Данное изобретение относится к устройству махового колеса для стабилизации положения космического аппарата, в частности, для управления положениями спутников.
Такие устройства махового колеса или балансировочные колеса известны. При помощи привода запускается вращение махового колеса, так чтобы благодаря гироскопическому эффекту можно было достичь стабилизирующего эффекта. Для достижения гироскопического эффекта целесообразно размещать как можно большую часть массы маховика как можно дальше в наружном направлении, так чтобы данная масса могла вращаться вокруг оси вращения махового колеса по как можно большему диаметру.
Из DE 3921765 A1 известно такое маховое колесо, которое подобно колесу велосипеда имеет неподвижную часть, расположенную во внутреннем положении, и ротор, расположенный во внешнем положении, а также ступицу, которая при помощи спиц вращает ротор на неподвижной части. Ступица поддерживается на неподвижной части двумя подшипниками качения с возможностью вращения.
Такие маховые колеса, также называемые маховиками, на протяжении десятилетий доказали свою способность управлять положением спутников. Поддержку ротора в них обычно осуществляют при помощи по меньшей мере двух подшипников качения, выполненных в виде неподвижного подшипника и свободного подшипника.
Настоящее изобретение относится к задаче создания устройства махового колеса, имеющего более простую конструкцию, чем известные устройства махового колеса, и снижения затрат на изготовление.
Согласно настоящему изобретению данная задача решается при помощи устройства махового колеса, имеющего признаки по п. 1 формулы изобретения. Предпочтительные варианты осуществления приведены в зависимых пунктах формулы изобретения.
Устройство махового колеса для стабилизации положения космического аппарата содержит несущий элемент, ротор, магнитный привод для вращения ротора относительно несущего элемента и подшипник качения, расположенный между ротором и несущим элементом. В этом случае, между ротором и несущим элементом при помощи магнитного привода может создаваться магнитная сила для предварительного натяга подшипника качения. Наружный диаметр ротора составляет не более 2,5 диаметров подшипника качения.
Соответственно, ротор вращается на несущем элементе при помощи магнитного привода, благодаря чему достигается желаемый гироскопический эффект стабилизации. Ротор поддерживается с возможностью вращения относительно несущего элемента при помощи подшипника качения. Однако, если предусмотрен только один подшипник качения, статически определимую опору таким образом обеспечить невозможно.
Статическая определимость достигается тем, что между ротором и несущим элементом магнитный привод создает магнитную силу. Эта магнитная сила, в частности, является притягивающей силой, которая притягивает ротор к несущему элементу. Таким образом, подшипник качения получает предварительный натяг.
Таким образом, поддержание ротора на несущем элементе соответствует определенным образом комбинации механического подшипника (подшипника качения) и магнитного подшипника, создаваемого магнитным приводом.
Данная конструкция позволяет сформировать подшипник качения намного большего размера, чем известный из предшествующего уровня техники. Хотя в предшествующем уровне техники наружный диаметр ротора может иметь диаметр, превышающий, например, более чем в 5 раз или даже более чем в 10 раз диаметр подшипника качения, в устройстве махового колеса, описанном в данном документе, наружный диаметр ротора и диаметр подшипника качения приблизительно равны друг другу.
В данном случае, диаметр подшипника качения представляет собой диаметр окружности, вдоль которой движутся центры массы тел качения во время вращения ротора. Если тела качения представляют собой, например, шарики, диаметр подшипника качения будет соответствовать диаметру окружности, по которой движутся центры шариков. Для других тел качения применимы соответствующие соотношения.
В зависимости от конкретного варианта осуществления ротор может быть выполнен так, что наружный диаметр ротора можно выбрать из группы, составляющей не более 2 диаметров подшипника качения, не более 1,5 диаметра подшипника качения, не более 1,3 диаметра подшипника качения, не более 1,2 диаметра подшипника качения. Таким образом, в зависимости от варианта осуществления наружный диаметр может составлять не более 2 диаметров, или не более 1,5 диаметра, или не более 1,3 диаметра, или не более 1,2 диаметра, или не более 1 диаметра подшипника качения.
