Изобретение относится к области технологии управления роботизированными подвижными объектами в части формирования пути и скорости их движения по маршруту между начальной и конечной его точками, в частности при автоматическом формировании пути и скорости движения роботизированного колесного подвижного объекта (РКПО), предназначенного для перевозки грузов между воздушным судном на его стоянке и терминалом аэропорта.
Известен способ построения пути РТС - роботизированного транспортного средства (заявка KR 20150086065 А, опубл. 27.07.2015, первый аналог). Способ включает в себя представление глобального пути движения РТС на дороге в виде последовательности опорных точек, отслеживание в этих точках текущего положения РТС, формирование при обнаружении препятствия дополнительного пути РТС генерированием множества возможных альтернативных путей, эквидистантных глобальному пути, в пределах ширины дороги, выбор из них оптимального пути, огибающего препятствие, в виде дополнительной последовательности опорных точек, продолжение движения по этому сгенерированному пути.
Недостатком этого способа является то, что он предполагает для исключения столкновений РТС с препятствиями на дороге формирование дополнительного пути их объезда РТС, что часто нереализуемо на аэродроме по условиям обеспечения безопасности в рамках аэродромной топографии при наличии не только статичных, но и движущихся по различным полосам и направлениям динамичных препятствий. На аэродроме необходимо выбирать альтернативный путь движения, соответствующий разметке поверхности с установленными путями движения техники, а также позиционированию и скоростям участников движения. Кроме того, в этом способе отсутствуют конкретные рекомендации по выбору оптимальной скорости движения РТС по формируемому пути.
Известен также способ автоматического формирования гладких траекторий движения мобильного робота в неизвестном окружении (патент RU 2661964 C2, опубл. 23.07.2018. Бюл. №21, второй аналог). Способ включает определение местоположения робота, обработку информации от бортовых дальномеров для определения расстояния до возможных препятствий и формирование траектории движения робота с учетом обнаруженных препятствий, причем траекторию движения робота формируют в виде гладкой кривой, проходящей по заранее заданной последовательности целевых точек, с обеспечением ее расположения от обнаруженных препятствий на расстоянии не меньшем, чем допустимое. При этом осуществляют непрерывную коррекцию траектории с учетом положения дополнительных целевых точек, координаты которых определяют на основе данных о вновь обнаруженных препятствиях, которые получают от бортовых дальномеров.
Недостатком этого способа применительно к его использованию для автоматического формирования пути движения робота в рамках аэродромной топографии является отсутствие возможности построения и использования гладких траекторий объезда роботом препятствий при движении только по регламентированным путям. Кроме того, применение бортовых дальномеров для определения местоположения препятствий на достаточно удаленном расстоянии от робота в условиях разветвленности регламентированных путей является неэффективным. В рассматриваемом способе отсутствуют также конкретные рекомендации по выбору скорости движения робота.
Наиболее близким к заявляемому способу является способ создания трека пути автономного движения подвижного объекта и способ осуществления автономного движения подвижного объекта по треку пути движения (патент RU 2691679 С1, МПК G01C 22/00 G01C 21/00 G05D1/12, опубл. 2019 г., прототип). В части формирования пути автономного движения подвижного объекта в прототипе предварительно прокладывают путь (на основе обработки предварительно получаемой информации - аэрофотометрической, картографической и др.) в виде множества последовательных отрезков пути, каждый из которых соединяет пару последовательных опорных точек, определяют в каждой опорной точке набор параметров движения объекта на последующем участке пути (с необходимой коррекцией этого участка), для которого эта точка является начальной, реализуют с помощью навигационно-управляющего комплекса (НУК) траекторное управление движением объекта из начальной в конечную точки пути. Предлагаемый в прототипе способ, как указано в патенте, может быть использован для формирования пути автономного движения разнообразных подвижных объектов - наземных, водных, воздушных. Однако, этот способ не может быть непосредственно использован применительно к формированию пути и скорости автономного движения каждого из этих объектов, в частности автоматического формирования пути и скорости движения РКПО для перевозки грузов в специфических условиях инфраструктуры аэродрома. Это связано с тем, что пути движения подвижного объекта по аэродрому регламентированы, что ограничивает возможности коррекции участков пути по способу - прототипу, в частности с объездом статичных и динамичных препятствий. Кроме того, такой объезд крайне нежелателен из соображений обеспечения безопасности (уменьшения риска столкновений подвижного объекта с препятствиями). Нежелательно и встречное движение на аэродроме подвижного объекта и препятствий по эквидистантным полосам двухполосного пути с большой относительной скоростью. В прототипе не конкретизирован также алгоритм выбора скорости автономного движения подвижного объекта по аэродрому, обеспечивающей комплексную минимизацию времени его движения из начальной точки в конечную и энергозатрат на это движение.
