Настоящее изобретение относится к способу определения закона наведения (наведения) для уклонения от препятствия для летательного аппарата, такого как винтокрылый летательный аппарат, чтобы уклоняться от одного или более препятствий. Летательный аппарат содержит систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с препятствием(ями), и электронную систему для определения закона наведения для уклонения.
Способ реализуется посредством системы для определения закона наведения для уклонения и содержит следующие этапы:
- a) определение одной или более заданных величин среди заданных величин угла траектории полета и скорости, по меньшей мере, одна заданная величина зависит, по меньшей мере, от одного предельного значения вертикальной скорости, по меньшей мере, одна заданная величина содержит вертикальную составляющую в вертикальном направлении, каждое предельное значение вертикальной скорости предоставляется посредством системы предупреждения столкновений следом за обнаружением риска столкновения с препятствием(ями); и
- b) вычисление закона наведения для уклонения в зависимости от определенной заданной величины(ин).
Изобретение также относится к компьютерному программному продукту, подходящему для выполнения такого способа определения.
Изобретение также относится к электронной системе для определения закона наведения для уклонения.
Изобретение также относится к летательному аппарату, такому как винтокрылый летательный аппарат, содержащему систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с одним или более препятствиями, и одну такую электронную систему для определения закона наведения для уклонения.
Способ определения и система вышеупомянутого типа известны из документа EP 1797488 B1,
Летательный аппарат является транспортным самолетом, и когда система предупреждения столкновений обнаруживает риск столкновения, она издает сигнал тревоги. Система предупреждения столкновений также использует предел вертикальной скорости, чтобы определять заданную величину вертикальной скорости. Закон наведения для уклонения, в частности, заданная величина коэффициента нагрузки, затем вычисляется как функция определенной заданной величины вертикальной скорости.
Вычисленная заданная величина коэффициента нагрузки зависит от разницы между значением текущей вертикальной скорости и определенной заданной величиной вертикальной скорости, эта разница умножается на переменную, зависящую от текущей скорости летательного аппарата.
Вычисленные заданные величины коэффициента нагрузки затем автоматически отправляются пилотажному командному прибору, который реализует режим отображения для упомянутых вычисленных заданных величин, чтобы предоставлять помощь в пилотировании для экипажа летательного аппарата.
Однако закон наведения для уклонения, вычисленный с помощью такого способа, является неоптимальным, мощность, требуемая, чтобы поддерживать полет летательного аппарата сбалансированным, приспосабливается так, что она превышает доступную мощность в случае, когда закон наведения является не подходящим, чтобы увидеть уклонение вплоть до завершения.
Целью изобретения, следовательно, является предложение способа и системы, допускающих вычисление более оптимального закона наведения для уклонения посредством уменьшения мощности, требуемой, чтобы поддерживать полет летательного аппарата сбалансированным. В целом, новый закон наведения может принимать во внимание ограничения по характеристикам летательного аппарата и более оптимально управлять его энергией.
Для этого, изобретение относится к способу определения вышеупомянутого типа, в котором, во время этапа a) по меньшей мере, одна определенная заданная величина содержит продольную составляющую в продольном направлении, перпендикулярном вертикальному направлению.
С помощью способа определения согласно изобретению использование заданной величины скорости, содержащего продольную составляющую, такую как заданная величина воздушной скорости, содержащая как вертикальную составляющую, так и продольную составляющую, делает возможным вычисление более оптимального закона наведения для уклонения, в частности, если летательный аппарат является винтокрылым летательным аппаратом. В действительности, на винтокрылом летательном аппарате, общая мощность, необходимая для полета, начинает уменьшаться, когда скорость увеличивается, начиная от нулевой скорости, поскольку наведенная мощность, используемая, чтобы тормозить летательный аппарат, уменьшается. Когда воздушная скорость продолжает увеличиваться, паразитная мощность, получающаяся в результате аэродинамических воздействий относительного воздушного потока на летательный аппарат увеличивается, и общая требуемая мощность также увеличивается. Следовательно, существует воздушная скорость, когда требуемая мощность минимальна. Эта оптимальная воздушная скорость также называется оптимальной воздушной скоростью набора высоты.
Использование заданной величины скорости, содержащей продольную составляющую, такой как заданная величина воздушной скорости, содержащая как вертикальную составляющую, так и продольную составляющую, тогда делает возможным определение закона наведения, предлагающего более оптимальное управление энергией и мощностью летательного аппарата. Закон наведения, например, делает возможным минимизацию мощности, необходимой, чтобы уклоняться от препятствия(ий), посредством варьирования упомянутой продольной составляющей скорости. Маневр уклонения тогда является более продолжительным и безопасным с большим резервом мощности между доступной мощностью и требуемой мощностью.
Согласно другим полезным аспектам изобретения способ определения содержит один или более следующих признаков, рассматриваемых отдельно или согласно любой технический возможной комбинации(ям):
- во время этапа a) определяются первая заданная величина и вторая заданная величина, первая заданная величина является заданной величиной среди заданной величины вертикальной скорости и заданной величины угла траектории полета, вторая заданная величина является заданной величиной воздушной скорости, первая заданная величина содержит вертикальную составляющую, а вторая заданная величина содержит продольную составляющую;
- по меньшей мере, одна заданная величина содержит целевое значение и текущее значение, закон наведения для уклонения вычисляется как функция упомянутого текущего значения, и упомянутое текущее значение сходится в целевое значение согласно закону сходимости;
- разрешенный диапазон значений вертикальной скорости определяется из предельного значения(ий) вертикальной скорости, предоставленного системой предупреждения столкновений, а целевое значение заданной величины вертикальной скорости включено в упомянутый разрешенный диапазон;
- способ дополнительно содержит следующий этап перед этапом b):
- a') измерение одной или более скоростей летательного аппарата, по меньшей мере, в одном направлении из вертикального и продольного направлений, и
во время этапа b), закон наведения для уклонения дополнительно вычисляется как функция измеренной скорости(ей);
- вертикальная скорость и воздушная скорость измеряются во время этапа a'), и
когда первая переменная из измеренной вертикальной скорости и заданной величины вертикальной скорости, предоставленной устройством автопилота, находится в разрешенном диапазоне значений вертикальной скорости, целевое значение заданной величины вертикальной скорости равно первой переменной, а целевое значение заданной величины воздушной скорости равно второй переменной среди измеренной воздушной скорости и заданной величины воздушной скорости, предоставленной устройством автопилота,
когда первая переменная не находится в упомянутом разрешенном диапазоне, целевое значение заданной величины вертикальной скорости является значением, находящимся в упомянутом разрешенном диапазоне, а целевое значение заданной величины воздушной скорости равно оптимальной воздушной скорости набора высоты или второй переменной;
- способ дополнительно содержит следующий этап перед этапом b):
- a'') измерение одного или более ускорений летательного аппарата в направлении из вертикального и продольного направлений, и
во время этапа b), закон наведения для уклонения дополнительно вычисляется как функция измеренного ускорения(ий);
- во время этапа a'') измеряются вертикальное ускорение и продольное ускорение, и вычисляется закон наведения для уклонения, во время этапа b), с одной стороны, как функция заданной величины из заданной величины вертикальной скорости и угла траектории полета и заданной величины вертикального ускорения, а с другой стороны, как функция воздушной скорости и заданной величины продольного ускорения;
- летательный аппарат является винтокрылым летательным аппаратом, и этап b) содержит вычисление, по меньшей мере, одной команды из изменения пространственного положения и изменения положения рычага общего шага;
- во время этапа b), команда изменения пространственного положения вычисляется с помощью следующего уравнения:

где IAS_consigne - заданная величина воздушной скорости,
IAS_ mesurée - измеренная воздушная скорость,
AX_ mesurée - измеренное продольное ускорение, и
K1 и K2 - это коэффициенты усиления, зависящие, по меньшей мере, от высоты и скорости;
- во время этапа b), команда изменения положения рычага общего шага вычисляется с помощью следующего уравнения:

где VZ_consigne - это заданная величина вертикальной скорости,
VZ_ mesurée - это измеренная вертикальная скорость,
AZ_ mesurée - это измеренное вертикальное ускорение, и
K3 и K4 - это коэффициенты усиления, зависящие, по меньшей мере, от высоты и скорости; и
- летательный аппарат дополнительно содержит устройство автопилота, и способ дополнительно содержит, по меньшей мере, один последующий этап после этапа b) из:
- c) отображения закона наведения для уклонения, вычисленного во время этапа b), на экране, просматриваемом экипажем летательного аппарата, чтобы предоставлять экипажу помощь в выполнении маневра уклонения; и
- c') отправки устройству автопилота закона наведения для уклонения, вычисленного во время этапа b), чтобы выполнять маневр автоматически, чтобы уклоняться от препятствия.