Чем меньше соотношение между наружным диаметром ротора и диаметром подшипника качения, тем дальше в наружном направлении расположен подшипник качения по сравнению с ротором. Как будет подробно описано ниже, таким образом можно сформировать ротор даже при помощи самого внешнего упорного кольца подшипника качения. Тогда соотношение между наружным диаметром ротора и диаметром подшипника качения является небольшим, например, только приблизительно 1,17 или менее 1,2.
Соотношение может быть даже меньшим и быть, например, меньше чем 1,0, например 0,9. Тогда наружный диаметр ротора является таким же или меньше, чем диаметр подшипника качения, так что подшипник качения по сравнению с ротором расположен немного снаружи. Тогда привод может, например, располагаться в пределах внутреннего кольца подшипника качения.
Магнитный привод может содержать магнитное кольцо, расположенное на роторе и содержащее несколько магнитных полюсов, а также средство замыкания магнитной цепи, расположенное на несущем элементе напротив магнитного кольца, и магнитные катушки, расположенные на несущем элементе между магнитным кольцом и средством замыкания магнитной цепи. Магнитный привод может быть, таким образом, сформирован известным способом и может заставлять ротор вращаться относительно несущего элемента при помощи расположенного по окружности линейного двигателя.
Магнитная сила, действующая между ротором и несущим элементом, может, в частности, создаваться между магнитным кольцом и средством замыкания магнитной цепи во время использования устройства махового колеса. Необходимая магнитная сила в этом случае предварительно задается конструкцией подшипника качения, в частности выбранным или требуемым предварительным натягом подшипника, и должна учитываться при конструировании магнитного привода. Для соответствующей конструкции и используемого в магнитном приводе электрического тока можно обеспечить и поддерживать требуемый предварительный натяг подшипника. Кроме того, создаваемый магнитным путем предварительный натяг можно также усилить дополнительным удерживающим магнитом, как будет объяснено ниже.
Как уже отмечалось выше, ротор можно поддерживать на несущем элементе при помощи только одного подшипника качения. Таким образом, в отличие от предшествующего уровня техники для обеспечения статически определимой опоры второй подшипник качения не требуется.
Возможно, только один подшипник качения может быть также реализован в виде двух окружностей тел качения (например, колец из шариков), расположенных вплотную друг к другу и работающих как один подшипник. Это позволяет достичь повышенной несущей способности подшипника качения. Такие подшипники качения с двумя окружностями тел вращения имеются в распоряжении общепризнанных производителей подшипников качения и поэтому известны. Они могут воспринимать повышенную нагрузку, но считаются только одним подшипником качения.
Подшипник качения может быть выполнен так, чтобы воспринимать радиальные усилия и осевые усилия. В частности, целесообразным является восприятие осевых усилий, поскольку магнитный привод со своей стороны создает осевое усилие в виде силы предварительного натяга для подшипника качения. Данное осевое усилие должно быть воспринято подшипником качения вместе с дополнительными силами, например, гравитационной силой ротора.
Следовательно, подходящим выбором подшипника качения может быть, например, осевой подшипник, шпиндельный шариковый подшипник или тому подобное.
Осевые усилия должны восприниматься подшипником качения только в одном направлении, если обеспечено, что сила предварительного натяга, создаваемая магнитным приводом, всегда достаточна для предварительного натяга подшипника качения. Это гарантирует, что подшипник качения не распадается.
Тела качения подшипника качения, например, шарики, могут направляться в обойму, которая затем может одновременно использоваться для повторной смазки подшипника. Повторная смазка может также осуществляться с помощью специальной смазочной системы, в которой, по меньшей мере, часть компонентов расположена на роторе, который вращается, а также в открытом внутреннем пространстве, окруженном ротором.
Подшипник качения может также содержать нижнее упорное кольцо, расположенное на несущем элементе, и верхнее упорное кольцо, расположенное на роторе. Термины «нижнее упорное кольцо» и «верхнее упорное кольцо» здесь выбраны произвольным образом, чтобы иметь возможность отличать два упорных кольца в соответствии с их назначением. Точно также, например, можно было бы сказать «первое упорное кольцо» и «второе упорное кольцо». Относительно ориентации в пространстве, выражения «нижний» и «верхний» не имеют значения.
