Область техники
Настоящее изобретение относится к системе и способу управления движением автономного транспортного средства.
Уровень техники
[0001] Автономные транспортные средства могут управляться для следования по центральной линии пути путем регулировки угла поворота транспортного средства. Это отличается от типичного поведения человека при вождении, которое учитывает самоустанавливающиеся крутящие моменты, прикладываемые к рулевой колонке во время маневров при движении, а также обычно позволяет большее отклонение от центральной линии.
Краткое изложение существа изобретения
Согласно одному аспекту изобретения предложена система управления крутящим моментом рулевой колонки, содержащая компьютер, включающий в себя процессор и память, причем память хранит инструкции, исполняемые процессором так, что компьютер запрограммирован с возможностью: определения вдоль номинальной траектории, предназначенной для проезда транспортным средством, потенциального поля, представляющего собой коридор движения для транспортного средства, причем потенциальное поле включает в себя потенциал притяжения, который направляет транспортное средство так, чтобы оно оставалось в пределах коридора; идентификации первого положения транспортного средства относительно потенциального поля в текущий момент времени; вычисления крутящего момента для приложения к рулевой колонке по меньшей мере частично на основании первого положения относительно потенциального поля; и приложения крутящего момента к рулевой колонке транспортного средства.
Согласно одному варианту осуществления системы компьютер запрограммирован с возможностью увеличения потенциала притяжения, когда первое расстояние от первого положения до номинальной траектории увеличивается.
Согласно другому варианту осуществления системы первое отношение между потенциалом притяжения и первым расстоянием является квадратичным.
Согласно другому варианту осуществления системы потенциальное поле определено так, что номинальная траектория находится в непосредственном центре потенциального поля вдоль направления перемещения.
Согласно другому варианту осуществления системы компьютер дополнительно запрограммирован с возможностью: идентификации второго положения относительно потенциального поля, причем второе положение указывает прогнозируемое будущее положение транспортного средства в первый предварительно заданный период времени после текущего момента времени, причем определение крутящего момента, подлежащего приложению к рулевой колонке транспортного средства, по меньшей мере частично основано на втором положении.
Согласно другому варианту осуществления системы прикладываемый крутящий момент определен частично на основании первого направления перемещения транспортного средства и первой скорости транспортного средства, и компьютер дополнительно запрограммирован с возможностью вычисления второго положения, равного первому положению плюс первое смещение, равное произведению первой скорости и первого предварительно заданного периода времени вдоль первого направления перемещения.
Согласно другому варианту осуществления системы потенциальное поле дополнительно включает в себя потенциал отталкивания, причем потенциал отталкивания направляет транспортное средство от объектов в пределах заданного расстояния от номинальной траектории.
Согласно другому варианту осуществления системы компьютер дополнительно запрограммирован с возможностью: вычисления потенциала отталкивания на основании второго расстояния транспортного средства от объекта.
Согласно другому варианту осуществления системы потенциал отталкивания увеличивается, когда второе расстояние уменьшается.
Согласно другому варианту осуществления системы потенциальное поле представляет собой сумму поля потенциала притяжения и поля потенциала отталкивания.
Согласно другому варианту осуществления системы компьютер дополнительно запрограммирован с возможностью: вычисления отрицательного градиента  ; и определения крутящего момента частично на основании отрицательного градиента; где
; и определения крутящего момента частично на основании отрицательного градиента; где  представляет собой потенциальное поле в положении x на двумерной плоскости.
представляет собой потенциальное поле в положении x на двумерной плоскости.
Согласно другому варианту осуществления системы компьютер дополнительно запрограммирован с возможностью: определения крутящего момента  где:
где:  представляет собой отрицательный градиент потенциального поля в прогнозируемом будущем положении
представляет собой отрицательный градиент потенциального поля в прогнозируемом будущем положении  ; t представляет собой текущий момент времени; L представляет собой предварительно заданный период времени;
; t представляет собой текущий момент времени; L представляет собой предварительно заданный период времени;  представляет собой пропорциональный коэффициент усиления; и
представляет собой пропорциональный коэффициент усиления; и  представляет собой дифференциальный коэффициент усиления.
представляет собой дифференциальный коэффициент усиления.
Согласно второму аспекту изобретения предложен способ управления крутящим моментом рулевой колонки, содержащий этапы, на которых: определяют, посредством компьютера, вдоль номинальной траектории, предназначенной для проезда транспортным средством, потенциальное поле, представляющее собой коридор движения для транспортного средства, причем потенциальное поле включает в себя потенциал притяжения, который направляет транспортное средство так, чтобы оно оставалось в пределах коридора; идентифицируют первое положение транспортного средства относительно потенциального поля в текущий момент времени; вычисляют крутящий момент для приложения к рулевой колонке по меньшей мере частично на основании первого положения; и прикладывают крутящий момент к рулевой колонке транспортного средства.
Согласно одному варианту осуществления способа компьютер запрограммирован с возможностью увеличения потенциала притяжения, когда первое расстояние от первого положения до номинальной траектории увеличивается.
Согласно другому варианту осуществления способа первое отношение между потенциалом притяжения и первым расстоянием является квадратичным.
Согласно другому варианту осуществления способа потенциальное поле определено так, что номинальная траектория находится в непосредственном центре потенциального поля вдоль направления перемещения.
Согласно другому варианту осуществления способ дополнительно содержит этап, на котором: идентифицируют второе положение относительно потенциального поля, причем второе положение указывает прогнозируемое будущее положение транспортного средства в первый предварительно заданный период времени после текущего момента времени, причем определение крутящего момента. подлежащего приложению к рулевой колонке транспортного средства, по меньшей мере частично основано на втором положении.
Согласно другому варианту осуществления способа прикладываемый крутящий момент определяют частично на основании первого направления перемещения транспортного средства и первой скорости транспортного средства, и компьютер дополнительно запрограммирован с возможностью вычисления второго положения, равного первому положению плюс первое смещение, равное произведению первой скорости и первого предварительно заданного периода времени вдоль первого направления перемещения.
Согласно другому варианту осуществления способа потенциальное поле дополнительно включает в себя потенциал отталкивания, причем потенциал отталкивания направляет транспортное средство от объектов в пределах заданного расстояния от номинальной траектории.
Согласно другому варианту осуществления способ дополнительно содержит этап, на котором: вычисляют потенциал отталкивания на основании второго расстояния транспортного средства от объекта.
Согласно другому варианту осуществления способа потенциал отталкивания увеличивается, когда второе расстояние уменьшается.
Согласно другому варианту осуществления способа потенциальное поле представляет собой сумму поля потенциала притяжения и поля потенциала отталкивания.
Согласно другому варианту осуществления способ дополнительно содержит этапы, на которых: вычисляют отрицательный градиент ; и определяют крутящий момент частично на основании отрицательного градиента; где представляет собой потенциальное поле в положении x на двумерной плоскости.
Согласно другому варианту осуществления способ дополнительно содержит этап, на котором: определяют крутящий момент , где: представляет собой отрицательный градиент потенциального поля в прогнозируемом будущем положении ; t представляет собой текущий момент времени; L представляет собой заданный период времени; представляет собой пропорциональный коэффициент усиления; и представляет собой дифференциальный коэффициент усиления.
Чертежи
[0002] Фигура 1 представляет собой схему примерного транспортного средства, включающего в себя основанное на потенциальных полях управление крутящим моментом при рулении.
