой управления 14 (не показано). Работой механизмов пусковой установки, в частности, верхней 3, нижней 4 крышек пусковой трубы 1, устройства перезарядки, приводами направляющей стойки 8, заряжающей балки 5, каретки подачи 6 прибора 11, поворотным основанием 32, управляют автоматически с пульта единой автоматизированной системы управления 14 по заранее предусмотренному взаимоувязанному алгоритму.
Пример исполнения 1. Устройство перезарядки пусковой установки подводной лодки с линейным расположением двух силовых рам 9 с горизонтально ориентированными ячейками 10 для хранения соосных с ними приборов 11 (фиг. 3 и фиг. 4). Заряжающая балка 5 устройства перезарядки по первому исполнению установлена на направляющей стойке 8 с двумя степенями свободы, а именно, с возможностью поворота в вертикальной плоскости на угол до 90° в разные стороны от вертикальной оси и с возможностью вертикального линейного перемещения по направляющей стойке 8. Направляющая стойка 8 установлена неподвижно. Направляющая стойка выполнена в виде четырех неподвижных вертикальных направляющих балок 23, установленных попарно. В устройстве перезарядки установлена две силовые рамы 9, расположенные продольно-оппозитно, при этом продольные оси 13 ячеек 10 обеих силовых рам 9 перпендикулярны продольной оси 12 пусковой трубы 1 и расположены с ней в одной вертикальной плоскости.
По первому исполнению средство вертикального линейного перемещения горизонтальной поворотной оси 7 и заряжающей балки 5 с кареткой подачи 6 выполнено в виде двух подвижных несущих кареток 24, установленных на четырех вертикальных направляющих 23 с возможностью вертикального линейного перемещения несущих кареток 24 по вертикальным направляющим балкам 23. Вертикальные направляющие балки 23 установлены на неподвижном основании в прочном корпусе 2. В движение несущие каретки 24 приводят приводом 17 вертикального перемещения с приводным двигателем, который через червячный редуктор 25 передает вращение на приводную шестерню 27, которая приводит в движение цепь 26, соединенную непосредственно с несущей кареткой 24. Для синхронизации движения несущих кареток 24 приводные шестерни 27 соединены друг с другом валом 28 (фиг. 3 и фиг. 11, б).
На заряжающей балке 5 закреплена силовая решетка 29, которая выполнена в виде колец или цилиндрической решетки. Силовая решетка 29 удерживает прибор 11 от заваливания в вертикальном положении, и служит направляющей при заряжании прибора 11 в пусковую трубу 1, удерживая прибор 11 при перемещении из выбранной ячейки 10 на заряжающую балку 5. Несущие каретки 24 соединены с силовой решеткой 29 парой осей 7, вокруг которых происходит поворот заряжающей балки 5 с кареткой подачи 6 в вертикальной плоскости посредством привода кантования 16, выполненным в виде пары приводных двигателей 15, которые соединены с горизонтальной осью 7 посредством пары червячных редукторов 25. Вращение приводных двигателей 15 синхронизировано посредством того, что они вращают единый жесткий вал 28. В качестве приводного двигателя может быть установлен гидромотор 15, в частности, аксиально-поршневой гидродвигатель с перекрытыми входом и выходом.
Привод кантования 16, вращающий горизонтальную поворотную ось 7, на которой закреплена заряжающая балка 5 с кареткой подачи 6, выполнен, например, в виде гидромотора 15 с редуктором 25 (фиг. 11, б). Привод кантования 16 обеспечивает поворот заряжающей балки 5 в горизонтальное положение поворотом на 90° в разные стороны от вертикального положения заряжания и позволяет выбрать прибор 11 из правой продольно установленной силовой рамы 9 или из левой. Реализуют такую работу гидромотором 15, который обеспечивает разворот заряжающей балки 5 от 0 до 180° от горизонтальной оси, а вертикальное ее положение на оси заряжания соответствует повороту привода 16 на 90° от горизонтальной оси. Гидромотором 15 удерживают заряжающую балку 5 с прибором 11 в ее горизонтальном и в вертикальном положениях от проворота.
