РОДСТВЕННАЯ ЗАЯВКА
[0001] Эта заявка испрашивает приоритет заявки на патент Японии № 2016-159248, полное раскрытие которой включено в материалы настоящей заявки посредством ссылки.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] 1. Область техники, к которой относится изобретение
[0003] Настоящее изобретение относится к системе управления для и способу управления транспортным средством с автономным вождением.
[0004] 2. Предшествующий уровень техники
[0005] В данной области техники известно транспортное средство с автономным вождением, которое выдает уведомление водителю, если транспортное средство приближается к области, где автономное вождение может быть затруднено (например, смотрите публикацию японского патента № 2013-544695A). В одном из примеров, транспортное средство запрашивает управление рулевым механизмом, ускорением, замедлением, и т. д., у водителя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Однако, например, когда автономное вождение выполняется в течение относительно длительного периода времени, если прекращение автономного вождения, то есть, ручное вождение запрашивается у водителя, водитель может быть не способен быстро прекратить автономное вождение и начать ручное вождение. На этот счет, данная проблема может быть решена при условии непрерывного запрашивания прекращения автономного вождения у водителя, начиная значительно раньше того, как транспортное средство достигает точки, где водитель должен прекратить автономное вождение или начать ручное вождение. Однако, в этом случае, водитель может чувствовать себя обеспокоенным.
[0007] Согласно одному из вариантов осуществления настоящего изобретения, предусмотрена система управления для транспортного средства с автономным вождением, содержащая: операционное устройство, выполненное с возможностью приводиться в действие водителем; устройство уведомления, выполненное с возможностью выдавать уведомление водителю; и электронный блок управления, содержащий: часть управления вождением, выполненную с возможностью выполнять автономное вождение и прекращать автономное вождение и переключать вождение транспортного средства на ручное вождение, когда водитель приводит в действие операционное устройство во время автономного вождения; и часть управления уведомлением, выполненную с возможностью управлять устройством уведомления, чтобы сначала уведомлять водителя о запросе подготовки к ручному вождению, а затем, уведомлять водителя о запросе прекращения автономного вождения, когда водителя следует запросить прекратить автономное вождение во время автономного вождения.
[0008] Согласно еще одному варианту осуществления настоящего изобретения, предусмотрен способ управления для транспортного средства с автономным вождением, содержащего: операционное устройство, выполненное с возможностью приводиться в действие водителем; устройство уведомления, выполненное с возможностью выдавать уведомление водителю; и электронный блок управления, способ управления включает в себя этап выполнения автономного вождения и прекращения автономного вождения и переключения вождения транспортного средства на ручное вождение, когда водитель приводит в действие операционное устройство во время автономного вождения, с использованием электронного блока управления, способ управления дополнительно включает в себя этап управления устройством уведомления, чтобы сначала уведомляло водителя о запросе подготовки к ручному вождению, а затем, уведомляло водителя о запросе прекращения автономного вождения, когда водителя следует запросить прекратить автономное вождение во время автономного вождения, с использованием электронного блока управления.
[0009] Настоящее изобретение может быть полнее понятно из описания предпочтительных вариантов осуществления согласно настоящему изобретению, как изложено ниже, вместе с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Фиг. 1 - структурная схема системы управления для транспортного средства с автономным управлением по варианту осуществления согласно настоящему изобретению.
[0011] Фиг. 2 - схематический вид для пояснения внешнего датчика по варианту осуществления согласно настоящему изобретению.
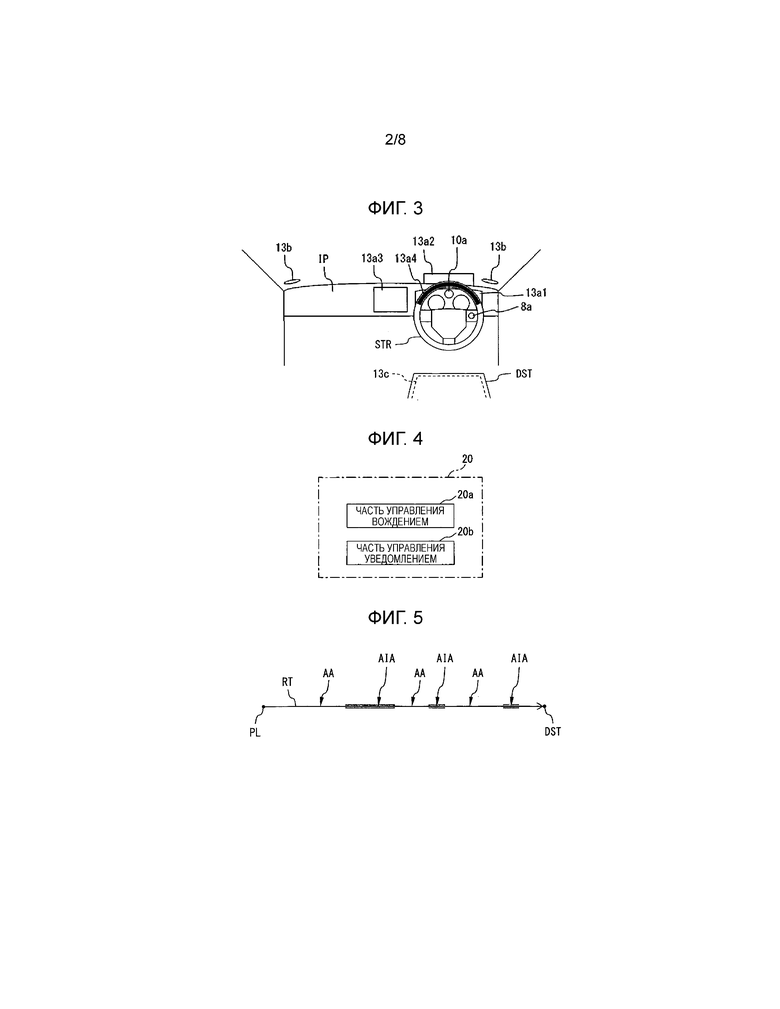
[0012] Фиг. 3 - вид, показывающий пассажирскую кабину по варианту осуществления согласно настоящему изобретению.
[0013] Фиг. 4 - структурная схема, показывающая функционирование электронного блока управления по варианту осуществления согласно настоящему изобретению.
[0014] Фиг. 5 - схематический вид одного из примеров целевого маршрута.
[0015] Фиг. 6 - схематический вид условий движения транспортного средства в варианте осуществления согласно настоящему изобретению.
[0016] Фиг. 7 - схематический вид, показывающий изменения со временем состояния водителя в случае, где не уведомляется о запросе подготовки к ручному вождению.
[0017] Фиг. 8 - схематический вид, показывающий изменения со временем состояния водителя в варианте осуществления согласно настоящему изобретению.
[0018] Фиг. 9 - вид, показывающий график второго интервала.
[0019] Фиг. 10 - вид, поясняющий зависимости между различными факторами и уровнем трудности ручного вождения.
[0020] Фиг. 11 - блок-схема последовательности операций способа, показывающая процедуру управления уведомлением по варианту осуществления согласно настоящему изобретению.
[0021] Фиг. 12 - блок-схема последовательности операций способа, показывающая процедуру управления приведением в действие по варианту осуществления согласно настоящему изобретению.
[0022] Фиг. 13 - схематический вид условий движения транспортного средства в еще одном варианте осуществления согласно настоящему изобретению.
[0023] Фиг. 14 - структурная схема системы управления для транспортного средства с автономным управлением в еще одном другом варианте осуществления согласно настоящему изобретению.
[0024] Фиг. 15 - блок-схема последовательности операций способа, показывающая процедуру управления уведомлением в еще одном другом варианте осуществления согласно настоящему изобретению.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0025] Фиг. 1 - структурная схема системы управления для транспортного средства с автономным управлением по варианту осуществления согласно настоящему изобретению. Со ссылкой на фиг. 1, система управления для транспортного средства с автономным вождением по варианту осуществления настоящего изобретения снабжена внешним датчиком 1, приемником 2 GPS, внутренним датчиком 3, базой 4 данных карт, навигационной системой 5, устройством 6 хранения, различными исполнительными механизмами 7, операционным устройством 8, устройством 9 хранения информации об областях, устройством 10 получения параметра состояния водителя, устройством 11 получения состояния области, устройством 12 регистрации движения, устройством 13 уведомления и электронным блоком 20 управления (ECU).
[0026] Внешний датчик 1 выполнен с возможностью выявлять информацию на внешней стороне или в окрестностях базового транспортного средства. Внешний датчик 1 снабжен по меньшей мере одним из лазерного локатора (устройства обнаружения и определения дальности с формированием лазерных изображений), радиолокатора и камеры. В варианте осуществления согласно настоящему изобретению, как показано на фиг. 2, внешний датчик 1 снабжен лазерными локаторами 1a, радиолокаторами 1b и камерой 1c.
