Изобретение относится к авиационным технологиям, в частности к технологиям удаленного авиадиспетчерского наблюдения.
Уровень техники.
Большинство аэропортов имеют малую интенсивностью полетов: например, в более чем 80% российских аэропортов выполняется менее 10 взлетно-посадочных операций в сутки. Диспетчерская служба в таких аэропортах нерентабельна, поскольку даже в крупных авиаузлах свыше 20% стоимости обслуживания авиапассажира приходится на диспетчерскую поддержку. Это обстоятельство вывело проблему диспетчерского обслуживания небольших аэропортов в зону повышенного внимания организаторов воздушного движения во всем мире. Особенно остро вопрос стоит для российской Госкорпорации по организации воздушного движения с учетом тренда на возрождение сети малых аэропортов в РФ.
Известны коммерчески доступные решения данной проблемы, которые предполагают реализацию концепции удаленной диспетчерской вышки (УДВ), уже функционирующей в нескольких зарубежных аэропортах: на летном поле аэродрома устанавливается мачта с комплектом обеспечивающих полный круговой обзор видеокамер высокого разрешения; видеосигналы камер передаются в удаленный центр управления воздушным движением (УЦУВД), где воспроизводятся на имитирующих окна крупноразмерных дисплеях (видеопанорама), создавая у диспетчеров в УЦУВД ощущение работы на реальной диспетчерской вышке удаленного аэродрома. Примерами видеопанорамной УДВ являются системы удаленного диспетчерского наблюдения шведской компании SAAB и российской «АО Концерн МАНС».
Недостатками видеопанорамной УДВ являются
- необходимость наличия высоконадежного канала связи между УДВ и УЦУВД с большой пропускной способностью для передачи видеосигналов от более десятка видеокамер высокого разрешения, что делает такое решение либо физически невозможным, либо нерентабельным для больших расстояний, характерных в России (до нескольких тысяч километров в Арктике и на Крайнем Севере);
- зависимость видимости с УДВ от погодных условий и времени суток;
- невозможность перемещения точки наблюдения с УДВ;
- высокая стоимость с учетом стоимости упомянутого высоконадежного канала связи большой пропускной способности.
От указанных недостатков свободны проекты УДВ с воспроизведением воздушной обстановки над удаленным аэропортом и самого удаленного аэропорта посредством 3D-моделирования в виртуальной реальности (BP) - виртуальная УДВ. Однако до настоящего времени практических реализаций этой концепции не существует, что в первую очередь обусловлено трудностями позиционирования моделей воздушных судов (ВС) в виртуальной среде с приемлемыми задержками времени относительно положения реальных ВС.
Становление систем автоматического зависимого наблюдения (АЗН, англ. ADS), вырабатывающей информацию по ВС, включая их координаты, полученные с помощью средств спутниковой навигации, меняет ситуацию. Наличие аппаратуры АЗН на борту большинства ВС (обязательна в ЕС с 2015 г., в США с 2020 г. в Австралии с 2013 г., по данным НПП ЦРТС, разработчика аппаратуры АЗН, к 2018 г. в воздушном пространстве РФ около 90% ВС оборудовано АЗН) и высокая (по сравнению со вторичной радиолокацией) частота определения координат ВС в АЗН делает возможным позиционирование моделей ВС в виртуальной УДВ. Виртуальная УДВ предполагает незначительный объем передаваемой между УДВ и УЦУВД информации (координаты ВС и один канал голосового обмена между диспетчером и пилотом), что делает рентабельным использование спутниковой связи вместо наземной линии большой пропускной способности для передачи видеосигналов, которая требуется в видеопанорамной УДВ.