Направляющие балки 23 снабжены стопорами 38, которые позволяют несущим кареткам 24 остановиться напротив каждой ячейки 10. Каждый стопор 38 выполнен в виде гидроцилиндра, размещенного на направляющих балках 23, шток которого в выдвинутом положении механически препятствует движению каретки 24. (не показано)
Привод каретки подачи 6 выполнен в виде гидроцилиндра (не показано). Конструктивно каретка подачи 6 выполнена аналогично прототипу. Взаимодействие каретки подачи 6 с прибором 11 может быть осуществлено путем зацепления. Механизм зацепления прибора 11 выполнен в виде выдвижных упорных штырей из выступов в каретке подачи 6 и соответствующих пазов в хвостовой части прибора 11 (не показано). Выступ каретки подачи 6 попадает в паз прибора 11, из выступа выдвигают упорные штыри и стопорят их в выдвинутом положении, что приводит к сцеплению каретки подачи 6 и прибора 11, обеспечивающее возможность перемещения прибора 11 как в горизонтальном, так и в вертикальном положении заряжающей балки 5.
Для упрощения передачи питания и сигналов управления к элементам, установленным на заряжающей балке 5 служит цепь подачи питания, состоящая из двух звеньев 31 и установленных на ней труб и кабелей питания. На прямых участках цепи подачи питания трубы и кабели жестко зафиксированы на ней, а в местах перелома - собраны в петли, при этом трубы гидравлики в этом месте соединены гибкими рукавными соединениями. С несущей каретки 24 к заряжающей балке 5 гидравлика также передается с помощью гибкого рукавного соединения, собранного в петлю (не показано). Для придания конструкции прочности в верхней части направляющие балки 23 соединены кольцом 37.
Блок обеспечения соосности 18 установлен по первому исполнению между неподвижным основанием и вертикальными направляющими балками 23. Нижняя платформа 19 блока 18 закреплена на неподвижном основании, а верхняя подвижная платформа 20 и установленные на ней направляющие балки 23 с заряжающей балкой 5 шарнирно соединены со стаканом пусковой трубой 1. Шарнирное соединение может быть выполнено, например, в виде шарнирного подвижного поршня 36, перемещающегося в цилиндре, прикрепленном к вварочному стакану пусковой установки.
Пусковая установка с устройством перезарядки по первому исполнению работает следующим образом. Рассмотрим работу устройства при зарядке прибором 11 из нижней ячейки 10 условно левой силовой рамы 9 (фиг. 3). В исходном положении заряжающая балка 5 находится в вертикальном положении заряжания, а каретка подачи 6 в верхнем положении соосно оси 12 пусковой трубы 1 (фиг. 12, а, б).
При подготовке к стрельбе в зависимости от типа решаемой задачи автоматизированная система управления 14 выбирает прибор 11 из номенклатуры загруженных в силовую раму 9. Например, поступает команда на загрузку в пусковую трубу 1 прибора 11 из нижней горизонтально ориентированной ячейки 10 условно левой силовой рамы 9. Заряжающую балку 5 подводят приводом 17 к положению для кантования на ось кантования. Ось кантования - это положение вертикальной или горизонтальной заряжающей балки 5 на направляющей стойке 8, при котором возможен поворот заряжающей балки 5 в вертикальной плоскости (не показано). На оси кантования заряжающую балку 5 поворачивают приводом 16 на 90° от вертикальной оси в сторону выбранной ячейки 10 силовой рамы 9 в горизонтальное положение, кареткой подачи 6 к выбранному прибору 11. Затем заряжающую балку 5 опускают приводом 17 вертикально вниз к нижней ячейки 10 до совмещения горизонтальных продольных осей выбранного прибора 11 и выбранной нижней ячейки 10 и каретки подачи 6 до обеспечения их соосности.
По горизонтальной заряжающей балке 5 каретку подачи 6 приводом подают вперед до сцепления выдвижными упорными штырями с пазами выбранного прибора 11 и отключают привод стопора прибора 11. Каретку подачи 6 отводят приводом назад вместе с прибором 11 на полный ход до упора, при этом прибор 11 размещают в силовой решетке 29. Горизонтальную заряжающую балку 5 с прибором 11 поднимают вверх на ось кантования, на которой возможно осуществить ее обратный разворот в вертикальное положение заряжания, с размещением каретки подачи 6 в нижней части прибора 11. С помощью привода нижней крышки 4 производят открывание нижней крышки 4 пусковой трубы 1. Кареткой подачи 6 поднимают прибор 11 вверх и загружают его в пусковую трубу 1 до срабатывания стопора 30 внутри пусковой трубы 1, расцепляют каретку подачи 6 и прибор 11, каретку подачи 6 отводят в исходное положение, закрывают нижнюю крышку 4 пусковой трубы 1. Пусковая установка готова к стрельбе. После стрельбы, пусковая установка готова к повторению цикла работы.