Таким образом, можно сделать вывод, что известные способы автоматического формирования пути автономного движения подвижных объектов, в частности РКПО, в специфических условиях аэродрома, выражающихся в регламентировании возможных путей движения, в жесткой минимизации риска столкновения РКПО с другими участниками движения, либо не реализуемы, либо не обеспечивают выполнение требований по безопасности. Кроме того, в известных способах не нашло конкретное отражение решение задачи оптимизации скорости РКПО на пути его движения от стоянки воздушного судна к терминалу аэропорта (и в обратном направлении).
Основным Техническим результатом предложения при его реализации является возможность формирования пути движения РКПО с грузом, обеспечивающего высокий уровень безопасности этого движения по аэродрому, на котором разметкой поверхности регламентированы пути движения техники. Это достигается за счет минимизации риска столкновений РКПО со статичными и динамичными препятствиями на аэродроме. Этот риск особенно велик при встречном движении РКПО и препятствия по эквидистантным полосам двухполосного пути. Дополнительным техническим результатом предложения является оптимизация величины скорости движения РКПО по выбранному пути, при которой комплексно минимизируются временные и энергетические затраты на это движение.
Указанные технические результаты достигаются тем, что в способе автоматического формирования пути и скорости движения РКПО для перевозки грузов между воздушным судном на его стоянке и терминалом аэропорта при наличии динамичных и статичных препятствий на размеченной поверхности покрытия аэродрома с установленными двухполосными путями движения, оснащенного НУК, включающим навигационный блок с датчиками навигационных параметров РКПО, блок управления движением РКПО и вычислитель, заключающемся в представлении пути движения в виде совокупности участков, каждый из которых соединяет пару последовательных опорных точек, определении в каждой опорной точке скорости последующего движения РКПО, реализации движения РКПО из начальной в конечную точки пути с помощью блока управления движением, при этом, в память вычислителя НУК РКПО размещают информацию о возможных путях и соответствующих им траекториях движения РКПО по аэродрому, в каждой опорной точке вводят в вычислитель:
- данные, поступающие из навигационного блока и определяющие позиционирование и скорость РКПО, а также данные, поступающие от радиомаяков, установленных на статичных и динамичных препятствиях и передающих информацию о позиционировании статичных препятствий, а также о позиционировании и скоростях динамичных препятствий, при этом РКПО и динамичные препятствия рассматриваются только как участники правостороннего движения;
- данные о весовых и габаритных характеристиках груза РКПО, при этом РКПО выполнен с возможностью взвешивания размещаемого на нем груза;
- данные о скорости и направлении ветра, а также о погодном состоянии покрытия на аэродроме, получаемые от диспетчерской службы аэропорта посредством приемных устройств, размещенных на борту РКПО,
обрабатывают в вычислителе НУК данные о позиционировании и скорости РКПО, о позиционировании статичных препятствий, о позиционировании и скорости динамичных препятствий, о весовых и габаритных характеристиках груза РКПО, о скорости и направлении ветра, о погодном состоянии покрытия на аэродроме,
в результате:
выявляют и из процедуры формирования исключают пути, полосы которых перекрыты статичными препятствиями;
определяют коэффициенты  риска столкновения РКПО с каждым из динамичных препятствий, перемещающихся по разным путям, при вероятном встречном движении РКПО и препятствия по эквидистантным полосам двухполосного пути, где
риска столкновения РКПО с каждым из динамичных препятствий, перемещающихся по разным путям, при вероятном встречном движении РКПО и препятствия по эквидистантным полосам двухполосного пути, где
 - номер варианта возможного пути;
- номер варианта возможного пути;
 - номер динамичного препятствия;
- номер динамичного препятствия;
 - вероятность движения динамичного препятствия навстречу РКПО;
- вероятность движения динамичного препятствия навстречу РКПО;
 - отношение текущей скорости динамичного препятствия к разрешенной на аэродроме ее максимальной величине;
- отношение текущей скорости динамичного препятствия к разрешенной на аэродроме ее максимальной величине;
выбирают путь последующего движения РКПО к конечной точке, которому соответствует минимальное среднее значение коэффициента  из числа его значений, выявляемых для всей совокупности j-х препятствий на каждом из возможных i-x путей,
из числа его значений, выявляемых для всей совокупности j-х препятствий на каждом из возможных i-x путей,
определяют оптимальную скорость V движения РКПО по выбранному пути как скорость, минимизирующую целевую функцию  где
где
 - соответственно временные и энергетические затраты на движение по выбранному пути;
- соответственно временные и энергетические затраты на движение по выбранному пути;
 - весовые коэффициенты,
- весовые коэффициенты,
с ограничением скорости движения РКПО разрешенной на аэродроме максимальной величиной, а также величиной, при которой возникает буксование ведущих колес РКПО при текущем погодном состоянии покрытия на аэродроме,
на основе выбранных пути и скорости реализуют траекторное управление движением РКПО по сформированному пути посредством подачи управляющих сигналов блока управления движением на привод колес, при этом:
- в ситуации вероятного встречного движения РКПО и динамичного препятствия по эквидистантным полосам пути на временном интервале проезда РКПО и динамичного препятствия друг относительно друга скорость движения РКПО уменьшают до уровня, при котором скорость РКПО относительно динамичного препятствия не превышает разрешенной максимальной величины;
- в ситуации вероятного следования РКПО за динамичным препятствием по одной полосе скорость движения РКПО уменьшают до величины скорости динамичного препятствия.