[0027] Лазерный локатор 1a является устройством для выявления дороги, по которой движется базовое транспортное средство, или находящихся снаружи препятствий с использованием лазерных лучей. В примере, показанном на фиг. 2, четыре лазерных локатора 1a соответственно прикреплены к бамперам на четырех углах транспортного средства V. Лазерные локаторы 1a последовательно испускают лазерные лучи в направлении окрестностей базового транспортного средства V и измеряют расстояния до дороги и препятствий повсюду на дороге по отраженному свету, чтобы выявлять дорогу и препятствия вокруг базового транспортного средства V в виде трехмерного изображения. Трехмерное изображение дороги и препятствий, выявленных лазерными локаторами 1a, передается в электронный блок 20 управления. С другой стороны, радиолокатор 1b является устройством для выявления препятствий, находящихся снаружи базового транспортного средства V, с использованием электромагнитных волн. В примере, показанном на фиг. 2, четыре радиолокатора 1b прикреплены к бамперам на четырех углах транспортного средства V. Радиолокаторы 1b испускают электромагнитные волны из радиолокаторов 1b в окрестности базового транспортного средства V и измеряют расстояние до объектов в окрестностях базового транспортного средства V по отраженным волнам. Информация о препятствиях, выявленная радиолокаторами 1b, отправляется в электронный блок 20 управления. Камера 1c, в примере, показанном на фиг. 2, снабжена передней камерой, предусмотренной на внутренней стороне переднего стекла транспортного средства V. Передняя камера 1c захватывает цветное или монохромное изображение передней стороны из базового транспортного средства V. Информация цветного или монохромного изображения, полученная передней камерой 1c, передается в электронный блок 20 управления.
[0028] Приемник 2 GPS выполнен с возможностью принимать сигналы с трех или более спутников GPS, чтобы, тем самым, выявлять абсолютное положение базового транспортного средства V (например, широту и долготу базового транспортного средства V). Информация об абсолютном положении базового транспортного средства V, выявленная приемником 2 GPS, передается в электронный блок 20 управления.
[0029] Внутренний датчик 3 выполнен с возможностью выявлять условия движения транспортного средства V. Условия движения базового транспортного средства V выражаются по меньшей мере одним из скорости, ускорения и положения кузова базового транспортного средства. Внутренний датчик 3 снабжен одним или обоими из датчика скорости и IMU (блока инерциальных измерений) транспортного средства. В варианте осуществления согласно настоящему изобретению, внутренний датчик 3 снабжен датчиком скорости и IMU транспортного средства. Датчик скорости транспортного средства выявляет скорость базового транспортного средства V. IMU, например, снабжен трехкоординатным гироскопом и датчиком ускорений в трех направлениях, выявляет трехмерные угловую скорость и ускорение базового транспортного средства V и выявляет ускорение и положение кузова транспортного средства V на основании таковых. Информация об условиях движения транспортного средства V, выявленная внутренним датчиком 3, передается в электронный блок управления 20.
[0030] База 4 данных карт является базой данных, относящейся к информации карт. Эта база 4 данных карт, например, хранится на HDD (накопителе на жестком диске), установленном в транспортном средстве. Информация карт, например, включает в себя информацию о расположении дорог и информацию о формах дорог (например, ширине дорог, изогнутых или прямых, кривизне изгибов, расположениях перекрестков, точек слияния и точек разветвления, и т. д.).
[0031] Навигационная система 5 выполнена с возможностью направлять базовое транспортное средство V в пункт назначения, введенный водителем базового транспортного средства V в навигационную систему 5. Эта навигационная система 5 рассчитывает целевой маршрут до пункта назначения на основании информации о текущем местоположении базового транспортного средства V, выявленной приемником 2 GPS, и информации карт из базы 4 данных карт. Информация о целевом маршруте базового транспортного средства V передается в электронный блок 20 управления.
[0032] Устройство 6 хранения хранит дорожную карту, предназначенную специально для автономного вождения, подготовленную на основании трехмерных изображений препятствий, выявленных лазерными локаторами 1a, и результатов обнаружения лазерными локаторами 1a. Трехмерные изображения препятствий и дорожной карты постоянно или периодически обновляются.
[0033] Исполнительные механизмы 7 являются устройствами для управления операциями движения базового транспортного средства V в соответствии с сигналами управления из электронного блока 20 управления. Операции движения транспортного средства V включают в себя приведение в движение, торможение и рулевое управление транспортного средства V. Исполнительные механизмы 7 включают в себя по меньшей мере одно из исполнительного механизма приведения в движение, тормозного исполнительного механизма и исполнительного механизма рулевого управления. В варианте осуществления согласно настоящему изобретению, исполнительные механизмы 7 включают в себя исполнительный механизм приведения в движение, тормозной исполнительный механизм и исполнительный механизм рулевого управления. Исполнительный механизм приведения в движение управляет мощностью на выходе двигателя или электродвигателя, обеспечивающих мощность привода транспортного средства V, и, тем самым, управляет операцией приведения в движение транспортного средства V. Тормозной исполнительный механизм приводит в действие тормозную систему транспортного средства V и, тем самым, управляет операцией торможения транспортного средства V. Исполнительный механизм рулевого управления приводит в действие систему рулевого управления транспортного средства V и, тем самым, управляет операцией рулевого управления транспортного средства V.
[0034] Операционное устройство 8 выполнено с возможностью приводиться в действие водителем транспортного средства. Операционное устройство 8, например, снабжено по меньшей мере одним из кнопки управления, переключателя, рычага, сенсорной панели, устройства распознавания речи (микрофона), рулевого колеса, педали акселератора, и тормозной педали. В примере, показанном а фиг. 3, операционное устройство 8 снабжено функциональной кнопкой 8a. Кроме того, в примере, показанном на фиг. 3, функциональная кнопка 8a размещена на рулевом колесе STR. Сигнал, указывающий, что операционное устройство 8 было приведено в действие, отправляется в электронный блок 20 управления.
[0035] Устройство 9 хранения информации об областях выполнено с возможностью хранить по меньшей мере одну из информации о расположении областей, подходящих для автономного вождения, и информации о расположении областей, не подходящих для автономного вождения. Области, подходящие для автономного вождения, и области, не подходящие для автономного вождения будут пояснены позже.
[0036] Устройство 10 получения параметра состояния водителя выполнено с возможностью получать параметр состояния водителя. Параметр состояния водителя, например, выражается по меньшей мере одним из бдительности водителя, тенденции расположения взгляда водителя и продолжительности автономного вождения. Уровень бдительности водителя, например, выражается частотой моргания водителя, временем, в течение которого закрыты веки, и т. д. Например, когда частота моргания высока по сравнению с тем, когда частота моргания низка, уровень бдительности водителя является высоким. Тенденция расположения взгляда водителя, например, выражается соотношениями времени, в течение которого взгляд водителя направлен в переднюю область снаружи транспортного средства, времени, в течение которого взгляд водителя направлен в боковую область снаружи транспортного средства, и времени, в течение которого взгляд водителя направлен в заднюю область снаружи транспортного средства, и времени, в течение которого взгляд водителя направлен внутрь транспортного средства. Продолжительность автономного вождения является периодом времени, в течение которого автономное вождение продолжается при автономном вождении. В случае, где параметр состояния водителя выражается уровнем бдительности водителя или тенденцией расположения взгляда водителя, устройство 10 получения параметра состояния водителя, например, снабжено водительской камерой, прикрепленной внутри транспортного средства V, с тем чтобы быть обращенной на водителя. В случае, где параметр состояния водителя выражается продолжительностью автономного вождения, устройство 10 получения параметра состояния водителя снабжено таймером. Информация, относящаяся к параметру состояния водителя, полученному устройством 10 получения параметра состояния водителя, отправляется в электронный блок 20 управления.
[0037] В варианте осуществления согласно настоящему изобретению, как показано на фиг. 3, устройство 10 получения параметра состояния водителя снабжено водительской камерой 10a, прикрепленной к приборной панели IP транспортного средства V, с тем чтобы быть обращенной на водителя.
[0038] Устройство 11 получения состояния областей выполнено с возможностью получать информацию, относящуюся к состоянию области, не подходящей для автономного вождения. Состояние области, не подходящей для автономного вождения, например, выражается по меньшей мере одной из информации о погоде (например, любой из ясного неба, облачности, дождя, тумана или снега либо количества выпавшего дождя, количества выпавшего снега, уровня тумана, скорости ветра, и т. д.) и информации о движении транспорта (например, существования каких-нибудь дорожно-транспортных происшествий, уровня пробок, и т. д.) в рассматриваемых областях, не подходящих для автономного вождения. В варианте осуществления согласно настоящему изобретению, устройство 11 получения состояния областей, например, снабжено устройством приема информации и принимает информацию о погоде, информацию о движении транспорта, и т. д., отправленную извне транспортного средства. Информация, относящаяся к состоянию области, не подходящей для автономного вождения, полученная устройством 11 получения состояния областей, передается в электронный блок 20 управления.