Проблемными моментами при использовании АЗН-координат ВС в виртуальной УДВ являются эпизодически возникающая неточность координат, обусловленная погрешностями систем спутниковой навигации и перерывы в следовании информационных пакетов АЗН, связанные с нарушениями работы каналов связи разной природы, в том числе обусловленные помехами в радиоканалах и сбоями в работе серверов цифровых сетей. Сочетание этих двух факторов - одновременно неточность и неполнота АЗН-информации - делает неэффективным применение распространенных инструментов устранения неточности данных (таких, как фильтр Калмана), которые требуют регулярности и стационарности потока входных данных. Кроме того, при возобновлении поступления информационных пакетов АЗН после прерывания часто возникает ситуация недостоверности данных АЗН из-за указанных нарушений работы каналов связи. Как результат, позиционирование виртуальных моделей ВС становится нестабильным, что можно наблюдать, например, на известном онлайн-сервисе АЗН-отслеживания ВС www.flightradar24.com. Такое нестабильное позиционирование ВС делает невозможным его использование для целей авиадиспетчерского наблюдения. Сочетание неточности и неполноты в разной мере касается любых иных источников навигационной информации (ИНИ).
Технической задачей предлагаемого изобретения является создание системы формирования координат воздушного судна при одновременно неполной и неточной навигационной информации, обеспечивающего стабильное позиционирование моделей ВС в виртуальной УДВ. При этом в качестве ИНИ наряду с АЗН могут использоваться любые существующие и перспективные системы, в частности оптико-электронные многоспектральные датчики, первичные радиолокаторы, виброакустические системы контроля летного поля, вторичные радиолокаторы, системы автоматического распознавания объектов на основе анализа видеопотока камер наблюдения и тепловизоров и другие.
Раскрытие изобретения.
Технический результат предлагаемого изобретения состоит в устранении нестабильности позиционирования моделей ВС в виртуальной УДВ по данным ИНИ, характеризуемых неполнотой и неточностью.
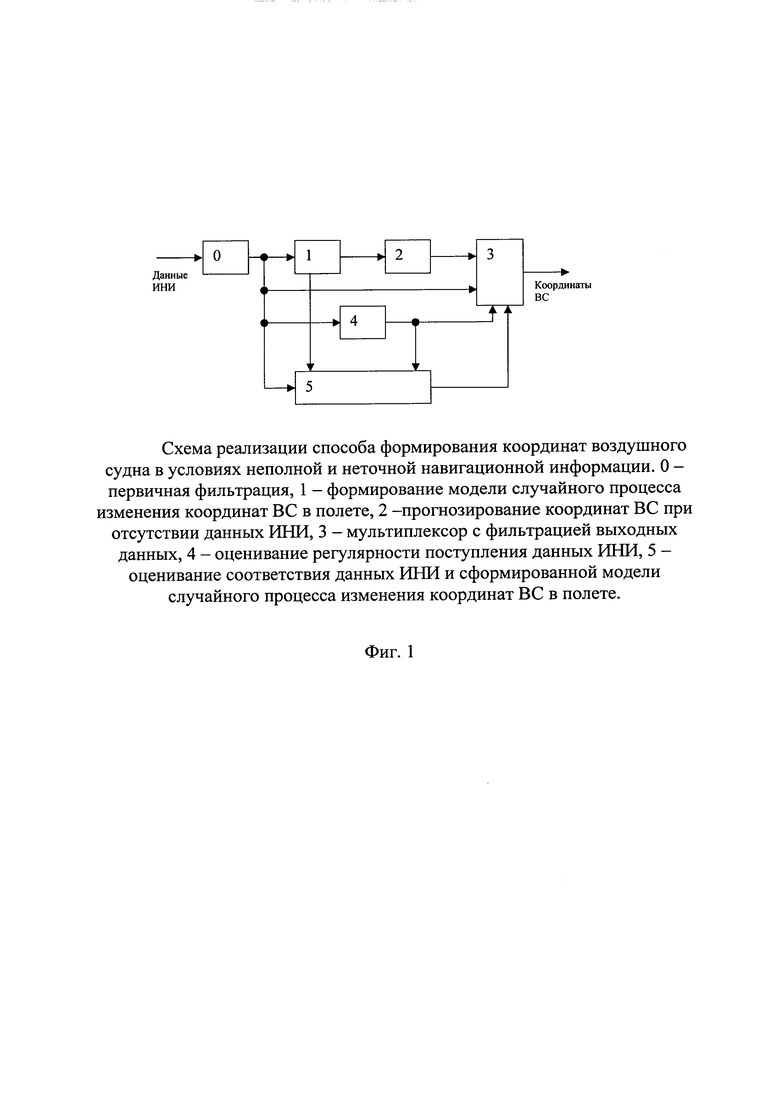
Указанный технический результат достигается тем, что в последовательность действий по формированию координат ВС в виртуальной УДВ по данным ИНИ (фиг. 1) включаются первичная фильтрация (блок 0), формирование модели случайного процесса изменения координат ВС (блок 1), прогнозирование координат ВС при отсутствии данных ИНИ (блок 2), оценивание регулярности поступления данных ИНИ (блок 4) и оценивание соответствия данных ИНИ и сформированной модели случайного процесса изменения координат ВС при возобновлении их поступления после прерывания (блок 5).