Если в момент нахождения прибора 11 в вертикальном положении заряжания от автоматизированной системы управления 14 поступил сигнал о расхождении оси пусковой трубы 1 и оси каретки подачи 6 прибора 11, срабатывает блок обеспечения соосности 18 и соосность указанных осей автоматически восстанавливают приводами 22.
Аналогична работа устройства при выборе прибора 11 из верхней ячейки 10 условно левой силовой рамы 9 (фиг. 3). Перед поворотом заряжающей балки 5 с прибором 11 в вертикальное положение, необходимо ее опускание в вертикальном направлении вниз на ось кантования.
Особенность работы при повороте заряжающей балки 5 против часовой стрелки от положения заряжания, т.е. к условно правой силовой раме, состоит в том, что каретка подачи 6 оказывается в рабочем положении под заряжающей балкой 5, в перевернутом виде (фиг. 12, в). Каретку подачи 6 также сцепляют с прибором 11, после чего перемещают его вдоль горизонтальной заряжающей балки 5, удерживая переднюю часть прибора 11 на весу кареткой подачи 6. При этом сначала выбранный прибор 11 имеет опору на ячейке 10, а затем при перемещении в силовую решетку 29, прибор 11 удерживают ее направляющими вплоть до заряжания в пусковую трубу 1.
Также как в прототипе, в пусковой установке сохраняется обратная функция разгрузки приборов 11 из пусковой трубы 1 в силовые рамы 9 устройства перезарядки, которая теперь также полностью автоматизирована, т.к. все используемые пусковой установкой приборы 11 хранятся в силовых рамах 9, а не на дополнительном стеллаже. При этом, при открытой нижней крышке 4 пусковой трубы 1, каретку подачи 6 сцепляют с прибором 11, расцепляют стопор 30 пусковой трубы 1, опускают прибор 11 вдоль заряжающей балки 5, переворачивают на оси кантования, затем опускают или поднимают заряжающую балку 5 с прибором 11 в горизонтальном положении к выбранной ячейке 10 силовой рамы 9 до достижения соосности выбранной ячейки 10 и каретки подачи 6 заряжающей балки 5, после чего кареткой подачи 6 разгружают прибор 11 в выбранную ячейку 10 и стопорят его в ней.
Пример исполнения 2 (не показано). Устройство перезарядки пусковой установки подводной лодки с одной силовой рамой 9 с горизонтально ориентированными ячейками 10 для хранения соосных с ними приборов 11. Заряжающая балка 5 устройства перезарядки по второму исполнению установлена на направляющей стойке 8 с двумя степенями свободы. Направляющая стойка 8 выполнена в виде одной вертикальной направляющей балки, установленной неподвижно. Продольные оси ячеек 10 одной силовой рамы 9 перпендикулярны продольной оси пусковой трубы 1 и расположены с ней в одной вертикальной плоскости. Привод кантования 16 выполнен в виде гидроцилиндра, который обеспечивает поворот на 90° в одну сторону от вертикальной оси, блок обеспечения соосности 18 установлен между неподвижным основанием и вертикальной направляющей балкой. Работает устройство аналогично варианту 1 с условно левой силовой рамой 9 (фиг. 3).
Пример исполнения 3 (фиг. 5 - фиг. 7). Устройство перезарядки пусковой установки подводной лодки с V-образным расположением двух силовых рам 9 с горизонтально ориентированными ячейками 10 для приборов 11. Заряжающая балка 5 устройства перезарядки по третьему исполнению установлена на направляющей стойке 8 с тремя степенями свободы, а именно, с возможностью ее поворота в вертикальной плоскости на угол до 90° в одну сторону от вертикальной оси относительно горизонтальной поворотной оси 7, с возможностью ее вертикального линейного перемещения и с возможностью ее поворота в горизонтальной плоскости относительно вертикальной оси поворота 40 на фиксированный угол. Направляющая стойка 8 установлена с возможностью поворота в горизонтальной плоскости относительно вертикальной оси поворота 40. Направляющая стойка выполнена в виде одной вертикальной направляющей балки 39, установленной на поворотном основании 32 с приводом поворота 35 в горизонтальной плоскости.