Согласно одному варианту осуществления верхнее упорное кольцо, расположенное на роторе, может быть внешним упорным кольцом, тогда как нижнее упорное кольцо в этом случае образует внутреннее упорное кольцо. Точно также, в качестве варианта может иметь место обратное расположение, в котором верхнее упорное кольцо соответствует внутреннему упорному кольцу, а нижнее упорное кольцо - внешнему упорному кольцу.
В частности, нижнее упорное кольцо, расположенное на несущем элементе, может в качестве варианта состоять из керамического материала с целью уменьшения веса, что может иметь большое значение в отношении предполагаемого использования устройства махового колеса.
Верхнее упорное кольцо может быть выполнено на роторе за одно целое. В частности, верхнее упорное кольцо и ротор могут образовывать только одну часть, так что верхнее упорное кольцо является составной частью ротора. Верхнее упорное кольцо само по себе служит в качестве массы махового колеса или непосредственно встроено в кольцо махового колеса (ротор). Упорное кольцо в этом случае служит в качестве несущего элемента для магнитных полюсов.
Верхнее упорное кольцо прижимается силами магнитного двигателя к нижнему упорному кольцу или внутрь него. Подшипник может свободно вращаться и он приводится в действие при помощи встроенного двигателя. Магнитный привод заменяет таким образом второй подшипник качения и тем самым упрощает конструкцию, что также снижает затраты.
Кроме того, за счет использования только одного подшипника качения создается меньше рабочего шума. Благодаря компактной конструкции устройства махового колеса рабочий шум также не увеличивается дополнительными резонансными колебаниями корпуса, которые обычно имеют место у маховых колес предшествующего уровня техники. Таким образом, сложное предварительное напряжение подшипника качения может быть опущено, поскольку предварительное напряжение подшипника регулируется при помощи магнитного привода. Это также упрощает и сборку.
Согласно варианту осуществления ротор может быть снабжен дополнительной массой. Ротор формирует в данном случае одно из упорных колец подшипника качения и несет, как подробно описано выше, магнитное кольцо, принадлежащее магнитному приводу. Дополнительная масса может крепиться к ротору в виде отдельного дополнительного элемента.
В частности, дополнительная масса может быть предоставлена в виде дополнительного массивного кольца, расположенного на роторе.
Увеличение массы ротора позволяет создавать более значительные гироскопические силы, что увеличивает стабилизацию положения космического аппарата. Это, в частности, целесообразно в том случае, если космический аппарат представляет собой спутник большего размера, который имеет большую массу и, следовательно, большую инерцию.
Обеспечение дополнительной массы предусматривает, например, модульную конструкцию устройства махового колеса. Если предполагается использование устройства махового колеса для меньших по размеру и менее тяжелых спутников, то для создания достаточно больших сил стабилизации может быть достаточно только одного ротора. Если предполагается использование на более крупном и тяжелом космическом аппарате, то дополнительно может быть предусмотрена дополнительная масса
Дополнительная масса благодаря своей гравитационной силе в соответствующих гравитационных условиях может создавать силу, которая действует противоположно магнитной силе, создаваемой магнитным приводом, и тем самым приводит к тому, что подшипник качения разделяется или отделяется. В этом случае может быть целесообразным, чтобы на роторе или на несущем элементе располагался удерживающий магнит, работающий между ротором и несущим элементом и создающий магнитную удерживающую силу между ротором и несущим элементом.
Удерживающий магнит может быть, например, удерживающим магнитным кольцом, закрепленным на роторе. Удерживающее магнитное кольцо также может располагаться, например, внутри ротора.
Удерживающая сила, создаваемая удерживающим магнитом, является притягивающей силой для удержания вместе ротора и несущего элемента, если магнитная сила магнитного привода недостаточна для удержания тяжелого ротора, который кроме того возможно снабжен дополнительной массой на несущем элементе.
Для смазки подшипника качения может быть предусмотрено смазочное устройство. Это может быть, например, обойма, как уже указано выше, которая одновременно удерживает также тела качения в их соответствующем положении. Точно так же возможно, что смазочное устройство расположено на вращающемся роторе или в открытом внутреннем пространстве, окруженном ротором, и служит в качестве системы повторной смазки. В частности, смазочное устройство может быть выполнено с возможностью активного или пассивного действия.