Изобретение также относится к компьютерному программному продукту, содержащему заданные величины программного обеспечения, которые, когда реализуются компьютером, выполняют способ, который определен выше.
Изобретение также относится к электронной системе для определения закона наведения для уклонения для летательного аппарата, такого как винтокрылый летательный аппарат, летательный аппарат содержит систему предупреждения столкновения, выполненную с возможностью обнаружения риска столкновения с препятствием(ями),
система содержит средство для определения одной или более заданных величин среди заданных величин угла траектории полета и скорости, по меньшей мере, одна заданная величина зависит, по меньшей мере, от одного предельного значения вертикальной скорости, по меньшей мере, одна заданная величина содержит вертикальную составляющую в вертикальном направлении, каждое предельное значение вертикальной скорости предоставляется системой предупреждения столкновений следом за обнаружением риска столкновения с препятствием(ями); и средство для вычисления закона наведения для уклонения в зависимости от определенной заданной величины(ин) скорости,
при этом, по меньшей мере, одна определенная заданная величина содержит продольную составляющую в продольном направлении, перпендикулярном вертикальному направлению.
Изобретение также относится к летательному аппарату, такому как винтокрылый летательный аппарат, содержащему систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с одним или более препятствиями, и электронную систему определения, как определено выше.
Эти признаки и преимущества изобретения проявятся более ясно по прочтении последующего описания, предоставленного исключительно в качестве неограничивающего примера и выполненного со ссылкой на прилагаемые чертежи, на которых:
- фиг. 1 является схематичным видом летательного аппарата согласно изобретению, летательный аппарат содержит систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с одним или более препятствиями, датчики измерения скорости и ускорения, органы управления полетом, устройство автопилота, экран отображения данных и электронную систему для определения закона наведения для уклонения,
- фиг. 2 является множеством кривых, показывающих различные мощности относительно летательного аппарата, также как и общую мощность, требуемую летательным аппаратом для полета,
- фиг. 3 является блок-схемой последовательности операций способа, согласно изобретению, для определения закона наведения для уклонения, способ реализуется посредством системы определения на фиг. 1, и
- фиг. 4 является более подробной блок-схемой последовательности операций этапа определения заданных величин скорости из блок-схемы последовательности операций на фиг. 3.
На фиг. 1 летательный аппарат 10, такой как винтокрылый летательный аппарат, содержит систему 12 предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с одним или более препятствиями, множество датчиков 14, выполненных с возможностью измерения скорости и ускорения летательного аппарата 10, устройство 16 автопилота летательного аппарата и экран 18 отображения данных.
Летательный аппарат 10 также содержит первый рычаг 20 управления и второй рычаг 22 управления, каждый формирует основной орган управления, которым может манипулировать экипаж 24 летательного аппарата для того, чтобы пилотировать летательный аппарат.
Согласно изобретению, летательный аппарат 10 дополнительно содержит электронную систему 30 для определения закона наведения для уклонения, чтобы летательный аппарат уклонялся от препятствия(ий).
Система 12 предупреждения столкновений, также называемая TCAS (бортовая система предупреждения столкновений), известна сама по себе и подходит для наблюдения за воздушным пространством вокруг летательного аппарата 10, в частности, для того, чтобы обнаруживать другой летательный аппарат, оснащенный соответствующим активным транспондером. Это обнаружение является независимым от управления воздушным движением, выполняемого диспетчерами службы воздушного движения.
Если риск столкновения с одним или более препятствиями идентифицируется, система 12 предупреждения столкновений выполнена с возможностью предоставлять системе 30 определения одно или более предельных значений вертикальной скорости. Система 30 определения затем выполнена с возможностью определять разрешенный диапазон значений вертикальной скорости из предельного значения(ий) вертикальной скорости, принятых от системы 12 предупреждения столкновений.
Когда система 12 предупреждения столкновений предоставляет только минимальное значение вертикальной скорости, разрешенный диапазон значений вертикальной скорости соответствует значениям выше этого минимального значения. Когда система 12 предупреждения столкновений предоставляет только максимальное значение вертикальной скорости, разрешенный диапазон значений вертикальной скорости соответствует значениям ниже этого максимального значения. Наконец, когда система 12 предупреждения столкновений предоставляет как минимальное, так и максимальное значение вертикальной скорости, разрешенный диапазон значений вертикальной скорости задается из значений, находящихся между этими минимальным и максимальным значениями.
Множество датчиков 14 подходит для измерений скоростей и ускорений летательного аппарата 10, в частности, вертикальной скорости VZ и вертикального ускорения AZ в вертикальном направлении Z, т. е. в направлении, перпендикулярном поверхности земли, или в направлении, проходящем, по существу, через центр земли. Далее в данном документе, измеренная вертикальная скорость и измеренное вертикальное ускорение соответственно обозначаются как VZ_ mesurée и AZ_ mesurée.
Специалист в области техники, конечно, поймет, что изобретение применяется аналогичным образом к случаю, когда угол траектории полета, также обозначенный FPA (угол траектории полета), используется вместо вертикальной скорости VZ, с учетом того, что переход от одной переменной к другой выполняется с помощью следующего уравнения:
 (1)
(1)
где VX представляет продольную скорость в продольном направлении X, перпендикулярном вертикальному направлению Z.
Множество датчиков 14 подходит для измерения приборной воздушной скорости (IAS), приборная воздушная скорость, измеренная для летательного аппарата 10, обозначается как IAS_mesurée. Приборная воздушная скорость IAS содержит вертикальную составляющую в вертикальном направлении Z и продольную составляющую в продольном направлении X, перпендикулярном вертикальному направлению Z.
В последующем описании воздушная скорость будет соответствовать, по традиции, приборной воздушной скорости IAS. Специалист в области техники, конечно, поймет, что изобретение применяется аналогично к случаю, когда приборная воздушная скорость является приборной исправленной воздушной скоростью (CAS) или истинной воздушной скоростью (TAS), или MACH.
Множество датчиков 14 также подходит для измерения продольного ускорения AX летательного аппарата 10 в продольном направлении X, измеренное продольное ускорение обозначается как AX_mesurée.
Устройство 16 автопилота известно само по себе, и когда оно активируется, становится возможным автоматическое воздействие на траекторию летательного аппарата 10, без манипуляции основными органами 20, 22 управления экипажем 24 летательного аппарата.
Экран 18 отображения выполнен с возможностью отображать данные, в частности, данные из системы 30 определения, например, чтобы предоставлять помощь в пилотировании экипажу 24 летательного аппарата. В примерном варианте осуществления на фиг. 1 экран 18 отображения является отдельным от системы 30 определения. В альтернативе, которая не показана, экран 18 отображения встроен в систему 30 определения.
Первый и второй рычаги 20, 22 управления известны сами по себе и формируют основные органы управления летательного аппарата 10, которыми манипулирует экипаж 24, чтобы пилотировать летательный аппарат.
