ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[1] Настоящее раскрытие относится к пылесосу и способу его управления.
Предпосылки изобретения
[2] Обычно, пылесосом является устройство, которое всасывает пыль и инородные вещества, рассыпанные по поверхности, подлежащей очистке, с использованием всасывающего электродвигателя, установленного внутри основного корпуса, и отфильтровывает пыль и инородные вещества в основном корпусе.
[3] Пылесос, имеющий такую функцию, может подразделяться на вертикальный тип, в котором всасывающая насадка в виде всасывающего отверстия выполнена как одно целое с основным корпусом, и контейнерный тип, в котором всасывающая насадка находится в сообщении с основным корпусом через соединительную трубку.
[4] При этом, в корейской патентной публикации №.2010-0053098 (опубликованной 20 мая 2010 г.) раскрыт пылесос.
[5] Пылесос включает в себя колесо, которое обеспечивает легкое перемещение, и приводной блок, который приводит в движение колесо. Пылесос определяет вращательное и поступательное движение подвижного элемента и управляет работой приводного блока.
[6] Поскольку такой пылесос должен иметь конструкцию, которая обеспечивает вращение подвижного элемента и, кроме того, одновременно осуществлять поступательное движение, пылесос имеет сложную конструкцию. Кроме того, поскольку пылесос может определять механическое движение и может перемещать приводной блок, но не может точно определять действительное перемещение пользователя, трудно, чтобы корпус пылесоса перемещался точно к пользователю. И поскольку пылесос не может распознавать впереди препятствие, существует опасность столкновения с препятствием. При осуществлении пользователем процесса очистки при удержании корпуса пылесоса для очистки области помимо пола, подвижный элемент может осуществлять поступательное движение или вращательное движение. В этом случае, поскольку колесо пылесоса может вращаться с помощью приводного блока, пользователь может получить повреждение вращающимся колесом, или одежда пользователя может застрять в зазоре между колесом и корпусом пылесоса.
Раскрытие изобретения
Техническая проблема
[7] Настоящее раскрытие относится к созданию пылесоса, в котором корпус пылесоса может распознавать препятствие и перемещаться в направлении перемещения пользователя при обхождении препятствия, и способу его управления.
Решение проблемы
