ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение направлено на систему и способ для распознавания маневров для транспортного средства в конфликтных ситуациях. Настоящее изобретение имеет конкретное, но неисключительное, применение к системе отображения летательных аппаратов для избежания столкновения в воздухе между летательными аппаратами или, наоборот, перехвата угрозы в воздухе. Кроме того, будет приниматься во внимание, что изобретение также может использоваться на морских судах для подобных целей.
В качестве используемого в материалах настоящей заявки выражение «транспортное средство» не ограничено традиционными транспортными средствами, такими как самолеты, корабли, автомобили, и т.п., но также включает в себя необитаемые транспортные средства.
В качестве используемого в материалах настоящей заявки выражение «конфликтная ситуация» должно быть задано широким значением и указывает ссылкой на ситуацию, в которой транспортное средство может сталкиваться с другим объектом в смысле наличия удара, либо близкого или опасного сближения между транспортным средством и другим объектом. Выражение включает в себя, но не в качестве ограничения удар транспортным средством, опасное сближение и перехват угрозы.
В качестве используемого в материалах настоящей заявки «условие» указывает ссылкой на различные параметры, ассоциативно связанные с транспортным средством или объектом. Таковые включают в себя, но не в качестве ограничения, положение (в том числе абсолютную высоту) азимут, курс, скорость, ускорение и т.п.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Системы предупреждения столкновений в транспортных средствах известны. Системы, применяемые в настоящее время, используют отображения собственной области транспортного средства, которые являются производными систем, основанных на инерциальных, радиолокационных и гидроакустических датчиках, и дают визуальное представление наличия другого транспортного средства. Такие системы выдают ограниченную информацию о том, каким образом оптимально отруливать в сторону от потенциального конфликта.
Примером системы, используемой в настоящее время на летательном аппарате, является система извещения о воздушном движении и предупреждения опасного сближения (TCASII). Когда второй летательный аппарат, известный как нарушитель, обнаруживается бортовой системой первого летательного аппарата, предупредительный сигнал передается экипажу в кабине. Это известно в качестве справочного сигнала воздушного движения. Система затем издает внятную и визуальную команду, чтобы пилот набрал высоту или снизился. Это известно в качестве справочного сигнала разрешения.
Подобный справочный сигнал воздушного движения принимается экипажем второго летательного аппарата, если оборудован таким образом. Однако справочная команда разрешения, принятая на втором летательном аппарате (если оборудован таким образом), противоположна выданной на первый летательный аппарат. Поэтому система выдает наводящий маневр (набор высоты или снижение) на оба летательных аппарата, чтобы избежать столкновения. Несмотря на то, что есть бортовой индикатор для системы, он является довольно непонятным и не мог бы опознавать второй летательный аппарат в области конфликта.
Как обсуждено выше, TCASII выдает только вариант выбора набора высоты или снижения пилоту, чтобы избежать конфликта. Пилот не принимает команду повернуть или изменить скорость. Кроме того, система TCASII не может в достаточной мере управлять многочисленными летательными аппаратами в зоне потенциального конфликта.
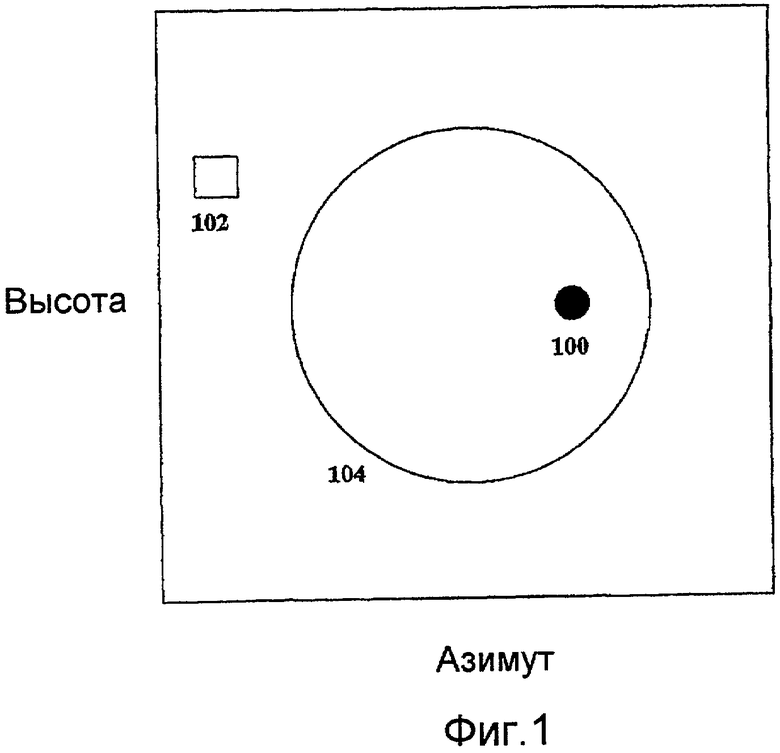
Еще одной системой предшествующего уровня техники для распознавания конфликтов является радиолокационный индикатор воздушных целей. Такой индикатор обычно используется на самолетах-истребителях и не реализован на гражданских транспортных средствах. Фиг. 1 показывает основные признаки индикатора, который используется главным образом для нацеливания на вражеский самолет в воздушном бою (справочная информация о фигуре: Шоу Р.Л., (1988) Истребительный бой: наука и искусство воздушного боя, общество с ограниченной ответственностью Патрика Стивенса). Когда цель вне досягаемости, индикатор просто обнаруживает летательный аппарат или собственный летательный аппарат/собственный корабль, на встречно-пересекающемся курсе с целью. Пилот может достигать требуемого направления подруливанием на точку 100, с тем чтобы помещать ее в центре индикатора.
Отображение на фиг. 1 по существу является проекцией переднего прямоугольника направлений, сканируемых датчиками собственного корабля, такими как радиолокатор. Таким образом, направление в трех измерениях становится точкой в двух измерениях на отображении. Линия 102 визирования (LOS) цели становится точкой, которая в этом случае представлена квадратом, чтобы отличаться от других символов, отображаемых пилоту. Окружность 104 допустимой погрешности управления (ASE) указывает диапазон возможных направлений запуска. То есть, когда точка 100 рулевого управления лежит внутри окружности 104, запуск может быть успешным. Отображение может содержать другую информацию, подобную времени и расстоянию до точки перехвата (не показана). Будет приниматься во внимание, что такое отображение также может действовать в качестве системы предупреждения опасного сближения, где пилот просто отруливает собственный корабль от цели.
Дополнительная система предшествующего уровня техники раскрыта в патенте США под № 6,970,104 на Кнетча и Смита. Здесь информация о полете используется для расчета зоны конфликта в пределах достижимой области собственного корабля. Отображение дает искусственное трехмерное представление (курс, скорость и абсолютную высоту) области конфликта пилоту. Отображение не показывает трехмерные положения относительно собственного корабля, а только отображает пространство маневра относительно зоны конфликта. То есть пилот должен опознавать область далеко от зоны конфликта, рассчитывать требуемый курс, скорость и абсолютную высоту по индикатору, затем маневрировать собственным кораблем в соответствии с этими расчетами.
Область конфликта Кнетча и Смита рассчитывается из допущений о том, как могли бы оба летательных аппарата поворачивать, набирать высоту, снижаться, ускоряться или замедляться. Таким образом, их зона конфликта скорее требует вызывающих сомнение допущений и изрядной обработки данных, чем неопровержимой информации и отображения непосредственно значащих данных.
Кроме того, пилот не информирован об уровне опасности, ассоциативно связанной с выбранным курсом, скоростью и абсолютной высотой. Пилот мог бы выводить собственный летательный аппарат в будущую конфликтную ситуацию, если зона конфликта в самом деле находится вне выбранного временного горизонта (на несколько минут вперед), а потому не отображается.
Поэтому есть необходимость предоставить отображение для транспортного средства, чтобы немедленно информировать пилота транспортного средства о потенциальной конфликтной ситуации и выдавать индикацию в отношении присущего уровня опасности для потенциальных маневров транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение стремится предоставить альтернативу известным системам и способу для распознавания требуемых маневров транспортного средства в конфликтных ситуациях.
В общих чертах в одном из аспектов настоящее изобретение относится к системе и способу распознавания маневров для транспортного средства в конфликтных ситуациях, вовлекающих транспортное средство и, по меньшей мере, один другой объект. Множество точек уклонения рассчитываются для условий транспортного средства и объекта, в которых транспортное средство будет уклоняться от соударения с, по меньшей мере, одним другим объектом посредством диапазона расстояний уклонения.
Точки уклонения отображаются из условия, чтобы множество точек уклонения, в которых транспортное средство уклонялось бы от столкновения посредством заданного расстояния уклонения, указывающего на заданную степень конфликта, было визуально отличимым от других точек уклонения, в которых транспортное средство уклонялось бы от столкновения посредством более больших расстояний уклонения, указывающих на меньшую степень конфликта. Результирующее отображение показывает изменяющиеся степени потенциального конфликта для представления в отображении направленного вида диапазона доступных маневров для транспортного средства в соответствии с изменяющимися степенями конфликта.
Один из вариантов осуществления визуально отличимых множеств точек уклонения характеризуется изометрическими отображениями и предпочтительно цветовой полосчатостью. В соответствии с еще одним вариантом осуществления изобретения отображением направленного вида является монохромное отображение или предпочтительно цветное отображение.
В общих чертах дополнительный аспект изобретения состоит в расчете других условий транспортного средства и объекта, в силу чего отображенный диапазон доступных маневров обновляется в соответствии с изменениями условий транспортного средства и другого объекта. В дополнительном предпочтительном варианте осуществления рассчитывается местоположение, по меньшей мере, одной точки столкновения, где транспортное средство будет соударяться с другим объектом для данных условий транспортного средства и объекта. По меньшей мере, одна точка столкновения затем отображается в отображении направленного вида.
В общих чертах еще один аспект изобретения относится к способу и системе для избежания столкновения в воздухе между двумя летательными аппаратами.
В дополнительном варианте осуществления изобретения описана навигационная система для судна.
В общих чертах в еще одном аспекте настоящее изобретение относится к способу для перехвата движущегося объекта.