Первый рычаг 20 управления, также называемый рычагом общего шага, подходит для управления набором высоты или снижением винтокрылого летательного аппарата 10 в вертикальной плоскости, содержащей вертикальное направление Z и продольное направление X.
Второй рычаг 22 управления, также называемый ручкой управления циклическим шагом или малым рычагом управления, подходит для подачи команды изменения в пространственном положении винтокрылого летательного аппарата 10.
Система 30 определения содержит блок 32 обработки информации, например, сформированный посредством памяти 34 и процессора 36, связанного с памятью 34.
В примерном варианте осуществления на фиг. 1 система 30 определения является отдельной как от системы 12 предупреждения столкновений, так и от устройства 16 автопилота.
В альтернативе, которая не показана, система 30 определения встроена в устройство 16 автопилота. Экран 18 отображения тогда, например, соответствует экрану отображения, не показан, устройства 16 автопилота, а блок 32 обработки информации соответствует блоку обработки информации, не показан, устройства 16 автопилота.
Память 34 выполнена с возможностью хранить программное обеспечение 38 для получения измеренных значений VZ_mesurée, IAS_mesurée скорости и/или значений AZ_mesurée, AX_mesurée ускорения из значений, предоставленных множеством датчиков 14, для предельного значения(ий) вертикальной скорости от системы 12 предупреждения столкновений, а также любых заданных величин VZ_PA вертикальной скорости и заданных величин IAS_PA воздушной скорости, предоставленных посредством устройства 16 автопилота.
Память 34 также выполнена с возможностью хранить программное обеспечение 40 для определения одной или более заданных величин VZ_consigne, IAS_consigne скорости, по меньшей мере, одна заданная величина VZ_consigne скорости зависит, по меньшей мере, от одного предельного значения вертикальной скорости, по меньшей мере, одна заданная величина VZ_consigne, IAS_consigne скорости содержит вертикальную составляющую в вертикальном направлении Z. Согласно изобретению, по меньшей мере, одна заданная величина IAS_consigne скорости, определенная посредством программного обеспечения 40 определения, содержит продольную составляющую в продольном направлении X.
Память 34 также выполнена с возможностью хранить программное обеспечение 42 для вычисления закона наведения для уклонения от препятствия, обнаруженного системой 12 предупреждения столкновений, вычисление закона наведения выполняется как функция определенной заданной величины(ин) VZ_consigne, IAS_consigne скорости.
В качестве необязательного дополнения, память 34 выполнена с возможностью хранить программное обеспечение 44 отображения для отображения данных относительно вычисленного закона наведения для уклонения на экране 18.
В качестве необязательного дополнения, память 34 выполнена с возможностью хранить программное обеспечение 46 для отправки устройству 16 автопилота данных относительно вычисленного закона наведения для уклонения, так что маневр уклонения выполняется автоматически посредством устройства 16 автопилота. Данные, отправленные устройству 16 автопилота, например, содержат команду D_THETA_com изменения пространственного положения и команду D_COLL_com изменения положения рычага общего шага.
Процессор 36 выполнен с возможностью загружать и выполнять каждую из программ 38, 40, 42, 44 и 46 системы программного обеспечения.
Программное обеспечение 38 получения, программное обеспечение 40 определения и программное обеспечение 42 вычисления соответственно формируют средство для получения измеренных значений скорости и/или ускорения, средство для определения одной или более заданных величин скорости и средство для вычисления закона наведения для предотвращения столкновения.
Альтернативно, средство 38 получения, средство 40 определения и средство 42 вычисления выполняются в форме программируемых логических компонентов или в форме специализированных интегральных схем.
В качестве необязательного дополнения, программное обеспечение 44 отображения и программное обеспечение 46 передачи соответственно формируют средство для отображения данных на экране 18 и средство для отправки данных устройству 16 автопилота.
В качестве альтернативы этому дополнению, средство 44 отображения и средство 46 передачи выполняются в форме программируемых логических компонентов или в форме специализированных интегральных схем.
Программное обеспечение 38 получения, например, подходит для получения как значений VZ_mesurée, IAS_mesurée вертикальной скорости и воздушной скорости, так и измеренных значений AZ_mesurée, AX_mesurée вертикального и продольного ускорения. Программное обеспечение 38 получения также подходит для получения предельного значения(ий) вертикальной скорости от системы 12 предупреждения столкновений, а также любых заданных величин вертикальной скорости VZ_PA и воздушной скорости IAS_PA, предоставленных устройством 16 автопилота.
Программное обеспечение 40 определения, например, подходит для вычисления заданной величины VZ_consigne вертикальной скорости и заданной величины IAS_consigne воздушной скорости. Заданная величина VZ_consigne вертикальной скорости содержит только вертикальную составляющую в вертикальном направлении Z, а заданная величина IAS_consigne воздушной скорости содержит как вертикальную составляющую в вертикальном направлении Z, так и продольную составляющую в продольном направлении X.
В описанном примерном варианте осуществления каждая заданная величина VZ_consigne, IAS_consigne скорости содержит целевое значение и текущее значение, закон наведения для уклонения вычисляется как функция текущего значения, и упомянутое текущее значение сходится к целевому значению согласно закону сходимости.
В последующем описании целевое значение и текущее значение заданной величины VZ_consigne вертикальной скорости соответственно обозначаются как VZ_cons_cible и VZ_cons_courante. Целевое значение и текущее значение заданной величины IAS_consigne воздушной скорости соответственно обозначаются как IAS_cons_cible и IAS_cons_courante. Целевое значение VZ_cons_cible заданной величины вертикальной скорости находится в разрешенном диапазоне значений VZ вертикальной скорости, которая определяется из предельного значения(ий) вертикальной скорости, предоставленных системой 12 предупреждения столкновений.
В описанном примере заданная величина VZ_consigne вертикальной скорости затем определяется как функция, по меньшей мере, одного предельного значения вертикальной скорости, предоставленного системой 12 предупреждения столкновений.
Когда первая переменная VZ_reference, выбранная среди измеренной вертикальной скорости VZ_mesurée и любой заданной величины VZ_PA вертикальной скорости, предоставленной устройством 16 автопилота, находится в разрешенном диапазоне значений вертикальной скорости, как описано ранее, целевое значение VZ_cons_cible заданной величины вертикальной скорости, например, равно первой переменной VZ_reference, а целевое значение IAS_cons_cible заданной величины воздушной скорости, например, равно второй переменной IAS_reference, выбранной среди измеренной воздушной скорости IAS_mesurée и любой заданной величины IAS_PA воздушной скорости, предоставленной устройством 16 автопилота.
Иначе, когда первая переменная VZ_reference не находится в упомянутом разрешенном диапазоне, целевое значение VZ_cons_cible заданной величины вертикальной скорости является значением, выбранным из упомянутого разрешенного диапазона, а целевое значение IAS_cons_cible воздушной скорости, например, равно оптимальной воздушной скорости IASмм набора высоты или второй переменной IAS_reference, как будет описано более подробно ниже со ссылкой на фиг. 4.
Когда заданная величина VZ_PA вертикальной скорости предоставляется устройством 16 автопилота, тогда первая переменная VZ_reference предпочтительно равна этой заданной величине VZ_PA, принятой от устройства 16 автопилота. Если устройство 16 автопилота не предоставило какую-либо заданную величину вертикальной скорости системе 30 определения, первая переменная VZ_reference тогда равна измеренной вертикальной скорости VZ_mesurée.
Аналогично, когда заданная величина IAS_PA воздушной скорости предоставляется устройством 16 автопилота, тогда вторая переменная IAS_reference предпочтительно равна этой заданной величине IAS_PA, принятой от устройства 16 автопилота. Если устройство 16 автопилота не предоставило какую-либо заданную величину воздушной скорости системе 30 определения, вторая переменная IAS_reference тогда равна измеренной воздушной скорости IAS_mesurée.