[8] В одном аспекте настоящего изобретения описан пылесос, включающий в себя корпус, имеющий подвижный узел для перемещения, всасывающий узел, соединенный с корпусом пылесоса, выполненный с возможностью всасывания пыли и воздуха и направления всасываемой пыли и воздуха в корпус пылесоса, и имеющий ручку, первое устройство обнаружения, выполненное с возможностью определения перемещения всасывающего узла, второе устройство обнаружения, расположенное на корпусе пылесоса, для обнаружения препятствия, и блок управления, выполненный с возможностью определения заданного местоположения, в которое корпус пылесоса будет перемещаться на основании информации, полученной первым устройством обнаружения, определения маршрута перемещения к заданному местоположению на основании определенного заданного местоположения и препятствия, определенного вторым устройством обнаружения, и управления подвижным узлом таким образом, что корпус пылесоса перемещается по определенному маршруту перемещения.
[9] Маршрут перемещения может быть маршрутом с обходом, по которому корпус пылесоса перемещается при обходе препятствия.
[10] В другом аспекте настоящего изобретения описан способ управления пылесосом, включающий в себя определение наличия или отсутствия препятствия и определение перемещения всасывающего узла, соединенного с корпусом пылесоса, и установку заданного местоположения, в которое пылесос будет перемещаться, определение маршрута перемещения корпуса пылесоса на основании препятствия и заданного местоположения, в которое корпус пылесоса будет перемещаться, и управление корпусом пылесоса для перемещения по маршруту перемещения.
Положительные результаты изобретения
[11] В соответствии с предложенным изобретением, когда необходимо перемещать корпус пылесоса в направлении, в котором перемещается пользователь, его можно перемещать при обходе препятствия на маршруте к конечному пункту маршрута, в котором находится пользователь, и, таким образом, корпус пылесоса может быстро и точно перемещаться в направлении, в котором перемещается пользователь.
[12] Кроме того, поскольку определяется подъем корпуса пылесоса, и вращение колес регулируется, пользователь может быть предотвращен от получения повреждения вследствие вращения колес.
[13] Кроме того, поскольку вращение колес предотвращено при определении подъема корпуса пылесоса, одежда пользователя может быть предотвращена от защемления в зазоре между колесом и корпусом пылесоса вследствие вращения колес.
Краткое описание чертежей
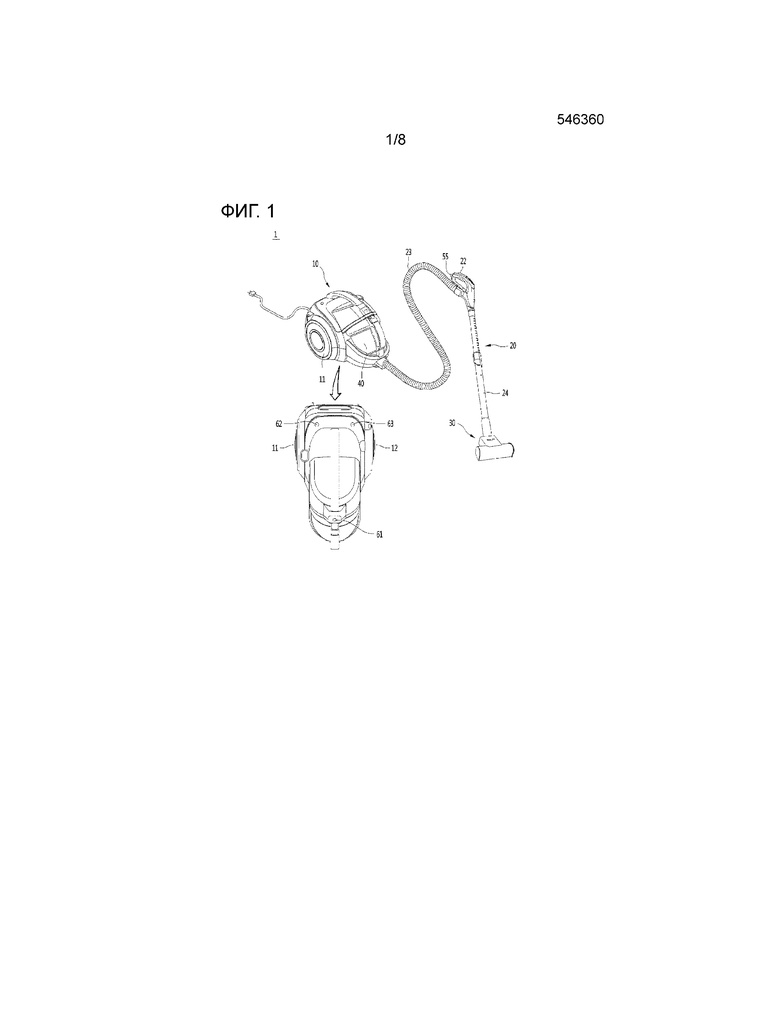
[14] Фиг.1 - перспективный вид пылесоса в соответствии с одним вариантом осуществления настоящего изобретения;
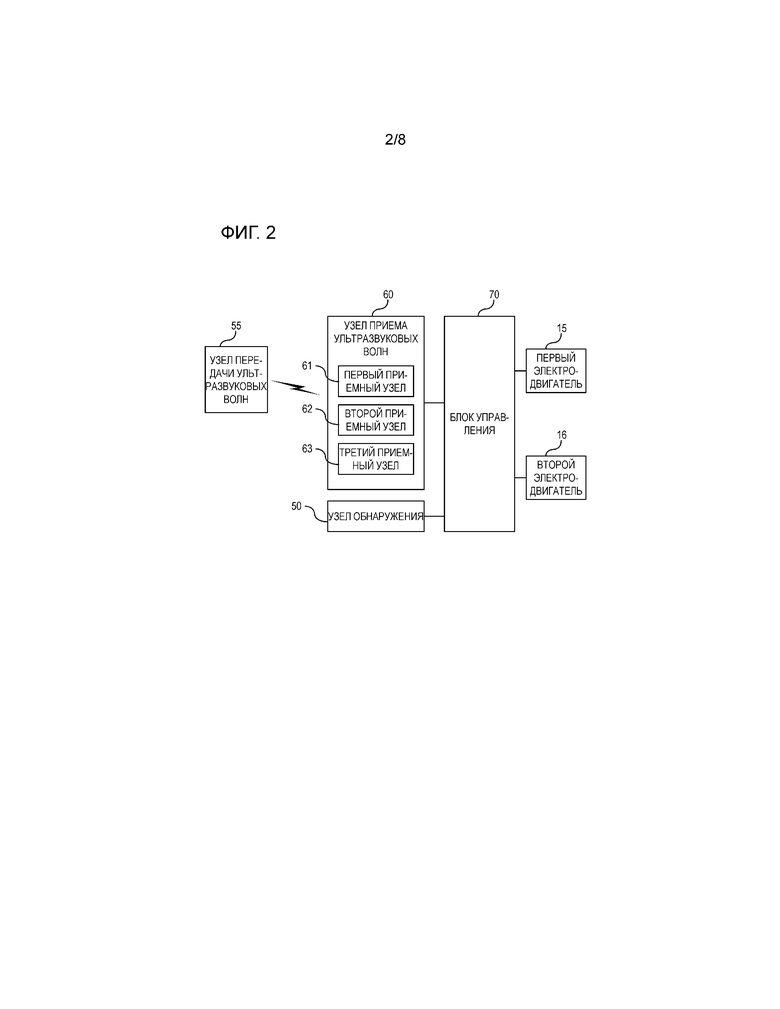
[15] фиг.2 - блок схема пылесоса в соответствии с одним вариантом осуществления настоящего изобретения;
[16] фиг.3 - схема последовательности действий, иллюстрирующая способ управления пылесосом в соответствии с одним вариантом осуществления настоящего изобретения;
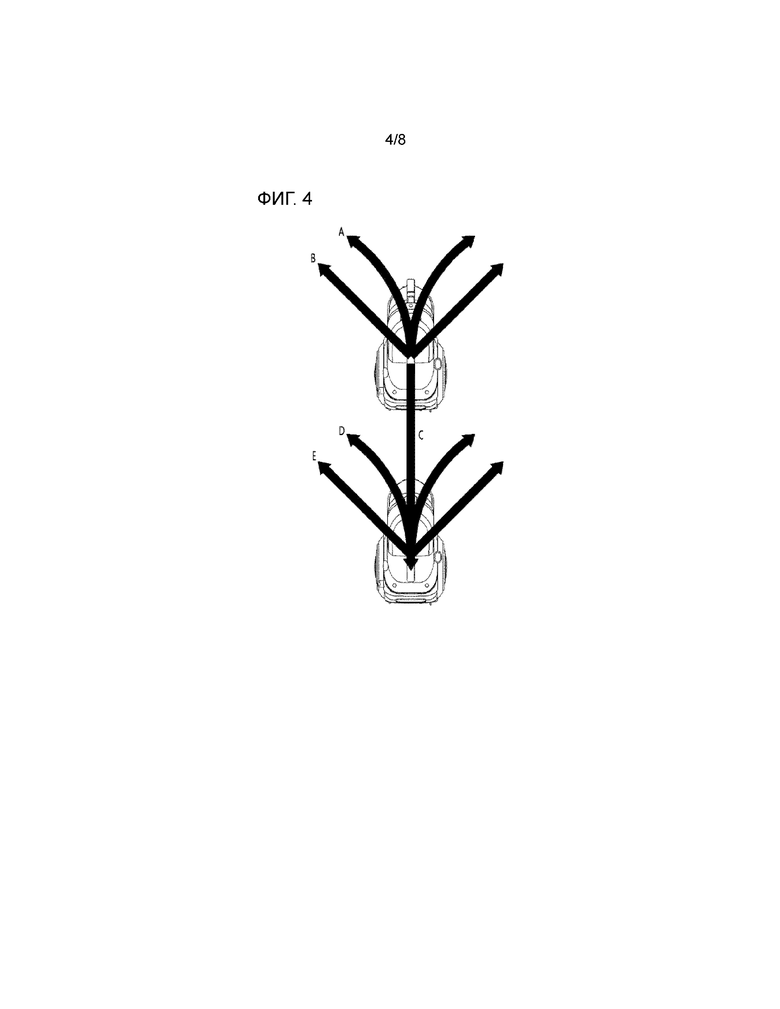