Например, в пассивном смазочном устройстве смазочное средство, например, масло или смазка для подшипников, может поступать для смазки подшипника качения благодаря центробежным силам во время вращения ротора. Также возможна капиллярная смазка при помощи соответствующих капиллярных средств.
В активном смазочном устройстве может присутствовать блок подачи смазки. Это может быть, например, смазочный насос также использующий, например, пьезоэлемент, который доставляет смазочное средство, как в инжекционной системе.
Эти и дополнительные преимущества и возможности будут объяснены далее на примере со ссылкой на прилагаемый чертеж, на котором показано:
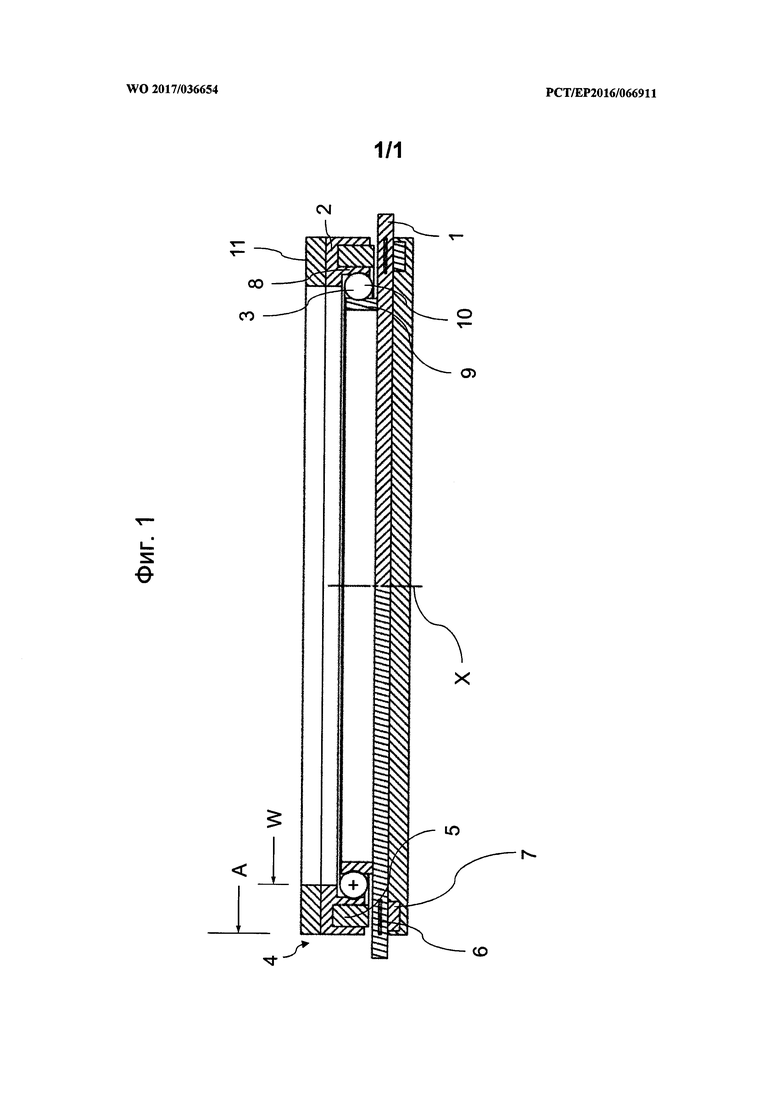
Фиг. 1 - поперечное сечение устройства махового колеса.
На фиг. 1 показан вид в разрезе устройства махового колеса для стабилизации положения космического аппарата, например, спутника.
Устройство махового колеса содержит несущий элемент 1, который несет ротор 2 с возможностью вращения.
Несущий элемент 1 должен иметь достаточную устойчивость и, в частности, жесткость при кручении, чтобы надежно нести ротор 2 также в отношении сил, действующих во время использования.
Ротор 2 поддерживается на несущем элементе 1 при помощи подшипника 3 качения. Ротор 2 представляет собой фактическое маховое колесо или балансировочное колесо, которое вращается во время использования с высокой круговой частотой и, благодаря этому, создает требуемые гироскопические силы для стабилизации космического аппарата.