В случае силовых рам 9, установленных V-образно, горизонтально ориентированные ячейки 10, как минимум, одной силовой рамы 9, установлены параллельно заряжающей балке 5 в горизонтальном ее положении или под углом к ней (фиг. 13). Для взаимодействия прибора в ячейке и каретки подачи прибора силовые рамы 9 установлены относительно пусковой трубы таким образом, что продольные оси горизонтально ориентированных ячеек любой силовой рамы 9 перпендикулярны продольной оси 12 пусковой трубы 1 и вертикальной оси поворота 40 направляющей стойки 8 и расположены в одной вертикальной плоскости с вертикальной осью поворота 40 направляющей стойки 8. Причем продольные оси 13 ячеек 10, как минимум, одной силовой рамы 9, перпендикулярны продольной оси 12 пусковой трубы 1, оси каретки подачи 6 прибора 11, вертикальной оси поворота 40 и расположены с ней в одной исходной вертикальной плоскости.
В случае двух силовых рам 9, установленных V-образно, продольные оси ячеек 13 первой силовой рамы 9 перпендикулярны продольной оси 12 пусковой трубы 1 и вертикальной оси поворота 40 направляющей балки 8 и расположены с ними в одной исходной вертикальной плоскости (фиг. 3, вид сверху и фиг. 13). Продольные оси ячеек 13 второй силовой рамы 9 также перпендикулярны указанным осям, но расположены в одной вертикальной плоскости только с осью поворота 40 направляющей балки 39, и эта плоскость составляет фиксированный угол с исходной вертикальной плоскостью первой силовой рамы 9 (фиг. 2).
Более общий случай, когда в прочном корпусе 2 V-образно расположены, как минимум, две силовые рамы 9 (фиг. 2). Если V-образно установлено более двух силовых рам 9, то несколько вертикальных плоскостей, проходящих через ось поворота 40 направляющей стойки 8, составляют различные углы с исходной вертикальной плоскостью первой силовой рамы 9, проходящей также через продольную ось 12 пусковой трубы 1.
По третьему исполнению средство вертикального перемещения горизонтальной поворотной оси 7 и заряжающей балки 5 с кареткой подачи 6 выполнено в виде тележки 33, установленной с возможностью перемещения по вертикальной направляющей балке 39 в вертикальном направлении с помощью привода 17 вертикального перемещения. На тележке 33 шарнирно закреплена горизонтальная поворотная ось 7, на которой закреплена своей центральной частью заряжающая балка 5 с кареткой подачи 6.
Заряжающую балку 5 с кареткой подачи 6 поворачивают относительно горизонтальной поворотной оси 7 на 90° из вертикального ее положения в горизонтальное и обратно с помощью привода кантования 16. Привод кантования 16 более простого исполнения, чем в примере исполнения 1, при кантовании на 180°, т.к. кантование происходит только на 90°. Выполнен привод кантования 16, например, в виде гидроцилиндра (фиг. 11, а).
Приводом 17 тележки 33 заряжающую балку 5 с кареткой подачи 6 в горизонтальном ее положении перемещают в вертикальном направлении для выбора прибора 11 из горизонтально ориентированной ячейки 10, при этом ось каретки подачи 6 устанавливают соосно с продольной осью 13 выбранной ячейки 10 с прибором 11. На заряжающей балке 5 жестко закреплены два кольцевых держателях в виде, например, бугеля 34 - для удержания прибора 11.
Вертикальная направляющая балка 39 установлена на поворотном основании 32, которое реализует возможность поворота в горизонтальной плоскости заряжающей балки 5 с кареткой подачи 6. Поворотное основание 32 обеспечивает поворот заряжающей балки 5 с кареткой подачи 6 в горизонтальной плоскости на фиксированный угол к приборам 11 и ячейкам 10 второй силовой рамы 9, продольные оси 13 которых расположены под углом к осям ячеек 10 первой силовой рамы 9. Поворотное основание 32 установлено на неподвижном основании в прочном корпусе 2.