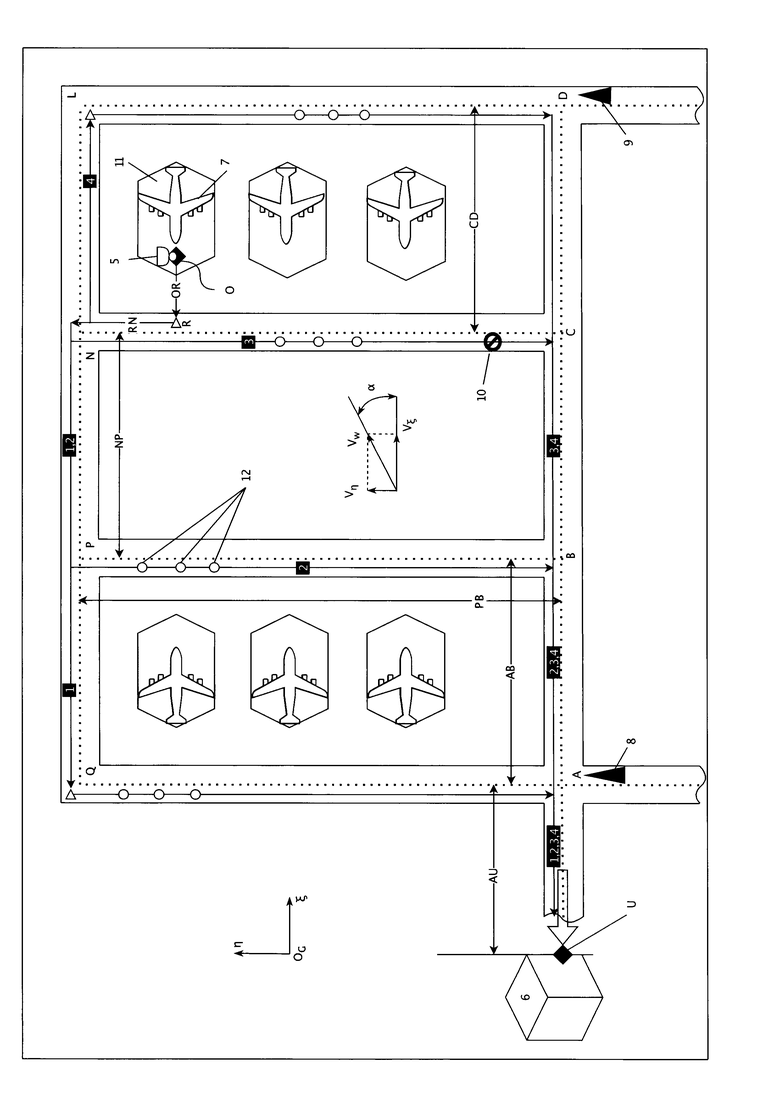
На фигуре применительно к одному из участков аэродрома указаны обозначенные цифрами 1, 2, 3, 4 возможные установленные на аэродроме пути движения РКПО 5 из начальной точки О пути к терминалу 6 до конечной точки U. На фигуре также представлена возможная схема расположения воздушных судов (ВС) 7, двух динамичных 8, 9 и статичного 10 препятствий в начальный момент времени с расположением РКПО 5 в начальной точке пути О на стоянке ВС 11. Здесь также указаны: обозначенные пунктиром разделительные линии между эквидистантными полосами путей 1, 2, 3, 4; частично отмеченные окружностями опорные точки 12; обозначенные буквами А, В, С, D, N, Р развилки маршрутов, включающие ответвления с поворотами; отмеченные буквами R, L, Q не входящие в состав развилок повороты на возможных путях движения техники; обозначенные как AU, АВ, NP, CD, РВ, RN, OR длины соответствующих участков путей. На фигуре в горизонтальной плоскости поверхности аэродрома обозначены также оси географической системы координат  (OG - начало системы координат, ось
(OG - начало системы координат, ось  направлена на Восток, ось
направлена на Восток, ось  направлена на Север). Здесь же обозначен вектор скорости ветра Vw, составляющий угол α с осью
направлена на Север). Здесь же обозначен вектор скорости ветра Vw, составляющий угол α с осью  , а также восточная
, а также восточная  и северная
и северная  составляющие вектора скорости ветра Vw.