Ротор 2 имеет соответствующий диаметр, например, до 200 мм или даже более. В результате того, что вся масса ротора 2 расположена снаружи, то есть вдали от средней оси X, необходимые гироскопические силы могут создаваться с высокой эффективностью.
Для вращения ротора 2 относительно несущего элемента 1 предусмотрен магнитный привод 4. Магнитный привод 4 содержит магнитное кольцо 5, которое несет ротор 2, и которое имеет соответствующее количество магнитных полюсов.
Дополнительно, магнитный привод 4 содержит несколько магнитных катушек 6, которые расположены соответствующим образом в несущем элементе 1 или на нем и могут управляться при помощи управляющего элемента, который не показан.
Дополнительно, на задней стороне несущего элемента 1 в качестве части магнитного привода 4 также предусмотрено средство 7 замыкания магнитной цепи.
Магнитный привод 4 в целом представляет собой магнитный линейный двигатель, расположенный по окружности. Управляющий элемент соответствующим образом управляет магнитными катушками 6, так что они работают совместно с магнитными полюсами в магнитном кольце 5 и вызывают вращение ротора 2. Конструкция такого магнитного привода 4 известна, поэтому подробное описание будет здесь опущено.
Управляющая электроника и, в частности, дополнительные компоненты (силовая электроника или тому подобное), например, могут быть расположены на несущем элементе 1 в пространстве, окруженном ротором 2 и открытом, как можно видеть на фиг. 1. Это обеспечивает очень компактную конструкцию махового колеса. В пространстве также могут располагаться компоненты системы повторной смазки, служащей в качестве смазочного устройства, которое содержит, например, пьезоэлемент, для подачи смазки для подшипника 3 качения.
Подшипник 3 качения может быть, например, шарикоподшипником с канавками, как показано на фиг. 1. Однако могут использоваться и другие типы подшипников, такие как, например, подшипники с цилиндрическими роликами, тип подшипников с бочкообразными роликами или тому подобное. Подшипник 3 качения содержит внешнее упорное кольцо 8 (также называемое верхним упорным кольцом), а также внутреннее упорное кольцо 9 (также называемое нижним упорным кольцом). Между двумя упорными кольцами 8, 9 расположены тела качения, которые приведены в примере, показанном на фиг. 1, в виде шариков 10.
Внешнее упорное кольцо 8 является составной частью ротора 2. Другими словами можно сказать, что ротор 2 в примере, показанном на фиг. 1, образован упорным кольцом 8. Для других примеров, не показанных на фиг. 1, внешнее кольцо 8 подшипника также может быть выполнено в виде отдельного элемента, закрепленного на роторе 2.
Для надлежащей работы подшипника 3 качения между упорными кольцами 8, 9 должно быть равномерно распределено соответствующее и достаточное количество шариков 10. Для обеспечения равного расстояния между шариками 10 по окружности подшипника качения, шарики 10 удерживаются известным способом с помощью несущей обоймы, которая на фиг. 1 не показана. Обойма подшипника может использоваться не только для удержания шариков в их соответствующих положениях, но также может использоваться для обеспечения смазочного средства, чтобы гарантировать продолжительную смазку подшипника 3 качения. В частности, для использования устройства махового колеса на спутниках смазка обычно требуется в течение всего срока эксплуатации.
Смазка также может осуществляться, например, за счет центробежных сил и, например, с помощью не показанного смазочного устройства, которое располагается на вращающихся частях. Кроме того, смазочное устройство может быть предусмотрено в открытом пространстве во внутренней части подшипника 3 качения, которое использует, например, капиллярную смазку или активную систему смазки, имеющую средство подачи смазки. Средство подачи смазки может быть, например, пьезоинжекционным элементом.
Ротор 2 и подшипник 3 качения расположены с возможностью вращения симметрично вокруг средней оси X. Наружный диаметр А ротора 2 может в этом случае быть лишь немного больше диаметра W подшипника 3 качения.
Диаметр W подшипника качения определен так, что он соответствует диаметру круга, по которому движутся центры тяжести тел качения (в данном случае шарики 10).