[17] фиг.4 - вид, иллюстрирующий множество маршрутов отправления корпуса пылесоса;
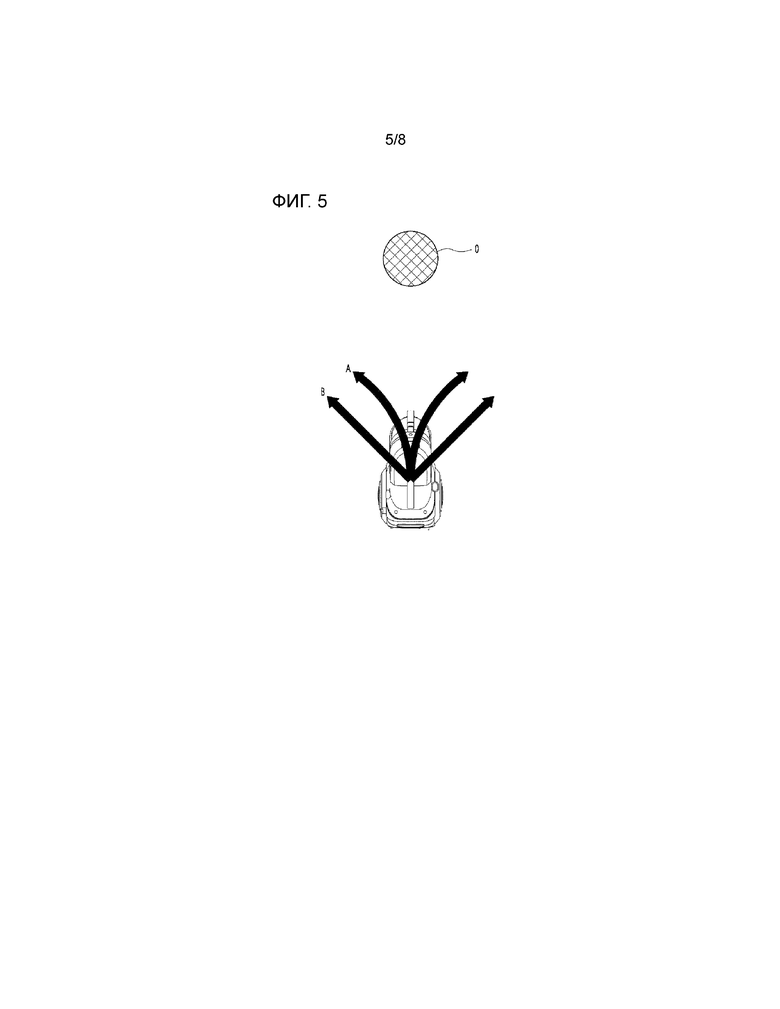
[18] фиг.5 - вид, иллюстрирующий маршрут отправления корпуса пылесоса, когда расстояние между корпусом пылесоса и препятствием больше опорного расстояния;
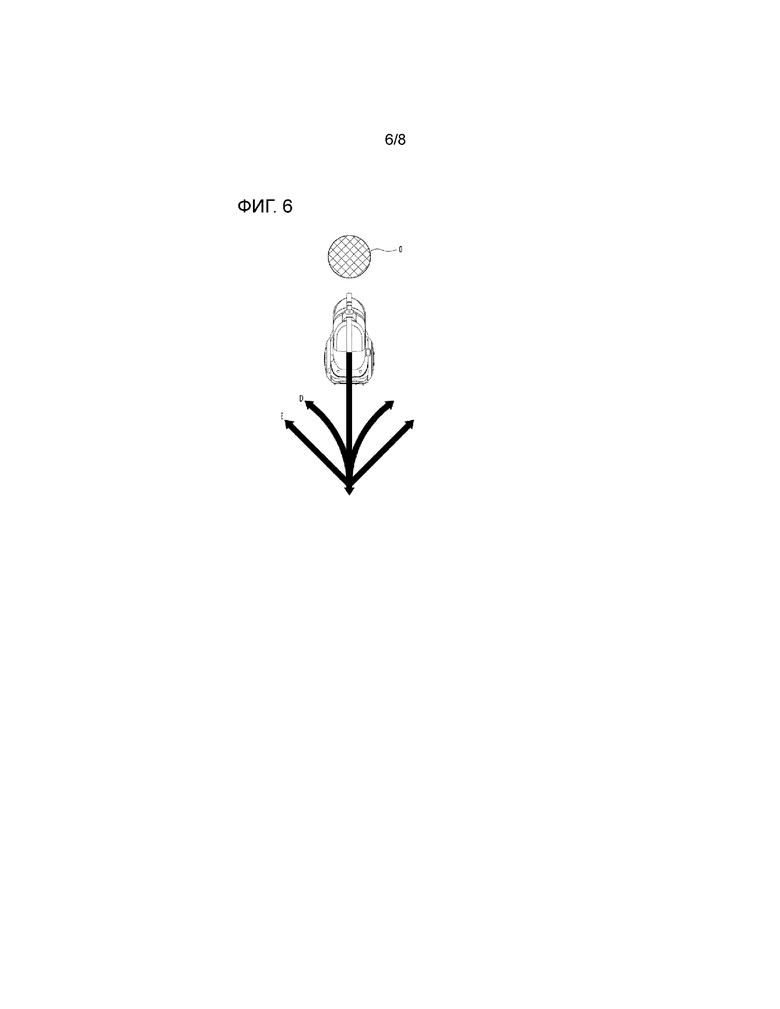
[19] фиг.6 - вид, иллюстрирующий маршрут отправления корпуса пылесоса, когда расстояние между корпусом пылесоса и препятствием является опорным расстоянием или меньше;
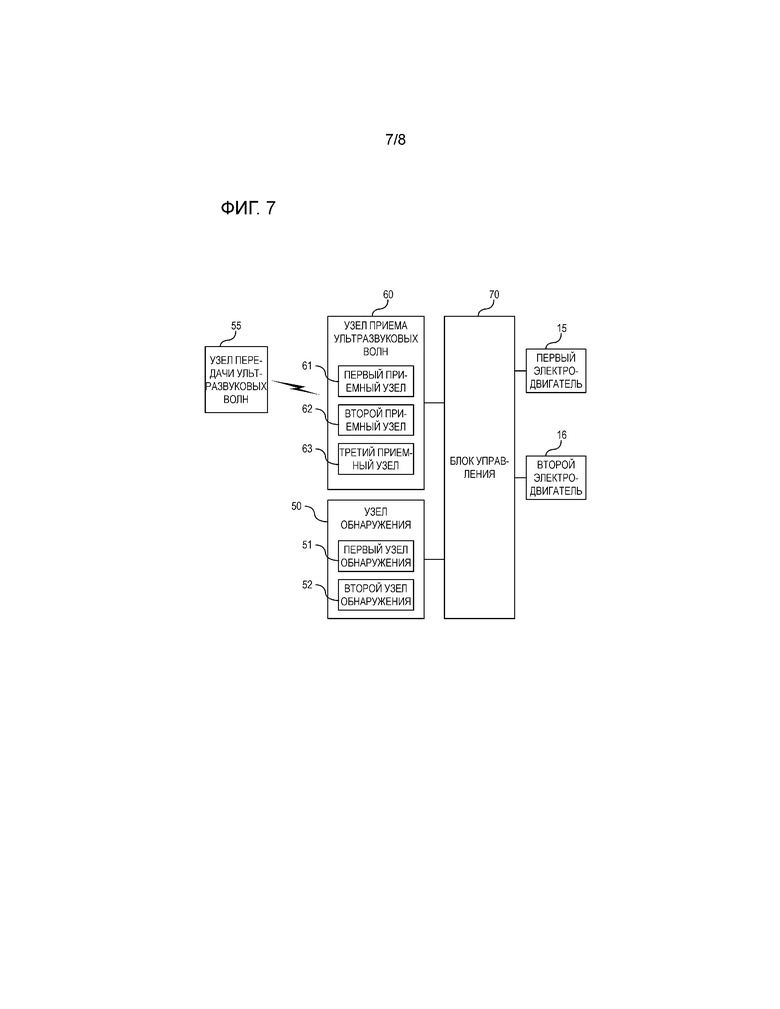
[20] фиг.7 - блок схема пылесоса в соответствии с другим вариантом осуществления настоящего изобретения;
[21] фиг.8 - схема последовательности действий, иллюстрирующая способ управления пылесосом в соответствии с другим вариантом осуществления настоящего изобретения.
Вариант осуществления настоящего изобретения
[22] Будет подробно сделана ссылка на варианты осуществления настоящего раскрытия, примеры которых проиллюстрированы на сопроводительных чертежах.
[23] В нижеследующем подробном описании предпочтительных вариантов осуществления ссылка сделана на сопроводительные чертежи, которые составляют его часть, и на которых показано с помощью иллюстрации конкретных вариантов осуществления, с помощью которых изобретение может быть осуществлено на практике. Эти варианты осуществления описаны достаточно подробно для обеспечения осуществления на практике изобретения специалистами в данной области техники, и понятно, что другие варианты осуществления могут быть использованы, и что логические структурные, механические, электрические и химические изменения возможны без отхода от сущности или объема изобретения. Во избежание подробности, не нужной для обеспечения осуществления на практике изобретения специалистами в данной области техники, в описании может быть опущена определенная информация, известная специалистам в данной области техники. Следовательно, нижеследующее подробное описание не должно истолковываться в ограничивающем смысле.
[24] Кроме того, описание вариантов осуществления термины, такие как первый, второй, A, B, (a), (b) или тому подобное могут использоваться при описании элементов настоящего изобретения. Каждый из этих терминов не используется для определения сущности, порядка или последовательности соответствующего элемента, и используется только для отличия соответствующего элемента от другого элемента (элементов). Следует отметить, что если описано в описании, что один элемент «соединен», «связан» или «объединен» с другим элементом, первый может быть непосредственно «соединен», «связан» или «объединен» с последним или «соединен», «связан» или «объединен» с последним через другой элемент.