В дополнительном варианте осуществления настоящее изобретение относится к логике, встроенной в машинно-читаемый носитель для реализации вышеупомянутых систем и способов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - система отображения предшествующего уровня техники, первично используемая в воздушном бою.
Фиг. 2a и 2b изображают потенциальную конфликтную ситуацию относительно двух летательных аппаратов.
Фиг. 2c и 2d показывают отображение в соответствии с настоящим изобретением потенциальной конфликтной ситуации на фиг. 2a и 2b.
Фиг. с 3a по 3b изображают конфликтную ситуацию по фиг. с 2a по 2d после того, как истекло определенное количество времени, и потенциальная конфликтная ситуация между двумя летательными аппаратами ближе.
Фиг. 3c и 3d показывают отображение в соответствии с настоящим изобретением потенциальной конфликтной ситуации на фиг. 3a и 3b.
Фиг. 4 - альтернативное отображение потенциальной конфликтной ситуации, изображенной на фиг. 3a и 3b.
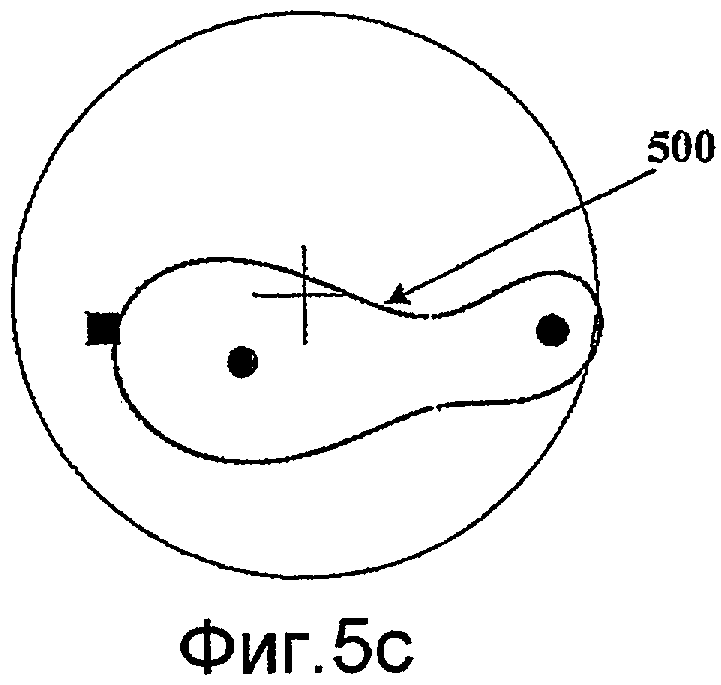
Фиг. с 5a по 5c изображает монохромное отображение в соответствии с вариантом осуществления настоящего изобретения.
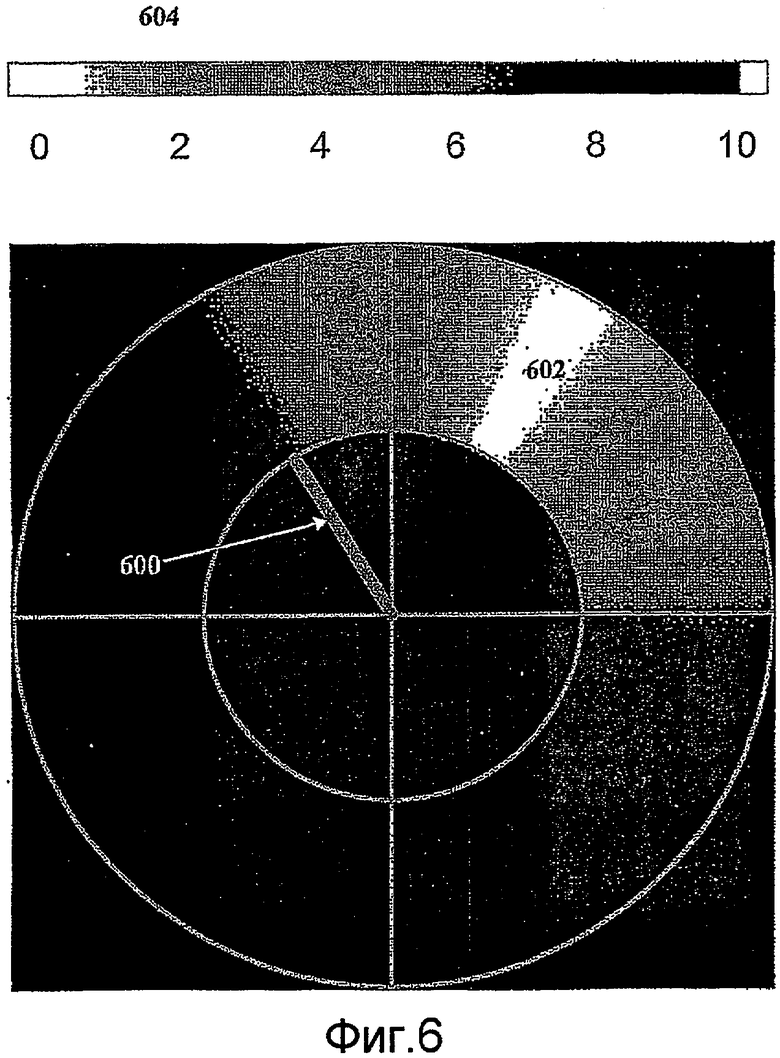
Фиг. 6 - альтернативное отображение в соответствии с вариантом осуществления настоящего изобретения.
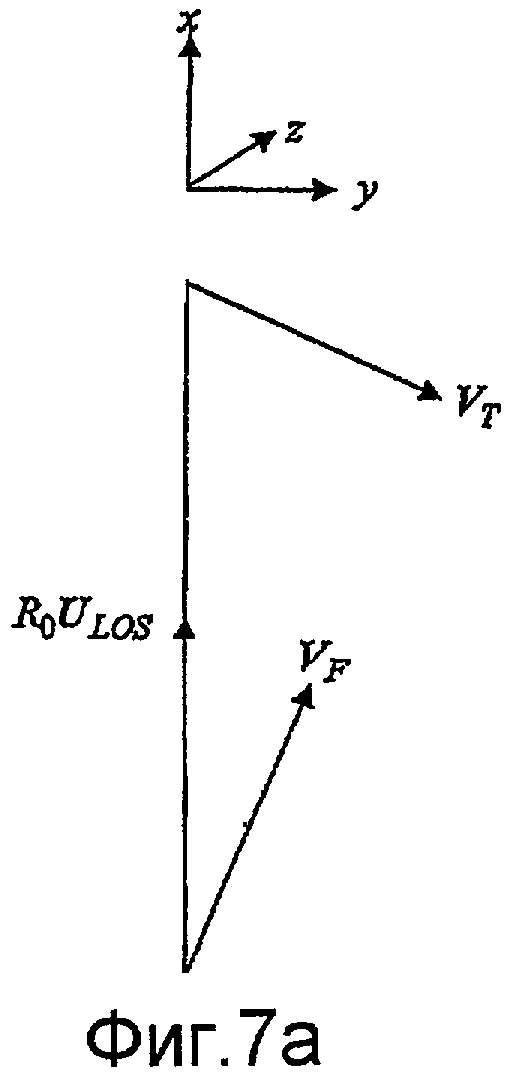
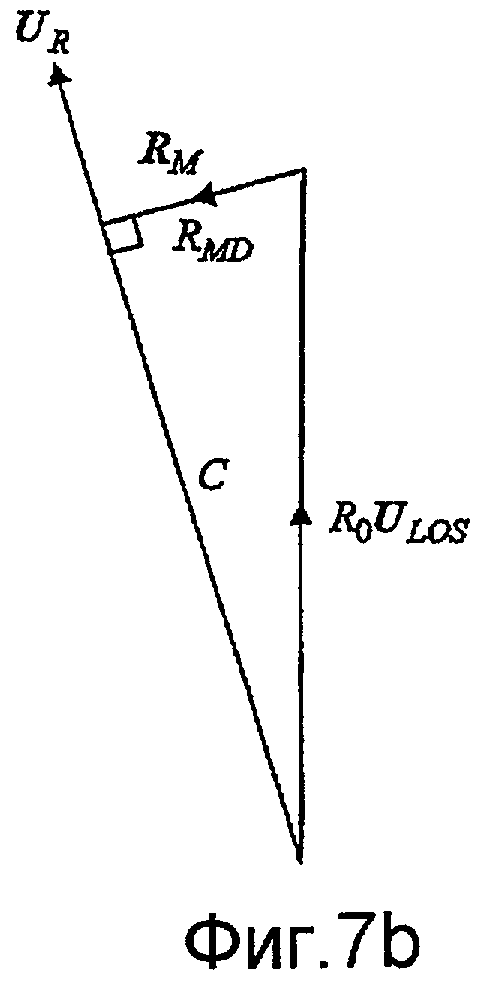
Фиг. 7a и 7b показывают геометрические векторы для расстояния уклонения в соответствии с настоящим изобретением.
Фиг. 8a и 8b показывают геометрические векторы столкновения в соответствии с настоящим изобретением.
Фиг. 9 показывает проекции траекторий столкновения и точек столкновения в соответствии с настоящим изобретением.
