Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу и устройству управления движением, которые распознают полосу движения, в которой движется рассматриваемое транспортное средство, и управляют движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения.
Уровень техники
[0002] Патентный документ 1 раскрывает устройство помощи при движении традиционного транспортного средства, которое помогает при движении посредством распознавания разделительных линий слева и справа от дороги. Когда расстояние между левой и правой разделительными линиями увеличивается по мере того, как дорога разветвляется, устройство помощи при движении транспортного средства в патентном документе 1 помогает при движении посредством использования разделительной линии, в качестве опорной линии, которая идет вдоль дороги, по которой транспортное средство планирует двигаться.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент Японии номер 2009-214786
Сущность изобретения
Техническая задача
[0004] Здесь, в полосе движения на правый поворот на местной дороге, в полосе движения на съезд с автострады и т.п., ширина полосы движения увеличивается вдоль запланированной проезжей дороги. В частности, на въезде полосы движения на правый поворот или на въезде полосы движения на съезд с автострады, сплошная линия представляет границу между дорогой и обочиной, центральная линия дороги и т.п. сдвигается наружу вдоль запланированной проезжей дороги, за счет этого увеличивая ширину полосы движения. Таким образом, когда ширина полосы движения увеличивается на въезде полосы движения на правый поворот на местной дороге или на въезде полосы движения на съезд с автострады, вышеуказанное устройство помощи при движении традиционного транспортного средства помогает при движении на основе сплошной линии, сдвигающейся наружу таким образом, что транспортное средство должно направляться к правой стороне, если предусмотрена полоса движения на правый поворот, и к левой стороне, если предусмотрена полоса движения на съезд. По этой причине, возникает проблема неспособности управлять рассматриваемым транспортным средством таким образом, что оно движется в соответствующей позиции в пределах своей полосы движения.
[0005] Настоящее изобретение предложено с учетом вышеизложенных обстоятельств, и его цель заключается в том, чтобы предоставлять способ и устройство управления движением, которые позволяют управлять рассматриваемым транспортным средством таким образом, что оно движется в соответствующей позиции в пределах своей полосы движения в окружении, в котором ширина полосы движения увеличивается, такой как полоса движения на правый поворот на местной дороге, выезд на автостраде и т.п.
Решение задачи
[0006] Чтобы разрешать вышеуказанную проблему, способ и устройство управления движением согласно аспекту настоящего изобретения, если ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается, и определяется то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, управляют движением рассматриваемого транспортного средства на основе пунктирной граничной линии.
Преимущества изобретения
[0007] Согласно настоящему изобретению, рассматриваемое транспортное средство может управляться таким образом, что оно движется в соответствующей позиции в пределах своей полосы движения в случае, если одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию в окружении, в котором ширина полосы движения увеличивается.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы управления движением, включающей в себя устройство управления движением согласно одному варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру обработки в процессе управления движением посредством устройства управления движением согласно одному варианту осуществления настоящего изобретения.
Фиг. 3 является схемой для пояснения способа управления движением посредством устройства управления движением согласно одному варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описывается один вариант осуществления, к которому применяется настоящее изобретение, со ссылкой на чертежи.
[0010] Конфигурация системы управления движением
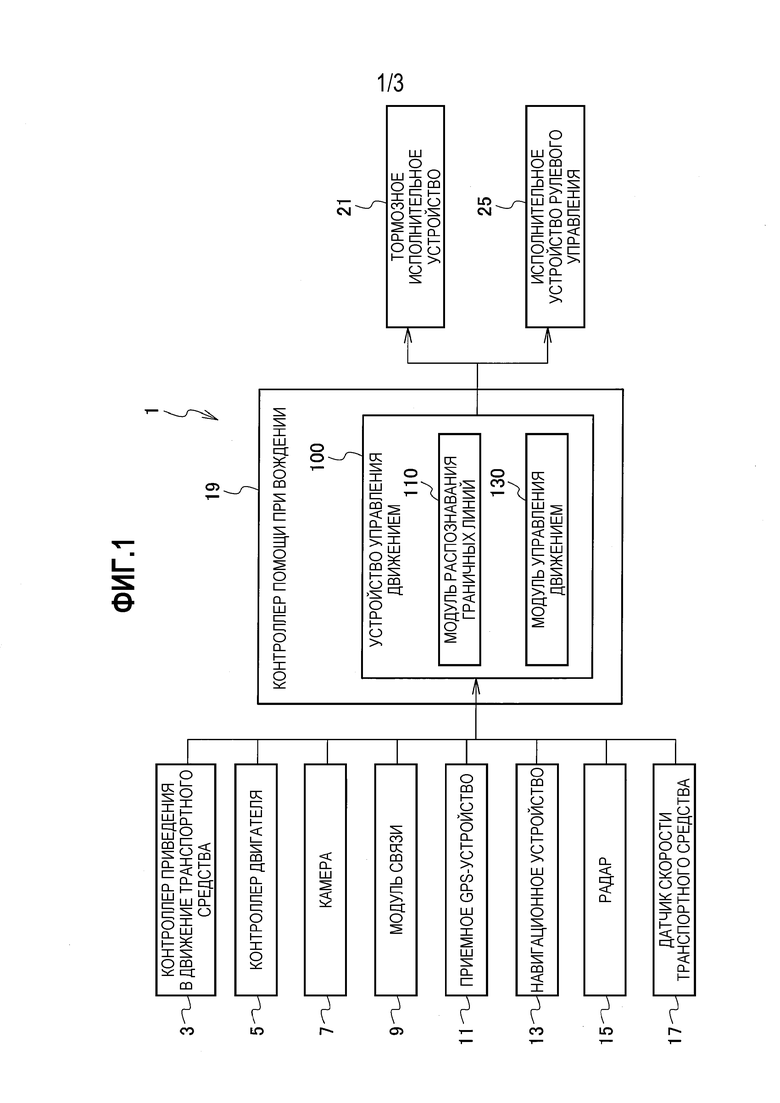