Фиг. 1 - схема реализации системы формирования координат воздушного судна в условиях неполной и неточной навигационной информации.
Осуществление изобретения.
Осуществление предлагаемой системы формирования координат воздушного судна в условиях неполной и неточной навигационной информации заключается в следующем.
Система подразумевает использование в процессорном устройстве, генерирующем сцену BP в виртуальной УДВ, аппаратно или программно реализованного модуля, который реализует обработку поступающих навигационных данных ИНИ в соответствии со схемой, показанной на фиг. 1.
Обработка заключается в следующем:
Поступающие данные ИНИ подвергаются первичной фильтрации (блок 0), устраняющей устаревшие или заведомо ложные данные, появление которых обусловлена сбоями в системах ИНИ и помехами в каналах обмена. После первичной фильтрации по данным ИНИ формируется модель случайного процесса изменения координат ВС (блок 1). На основании этой модели осуществляется прогнозирование координат ВС (блок 2). Определение факта поступления или прерывания поступления данных ИНИ осуществляется блоком оценивания регулярности поступления данных ИНИ (блок 4), который участвует в управлении мультиплексором (блок 3): при регулярном поступлении данных ИНИ в качестве координат ВС в виртуальной УДВ используются таковые, при прерывании поступления данных ИНИ в качестве координат ВС в виртуальной УДВ используются прогнозируемые координаты, вырабатываемые блоком 2. При возобновлении поступления данных АЗН после прерывания осуществляется оценивание соответствия данных АЗН и сформированной модели случайного процесса изменения координат ВС (блок 5). Блок 5 наряду с блоком 4 участвует в управлении мультиплексором 3: при выявлении соответствия данных ИНИ и сформированной модели случайного процесса изменения координат ВС в качестве координат ВС в виртуальной УДВ используются данные ИНИ, в противном случае продолжается использование в качестве координат ВС прогнозируемых координат, вырабатываемых блоком 2. Блок 5 осуществляет оценивание соответствия поступающих данных АЗН и сформированной модели случайного процесса изменения координат ВС регулярно.