Специалист в области техники отметит, что эта логика является независимой, т. е. отдельной, между первой переменной VZ_reference и второй переменной IAS_reference, устройство 16 автопилота приспосабливается, чтобы предоставлять только заданную величину VZ_PA вертикальной скорости или только заданную величину IAS_PA воздушной скорости, или и заданную величину VZ_PA вертикальной скорости, и заданную величину IAS_PA воздушной скорости, или не предоставлять заданную величину VZ_PA вертикальной скорости и не предоставлять заданную величину IAS_PA воздушной скорости.
Оптимальная воздушная скорость IASмм набора высоты, показанная на фиг. 2, является воздушной скоростью, соответствующей минимальному значению общей мощности, требуемой для полета летательного аппарата 10, общая требуемая мощность соответствует кривой 60 в жирных линиях на фиг. 2. На фиг. 2 кривая 62 представляет наведенную мощность, используемую, чтобы поддерживать летательный аппарат 10, кривая 64 показывает паразитную мощность, получающуюся в результате аэродинамических воздействий относительного воздушного потока на летательный аппарат 10, а кривая 66 показывает профильную мощность, получающуюся в результате работы сил сопротивления на лопастях, общая требуемая мощность является суммой наведенной мощности, паразитной мощности и профильной мощности.
Программное обеспечение 42 вычисления подходит для вычисления закона наведения для уклонения от препятствия(ий) в зависимости от определенной заданной величины(ин) скорости, например, с одной стороны, в зависимости от заданной величины VZ_consigne вертикальной скорости, и, в частности, текущего значения VZ_cons_courante этой заданной величины скорости, а с другой стороны, в зависимости от заданной величины IAS_consigne воздушной скорости, и в частности, текущего значения IAS_cons_courante этой заданной величины скорости.
Закон наведения, вычисленный посредством программного обеспечения 42 вычисления, например, содержит две команды, т. е. первую команду, зависящую от заданной величины VZ_consigne вертикальной скорости и измеренной вертикальной скорости VZ_mesurée, и вторую команду, зависящую от заданной величины IAS_consigne воздушной скорости и измеренной воздушной скорости IAS_mesurée.
Дополнительно, вычисленный закон наведения также зависит, с одной стороны, от вертикального ускорения AZ, а с другой стороны, от продольного ускорения AX. Первая команда тогда зависит от заданной величины VZ_consigne вертикальной скорости, в частности, текущего значения VZ_cons_courante этой заданной величины вертикальной скорости, измеренной вертикальной скорости VZ_mesurée и вертикального ускорения AZ. Аналогично, вторая команда тогда зависит от заданной величины IAS_consigne воздушной скорости, в частности, текущего значения IAS_cons_courante этой заданной величины воздушной скорости, измеренной воздушной скорости IAS_mesurée и продольного ускорения AX.
В описанном примерном варианте осуществления, когда летательный аппарат 10 является винтокрылым летательным аппаратом, первая команда является командой D_COLL_com изменения положения рычага общего шага, а вторая команда является командой D_THETA_com изменения пространственного положения.
Команда D_THETA_com изменения пространственного положения, например, удовлетворяет следующему уравнению:
 (2)
(2)
где IAS_consigne является заданной величиной воздушной скорости,
IAS_mesurée - измеренная воздушная скорость,
AX_mesurée - измеренное продольное ускорение, и
K1 и K2 - это коэффициенты усиления, зависящие, по меньшей мере, от высоты и скорости.
Коэффициент K1 усиления выражается в градусах на м/с и, например, находится между 1 градусом на м/с и 6 градусами на м/с, типично равен 3 градусам на м/с.
Коэффициент K2 усиления выражается в градусах на м/с2 и, например, находится между 0 градусов на м/с2 и 12 градусами на м/с2, типично равен 6 градусам на м/с2.
Когда, кроме того, заданная величина IAS_consigne воздушной скорости содержит целевое значение IAS_cons_cible и текущее значение IAS_cons_courante, команда D_THETA_com изменения пространственного положения предпочтительно удовлетворяет следующему уравнению:
 (3)
(3)
Команда D_COLL_com изменения рычага общего шага, например, удовлетворяет следующему уравнению:
(4)
где VZ_consigne - это заданная величина вертикальной скорости,
VZ_mesurée - это измеренная вертикальная скорость,
AZ_mesurée - это измеренное вертикальное ускорение, и
K3 и K4 - это коэффициенты усиления, зависящие, по меньшей мере, от высоты и скорости.
Коэффициент K3 усиления выражается в % на м/с и, например, находится между 1% на м/с и 4% на м/с, типично равен 2% на м/с.
Коэффициент K4 усиления выражается в % на м/с2 и, например, находится между 0% на м/с2 и 4% на м/с2, типично равен 1% на м/с2.
Аналогично, когда, кроме того, заданная величина VZ_consigne вертикальной скорости содержит целевое значение VZ_cons_cible и текущее значение VZ_cons_courante, команда D_COLL_com изменения рычага общего шага предпочтительно удовлетворяет следующему уравнению:
 (5)
(5)
Работа системы 30 определения согласно изобретению будет сейчас описана с помощью фиг. 3 и 4, соответственно показывающих блок-схему последовательности операций способа для определения закона наведения для уклонения согласно изобретению и подробную блок-схему последовательности операций этапа определения целевых значений VZ_cons_cible, IAS_cons_cible заданных величин скорости.
Во время первоначального этапа 100 значения VZ_mesurée, IAS_mesurée вертикальной скорости и воздушной скорости измеряются посредством множества датчиков 14, затем получаются посредством программного обеспечения 38 получения. Дополнительно, значения AZ_mesurée, AX_mesurée вертикального и продольного ускорения измеряются посредством множества датчиков 14, затем получаются посредством программного обеспечения 38 получения. Эти различные значения скорости и ускорения предпочтительно измеряются в один и тот же момент времени. Программное обеспечение 38 получения также получает предельное значение(я) вертикальной скорости от системы 12 предупреждения столкновений, а также любые заданные величины вертикальной скорости VZ_PA и воздушной скорости IAS_PA, предоставленные устройством 16 автопилота.
Во время этапа 110 программное обеспечение 40 определения затем определяет заданную величину VZ_consigne вертикальной скорости и заданную величину IAS_consigne воздушной скорости, в частности, с помощью измеренных значений VZ_mesurée, IAS_mesurée вертикальной скорости и воздушной скорости, полученных ранее. Этот этап 110 определения делится на подэтапы, показанные на фиг. 4.
На фиг. 4, во время подэтапа 115, программное обеспечение 40 определения начинает с определения того, находится ли первая переменная VZ_reference в разрешенном диапазоне значений вертикальной скорости. Как ранее описано, разрешенный диапазон значений вертикальной скорости определяется из предельного значения(ий) вертикальной скорости, принятых от системы 12 предупреждения столкновения.
Если первая переменная VZ_reference находится в разрешенном диапазоне значений вертикальной скорости, тогда во время подэтапа 120 программное обеспечение 40 определения определяет целевое значение VZ_cons_cible заданной величины вертикальной скорости как равное первой переменной VZ_reference.
Иначе, во время подэтапа 125, программное обеспечение 40 определения вычисляет целевое значение VZ_cons_cible заданной величины вертикальной скорости, выбирая значение в разрешенном диапазоне значений вертикальной скорости. Выбранное значение является, например, значением упомянутого разрешенного диапазона, которое является ближайшим к первой переменной VZ_reference. Альтернативно, выбранное значение является значением из упомянутого разрешенного диапазона, которое является ближайшим к первой переменной VZ_reference, к или из которой запас добавляется или вычитается, так что выбранное целевое значение VZ_cons_cible отделяется от упомянутого предельного значения(ий) вертикальной скорости, по меньшей мере, этим запасом.