[0039] Устройство 12 регистрации движения выполнено с возможностью сохранять запись движения транспортного средства V. Запись движения транспортного средства V включает в себя, проехало ли транспортное средство V по определенной дороге, количество раз, которое транспортное средство V проехало по определенной дороге, и т. д. Запись движения транспортного средства V передается в электронный блок 20 управления.
[0040] Устройство 13 уведомления выполнено с возможностью выдавать уведомление водителю. Например, это уведомление включает в себя визуальное уведомление, звуковое уведомление и уведомление телесным ощущением. В случае, где уведомление является визуальным уведомлением, устройство 13 уведомления снабжено устройством отображения, которое может видеть водитель. Устройство отображения, например, снабжено по меньшей мере одним из дисплея, лампы, и т. д. Например, дисплей включает в себя дисплей 13a1 измерительных приборов, предусмотренный в приборной панели IP за рулевым колесом STR, проекционный дисплей 13a2 на лобовом стекле, предусмотренный в приборной панели IP над дисплеем 13a1 измерительных приборов, центральный дисплей 13a3, предусмотренный в приборной панели IP по существе по центру в направлении ширины транспортного средства, и т. д., как показано на фиг. 3. Дисплей 13a1 измерительных приборов, например, отображает скорость транспортного средства, число оборотов двигателя, оставшееся количество топлива, оставшуюся емкость аккумуляторной батареи, и т. д. Центральный дисплей 13a3 используется, чтобы навигационная система 5 отображала целевой маршрут и отображала направление в пункт назначения («поверните налево на следующем перекрестке», и т. д.). В случае, где устройство 13 уведомления снабжено дисплеем, устройство 13 уведомления отображает текстовую информацию или графическую информацию на дисплее, чтобы выдавать уведомление водителю. С другой стороны, например, лампа включает в себя СИД 13a4 (светоизлучающий диод, LED), прикрепленный к рулевому колесу STR, как показано на фиг. 3. В случае, где устройство 13 уведомления снабжено лампой, устройство 13 уведомления включает лампу или мигает лампой, чтобы выдавать уведомление водителю.
[0041] С другой стороны, в случае, где уведомление является звуковым уведомлением, устройство 13 уведомления, например, снабжено громкоговорителем. Громкоговоритель, например, включает в себя пару громкоговорителей 13b, предусмотренных в верхней части приборной панели IP, как показано на фиг. 3. В случае, где устройство 13 уведомления снабжено громкоговорителями, устройство 13 уведомления испускает по меньшей мере один из речевого и звукового сигнала тревоги из громкоговорителей, чтобы выдавать уведомление водителю.
[0042] В случае, где уведомление является уведомление телесным ощущением, устройство 13 уведомления, например, снабжено вибратором, выдающим вибрацию на водителя. Вибратор, например, включает в себя вибратор 13c, встроенный в водительское сиденье, как показано на фиг. 3. В случае, где устройство 13 уведомления снабжено вибратором, устройство 13 уведомления заставляет вибратор действовать, чтобы выдавать уведомление водителю.
[0043] В варианте осуществления согласно настоящему изобретению, устройство 13 уведомления снабжено по меньшей мере одним из дисплея 13a1 измерительных приборов, проекционного дисплея 13a2 на лобовом стекле, центрального дисплея 13a3, СИД 13a4 рулевого колеса, громкоговорителей 13b и вибратора 13c. Устройство 13 уведомления управляется на основании сигнала управления из электронного блока 20 управления.
[0044] Электронный блок 20 управления является компьютером, снабженным компонентами, соединенными друг с другом двунаправленной шиной, такими как ПЗУ 21 (постоянное запоминающее устройство, ROM), ОЗУ 22 (оперативное запоминающее устройство, RAM), ЦПУ 23 (центральное процессорное устройство, CPU), и т. д. Фиг. 4 - структурная схема, показывающая функционирование электронного блока 20 управления по варианту осуществления согласно настоящему изобретению. В варианте осуществления согласно настоящему изобретению, электронный блок 20 управления снабжен частью 20a управления вождением и частью 20b управления уведомлением. Функции части 20a управления вождением и часть 20b управления уведомлением успешно выполняются посредством ПЗУ 21, ОЗУ 22, ЦПУ 23, и т. д. Часть 20a управления вождением и часть 20b управления уведомлением будут пояснены позже.
[0045] В варианте осуществления согласно настоящему изобретению, область, в которой транспортное средство V может двигаться, разделена на области, приспособленные или подходящие для автономного вождения, и области, не приспособленные или не подходящие для автономного вождения. Области, не подходящие для автономного вождения, например, включают в себя места, где сливаются дороги, места, где дороги разделяются, места со строительными работами, и т. д. Отметим, что, в варианте осуществления согласно настоящему изобретению, устройство 9 хранения информации об областях хранит информацию о расположении областей, не подходящих для автономного вождения, но не хранит информацию о расположении областей, подходящих для автономного вождения. Области, подходящие для автономного вождения, идентифицированы в качестве областей, иных, чем области, не подходящие для автономного вождения. В еще одном варианте осуществления (не показан), устройство 9 хранения информации об областях хранит только информацию о расположении областей, подходящих для автономного вождения. В этом случае, области, не подходящие для автономного вождения, идентифицированы в качестве областей, иных, чем области, подходящие для автономного вождения. В кроме того еще одном варианте осуществления (не показанном), устройство 9 хранения информации об областях хранит информацию о расположении областей, не подходящих для автономного вождения, и информацию о расположении областей, подходящих для автономного вождения.
[0046] Фиг. 5 схематически показывает один из примеров целевого маршрута RT из текущего местоположения PL транспортного средства V в пункт назначения, DST. В примере, показанном на фиг. 5, на целевом маршруте RT, области, подходящие для автономного вождения, AA, и области, не подходящие для автономного вождения, AIA, разбросаны. Поэтому, если транспортное средство V движется по целевому маршруту RT, будут случаи, где транспортное средство V движется через области, подходящие для автономного вождения, AA, и случаи, где оно движется через области, не подходящие для автономного вождения, AIA.
[0047] Итак, в варианте осуществления согласно настоящему изобретению, часть 20b управления уведомлением оценивает во время ручного вождения, возможно ли автономное вождение. Например, если транспортное средство V находится в области, подходящей для автономного вождения, AA, и внешнее состояние транспортного средства V может надежно выявляться внешним датчиком 1, делается вывод, что автономное вождение возможно. В противоположность этому, если транспортное средство V находится в области, не подходящей для автономного вождения, AIA, или внешнее состояние транспортного средства V не может надежно выявляться внешним датчиком 1, делается вывод, что автономное вождение невозможно. Если часть 20b управления уведомлением делает вывод, что автономное вождение возможно, часть 20b управления уведомлением управляет устройством 13 уведомления, чтобы уведомляло водителя, что автономное вождение возможно. Затем, если водитель приводит в действие операционное устройство 8, часть 20a управления вождением начинает автономное вождение. То есть, операции движения транспортного средства V, то есть, приведение в движение, торможение и рулевое управление, контролируются исполнительными механизмами 7. С другой стороны, если водитель приводит в действие операционное устройство 8 во время автономного вождения, часть 20a управления вождением прекращает автономное вождение и переключает вождение транспортного средства с автономного вождения на ручное вождение. В этом случае, операции движения транспортного средства V, то есть, приведение в движение, торможение и рулевое управление, выполняются водителем.
[0048] Отметим, что в случае, где операционное устройство 8 снабжено функциональной кнопкой 8a, действием для прекращения автономного вождения является нажатие функциональной кнопки 8a водителем во время автономного вождения. В качестве альтернативы, в случае, где операционное устройство 8 снабжено рулевым колесом, действием для прекращения автономного вождения является приведение в действие рулевого колеса водителем на предварительно определенную пороговую величину или более во время автономного вождения. В случае, где операционное устройство 8 снабжено педалью акселератора, действием для прекращения автономного вождения является нажатие педали акселератора водителем на предварительно определенную пороговую величину или более во время автономного вождения. В случае, где операционное устройство 8 снабжено тормозной педалью, действием для прекращения автономного вождения является нажатие тормозной педали водителем на предварительно определенную пороговую величину или более во время автономного вождения.