Чем меньше соотношение между наружным диаметром А ротора 2 и диаметром W подшипника качения, тем более эффективной и компактной может быть конструкция ротора 2. Например, максимальное соотношение 1,5 оказалось особенно подходящим. В примерном устройствое махового колеса, показанном на фиг. 1, соотношение между наружным диаметром А и диаметром W подшипника качения составляет приблизительно 1,2.
Как уже было объяснено, механическая опора ротора 2 на несущем элементе 1 обеспечена только одним подшипником 3 качения. Чтобы предотвратить распад подшипника 3 качения и обеспечить статически определимую опору между ротором 2 и несущим элементом 1 при помощи магнитного привода 4 дополнительно создается магнитная сила (притягивающая сила). Данная магнитная сила должна быть достаточно большой, чтобы предотвратить распад подшипника 3 качения.
Таким образом, устройство махового колеса может работать надежно и устойчиво.
В примере, показанном на фиг. 1, на роторе 2 предусмотрена дополнительная масса, имеющая форму дополнительного массивного кольца 11. Дополнительное массивное кольцо 11 расположено на верхней стороне ротора 2 и увеличивает общую массу махового колеса ротора 2.
Поскольку дополнительное массивное кольцо 11 образует отдельную часть по отношению к ротору 2 или внешнему упорному кольцу 8, в процессе изготовления устройства махового колеса можно простым способом предусмотреть различные дополнительные массы путем выбора различных дополнительных массивных колец 11 для достижения различных эффектов махового колеса.
Если, в частности в случае большой дополнительной массы, обеспечиваемой дополнительным массивным кольцом 11, масса всего ротора 2 является большой, то существует возможность, что удерживающее магнитное усилие магнитного привода 4 не будет достаточным, для предотвращения отделения подшипника 3 качения. В этом случае может быть предпочтительным, чтобы на роторе 2 или на несущем элементе 1 был дополнительно предусмотрен удерживающий магнит, не показанный на фиг. 1, для создания дополнительной магнитной удерживающей силы между ротором 2 и несущим элементом 1. Поскольку удерживающее магнитное кольцо не содержит дополнительных механических подвижных частей, оно не подвержено износу. Кроме того, оно не создает дополнительных вибраций, которые могут ухудшать работу устройства махового колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОВИКОВАЯ СИСТЕМА НАКОПЛЕНИЯ ЭНЕРГИИ | 2002 |
|
RU2291541C2 |
| Смазочное устройство | 1980 |
|
SU1839905A1 |
| ГАЗОГЕНЕРАТОР ГТД | 2012 |
|
RU2487258C1 |
| ГАСИТЕЛЬ ПРОДОЛЬНЫХ КОЛЕБАНИЙ | 1995 |
|
RU2110710C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГАСИТЕЛЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ И ГАСИТЕЛЬ КРУТИЛЬНЫХ КОЛЕБАНИЙ | 1998 |
|
RU2222732C2 |
| Электрошпиндель | 1991 |
|
SU1784407A1 |
| ТУРБОКОМПРЕССОР С ГАЗОМАГНИТНЫМИ ПОДШИПНИКАМИ | 2014 |
|
RU2549002C1 |
| ШПИНДЕЛЬ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2433241C1 |
| Подшипниковая опора герметичного центробежного насоса с магнитной муфтой | 2021 |
|
RU2778414C1 |
| ОБЕСПЕЧИВАЮЩАЯ ВОЗМОЖНОСТЬ ВРАЩЕНИЯ ОПОРА С ФЛАНЦЕВОЙ ЦАПФОЙ | 2021 |
|
RU2823821C1 |