[25] Фиг.1 - перспективный вид пылесоса в соответствии с одним вариантом осуществления настоящего изобретения, и фиг.2 - блок схема пылесоса в соответствии с одним вариантом осуществления настоящего изобретения.
[26] Как показано на фиг.1 и 2, пылесос 1 в соответствии с одним вариантом осуществления настоящего изобретения может включать в себя корпус 10, который имеет всасывающий электродвигатель 14 для генерации всасывающей силы, и всасывающий узел 20, который соединен с корпусом 10 пылесоса и всасывает воздух и инородные вещества с поверхности пола.
[27] Корпус 10 пылесоса может включать в себя подвижный узел для перемещения корпуса 10 пылесоса. Подвижный узел может включать в себя множество колес 11 и 12. Множество колес 11 и 12 могут быть расположены на обеих сторонах корпуса 10 пылесоса. Множество колес 11 и 12 могут включать в себя первое колесо 11, которое расположено на правой стороне корпуса 10 пылесоса, и второе колесо 12, которое расположено на его левой стороне. Кроме того, подвижный узел может включать в себя одно или более вспомогательных колес, но не ограничивается этим.
[28] Следовательно, корпус 10 пылесоса может поддерживаться в трех точках (или более) на поверхности пола с помощью первого и второго колес и одного или более вспомогательных колес и может поддерживаться в двух точках с помощью первого и второго колес.
[29] Пылесборный контейнер 40, в котором содержится пыль, отделенная от воздуха, может быть соединен с возможностью съема с корпусом 10 пылесоса.
[30] Всасывающий узел 20 может включать в себя всасывающую насадку 30, которая перемещается по поверхности пола, и соединительный узел, который соединяет всасывающую насадку 30 с корпусом 10 пылесоса. Соединительный узел может включать в себя раздвижную трубку 24, которая соединена с всасывающей насадкой 30, ручку 22, которая соединена с раздвижной трубкой 24, и соединительный рукав 23, который соединяет ручку 22 с корпусом 10 пылесоса.
[31] Подвижный узел может дополнительно включать в себя множество электродвигателей 15 и 16, которые вращают множество колес 11 и 12, соответственно. Множество электродвигателей 15 и 16 может включать в себя первый электродвигатель 15 и второй электродвигатель 16. Первый электродвигатель 15 может вращать первое колесо 11, и второй электродвигатель 16 может вращать второе колесо 11. Каждый из электродвигателей 15 и 16 может независимо приводиться в действие. За счет независимой работы каждого из электродвигателей 15 и 16 корпус 10 пылесоса может автоматически перемещаться вперед и назад и может также поворачиваться влево и вправо.
[32] Пылесос 1 может дополнительно включать в себя узел 50 обнаружения. Узел 50 обнаружения может определять наличие и отсутствие препятствия. Например, узел 50 обнаружения может определять расстояние от препятствия. Кроме того, узел 50 обнаружения может определять расстояние от поверхности пола.
[33] Узел 50 обнаружения может включать в себя узел передачи световых волн и один или более узлов приема световых волн. Узел передачи световых волн передает световую волну, и один или более узлов приема световых волн принимают световую волну, которая передана узлом передачи световых волн и отражена препятствием или поверхностью пола.
[34] Узел передачи световых волн и один или более узлов приема световых волн расположены на нижней стороне корпуса 10 пылесоса и могут быть расположены на наружной стороне корпуса 10 пылесоса.
[35] Например, когда расположено множество узлов приема световых волн, один узел приема световых волн может быть расположен на передней поверхности корпуса 10 пылесоса, и другой узел приема световых волн может быть расположен на нижней поверхности корпуса 10 пылесоса. В этом случае узлы приема световых волн могут быть расположены на нижнем конце передней поверхности корпуса 10 пылесоса, переднем конце его нижней поверхности или в его углу, который является соединительным участком между передней поверхностью и нижней поверхностью корпуса 10 пылесоса. В качестве альтернативы, узлы приема световых волн могут быть расположены на передней поверхности корпуса 10 пылесоса на расстоянии вверх и вниз друг от друга, и каждый из множества узлов 50 обнаружения может быть выполнен с возможностью одновременного определения наличия препятствия и расстояния от поверхности пола.
[36] Световая волна может быть инфракрасным светом или ультразвуковой волной, и узел 50 обнаружения не ограничивается данным вариантом осуществления, и любые типы датчиков могут быть использованы в качестве узел 50 обнаружения.
[37] Пылесос 1 может дополнительно включать в себя узел 55 передачи ультразвуковых волн, который передает ультразвуковую волну, и узел 60 приема ультразвуковых волн, который принимает ультразвуковую волну, переданную узлом 55 передачи ультразвуковых волн. Узел 55 передачи ультразвуковых волн может быть расположен на всасывающем узле 20. Узел 55 передачи ультразвуковых волн может быть расположен на ручке 22 или всасывающей насадке 30, но не ограничивается этим.
[38] Расстояние между всасывающим узлом 20 и корпусом 10 пылесоса может измеряться, используя расстояние между узлом 55 передачи ультразвуковых волн и узлом 60 приема ультразвуковых волн. То есть, в описании расстояние между узлом 55 передачи ультразвуковых волн и узлом 55 приема ультразвуковых волн рассматривается в качестве расстояния между всасывающим узлом 20 и корпусом 10 пылесоса.
[39] Узел 60 приема ультразвуковых волн может быть расположен на корпусе 10 пылесоса. Узел 60 приема ультразвуковых волн может включать в себя множество приемных частей 61, 62 и 63. Каждый из множества приемных узлов 61, 62 и 63 может принимать ультразвуковую волну, переданную узлом 55 передачи ультразвуковых волн.
[40] Когда множество приемных узлов 61, 62 и 63 выступают горизонтально или вертикально, линии, которые соединяют множество приемных узлов 61, 62 и 63, могут образовывать многоугольник.
[41] Например, множество приемных узлов 61, 62 и 63 может включать в себя первый приемный узел 61, второй приемный узел 62 и третий приемный узел 63. Когда первый-третий приемные узлы 61, 62 и 63 выступают горизонтально или вертикально, линии, которые соединяют первый-третий приемные узлы 61, 62 и 63, могут образовывать треугольник.
[42] Узел из первого-третьего приемных узлов 61, 62 и 63 может быть расположен на высоте, отличной от высоты его другого узла. Кроме того, два из первого-третьего приемных узлов 61, 62 и 63 могут быть расположены горизонтально на расстоянии друг от друга.
[43] В варианте осуществления узел 55 передачи ультразвуковых волн и узел 60 приема ультразвуковых волн могут в целом называться первым устройством обнаружения, и узел 50 обнаружения может называться вторым устройством обнаружения.
[44] Пылесос 1 может дополнительно включать в себя блок 70 управления, который управляет первым электродвигателем 15 и вторым электродвигателем 16. Блок 70 управления определяет местоположение узла 55 передачи ультразвуковых волн на основании ультразвуковой волны, принятой узлом 60 приема ультразвуковых волн, и может приводить в действие один или более из первого электродвигателя 15 и второго электродвигателя 16, когда необходимо, чтобы корпус 10 пылесоса переместился к узлу 55 передачи ультразвуковых волн, местоположение которого определено.