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы управления движением, включающей в себя устройство управления движением согласно этому варианту осуществления. Как проиллюстрировано на фиг. 1, система 1 управления движением согласно этому варианту осуществления включает в себя контроллер 3 приведения в движение транспортного средства, контроллер 5 двигателя, камеру 7, модуль 9 связи, приемное GPS-устройство 11, навигационное устройство 13, радар 15 и датчик 17 скорости транспортного средства. Система 1 управления движением также включает в себя контроллер 19 помощи при вождении, тормозное исполнительное устройство 21 и исполнительное устройство 25 рулевого управления. Дополнительно, контроллер 19 помощи при вождении включает в себя устройство 100 управления движением. Система 1 управления движением с этой конфигурацией устанавливается на транспортном средстве, и транспортное средство с системой 1 управления движением, установленной на нем, оснащено системами помощи при вождении, такими как адаптивная система оптимального регулирования скорости и система помощи для удержания на полосе движения.
[0011] Контроллер 3 приведения в движение транспортного средства включает в себя системы, которые управляют приведением в движение транспортного средства, такие как антиблокировочная тормозная система, система регулирования тяги и система управления динамикой транспортного средства. Контроллер 5 двигателя представляет собой контроллер, который управляет двигателем. Камера 7 формирует изображение окрестностей рассматриваемого транспортного средства и получает изображение, в котором захватываются едущие впереди транспортные средства и граничные линии полос движения. Изображение, захваченное посредством камеры 7, используется для того, чтобы получать такую информацию, как расстояния между транспортными средствами и относительные скорости между рассматриваемым транспортным средством и едущими впереди транспортными средствами и позиции граничных линий. Модуль 9 связи выполняет связь между транспортным средством и дорожной инфраструктурой и прием и передачу услуги обмена информацией с использованием мобильной телефонной линии. Приемное GPS-устройство 11 принимает информацию относительно широты, долготы и высоты над уровнем моря рассматриваемого транспортного средства из спутника. Навигационное устройство 13 электронным образом сохраняет картографическую информацию, обнаруживает местоположение рассматриваемого транспортного средства и вычисляет навигационный маршрут в пункт назначения. Радар 15 измеряет расстояния между транспортными средствами и относительные скорости между едущими впереди транспортными средствами и рассматриваемым транспортным средством посредством использования миллиметровых волн. Датчик 17 скорости транспортного средства измеряет скорость транспортного средства для рассматриваемого транспортного средства.
[0012] Контроллер 19 помощи при вождении управляет системами помощи при вождении, такими как адаптивная система оптимального регулирования скорости, экстренный тормоз и автоудерживаемый тормоз и система автономного вождения. В частности, контроллер 19 помощи при вождении имеет функцию недопущения выезда за пределы полосы движения (функцию помощи для удержания на полосе движения), чтобы распознавать полосу движения, в которой движется рассматриваемое транспортное средство, и управлять движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения. Кроме того, контроллер 19 помощи при вождении может включать в себя систему, включающую в себя адаптивную систему оптимального регулирования скорости с функцию управления рулением, добавленную в нее. Контроллер 19 помощи при вождении обнаруживает присутствие или отсутствие любого едущего впереди транспортного средства, обнаруживает граничные линии (обнаруживает полосы движения), измеряет расстояния между транспортными средствами и измеряет поперечную позицию рассматриваемого транспортного средства относительно каждой граничной линии посредством использования камеры 7 и радара 15. Кроме того, контроллер 19 помощи при вождении управляет поперечной позицией рассматриваемого транспортного средства посредством отправки инструкций в тормозное исполнительное устройство 21 и исполнительное устройство 25 рулевого управления. Когда отсутствуют едущие впереди транспортные средства, контроллер 19 помощи при вождении выполняет управление скоростью транспортного средства, которое инструктирует рассматриваемому транспортному средству постоянно двигаться с заданной скоростью транспортного средства. Когда имеется едущее впереди транспортное средство, контроллер 19 помощи при вождении выполняет управление поддержанием расстояния между транспортными средствами, которое инструктирует рассматриваемому транспортному средству двигаться при поддержании постоянного расстояния между транспортными средствами до едущего впереди транспортного средства. Когда едущее впереди транспортное средство останавливается, контроллер 19 помощи при вождении выполняет управление, которое также инструктирует рассматриваемому транспортному средству останавливаться и оставаться остановленным.