Поворот поворотного основания 32 обеспечивают приводом поворота, выполненным в виде зубчатой рейки, перемещаемой гидроцилиндром, и двух зубчатых колес, одно из которых установлено на поворотном основании, а другое на приводе поворота (не показано). Поворот зубчатого колеса привода поворота происходит за счет подачи гидравлики в одну из полостей гидроцилиндра, что приводит в движение зубчатую рейку, которая начинает вращать ось, на которой одето зубчатое колесо привода поворота. Зубчатое колесо привода поворота зацеплено с зубчатым колесом поворотного основания 32. При вращении зубчатого колеса привода поворота направляющая балка 39 вместе с заряжающей балкой 5 и кареткой подачи 6 начинают разворачиваться относительно оси поворота 40 на фиксированный угол к выбранной ячейке из второй силовой рамы (фиг. 2).
Блок обеспечения соосности 18 установлен между поворотным основанием 32 и направляющей балкой 39. Нижняя платформа 19 блока 18 жестко закреплена на поворотном основании 32, а верхняя подвижная платформа 20 и установленная на ней направляющая балка 39 с заряжающей балкой 5 шарнирно соединены с пусковой трубой 1.
Устройство по примеру исполнения 3 и 4 работает следующим образом. Привод кантования 16 обеспечивает поворот заряжающей балки 5 на оси кантования поворотом на 90° в одном направлении - по часовой стрелке или против часовой стрелке от исходного вертикального положения заряжания в сторону силовых рам 9, установленных с одной стороны V-образно под углом друг к другу (фиг. 6 и фиг. 8). При повороте на оси кантования в сторону выбранной ячейки 10 каретка подачи 6 всегда расположена над горизонтальной заряжающей балкой 5.
Работа устройства для первой силовой рамы 9, в которой продольные оси 13 ячеек 10 с приборами 11 параллельны оси заряжающей балки 5 в ее горизонтальном положении и расположены в одной вертикальной плоскости с продольной осью 12 пусковой трубы 1, осью поворота 40 и осью каретки подачи 6, аналогична описанной в примере исполнения 1 с условно левой силовой рамой 9. Поворот направляющей балки 39 на поворотном основании 32 при этом производить не требуется (фиг. 13). После поворота в горизонтальное положение на оси кантования, заряжающую балку 5 сразу устанавливают параллельно осям приборов 11 и ячеек 10 в первой силовой раме 9, после чего вертикальным перемещением заряжающей балки 5 каретку подачи 6 устанавливают соосно оси выбранной ячейки 10 с прибором или ячейки 10 из первой силовой рамы 9.
Особенность работы варианта 3 состоит в том, что при выборе прибора из второй силовой рамы 9 или из любой другой, расположенной под углом к первой, к работе добавляют поворот направляющей балки 39 в горизонтальной плоскости совместно с заряжающей балкой 5 и кареткой подачи 6 относительно вертикальной оси поворота 40 на фиксированный угол, равный углу между силовыми рамами 9 относительно оси поворота 40 (фиг. 6). Продольные оси 13 ячеек второй силовой рамы 9 расположены в одной вертикальной плоскости с осью поворота 40 направляющей балки 39, перпендикулярно оси 40.
При этом повороты заряжающей балки 5 с кареткой подачи 6 к выбранной ячейке 10 в вертикальной плоскости на оси кантования и в горизонтальной плоскости относительно поворотной оси 40 производят одновременно, а затем заряжающую балку 5 позиционируют по высоте до обеспечения соосности продольной оси 13 выбранного прибора 11 из второй силовой рамы 9 и каретки подачи 6. При этом продольная ось 13 выбранного прибора 11 расположена в одной вертикальной плоскости с осью поворота 40 и ось каретки подачи 6 прибора 11. Из этого положения заряжающую балку 5 с прибором 11 поднимают или опускают на ось кантования и поворачивают в вертикальное положение на оси кантования сначала в вертикальное положение, а затем обратным поворотом направляющей балки 39 в горизонтальной плоскости возвращают ее в соосное с пусковой трубой 1 положение для заряжания. Затем, при необходимости, проверяют и устанавливают соосность каретки подачи прибора и оси пусковой трубы 1 с помощью блока обеспечения соосности 18.