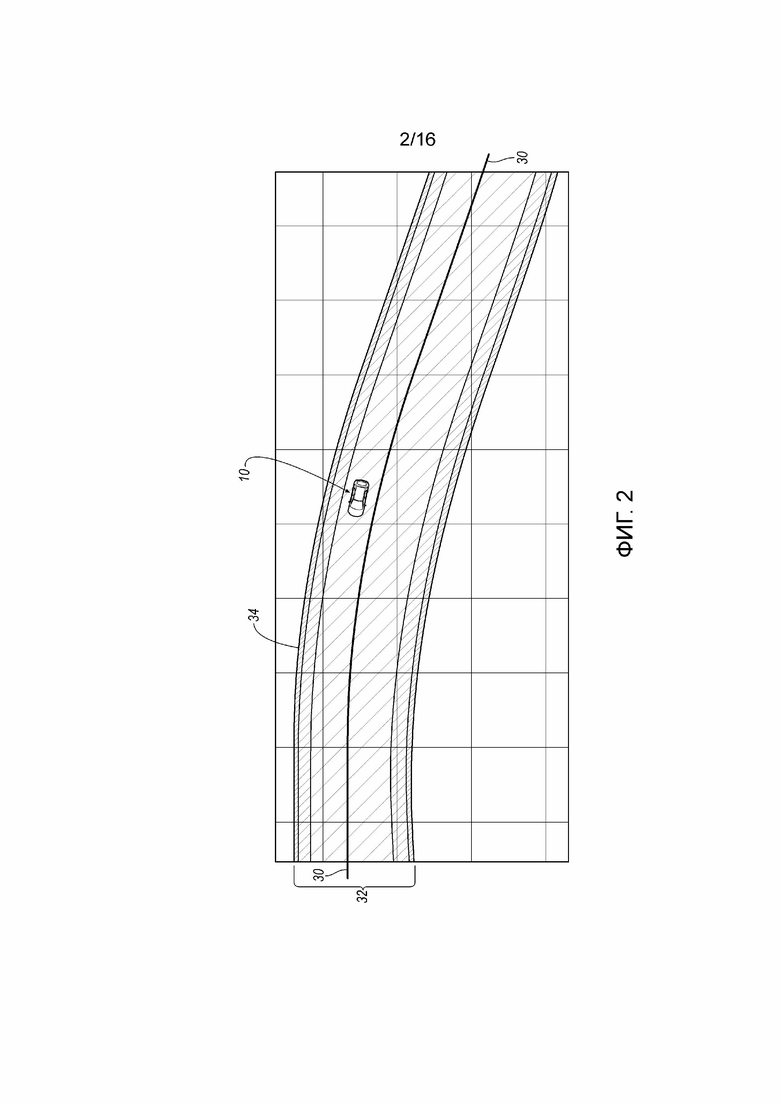
[0003] Фигура 2 представляет собой схему примерного транспортного средства на Фигуре 1 на проезжей части, включая изображение потенциального поля.
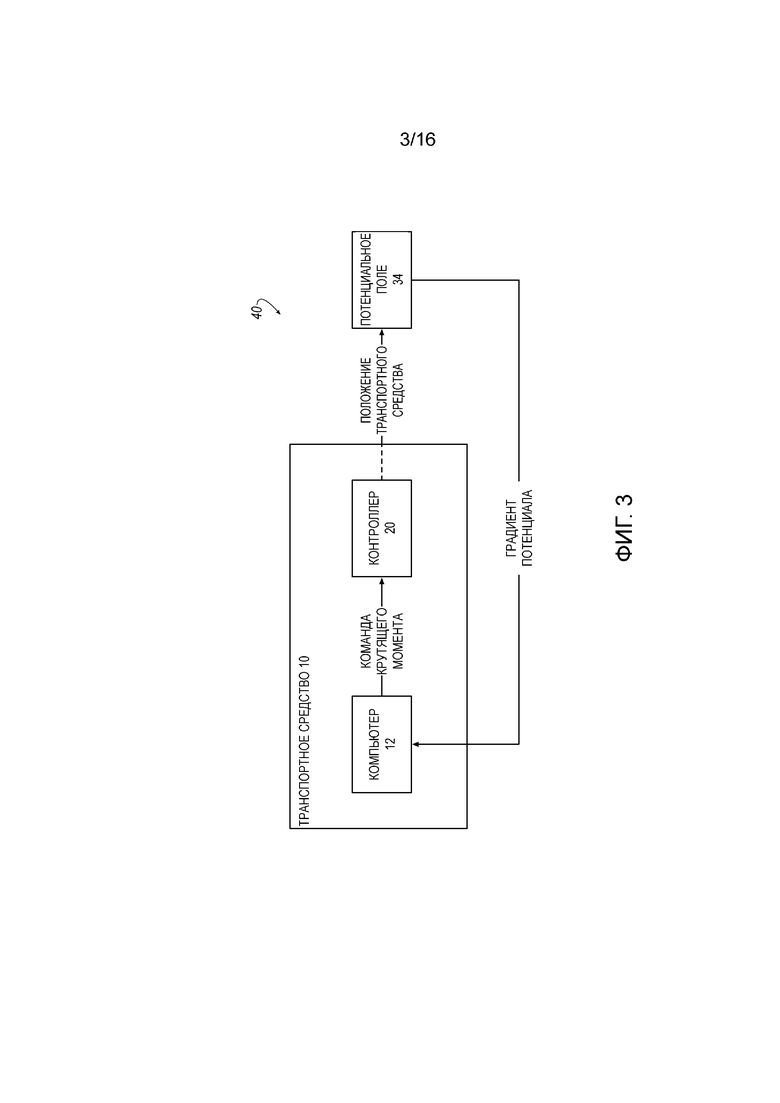
[0004] Фигура 3 представляет собой схему примерного управления с обратной связью для основанной на полях системы управления крутящим моментом.
[0005] Фигура 4 представляет собой схему примерного процесса для основанной на полях системы управления крутящим моментом.
[0006] Фигура 5 представляет собой схему испытательной траектории для испытания примерной основанной на полях системы управления крутящим моментом.