[0049] В области, не подходящей для автономного вождения, AIA, предпочтительно выполнять ручное вождение. Таким образом, в варианте осуществления согласно настоящему изобретению, когда транспортное средство V приближается к области, не подходящей для автономного вождения, AIA, на целевом маршруте RT, часть 20b управления уведомлением управляет устройством 13 уведомления во время автономного вождения, чтобы уведомляло водителя о запросе прекращения автономного вождения. То есть, водителю требуется привести в действие операционное устройство 8 для прекращения автономного вождения. Это будет дополнительно пояснено со ссылкой на фиг. 6. Отметим, что, в варианте осуществления согласно настоящему изобретению, если период времени, требуемый, чтобы транспортное средство V достигло области, не подходящей для автономного вождения, AIA, равен или короче, чем предварительно определенный установленный период времени, делается вывод, что транспортное средство V приблизилось к области, не подходящей для автономного вождения, AIA, тем временем, если требуемый период времени является большим, чем установленный период времени, делается вывод, что транспортное средство V не приблизилось к области, не подходящей для автономного вождения AIA.
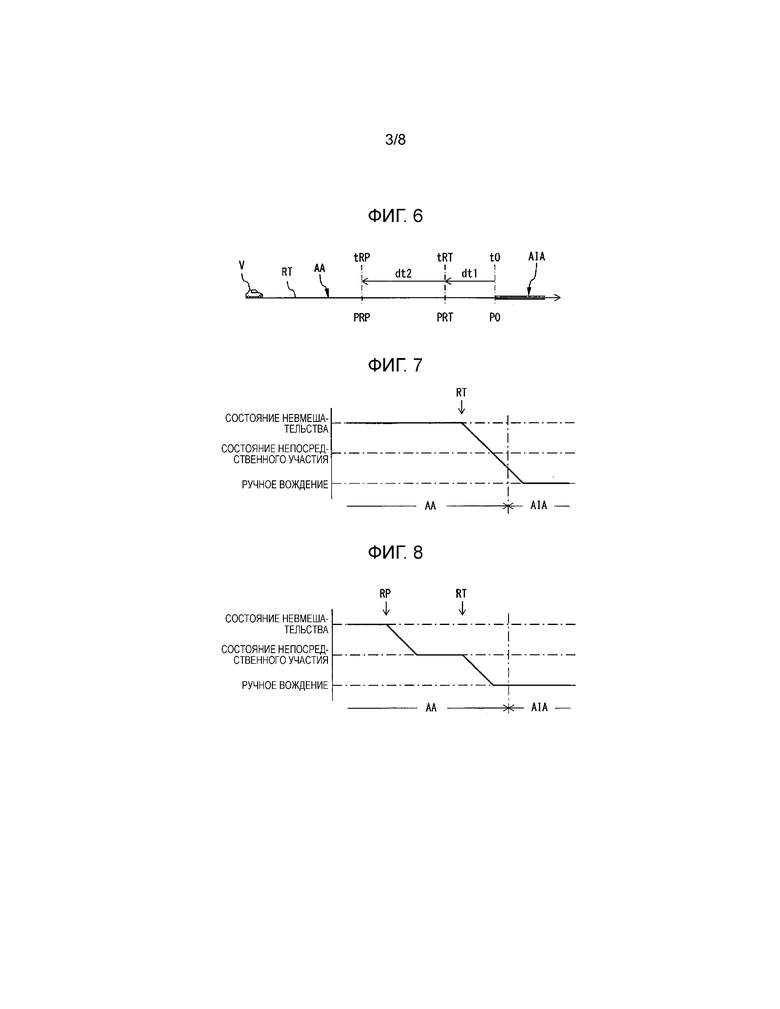
[0050] Фиг. 6 схематически показывает состояние, в котором транспортное средство V движется по целевому маршруту RT через область, подходящую для автономного вождения, AA, с помощью автономного вождения. На фиг. 6, t0 показывает момент, с которого транспортное средство V достигает области, не подходящей для автономного вождения, AIA, тем временем, P0 показывает начальное положение области, не подходящей для автономного вождения, AIA. В варианте осуществления согласно настоящему изобретению, часть 20b управления уведомлением назначает момент tRT за предварительно определенный первый интервал dt1 (например, постоянное значение) до момента t0, с которого транспортное средство V достигнет области, не подходящей для автономного вождения, AIA, в качестве момента уведомления касательно запроса прекращения и уведомляет водителя о запросе прекращения автономного вождения, когда наступил момент уведомления касательно запроса прекращения, tRT. Другими словами, когда транспортное средство V прибывает в расположение PRT, соответствующее моменту уведомления касательно запроса прекращения, tRT, часть 20b управления уведомлением уведомляет водителя о запросе прекращения автономного вождения. Отметим, что момент t0 прибытия рассчитывается по расстоянию от текущего местоположения транспортного средства V до начального положения P0 области, не подходящей для автономного вождения, AIA, и скорости транспортного средства V.
[0051] Водитель уведомляется о запросе прекращения автономного вождения, например, наподобие следующего способа. То есть, в одном из примеров, дисплей, такой как дисплей 13a1 измерительных приборов, проекционный дисплей 13a2 на лобовом стекле или центральный дисплей 13a3 отображает текстовую информацию, такую как «пожалуйста, прекратите автономное вождение». В еще одном примере, громкоговорители 13b вынуждаются издавать речевую информацию, такую как «пожалуйста, прекратите автономное вождение». В кроме того еще одном примере, вышеприведенная текстовая информация и речевая информация выдаются водителю с наложением. Выдача уведомления водителю с использованием множества элементов устройства 13 уведомления таким образом дает водителю возможность увереннее понимать или распознавать уведомление.
[0052] Кроме того, запрос прекращения автономного вождения, в одном из примеров, объявляется начиная с того, как наступает момент уведомления касательно запроса прекращения, tRT, до того, как операционное устройство 8 приведено в действие водителем. В еще одном примере, запрос прекращения автономного вождения объявляется, начиная с того, как наступает момент уведомления касательно запроса прекращения, tRT, до того, как истекает предварительно определенный постоянный период времени.
[0053] Если водитель приводит в действие операционное устройство 8 во время автономного вождения, как пояснено выше, автономное вождение прекращается, и начинается ручное вождение. С другой стороны, в варианте осуществления согласно настоящему изобретению, если водитель на приводит в действие операционное устройство 8, несмотря на то, что водитель уведомлен о запросе прекращения автономного вождения, часть 20a управления вождением выполняет обработку для остановки транспортного средства V. Более точно, например, транспортное средство V автоматически останавливается на обочине дороги. Это дает транспортному средству V возможность надежно эвакуироваться, например, в случае, где водитель потерял сознание, а потому, не может привести в действие операционное устройство 8.
[0054] В этом отношении, как пояснено в начале этого описания изобретения, когда водитель уведомлен о запросе прекращения автономного вождения, водитель может быть неспособен быстро прекращать автономное вождение и начинать ручное вождение.
[0055] Поэтому, в варианте осуществления согласно настоящему изобретению, дополнительно, когда часть 20b управления уведомлением должна уведомлять водителя о запросе прекращения автономного вождения, часть 20b управления уведомлением управляет устройством 13 уведомления, чтобы сначала уведомляло водителя о запросе подготовки к ручному вождению, а затем, уведомляло водителя о вышеупомянутом запросе прекращения автономного вождения. То есть, запрашивается, чтобы водитель создал условия для подготовки к ручному вождению. Это будет дополнительно пояснено со ссылкой на фиг. 6.
[0056] В варианте осуществления согласно настоящему изобретению, часть 20b управления уведомлением, как показано на фиг. 6, назначает момент tRP, за предварительно определенный второй интервал dt2 до момента уведомления касательно запроса прекращения, tRT, в качестве момента уведомления касательно запроса подготовки, и уведомляет водителя о запросе подготовки к ручному управлению, когда наступил момент уведомления касательно запроса подготовки, tRP. Другими словами, когда транспортное средство V прибывает в расположение PRP, соответствующее моменту уведомления касательно запроса подготовки, tRP, часть 20b управления уведомлением уведомляет водителя о запросе подготовки к автономному вождению.
[0057] В варианте осуществления согласно настоящему изобретению, условия для подготовки к ручному вождению включают в себя по меньшей мере состояние непосредственного участия. Состояние непосредственного участия, например, включает в себя состояние размещения водителем его или ее рук(и) на рулевом колесе STR, состояние захватывания водителем рулевого колеса STR, и т. д. В еще одном варианте осуществления (не показанном), условия для подготовки к ручному вождению включают в себя, в дополнение к состоянию непосредственного участия, состояние размещения водителем его или ее ступни на тормозной педали, состояние, в котором взгляд водителя направлен в переднюю сторону от транспортного средства, и т. д.
[0058] Запрос подготовки к ручному вождению, например, объявляется таким же образом, как запрос прекращения автономного вождения. То есть, в одном из примеров, дисплей, такой как дисплей 13a1 измерительных приборов, проекционный дисплей 13a2 на лобовом стекле или центральный дисплей 13a3 отображает текстовую информацию, такую как «пожалуйста, приготовьтесь к ручному вождению». В еще одном примере, громкоговорители 13b вынуждаются издавать речевую информацию «пожалуйста, приготовьтесь к ручному вождению». В кроме того еще одном примере, вышеприведенная текстовая информация и речевая информация выдаются водителю с наложением.