составляющие вектора скорости ветра Vw.
Последовательность действий по автоматическому формированию пути и скорости движения РКПО для перевозки грузов между ВС и терминалом аэропорта такова. В память вычислителя НУК РКПО размещают информацию об установленных на аэродроме возможных путях и соответствующих им траекториях движения РКПО по аэродрому. Эти пути представляют в виде совокупности участков, каждый из которых соединяет пару последовательных опорных точек, расстояние между которыми составляет 5-7 метров (такое расстояние соответствует пути, проходимому РКПО между опорными точками за интервал времени между двумя последовательными сигналами, поступающими от радиомаяков статичных и динамичных препятствий, а также от диспетчерской службы аэропорта - частота поступления этих сигналов составляет величину порядка 1 Гц). В каждой опорной точке определяют путь (из числа возможных) и скорость последующего движения РКПО. На каждом участке с помощью НУК реализуют траекторное управление движением РКПО, включающее определение параметров его движения и формирование управляющих сигналов на привод колес РКПО (Основные компоненты НУК и его функционал в части алгоритмов навигационного блока и траекторного управления представлены, например, в работе [Алешин Б.С, Курис Э.Д., Петрухин В.А., Черноморский А.И., Лельков К.С., Хорев Т.С., Михеев В.В. «Наземные одноосные колесные модули для транспортировки и управления угловой ориентацией аппаратуры мониторинга окружающей среды» // XXVIII Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Санкт-Петербург, 2021.-с.158-165]).
Непосредственно перед началом пути РКПО находится на одной из стоянок ВС (фиг.) и от датчиков навигационного блока НУК в вычислитель поступают данные о позиционировании и скорости РКПО, а через радиомаяки других участников движения в вычислитель НУК через приемные устройства поступает также информация о позиционировании и скоростях движения динамичных препятствий, о позиционировании статичных препятствий. Кроме того, в вычислитель НУК вводят данные о габаритных и весовых характеристиках груза, при этом РКПО выполнен с возможностью взвешивания размещаемого на нем груза и определения его габаритных характеристик. В вычислитель НУК также поступают данные от диспетчерской службы о скорости и направлении ветра, о погодном состоянии покрытия на аэродроме посредством приемных устройств, размещенных на борту РКПО. В процессе формирования возможного пути РКПО из процедуры формирования на борту РКПО исключают неприемлемые пути с участками, на которых расположены статичные препятствия (путь 3 на фиг.). Для каждого пути из возможных (после исключения неприемлемых путей) применительно к каждому динамичному препятствию - участнику движения определяют коэффициенты  риска столкновения РКПО с каждым из динамичных препятствий при возможном встречном движении РКПО и препятствия по эквидистантным полосам двухполосных путей.
риска столкновения РКПО с каждым из динамичных препятствий при возможном встречном движении РКПО и препятствия по эквидистантным полосам двухполосных путей.