Пример исполнения 4 (фиг. 8). Расположение силовых рам 9 V-образное. Заряжающая балка 5 устройства перезарядки по четвертому исполнению установлена на направляющей стойке 8 с тремя степенями свободы и силовые рамы 9 аналогично примеру исполнения 3. Направляющая стойка 8 установлена с возможностью поворота в горизонтальной плоскости относительно вертикальной оси поворота 40. Направляющая стойка выполнена в виде вертикальных направляющих балок 23, установленных на поворотном основании с приводом поворота 35 в горизонтальной плоскости. Привод кантования 16 выполнен в виде гидроцилиндра аналогично примеру исполнения 3, который обеспечивает поворот на 90° в одну сторону от вертикальной оси, блок обеспечения соосности 18 установлен между поворотным основанием 32 и вертикальными направляющими балками 23. Направляющие балки 23 нижней своей частью закреплены на верхней подвижной платформе 20 блока обеспечения соосности 18, а верхней своей частью шарнирно соединены с пусковой трубой 1. Работает устройство аналогично варианту 3.
Таким образом, изобретение обеспечивает повышение надежности, повышение скорострельности и расширение функциональных возможностей пусковой установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2684342C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2684228C1 |
| КОМПЛЕКТ УСТРОЙСТВ И СПОСОБ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ВЕРТИКАЛЬНУЮ ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2021 |
|
RU2791779C2 |
| ТРАНСПОРТНО-ЗАРЯЖАЮЩАЯ МАШИНА | 2000 |
|
RU2194234C2 |
| Автоматизированная система загрузки ракет в самоходную пусковую установку подвижного берегового ракетного комплекса | 2019 |
|
RU2731296C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ЗАГРУЗКИ РАКЕТ В САМОХОДНУЮ ПУСКОВУЮ УСТАНОВКУ | 2014 |
|
RU2578917C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ЗАПУСКА РАКЕТ | 2004 |
|
RU2287127C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2000 |
|
RU2176610C1 |
| АВТОМАТ ЗАРЯЖАНИЯ ПУШКИ ТАНКА | 2015 |
|
RU2602005C1 |
| Способ доставки ракетных модулей ЗУР и транспортно-заряжающая машина с краноманипуляторной установкой для его осуществления | 2020 |
|
RU2767816C1 |
Изобретение относится к области подводного кораблестроения, а именно к пусковым установкам. Пусковая установка подводной лодки включает пусковую трубу, устройство перезарядки, включающее заряжающую балку, установленную перед нижней крышкой пусковой трубы, с соосной с пусковой трубой кареткой подачи прибора с приводом ее возвратно-поступательного линейного движения по заряжающей балке и средство хранения с ячейками для приборов, автоматизированную систему управления, механизмы, снабженные сигнализаторами их положения. Средство хранения устройства перезарядки выполнено в виде как минимум одной сборно-модульной силовой рамы с горизонтально ориентированными ячейками для хранения соосно размещаемых в них приборов. Заряжающая балка с кареткой подачи прибора установлена подвижно, как минимум с двумя степенями свободы, с возможностью поворота в вертикальной плоскости из вертикального положения в горизонтальное и обратно относительно подвижной в вертикальном направлении горизонтальной поворотной оси и с возможностью вертикального линейного перемещения заряжающей балки с кареткой подачи прибора по направляющей. Направляющая стойка установлена неподвижно или с возможностью поворота в горизонтальной плоскости относительно вертикальной оси поворота. Достигается повышение надежности пусковой установки, повышение скорострельности и расширение ее функциональных возможностей. 3 з.п. ф-лы, 13 ил.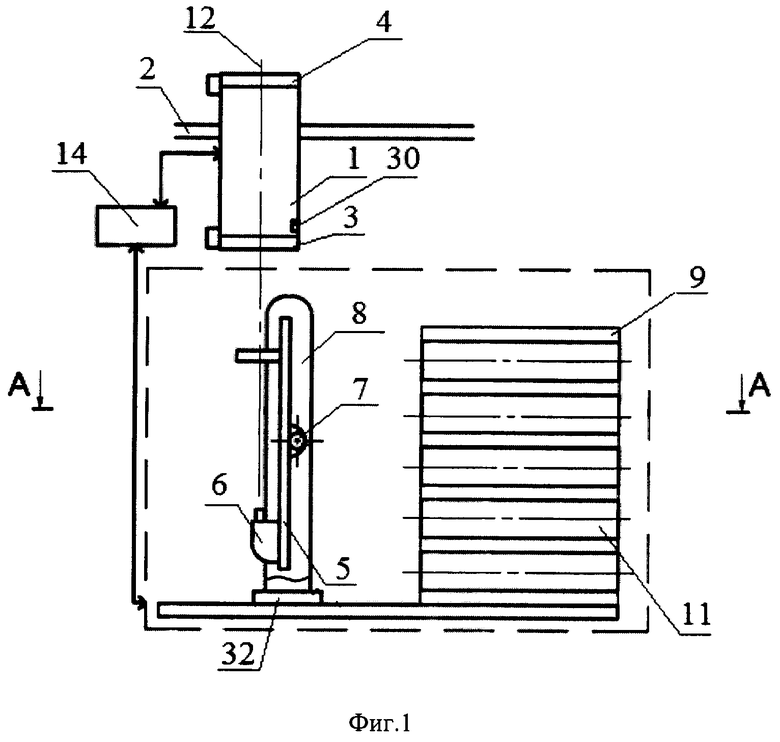