[0059] Кроме того, запрос подготовки к ручному вождению, в одном из примеров, объявляется, начиная с того, как наступает момент уведомления касательно запроса подготовки, tRP, до того, как наступает момент уведомления касательно запроса прекращения, tRT. В еще одном примере, запрос подготовки к ручному вождению объявляется, начиная с того, когда наступает момент уведомления касательно запроса подготовки, tRP, до того, как истекает предварительно определенный постоянный период времени. В кроме того еще одном примере, запрос подготовки к ручному вождению объявляется, начиная с того, когда наступает момент уведомления касательно запроса подготовки, tRP, до того, как водитель создает условия для подготовки к ручному вождению. В этом случае, предусмотрен датчик для выявления, что водитель создал условия для подготовки к ручному вождению. Этот датчик, например, включает в себя датчик касания рулевого колеса, выявляющий, что водитель находится в состоянии непосредственного участия.
[0060] Таким образом, в варианте осуществления согласно настоящему изобретению, водитель уведомляется о запросе подготовки к ручному вождению раньше, чем водитель уведомлен о запросе прекращения автономного вождения. Если водитель находится в состоянии для подготовки к ручному управлению, когда уведомлен о запросе прекращения автономного вождения, водитель может быстро прекращать автономное вождение и начинать ручное вождение.
[0061] Кроме того, запрос подготовки к ручному вождению не требует от водителя прекращения автономного вождения. То есть, водитель может создавать условия для подготовки к ручному вождению, тем временем, продолжая автономное вождение. Поэтому, водитель ограничен по ощущению себя обеспокоенным.
[0062] Таким образом, запрос подготовки к ручному вождению требует, чтобы водитель создавал условия для подготовки к ручному вождению, тем временем, водитель продолжает автономное вождение. Поэтому, запрос подготовки к ручному вождению полностью отличается по природе от запроса прекращения автономного вождения, который требует прекращения автономного вождения.
[0063] В этом отношении, условия для подготовки к ручному вождению, например, включают в себя состояние непосредственного участия, в котором водитель захватывает рулевое колесо, как пояснено выше. С другой стороны, во время автономного вождения, водитель может находиться в состоянии со снятием его или ее рук с рулевого колеса, то есть, может принимать состояние невмешательства.
[0064] Фиг. 7 и фиг. 8 схематически показывают изменения со временем состояний водителя. Фиг. 7 показывает случай, где запрос прекращения автономного вождения, RT, объявляется без уведомления о запросе подготовки к ручному вождению, когда автономное вождение находится в процессе выполнения, а водитель находится в состоянии невмешательства. В этом случае, состояние меняется с состояния невмешательства на состояние ручного вождения. В примере, показанном на фиг. 7, ручное вождение начинается после того, как транспортное средство V попадает в области, не подходящие для автономного вождения, AIA, что не является предпочтительным.
[0065] В противоположность этому, фиг. 8 показывает случай по варианту осуществления согласно настоящему изобретению, который является случаем, где сначала объявляется запрос подготовки к ручному вождению, RP, и затем объявляется запрос прекращения автономного вождения, RT, когда автономное вождение находится в процессе выполнения, а водитель находится в состоянии невмешательства. В этом случае, состояние водителя меняется с состояния невмешательства на состояние непосредственного участия, то есть, состояние для подготовки к ручному вождению, а затем, меняется с состояния непосредственного участия на состояние ручного вождения. В примере, показанном на фиг. 8, ручное вождение начинается непосредственно перед тем, как транспортное средство V достигает области, не подходящей для автономного вождения, AIA. Таким образом, в варианте осуществления согласно настоящему изобретению, состояние водителя переключается из состояния невмешательства, то есть, состояния автономного вождения, через состояние непосредственного участия, то есть, состояние для подготовки к ручному вождению, в состояние ручного вождения. Такой технической идеи до сих пор не существовало.
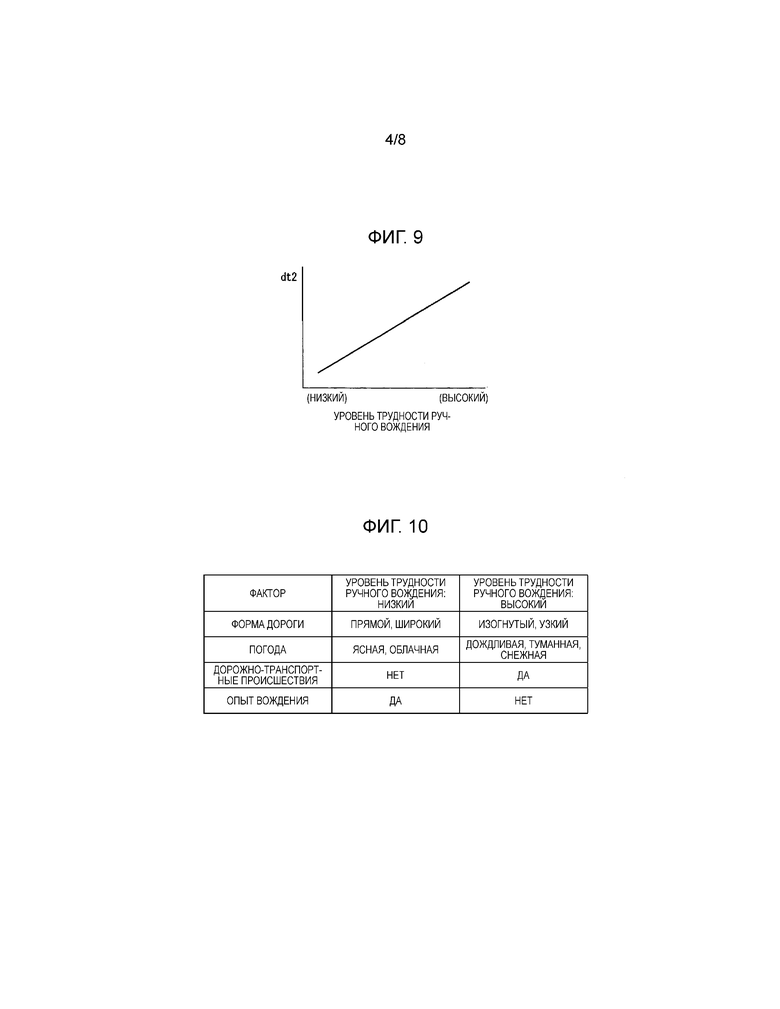
[0066] Затем, будут пояснены несколько примеров расчета второго интервала dt2, поясненного со ссылкой на фиг. 6. В первом примере расчета, часть 20b управления уведомлением рассчитывает второй интервал dt2 в соответствии с уровнем трудности ручного вождения в области, не подходящей для автономного вождения AIA, через которую должно быть проведено транспортное средство V. Более точно, как показано на фиг. 9, когда уровень трудности ручного вождения в области, не подходящей для автономного вождения, AIA, высок по сравнению с тем, когда уровень трудности ручного вождения низок, второй интервал dt2 делается более длительным. В этом случае, часть 20b управления уведомлением, например, находит уровень трудности ручного вождения следующим образом. То есть, как показано на фиг. 10, если дорога в области, не подходящей для автономного вождения, AIA, изогнута по форме по сравнению с тем, когда дорога прямая по форме, уровень трудности ручного вождения является более высоким. В качестве альтернативы, если ширина дороги в области, не подходящей для автономного вождения, AIA, мала по сравнению с тем, когда ширина дороги велика, уровень трудности ручного вождения является более высоким. В качестве альтернативы, если погода в области, не подходящей для автономного вождения, AIA, является дождливой, туманной или снежной по сравнению с тем, когда погода ясная или облачная, уровень трудности ручного вождения является более высоким. В качестве альтернативы, если дорожно-транспортное происшествие произошло в области, подходящей для автономного вождения, AIA, по сравнению с тем, когда дорожно-транспортное происшествие не произошло в области, не подходящей для автономного вождения, AIA, уровень трудности ручного вождения является более высоким. В качестве альтернативы, если водитель не имеет опыта с вождением через область, непригодную для автономного вождения, AIA, по сравнению с тем, когда водитель обладает опытом с вождением через область, непригодную для автономного вождения, AIA, уровень трудности ручного вождения является более высоким. То есть, в первом примере расчета, если уровень трудности ручного вождения в области, не подходящей для автономного вождения, AIA, является более высоким, момент уведомления, tRP, о запросе подготовки к ручному вождению, делается более ранним. Поэтому, водитель может полнее приготавливаться к ручному вождению. Кроме того, если уровень трудности ручного вождения в области, не подходящей для автономного вождения, AIA, низок, момент уведомления, tRP, о запросе подготовки к ручному вождению задерживается, а потому, водитель дополнительно ограничивается по ощущению себя обеспокоенным.