[0013] Тормозное исполнительное устройство 21 выполняет операцию торможения для управления торможением рассматриваемого транспортного средства при приеме инструкции из контроллера 19 помощи при вождении. Исполнительное устройство 25 рулевого управления выполняет операцию руления для управления поперечной позицией рассматриваемого транспортного средства при приеме инструкции из контроллера 19 помощи при вождении.
[0014] Устройство 100 управления движением устанавливается в контроллере 19 помощи при вождении и распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения, совместно с контроллером 19 помощи при вождении. В частности, устройство 100 управления движением отслеживает то, увеличена или нет ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, в то время, когда выполняется функция помощи для удержания на полосе движения контроллера 19 помощи при вождении. Допустим, что устройство 100 управления движением обнаруживает увеличение ширины полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство. В этом случае, при определении того, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию (например, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и сплошной линии), устройство 100 управления движением управляет движением рассматриваемого транспортного средства на основе пунктирной граничной линии. Между тем, если невозможно определять то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию (например, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, не представляют собой комбинацию пунктирной линии и сплошной линии), устройство 100 управления движением управляет движением рассматриваемого транспортного средства на основе граничной линии на стороне встречного транспортного средства (справа от рассматриваемого транспортного средства в случае левостороннего движения) при условии, что рассматриваемое транспортное средство находится на автостраде, тогда как устройство 100 управления движением управляет движением рассматриваемого транспортного средства на основе граничной линии на стороне, противоположной относительно встречных транспортных средств (слева от рассматриваемого транспортного средства в случае левостороннего движения) при условии, что рассматриваемое транспортное средство находится на местной дороге. Устройство 100 управления движением с такой функцией включает в себя модуль 110 распознавания граничных линий и модуль 130 управления движением.
[0015] Модуль 110 распознавания граничных линий распознает граничные линии полосы движения, в которой движется рассматриваемое транспортное средство, посредством получения изображения, захваченного с помощью камеры 7. В частности, модуль 110 распознавания граничных линий распознает позиции граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, посредством обнаружения позиций краевых точек граничных линий, в которых яркость значительно изменяется в полученном изображении. Дополнительно, модуль 110 распознавания граничных линий также может распознавать типы линий граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, и различать между сплошной линией и пунктирной линией. Кроме того, модуль 110 распознавания граничных линий может распознавать цвет каждой граничной линии, например, то, представляет она собой белую сигнальную линию дорожной разметки или желтую линию. После распознавания позиций граничных линий вышеуказанным способом, модуль 110 распознавания граничных линий отслеживает позиции граничных линий в то время, когда рассматриваемое транспортное средство движется, чтобы за счет этого определять то, увеличено или нет расстояние между граничными линиями, расположенными слева и справа от рассматриваемого транспортного средства, т.е. ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство.
[0016] Если модуль 110 распознавания граничных линий обнаруживает увеличение ширины полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, модуль 130 управления движением управляет движением в соответствии с типами линий граничных линий, расположенных слева и справа от рассматриваемого транспортного средства. В частности, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и сплошной линии, модуль 130 управления движением управляет движением рассматриваемого транспортного средства на основе пунктирной граничной линии. Другими словами, модуль 130 управления движением инструктирует рассматриваемому транспортному средству двигаться с функцией помощи для удержания на полосе движения, выполняемой относительно пунктирной граничной линии из числа граничных линий, расположенных слева и справа от рассматриваемого транспортного средства. С другой стороны, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, не представляют собой комбинацию пунктирной линии и сплошной линии, модуль 130 управления движением инструктирует рассматриваемому транспортному средству двигаться с функцией помощи для удержания на полосе движения, выполняемой относительно граничной линии справа от рассматриваемого транспортного средства в то время, когда рассматриваемое транспортное средство движется на автостраде, тогда как модуль 130 управления движением инструктирует рассматриваемому транспортному средству двигаться с функцией помощи для удержания на полосе движения, выполняемой относительно граничной линии слева от рассматриваемого транспортного средства в то время, когда рассматриваемое транспортное средство движется по местной дороге.