Фиг. с 10a по 10d показывает дополнительные проекции траекторий столкновения и точек столкновения, рассчитанных в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
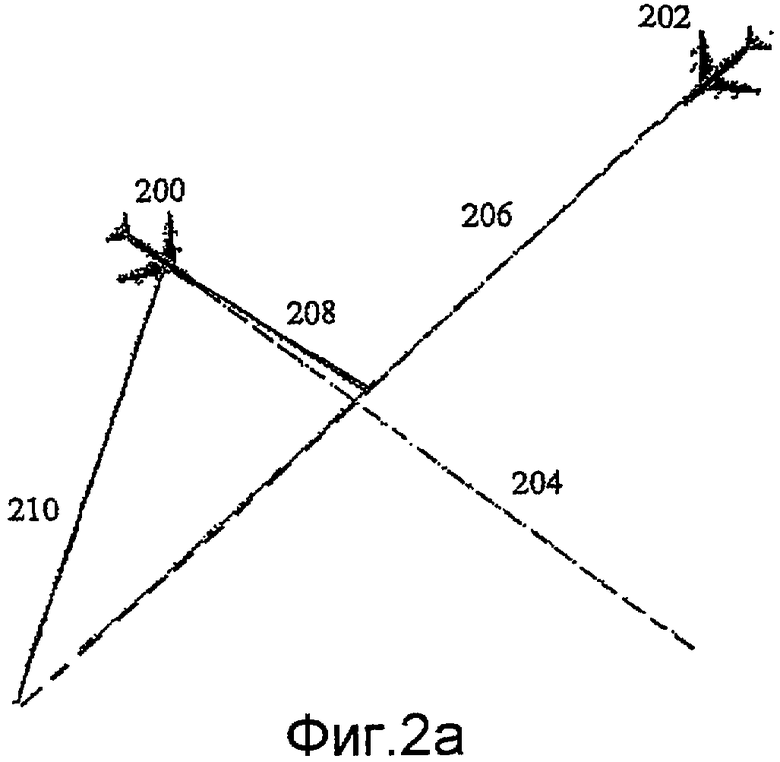
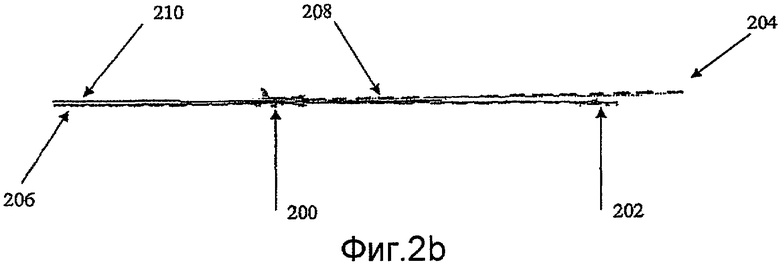
Далее, обращаясь к более подробному описанию настоящего изобретения, фиг. 2a и 2b изображают два летательных аппарата (собственный летательный аппарат 200, нарушителя 202), приближающиеся к потенциальной конфликтной ситуации. Фиг. 2c показывает предпочтительный бортовой индикатор в соответствии с настоящим вариантом осуществления, со ссылкой на ситуацию, показанную на фиг. 2a.
Примерная ситуация, показанная на фиг. 2a и 2b, имеет следующие параметры:
• скорость собственного летательного аппарата - 400 футов/с; и
• скорость нарушителя - 780 футов/с.
Оба летательных аппарата 200, 202 летят ровно, и собственный летательный аппарат 200 на 200 футов выше, чем нарушитель 202. Ниже есть другое воздушное движение (не показано), препятствующее снижению того или другого летательного аппарата.
Вид сверху на фиг. 2a показывает место действия в перспективе. Пунктирные линии 204 и 206 показывают направление текущего вектора скорости собственного летательного аппарата 200 и нарушителя 202, соответственно. Сплошные линии 208 и 210, исходящие из собственного летательного аппарата, показывают направления, которые приводили бы к конфликтной ситуации. Эти линии рассчитываются на той основе, что ни тот ни другой летательный аппарат не изменяет скорость, и нарушитель 202 продолжает движение со своим текущим вектором 206 скорости.
Есть две точки столкновения, так как нарушитель 202 является более быстрым, и два летательных аппарата продолжают сближаться. Поскольку положение летательного аппарата и векторы скорости меняются со временем, направления динамически изменяются. Если нарушитель 202 был более медленным, чем собственный летательный аппарат 200, было бы не более чем одно направление столкновения.
Фиг. 2b повторяет такую же ситуацию, как описанная выше, наблюдаемую со стороны.
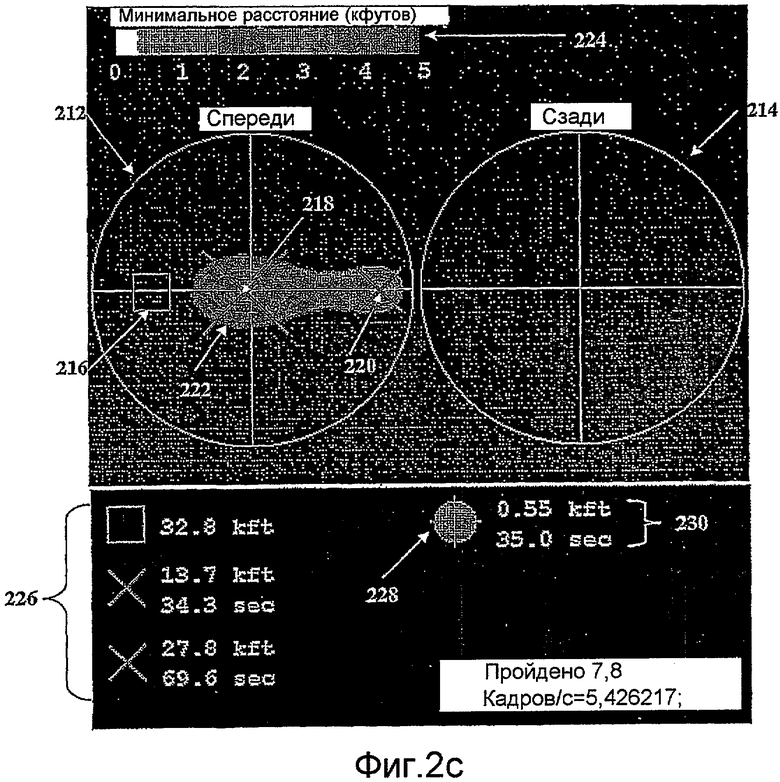
Фиг. 2c показывает пример предпочтительного отображения в соответствии с настоящим изобретением. Левый диск 212 является зенитальной проекцией передней полусферы направлений вокруг собственного летательного аппарата, где зенит находится прямо впереди. Правый диск 214 является задней полусферой, которая включена в состав, так как конфликтная ситуация могла бы возникать от более быстрого нарушителя позади собственного летательного аппарата.
Визирные нити выровнены с осями корпуса собственного летательного аппарата. То есть центр передней проекции соответствует продольной оси корпуса собственного летательного аппарата, или находится прямо впереди от точки наблюдения пилота. Центр задней проекции прямопротивоположен по направлению к задней стороне собственного летательного аппарата.
Равные радиальные углы в трех измерениях, относительно центральных направлений, изображены в качестве равных радиальных расстояний от центров проекций. Замкнутые кривые окружностей находятся на 90° от центров, и обе окружности представляют кольцо, центрированное по пилоту в плоскости под прямыми углами к продольной оси.
LOS, дающая направление нарушителя 202 от собственного летательного аппарата 200, предпочтительно показывается в качестве квадрата 216. Размер квадрата указывает расстояние до нарушителя, но его минимальный размер предпочтительно неизменен. Точки 218 и 220 столкновения предпочтительно представлены в качестве перекрестий. В подобном рассмотрении в отношении нарушителя размер точек 218, 220 столкновения указывает расстояние до потенциального столкновения. Ободок, окружающий точки столкновения, определяет зону 222 конфликта. Колебания затенения внутри зоны конфликта являются изображением расстояния уклонения или будущего минимального расстояния между собственным летательным аппаратом и нарушителем для всех предположительных направлений собственного летательного аппарата. То есть изменения затенения определяют степени конфликта. Предпочтительно затенение является уровнем цветов, чтобы предоставлять пилоту возможность незамедлительно ассоциативно связывать расстояние уклонения с уровнем опасности.
Чтобы дополнительно разъяснить, каким образом рассчитываются изменяющиеся степени конфликта, выбрано предположительное направление для собственного летательного аппарата. То есть визирные нити умозрительно устанавливаются навстречу требуемому направлению, с существующей скоростью. Это указывается ссылкой как точка уклонения. Со ссылкой на фиг. 2c, если нарушитель будет продолжать движение со своим текущим вектором скорости, предположительное расстояние уклонения может рассчитываться (обсуждено ниже) относительно точки уклонения.
Предпочтительно цвет выбирается из легенды 224, подходящей для этого расстояния уклонения, и пиксель экрана окрашивается соответственным образом в такой точке уклонения. Надлежащее затенение может применяться, чтобы указывать степень конфликта, если цветное отображение недоступно. Если расстояние уклонения рассчитано находящимся вне диапазона легенды 224 - которое составляет 5 килофутов на фиг. 2c - то пиксель или точка уклонения остаются черными. Продолжая с этим алгоритмом, расстояние уклонения может рассчитываться для континуума предположительных направлений собственного летательного аппарата, имея следствием отображенную степень конфликта.
Изменяющаяся степень конфликта внутри зоны конфликта предоставляет пилоту возможность немедленно оценивать уровень опасности, ассоциативно связанной с любым курсом, который мог бы выдерживаться. Поэтому, если намерение состоит в том, чтобы избегать точек столкновения, пилот может управлять транспортным средством, с тем чтобы гарантировать достаточное расстояние уклонения (выведенное непосредственно по цвету/затенению, ассоциативно связанному с такой точкой уклонения). Если намерение состоит в том, чтобы перехватить нарушителя, пилот может направлять транспортное средство к точке столкновения, оценивая опасность конфликта, чтобы оказывать содействие в зависимости от направления для перехвата.
Предпочтительно отображение включает в себя информацию 226 данных для содействия пилоту. Предпочтительный вариант осуществления изобретения, как показано на фиг. 2c, дополнительно включает в себя, но не в качестве ограничения, текущее расстояние нарушителя возле его символа, и расстояние и время до точек столкновения. Прямая индикация степени конфликта также предпочтительно показывается в отдельном изображении 228. Время и расстояние до максимального сближения 230 также может показываться.
Хотя не показана, дополнительная информация данных предпочтительно включает в себя визуальные индикации, такие как стрелки, изображающие положения перекрестия (то есть выше, ниже, слева или справа) собственного летательного аппарата при пролете мимо нарушителя. В дополнение численное значение H M вертикальной составляющей, представляющей расстояние уклонения, предпочтительно включено в состав, когда положением перекрестия является над или под нарушителем. К тому же числовое значение W M горизонтальной составляющей расстояния уклонения может быть включено в состав, когда положением перекрестия является слева или справа от нарушителя. Следовательно, направления стрелок и значение расстояния уклонения указывает, как собственный летательный аппарат должен подруливать, чтобы изменять степень конфликта, в зависимости от того должен ли избегаться конфликт или должен ли перехватываться нарушитель.