[45] В случае, в котором узел 55 передачи ультразвуковых волн расположен на ручке 22, при выполнении процесса очистки при перемещении ручки 22 узел 55 передачи ультразвуковых волн перемещается вместе с ручкой 22. В этом случае расстояние между узлом 55 передачи ультразвуковых волн и узлом 60 приема ультразвуковых волн может изменяться.
[46] Расстояние перемещения ручки 22 соответствует длине соединительного рукава 23, и когда ручка 22 расположена на заданном расстоянии от корпуса 10 пылесоса, усилие перемещения ручки 22 приложено к корпусу 10 пылесоса, и, таким образом, корпус 10 пылесоса перемещается вперед.
[47] При этом, когда каждый из электродвигателей 15 и 16 не работает, усилие для перемещения корпуса 10 пылесоса должно прикладываться пользователем. В этом случае существует проблема в том, что это является трудным для пользователя. Следовательно, в варианте осуществления, когда расстояние между узлом 55 передачи ультразвуковых волн и корпусом 10 пылесоса является заданным расстоянием или более, блок 70 управления может управлять первым электродвигателем 15 и вторым электродвигателем 16 таким образом, что корпус 10 пылесоса перемещается к ручке 22.
[48] Блок 70 управления может определять местоположение препятствия на основании световой волны, принятой узлом 50 обнаружения, и может управлять первым электродвигателем 15 и вторым электродвигателем 16 таким образом, что корпус 10 пылесоса перемещается при обходе препятствия.
[49] Более конкретно, блок 70 управления может выдавать множество маршрутов отправления на основании наличия или отсутствия препятствия и его местоположения. Блок 70 управления может выбирать один из множества маршрутов отправления в качестве маршрута, по которому корпус 10 пылесоса фактически перемещается. Выбранный маршрут отправления может быть частью маршрута движения из данного местоположения корпуса 10 пылесоса в его заданное местоположение.
[50] Часть или все множество маршрутов отправления могут быть маршрутами с обходом для обхода препятствия. В качестве альтернативы, часть или все множество маршрутов отправления могут быть маршрутами отправления, когда нет препятствия.
[51] Маршруты с обходом могут включать в себя маршрут, на котором корпус 10 пылесоса обходит препятствие посредством перемещения вперед и обхода препятствия или изменения своего направления, и маршрут, по которому корпус 10 пылесоса перемещается назад и затем перемещается вперед для обхода препятствия, или изменяет свое направление в одну сторону.
[52] Ниже будет подробно описан способ управления пылесосом. Фиг.3 - схема последовательности действий, иллюстрирующая способ управления пылесосом в соответствии с одним вариантом осуществления настоящего изобретения, фиг.4 - вид, иллюстрирующий множество маршрутов отправления корпуса пылесоса в соответствии с одним вариантом осуществления настоящего изобретения, фиг.5 - вид, иллюстрирующий маршрут отправления корпуса пылесоса, когда расстояние между корпусом пылесоса и препятствием больше опорного расстояния, и фиг.6 - вид, иллюстрирующий маршрут отправления корпуса пылесоса, когда расстояние между корпусом пылесоса и препятствием является опорным расстоянием или меньше.
[53] Как показано на фиг.3-6, в то время как выполняется процесс очистки с использованием пылесоса 1, устройство 50 обнаружения может определять наличие или отсутствие препятствия или местоположение препятствия, когда имеется препятствие (S1).
[54] Более конкретно, световая волна передается узлом передачи световых волн, и узел приема световых волн принимает световую волну, переданную узлом передачи световых волн.
[55] Блок 70 управления может определять расстояние от препятствия и относительных местоположений препятствия и корпуса 10 пылесоса, используя световую волну. Например, блок 70 управления может определять расстояние от препятствия посредством расчета времени, в то время как световая волна, переданная узлом передачи световых волн, отражается препятствием и затем принимается узлом приема световых волн, и может также определять угол между препятствием и корпусом 10 пылесоса с учетом расстояния между каждым из множества узлов 50 обнаружения и препятствием. Однако, в настоящем изобретении способ определения расстояния от препятствия и относительных расположений препятствия и корпуса 10 пылесоса не ограничивается этим.
[56] Блок 70 управления может определять область перемещения корпуса 10 пылесоса на основании местоположения препятствия и может выдавать множество маршрутов отправления (S2).
[57] Как описано выше, часть или все множество маршрутов отправления могут быть маршрутами с обходом. Ниже, будет дано описание на предположении того, что все множество маршрутов отправления является маршрутами с обходом. Блок 70 управления выдает множество маршрутов отправления, на которых пылесос 1 может обходить препятствие.
[58] Как показано на фиг.4, блок 70 управления может выдавать маршруты отправления, включающие в себя, например, маршрут A, по которому пылесос 1 перемещается вперед и поворачивается в одну сторону (левую сторону или правую сторону), маршрут B, на котором пылесос 1 изменяет направление к одной стороне (левой стороне или правой стороне) и затем перемещается вперед, маршрут C, на котором пылесос 1 перемещается прямо назад, маршрут D, на котором пылесос 1 перемещается обратно и затем поворачивается к одной стороне (левой стороне или правой стороне) при перемещении вперед, маршрут E, на котором пылесос 1 перемещается назад и затем изменяет направление в левую сторону или правую сторону и перемещается вперед и т.д.
[59] Более конкретно, как показано на фиг.5, когда расстояние между корпусом 10 пылесоса и препятствием O больше опорного расстояния, блок 70 управления может выдавать маршрут A, по которому пылесос 1 перемещается вперед и поворачивается в одну сторону, и маршрут B, на котором пылесос 1 изменяет направление в одну сторону и затем перемещается вперед.
[60] Как показано на фиг.6, когда расстояние между корпусом 10 пылесоса и препятствием O является опорным расстоянием или меньше, блок 70 управления может выдавать маршрут С, по которому пылесос 1 перемещается прямо назад, маршрут D, по которому пылесос 1 перемещается назад и затем поворачивается в одну сторону при перемещении вперед, и маршрут E, по которому пылесос 1 перемещается назад, затем изменяет направление и перемещается вперед.
[61] Ультразвуковая волна может передаваться от узла 55 передачи ультразвуковых волн. Затем узел 60 приема ультразвуковых волн принимает ультразвуковую волну, переданную узлом 55 передачи ультразвуковых волн (S3).
[62] Блок 70 управления определяет значение расстояния между узлом 55 передачи ультразвуковых волн и каждым из приемных узлов 61, 62 и 63 на основании ультразвуковой волны, принятой каждым из приемных узлов 61, 62 и 63 (S4).
[63] Блок 70 управления определяет местоположение узла 55 передачи ультразвуковых волн, используя множество определенных значений расстояния (S5).
[64] Блок 70 управления определяет то, что необходимо ли перемещение корпуса 10 пылесоса на основании определенного местоположения узла 55 передачи ультразвуковых волн (S6).
[65] В варианте осуществления случай, в котором необходимо перемещение корпуса 10 пылесоса, может быть случаем, в котором расстояние между узлом 55 передачи ультразвуковых волн и корпусом 10 пылесоса является опорным расстоянием или больше. При этом, блок 70 управления управляет корпусом 10 пылесоса для перемещения в направлении, которое становится ближе к узлу 55 передачи ультразвуковых волн. Соответственно, корпус 10 пылесоса может перемещаться вперед к узлу 55 передачи ультразвуковых волн. Здесь, первое опорное расстояние может изменяться в соответствии с длиной соединительного рукава.