[0017] Следует отметить, что устройство 100 управления движением выполнено в виде электронной схемы общего назначения, включающей в себя микрокомпьютер, микропроцессор и CPU и периферийное устройство, такое как запоминающее устройство. Дополнительно, посредством выполнения конкретной программы, устройство 100 управления движением работает в качестве вышеописанного модуля 110 распознавания граничных линий и модуля 130 управления движением. Каждая из этих функций устройства 100 управления движением может реализовываться с помощью одной или более схем обработки. Примеры схем обработки включают в себя программируемые обрабатывающие устройства, такие как обрабатывающие устройства, включающие в себя электрические схемы, а также включают в себя устройства, такие как специализированные интегральные схемы (ASIC), выполненные с возможностью выполнять функции, описанные в варианте осуществления, и традиционные схемные компоненты.
[0018] Процедура процесса управления движением
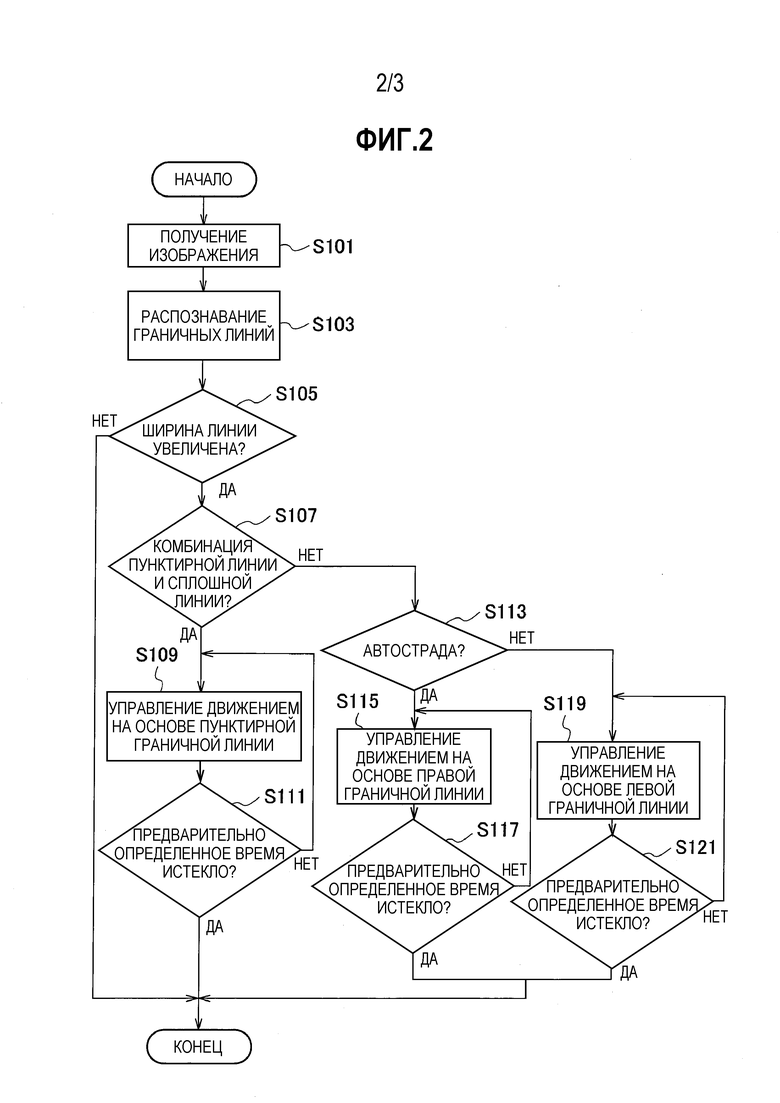
Далее описывается процедура процесса управления движением посредством устройства 100 управления движением согласно этому варианту осуществления со ссылкой на блок-схему последовательности операций способа на фиг. 2. Процесс управления движением, проиллюстрированный на фиг. 2, представляет собой процесс, выполняемый в то время, когда контроллер 19 помощи при вождении выполняет функцию помощи для удержания на полосе движения.
[0019] Как проиллюстрировано на фиг. 2, сначала на этапе S101, модуль 110 распознавания граничных линий получает изображение, захваченное с помощью камеры 7.
[0020] На этапе S103, модуль 110 распознавания граничных линий анализирует полученное изображение, чтобы обнаруживать граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, и распознавать позиции граничных линий. При этом модуль 110 распознавания граничных линий также различает и распознает то, представляет собой тип линии каждой граничной линии сплошную линию или пунктирную линию, а также распознает цвета каждой граничной линии, например, то, представляет она собой белую сигнальную линию дорожной разметки или желтую линию.
[0021] На этапе S105, модуль 110 распознавания граничных линий определяет то, увеличена или нет ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство. Модуль 110 распознавания граничных линий определяет то, увеличена или нет ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, посредством мониторинга позиций граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, и определения того, увеличено или нет расстояние между граничными линиями.