Изобретение относится к космической технике, в частности к устройствам управления относительным движением космического аппарата, а именно к устройству маховиков систем ориентации. Маховое колесо содержит несущий элемент, ротор, магнитный привод для вращения ротора относительно несущего элемента и подшипник качения, расположенный между ротором и несущим элементом. Между ротором и несущим элементом при помощи магнитного привода обеспечена возможность создания магнитной силы для предварительного натяга подшипника качения. Наружный диаметр ротора может составлять, например, не более 2,5 диаметров подшипника качения. 11 з.п. ф-лы, 1 ил. 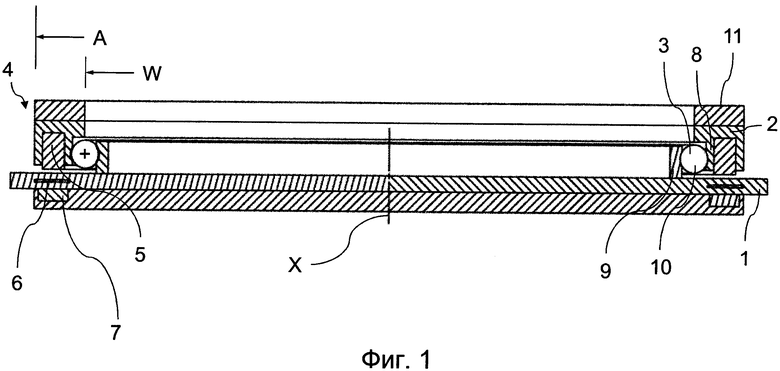
1. Устройство махового колеса для стабилизации положения космического аппарата, содержащее:
несущий элемент (1);
ротор (2);
магнитный привод (4) для вращения ротора (2) относительно несущего элемента (1) и
подшипник (3) качения, расположенный между ротором (2) и несущим элементом (1); причем
между ротором (2) и несущим элементом (1) при помощи магнитного привода (4) обеспечена возможность создания магнитной силы для предварительного натяга подшипника (3) качения; и
наружный диаметр (А) ротора составляет не более 2,5 диаметров (W) подшипника качения.
2. Устройство махового колеса по п. 1, в котором ротор (2) выполнен так, что наружный диаметр (А) ротора (2) выбран из группы:
не более 2 диаметров (W) подшипника качения,
не более 1,5 диаметра (W) подшипника качения,
не более 1,3 диаметра (W) подшипника качения,
не более 1,2 диаметра (W) подшипника качения,
не более 1,0 диаметра (W) подшипника качения.
3. Устройство махового колеса по п. 1 или 2, в котором магнитный привод (4) содержит:
магнитное кольцо (5), расположенное на роторе (2) и содержащее магнитные полюса;
средство (7) замыкания магнитной цепи, расположенное на несущем элементе (1) противоположно магнитному кольцу (5); и
магнитные катушки (6), расположенные на несущем элементе (1) между магнитным кольцом (5) и средством (7) замыкания магнитной цепи.
4. Устройство махового колеса по п. 3, в котором между магнитным кольцом (5) и средством (7) замыкания магнитной цепи во время использования устройства махового колеса обеспечена возможность создания магнитной силы.
5. Устройство махового колеса по одному из предыдущих пунктов, в котором между ротором (2) и несущим элементом (1) расположен только один подшипник (3) качения.
6. Устройство махового колеса по одному из предыдущих пунктов, в котором подшипник (3) качения выполнен с возможностью воспринимать радиальные силы и осевые силы.
7. Устройство махового колеса по одному из предыдущих пунктов, в котором подшипник (3) качения содержит:
нижнее упорное кольцо (9), расположенное на несущем элементе (1); и
верхнее упорное кольцо (8), расположенное на роторе (2).
8. Устройство махового колеса по п. 7, в котором верхнее упорное кольцо (8) выполнено за одно целое на роторе (2).
9. Устройство махового колеса по одному из предыдущих пунктов, в котором на роторе (2) предусмотрена дополнительная масса (11).
10. Устройство махового колеса по п. 9, в котором дополнительная масса образована в виде дополнительного массивного кольца (11), расположенного на роторе (2).
11. Устройство махового колеса по одному из предыдущих пунктов, в котором на роторе (2) или на несущем элементе (1) расположен удерживающий магнит, который работает между ротором (2) и несущим элементом (1) для создания магнитной удерживающей силы между ротором (2) и несущим элементом (1).
12. Устройство махового колеса по одному из предыдущих пунктов, в котором для смазки подшипника качения предусмотрено смазочное устройство.
| US 4285553 A, 25.08.1981 | |||
| Установка для сушки травы | 1985 |
|
SU1216597A1 |
| Устройство для предохранения инструмента | 1971 |
|
SU450654A1 |