[66] Кроме того, даже когда расстояние между узлом 55 передачи ультразвуковых волн и корпусом 10 пылесоса является вторым опорным расстоянием или меньше, может быть необходимым перемещение корпуса 10 пылесоса. При этом, блок 70 управления управляет корпусом 10 пылесоса для перемещения в направлении, которое становится удаленным от узла 55 передачи ультразвуковых волн. Соответственно, корпус 10 пылесоса может перемещаться назад в направлении, противоположном узлу 55 передачи ультразвуковых волн. Здесь, второе опорное расстояние может изменяться в соответствии с шагом пользователя, ростом или тому подобным. Здесь, первое опорное расстояние может быть определено большим, чем второе опорное расстояние.
[67] Когда расстояние между узлом 55 передачи ультразвуковых волн и корпусом 10 пылесоса является первым опорным расстоянием или больше, корпус 10 пылесоса удален от пользователя, и, таким образом, для удобства пользователя требуется перемещение вперед корпуса 10 пылесоса. Однако, когда расстояние между узлом 55 передачи ультразвуковых волн и корпусом 10 пылесоса является вторым опорным расстоянием или меньше, необходимо перемещение назад корпуса 10 пылесоса для предотвращения столкновения с пользователем.
[68] В конечном счете, когда расстояние между узлом 55 передачи ультразвуковых волн и корпусом 10 пылесоса является первым опорным расстоянием или больше, или вторым опорным расстоянием или меньше, необходимо перемещение корпуса 10 пылесоса.
[69] В результате определения на этапе S6, когда перемещение корпуса 10 пылесоса необходимо, блок 70 управления выдает множество маршрутов перемещения, которые проходят от маршрута отправления до заданного местоположения, и выбирает один из множества маршрутов движения (S7).
[70] Например, блок 70 управления выдает множество маршрутов перемещения, которые проходят от маршрута отправления до заданного местоположения. Блок 70 управления может определять заданное местоположение на основании расстояния между корпусом 10 пылесоса и всасывающим узлом 20. Конкретно, заданное местоположение определяется на основании расстояния между узлом 55 передачи ультразвуковых волн и узлом 60 ультразвуковых волн, и может быть множество точек в пределах области, в которой их расстояние является первым опорным расстоянием или меньше и вторым опорным расстоянием или больше. Блок 70 управления может определять заданное местоположение посредством выбора одной из множества точек.
[71] Поскольку блок 70 управления может выдавать множество маршрутов перемещения посредством включения одного маршрута отправления, количество выданных маршрутов перемещения может быть таким же, что и количество маршрутов отправления или больше количества маршрутов отправления.
[72] Оптимальный маршрут перемещения из множества выданных маршрутов перемещения может быть выбран. Например, оптимальный маршрут перемещения может быть маршрутом из множества выданных маршрутов перемещения, который имеет самое короткое расстояние. То есть, может быть выбран маршрут из множества выданных маршрутов перемещения, в котором расстояние перемещения корпуса 10 пылесоса является самым коротким. Самый короткий маршрут может быть осуществлен с помощью алгоритма и может быть осуществлен с помощью одного из алгоритма Дейкстры, алгоритм Беллмана-Форда, алгоритма A* и алгоритма Флойда-Уоршелла, но не ограничивается этим.
[73] Блок 70 управления приводит в действие один или более из первого электродвигателя 15 и второго электродвигателя 16, так что пылесос 1 перемещается по выбранному маршруту перемещения (S8).
[74] Например, корпус 10 пылесоса может перемещаться вперед или назад на заданное расстояние от данного положения. То есть, блок 70 управления может управлять каждым из электродвигателей 15 и 16 для вращения. При этом, расстояние перемещения каждого из колес может быть одинаковым посредством согласования числа оборотов, и корпус 10 пылесоса перемещается вперед или назад.
[75] В качестве другого примера корпус 10 пылесоса может управляться для поворота в одну сторону. Для поворота корпуса 10 пылесоса в левую сторону блок 70 управления может управлять первым электродвигателем 15 и вторым электродвигателем 16 таким образом, что число оборотов в минуту второго электродвигателя 16 больше числа оборотов в минуту первого электродвигателя 15. Однако, для поворота в правую сторону блок 70 управления может управлять первым электродвигателем 15 и вторым электродвигателем 16 таким образом, что число оборотов в минуту первого электродвигателя 15 больше числа оборотов в минуту второго электродвигателя 16. При этом, радиус поворота может регулироваться посредством изменения разности между числом оборотов в минуту первого электродвигателя 15 и числом оборотов в минуту второго электродвигателя 16.
[76] В качестве еще одного варианта осуществления корпус 10 пылесоса может управляться таким образом, что его направление изменяется. Для изменения направления корпуса 10 пылесоса в одну сторону блок 70 управления может управлять первым электродвигателем 15 и вторым электродвигателем 16. При этом, угол для изменения направления может регулироваться в соответствии с числом оборотов в минуту каждого из электродвигателей 15 и 16.
[77] В результате определения на этапе S6, когда перемещение корпуса 10 пылесоса не требуется, то есть, расстояние между узлом 55 передачи ультразвуковых волн и корпусом 10 пылесоса является первым опорным расстоянием или меньше и вторым опорным расстоянием или больше, сигнал ультразвуковой волны принимается снова (S3), и определяется значение расстояния до узла 55 передачи ультразвуковых волн (S4), и определяется местоположение узла 55 передачи ультразвуковых волн (S5), и затем определяется то, что требуется ли перемещение пылесоса 1 (S6).
[78] При этом, блок 70 управления может определять то, что находятся ли колеса корпуса 10 пылесоса в контакте с поверхностью пола на основании расстояния от поверхности пола.
[79] Когда определено, что колеса корпуса 10 пылесоса не находятся в контакте с поверхностью пола, может быть определено то, что перемещение корпуса 10 пылесоса не требуется. То есть, когда блок 70 управления определяет, что расстояние от поверхности пола, которое определено узлом 50 обнаружения, является заданным расстоянием или больше, определяется как случай, в котором перемещение корпуса 10 пылесоса не требуется для предотвращения получения повреждения пользователем, и, таким образом, подвижный узел может управляться для остановки.
[80] Поскольку поверхность пола служит в качестве отражающей поверхности световой волны, когда корпус 10 пылесоса удаляется от поверхности пола (например, корпус 10 пылесоса поднят пользователем), величина световой волны, принятой одним или более узлами 60 приема световых волн, значительно уменьшена, и, таким образом, блок 70 управления может определять, что колеса не находятся в контакте с поверхностью пола.
[81] В соответствии с предложенным вариантом осуществления в случае, в котором требуется перемещение корпуса 10 пылесоса в направлении, в котором перемещается пользователь, когда препятствие имеется на маршруте, по которому пользователь перемещается в конечный пункт маршрута, можно обойти препятствие, и корпус 10 пылесоса может быстро и точно перемещаться в направлении, в котором перемещается пользователь.
[82] Кроме того, поскольку подъем корпуса 10 пылесоса определен, и вращение колес регулируется, пользователь может быть предотвращен от получения повреждения вследствие вращения колес.
[83] Кроме того, поскольку вращение колес предотвращено при определении подъема корпуса 10 пылесоса, одежда пользователя может быть предотвращена от защемления в зазоре между колесом и корпусом 10 пылесоса вследствие вращения колес.