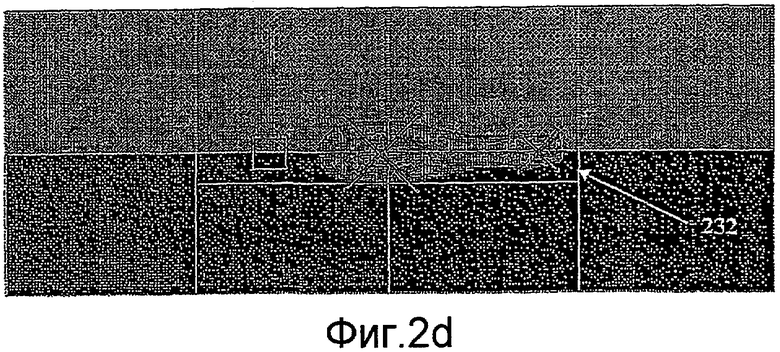
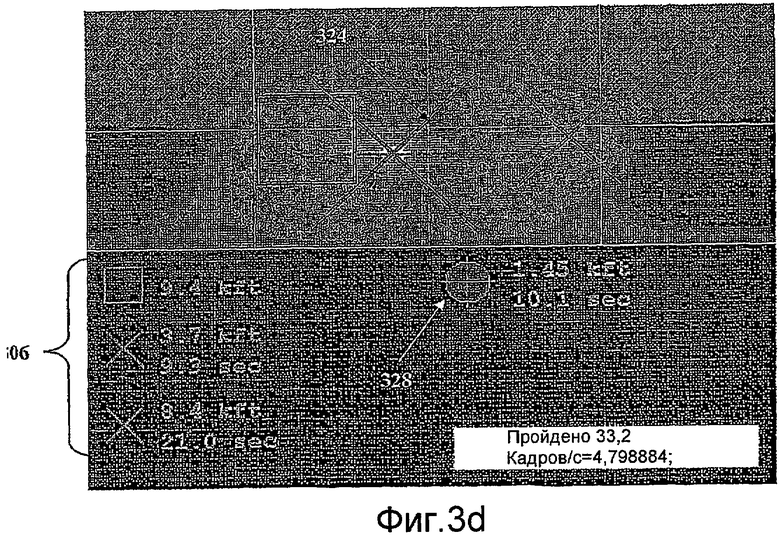
Фиг. 2d показывает еще один вариант осуществления отображения и изображает проекцию Меркатора полной сферы. Летная ситуация, показанная здесь, является прежней ситуацией, показанной на фиг. 2c. В рассмотрении, подобном фиг. 2c, оси отображения являются осями собственного летательного аппарата. Равные углы азимута изображены в качестве равных горизонтальных расстояний. Равные углы возвышения изображены в качестве равных вертикальных расстояний. Точка точно над собственным летательным аппаратом, относительно его осей, отображается в верхнюю грань, так что направления в этой окрестности сильно увеличены и искажены. Подобным образом, точка точно под собственным летательным аппаратом отображается в нижнюю грань. Эта проекция имеет качество неразрывности передней и задней проекций, за исключением вертикальной вырезки позади собственного летательного аппарата.
Это отображение на фиг. 2d включает в себя проекцию горизонта, которая в этот момент является плоской и ровной. Точки над горизонтом предпочтительно изображаются разным цветом/затенением для оказания помощи пилоту. В то время как собственный летательный аппарат задирает нос, кажется, что горизонт опускается возле центра и поднимается возле левой и правой граней (как видно на фиг. 3d). В то время как собственный летательный аппарат закладывает вираж на разворот, он кренится и принимает синусоидальную форму. Горизонт (не показан) мог бы добавляться в двойную проекцию полусферы на фиг. 2c, если требуется.
Внутреннее окно 232 на фиг. 2d приближается к типичному визуальному полю зрения пилота. То есть от -90 до +90° по горизонтали и от -20 до +20° по вертикали относительно поперечной и продольной осей летательного аппарата, соответственно.
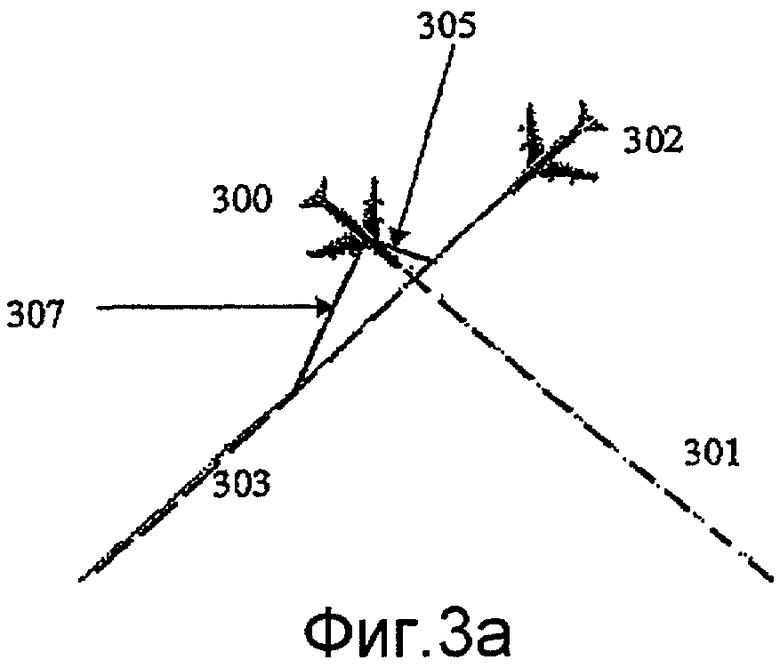
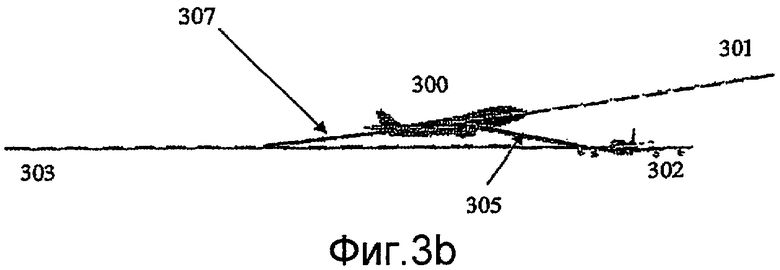
Фиг. 3a - дополнительный вид сверху ситуации, описанной выше относительно фиг. 2, после того, как истекло определенное количество времени и потенциальная конфликтная ситуация между собственным летательным аппаратом 300 и нарушителем 302 является более близкой. В рассмотрении, подобном 2a и 2b, пунктирные линии 301 и 303 показывают направление текущего вектора скорости собственного летательного аппарата 300 и нарушителя 302, соответственно. Линии 305 и 307, исходящие из собственного летательного аппарата, показывают направления, которые приводили бы к конфликту. Как может быть видно на фиг. 3b, собственный летательный аппарат 300 предпринял маневр уклонения для набора высоты.
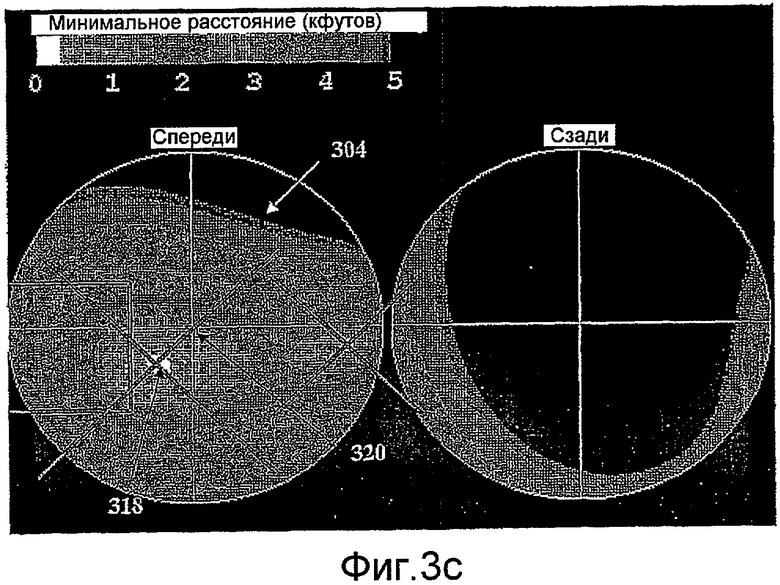
Размер зоны 304 конфликта на отображении на фиг. 3c, увеличился в размере по сравнению с фиг. 2c для создания большего зрительного образа опасности, который уместен. Это также передает информацию, что направления безопасного управления собственного летательного аппарата являются более экстремальными и требуют неотложного действия.
Альтернативное отображение показано на фиг. 3d, изображающей проекцию Меркатора полной сферы. В этом варианте осуществления информация 306 данных показана в нижней части отображения, предоставляющей точную информацию пилоту транспортного средства касательно точки потенциального столкновения.
По мере того как ситуация продолжается, собственный летательный аппарат продолжает набирать высоту, чтобы избежать точки столкновения. Специалист будет принимать во внимание, что визирные нити зенитальной проекции на фиг. 3c и проекция Меркатора, показанная на фиг. 3d, подобным образом перемещаются в безопасную область в зоне конфликта, показанной цветом или затенением, указывающими приемлемую степень конфликта.
Поэтому, чтобы подвести итог ситуации на фиг. 2a-d и фиг. 3 a-d, собственный летательный аппарат 200 распознает основную точку 218 столкновения почти прямо впереди. Это указывается ярким цветом/затенением на текущем курсе собственного летательного аппарата и в блоке информации данных под 228.
Незначительные отклонения в направлении могли бы привести к конфликту. Поэтому собственный летательный аппарат может поворачивать направо, каковое поддерживает отображение в соответствии с приемлемой степенью конфликта. В тех случаях, когда нарушитель 202 должен сохранять свой курс, есть риск от второй точки 220 столкновения до правой стороны собственного летательного аппарата на 70°.