где i - номер варианта возможного пути; j - номер динамичного препятствия;  - вероятность движения динамичного препятствия навстречу РКПО;
- вероятность движения динамичного препятствия навстречу РКПО;  - отношение текущей скорости динамичного препятствия к разрешенной на аэродроме ее максимальной величине. При этом Pmij на i-том пути каждого j-го динамичного препятствия определяют как произведение вероятностей следования этого динамичного препятствия по ответвлениям в развилках маршрута в направлении i-го пути. В свою очередь, вероятность следования динамичного препятствия по соответствующему ответвлению в одной развилке в направлении i-го пути определяют как величину обратную числу правосторонних ответвлений, исходящих из этой развилки. Далее выбирают такой путь последующего движения РКПО к конечной точке, которому соответствует минимальное среднее значение коэффициента
- отношение текущей скорости динамичного препятствия к разрешенной на аэродроме ее максимальной величине. При этом Pmij на i-том пути каждого j-го динамичного препятствия определяют как произведение вероятностей следования этого динамичного препятствия по ответвлениям в развилках маршрута в направлении i-го пути. В свою очередь, вероятность следования динамичного препятствия по соответствующему ответвлению в одной развилке в направлении i-го пути определяют как величину обратную числу правосторонних ответвлений, исходящих из этой развилки. Далее выбирают такой путь последующего движения РКПО к конечной точке, которому соответствует минимальное среднее значение коэффициента  из числа его значений, выявляемых для всей совокупности j-х препятствий на каждом из возможных i-x путей.
из числа его значений, выявляемых для всей совокупности j-х препятствий на каждом из возможных i-x путей.
Затем определяют оптимальную скорость V движения РКПО по выбранному пути как скорость, минимизирующую целевую функцию Q(V):

где  - соответственно временные и энергетические затраты на движение по выбранному пути;
- соответственно временные и энергетические затраты на движение по выбранному пути;  - весовые коэффициенты, характеризующие вклад соответственно Т и Е в целевую функцию Q(V).
- весовые коэффициенты, характеризующие вклад соответственно Т и Е в целевую функцию Q(V).
Время Т определяется соотношением:

где S - длина выбранного пути.
Энергия Е, затрачиваемая, главным образом, на преодоление аэродинамического сопротивления и сопротивления качению, а также потребляемая на обслуживание борта РКПО, определяется так:

где  - номер непрерывного отрезка выбранного пути с неизменным направлением движения РКПО;
- номер непрерывного отрезка выбранного пути с неизменным направлением движения РКПО;  - длина p-ого отрезка выбранного пути
- длина p-ого отрезка выбранного пути 
 - коэффициент, обеспечивающий учет внутренних энергетических затрат на борту РКПО;
- коэффициент, обеспечивающий учет внутренних энергетических затрат на борту РКПО;  - соответственно коэффициент аэродинамического сопротивления и плотность воздуха;
- соответственно коэффициент аэродинамического сопротивления и плотность воздуха;  - скорость РКПО относительно воздушной среды на р-ом отрезке выбранного пути
- скорость РКПО относительно воздушной среды на р-ом отрезке выбранного пути  - скорость ветра в направлении движения РКПО на р-ом отрезке выбранного пути); М, Н, G - соответственно ширина, высота и вес РКПО с грузом;
- скорость ветра в направлении движения РКПО на р-ом отрезке выбранного пути); М, Н, G - соответственно ширина, высота и вес РКПО с грузом;  - коэффициент сопротивления качению, зависящий от типа и погодного состояния покрытия.
- коэффициент сопротивления качению, зависящий от типа и погодного состояния покрытия.
Осуществляют проверку обеспечения сцепления (отсутствие буксования) между ведущими колесами РКПО и аэродромным покрытием; на каждом участке выбранного пути должно выполняться неравенство:

где ϕ - коэффициент продольного сцепления ведущих колес, зависящий, главным образом, от погодного состояния покрытия.
Производят уменьшение расчетной величины оптимальной скорости до уровня, при котором она не превышает разрешенной максимальной величины на аэродроме и при котором выполняется неравенство (5).
На основе выбранных пути и скорости движения РКПО реализуют траекторное управление его движением посредством подачи управляющих сигналов блока управления движением на привод колес, уменьшая при необходимости скорость РКПО до уровня, при котором его скорость относительно препятствия не превышает разрешенной максимальной величины на аэродроме в ситуации вероятного встречного движения РКПО и динамичного препятствия по эквидистантным полосам выбранного пути на временном интервале проезда РКПО и препятствия друг относительно друга, а также уменьшая при необходимости скорость движения РКПО до величины скорости динамичного препятствия в ситуации вероятного следования РКПО за этим препятствием по одной полосе.