[84] Фиг.7 - блок схема пылесоса в соответствии с другим вариантом осуществления настоящего изобретения.
[85] Как показано на фиг.7, узел 50 обнаружения в соответствии с другим вариантом осуществления настоящего изобретения может включать в себя множество узлов 50 обнаружения. То есть, узел 50 обнаружения может включать в себя первый узел 51 обнаружения и второй узел 52 обнаружения.
[86] Например, первый узел 51 обнаружения может обнаруживать препятствие, и второй узел 52 обнаружения может определять положение корпуса 10 пылесоса.
[87] Функция обнаружения первого узла 51 обнаружения, которое определяет расстояние от препятствия и его местоположения, является такой же, что функция обнаружения устройства обнаружения в предыдущем варианте осуществления. Второй узел 52 обнаружения может использоваться для определения того, что расположены ли колеса корпуса 10 пылесоса на расстоянии от поверхности пола.
[88] Когда корпус 10 пылесоса не находится в контакте с поверхностью пола, пользователь может быть предотвращен от получения повреждения за счет управления электродвигателем.
[89] Подобно первому узлу 51 обнаружения второй узел 52 обнаружения может быть оптическим датчиком, который определяет расстояние от поверхности пола. Следовательно, когда корпус 10 пылесоса удален от поверхности пола на заданное расстояние или больше, может быть определено, что пылесос не находится в контакте с поверхностью пола, и, таким образом, электродвигатель может быть остановлен.
[90] В качестве альтернативы, второй узел 52 обнаружения может быть датчиком ускорения или гиродатчиком. Более конкретно, когда корпуса 10 пылесоса поднят вверх от поверхности пола пользователем, и ускорение или угловое ускорение, имеющее заданное значение или больше, моментально генерируется в направлении вверх, блок 70 управления может определять, что корпус 10 пылесоса не находится в контакте с поверхностью пола и может останавливать электродвигатель.
[91] Вариант осуществления может применяться в случаях, когда корпус 10 пылесоса находится в контакте в трех точках с поверхностью пола за счет первого и второго колес и дополнительного колеса и находится в контакте в двух точках с поверхностью пола только за счет первого и второго колес без вспомогательного колеса.
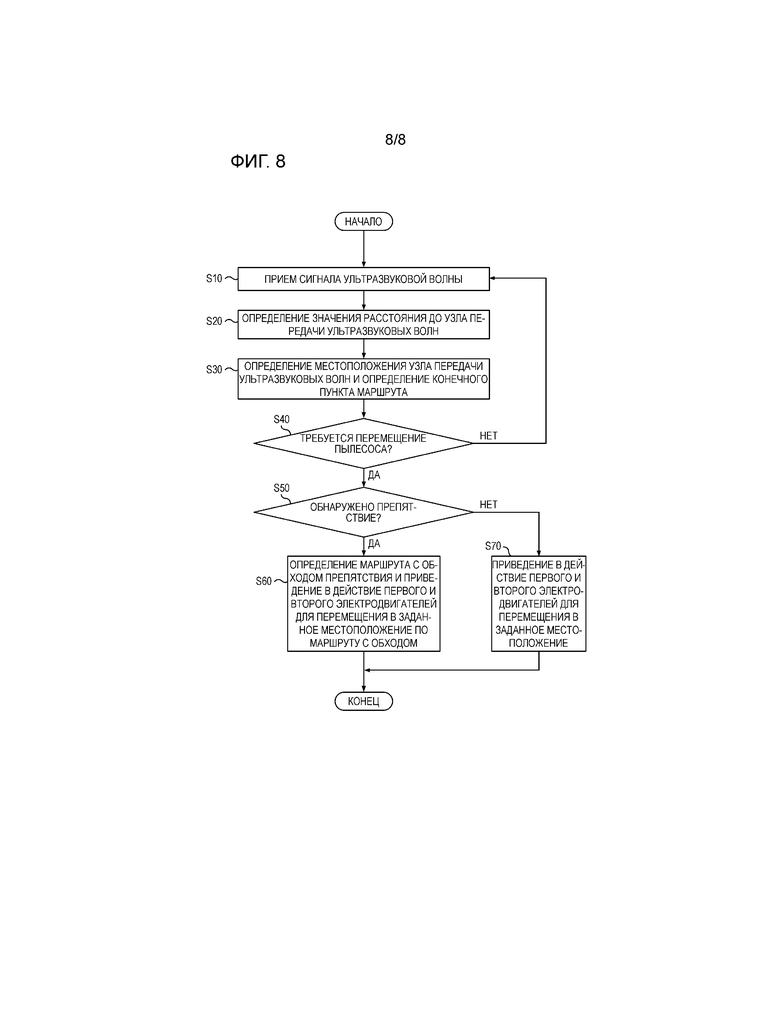
[92] Фиг.8 - схема последовательности действий, иллюстрирующая способ управления пылесосом в соответствии с другим вариантом осуществления настоящего изобретения. Как показано на фиг.8, в то время как осуществляется процесс очистки с использованием пылесоса 1, ультразвуковая волна может передаваться узлом 55 передачи ультразвуковых волн. Затем, узел 60 приема ультразвуковых волн принимает ультразвуковую волну, переданную узлом 55 передачи ультразвуковых волн (S10).
[93] Блок 70 управления определяет значение расстояния между узлом 55 передачи ультразвуковых волн и каждый из приемных узлов 61, 62 и 63 на основании ультразвуковой волны, принятой каждым из приемных узлов 61, 62 и 63 (S20).
[94] Блок 70 управления определяет местоположение узла 55 передачи ультразвуковых волн, используя множество определенных значений расстояния (S30).
[95] Блок 70 управления определяет то, что необходимо ли перемещение корпуса 10 пылесоса на основании определенного местоположения узла 55 передачи ультразвуковых волн (S40).
[96] Блок 70 управления определяет то, что обнаружено ли препятствие узлом 50 обнаружения (S50).
[97] На этапе S50, когда препятствие обнаружено, блок 70 управления определяет маршрут с обходом, который проходит от корпуса 10 пылесоса к заданному местоположению на основании местоположения препятствия и затем приводит в действие один из или более из первого электродвигателя 15 и второго электродвигателя 16 таким образом, что корпус 10 пылесоса перемещается по маршруту с обходом в заданное местоположение (S60).
[98] На этапе S50, когда препятствие не обнаружено, блок 70 управления выдает маршрут перемещения, который проходит до заданного местоположения и затем приводит в действие первый электродвигатель 15 и второй электродвигатель 16 (S70).
[99] В соответствии с предложенным изобретением, поскольку корпус 10 пылесоса может перемещаться вместе с перемещением пользователя, пользователю не нужно непосредственно перемещать корпус 10 пылесоса, и, таким образом, удобство пользователя может быть повышено.
[100] Кроме того, поскольку определено, что имеется препятствие на маршруте, по которому перемещается пользователь в конечный пункт маршрута, и возможен обход препятствия, корпус 10 пылесоса может точно перемещаться в направлении, в котором перемещается пользователь.
[101] В описании узел передачи ультразвуковых волн и узел приема ультразвуковых волн являются элементами для определения перемещения всасывающего узла и могут называться устройством обнаружения.