Во время подэтапа 130 программное обеспечение 40 определения затем определяет, больше ли целевое значение VZ_cons_cible заданной величины вертикальной скорости, ранее вычисленной во время подэтапа 125, чем первая переменная VZ_reference.
Если вычисленное целевое значение VZ_cons_cible заданной величины вертикальной скорости больше первой переменной VZ_reference, тогда программное обеспечение 40 определения далее проверяет, во время подэтапа 135, меньше ли вторая переменная IAS_reference, чем оптимальная воздушная скорость IASмм набора высоты.
Если вычисленное целевое значение VZ_cons_cible заданной величины вертикальной скорости, наоборот, меньше первой переменной VZ_reference, программное обеспечение 40 определения проверяет, во время подэтапа 140, меньше ли вторая переменная IAS_reference, чем оптимальная воздушная скорость IASмм набора высоты.
Во время подэтапа 135, если вторая переменная IAS_reference меньше оптимальной воздушной скорости IASмм набора высоты, тогда программное обеспечение 40 определения определяет, во время подэтапа 145, целевое значение IAS_cons_cible заданной величины воздушной скорости как равное второй переменной IAS_reference.
Если, однако, во время подэтапа 135, вторая переменная IAS_reference больше или равна оптимальной воздушной скорости IASмм набора высоты, тогда программное обеспечение 40 определения определяет, во время подэтапа 150, целевое значение IAS_cons_cible заданной величины воздушной скорости как равное оптимальной воздушной скорости IASмм набора высоты.
Во время подэтапа 140, если вторая переменная IAS_reference меньше оптимальной воздушной скорости IASмм набора высоты, тогда программное обеспечение 40 определения переходит к подэтапу 150, и целевое значение IAS_cons_cible заданной величины воздушной скорости тогда равно оптимальной воздушной скорости IASмм набора высоты.
Если, однако, во время подэтапа 140, вторая переменная IAS_reference больше или равна оптимальной воздушной скорости IASмм набора высоты, тогда программное обеспечение 40 определения переходит к подэтапу 145, и целевое значение IAS_cons_cible заданной величины воздушной скорости тогда равно второй переменной IAS_reference.
После подэтапа 120 программное обеспечение 40 определения переходит к подэтапу 145, и целевое значение IAS_cons_cible заданной величины воздушной скорости тогда равно второй переменной IAS_reference.
Другими словами, стратегия для определения целевого значения IAS_cons_cible заданной величины воздушной скорости является следующей:
- если целевое значение VZ_cons_cible заданной величины вертикальной скорости является неизменным относительно первой переменной VZ_reference (подэтап 120), тогда целевое значение IAS_cons_cible заданной величины воздушной скорости также является неизменным и равно второй переменной IAS_reference;
- если целевое значение VZ_cons_cible заданной величины вертикальной скорости больше первой переменной VZ_reference (положительный ответ на проверку на подэтапе 130), т. е. если вертикальная скорость должна быть увеличена, и если вторая переменная IAS_reference больше оптимальной воздушной скорости IASмм набора высоты (отрицательный ответ на проверку на подэтапе 135), тогда оптимальная воздушная скорость IASмм набора высоты используется в качестве целевого значения IAS_cons_cible для заданной величины воздушной скорости. Это делает возможным использование кинетической энергии, чтобы способствовать набору высоты, как показано на фиг. 2 с воздушной скоростью IAS1 и стрелкой F1, и уменьшает общую мощность, требуемую в течение более длительного срока, т. е. когда воздушная скорость становится ближе к оптимальной воздушной скорости набора высоты.
- если целевое значение VZ_cons_cible заданной величины вертикальной скорости меньше или равно первой переменной VZ_reference (отрицательный ответ на проверку на подэтапе 130), т. е. если вертикальная скорость должна быть уменьшена, и если вторая переменная IAS_reference ниже оптимальной воздушной скорости IASмм набора высоты (положительный ответ на проверку на подэтапе 140), оптимальная воздушная скорость IASмм набора высоты также используется в качестве целевого значения IAS_cons_cible для заданной величины воздушной скорости. Это делает возможным перенос энергии, способствующей снижению, как показано на фиг. 2 с воздушной скоростью IAS2 и стрелкой F2, и помещает летательный аппарат 10 в хорошую конфигурацию, чтобы выполнять другие маневры, в то же время увеличивая запас доступной мощности через уменьшение общей требуемой мощности.
- в других случаях (положительный ответ на проверку на подэтапе 135 или отрицательный ответ на проверку на подэтапе 140), целевое значение IAS_cons_cible заданной величины воздушной скорости является неизменным и равным второй переменной IAS_reference.
В конце этапа 110, после подэтапа 145 или подэтапа 150, программное обеспечение 40 определения также определяет текущие значения IAS_cons_courante, VZ_cons_courante заданной величины воздушной скорости и заданной величины воздушной скорости с помощью целевых значений IAS_cons_cible, VZ_cons_cible, ранее определенных как функция закона сходимости текущего значения к соответствующему целевому значению.
Сходимость текущего значения VZ_cons_courante заданной величины вертикальной скорости к соответствующему целевому значению VZ_cons_cible, например, следует аффинному закону. Другими словами, динамика для того, чтобы текущее значение VZ_cons_courante соединилось в целевое значение VZ_cons_cible, т. е. дрейф относительно времени текущего значения VZ_cons_courante, является постоянной, пока целевое значение VZ_cons_cible не будет достигнуто. Дрейф относительно времени текущего значения VZ_cons_courante, например, равен, в абсолютном значении, 400 фут/мин. в секунду. Выбор закона сходимости тогда делает возможным гарантирование вертикального ускорения, допускающего обеспечение быстрой реакции, чтобы уклоняться от препятствия(ий), в то же время поддерживая некоторый запас мощности.
Динамика для того, чтобы текущее значение IAS_cons_courante заданной величины воздушной скорости соединялось с целевым значением IAS_cons_cible, т. е. дрейф относительно времени текущего значения IAS_cons_courante, например, зависит от измеренной воздушной скорости IAS_mesurée и разности между целевым значением IAS_cons_cible и текущим значением IAS_cons_courante заданной величины воздушной скорости. Абсолютное значение дрейфа относительно времени текущего значения IAS_cons_courante, например, удовлетворяет следующему уравнению:
 (6)
(6)
для значений K * |VZ_cons_cible - VZ_cons_courante|, находящихся между минимальным продольным ускорением AXmin и максимальным продольным ускорением AXmax; где K является коэффициентом усиления, выраженным в узлах/с на фут/мин.
Знак дрейфа относительно времени текущего значения IAS_cons_courante является знаком разности между целевым значением и текущим значением заданной величины воздушной скорости, обозначенной как IAS_cons_cible - IAS_cons_courante. Текущее значение IAS_cons_courante заданной величины воздушной скорости тогда сходится к целевому значению IAS_cons_cible.
Другими словами, дрейф относительно времени текущего значения IAS_cons_courante, например, удовлетворяет следующему уравнению:
 (7)
(7)
где sgn является знаковой функцией, которая равна +1, если разность (IAS_cons_cible - IAS_cons_courante) является положительной, 0, если равна нулю, и -1, если она является отрицательной;
med - это медианная функция, которая равна среднему значению из трех значений (K*|VZ_cons_cible - VZ_cons_courange|), AXmin и AXmax. Это дает возможность ограничиваться значениями продольного ускорения AX, находящимися между минимальным продольным ускорением AXmin и максимальным продольным ускорением AXmax.
В качестве примера, значение коэффициента K усиления равно 1/500 узлов на фут/мин., минимальное и максимальное значения продольного ускорения AXmin и AXmax соответственно равны 1 узлу/с и 2 узла/с.