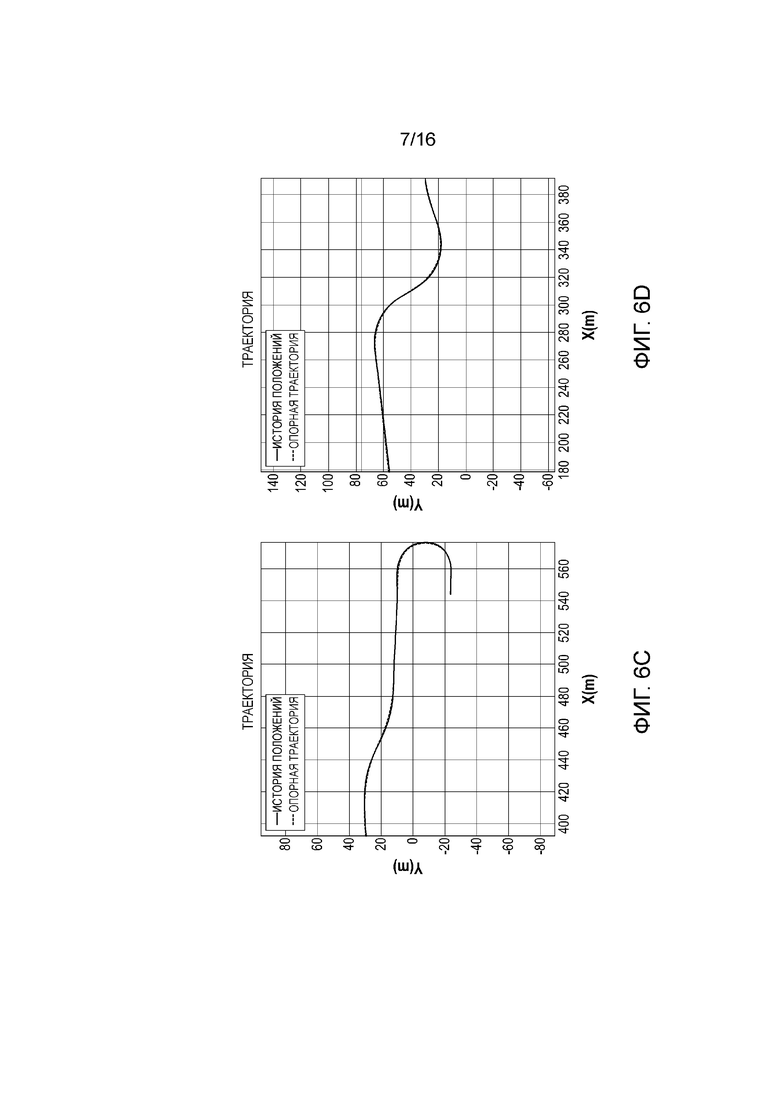
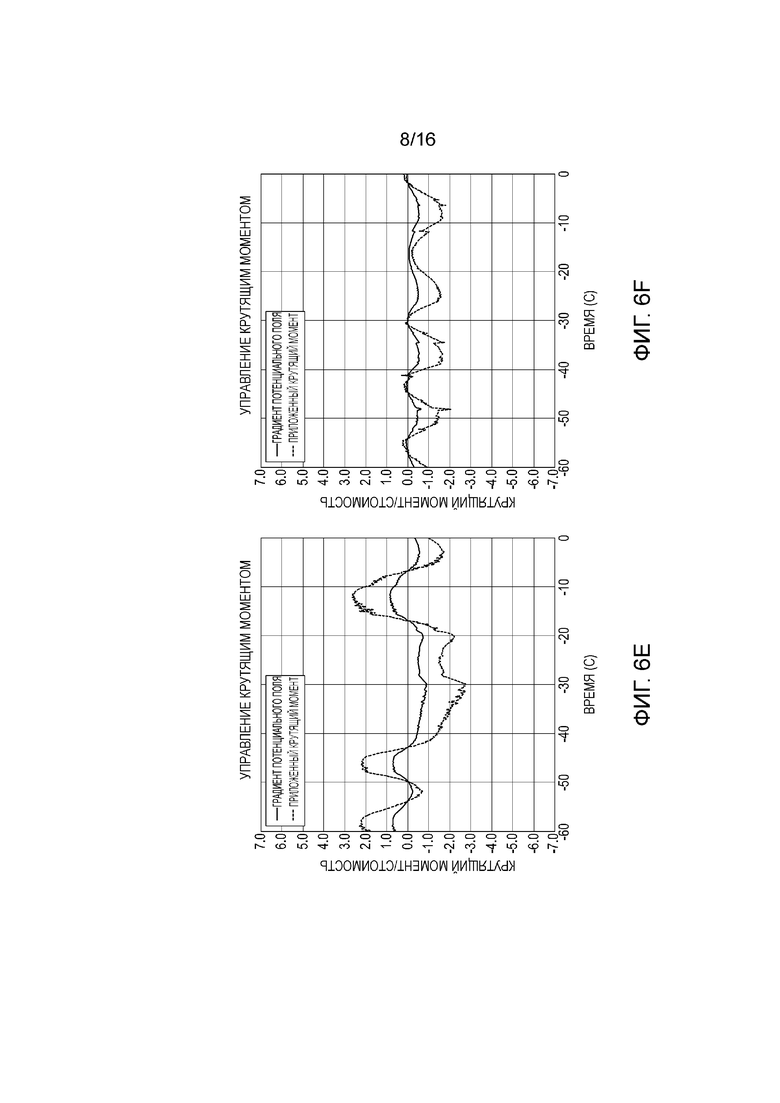
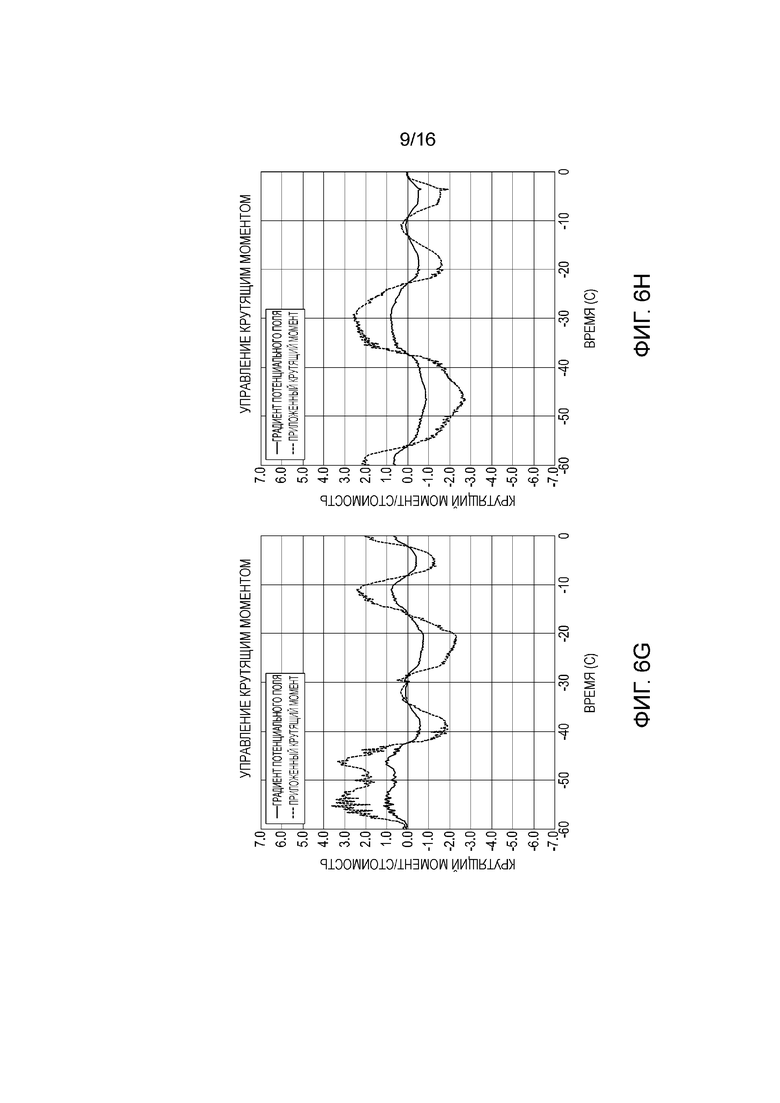
[0007] Фигура 6 представляет собой множество графиков, указывающих траекторию, входные данные контроллера крутящего момента и выходные данные контроллера крутящего момента при испытании примерной основанной на полях системы управления крутящим моментом.
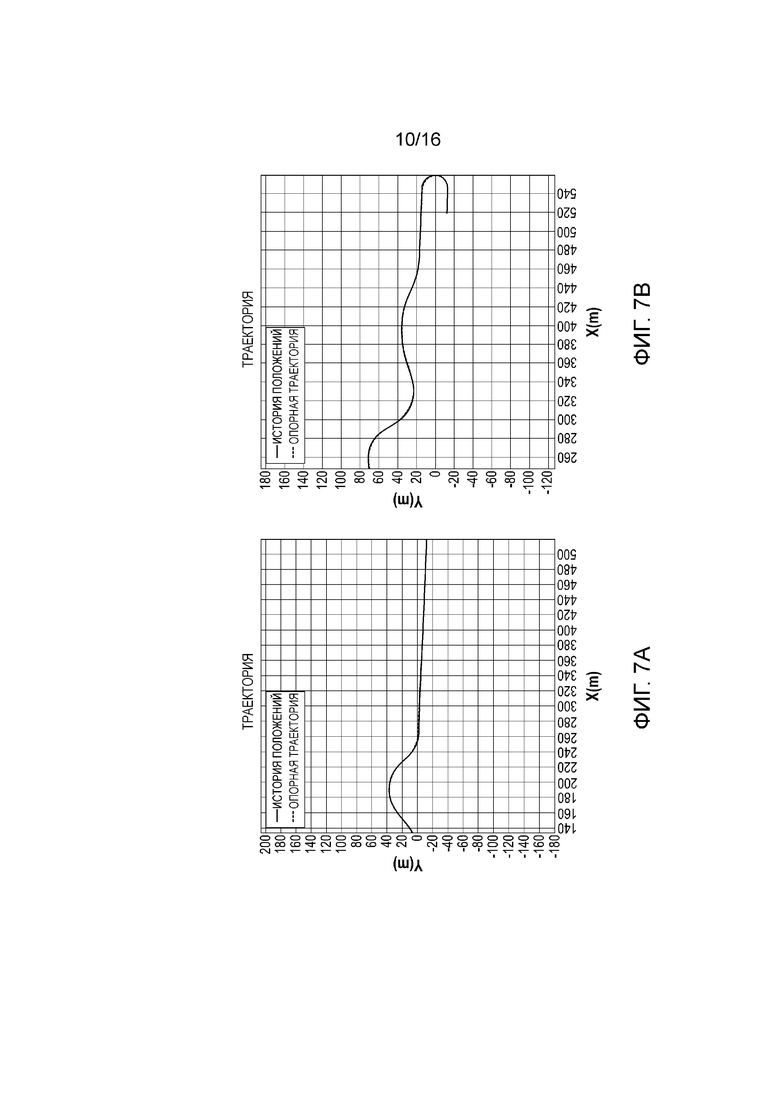
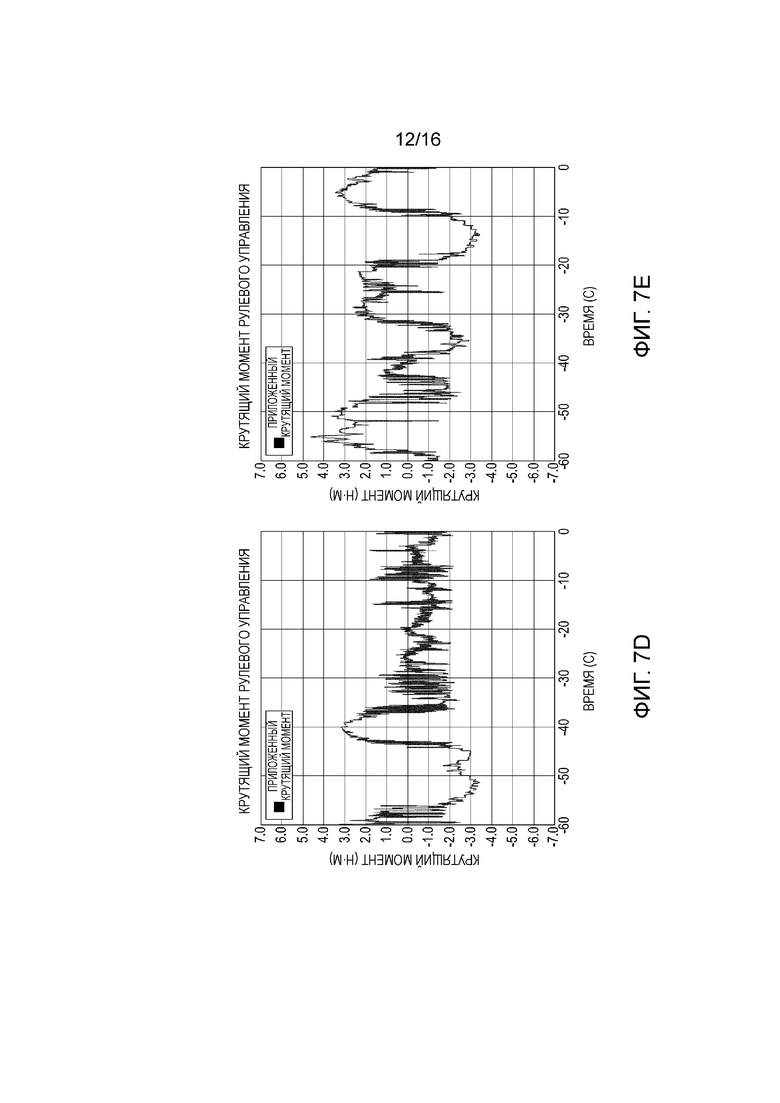
[0008] Фигура 7 представляет собой множество графиков, указывающих траекторию и приложенный крутящий момент при испытании системы управления углом поворота рулевого колеса (SWA).