Рассмотрим пример применения предлагаемого способа. Будем полагать, что в начальный момент времени РКПО два динамичных и одно статичное препятствия расположены в соответствии со схемой на фигуре. Используемые в примере параметры таковы: скорости  динамичных препятствий (ДП) - первого (8)
динамичных препятствий (ДП) - первого (8)  , второго (9)
, второго (9)  разрешенная максимальная скорость движения на аэродроме
разрешенная максимальная скорость движения на аэродроме  скорость ветра
скорость ветра  (в соответствии с фиг. при α=30° восточная составляющая
(в соответствии с фиг. при α=30° восточная составляющая  северная составляющая
северная составляющая  коэффициент аэродинамического сопротивления
коэффициент аэродинамического сопротивления  плотность воздуха
плотность воздуха  ширина, высота и вес РКПО с грузом составляют соответственно - М = 1,5 м, H = 2 м, G = 15000 Н.
ширина, высота и вес РКПО с грузом составляют соответственно - М = 1,5 м, H = 2 м, G = 15000 Н.
Выберем путь правостороннего движения РКПО из начальной точки О на стоянке ВС в конечную точку U (у терминала). На фигуре представлены четыре возможных пути 1, 2, 3, 4 движения РКПО. Путь 3 следует исключить, поскольку на его полосе расположено статичное препятствие. На путях i = 1, 2, 4 определим для ДП1 и ДП2 (j = 1, 2) вероятности  движения каждого их этих препятствий навстречу РКПО по эквидистантным полосам этих путей. Для ДП1 (j = 1) с учетом количества развилок на соответствующих путях и количества ответвлений на каждой развилке получим:
движения каждого их этих препятствий навстречу РКПО по эквидистантным полосам этих путей. Для ДП1 (j = 1) с учетом количества развилок на соответствующих путях и количества ответвлений на каждой развилке получим:  Для ДП2 (j = 2) имеем:
Для ДП2 (j = 2) имеем:  Отношения текущих скоростей
Отношения текущих скоростей  к
к  Тогда, в соответствии с (1) коэффициенты риска столкновения РКПО с каждым из двух динамичных препятствий на каждом из трех возможных путей таковы:
Тогда, в соответствии с (1) коэффициенты риска столкновения РКПО с каждым из двух динамичных препятствий на каждом из трех возможных путей таковы:
Средние значения коэффициентов риска  на каждом из трех возможных путей следующие:
на каждом из трех возможных путей следующие:
На основе полученных результатов в соответствии с предлагаемым способом в начальной точке выбираем второй путь движения РКПО к терминалу; ему соответствует минимальное среднее значение риска столкновений РКПО с препятствиями (Kd2 = 0,11).
Определим теперь оптимальную скорость движения РКПО по выбранному пути, минимизируя по скорости V целевую функцию (2). Разобьем предварительно выбранный путь на непрерывные отрезки с неизменными направлениями движения РКПО: 

 При этом весь путь S составляет 1480 м. Весовые коэффициенты
При этом весь путь S составляет 1480 м. Весовые коэффициенты  в (2) выберем из условия равного вклада в Q(V) временной компоненты Г (3) и зависящей от скорости РКПО компоненты ее энергетической составляющей Е (4) в условиях движения РКПО с разрешенной на аэродроме максимальной скоростью. Будем пренебрегать при этом компонентой энергетической составляющей, затрачиваемой на преодоление трения качения вследствие малой зависимости коэффициента сопротивления качению
в (2) выберем из условия равного вклада в Q(V) временной компоненты Г (3) и зависящей от скорости РКПО компоненты ее энергетической составляющей Е (4) в условиях движения РКПО с разрешенной на аэродроме максимальной скоростью. Будем пренебрегать при этом компонентой энергетической составляющей, затрачиваемой на преодоление трения качения вследствие малой зависимости коэффициента сопротивления качению  от скорости РКПО. Это справедливо при скорости движения РКПО V<15 м/с по сухому асфальтобетонному покрытию, находящемуся в удовлетворительном состоянии [Тарасик В.П. Теория движения автомобиля. - С. - Пб.: БХВ-Петербург, 2006]. Равенство временного и энергетического вкладов в Q(V) на основе (2), (4) определяется соотношением:
от скорости РКПО. Это справедливо при скорости движения РКПО V<15 м/с по сухому асфальтобетонному покрытию, находящемуся в удовлетворительном состоянии [Тарасик В.П. Теория движения автомобиля. - С. - Пб.: БХВ-Петербург, 2006]. Равенство временного и энергетического вкладов в Q(V) на основе (2), (4) определяется соотношением:  В рамках принятого разбиения второго (выбранного) пути на отрезки, а также с учетом направлений компонентов скорости ветра на отрезках это соотношение можно переписать так:
В рамках принятого разбиения второго (выбранного) пути на отрезки, а также с учетом направлений компонентов скорости ветра на отрезках это соотношение можно переписать так:
Отсюда, принимая  с учетом принятых значений параметров получим:
с учетом принятых значений параметров получим: 
Тогда, целевая функция Q(V), имеющая вид:
 достигает минимума при
достигает минимума при  Найденная таким образом оптимальная скорость VO удовлетворяет соотношению: VO < Vmax.