[0067] Во втором примере расчета, часть 20b управления уведомлением рассчитывает второй интервал dt2 в соответствии с параметром состояния водителя, полученным устройством 10 получения параметра состояния водителя. В варианте осуществления согласно настоящему изобретению, параметр состояния водителя, полученный устройством 10 получения параметра состояния водителя, представляет собой подготовительное время, которое является периодом времени, требуемым, чтобы водитель создавал условия для подготовки к ручному вождению. То есть, в случае, где параметр состояния водителя выражается уровнем бдительности водителя, если уровень бдительности водителя низок по сравнению с тем, когда уровень бдительности высок, подготовительное время является более длительным. В качестве альтернативы, например, в случае, где параметр состояния водителя выражается тенденцией расположения взгляда водителя, если соотношение времени, в течение которого взгляд водителя направлен в переднюю сторону от транспортного средства, мало по сравнению с тем, когда соотношение времени велико, подготовительное время является более длительным. В качестве альтернативы, в случае, где параметр состояния водителя выражается продолжительностью автономного вождения, если продолжительность автономного вождения велика по сравнению с тем, когда продолжительность автономного вождения мала, подготовительное время является более длительным.
[0068] Поэтому, во втором примере расчета, если подготовительный период времени продолжителен по сравнению с тем, когда подготовительный период времени короток, второй интервал dt2 делается более длительным. То есть, в случае, где параметр состояния водителя выражается уровнем бдительности водителя, если уровень бдительности водителя низок по сравнению с тем, когда уровень бдительности высок, второй интервал dt2 делается более длительным. В качестве альтернативы, например, в случае, где параметр состояния водителя выражается тенденцией расположения взгляда водителя, если соотношение времени, в течение которого взгляд водителя направлен в переднюю сторону от транспортного средства, мало по сравнению с тем, когда соотношение времени велико, второй интервал dt2 делается более длительным. В качестве альтернативы, в случае, где параметр состояния водителя выражается продолжительностью автономного вождения, если продолжительность автономного вождения велика по сравнению с тем, когда продолжительность автономного вождения мала, второй интервал dt2 делается более длительным. Как результат, водитель может надежно создавать условия для подготовки к ручному вождению, начиная с того, как уведомлен о запросе подготовки к ручному вождению, до того, как уведомлен о запросе прекращения автономного вождения, тем временем, водитель ограничен по ощущению себя обеспокоенным.
[0069] В третьем примере расчета, часть 20b управления уведомлением рассчитывает второй интервал dt2 в соответствии с уровнем трудности ручного вождения в области, не подходящей для автономного вождения AIA, и параметра состояния водителя. То есть, если уровень трудности ручного вождения является более высоким, а подготовительное время большим по сравнению с тем, когда уровень трудности ручного вождения является более низким, а подготовительное время меньшим, второй интервал dt2 делается более длительным.
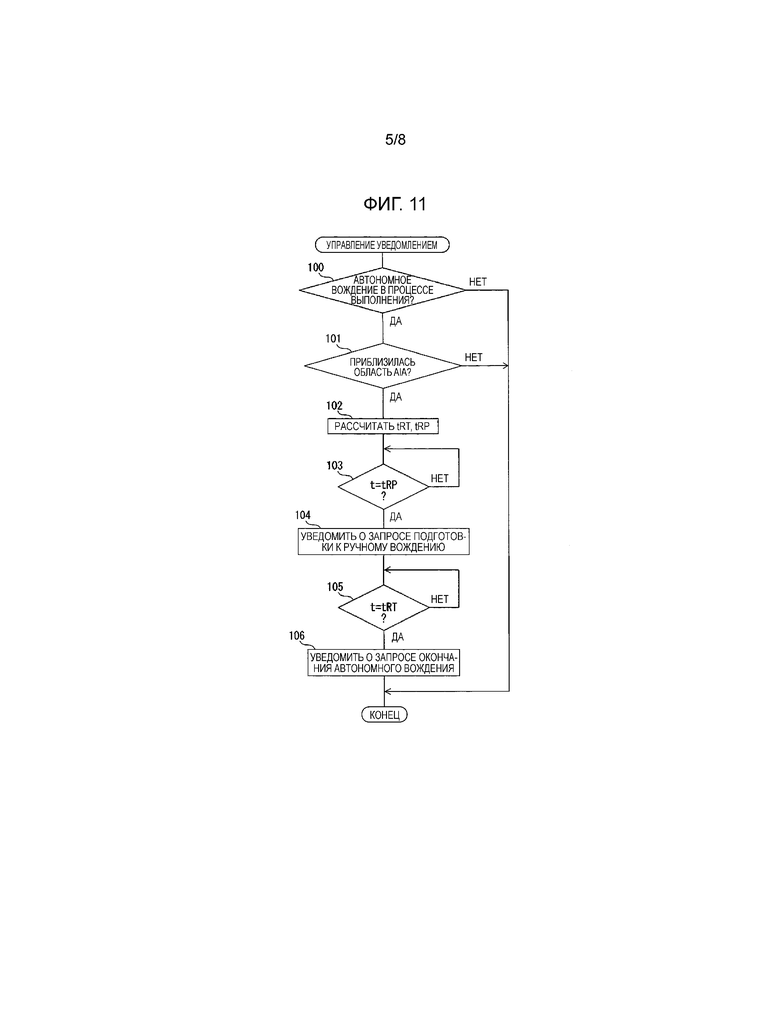
[0070] Фиг. 11 показывает процедуру для выполнения вышеупомянутого управления уведомлением по варианту осуществления согласно настоящему изобретению. Со ссылкой на фиг. 11, на этапе 100, оценивается, находится ли транспортное средство V в процессе автономного вождения. Если транспортное средство V не находится в процессе автономного вождения, то есть, если оно находится в процессе ручного вождения, цикл обработки заканчивается. Если транспортное средство V находится в процессе автономного вождения, затем, процедура переходит на этап 101, где оценивается, приблизилось ли транспортное средство V к области, не подходящей для автономного вождения, AIA. Если сделан вывод, что транспортное средство V не приблизилось к области, не подходящей для автономного вождения, AIA, цикл обработки заканчивается. Если делается вывод, что транспортное средство V приблизилось к области, не подходящей для автономного вождения, AIA, процедура переходит на этап 102, где рассчитываются момент tRT уведомления касательно запроса прекращения и момент tRP уведомления касательно подготовки. На следующем этапе 103, оценивается, наступил ли момент tRP уведомления касательно запроса подготовки. Если момент tRP уведомления касательно запроса подготовки не наступил, процедура возвращается на этап 103. Если момент tRP уведомления касательно запроса подготовки наступил, затем, процедура переходит на этап 104, где водитель уведомляется о запросе подготовки к ручному вождению. На следующем этапе 105, оценивается, наступил ли момент tRT уведомления касательно запроса прекращения. Если момент tRT уведомления касательно запроса прекращения не наступил, процедура возвращается на этап 105. Если момент tRT уведомления касательно запроса прекращения наступил, затем, процедура переходит на этап 106, где водитель уведомляется о запросе прекращения автономного вождения.
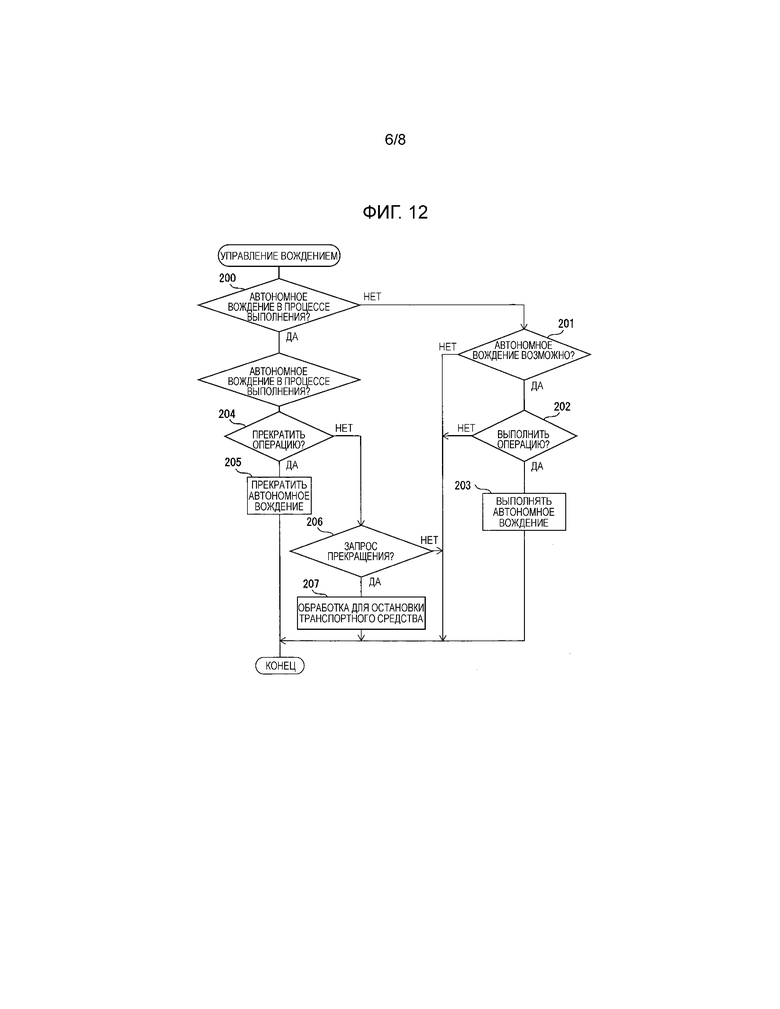
[0071] Фиг. 12 показывает процедуру для выполнения вышеупомянутого управления вождением по варианту осуществления согласно настоящему изобретению. Эта процедура выполняется через перерыв каждый предварительно определенный установленный период времени. Со ссылкой на фиг. 12, на этапе 200, оценивается, находится ли автономное вождение в процессе выполнения. Если автономное вождение не находится в процессе выполнения, то есть, в процессе выполнения находится ручное вождение, затем, процедура переходит на этап 201, где оценивается, возможно ли автономное вождение. Если автономное вождение невозможно, цикл обработки заканчивается. Если автономное вождение возможно, процедура затем переходит на этап 202, где оценивается, привел ли водитель в действие операционное устройство 8 для выполнения автономного вождения. Если операционное устройство 8 не было приведено в действие, цикл обработки заканчивается. Если операционное устройство 8 было приведено в действие, затем, процедура переходит на этап 203, где выполняется автономное вождение.