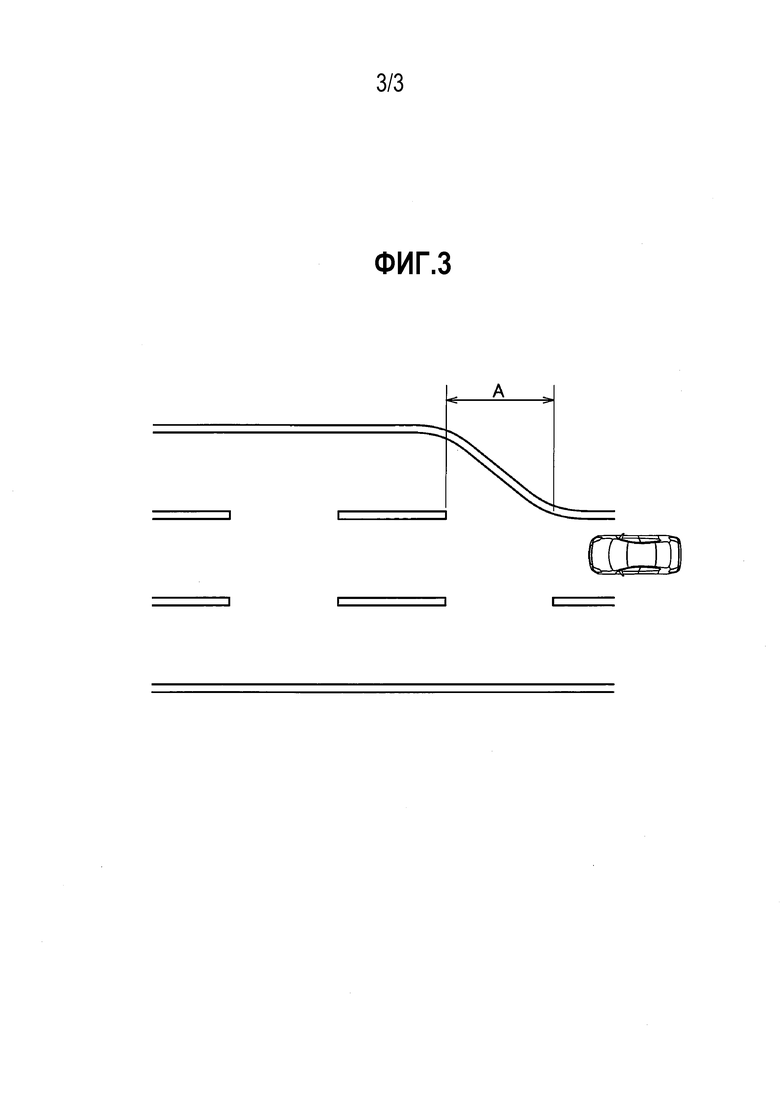
[0022] Например, как проиллюстрировано на фиг. 3, в ситуации, в которой рассматриваемое транспортное средство движется по местной дороге, ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается к правой стороне в секции A в части, в которой полоса движения на правый поворот начинается. Аналогично, в части автострады, в которой полоса движения на съезд начинается, ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается к левой стороне. Модуль 110 распознавания граничных линий обнаруживает эти увеличения ширины полосы движения. Если ширина полосы движения не увеличена, модуль 110 распознавания граничных линий завершает процесс управления движением в этом варианте осуществления, и контроллер 19 помощи при вождении выполняет нормальную функцию помощи для удержания на полосе движения. С другой стороны, если ширина полосы движения увеличена, модуль 110 распознавания граничных линий переходит к этапу S107.
[0023] На этапе S107, модуль 110 распознавания граничных линий определяет то, представляют собой или нет граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, комбинацию пунктирной линии и сплошной линии. Как проиллюстрировано на фиг. 3, в секции A, граничная линия справа от рассматриваемого транспортного средства представляет собой сплошную линию, и граничная линия слева представляет собой пунктирную линию. Аналогично, на въезде полосы движения на съезд с автострады, полоса движения слева от рассматриваемого транспортного средства представляет собой сплошную линию, и полоса движения справа представляет собой пунктирную линию. Затем, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и сплошной линии, как проиллюстрировано на фиг. 3, модуль 110 распознавания граничных линий переходит к этапу S109. С другой стороны, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, не представляют собой комбинацию пунктирной линии и сплошной линии, т.е. если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и пунктирной линии либо комбинацию сплошной линии и сплошной линии, модуль 110 распознавания граничных линий переходит к этапу S113.
[0024] На этапе S109, модуль 130 управления движением управляет движением рассматриваемого транспортного средства на основе пунктирной граничной линии. Другими словами, модуль 130 управления движением выполняет управление удержанием на полосе движения относительно пунктирной граничной линии. Как проиллюстрировано на фиг. 3, на местной дороге, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и сплошной линии, пунктирная линия представляет границу между несколькими полосами движения, и сплошная линия представляет центральную линию дороги. Кроме того, на въезде полосы движения на съезд с автострады, пунктирная линия представляет границу между несколькими полосами движения, и сплошная линия представляет границу между обочиной и дорогой. Таким образом, в любом случае, пунктирная линия представляет границу между несколькими полосами движения и представляет собой граничную линию, указывающую дорогу, по которой рассматриваемое транспортное средство в данный момент движется. С другой стороны, сплошная линия представляет собой граничную линию, указывающую полосу движения за пределами дороги, по которой рассматриваемое транспортное средство в данный момент движется, такую как полоса движения на правый поворот или полоса движения на съезд с автострады. Таким образом, если ширина полосы движения между граничными линиями, расположенными слева и справа от рассматриваемого транспортного средства, увеличивается, и граничные линии появляются в качестве комбинации пунктирной линии и сплошной линии, модуль 130 управления движением управляет движением рассматриваемого транспортного средства на основе пунктирной граничной линии. Таким образом, рассматриваемое транспортное средство может продолжать движение по дороге, по которой оно в данный момент движется.