С этим примером значения, если отклонение вертикальной скорости больше 1000 футов, текущее значение заданной величины IAS_cons_courante воздушной скорости сходится при 2 узлах/с к целевому значению IAS_cons_cible. Если отклонение вертикальной скорости находится между 500 и 1000 футами, текущее значение заданной величины IAS_cons_courante воздушной скорости сходится к целевому значению IAS_cons_cible при K-кратном вычисленном отклонении вертикальной скорости. Наконец, если отклонение вертикальной скорости меньше 500 футов, текущее значение заданной величины IAS_cons_courante воздушной скорости сходится при 1 узле/с к целевому значению IAS_cons_cible.
Это тогда дает возможность ускорять динамику соединения для воздушной скорости, когда эксплуатационная характеристика требует этого, или будет требовать этого вскоре, или наоборот, предлагает более медленную динамику соединения для воздушной скорости, если маневр уклонения не требует чрезмерно высокой динамики. В последнем случае, это тогда делает возможным поддержание более значительного запаса мощности для большей безопасности летательного аппарата 10.
Альтернативно, дрейф относительно времени закона сходимости текущего значения IAS_cons_courante к целевому значению IAS_cons_cible является постоянным и, например, равен в абсолютном значении 1 узлу/с.
Во время этапа 160, показанного на фиг 3, программное обеспечение 42 вычисления затем вычисляет закон наведения для уклонения от препятствия на основе определенной заданной величины(ин) скорости. В описанном примере программное обеспечение 42 вычисления вычисляет команду D_THETA_com изменения пространственного положения в зависимости от текущего значения IAS_cons_courante заданной величины воздушной скорости, измеренной воздушной скорости IAS_mesurée и измеренного продольного ускорения AX_mesurée согласно уравнению (2). Программное обеспечение 42 вычисления также вычисляет команду D_COLL_com изменения положения рычага общего шага в зависимости от текущего значения VZ_cons_courante заданной величины вертикальной скорости, измеренной вертикальной скорости VZ_mesurée и измеренного вертикального ускорения AZ_mesurée согласно уравнению (4).
После этапа 160 система 30 определения переходит к этапу 170, во время которого ее программное обеспечение 44 отображения управляет отображением на экране 18 данных относительно вычисленного закона наведения для уклонения.
Альтернативно или дополнительно, после этапа 160, система 30 определения переходит к этапу 180, во время которого ее программное обеспечение 46 передачи отправляет устройству 16 автопилота данные относительно вычисленного закона наведения для уклонения, так что маневр уклонения выполняется автоматически посредством устройства 16 автопилота. Программное обеспечение 46 передачи, в частности, отправляет значения команд изменения D_THETA_com пространственного положения и D_COLL_com положения рычага общего шага, ранее вычисленные во время этапа 160.
В конце этапа 160 система 30 определения возвращается к этапу 100 для того, чтобы получать, через свое программное обеспечение 38 получения, новые значения измеренных вертикальной и воздушной скоростей VZ_mesurée, IAS_mesurée и измеренных вертикального и продольного ускорений AZ_mesurée, AX_mesurée.
После возврата к этапу 100 система 30 определения переходит к этапу 110 для того, чтобы определять новые заданные величины скорости. Это новое определение предпочтительно выполняется посредством изменения только текущих значений VZ_cons_courante и IAS_cons_courante заданных величин вертикальной скорости и воздушной скорости по направлению к их соответствующим целевым значениям VZ_cons_cible и IAS_cons_cible в зависимости от ассоциированных законов сходимости, и в то же время сохраняя целевые значения VZ_cons_cible и IAS_cons_cible, определенные во время первого прохождения посредством этапа 110.
Соответствующие целевые значения VZ_cons_cible и IAS_cons_cible предпочтительно модифицируются, только если существует модификация данных, приходящих от системы 12 предупреждения столкновений, или данных, приходящих от устройства 16 автопилота. Другими словами, соответствующие целевые значения VZ_cons_cible и IAS_cons_cible модифицируются тогда, только если необходимо изменять маневр уклонения, например, следом за новым препятствием или следом за окончанием препятствия или следуя модификации траектории препятствия.
Система 30 определения и способ определения согласно изобретению делают возможным вычисление более оптимального закона наведения для уклонения, принимая во внимание не только заданную величину скорости, содержащую вертикальную составляющую в вертикальном направлении Z, как делается на уровне техники, в то же время принимая во внимание только заданную величину вертикальной скорости, но также заданную величину скорости, содержащую продольную составляющую в продольном направлении X, перпендикулярном вертикальному направлению Z. Заданная величина скорости, содержащая продольную составляющую, например, является заданной величиной воздушной скорости, которая содержит и вертикальную составляющую, и продольную составляющую.
Закон наведения для уклонения, таким образом, определенный согласно изобретению, может предлагать более оптимальное управление энергией летательного аппарата 10, в частности, посредством изменения мощности, требуемой, чтобы выполнять маневр уклонения. Маневр уклонения тогда является более длительным и безопасным, в частности, приводя летательный аппарат 10 в точку сбалансированного полета, соответствующую оптимальной воздушной скорости IASмм набора высоты.
Управление энергией также допускает выполнение более быстрых маневров уклонения, в частности, в случае преобразования кинетической энергии из скорости движения вперед в потенциальную энергию для более быстрого набора высоты, как показано стрелкой F1 на фиг. 2.
Когда каждая заданная величина VZ_consigne, IAS_consigne скорости дополнительно имеет целевое значение VZ_cons_cible, IAS_cons_cible и текущее значение VZ_cons_courante, IAS_cons_courante, с законом сходимости текущего значения к соответствующему целевому значению, выбор законов сходимости делает возможным выполнение более естественного маневра уклонения, т. е. более близкого к маневру, который был бы выполнен пилотом.
Согласно второму варианту осуществления система 30 определения подходит для определения заданной величины FPA_consigne угла траектории полета вместо заданной величины VZ_consigne вертикальной скорости. В действительности, в свете соотношения, ранее описанного с помощью уравнения (1) между вертикальной скоростью VZ и углом FPA траектории полета, специалист в области техники поймет, что система 30 определения также подходит для вычисления закона наведения для уклонения в зависимости от определенной заданной величины FPA_consigne угла траектории полета и заданной величины IAS_consigne воздушной скорости.
Аналогично тому, что было ранее описано для первого варианта осуществления, заданная величина FPA_consigne угла траектории полета и заданная величина IAS_consigne воздушной скорости, каждая, например, содержат целевое значение FPA_cons_cible, IAS_cons_cible и текущее значение FPA_cons_courante, IAS_cons_courante, закон наведения для уклонения вычисляется как функция текущего значения, и упомянутое текущее значение тогда сходится к целевому значению согласно закону сходимости.
Команда D_THETA_com изменения пространственного положения, например, подтверждает уравнение (2), или необязательно в дополнение уравнение (3), ранее описанные для первого режима приема с неизменными коэффициентами K1, K2 усиления.
Согласно этому второму варианту осуществления команда D_COLL_com изменения положения рычага общего шага тогда, например, удовлетворяет следующему уравнению:
 (8)
(8)
где FPA_consigne - это заданная величина угла траектории полета,
FPA_mesurée - это измеренный угол траектории полета,
AZ_mesurée - это измеренное вертикальное ускорение, и
K5 и K6 - это коэффициенты усиления, зависящие, по меньшей мере, от высоты и скорости.
Коэффициент K5 усиления выражается в % на градус и, например, находится между 0,2% на градус и 8% на градус, типично равен 1% на градус.
Коэффициент K6 усиления выражается в % на град./с и, например, находится между 0% на град./с и 8% на град./с, типично равен 0,5% на град./с.
Аналогично, когда в качестве необязательного дополнения, заданная величина FPA_consigne угла траектории полета содержит целевое значение FPA_cons_cible и текущее значение FPA_cons_courante, команда D_COLL_com изменения положения рычага общего шага предпочтительно удовлетворяет следующему уравнению:
 (9)
(9)
Согласно этому второму варианту осуществления заданная величина VZ_consigne угла траектории полета тогда, например, определяется как функция, по меньшей мере, одного предельного значения вертикальной скорости, предоставленного системой 12 предупреждения столкновений, более конкретно, как функция разрешенного диапазона значений угла траектории полета, вычисленных с помощью уравнения (1), и разрешенного диапазона значений вертикальной скорости, ранее описанных для первого варианта осуществления.