[0072] С другой стороны, если автономное вождение находится в процессе выполнения, процедура переходит с этапа 200 на этап 204, где оценивается, привел ли водитель в действие операционное устройство 8 для прекращения автономного вождения. Если операционное устройство 8 было приведено в действие, затем, процедура переходит на этап 205, где автономное вождение прекращается. То есть, начинается ручное вождение. В противоположность этому, если операционное устройство 8 не было приведено в действие, процедура переходит с этапа 204 на этап 206, где оценивается, был ли водитель уведомлен о запросе прекращения автономного вождения. Если не уведомлен о запросе прекращения автономного вождения, цикл обработки заканчивается. Если уведомлен о запросе прекращения автономного вождения, то есть, если водитель не привел в действие операционное устройство 8, несмотря на получение уведомления о запросе прекращения автономного вождения, процедура затем переходит на этап 207, где выполняется обработка для остановки транспортного средства. Отметим, что, в варианте осуществления согласно настоящему изобретению, если водитель не приводит в действие операционное устройство 8, несмотря на определенный период времени, истекший от того, как был уведомлен о запросе прекращения автономного вождения, выполняется обработка для остановки транспортного средства.
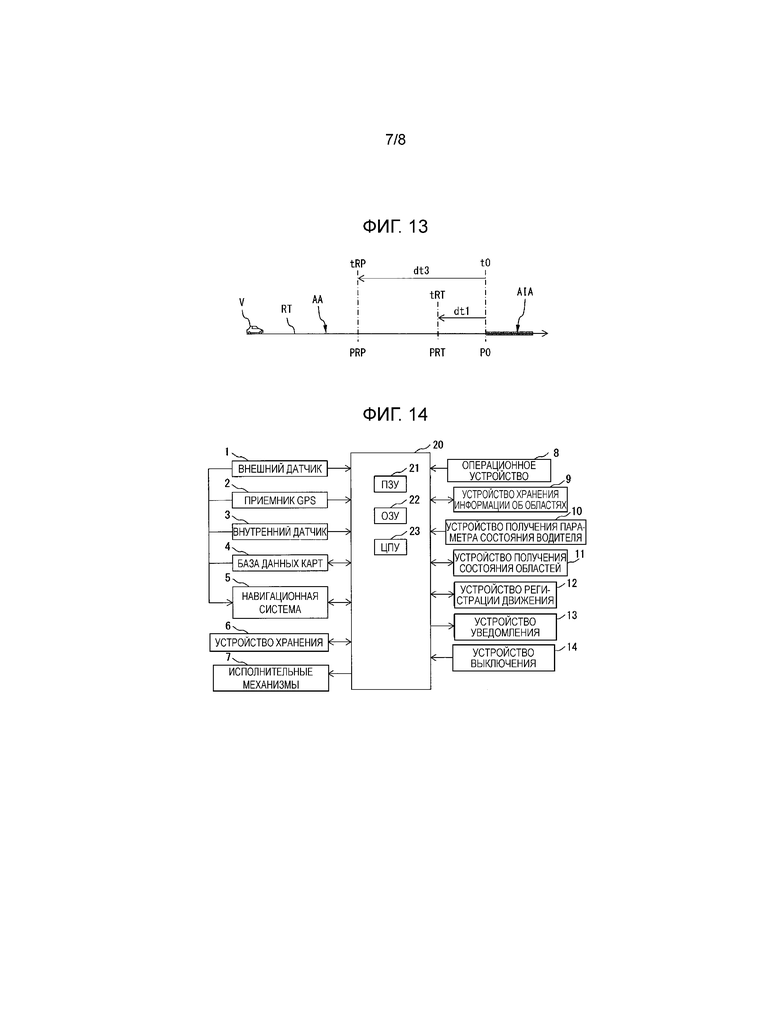
[0073] Фиг. 13 показывает еще один вариант осуществления согласно настоящему изобретению. В варианте осуществления, показанном на фиг. 13, часть 20b управления уведомлением назначает момент tRP за предварительно определенный интервал до t0, когда транспортное средство V достигнет области, не подходящей для автономного вождения, AIA, в качестве момента уведомления касательно запроса подготовки, и уведомляет водителя о запросе подготовки к ручному вождению, когда наступает момент уведомления касательно запроса подготовки, tRP.
[0074] Часть 20b управления уведомлением рассчитывает третий интервал dt3, например, таким же образом, как второй интервал dt2. То есть, в одном из примеров, третий интервал dt3 рассчитывается в соответствии с уровнем трудности ручного вождения в области, не подходящей для автономного вождения AIA, через которую собирается двигаться транспортное средство V. В еще одном примере, третий интервал dt3 рассчитывается в соответствии с параметром состояния водителя. В еще одном другом примере, третий интервал dt3 рассчитывается в соответствии с уровнем трудности ручного вождения в области, не подходящей для автономного вождения AIA, и параметром состояния водителя.
[0075] В варианте осуществления, также показанном на фиг. 13, возможно, чтобы водитель надежно создавал условия для подготовки к ручному вождению, начиная того, как уведомлен о запросе подготовки к ручному вождению, до того, как уведомлен о запросе прекращения автономного вождения, тем временем, ограничивая ощущение водителя себя обеспокоенным.
[0076] Фиг. 14 показывает еще один другой вариант осуществления согласно настоящему изобретению. В варианте осуществления, показанном на фиг. 14, система управления для транспортного средства с автономным вождением дополнительно содержит устройство 14 выключения, выполненное с возможностью приводиться в действие водителем транспортного средства. Устройство 14 выключения, например, снабжено по меньшей мере одним из функциональной кнопки, переключателя, рычага, сенсорной панели и устройства распознавания речи (микрофона). Сигнал, указывающий, что устройство 14 выключения было приведено в действие, отправляется в электронный блок 20 управления. Электронный блок 20 управления в варианте осуществления, показанном на фиг. 14, также снабжен частью 20a управления вождением и частью 20b управления уведомлением аналогично электронному блоку 20 управления в варианте осуществления, показанном на фиг. 1.
[0077] В варианте осуществления согласно настоящему изобретению, поясненному выше, если водителя следует запросить прекратить автономное вождение во время автономного вождения, водитель всегда сначала уведомляется о запросе подготовки к ручному вождению, а затем, уведомляется о запросе прекращения автономного вождения. В противоположность этому, в варианте осуществления, показанном на фиг. 14, если водителя следует запросить прекратить автономное вождение во время автономного вождения после того, как водитель приводит в действие устройство 14 выключения, часть 20b управления уведомлением уведомляет водителя о запросе прекращения автономного вождения, не уведомляя водителя о запросе подготовки к ручному вождению. С другой стороны, до тех пор, пока водитель не приводит в действие устройство 14 выключения, часть 20b управления уведомлением уведомляет водителя о запросе подготовки к ручному вождению и о запросе прекращения автономного вождения.
[0078] Может ли водитель быстро начать ручное вождение, когда водитель уведомлен о запросе прекращения работы автономного вождения, зависит от навыка и опытности водителя. Поэтому, если о запросе подготовки к ручному вождению уведомляется водитель, который может быстро начать ручное вождение, водитель может чувствовать себя обеспокоенным. В варианте осуществления, показанном на фиг. 14, в таком случае, водитель может выключать уведомление о запросе подготовки к ручному вождению, а потому, можно ограничивать ощущение водителя себя обеспокоенным.