[0025] На этапе S111, модуль 130 управления движением определяет то, истекло или нет предварительно определенное время, чтобы определять то, проезжает или нет рассматриваемое транспортное средство секцию A на фиг. 3. Ширина полосы движения увеличивается до тех пор, пока рассматриваемое транспортное средство не проедет секцию A. Таким образом, если предварительно определенное время не прошло, модуль 130 управления движением возвращается к этапу S109 и продолжает управление движением рассматриваемого транспортного средства на основе пунктирной граничной линии. С другой стороны, как только рассматриваемое транспортное средство проезжает секцию A, граничные линии могут распознаваться слева и справа от рассматриваемого транспортного средства, и в силу этого может выполняться нормальное управление удержанием на полосе движения. Таким образом, если предварительно определенное время истекло, модуль 130 управления движением завершает процесс управления движением в этом варианте осуществления, и контроллер 19 помощи при вождении выполняет нормальную функцию помощи для удержания на полосе движения.
[0026] На этапе S113, модуль 130 управления движением получает информацию из приемного GPS-устройства 11 и навигационного устройства 13 и определяет то, находится или нет текущее местоположение рассматриваемого транспортного средства на автостраде. Здесь, модуль 130 управления движением переходит к этапу S115, если текущее местоположение находится на автостраде, и переходит к этапу S119, если текущее местоположение находится не на автостраде, а на местной дороге.
[0027] На этапе S115, модуль 130 управления движением управляет движением рассматриваемого транспортного средства на основе граничной линии справа от рассматриваемого транспортного средства. Другими словами, модуль 130 управления движением выполняет управление удержанием на полосе движения относительно граничной линии справа от рассматриваемого транспортного средства. Когда ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается в то время, когда рассматриваемое транспортное средство на автостраде, рассматриваемое транспортное средство с большой вероятностью должно находиться на въезде полосы движения на съезд с автострады. Таким образом, модуль 130 управления движением выполняет управление удержанием на полосе движения относительно граничной линии справа от рассматриваемого транспортного средства, чтобы предотвращать направление рассматриваемого транспортного средства к левой стороне и движение к выезду автострады.
[0028] На этапе S117, модуль 130 управления движением определяет то, истекло или нет предварительно определенное время, чтобы определять то, проезжает или нет рассматриваемое транспортное средство секцию A на фиг. 3. Ширина полосы движения увеличивается до тех пор, пока рассматриваемое транспортное средство не проедет секцию A. Таким образом, если предварительно определенное время не прошло, модуль 130 управления движением возвращается к этапу S115 и продолжает управление движением рассматриваемого транспортного средства на основе правой граничной линии. С другой стороны, как только рассматриваемое транспортное средство проезжает секцию A, граничные линии могут распознаваться слева и справа от рассматриваемого транспортного средства, и в силу этого нормальное управление удержанием на полосе движения может выполняться. Таким образом, если предварительно определенное время истекло, модуль 130 управления движением завершает процесс управления движением в этом варианте осуществления, и контроллер 19 помощи при вождении выполняет нормальную функцию помощи для удержания на полосе движения.
[0029] На этапе S119, модуль 130 управления движением управляет движением рассматриваемого транспортного средства на основе граничной линии слева от рассматриваемого транспортного средства. Другими словами, модуль 130 управления движением выполняет управление удержанием на полосе движения относительно граничной линии слева от рассматриваемого транспортного средства. Когда ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается в то время, когда рассматриваемое транспортное средство на местной дороге, рассматриваемое транспортное средство с большой вероятностью должно находиться на въезде полосы движения на правый поворот. Таким образом, модуль 130 управления движением выполняет управление удержанием на полосе движения относительно граничной линии слева от рассматриваемого транспортного средства, чтобы предотвращать направление рассматриваемого транспортного средства к правой стороне и движение к полосе движения на правый поворот.