Когда третья переменная FPA_reference, выбранная среди измеренного угла FPA_mesurée траектории полета и любой заданной величины FPA_PA угла траектории полета, предоставленной устройством 16 автопилота, находится в разрешенном диапазоне значений углов траектории полета, целевое значение FPA_cons_cible заданной величины угла траектории полета, например, равно третьей переменной FPA_reference, а целевое значение IAS_cons_cible заданной величины воздушной скорости, например, равно второй переменной IAS_reference, выбранной среди измеренной воздушной скорости IAS_mesurée и любой заданной величины IAS_PA воздушной скорости, предоставленной устройством 16 автопилота.
Иначе, когда третья переменная FPA_reference не находится в упомянутом разрешенном диапазоне значений угла траектории полета, целевое значение FPA_cons_cible заданной величины угла траектории полета является значением, выбранным из упомянутого разрешенного диапазона значений угла траектории полета, а целевое значение IAS_cons_cible заданной величины воздушной скорости, например, равно оптимальной воздушной скорости IASмм набора высоты или второй переменной IAS_reference.
Работа системы 30 определения согласно этому второму варианту осуществления тогда аналогична работе системы, ранее описанной для первого варианта осуществления, каждый раз заменяющей заданную величину VZ_consigne вертикальной скорости заданной величиной FPA_consigne угла траектории полета, или дополнительно текущее значение VZ_cons_courante и целевое значение VZ_cons_cible заданной величины вертикальной скорости текущим значением FPA_cons_courante и целевым значением FPA_cons_cible заданной величины угла траектории полета, соответственно, также как заменяя первую переменную VZ_reference третьей переменной FPA_reference, если применимо, как описано выше.
Согласно этому второму варианту осуществления программное обеспечение 40 определения, таким образом, определяет заданную величину FPA_consigne угла траектории полета и заданную величину IAS_consigne воздушной скорости во время этапа 110 с помощью измеренных значений FPA_mesurée, IAS_mesurée угла траектории полета и воздушной скорости, полученных ранее во время этапа 100.
Этот этап 110 определения делится на подэтапы, аналогично тому, что было ранее описано для первого варианта осуществления со ссылкой на фиг. 4, заменяя первую переменную VZ_reference третьей переменной FPA_reference, а также текущее значение VZ_cons_courante и целевое значение VZ_cons_cible заданной величины вертикальной скорости текущим значением FPA_cons_courante и целевым значением FPA_cons_cible заданной величины угла траектории полета, соответственно.
Схождение текущего значения FPA_cons_courante заданной величины угла траектории полета к соответствующему целевому значению FPA_cons_cible, например, следует аффинному закону. Дрейф относительно времени текущего значения FPA_cons_courante, например, равен в абсолютном значении 4 градусам в секунду.
Динамика для того, чтобы текущее значение IAS_cons_courante заданной величины воздушной скорости соединялось с целевым значением IAS_cons_cible, т. е. дрейф относительно времени текущего значения IAS_cons_courante, например, зависит от измеренной воздушной скорости IAS_mesurée и разности между целевым значением IAS_cons_cible и текущим значением IAS_cons_courante заданной величины воздушной скорости.
Согласно этому второму варианту осуществления, абсолютное значение дрейфа относительно времени текущего значения IAS_cons_courante, например, удовлетворяет следующему уравнению:
 (10)
(10)
для значений продольного ускорения AX, находящихся между минимальным продольным ускорением AXmin и максимальным продольным ускорением AXmax;
где K' - это коэффициент усиления, выраженный в узлах в секунду на градус.
Дрейф относительно времени текущего значения IAS_cons_courante, например, удовлетворяет следующему уравнению:
 (11)
(11)
где sgn является знаковой функцией, которая равна +1, если разность (IAS_cons_cible - IAS_cons_courante) является положительной, 0, если равна нулю, и -1, если она является отрицательной;
med является медианной функцией, которая равна среднему значению из трех значений (K' * |FPA_cons_cible - FPA_cons_courante|), AXmin и AXmax. Это дает возможность ограничиваться значениями продольного ускорения AX, находящимися между минимальным продольным ускорением AXmin и максимальным продольным ускорением AXmax.
В качестве примера, значение коэффициента K' усиления равно 0,25 узлов в секунду на градус, а минимальное и максимальное значения продольного ускорения AXmin и AXmax соответственно равняются 1 узлу в секунду и 2 узлам в секунду.
Преимущества второго варианта осуществления идентичны преимуществам первого варианта осуществления, описанного ранее, и не описываются снова.
Специалист в области техники поймет, что закон наведения для уклонения является законом наведения, вычисленным для того, чтобы уклоняться от препятствия(ий), закон наведения содержит одну или более команд наведения для летательного аппарата 10. Как ранее указано, компьютерный закон наведения, например, содержит две команды, т. е. первую команду, зависящую от заданной величины VZ_consigne вертикальной скорости и измеренной вертикальной скорости VZ_mesurée, и вторую команду, зависящую от заданной величины IAS_consigne воздушной скорости и измеренной воздушной скорости IAS_mesurée.



Способ определения закона наведения для уклонения летательного аппарата (ЛА) от препятствий реализуется посредством системы для определения упомянутого закона наведения. ЛА содержит систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с препятствиями и упомянутую систему определения. Определяют заданные величины среди заданных величин угла траектории полета и скорости, причем заданная величина зависит от предельного значения вертикальной скорости, заданная величина содержит вертикальную составляющую в вертикальном направлении, каждое предельное значение вертикальной скорости предоставляется системой предупреждения столкновений следом за обнаружением риска столкновения с препятствиями. Вычисляют закон наведения для уклонения в зависимости от заданных величин. Во время этапа определения заданная величина содержит продольную составляющую в продольном направлении, перпендикулярном вертикальному направлению. 3 н. и 6 з.п. ф-лы, 4 ил.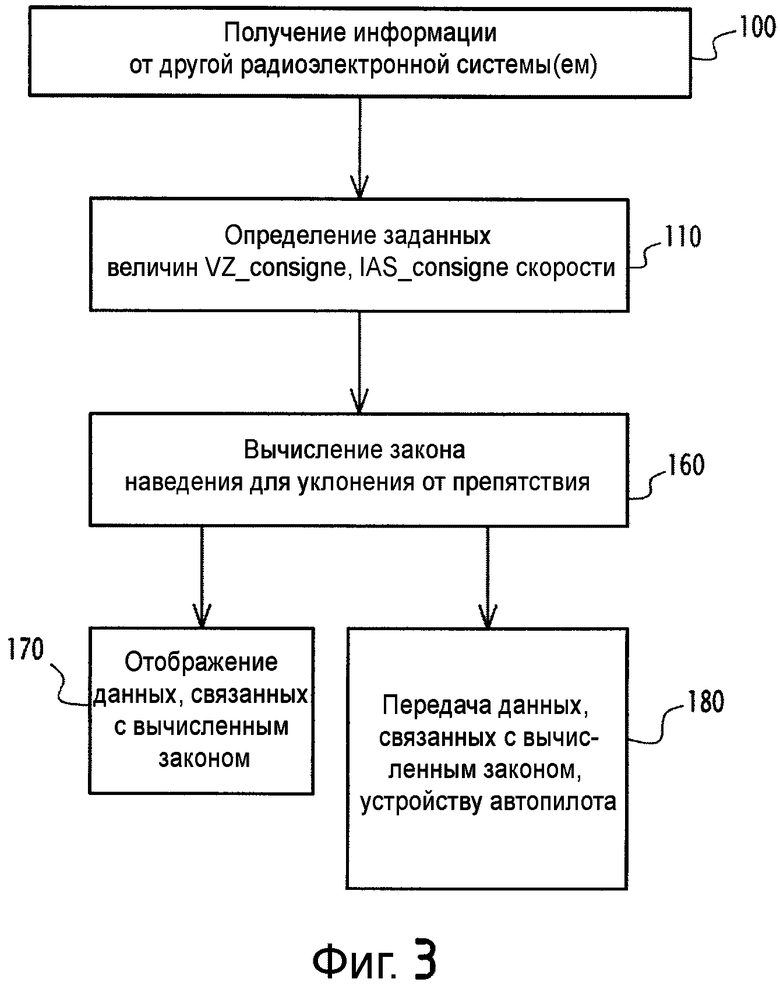
1. Способ определения закона наведения для уклонения летательного аппарата, такого как винтокрылый летательный аппарат, чтобы уклоняться от одного или более препятствий, причем летательный аппарат содержит систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с препятствием(ями), и электронную систему для определения закона наведения для уклонения,
способ реализуется посредством системы для определения закона наведения для уклонения и содержит следующие этапы, на которых:
- a) определяют одну или более заданных величин среди заданных величин угла траектории полета и скорости, причем по меньшей мере одна заданная величина зависит от по меньшей мере одного предельного значения вертикальной скорости, по меньшей мере одна заданная величина содержит вертикальную составляющую в вертикальном направлении, каждое предельное значение вертикальной скорости предоставляется системой предупреждения столкновений следом за обнаружением риска столкновения с препятствием(ями), и