Найденная таким образом оптимальная скорость VO удовлетворяет соотношению: VO < Vmax.
Условие (5) обеспечения сцепления между ведущими колесами РКПО и аэродромным покрытием (отсутствует буксование ведущих колес) также выполняется на всех отрезках выбранного пути.

где ϕ=0,7…0,8 (сухое асфальтобетонное покрытие), 0,34…0,45 (мокрое асфальтобетонное покрытие); ƒk = 0,02 (асфальтобетонное покрытие в удовлетворительном состоянии).
Будем полагать, что ДП1 и ДП2 находятся в непосредственной близости соответственно от развилок А и D. При скорости РКПО  и скорости ДГТ2
и скорости ДГТ2  РКПО достигает развилки В быстрее, чем с вероятностью 1/4 ее достигает ДП2, и, следовательно, отсутствует возможность встречного движения РКПО и ДП2 на отрезке РВ, а также возможность следования РКПО за ДП2 на отрезке BU = AB+AU. При скорости РКПО
РКПО достигает развилки В быстрее, чем с вероятностью 1/4 ее достигает ДП2, и, следовательно, отсутствует возможность встречного движения РКПО и ДП2 на отрезке РВ, а также возможность следования РКПО за ДП2 на отрезке BU = AB+AU. При скорости РКПО  и скорости ДП1
и скорости ДП1  ДП1 ранее, чем РКПО, может достичь развилки В и с вероятностью 1/6 направиться навстречу РКПО по правой полосе в сторону развилки Р. На отрезке РВ на 72.2 с в этой связи возможна встреча ДП1 и РКПО, движущихся по эквидистантным полосам. На временном интервале их проезда друг относительно друга в соответствии с предложенным способом необходимо уменьшить скорость РКПО до уровня, при котором эта скорость относительно ДП1 станет равной или меньшей Vmax, т.е. скорость движения РКПО должна удовлетворять на этом участке проезда условию V < 0.56 м/с.
ДП1 ранее, чем РКПО, может достичь развилки В и с вероятностью 1/6 направиться навстречу РКПО по правой полосе в сторону развилки Р. На отрезке РВ на 72.2 с в этой связи возможна встреча ДП1 и РКПО, движущихся по эквидистантным полосам. На временном интервале их проезда друг относительно друга в соответствии с предложенным способом необходимо уменьшить скорость РКПО до уровня, при котором эта скорость относительно ДП1 станет равной или меньшей Vmax, т.е. скорость движения РКПО должна удовлетворять на этом участке проезда условию V < 0.56 м/с.
В рассмотренном примере результаты формирования пути и скорости движения РКПО получены применительно к положению РКПО в начальной точке О пути. На основе выбранных пути и скорости через НУК РКПО и привод его колес реализуют траекторное управление движением РКПО. Процедура последующего формирования пути и скорости движения РКПО должна повторяться в каждой опорной точке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ МОБИЛЬНЫХ ОБЪЕКТОВ НА АЭРОДРОМЕ | 2014 |
|
RU2560220C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
Изобретение относится к управлению роботизированными подвижными объектами. В способе автоматического формирования пути и скорости движения роботизированного колесного подвижного объекта (РКПО) для перевозки грузов между воздушным судном на его стоянке и терминалом аэропорта в каждой опорной точке вводят в вычислитель данные из навигационного блока, определяющие позиционирование и скорость РКПО, а также данные, поступающие от радиомаяков, установленных на статичных и динамичных препятствиях; данные о весовых и габаритных характеристиках груза РКПО; данные о скорости и направлении ветра. Обрабатывают в вычислителе указанные данные. На основе выбранных пути и скорости управляют движением РКПО по сформированному пути. В ситуации вероятного встречного движения РКПО и динамичного препятствия скорость РКПО уменьшают до уровня, при котором скорость РКПО относительно динамичного препятствия не превышает разрешенной максимальной величины. В ситуации вероятного следования РКПО за динамичным препятствием по одной полосе скорость РКПО уменьшают до величины скорости динамичного препятствия. Повышается безопасность движения по аэропорту. 1 ил.