[0030] На этапе S121, модуль 130 управления движением определяет то, истекло или нет предварительно определенное время, чтобы определять то, проезжает или нет рассматриваемое транспортное средство секцию A на фиг. 3. Ширина полосы движения увеличивается до тех пор, пока рассматриваемое транспортное средство не проедет секцию A. Таким образом, если предварительно определенное время не прошло, модуль 130 управления движением возвращается к этапу S119 и продолжает управление движением рассматриваемого транспортного средства на основе левой граничной линии. С другой стороны, как только рассматриваемое транспортное средство проезжает секцию A, граничные линии могут распознаваться слева и справа от рассматриваемого транспортного средства, и в силу этого нормальное управление удержанием на полосе движения может выполняться. Таким образом, если предварительно определенное время истекло, модуль 130 управления движением завершает процесс управления движением в этом варианте осуществления, и контроллер 19 помощи при вождении выполняет нормальную функцию помощи для удержания на полосе движения.
[0031] Преимущество варианта осуществления
Как подробно описано выше, при обнаружении увеличения ширины полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, и определении того, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию (например, граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и сплошной линии), устройство 100 управления движением согласно этому варианту осуществления управляет движением рассматриваемого транспортного средства на основе пунктирной граничной линии. Таким образом, рассматриваемое транспортное средство может управляться таким образом, что оно движется в соответствующей позиции в пределах своей полосы движения, даже когда ширина полосы движения увеличивается на въезде полосы движения на правый поворот на местной дороге или на въезде полосы движения на съезд с автострады.
[0032] Например, как проиллюстрировано на фиг. 3, в секции A на въезде полосы движения на правый поворот, ширина полосы движения увеличивается. Затем выполнение управления удержанием на полосе движения, чтобы заставлять рассматриваемое транспортное средство двигаться в центре своей полосы движения, должно приводить к перемещению рассматриваемого транспортного средства к правой стороне и невозможности управлять рассматриваемым транспортным средством таким образом, что оно движется в соответствующей позиции в пределах своей полосы движения. Тем не менее, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и сплошной линии, когда ширина полосы движения увеличивается, устройство 100 управления движением согласно этому варианту осуществления управляет движением рассматриваемого транспортного средства на основе пунктирной граничной линии. Как проиллюстрировано на фиг. 3, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, представляют собой комбинацию пунктирной линии и сплошной линии, пунктирная линия представляет границу между несколькими полосами движения. Затем посредством выполнения управления удержанием на полосе движения на основе пунктирной граничной линии, рассматриваемое транспортное средство может продолжать движение по дороге, по которой оно в данный момент движется. Кроме того, посредством выполнения управления удержанием на полосе движения на основе пунктирной граничной линии, рассматриваемое транспортное средство не переместится к правой стороне, и в силу этого рассматриваемое транспортное средство может управляться таким образом, что оно движется в соответствующей позиции в пределах своей полосы движения.
[0033] Кроме того, если невозможно определять то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию (например, если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, не представляют собой комбинацию пунктирной линии и сплошной линии), устройство 100 управления движением согласно этому варианту осуществления управляет движением рассматриваемого транспортного средства на основе граничной линии на стороне встречного транспортного средства (справа от рассматриваемого транспортного средства в случае левостороннего движения) при условии, что рассматриваемое транспортное средство находится на автостраде, тогда как устройство 100 управления движением управляет движением рассматриваемого транспортного средства на основе граничной линии на стороне, противоположной относительно встречных транспортных средств (слева от рассматриваемого транспортного средства в случае левостороннего движения) при условии, что рассматриваемое транспортное средство находится на местной дороге. Таким образом, рассматриваемое транспортное средство может управляться таким образом, что оно движется в соответствующей позиции в пределах своей полосы движения, когда ширина полосы движения увеличивается на въезде полосы движения на правый поворот на местной дороге или на въезде полосы движения на съезд с автострады, даже если граничные линии, расположенные слева и справа от рассматриваемого транспортного средства, не представляют собой комбинацию пунктирной линии и сплошной линии (например, даже если невозможно распознавать пунктирную линию, или обе из граничных линий представляют собой пунктирные линии).
[0034] Следует отметить, что вышеприведенный вариант осуществления представляет собой пример настоящего изобретения. В силу этого настоящее изобретение не ограничено вышеописанным вариантом осуществления, и различные изменения могут вноситься в соответствии с проектным решением и т.д. в качестве режимов, отличных от этого варианта осуществления, без отступления от технической идеи настоящего изобретения, как и следовало ожидать.
[0035] Данная заявка притязает на приоритет на основе заявки на патент Японии № 2016-133354, поданной 5 июля 2016 года, содержимое которой содержится в данном документе по ссылке.
Список позиционных обозначений
[0036] 1 - система управления движением
3 - контроллер приведения в движение транспортного средства
5 - контроллер двигателя
7 - камера
9 - модуль связи
11 - приемное GPS-устройство
13 - навигационное устройство
15 - радар
17 - датчик скорости транспортного средства
19 - контроллер помощи при вождении
21 - тормозное исполнительное устройство
25 - исполнительное устройство рулевого управления
100 - устройство управления движением
110 - модуль распознавания граничных линий
130 - модуль управления движением.