Схема, приведенная на фиг. 1, обеспечивает стабильность потока данных о координатах ВС во времени и стационарность случайного процесса изменения координат виртуальных моделей ВС, что позволяет осуществлять последующую фильтрацию выходных данных мультиплексора 3 известными методами (например, рекурсивный фильтр Калмана). Необходимым условием работы схемы, приведенной на фиг. 1, является корректность поступающих данных ИНИ в период формирования блоком 1 модели случайного процесса изменения координат ВС, поэтому при формировании модели предусматривается проверка навигационных данных ИНИ на корректность с использованием информации пакета АЗН о типе ВС. При отрицательном результате проверки виртуальная модель ВС маркируется как модель с недостоверными координатами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического формирования пути и скорости движения роботизированного колесного подвижного объекта | 2023 |
|
RU2816411C1 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭКСПЛУАТАЦИЕЙ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОГО ПОЛЕТА С ВЫЯВЛЕНИЕМ СЛУЧАЕВ НЕСАНКЦИОНИРОВАННОГО ИЗМЕНЕНИЯ ТРАФИКА ПОЛЕТА | 2017 |
|
RU2662611C1 |
| СПОСОБ ОБУЧЕНИЯ СОТРУДНИКОВ СЛУЖБЫ АВИАЦИОННОЙ БЕЗОПАСНОСТИ С ПРИМЕНЕНИЕМ СИСТЕМЫ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ | 2012 |
|
RU2528457C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| КОМПЛЕКС БОРТОВЫХ СРЕДСТВ ЦИФРОВОЙ СВЯЗИ | 2006 |
|
RU2319304C2 |
Система формирования координат воздушного судна в условиях неполной и неточной навигационной информации содержит блок первичной фильтрации, блок формирования модели случайного процесса изменения координат воздушного судна, блок прогнозирования координат воздушного судна при отсутствии данных источников навигационной информации, мультиплексор, блок оценивания регулярности поступления данных источников навигационной информации, блок оценивания соответствия данных источников навигационной информации и сформированной модели случайного процесса изменения координат воздушного судна в полете, соединенные определенным образом. 1 ил.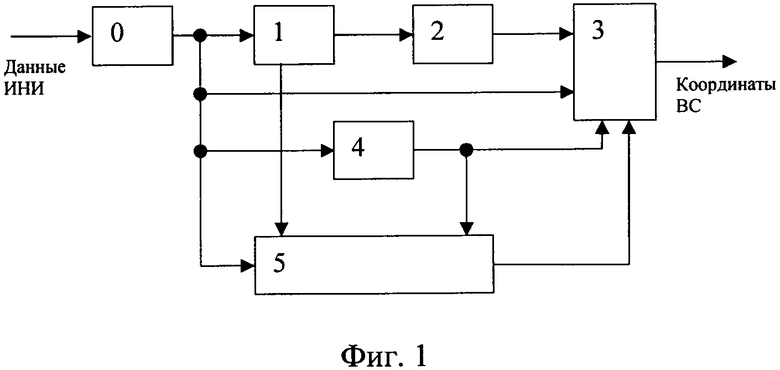
Система формирования координат воздушного судна в условиях неполной и неточной навигационной информации, отличающаяся тем, что при обработке данных источников навигационной информации используются блок первичной фильтрации, выход которого соединен с информационными входами блока формирования модели случайного процесса изменения координат воздушного судна, блока оценивания регулярности поступления данных источников навигационной информации, первым информационным входом блока оценивания соответствия данных источников навигационной информации и сформированной модели случайного процесса изменения координат воздушного судна и первым информационным входом мультиплексора; при этом первый выход блока формирования модели случайного процесса изменения координат воздушного судна соединен с входом блока прогнозирования координат воздушного судна при отсутствии данных источников навигационной информации, выход которого соединен со вторым информационным входом мультиплексора; второй выход блока формирования модели случайного процесса изменения координат воздушного судна в полете соединен со вторым информационным входом блока оценивания соответствия данных источников навигационной информации и сформированной модели случайного процесса изменения координат воздушного судна; выход блока оценивания регулярности поступления данных источников навигационной информации соединен с управляющим входом блока оценивания соответствия данных источников навигационной информации и сформированной модели случайного процесса изменения координат воздушного судна, а также с первым управляющим входом мультиплексора; выход блока оценивания соответствия данных источников навигационной информации и сформированной модели случайного процесса изменения координат воздушного судна соединен со вторым управляющим входом мультиплексора.
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ МОБИЛЬНЫХ ОБЪЕКТОВ НА АЭРОДРОМЕ | 2014 |
|
RU2560220C1 |
| СПОСОБ ПОЛУЧЕНИЯ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ (ЛА) УЛУЧШЕННОГО ИЗОБРАЖЕНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2015 |
|
RU2591029C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНОГО МОДЕЛИРОВАНИЯ С ВОЗМОЖНОСТЬЮ ВРЕМЕННОГО СДВИГА | 2008 |
|
RU2481612C2 |
| EP 3006899 A1, 13.04.2016 | |||
| US 8577607 B2, 05.11.2013. | |||