Собственный летательный аппарат решает увеличить прогнозируемое вертикальное расстояние, инициируя набор высоты, как показано на фиг. 3a-3c. На протяжении 10 секунд собственный летательный аппарат 300 поворачивается вверх на угол набора высоты в 5°, а затем удерживает этот угол. Собственный летательный аппарат 300 предоставляет возможность небольшого поворота направо на 0,15° в секунду. Нарушитель 302 не меняет направление, так как он не осведомлен о присутствии собственного летательного аппарата 300 в этом случае. Основная точка 318 столкновения на отображении отклоняется вниз и влево, как требуется. Проецируемые измерения расстояния теперь будут увеличиваться, как показано в блоке 306 информации данных. Степень конфликта указывается цветом/затенением на текущем направлении собственного летательного аппарата (визирные нити 320 на фиг. 3c и визирные нити 324 на фиг. 3d) и в блоке информации данных под 328.
Будет приниматься во внимание, что в некоторых обстоятельствах, таких как удаляющийся нарушитель, нет никакой точки столкновения. Однако зона конфликта и степень конфликта могут присутствовать по-прежнему при отсутствии некоторых внутренних затенений/цветов.
Система по настоящему изобретению может отображать многочисленные зоны конфликта, относящиеся к более чем одному нарушителю. Дополнительные зоны конфликта могут вызываться наличием непогоды или физических особенностей местности. Требуемая информация рассчитывается, как обсуждено ниже, и накладывается на отображение со своими символами (например, перекрестиями и квадратами), зонами конфликта и ассоциативно связанными степенями конфликта. В тех случаях, когда пиксель отображения имел бы разные цвета или затенения для двух нарушителей (то есть степени конфликта меняются для одного и того же положения в зоне конфликта), ему предпочтительно назначается цвет/затенение меньшего расстояния уклонения.
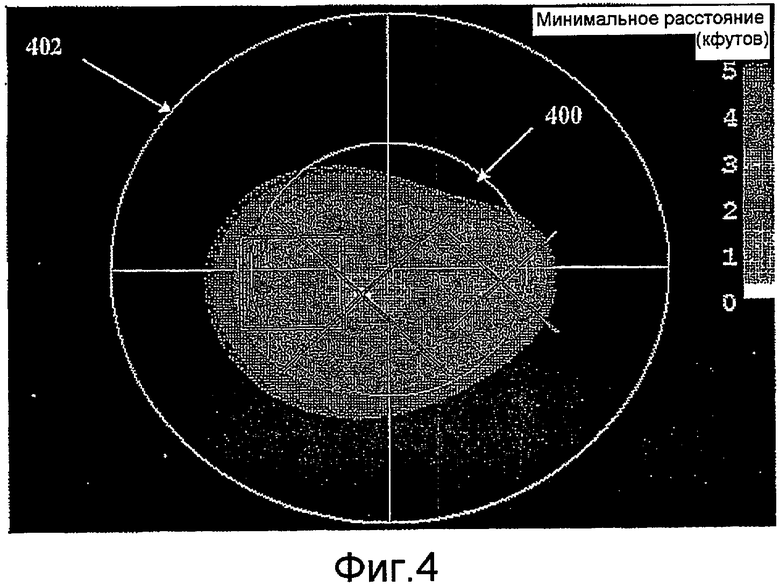
Дополнительный вариант осуществления изобретения показан на фиг. 4 летной ситуации, обсужденной выше, в соответствии с фиг. 3a-3d. Это зенитальная проекция полной сферы направлений вокруг собственного летательного аппарата. Внутренний диск 400 идентичен зенитальной проекции передней полусферы на фиг. 3c, так что равные радиальные углы изображаются в качестве равных радиальных расстояний. Однако в этой проекции радиальные углы простираются до 180°. Точка точно позади собственного летательного аппарата отображается на наружную окружность 402, так что направления в этой окрестности сильно увеличены и искажены.
Горизонт (не показан) в этом изображении формировал бы замкнутую кривую, которая могла бы быть затруднительной для интерпретации. Однако он обладает качеством непрерывности передней и задней полусфер. Предпочтительно отображения по настоящему изобретению могут переставляться, как требуется оператором транспортного средства.
Предпочтительно диапазон углов в любой из проекций мог бы ограничиваться, для того чтобы показывать малые изменения угла. Дополнительно степень конфликта может меняться в соответствии с требованиями пилота или согласно алгоритму. Это преимущественно предоставляет возможность более высокого разрешения расстояний, когда летательные аппараты угрожающе близки, и нужно, чтобы точнее маневрировать.
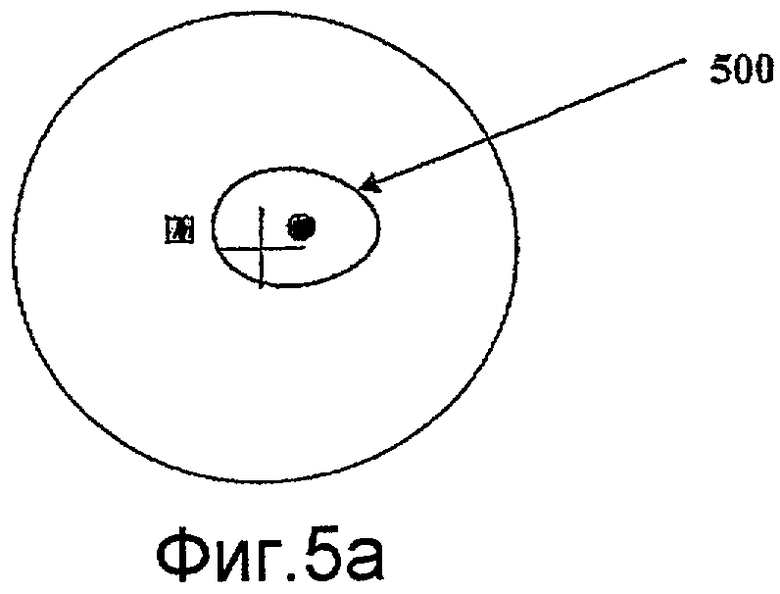
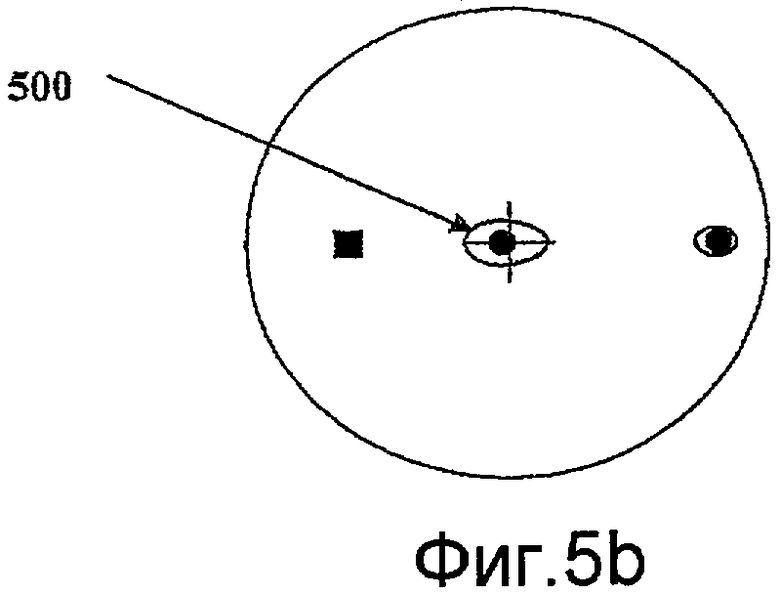
Специалистами в данной области техники будет приниматься во внимание, что монохромное отображение может использоваться вместо цветного изображения или изменяющегося затененного изображения для представления степени конфликта. Предпочтительно монохромное отображение, такое как варианты, показанные на фиг. 5a, 5b и 5c, будет содержать одну или более контурных линий 500 для обеспечения прямой индикации степени конфликта. Каждый контур на отображении топографического типа соответствует постоянному расстоянию уклонения, а отсюда постоянной степени конфликта. Производные этих отображений особенно полезны для включения в индикацию на лобовом стекле (HUD).
Фиг. 6 изображает дополнительную схему в соответствии с вариантом осуществления настоящего изобретения для отображения на приборном щитке капитанского мостика корабля. Отображение используется для прямого указания степени конфликта. То есть уровень опасности столкновения с другими судами или другими препятствиями, такими как физические особенности местности.
Отображение является двумерным видом сверху. Визирные нити выровнены с осями собственного корабля, так что прямо впереди лежащее относительно судна находится на 12 часов на отображении. Внутренняя стрелка 600, показанная в этом случае приблизительно на 11 часах, является текущей LOS нарушителя. Нарушитель в текущий момент находится на траектории, которая пересекается впереди собственного корабля.
Цветные или затененные полосы 602, показанные во внешнем диске на отображении, указывают изменяющиеся степени конфликта, ассоциативно связанного с расстоянием уклонения для каждой предположительной скорости собственного корабля.
В зависимости от непосредственного окружения судна может выбираться уместная шкала для степени конфликта. Например, судно в открытом море может иметь большую шкалу, чем требуемая для портового патрульного судна. Ассоциативно связанная легенда 604 предпочтительно дает числовое значение расстояния уклонения относительно каждой степени конфликта. Расстояния уклонения могут измеряться от центральной точки каждого корабля или могут раскладываться размеры и ориентации судна.
Отображение на фиг. 6 показывает, что на своем текущем курсе собственный корабль будет уклоняться от нарушителя приблизительно на 300 единиц. Опасным направлением для собственного корабля является 1 час, ведущим к точке столкновения.
Если точка столкновения является неподвижным объектом (например, местностью), степень конфликта по-прежнему отображалась бы некоторым образом в соответствии с настоящим изобретением. Специалисты в данной области техники приняли бы во внимание, что внутренней стрелке необязательно присутствовать в этом случае для указания LOS для неподвижной потенциальной точки столкновения.