Изобретение относится к способу и устройству управления движением. Способ управления движением содержит этапы на которых, если ширина полосы движения для полосы движения увеличивается и определяется то, что одна из граничных линий представляет собой пунктирную линию, управляют движением рассматриваемого транспортного средства на основе пунктирной граничной линии. Если невозможно определять то, что одна из граничных линий представляет собой пунктирную линию и определяется то, что рассматриваемое транспортное средство движется на автостраде, управляют движением рассматриваемого транспортного средства только на основе граничной линии. Если невозможно определять то, что одна из граничных линий представляет собой пунктирную линию, и определяется то, что рассматриваемое транспортное средство движется по местной дороге, управляют движением рассматриваемого транспортного средства только на основе граничной линии. Устройство управления движением, которое распознает полосу движения и управляет движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения. Достигается соответствующее движение в пределах своей полосы для транспортного средства. 4 н.п. ф-лы, 3 ил.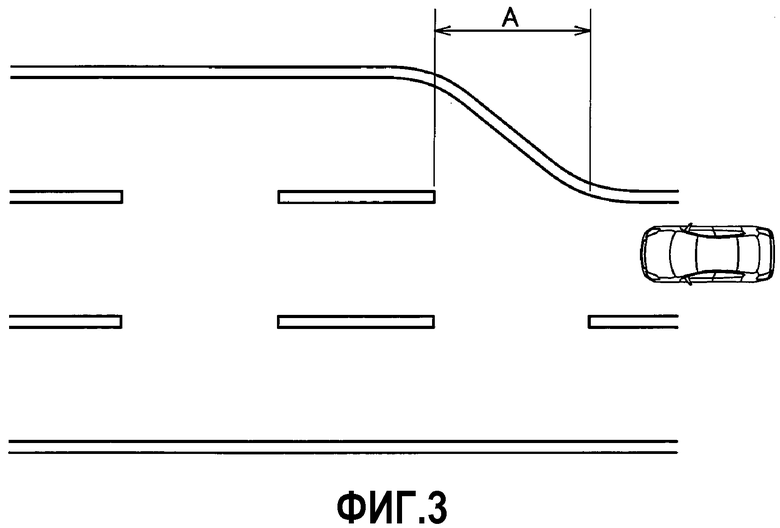
1. Способ управления движением, посредством которого устройство управления движением распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения,
- при этом способ управления движением содержит этапы, на которых, если ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается, и определяется то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, управляют движением рассматриваемого транспортного средства на основе пунктирной граничной линии, и
- если невозможно определять то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, и определяется то, что рассматриваемое транспортное средство движется на автостраде, управляют движением рассматриваемого транспортного средства только на основе граничной линии на стороне встречного транспортного средства.
2. Способ управления движением, посредством которого устройство управления движением распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения,
- при этом способ управления движением содержит этапы, на которых, если ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается, и определяется то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, управляют движением рассматриваемого транспортного средства на основе пунктирной граничной линии, и
- если невозможно определять то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, и определяется то, что рассматриваемое транспортное средство движется по местной дороге, управляют движением рассматриваемого транспортного средства только на основе граничной линии на стороне, противоположной относительно встречного транспортного средства.
3. Способ управления движением, посредством которого устройство управления движением распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения,
- при этом способ управления движением содержит этапы, на которых, если ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается, и определяется то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, управляют движением рассматриваемого транспортного средства на основе пунктирной граничной линии,
- если невозможно определять то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, и определяется то, что рассматриваемое транспортное средство движется на автостраде, управляют движением рассматриваемого транспортного средства только на основе граничной линии на стороне встречного транспортного средства, и
- если невозможно определять то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, и определяется то, что рассматриваемое транспортное средство движется по местной дороге, управляют движением рассматриваемого транспортного средства только на основе граничной линии на стороне, противоположной относительно встречного транспортного средства.
4. Устройство управления движением, которое распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство расположено в предварительно определенной позиции относительно граничной линии полосы движения, при этом:
- если ширина полосы движения для полосы движения, в которой движется рассматриваемое транспортное средство, увеличивается, и определяется то, что, одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, устройство управления движением управляет движением рассматриваемого транспортного средства на основе пунктирной граничной линии, и
- если невозможно определять то, что одна из граничных линий, расположенных слева и справа от рассматриваемого транспортного средства, представляет собой пунктирную линию, и определяется то, что рассматриваемое транспортное средство движется на автостраде, устройство управления движением управляет движением рассматриваемого транспортного средства только на основе граничной линии на стороне встречного транспортного средства.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ДОРОГИ, ФОРМЫ И ПОЛОЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ НА ДОРОГЕ, И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2571871C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2492083C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОЙ, ПРИ ПРОКАТКЕ ПЕТЛЯМИ, ПЕРЕДАЧИ МЕТАЛЛА ИЗ КЛЕТИ В КЛЕТЬ ИЛИ ИЗ РУЧЬЯ В РУЧЕЙ ОДНОЙ И ТОЙ ЖЕ КЛЕТИ СТАНА | 1926 |
|
SU20060A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