Способ автоматического формирования пути и скорости движения роботизированного колесного подвижного объекта (РКПО) для перевозки грузов между воздушным судном на его стоянке и терминалом аэропорта при наличии динамичных и статичных препятствий на размеченной поверхности покрытия аэродрома с установленными двухполосными путями движения, оснащенного навигационно-управляющим комплексом (НУК), включающим навигационный блок с датчиками навигационных параметров РКПО, блок управления движением РКПО и вычислитель, заключающийся в представлении пути движения в виде совокупности участков, каждый из которых соединяет пару последовательных опорных точек, определении в каждой опорной точке скорости последующего движения РКПО, реализации движения РКПО из начальной в конечную точки пути с помощью блока управления движением, отличающийся тем, что в память вычислителя НУК РКПО размещают информацию о возможных путях и соответствующих им траекториях движения РКПО по аэродрому, в каждой опорной точке вводят в вычислитель:
- данные, поступающие из навигационного блока и определяющие позиционирование и скорость РКПО, а также данные, поступающие от радиомаяков, установленных на статичных и динамичных препятствиях и передающих информацию о позиционировании статичных препятствий, а также о позиционировании и скоростях динамичных препятствий, при этом РКПО и динамичные препятствия рассматриваются только как участники правостороннего движения;
- данные о весовых и габаритных характеристиках груза РКПО, при этом РКПО выполнен с возможностью взвешивания размещаемого на нем груза;
- данные о скорости и направлении ветра, а также о погодном состоянии покрытия на аэродроме, получаемые от диспетчерской службы аэропорта посредством приемных устройств, размещенных на борту РКПО,
обрабатывают в вычислителе НУК данные о позиционировании и скорости РКПО, о позиционировании статичных препятствий, о позиционировании и скорости динамичных препятствий, о весовых и габаритных характеристиках груза РКПО, о скорости и направлении ветра, о погодном состоянии покрытия на аэродроме,
в результате:
выявляют и из процедуры формирования исключают пути, полосы которых перекрыты статичными препятствиями;
определяют коэффициенты Kdij=PmijKvj риска столкновения РКПО с каждым из динамичных препятствий, перемещающихся по разным путям, при вероятном встречном движении РКПО и препятствия по эквидистантным полосам двухполосного пути, где
i - номер варианта возможного пути;
j - номер динамичного препятствия;
Pmij - вероятность движения динамичного препятствия навстречу РКПО;
Kvj - отношение текущей скорости динамичного препятствия к разрешенной на аэродроме ее максимальной величине;
выбирают путь последующего движения РКПО к конечной точке, которому соответствует минимальное среднее значение коэффициента Kdij из числа его значений, выявляемых для всей совокупности j-х препятствий на каждом из возможных i-x путей,
определяют оптимальную скорость V движения РКПО по выбранному пути как скорость, минимизирующую целевую функцию Q(V)=KtT+KeE, где
Т, Е - соответственно временные и энергетические затраты на движение по выбранному пути;
Kt, Ke - весовые коэффициенты,
с ограничением скорости движения РКПО разрешенной на аэродроме максимальной величиной, а также величиной, при которой возникает буксование ведущих колес РКПО при текущем погодном состоянии покрытия на аэродроме,
на основе выбранных пути и скорости реализуют траекторное управление движением РКПО по сформированному пути посредством подачи управляющих сигналов блока управления движением на привод колес, при этом:
- в ситуации вероятного встречного движения РКПО и динамичного препятствия по эквидистантным полосам пути на временном интервале проезда РКПО и динамичного препятствия друг относительно друга скорость движения РКПО уменьшают до уровня, при котором скорость РКПО относительно динамичного препятствия не превышает разрешенной максимальной величины;
- в ситуации вероятного следования РКПО за динамичным препятствием по одной полосе скорость движения РКПО уменьшают до величины скорости динамичного препятствия.
| Способ для адаптивного управления характеристиками движения высокоавтоматизированного транспортного средства в зависимости от уровня неопределенности в оценке окружающей ситуации | 2021 |
|
RU2783780C1 |
| Способ создания трека пути движения для автономного движения подвижного объекта и способ осуществления автономного движения подвижного объекта по треку пути движения | 2018 |
|
RU2691679C1 |
| ПЛАНИРОВАНИЕ ТРАЕКТОРИИ | 2019 |
|
RU2762786C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ РОБОТОМ | 2015 |
|
RU2619542C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| WO 2022098519 A1, 12.05.2022 | |||
| US 20190243371 A1, 08.08.2019. | |||