Отображение предпочтительно дополнялось бы числовыми значениями (не показаны), указывающими время и расстояние до точек столкновения. Дополнительные нарушители указывались бы другой стрелкой LOS и другим набором цветных/затененных полос. Стрелка LOS могла бы быть замещена символом или другим очевидным вариантом на периметре.
Специалистами в данной области техники будет приниматься во внимание, что такие отображения, описанные выше в качестве примера варианта осуществления настоящего изобретения, не ограничены расположенными на транспортном средстве, испытывающем потенциальный конфликт. Например, система и способ настоящего изобретения могут быть реализованы в системе управления воздушным движением.
Далее, обратимся к предпочтительному способу для расчета степени конфликта. Следующая система условных обозначений будет использоваться на всем протяжении расчетов, обсужденных ниже.
V F = вектор скорости собственного летательного аппарата
V F = скорость собственного летательного аппарата
V T = вектор скорости нарушителя
V T = скорость нарушителя
V R = вектор скорости собственного летательного аппарата относительно нарушителя
U R = единичный вектор, параллельный V R
U L0S = единичный вектор из собственного летательного аппарата на нарушителя
R 0 = текущее расстояние в трех измерениях между собственным летательным аппаратом и нарушителем
R MD = расстояние уклонения в трех измерениях между собственным летательным аппаратом и нарушителем
x = координата, параллельная U L0S
y = координата, перпендикулярная U L0S в плоскости U L0S и V T
z = координата, перпендикулярная x и y
V Rx = составляющая x у V R; подобно V Ry и V Rz
V Tx = составляющая x у V T; подобно V Ty и V Tz
 = предположительный вектор скорости собственного летательного аппарата
= предположительный вектор скорости собственного летательного аппарата
X = составляющая x у ; подобно Y и Z
θ = полуугол конуса
β = tan θ
h = расстояние точки от вершины конуса в направлении x
h +(ϕ) = решение уравнения (12); h -(ϕ) - еще одно решение
ϕ = полярный угол точки вокруг оси конуса
CDTI = бортовой индикатор для информации о движении
LOS = линия визирования
Значения для расчетов, приведенных ниже, могут приниматься известными способами, такими как радиопередача по линии передачи данных. Предпочтительно эти значения рассчитываются с точностью и погрешностью принятых координат высокого разрешения из глобальной системы определения местоположения (GPS).
Со ссылкой на геометрию столкновения на фиг. 7a, собственный летательный аппарат имеет трехмерный вектор V F скорости, нарушитель имеет трехмерный вектор V T скорости, их текущим трехмерным расстоянием является R 0, и LOS на нарушителя задана единичным вектором U LOS.
Здесь, F предназначено для первого лица, а T предназначено для нарушителя либо угрозы или движения. С точки зрения или системы координат нарушителя собственный летательный аппарат появляется, чтобы двигаться со скоростью V R =V F - V T в направлении с единичным вектором U R = V R /|V R |, если V F ≠ V T .
Фиг. 7b показывает, что расстояние уклонения является более коротким путем от нарушителя до линии через собственный летательный аппарат в направлении U R. Кратчайшим путем является перпендикуляр к линии. Составляющей вектора R 0 U LOS относительного положения вдоль U R, является C = R 0 U LOS · U R, где точка обозначает скалярное произведение. Если V F = V T, то C = 0. Отсюда вектором от нарушителя до собственного летательного аппарата с максимальным приближением был бы

Теорема Пифагора дает расстояние уклонения в качестве

Эта формула используется для вычисления расстояний уклонения для всех предположительных направлений собственного летательного аппарата (точек уклонения), имея следствием степень конфликта, показываемую в качестве цветных или затененных областей на фиг. с 2 по 6. Для текущего направления собственного летательного аппарата также рассчитываются составляющая H M у R M вдоль направленной вверх оси собственного летательного аппарата и составляющая W M вдоль его правого крыла. Они показывают, как далеко собственный летательный аппарат будет проходить выше и по правую сторону собственного летательного аппарата от нарушителя при максимальном сближении, и их значения предпочтительно выдаются в отображении информационных данных.
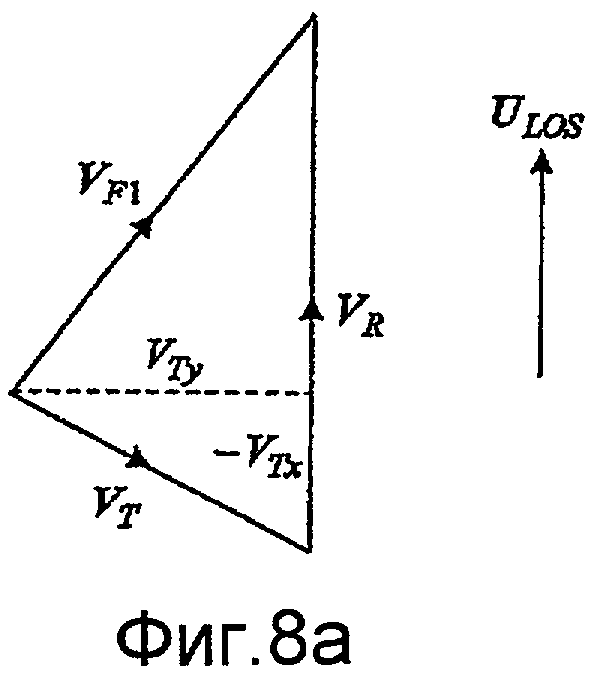
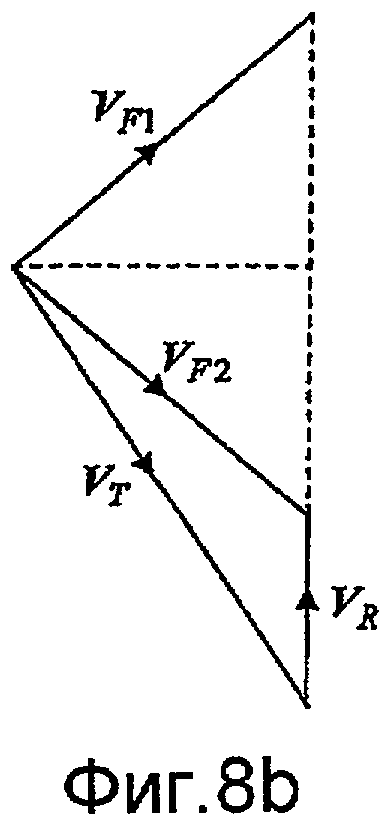
Точки столкновения соответствуют R MD = 0, каковое происходит, когда U R = U L0S, как показывает (2), так что U L0S, V F и V T были бы лежащими в одной плоскости. Используются ортогональные координаты (x, y, z), в которых ось x лежит вдоль U LOS, а ось y лежит в плоскости U L0S и V T, так что V T содержит положительную y-составляющую V Tу. Ось z определена правилом правой руки. Треугольник столкновения, показанный на фиг. 8a, показывает случай, где V F >V T. Если V F <V Ty, точки столкновения нет. В ином случае теорема Пифагора дает стандартную формулу:

и вектором скорости собственного летательного аппарата был бы

Направление этого вектора проецируется на отображения в качестве перекрестия. Фиг. 8b иллюстрирует случай, где V F < V T, и есть два направления столкновения. Что касается второго, плюс перед корнем квадратным в (3) становится минусом. Это дает второй вектор V F2 скорости собственного летательного аппарата, чье направление проецируется на отображение в качестве второго перекрестия. Его параметры предпочтительно выдаются против нижнего перекрестия в секции информационных данных отображения. Для текущего вектора скорости собственного летательного аппарата и для направлений столкновения времена C/|V R | для достижения минимального расстояния показаны в блоке данных.
Возвращаясь к фиг. 5a, показан вариант линейного графика зенитального отображения, где зона конфликта замкнутой кривой соответствует расстоянию уклонения в 2000 футов. Точка столкновения теперь представлена точкой вместо перекрестия. LOS показана в качестве сплошного квадрата, а визирные нити сокращены. В целях легкости описания оба летательных аппарата летят ровно и собственный летательный аппарат имеет скорость в 500 футов/с. Нарушитель имеет скорость в 400 футов/с, находится на расстоянии в 6000 футов и на 30° левее и 7° ниже собственного летательного аппарата. Нарушитель пролетает мимо перед собственным летательным аппаратом под 90° к траектории собственного летательного аппарата. Точка столкновения могла бы быть достигнута за 10,7 секунд. Однако фиг. 5a указывает, что они будут уклоняться посредством приблизительно 1200 футов.