[102] Хотя варианты осуществления были описаны со ссылкой на ряд его иллюстративных вариантов осуществления, следует понимать, что множество других модификаций и вариантов осуществления может быть задумано специалистами в данной области техники, которые будут соответствовать сущности и объему принципов настоящего раскрытия. Более конкретно, различные изменения и модификации возможны в комплектующих частях и/или расположениях в рассматриваемом комбинированном устройстве в пределах объема раскрытия, чертежей и прилагаемой формулы изобретения. В дополнение к изменениям и модификациям в комплектующих частях и/или расположениям альтернативные использования будут также очевидны для специалистов в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ДАННЫМ ПЫЛЕСОСОМ | 2016 |
|
RU2707821C2 |
| ПЫЛЕСОС | 2016 |
|
RU2678389C1 |
| РОБОТ-ПЫЛЕСОС, СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2003 |
|
RU2242160C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| РОБОТ-ЧИСТИТЕЛЬ, ОСНАЩЕННЫЙ ГЕНЕРАТОРОМ ОТРИЦАТЕЛЬНЫХ ИОНОВ | 2004 |
|
RU2279244C2 |
| ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ПЫЛЕСОСОМ | 2011 |
|
RU2478335C1 |
| ПОДВИЖНЫЙ РОБОТ, В КОТОРОМ ИСПОЛЬЗУЮТ ДАТЧИК ИЗОБРАЖЕНИЯ, И СПОСОБ ИЗМЕРЕНИЯ ПРОЙДЕННОГО ИМ РАССТОЯНИЯ | 2003 |
|
RU2254227C1 |
| РОБОТ-ПЫЛЕСОС | 2016 |
|
RU2687761C1 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |

Пылесос в соответствии с вариантом осуществления настоящего изобретения включает в себя корпус, имеющий подвижный узел, всасывающий узел, выполненный с возможностью всасывания пыли и воздуха, устройство обнаружения, выполненное с возможностью обнаружения перемещения всасывающего узла, и блок управления, выполненный с возможностью определения того, что требуется ли перемещение корпуса пылесоса на основании информации, полученной всасывающим узлом, и управления подвижным узлом, когда требуется перемещение корпуса пылесоса, причем блок управления определяет заданное местоположение, в которое корпус пылесоса будет перемещаться, определяет маршрут перемещения в заданное местоположение на основании обнаруженного препятствия, управляет подвижным узлом таким образом, что корпус пылесоса перемещается по определенному маршруту перемещения, останавливает электродвигатель, когда определено, что корпус пылесоса не находится в контакте с поверхностью пола и, таким образом, предотвращает повреждение пользователя. 2 н. и 9 з.п. ф-лы, 8 ил.
1. Пылесос, содержащий
корпус, имеющий подвижный узел для перемещения;
всасывающий узел, соединенный с корпусом пылесоса, выполненный с возможностью всасывания пыли и воздуха и направления всасываемой пыли и воздуха в корпус пылесоса и имеющий ручку;
первое устройство обнаружения, выполненное с возможностью определения расстояния между корпусом пылесоса и всасывающим узлом, второе устройство обнаружения, расположенное на корпусе пылесоса для обнаружения препятствия; и
блок управления, выполненный с возможностью управления подвижным узлом,
причем блок управления
выдает множество маршрутов отправления на основании местоположения препятствия, обнаруженного вторым устройством обнаружения, и расстояния между препятствием и корпусом пылесоса,
определяет, требуется ли перемещение корпуса пылесоса на основании расстояния между всасывающим узлом и корпусом пылесоса, определенного первым устройством обнаружения,
определяет заданное местоположение, в которое корпус пылесоса будет перемещаться после определения множества маршрутов отправления, и
определяет маршрут перемещения корпуса пылесоса из одного из множества маршрутов отправления в заданное местоположение, когда требуется перемещение корпуса пылесоса.
2. Пылесос по п.1, в котором маршрут отправления является маршрутом обхода, по которому корпус пылесоса обходит препятствие.
3. Пылесос по п.2, в котором блок управления управляет корпусом пылесоса для поворота в левую или правую сторону и, таким образом, для обхода препятствия.
4. Пылесос по п.2, в котором блок управления управляет корпусом пылесоса для перемещения назад на заданное расстояние, затем поворота в левую или правую сторону и, таким образом, для обхода препятствия.
5. Пылесос по п.1, в котором первое устройство обнаружения содержит узел передачи ультразвуковых волн, который расположен на всасывающем узле для передачи ультразвуковой волны, и узел приема ультразвуковых волн, который расположен на корпусе пылесоса для приема ультразвуковой волны, переданной узлом передачи ультразвуковых волн, и блок управления управляет подвижным узлом для перемещения корпуса пылесоса на основании расстояния между узлом передачи ультразвуковых волн и узлом приема ультразвуковых волн.
6. Пылесос по п.5, в котором, когда расстояние между узлом передачи ультразвуковых волн и узлом приема ультразвуковых волн является первым опорным расстоянием или больше, блок управления управляет корпусом пылесоса для перемещения в направлении, которое становится ближе к узлу передачи ультразвуковых волн.
7. Пылесос по п.5, в котором, когда расстояние между узлом передачи ультразвуковых волн и узлом приема ультразвуковых волн является вторым опорным расстоянием или меньше, блок управления управляет корпусом пылесоса для перемещения в направлении, которое становится удаленным от узла передачи ультразвуковых волн.
8. Пылесос по п.5, в котором, когда расстояние между узлом передачи ультразвуковых волн и узлом приема ультразвуковых волн является первым опорным расстоянием или больше, или вторым опорным расстоянием или меньше, блок управления управляет корпусом пылесоса для перемещения, и первое опорное расстояние больше второго опорного расстояния.
9. Пылесос по п.1, в котором блок управления определяет расстояние между поверхностью пола и корпусом пылесоса на основании информации, полученной вторым устройством обнаружения, и управляет подвижным узлом для остановки, когда расстояние между поверхностью пола и корпусом пылесоса является опорным расстоянием или больше.
10. Пылесос по п.9, в котором второе устройство обнаружения содержит первый узел обнаружения, который обнаруживает препятствие, и второй узел обнаружения, который используется для определения расстояния между поверхностью пола и корпусом пылесоса.
11. Способ управления пылесосом, включающий этапы, на которых
определяют наличие или отсутствие препятствия и выдают множество маршрутов отправления в соответствии с расстоянием между корпусом пылесоса и препятствием и местоположением препятствия;
определяют перемещение всасывающего узла, соединенного с корпусом пылесоса, и определяют заданное местоположение, в которое пылесос будет перемещаться;
определяют маршрут перемещения корпуса пылесоса из одного из множества маршрутов отправления в заданное местоположение; и
управляют подвижным узлом, расположенным на корпусе пылесоса, таким образом, что корпус пылесоса перемещается по маршруту перемещения.
12. Способ по п.11, в котором при управлении корпусом пылесоса управляют подвижным узлом таким образом, что корпус пылесоса перемещается назад, поворачивается в левую или правую сторону и затем перемещается.
13. Способ по п.11, в котором при управлении корпусом пылесоса управляют подвижным узлом таким образом, что корпус пылесоса поворачивается в левую или правую сторону и затем перемещается.
14. Способ по п.11, в котором корпус пылесоса содержит узел обнаружения, который определяет расстояние между поверхностью пола и корпусом пылесоса, и способ дополнительно включает в себя управление подвижным узлом таким образом, что корпус пылесоса останавливается, когда расстояние между поверхностью пола и корпусом пылесоса является опорным расстоянием или больше.
15. Способ по п.11, в котором при определении заданного местоположения то, требуется ли перемещение корпуса пылесоса, определяют на основании расстояния между корпусом пылесоса и всасывающим узлом.