[0079] Отметим, что, в варианте осуществления, показанном на фиг. 14, когда уведомление о запросе подготовки к ручному вождению выведено из работы, если устройство 14 выключения вновь приведено в действие водителем, уведомление о запросе подготовки к ручному вождению вновь включается. Поэтому, можно переключаться между включением и выключением уведомления запроса подготовки к ручному вождению, например, в зависимости от водителей.
[0080] Фиг. 15 показывает процедуру для выполнения управления для уведомления по варианту осуществления, показанному на фиг. 14. Ниже будут пояснены различия между процедурой, показанной на фиг. 15, и процедурой, показанной на фиг. 11. Если, на этапе 101, сделан вывод, что транспортное средство V достигло области, не подходящей для автономного вождения AIA, затем, процедура переходит на этап 101a, где оценивается, следует ли вывести из работы уведомление о запросе подготовки к ручному вождению. Если уведомление о запросе подготовки к ручному вождению не следует выключать, затем, процедура переходит на этап 102. С другой стороны, если уведомление о запросе подготовки к ручному вождению должно быть выведено из работы, затем, процедура переходит на этап 102a, где рассчитывается момент уведомления касательно запроса прекращения, tRT. Иначе, процедура переходит на этап 105.
[0081] Отметим, что, в варианте осуществления, показанном на фиг. 14, операционное устройство 8 и устройство 14 выключения являются взаимно разными устройствами. Однако, пока возможно проводить различие между тем, когда действие водителя является действием для выключения уведомления о запросе подготовки к ручному вождению или действием для прекращения или запуска автономного вождения, операционное устройство 8 и устройство 14 выключения могут быть идентичными устройствами друг с другом.
[0082] Можно ограничивать ощущение водителя себя обеспокоенным, тем временем, давая водителю возможность быстрее начинать ручное вождение.
[0083] Несмотря на то, что настоящее изобретение было описано посредством ссылки на конкретные варианты осуществления, выбранные в целях иллюстрации, должно быть очевидно, что многочисленные модификации могли бы быть произведены в них специалистами в данной области техники, не выходя из основной концепции и объема настоящего изобретения.


Изобретение относится к системам управления транспортным средством. Система управления транспортным средством с автономным вождением содержит операционное устройство, устройство уведомления и электронный блок управления. Электронный блок управления содержит часть управления вождением и часть управления уведомлением. Часть управления вождением выполнена с возможностью выполнять автономное вождение и переключать вождение транспортного средства на ручное вождение, когда водитель приводит в действие операционное устройство во время автономного вождения. Часть управления уведомлением выполнена с возможностью управлять устройством уведомления, чтобы сначала уведомлять водителя о запросе подготовки к ручному вождению, а затем уведомлять водителя о запросе прекращения автономного вождения. Достигается повышение безопасности управления транспортным средством. 2 н. и 8 з.п. ф-лы, 15 ил.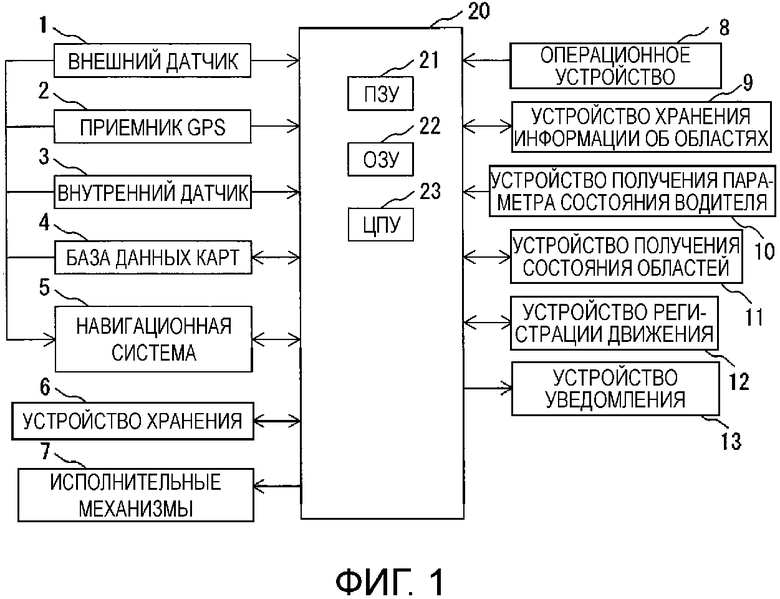
1. Система управления транспортным средством с автономным вождением, содержащая:
операционное устройство, выполненное с возможностью приводиться в действие водителем;
устройство уведомления, выполненное с возможностью выдавать уведомление водителю; и
электронный блок управления, содержащий:
часть управления вождением, выполненную с возможностью выполнять автономное вождение и прекращать автономное вождение и переключать вождение транспортного средства на ручное вождение, когда водитель приводит в действие операционное устройство во время автономного вождения; и
часть управления уведомлением, выполненную с возможностью управлять устройством уведомления, чтобы сначала уведомлять водителя о запросе подготовки к ручному вождению, а затем уведомлять водителя о запросе прекращения автономного вождения, когда водителя следует запросить прекратить автономное вождение во время автономного вождения.
2. Система управления транспортным средством с автономным вождением по п. 1, в которой часть управления уведомлением выполнена с возможностью уведомлять водителя о запросе прекращения автономного вождения за предварительно определенный первый интервал до момента, когда транспортное средство прибудет в предварительно определенную область, не подходящую для автономного вождения.
3. Система управления транспортным средством с автономным вождением по п. 2, в которой часть управления уведомлением выполнена с возможностью уведомлять водителя о запросе подготовки к ручному вождению за предварительно определенный второй интервал до момента уведомления водителя о запросе прекращения автономного вождения.
4. Система управления транспортным средством с автономным вождением по п. 3, в которой часть управления уведомлением выполнена с возможностью рассчитывать второй интервал в соответствии с уровнем трудности ручного вождения в области, не подходящей для автономного вождения.
5. Система управления транспортным средством с автономным вождением по п. 3 или 4, дополнительно содержащая устройство получения параметра состояния водителя, выполненное с возможностью получать параметр состояния водителя,
при этом часть управления уведомлением выполнена с возможностью рассчитывать второй интервал в соответствии с параметром состояния водителя, полученным устройством получения параметра состояния водителя.
6. Система управления транспортным средством с автономным вождением по п. 1 или 2, в которой часть управления уведомлением выполнена с возможностью уведомлять водителя о запросе подготовки к ручному вождению за предварительно определенный третий интервал до момента, когда транспортное средство прибудет в предварительно определенную область, не подходящую для автономного вождения.
7. Система управления транспортным средством с автономным вождением по п. 6, в которой часть управления уведомлением выполнена с возможностью рассчитывать третий интервал в соответствии с уровнем трудности ручного вождения в области, не подходящей для автономного вождения.
8. Система управления транспортным средством с автономным вождением по п. 6 или 7, дополнительно содержащая устройство получения параметра состояния водителя, выполненное с возможностью получать параметр состояния водителя,
при этом часть управления уведомлением выполнена с возможностью рассчитывать третий интервал в соответствии с параметром состояния водителя, полученным устройством получения параметра состояния водителя.
9. Система управления транспортным средством с автономным вождением по любому из пп. с 1 по 8, дополнительно содержащая устройство выключения, выполненное с возможностью приводиться в действие водителем,
при этом часть управления уведомлением выполнена с возможностью управлять устройством уведомления, чтобы оно уведомляло водителя о запросе прекращения автономного вождения, не уведомляя водителя о запросе подготовки к ручному вождению, если водителя следует запросить прекратить автономное вождение во время автономного вождения после того, как водитель приводит в действие устройство выключения.
10. Способ управления транспортным средством с автономным вождением, содержащим:
операционное устройство, выполненное с возможностью приводиться в действие водителем;
устройство уведомления, выполненное с возможностью выдавать уведомление водителю; и
электронный блок управления,
при этом способ управления включает в себя этап, на котором выполняют автономное вождение и прекращают автономное вождение и переключают вождение транспортного средства на ручное вождение, когда водитель приводит в действие операционное устройство во время автономного вождения, с использованием электронного блока управления,
способ управления дополнительно включает в себя этап, на котором управляют устройством уведомления, чтобы оно сначала уведомляло водителя о запросе подготовки к ручному вождению, а затем уведомляло водителя о запросе прекращения автономного вождения, когда водителя следует запросить прекратить автономное вождение во время автономного вождения, с использованием электронного блока управления.
| Токарный резец | 1924 |
|
SU2016A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| 0 |
|
SU154876A1 |