Компьютерная программа может получать контур в 2000 футов, пиксель за пикселем, но это является дорогостоящим по вычислениям и не формирует гладкую кривую. Взамен равенство для контура получается обращением к геометрии столкновения на фиг. 8a. Равенство (2) может быть записано в виде

которое может быть выражен в составляющих как

Предположительной скоростью собственного летательного аппарата является
=(X, Y, Z), где составляющие X, Y, Z являются переменными, которые будут определять контур. Следовательно,

так как V T не имеет составляющей z. Теперь (6) сокращается до

где

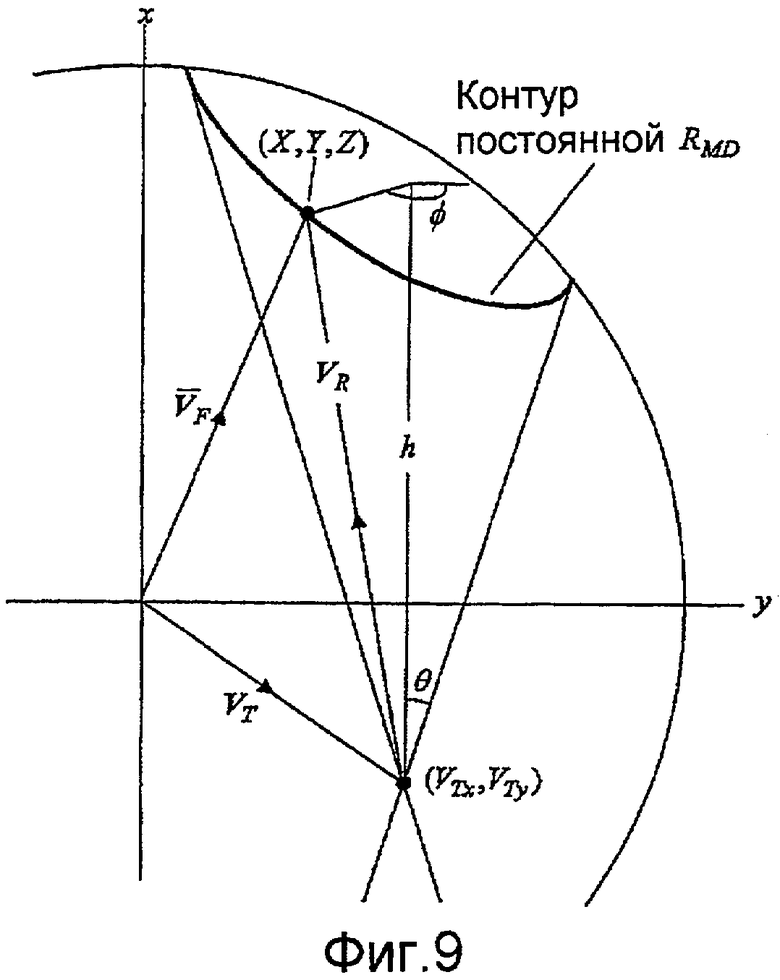
Равенство (8) определяет конус с вершиной V T, осью вдоль оси x и полууглом θ = arctan β. Фиг. 9 показывает один из примеров. С напоминанием, что фактическая текущая скорость V F=| V F| собственного летательного аппарата допускается для всех предположительных направлений собственного летательного аппарата, в таком случае

Это определяет поверхность сферы радиуса V
F, центрированной в начале координат, как проиллюстрировано на фиг. 9. Система уравнений (8) и (10) определяет две замкнутых кривых, где конус пересекает сферу. Предположительные скорости
=(X, Y, Z) в таком случае лежат на кривых на фиг. 9. К тому же точки столкновения лежат на пересечении оси конуса с поверхностью сферы, так как β = 0, когда R
MD = 0.
V
F имеют направления, заданные единичным вектором  =
/V
F. Чтобы начертить проекции на фиг. 9, (8) записано в параметрической форме
=
/V
F. Чтобы начертить проекции на фиг. 9, (8) записано в параметрической форме

где h - вертикальное расстояние над вершиной конуса, а ϕ - полярный угол вокруг оси конуса на фиг. 9. Подстановка этого в (10) дает квадратное уравнение относительно h

Два решения обозначены h
+(ϕ) и h
-(ϕ). Когда h
+(ϕ) подставлено в (11), уравнение верхней кривой на фиг. 9 выражается в показателях единственного параметра ϕ. Кривая затем может формироваться из (11) пошаговым перемещением по тесно расположенным значениям ϕ в диапазоне (0, 2π). Направления затем зенитально проецируются, чтобы создать отображение на фиг. 5a.
Нижняя кривая на фиг. 9 могла бы быть получена из h -(ϕ) подобным образом. Однако нижняя половина конуса соответствует минимальному расстоянию, возникающему в прошлом, поэтому она не является физически значимой.
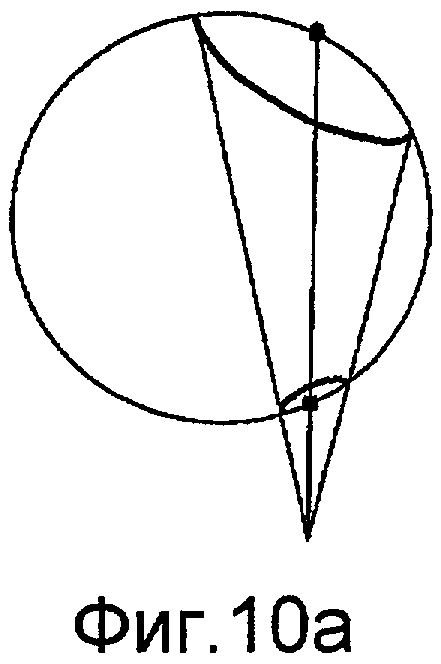
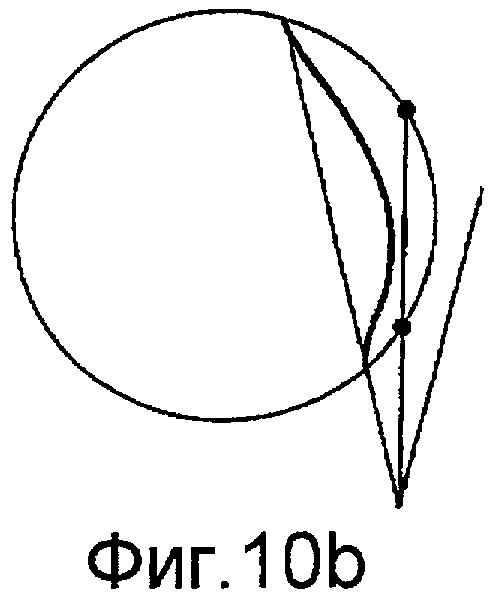
Принимая во внимание сценарий, который изображен на фиг. 10a, однако обе кривые лежат в верхней половине конуса и имеют место в будущем. Результирующая проекция дает два контура, как показано на фиг. 5c.
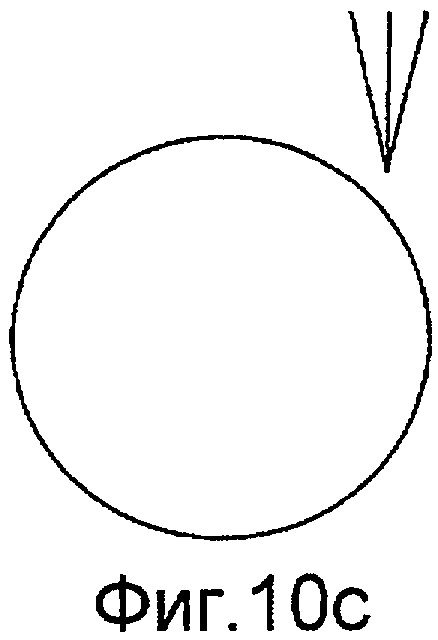
Возможными ситуациями являются следующие. Если собственный летательный аппарат быстрее (V F ≥ V T), есть ровно одна точка столкновения. Это следует, так как вершина конуса находится внутри сферы на фиг. 9. Если собственный летательный аппарат медленнее (V F < V T), то вершина находится вне сферы и есть два основных случая:
(i). Если V Tx > 0, точек столкновения нет, так как вершина конуса лежит над сферой (смотрите фиг. 10c). Если V Tx < 0 и V Ty > V F, точек столкновения нет, так как вершина конуса лежит сбоку от сферы (смотрите фиг. 10d). В обоих случаях, если V T достаточно велика, нет ни той ни другой зоны конфликта (контура).
(ii). Если V Tx < 0 и V Ty < V F, есть две точки конфликта, так как вершина конуса лежит ниже сферы (смотрите фиг. 10a и 10b). Всегда есть, по меньшей мере, один контур. Одиночный контур, который мог бы быть имеющим форму гантели, может охватывать обе точки столкновения (смотрите фиг. 10b), давая в результате зону конфликта. В качестве альтернативы каждый из двух отдельных контуров может содержать одну точку столкновения (смотрите фиг. 10a). За исключением V F << V T, одна точка столкновения является гораздо более близкой и имеет гораздо больший контур. Математические условия для разных типов контуров могут быть выведены из этих фигур.
В качестве примера фиг. 5b показывает контуры на фиг. 2, тогда как фиг. 5c показывает контуры на фиг. 3 или 4. Фиг. 5c - пример, подобный фиг. 10b. Эти отображения линейного графика могли бы использоваться для разрешения конфликта, как описано выше, хотя визуальная информация менее полна. Предпочтительно многие расстояния уклонения рассчитываются для предоставления полезной индикации степени конфликта.
Будет приниматься во внимание, что вертикальные размеры летательного аппарата относительно малы и вертикальные маневры требуются для летательного аппарата операционно. Поэтому могло бы быть более удобным иметь более мелкую шкалу в вертикальном направлении. Это возможно дало бы в результате вертикальную цветовую легенду и горизонтальную цветовую легенду. Горизонтальное расстояние уклонения, скажем, a появляется на таком же контуре (том же цвете/затенении), как вертикальное расстояние уклонения, скажем, b, где отношение b/a является постоянным числом, меньшим чем единица, на основании размеров и маневренности транспортного средства. Для угла ϕ относительно горизонтали в стереоскопическом графике пригодным значением расстояния уклонения является

Это расстояние уклонения может быть найдено в качестве точки на отображении, по радиусу под углом ϕ, и контура, начерченного через такую точку, или окрашивает/затеняет пиксель ассоциативно связанным цветом/затенением. Результирующее отображение в таком случае дает более высокое разрешение вертикальных расстояний уклонения, предоставляющее возможность более точного измерения степени конфликта.
Специалистами в данной области техники будет приниматься во внимание, что вышеприведенные расчеты не ограничены условиями транспортного средства в одной плоскости (то есть постоянным направлением). Дополнительное рассогласование координатных точек может давать в результате предположительный расчет виража (поворота) вторгающегося транспортного средства или изменяющейся скорости и вероятной степени конфликта, которую навлек бы такой маневр на собственный летательный аппарат. Например, предположительный конфликт мог бы рассчитываться за минимальное время, чтобы информировать пилота собственного летательного аппарата о возможном надвигающемся конфликте, если нарушитель поворачивает опасным образом.