- b) вычисляют закон наведения для уклонения в зависимости от определенной(ых) заданной(ых) величины(ин),
отличающийся тем, что во время этапа a) по меньшей мере одна определенная заданная величина содержит продольную составляющую в продольном направлении, перпендикулярном вертикальному направлению, при этом во время этапа a) определяют первую заданную величину и вторую заданную величину, причем первая заданная величина является заданной величиной среди заданной величины вертикальной скорости и заданной величины угла траектории полета, вторая заданная величина является заданной величиной воздушной скорости, первая заданная величина содержит вертикальную составляющую, а вторая заданная величина содержит продольную составляющую,
при этом по меньшей мере одна заданная величина содержит целевое значение и текущее значение, закон наведения для уклонения вычисляют в зависимости от упомянутого текущего значения, и упомянутое текущее значение сходится к целевому значению согласно закону сходимости;
при этом разрешенный диапазон значений вертикальной скорости определяют из предельного(ых) значения(ий) вертикальной скорости, предоставленных системой предупреждения столкновений, а целевое значение заданной величины вертикальной скорости находится в упомянутом разрешенном диапазоне;
при этом перед этапом b) способ дополнительно содержит следующий этап, на котором:
- a') измеряют одну или более скоростей летательного аппарата в по меньшей мере одном направлении из вертикального и продольного направлений, и
при этом во время этапа b) закон наведения для уклонения вычисляют в зависимости от измеренной(ых) скорости(ей); и
при этом вертикальную скорость и воздушную скорость измеряют во время этапа a'), и,
когда первая переменная из измеренной вертикальной скорости и заданной величины вертикальной скорости, предоставленной устройством автопилота, находится в разрешенном диапазоне значений вертикальной скорости, целевое значение заданной величины вертикальной скорости равно первой переменной, а целевое значение заданной величины воздушной скорости равно второй переменной среди измеренной воздушной скорости и заданной величины воздушной скорости, предоставленной устройством автопилота,
когда первая переменная не находится в упомянутом разрешенном диапазоне, целевое значение заданной величины вертикальной скорости является значением, находящимся в упомянутом разрешенном диапазоне, а целевое значение заданной величины воздушной скорости равно оптимальной воздушной скорости набора высоты или второй переменной.
2. Способ по п. 1, при этом перед этапом b) способ дополнительно содержит следующий этап, на котором:
- a') измеряют одно или более ускорений летательного аппарата в направлении из вертикального и продольного направлений, и
при этом во время этапа b) закон наведения для уклонения дополнительно вычисляют в зависимости от измеренного(ых) ускорения(ий).
3. Способ по п. 2, при этом во время этапа a'') измеряют вертикальное ускорение и продольное ускорение, и закон наведения для уклонения вычисляют во время этапа b), с одной стороны, в зависимости от заданной величины из заданной величины вертикальной скорости и угла траектории полета и заданной величины вертикального ускорения, а, с другой стороны, в зависимости от воздушной скорости и заданной величины продольного ускорения.
4. Способ по п. 1 или 2, при этом летательный аппарат является винтокрылым летательным аппаратом, а этап b) содержит вычисление по меньшей мере одной команды среди команды изменения пространственного положения и команды изменения положения рычага общего шага.
5. Способ по п. 4, при этом во время этапа b) команду изменения пространственного положения вычисляют с помощью следующего уравнения:
 ,
,
где IAS_consigne – это заданная величина воздушной скорости,
IAS_mesurée - это измеренная воздушная скорость,
AX_mesurée - это измеренное продольное ускорение, и
K1 и K2 - это коэффициенты усиления, зависящие по меньшей мере от высоты и скорости.
6. Способ по п. 5, при этом во время этапа b) команду изменения положения рычага общего шага вычисляют с помощью следующего уравнения:
 ,
,
где VZ_consigne - это заданная величина вертикальной скорости,
VZ_ mesurée - это измеренная вертикальная скорость,
AZ_ mesurée - это измеренное вертикальное ускорение, и
K3 и K4 - это коэффициенты усиления, зависящие по меньшей мере от высоты и скорости.
7. Способ по п. 1, при этом летательный аппарат дополнительно содержит устройство автопилота, и
при этом способ дополнительно содержит по меньшей мере один последующий этап после этапа b) из этапов, на которых:
- c) отображают закон наведения для уклонения, вычисленный во время этапа b), на экране, просматриваемом экипажем летательного аппарата, чтобы предоставлять экипажу помощь в выполнении маневра уклонения; и
- c') отправляют устройству автопилота закон наведения для уклонения, вычисленный во время этапа b), чтобы автоматически выполнять маневр по уклонению от препятствия.
8. Электронная система определения для определения закона наведения для уклонения в соответствии со способом по п. 1 для летательного аппарата, такого как винтокрылый летательный аппарат, чтобы уклоняться от одного или более препятствий, причем летательный аппарат содержит систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с препятствием(ями),
а система содержит:
- средство для определения одной или более заданных величин среди заданных величин угла траектории полета и скорости, причем по меньшей мере одна заданная величина зависит от по меньшей мере одного предельного значения вертикальной скорости, по меньшей мере одна заданная величина содержит вертикальную составляющую в вертикальном направлении, каждое предельное значение вертикальной скорости предоставляется системой предупреждения столкновений следом за обнаружением риска столкновения с препятствием(ями), и
средство для вычисления закона наведения для уклонения в зависимости от определенной заданной величины(ин) скорости,
отличающаяся тем, что по меньшей мере одна определенная заданная величина содержит продольную составляющую в продольном направлении, перпендикулярном вертикальному направлению.
9. Летательный аппарат, такой как винтокрылый летательный аппарат, содержащий систему предупреждения столкновений, выполненную с возможностью обнаружения риска столкновения с одним или более препятствиями, и электронную систему определения для определения закона наведения для уклонения летательного аппарата, отличающуюся тем, что электронная система определения является системой по п. 8.
| CN 103337199 A, 02.10.2013 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СИСТЕМА И СПОСОБ ДЛЯ РАСПОЗНАВАНИЯ МАНЕВРОВ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА В КОНФЛИКТНЫХ СИТУАЦИЯХ | 2007 |
|
RU2461889C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УКЛОНЕНИЯ ОТ СТОЛКНОВЕНИЙ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2343528C1 |