1. Пусковая установка подводной лодки, включающая пусковую трубу, установленную в прочном корпусе, со стопором прибора, с верхней и нижней крышками и их приводами, устройство перезарядки, включающее заряжающую балку, установленную перед нижней крышкой пусковой трубы, с соосной с пусковой трубой кареткой подачи прибора с приводом ее возвратно-поступательного линейного движения по заряжающей балке и средство хранения с ячейками для приборов, автоматизированную систему управления, механизмы, снабженные сигнализаторами их положения, отличающаяся тем, что средство хранения устройства перезарядки выполнено в виде как минимум одной сборно-модульной силовой рамы с горизонтально ориентированными ячейками для хранения соосно размещаемых в них приборов, расположенных в зоне взаимодействия с кареткой подачи прибора заряжающей балки, при этом заряжающая балка с кареткой подачи прибора установлена подвижно, как минимум с двумя степенями свободы, с возможностью поворота в вертикальной плоскости из вертикального положения в горизонтальное и обратно относительно подвижной в вертикальном направлении горизонтальной поворотной оси и с возможностью вертикального линейного перемещения заряжающей балки с кареткой подачи прибора по направляющей стойке, установленной неподвижно или с возможностью поворота в горизонтальной плоскости относительно вертикальной оси поворота, для перемещения каретки подачи с заряжающей балкой в соосное положение с выбранной горизонтально ориентированной ячейкой или ячейкой с прибором.
2. Пусковая установка по п.1, отличающаяся тем, что для взаимодействия прибора в ячейке и каретке подачи прибора силовые рамы установлены относительно заряжающей балки и каретки подачи прибора с возможностью обеспечения соосности каретки подачи прибора с продольной осью выбранной ячейки при горизонтальном положении заряжающей балки, а относительно пусковой трубы как минимум одна силовая рама установлена таким образом, что продольные оси ее горизонтально ориентированных ячеек перпендикулярны продольной оси пусковой трубы и расположены с ней в одной вертикальной плоскости.
3. Пусковая установка по п.1, отличающаяся тем, что направляющая стойка установлена на поворотном основании, а продольные оси горизонтально ориентированных ячеек любой силовой рамы перпендикулярны продольной оси пусковой трубы и вертикальной оси поворота направляющей стойки и расположены в одной вертикальной плоскости с вертикальной осью поворота направляющей стойки.
4. Пусковая установка по п.1, отличающаяся тем, что устройство перезарядки пусковой установки дополнительно снабжено блоком обеспечения соосности, выполненным в виде двух платформ, верхней и нижней, подвижно соединенных между собой с возможностью их линейного перемещения друг относительно друга, при этом нижняя платформа жестко закреплена на поворотном или неподвижном основании устройства перезарядки, а на верхней подвижной платформе установлена направляющая стойка, которая шарнирно соединена с пусковой трубой.
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2009 |
|
RU2412855C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2017 |
|
RU2648912C1 |
| US 6834608 B1, 28.12.2004 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2002 |
|
RU2290856C2 |