Конечно, может быть понято, что тогда как вышеприведенное было дано в качестве иллюстративного примера этого изобретения, все такие и другие модификации и варианты в отношении него, как было бы очевидно специалистам в данной области техники, считаются подпадающими под широкий объем и границы этого изобретения, как изложено в следующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ УКЛОНЕНИЯ ОТ СТОЛКНОВЕНИЙ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2343528C1 |
| СПОСОБ ИНДИКАЦИИ УГРОЗ И КОМАНД ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2008 |
|
RU2373116C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ СО ВСТРОЕННОЙ СИСТЕМОЙ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИЯХ | 2012 |
|
RU2597047C2 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ВОЗДУШНЫМ СУДНОМ И БЕСПИЛОТНЫЙ АППАРАТ, ОСНАЩЁННЫЙ СИСТЕМОЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2013 |
|
RU2581455C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| Способ и устройство для управления движением на аэродроме | 2015 |
|
RU2634502C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |
| Способ предупреждения столкновения беспилотного аппарата с воздушным судном | 2023 |
|
RU2811621C1 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |

Группа изобретений относится к технике распознавания маневров для транспортного средства в конфликтных ситуациях. Множество точек уклонения рассчитываются для условий транспортного средства, а также объекта, в которых транспортное средство будет уклоняться от соударения с, по меньшей мере, одним другим объектом посредством диапазона расстояний уклонения. Точки уклонения отображаются из условия, чтобы множество точек уклонения, в которых транспортное средство уклонялось бы от соударения посредством заданного расстояния уклонения, указывающего на заданную степень конфликта, было визуально отличимым от других точек уклонения, в которых транспортное средство уклонялось бы от соударения посредством более больших расстояний уклонения, указывающих на меньшую степень конфликта. Результирующее отображение показывает изменяющиеся степени потенциального конфликта для представления в отображении направленного вида диапазона доступных маневров для транспортного средства в соответствии с изменяющимися степенями конфликта. Группа изобретений обеспечивает предоставление отображения для транспортного средства, позволяющее немедленно информировать пилота о потенциальной конфликтной ситуации и выдавать индикацию в отношении присущего уровня опасности для потенциальных маневров транспортного средства. 5 н. и 26 з.п. ф-лы, 23 ил.
1. Способ распознавания маневров для транспортного средства в конфликтных ситуациях, вовлекающих транспортное средство и, по меньшей мере, один другой объект, способ содержит то, что:
для заданных условий транспортного средства и объекта рассчитывают множество точек уклонения, в которых транспортное средство будет уклоняться от соударения с, по меньшей мере, одним другим объектом посредством диапазона расстояний уклонения;
отображают точки уклонения из условия, чтобы множество точек уклонения, в которых транспортное средство уклонялось бы от столкновения посредством заданного расстояния уклонения, указывающего на заданную степень конфликта, было визуально отличимым от других точек уклонения, в которых транспортное средство уклонялось бы от столкновения посредством более больших расстояний уклонения, указывающих на меньшую степень конфликта;
при этом отображение указывает изменяющиеся степени потенциального конфликта, чтобы тем самым представлять в отображении направленного вида диапазон доступных маневров для транспортного средства в соответствии с изменяющимися степенями конфликта.
2. Способ по п.1, в котором визуально отличимые множества точек уклонения характеризуются изометрическими отображениями.
3. Способ по п.2, в котором визуально отличимые множества точек уклонения характеризуются цветовой полосчатостью.
4. Способ по любому из предыдущих пунктов, в котором множество точек уклонения рассчитывается по координатам высокого разрешения.
5. Способ по п.1, дополнительно содержит то, что:
повторяют этапы, определенные в п.1, для других условий транспортного средства и объекта, в силу чего отображенный диапазон доступных маневров обновляется в соответствии с изменениями в отношении условий транспортного средства и другого объекта.
6. Способ по п.5, в котором отображение направленного вида является монохромным отображением.
7. Способ по п.5, в котором отображение направленного вида является цветным отображением.
8. Способ по п.1, дополнительно содержит то, что:
для заданных условий транспортного средства и объекта рассчитывают местоположение, по меньшей мере, одной точки столкновения, в которой транспортное средство будет соударяться с другим объектом, и
отображают, по меньшей мере, одну точку столкновения в отображении направленного вида.
9. Система для распознавания маневров для транспортного средства в конфликтных ситуациях, вовлекающих транспортное средство и, по меньшей мере, один другой объект, система содержит:
для заданных условий транспортного средства и объекта средство для расчета множества точек уклонения, в которых транспортное средство будет уклоняться от соударения с, по меньшей мере, одним другим объектом посредством диапазона расстояний уклонения;
средство для отображения точек уклонения из условия, чтобы множество точек уклонения, в которых транспортное средство уклонялось бы от столкновения посредством заданного расстояния уклонения, указывающего на заданную степень конфликта, было визуально отличимым от других точек уклонения, в которых транспортное средство уклонялось бы от столкновения посредством более больших расстояний уклонения, указывающих на меньшую степень конфликта;
в силу чего отображение указывает изменяющиеся степени потенциального конфликта, чтобы тем самым представлять в отображении направленного вида диапазон доступных маневров для транспортного средства в соответствии с изменяющимися степенями конфликта.
10. Система по п.9, в которой визуально отличимые множества точек уклонения характеризуются изометрическими отображениями.
11. Система по п.10, в которой визуально отличимые множества точек уклонения характеризуются цветовой полосчатостью.
12. Система по любому из пп.9-11, в которой множество точек уклонения рассчитывается по координатам высокого разрешения.
13. Система по п.9, дополнительно содержащая:
повторение расчетов, определенных в п.9, для других условий транспортного средства и объекта, в силу чего отображенный диапазон доступных маневров обновляется в соответствии с изменениями в отношении условий транспортного средства и другого объекта.
14. Система по п.13, в которой отображение направленного вида является монохромным отображением.
15. Система по п.13, в которой отображение направленного вида является цветным отображением.
16. Система по п.9, дополнительно содержащая:
для заданных условий транспортного средства и объекта средство для расчета местоположения, по меньшей мере, одной точки столкновения, в которой транспортное средство будет соударяться с другим объектом, и
средство для отображения, по меньшей мере, одной точки столкновения в отображении направленного вида.
17. Система по п.16, дополнительно содержащая средство для расчета и отображения цифровых индикаций времени и расстояния транспортного средства от, по меньшей мере, одной точки столкновения.
18. Способ распознавания маневров для избежания столкновения в воздухе между первым летательным аппаратом и вторым летательным аппаратом, способ содержит то, что:
для заданных условий первого и второго летательного аппарата рассчитывают множество точек уклонения, в которых первый летательный аппарат будет уклоняться от соударения со вторым летательным аппаратом посредством диапазона расстояний уклонения;
отображают точки уклонения из условия, чтобы множество точек уклонения, в которых первый летательный аппарат уклонялся бы от соударения со вторым летательным аппаратом посредством заданного расстояния уклонения, указывающего на заданную степень конфликта, было визуально отличимым от других точек уклонения, в которых первый летательный аппарат уклонялся бы от соударения со вторым летательным аппаратом посредством более больших расстояний уклонения, указывающих на меньшую степень конфликта;
при этом отображение указывает изменяющиеся степени потенциального конфликта, чтобы тем самым представлять в отображении направленного вида диапазон доступных маневров для первого или второго летательного аппарата в соответствии с изменяющимися степенями конфликта.
19. Способ по п.18, в котором визуально отличимые множества точек уклонения характеризуются изометрическими отображениями.
20. Способ по п.19, в котором визуально отличимые множества точек уклонения характеризуются цветовой полосчатостью.
21. Способ по любому из пп.18-20, в котором множество точек уклонения рассчитывается по координатам высокого разрешения.
22. Способ по п.18, дополнительно содержащий то, что:
повторяют этапы, определенные в п.18, для других условий транспортного средства и объекта, в силу чего отображенный диапазон доступных маневров обновляется в соответствии с изменениями в отношении условий транспортного средства и другого объекта.
23. Способ по п.22, в котором отображение направленного вида является монохромным отображением.
24. Способ по п.22, в котором отображение направленного вида является цветным отображением.
25. Навигационная система для судна, содержащая:
средство для расчета множества точек уклонения, в которых судно будет уклоняться от соударения с, по меньшей мере, одним другим объектом посредством диапазона расстояний уклонения в соответствии с заданными условиями судна и, по меньшей мере, одного другого объекта;
средство для отображения точек уклонения из условия, чтобы множество точек уклонения, в которых судно уклонялось бы от столкновения посредством заданного расстояния уклонения, указывающего на заданную степень конфликта, было визуально отличимым от других точек уклонения, в которых судно уклонялось бы от столкновения посредством более больших расстояний уклонения, указывающих на меньшую степень конфликта;
в силу чего средство отображения показывает изменяющиеся степени потенциального конфликта, чтобы тем самым представлять в отображении направленного вида диапазон доступных маневров для судна в соответствии с изменяющимися степенями конфликта.
26. Система по п.25, в которой визуально отличимые множества точек уклонения характеризуются цветовой полосчатостью.
27. Система по п.25, дополнительно содержащая:
повторение расчетов, определенных в п.25, для других условий судна и, по меньшей мере, одного другого объекта, в силу чего отображенный диапазон доступных маневров обновляется в соответствии с изменениями в отношении условий судна и, по меньшей мере, одного другого объекта.
28. Система по п.27, в которой отображение направленного вида является монохромным отображением.
29. Система по п.27, в которой отображение направленного вида является цветным отображением.
30. Система по п.25, дополнительно содержащая средство для расчета и отображения цифровых индикаций времени и расстояния судна от, по меньшей мере, одной точки столкновения.
31. Способ распознавания маневров для перехвата объекта, содержащий то, что:
предоставляют транспортное средство для перехвата объекта;
для заданных условий транспортного средства и объекта рассчитывают множество точек уклонения, в которых транспортное средство будет уклоняться от соударения с объектом посредством диапазона расстояний уклонения;
отображают точки уклонения из условия, чтобы множество точек уклонения, в которых транспортное средство уклонялось бы от соударения с летательным аппаратом объекта посредством заданного расстояния уклонения, указывающего на заданную степень конфликта, было визуально отличимым от других точек уклонения, в которых транспортное средство уклонялось бы от соударения с объектом посредством более больших расстояний уклонения, указывающих на меньшую степень конфликта;
при этом отображение указывает изменяющиеся степени потенциального конфликта, чтобы тем самым представлять в отображении направленного вида диапазон доступных маневров для транспортного средства, чтобы перехватывать объект в соответствии с изменяющимися степенями конфликта.
| US 6604044 B1, 05.08.2003 | |||
| US 2004181318 A1, 16.09.2004 | |||
| US 2004024528 A1, 05.02.2004 | |||
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |