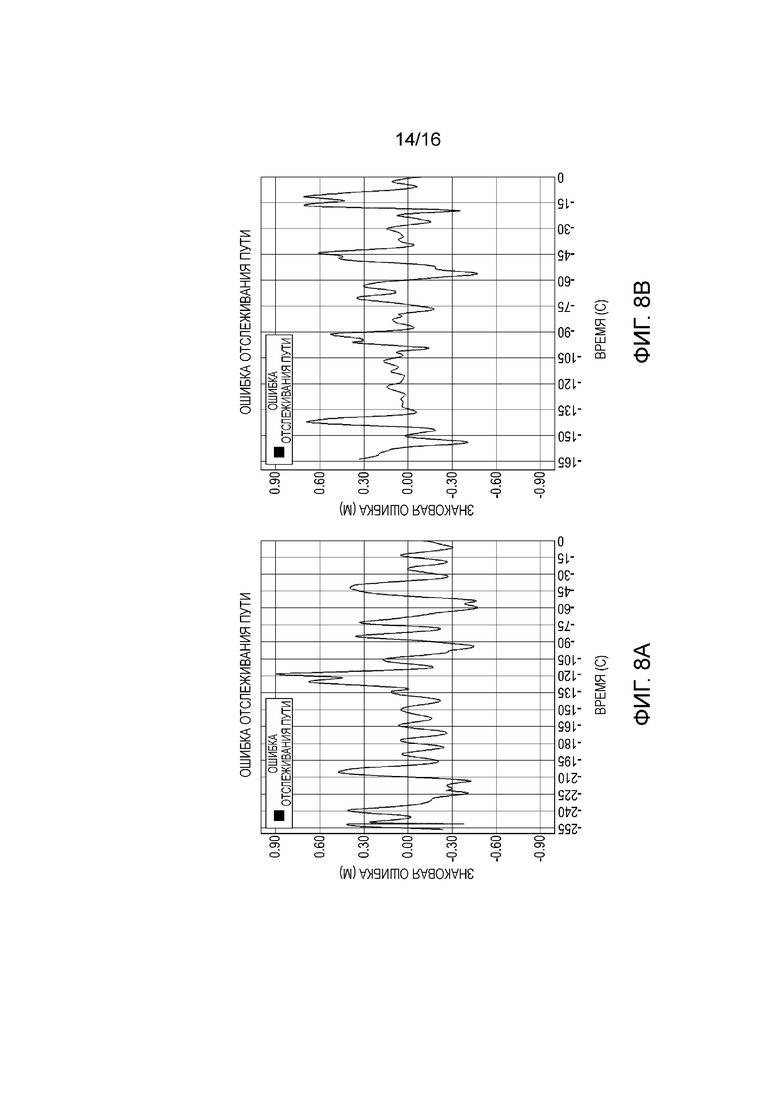
[0009] Фигура 8a представляет собой график, указывающий производительность отслеживания основанной на полях системы управления крутящим моментом.
[0010] Фигура 8b представляет собой график, указывающий производительность отслеживания системы управления SWA.
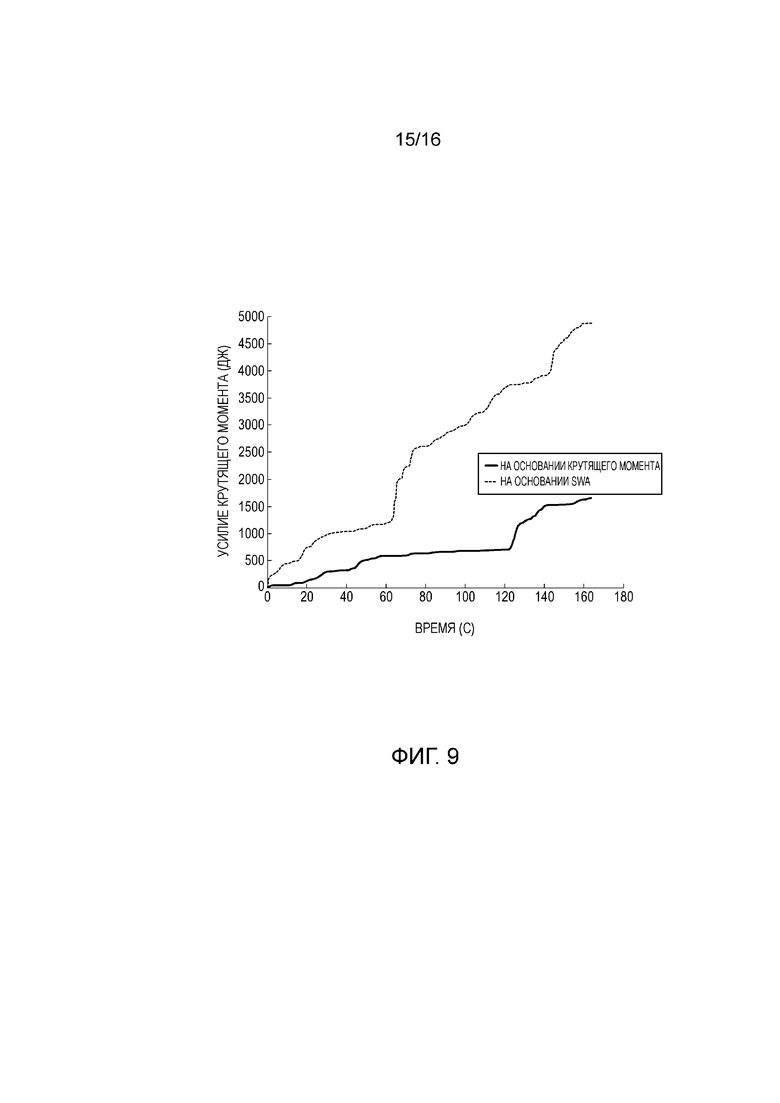
[0011] Фигура 9 представляет собой график, указывающий общую работу (в Джоулях) основанной на полях системы управления крутящим моментом и системы управления SWA.
[0012] Фигура 10 представляет собой схему примерного транспортного средства с основанным на полях рулевым управлением на проезжей части, включающей в себя первое потенциальное поле вдоль номинальной траектории и второе потенциальное поле, связанное с препятствием.
Подробное описание
Обзор
[0013] Рулевое управление автономным транспортным средством с использованием потенциальных полей и управления крутящим моментом при рулении позволяет транспортному средству отклоняться от номинальной траектории в пределах определенного коридора и более приближено к манере вождения человека. Основанная на полях система управления крутящим моментом определяет потенциальное поле, представляющее собой коридор движения для транспортного средства вдоль номинальной траектории, которая должна быть пройдена транспортным средством. Система определяет положение транспортного средства относительно потенциального поля в текущий момент времени. «Положение транспортного средства» включает в себя по меньшей мере положение транспортного средства в конкретный момент времени и может дополнительно включать в себя дополнительную информацию, относящуюся к транспортному средству, такую как направление перемещения транспортного средства, скорость транспортного средства, ускорение транспортного средства и т.д. в конкретный момент времени. Система определяет на основании положения транспортного средства относительно потенциального поля крутящий момент, который должен быть приложен к рулевой колонке транспортного средства. Потенциальное поле включает в себя потенциал притяжения, который направляет транспортное средство так, чтобы оно оставалось в пределах коридора.
[0014] Как показано результатами испытаний, такая основанная на полях система управления крутящим моментом может приводить к подобному отслеживанию, как системы управления углом поворота рулевого колеса (SWA), которые в настоящее время разрабатываются для автономных транспортных средств, при этом используя меньшее количество работы (измеренное в Джоулях) для рулевого управления транспортным средством. Это может обеспечивать восприятие движения, которое ощущается более естественно, подобно тому, когда транспортное средство управляется человеком.
Примерные элементы системы
[0015] Примерное транспортное средство 10, включающее в себя компьютер 12, запрограммированный с возможностью использования потенциальных полей и управления крутящим моментом для рулевого управления транспортным средством 10, показано на Фигуре 1. Транспортное средство 10 включает в себя компьютер 12, память, которая хранит файл 16 определения дорожной сети (RNDF), одно или более устройств 14 сбора данных, пользовательский интерфейс 18 и один или более контроллеров 20. Транспортное средство 10 в общем представляет собой наземное транспортное средство, имеющее три или более колес, например, пассажирское транспортное средство, грузовой автомобиль малой грузоподъемности и т.д. Транспортное средство 10 имеет переднюю часть, заднюю часть, левую сторону и правую сторону, причем выражения передний, задний, левый и правый понимаются с позиции водителя транспортного средства 10, сидящего на сиденье водителя в стандартном рабочем положении, т.е. лицом к рулевому колесу.
[0016] Компьютер 12 транспортного средства 10 в общем включает в себя процессор и память, причем память включает в себя одну или более форм компьютерно-читаемого носителя и хранит инструкции, исполняемые процессором для выполнения различных операций, включая раскрытые здесь. Дополнительно компьютер 12 транспортного средства 10 может включать в себя и/или быть соединен с возможностью сообщения с одним или более другими вычислительными устройствами, встроенными в транспортное средство 10 для мониторинга и/или управления различными компонентами транспортного средства, например, электронные блоки управления (ECU), такие как контроллеры 20. Компьютер 12 транспортного средства 10 в общем запрограммирован и выполнен с возможностью связи по шине локальной сети контроллеров (CAN) или т.п.
[0017] Компьютер 12 транспортного средства 10 также может иметь соединение с бортовым диагностическим разъемом (OBD II), шиной CAN (локальная сеть контроллеров) и/или другими проводными или беспроводными механизмами. Посредством одного или более таких механизмов связи компьютер 12 может передавать сообщения различным устройствам в транспортном средстве 10 и/или принимать сообщения от различных устройств, например, приводов, датчиков и т.д. включая устройства 14 сбора данных и контроллеры 20. Альтернативно или дополнительно, в случаях, когда транспортное средство 10 фактически содержит множество устройств, шина CAN или т.п. может быть использована для связи между устройствами, представленными в виде компьютера 12 в этом раскрытии. В дополнение, компьютер 12 может быть выполнен с возможностью связи с другими устройствами посредством различных проводных и беспроводных сетевых технологий, например, сотовой связи, Bluetooth, универсальной последовательной шины (USB), проводных и/или беспроводных пакетных сетей и т.д.
[0018] Память компьютера 12 в общем хранит собранные данные. Собранные данные могут включать в себя множество данных, собранных в компьютере 12 устройствами 14 сбора данных и/или получаемых от них. Собранные данные могут дополнительно включать в себя данные, принимаемые посредством связи, например, с источниками, внешними по отношению к транспортному средству 10. Примеры собранных данных могут включать в себя данные, относящиеся к транспортному средству 10, такие как местоположение объектов, тип объектов, местоположение и скорость других транспортных средств, дорожные элементы и т.д. в области, в которой перемещается транспортное средство 10. Собранные данные могут дополнительно включать в себя данные, относящиеся к состоянию транспортного средства, такие как скорость транспортного средства 10, направление перемещения транспортного средства 10, крутящий момент, приложенный к рулевой колонке, скорость вращения двигателя и т.д. Дополнительно данные могут включать в себя, например, данные о местоположении, принимаемые от системы глобального позиционирования (GPS), или данные карты области, в которой перемещается или планирует перемещение транспортное средство 10. В общем собранные данные могут включать в себя любые данные, которые могут быть собраны устройствами 14 сбора данных, приняты посредством связи между транспортными средствами (V2V) или между транспортным средством и инфраструктурой (V2I), приняты посредством спутниковой связи, собраны или приняты от других источников и/или вычислены из таких данных.
[0019] Компьютер 12 может быть дополнительно запрограммирован с возможностью сбора данных, относящихся к целям транспортного средства 10, и других данных, относящихся к транспортному средству 10. В данном контексте «цель» транспортного средства 10 относится к целям поездки, таким как конечное место назначения, промежуточные места назначения, маршрут перемещения, предпочтительное время прибытия, используемый стиль вождения (консервативный, спортивный) и т.д.
[0020] Например, компьютер 12 может принимать входные данные от пользователя посредством пользовательского интерфейса 18, указывающие место назначения пользователя и маршрут, который пользователь хотел бы использовать. На основании собранных данных, как описано ниже, компьютер 12 может планировать номинальную траекторию до желаемого места назначения с точки зрения направлений движения на дорожной карте. Компьютер 12 может дополнительно определять коридор допустимого отклонения вокруг номинальной траектории. На основании определенного коридора компьютер 12 может определять и отправлять команды контроллерам 20 транспортного средства для управления транспортным средством 10 для перемещения по номинальной траектории и в пределах коридора путем регулировки крутящего момента, прикладываемого к рулевой колонке транспортного средства.
[0021] В общем каждый контроллер 20 может включать в себя процессор, запрограммированный с возможностью приема инструкций от транспортного средства 10, исполнения инструкций и отправки сообщений компьютеру 12. Электронный блок управления (ECU), например, уже известный, и, кроме того, запрограммированный для работы, как описано здесь, представляет собой пример контроллера 20. Дополнительно каждый из контроллеров 20 может включать в себя или быть соединен с возможностью сообщения с приводом или т.п., который обеспечен для приведения в действие компонента транспортного средства, например, тормоза, рулевого колеса, дросселя и т.д. Например, контроллер 20 крутящего момента может включать в себя процессор и двигатель для приложения крутящего момента к рулевой колонке. В этом примере при приеме инструкции от компьютера 12 процессор может приводить в действие двигатель для того, чтобы регулировать рулевое управление транспортного средства 10.
[0022] Дополнительно каждый из контроллеров 20 может включать в себя датчики или иначе работает в качестве устройств 14 сбора данных для обеспечения данных компьютеру 12, относящихся к скорости транспортного средства 10, углу поворота высоте подвески и т.д. Например, контроллер 20 крутящего момента может отправлять данные компьютеру 12, соответствующие крутящему моменту, приложенному к рулевой колонке.
[0023] Устройства 14 сбора данных могут включать в себя множество устройств. Например, устройства 14 сбора данных могут включать в себя лидар, радиолокатор, видеокамеры, ультразвуковые датчики, инфракрасные датчики для считывания среды. Устройства 14 сбора данных могут дополнительно включать в себя компоненты, которые динамически собирают данные о транспортном средстве 10, такие как скорость, скорость рыскания, угол поворота и т.д. Дополнительно вышеупомянутые примеры не предназначены для ограничения. Другие типы устройств 14 сбора данных, например, акселерометры, гироскопы, датчики давления, термометры, барометры, высотомеры и т.д. могут быть использованы для обеспечения данных транспортному средству 10.
[0024] Файл 16 определения дорожной сети (RNDF) может включать в себя зашифрованные топологические метрические карты дорожных сетей, где может перемещаться транспортное средство 10. Топологические метрические карты включают в себя координаты широты и долготы для дорожных элементов и других объектов в среде и зашифрованы на основании производного формата файла RNFD. RNDF 16 может обеспечивать данные карты, например, компьютеру 12.
[0025] Транспортное средство 10 может дополнительно включать в себя пользовательский интерфейс 18, который может быть встроен или соединен с возможностью сообщения с компьютером 10. Пользовательский интерфейс 18 может быть использован, например, для приема входных данных от пользователя, относящихся к желаемому месту назначения транспортного средства 10, желаемому маршруту для использования и т.д. Интерфейс 18 может включать в себя одно или более устройств вывода, таких как дисплей, динамики и т.д. для сообщения информации пользователю. Интерфейс 18 может дополнительно включать в себя одно или более устройств ввода, таких как дисплей с сенсорным экраном, клавиатура, устройство распознавания жестов, переключатели и т.д., для приема входных данных от пользователя.
Процессы
[0026] Основанная на полях система управления крутящим моментом для управления транспортным средством 10 по номинальной траектории 30 может включать в себя коридор 32 вокруг траектории 30 и контроллер 20 рулевого управления, который использует основанное на крутящем моменте взаимодействие. Коридор 32 может состоять из потенциальных полей 34, которые направляют транспортное средство 10 по номинальной траектории 30. Потенциальные поля 34 могут включать в себя компонент рулевого управления, который направляет транспортное средство 10 к номинальной траектории 30, и компонент препятствий, который направляет транспортное средство 10 от препятствий, например, неподвижных объектов, других транспортных средств и т.д., в пределах заданного расстояния от номинальной траектории 30. Заданное расстояние может быть определено, например, в пределах фиксированного поперечного расстояния, например, 20 метров, от номинальной траектории. В качестве другого примера заданное расстояние может быть определено в пределах коридора, представленного потенциальным полем. В качестве другого примера заданное расстояние может представлять собой расстояние, связанное с состоянием транспортного средства (положение, скорость, ускорение и т.д.) и/или связанное с условиями среды (тип дороги, погодные условия и т.д.). Контроллер 20 рулевого управления может прикладывать крутящий момент к рулевой колонке, который определяется на основании положения и/или будущего прогнозируемого положения транспортного средства 10 относительно потенциального поля 34.
Построение потенциального поля
[0027] Потенциальное поле 34 для представления коридора 32 движения транспортного средства 10 может быть построено с помощью функции потенциальной энергии 

где  представляет собой точку на двумерной плоскости транспортного средства 10,
представляет собой точку на двумерной плоскости транспортного средства 10,  представляет собой потенциал притяжения, который направляет транспортное средство 10 к номинальной траектории 30, а
представляет собой потенциал притяжения, который направляет транспортное средство 10 к номинальной траектории 30, а  представляет собой потенциал отталкивания, который направляет транспортное средство 10 от препятствий в окружающей среде. Задача транспортного средства 10 заключается в минимизации энергии этого потенциала путем подачи команды для ввода рулевого крутящего момента на основании отрицательного градиента потенциального поля:
представляет собой потенциал отталкивания, который направляет транспортное средство 10 от препятствий в окружающей среде. Задача транспортного средства 10 заключается в минимизации энергии этого потенциала путем подачи команды для ввода рулевого крутящего момента на основании отрицательного градиента потенциального поля:

[0028] Потенциал притяжения может быть образован вокруг номинальной траектории 30, например, центр полосы движения при перемещении, который может быть получен, например, из существующей карты дорожной сети или с использованием известного планировщика движения. Учитывая номинальную траекторию 30  как последовательность
как последовательность  двумерных точек маршрута =
двумерных точек маршрута = ,…,
,…, , потенциалы притяжения
, потенциалы притяжения  могут быть рассмотрены для всех точек
могут быть рассмотрены для всех точек  в локальной окрестности транспортного средства 10 в виде
в локальной окрестности транспортного средства 10 в виде

где  представляет собой расстояние от точки до ближайшего сегмента номинальной траектории 30 П. Эмпирически определено, что квадратичный потенциал, т.е. i=2 обеспечивает достаточную возможность управления для рулевого управления транспортным средством 10 по номинальной траектории 30, тогда как линейный потенциал (i=1) требует высокого пропорционального коэффициента усиления на системе управления с обратной связью, приводя к нестабильности. Дополнительно определено, что более высокие порядки (i>2) по существу не обеспечивают улучшенную производительность по сравнению с квадратичным потенциалом. На основании этого упрощения потенциал может быть определен в виде
представляет собой расстояние от точки до ближайшего сегмента номинальной траектории 30 П. Эмпирически определено, что квадратичный потенциал, т.е. i=2 обеспечивает достаточную возможность управления для рулевого управления транспортным средством 10 по номинальной траектории 30, тогда как линейный потенциал (i=1) требует высокого пропорционального коэффициента усиления на системе управления с обратной связью, приводя к нестабильности. Дополнительно определено, что более высокие порядки (i>2) по существу не обеспечивают улучшенную производительность по сравнению с квадратичным потенциалом. На основании этого упрощения потенциал может быть определен в виде
[0029] Потенциал поля в Уравнении 4 исключает локальные минимумы, имея нулевую центральную линию, является выпуклым относительно поперечного смещения относительно номинальной траектории 30 и позволяет прямое вычисление производных даже в пределах областей препятствий.
[0030] Подобным образом квадратичный потенциал  может быть использован в непосредственной близости от препятствий. Путем сложения потенциалов притяжения и отталкивания может быть получен общий потенциал . Согласно Уравнению 2 функция потенциала определена как отрицательная норма градиента потенциального поля и задана в виде
может быть использован в непосредственной близости от препятствий. Путем сложения потенциалов притяжения и отталкивания может быть получен общий потенциал . Согласно Уравнению 2 функция потенциала определена как отрицательная норма градиента потенциального поля и задана в виде

[0031] Потенциальное поле 34 специально построено для управления контроллером 20 рулевого управления транспортного средства (исключая продольное управление). Вырожденный случай, в котором коридор 32 движения полностью заблокирован препятствиями, может быть обработан контроллером 20 продольного перемещения, подающим команду транспортному средству 10 для остановки при обнаружении, что коридор 32 движения полностью заблокирован.
Основанное на крутящем моменте рулевое управление
[0032] На основании эмпирических испытаний определено, что пропорционально-дифференциальный (PD) контроллер с обратной связью является достаточным для стабилизации основанной на полях системы управления крутящим моментом для транспортного средства 10. PD-контроллер может подавать команду крутящего момента контроллеру 20 как функцию от потенциального поля 34. Задача управления заключается в рулевом управлении транспортным средством 10 в соответствии с потенциальной функцией в Уравнении 5.
[0033] Конкретнее, входная переменная для контроллера 20 представляет собой потенциальную функцию, оцененную в точке  , находящейся в прогнозируемом времени L в будущем
, находящейся в прогнозируемом времени L в будущем  , где
, где  представляет собой положение центра задней оси транспортного средства 10 в момент времени t. Соответственно команда крутящего момента в момент времени t задана в виде
представляет собой положение центра задней оси транспортного средства 10 в момент времени t. Соответственно команда крутящего момента в момент времени t задана в виде
 +
+
где представляет собой пропорциональный коэффициент усиления, а представляет собой дифференциальный коэффициент усиления (настраиваемые параметры). Прогнозируемое время L может представлять собой фиксированное время, например, 50 мс. Альтернативно прогнозируемое время может быть определено на основании данных, относящихся к транспортному средству 10, таких как скорость транспортного средства, и/или данных, относящихся к среде, таких как тип дороги для перемещения, интенсивность дорожного движения, погодные условия и т.д.
[0034] Схема основанной на полях системы 40 управления крутящим моментом показана на Фигуре 3. Как описано выше, транспортное средство 10 включает в себя компьютер 12 и один или более контроллеров 20. Компьютер 12 запрограммирован с возможностью определения команды крутящего момента на основании градиента потенциала, как описано в Уравнении 6. Компьютер 12 подает команду крутящего момента одному или более контроллерам 20. Один или более контроллеров 20 включают в себя контроллер 20 управления крутящим моментом. Контроллер управления крутящим моментом регулирует крутящий момент, прикладываемый к рулевой колонке транспортного средства 10, тем самым регулируя направление перемещения транспортного средства 10.
[0035] Транспортное средство 10 продолжает перемещение в пределах потенциального поля 34. На основании положения x транспортного средства 10 в пределах потенциального поля 34 обновленный градиент потенциала обеспечивается в качестве входных данных компьютеру 12 транспортного средства 10.
Блок схема примерного процесса
[0036] Фигура 4 представляет собой схему примерного процесса 400 для управления транспортным средством 10 с использованием основанной на полях системы 40 управления крутящим моментом. Процесс 400 начинается в блоке 405.
[0037] В блоке 405 компьютер 12 принимает и/или обновляет данные о траектории для транспортного средства 10. Например, в начале поездки водитель транспортного средства 10 может вводить данные о месте назначения для поездки посредством пользовательского интерфейса 18. Компьютер 12 на основании данных о месте назначения может, например, извлекать карты из файла 16 определения маршрутной сети (RNDF). Компьютер 12 может дополнительно извлекать данные о текущем местоположении, например, из системы глобального позиционирования (GPS). На основании данных о месте назначения, извлеченных карт и данных о текущем местоположении компьютер 12 может определять номинальную траекторию 30 для транспортного средства 10, как известно. Компьютер 12 может дополнительно определять известные препятствия, например, поврежденные участки дороги, строительные площадки и т.д., вдоль номинальной траектории. Данные о препятствиях могут быть извлечены из RNDF 16, приняты от GPS, приняты посредством связи между транспортным средством и инфраструктурой (V2I), приняты посредством связи между транспортными средствами (V2V) и т.д. Процесс 400 продолжается в блоке 410.
[0038] В блоке 410 компьютер 12 может определять потенциальное поле 34 вдоль номинальной траектории 30, как описано выше. Процесс 400 продолжается в блоке 415.
[0039] В блоке 415 компьютер определяет положение транспортного средства 10 в пределах потенциального поля 34. Положение может включать в себя текущее положение транспортного средства 10, текущую скорость, текущее направление перемещения, текущее ускорение и т.д. Компьютер 12 может использовать по меньшей мере частично данные GPS для определения положения транспортного средства 10. Компьютер 12 может дополнительно использовать данные от устройств 14 сбора данных, данные от контроллеров 20 и т.д. для определения положения транспортного средства 10. Процесс продолжается в блоке 420.
[0040] В блоке 420 компьютер 12 прогнозирует на основании положения в текущий момент времени будущее положение транспортного средства после предварительно заданного прогнозируемого времени. Как описано выше, заданное прогнозируемое время может представлять собой фиксированное время, например, 50 миллисекунд (мс). Альтернативно заданное прогнозируемое время может быть основано на данных, относящихся к транспортному средству 10, таких как скорость транспортного средства, или данных, относящихся к среде перемещения, таких как тип дороги, интенсивность дорожного движения, погодные условия и т.д.
[0041] Как описано выше, компьютер 12 может прогнозировать будущее положение как равное текущему положению плюс смещение, равное произведению текущей скорости и прогнозируемого времени вдоль текущего направления перемещения. Процесс продолжается в блоке 430.
[0042] В блоке 430 компьютер 12 вычисляет крутящий момент для приложения к рулевой колонке. Как описано выше, компьютер 12 вычисляет функцию потенциала потенциального поля 34 на основании Уравнения 5.

Далее компьютер вычисляет крутящий момент для приложения к рулевой колонке на основании Уравнения 6.
+
Далее процесс 400 продолжается в блоке 435.
[0043] В блоке 435 компьютер 12 отправляет инструкцию контроллерам 20 и, в частности, контроллеру 20 управления крутящим моментом. Контроллер управления крутящим моментом регулирует крутящий момент, прикладываемый к рулевой колонке транспортного средства 10. Транспортное средство 10 продолжает перемещение по номинальной траектории 30. Процесс 400 продолжается в блоке 440.
[0044] В блоке 440 компьютер 12 принимает решение, следует ли продолжать процесс 400. Например, транспортное средство 10 может продолжать перемещение по номинальной траектории 30 и все еще не прибыть в место назначения. В этом случае процесс 400 продолжается в блоке 445.
[0045] Альтернативно, транспортное средство 10 может, например, прибыть в место назначения, принять входные данные посредством пользовательского интерфейса 18 о том, что транспортное средство 10 должно остановиться, принять инструкции от водителя для перехода на ручное управление и т.д. В таких случаях компьютер 12 может определять, что процесс 400 следует завершить.
[0046] В блоке 445 компьютер 12 определяет, необходимо ли обновить данные о траектории. Например, компьютер 12 может принимать входные данные от водителя посредством пользовательского интерфейса 18 о том, что транспортное средство 10 следует направить в новое место назначения или следовать по другому маршруту. Альтернативно транспортное средство 10 может следовать по номинальной траектории 30, но может быть необходимо обновить данные карты для учета продвижения по номинальной траектории 30. Еще дополнительно транспортное средство 10 может обнаружить препятствие вдоль номинальной траектории 30 и должно обновить данные карты для включения препятствия. В таких случаях процесс 400 может продолжаться в блоке 405.
[0047] В других случаях продвижение по номинальной траектории 30 может быть инкрементальным, и может не быть текущей необходимости обновления данных карты. В этом случае процесс 400 может продолжаться в блоке 415.
Экспериментальная установка
Испытательная трасса
[0048] Испытываемое автономное транспортное средство оборудовано основанной на полях системой 40 управления крутящим моментом, как описано выше, и испытывается с использованием испытательных поверхностей области динамики транспортного средства (VDA), трассы с поворотами и наклонами (SHC) и низкоскоростной прямолинейной трассы (LSSA). VDA обеспечивает открытую поверхность с покрытием для выполнения испытаний рулевого управления в свободной форме. SHC состоит из узкой двухполосной дороги с крутыми поворотами и выраженными изменениями наклона. LSSA состоит из двухполосной кольцевой дороги с двумя длинными прямыми участками.
Испытываемое транспортное средство
[0049] Автономное транспортное средство, используемое для экспериментов, оборудовано системой «управления по проводам», оснащенного интерфейсом рулевого управления, который может быть выполнен с возможностью приема запросов крутящего момента, как описано выше. Интерфейс рулевого управления может альтернативно быть выполнен с возможностью приема запросов угла поворота рулевого колеса (SWA), сопоставимых с системами, известными в настоящее время для автономных транспортных средств. Оснащение транспортного средства 10 обоими типами систем рулевого управления позволяет сравнение производительности двух типов рулевого управления в пределах одного испытываемого транспортного средства 10.
[0050] Испытываемое транспортное средство оборудовано четырьмя трехмерными лидарными сканерами Velodyne HDL-32E, инерционной навигационной системой (INS) Applanix POS-LV 420, GPS и несколькими другими датчиками. Кластер из пяти бортовых компьютеров в испытываемом транспортном средстве выполняет все планирование, управление и восприятие для системы по существу в реальном времени. В частности, предложенный основанный на полях подход к управлению крутящим моментом при рулении работает на борту испытываемого транспортного средства на частоте 20Гц.
[0051] Испытываемое транспортное средство использует карты области, в которой оно перемещается, которые отражают информацию о среде, такую как коэффициент отражения лидара и высота дороги и используются для локализации, обнаружения препятствий и других задачи восприятия. Дорожная сеть зашифрована в виде метрической топологической карты с использованием производного формата файла определения маршрутной сети (RNDF), обеспечивая информацию о местоположении и связности дорожных сегментов и полос движения на них. Желаемые траектории перемещения могут быть получены путем применения этого предварительного знания.
[0052] Оценки по состояниям других участников дорожного движения обеспечиваются динамическим устройством слежения за объектами, работающим на транспортном средстве, которое использует лидарные измерения дальностей, как известно. Геометрия и местоположение неподвижных препятствий также выводятся на борту с использованием лидарных измерений.
Результаты испытаний
[0053] Результаты оценки для испытываемого автономного транспортного средства, оборудованного испытываемой основанной на полях системой управления крутящим моментом, представлены ниже. Сначала прямолинейные маневры и маневры рулевого управления в свободной форме с увеличением кривизны выполнялись на поверхности VDA. Эти испытания были выполнены на низкой скорости ( 4 м/с). Несколько испытательных заездов далее были выполнены на SHC при движении со скоростями до 7 м/с. Наконец, несколько испытательных заездов были выполнены с маневрами, включающими наличие препятствий (т.е. включающими потенциальные поля с компонентами препятствий) снова на VDA на более низких скоростях.
4 м/с). Несколько испытательных заездов далее были выполнены на SHC при движении со скоростями до 7 м/с. Наконец, несколько испытательных заездов были выполнены с маневрами, включающими наличие препятствий (т.е. включающими потенциальные поля с компонентами препятствий) снова на VDA на более низких скоростях.
Начальные испытания
[0054] Сначала несколько заездов с рулевым управлением в свободной форме были выполнены на поверхности VDA и следуя по прямолинейной траектории на LSSA. Основанная на полях система управления крутящим моментом успешно управляла испытываемым транспортным средством вдоль номинальной траектории с использованием соответственного потенциального поля. Номинальная траектория включала несколько различных поворотов, и все были отслежены на постоянной продольной скорости 4 м/с.
[0055] Фигура 2, рассмотренная ранее, иллюстрирует один результат испытания. Как может быть видно, испытываемое транспортное средство, подвергается смещению от нулевой кривой потенциального поля (вдоль номинальной траектории). Однако это допустимая зона потенциального поля для перемещения испытываемого транспортного средства, что позволяет испытываемому транспортному средству перемещаться по кривой, следуя по плавной кривой, используя преимущество допустимых отклонений от номинальной траектории.
Трасса с поворотами и наклонами
[0056] Испытания были выполнены на SHC для испытания основанной на полях системы управления крутящим моментом и для сравнения ее с основанным на угле поворота рулевого колеса (SWA) контроллером рулевого управления, следующего по той же номинальной траектории вдоль трассы. Основанный на угле поворота рулевого колеса (SWA) контроллер использует кинематическую модель испытываемого транспортного средства для подачи значения угла поворота рулевого колеса (SWA) для отслеживания номинальной траектории 30 с минимальной ошибкой бокового отклонения, работая подобно алгоритму отслеживания траектории методом погони. Производительность основанной на полях системы управления крутящим моментом сравнивается с контроллером угла поворота рулевого колеса (SWA) с точки зрения крутящего момента, прикладываемого к системе рулевого управления и с точки зрения ошибки отслеживания траектории и усилия управления.
[0057] Фигура 5 иллюстрирует испытательную траекторию, по которой следует испытываемое транспортное средство в одном из экспериментальных заездов. Фигура 6 показывает производительность основанной на полях системы управления крутящим моментом с точки зрения входного сигнала на контроллер,  , и выходной мощности (крутящий момент, прикладываемый к системе рулевого управления). В отличие от этого Фигура 7 иллюстрирует крутящий момент, прикладываемый основанным на угле поворота рулевого колеса (SWA) контроллером.
, и выходной мощности (крутящий момент, прикладываемый к системе рулевого управления). В отличие от этого Фигура 7 иллюстрирует крутящий момент, прикладываемый основанным на угле поворота рулевого колеса (SWA) контроллером.
[0058] Можно заметить, что основанная на полях система управления крутящим моментом создает некоторые низкочастотные колебания в сигнале крутящего момента, но поведение при рулевом управлении с позиции водителя качественно не отличается от типичной манеры вождения человека. Наоборот, в результате жесткой блокировки колеса под определенным углом основанный на угле поворота рулевого колеса (SWA) контроллер прикладывает очень высокочастотный крутящий момент к системе рулевого управления.
[0059] Количественное сравнение производительности основанной на полях системы управления крутящим моментом и основанного на SWA контроллера с точки зрения ошибки отслеживания траектории и усилия управления представлены ниже. Ошибка отслеживания траектории вычисляется как знаковое расстояние между положением транспортного средства и ближайшим сегментом номинальной траектории, и является положительной, если транспортное средство находится справа от траектории и отрицательной в противном случае. Усилие управления задано как количество работы, выполняемой приводом:

где  представляет собой крутящий момент, прикладываемый к системе рулевого управление транспортного средства в момент времени
представляет собой крутящий момент, прикладываемый к системе рулевого управление транспортного средства в момент времени  ,
,  и
и  представляют собой начальный и конечный моменты работы соответственно, а
представляют собой начальный и конечный моменты работы соответственно, а  представляет собой угол поворота рулевой колонки.
представляет собой угол поворота рулевой колонки.
[0060] Фигура 8а показывает ошибку отслеживания траектории вдоль типичной испытательной трассы для испытываемой системы управления крутящим моментом, а Фигура 8b показывает ошибку отслеживания траектории вдоль той же траектории для основанного на SWA контроллера. Фигура 9 показывает усилие управления. Из-за различных продольных скоростей траектории имеют различные продолжительности: траектория, проделанная основанным на крутящем моменте контроллером длится 255 с, а траектория, проделанная основанным на SWA контроллером, длится 160 секунд (с). Однако номинальная траектория 30 является одинаковой для обоих контроллеров, и в связи с этим испытание ставит одну и ту же задачу для обоих подходов с точки зрения рулевого управления.
[0061] Что касается ошибки отслеживания траектории, оба контроллера обеспечивают одинаковую производительность, работая с точностью в пределах 30 см для большей части траектории. Основанная на полях система управления крутящим моментом показывает заметный пик ошибки отслеживания чуть менее 90 сантиметров (см) на половине траектории, при прохождении крутого поворота малого радиуса. Это происходит, так как очень большое усилие рулевого управления требуется в этой области. Основанная на полях система управления крутящим моментом оптимизирует точность отслеживания для более плавного поведения при рулевом управлении. Однако основанный на SWA контроллер подобным образом показывает высокие пики ошибки значительно выше 60 см.
[0062] Однако, что касается усилия крутящего момента, основанная на полях система управления крутящим моментом аккумулирует приблизительно 1500 Дж (Джоулей) во время заезда. Основанный на SWA контроллер требует более 4500 Дж работы. Эта существенная разница свидетельствует о более плавном поведении при рулевом управлении основанной на крутящем моменте системы управления.
Включение препятствий в потенциальное поле
[0063] Как рассмотрено выше, препятствия могут быть включены как потенциал отталкивания при построении потенциального поля. Это может исключить необходимость точного вычисления/обновления номинальной траектории для включения определенного препятствия. Фигура 10 иллюстрирует испытательную трассу поверхности VDA, где неподвижное препятствие находится слева от номинальной траектории транспортного средства. Компьютер 12 определяет первое потенциальное поле 34а вокруг номинальной траектории, как описано выше. Компьютер 12 дополнительно определяет второе потенциальное поле 34b вокруг неподвижного объекта. Объединенные потенциальные поля 34а, 34b позволяют транспортному средству 10 плавно преодолевать препятствие вдоль пройденной траектории 31.
Заключение
[0064] В данном контексте, наречие «по существу» означает, что форма, конструкция, измерение, количество, время и так далее могут отклоняться от точно описанной геометрии, расстояния, измерения, количества, времени и т.д., вследствие недостатков материалов, обработки, изготовления и т.д.
[0065] Выражение «примерный» используется в смысле обозначения примера, например, ссылку на «примерное приспособление» следует читать, как просто ссылку на пример приспособления.
[0066] Каждое из вычислительных устройств, например, рассмотренных здесь, в общем включает в себя инструкции, исполняемые одним или более вычислительными устройствами, например, указанными выше, для выполнения описанных выше блоков или этапов процессов. Например, рассмотренные выше блоки процесса могут быть осуществлены как исполняемые компьютером инструкции.
[0067] Исполняемые компьютером инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включая, без ограничения и либо отдельно, либо в сочетании Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д., и исполняет эти инструкции, тем самым выполняя один или более процессов, включая один или более описанных здесь процессов. Такие инструкции и другие данные могут храниться и передаваться с использованием множества компьютерно-читаемых носителей. Файл в вычислительном устройстве в общем представляет собой совокупность данных, хранящихся на компьютерно-читаемом носителе, например, носителе данных, оперативном запоминающем устройстве и т.д.
[0068] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в обеспечении данных (например, инструкций), которые могут быть считаны компьютером. Такой носитель может принимать многие формы, включая, но не ограничиваясь, энергонезависимый носитель, энергозависимый носитель и т.д. Энергонезависимый носитель включает в себя, например, оптический или магнитный диски и другую постоянную память. Энергозависимый носитель включает в себя динамическое оперативное запоминающее устройство (DRAM), которое обычно представляет собой оперативную память. Общие формы компьютерно-читаемого носителя включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационные карты, бумажные ленты, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любой другой чип или картридж памяти или любой другой носитель, который компьютер может считывать.
[0069] На чертежах, одинаковые ссылочные позиции обозначают одинаковые элементы. Дополнительно некоторые или все из этих элементов могут быть изменены. В отношении носителя, процессов, систем, способов и т.д., описанных здесь, следует понимать, что хотя этапы таких процессов и т.д. описаны как происходящие согласно определенной упорядоченной последовательности, такие процессы могут быть осуществлены с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного здесь. Дополнительно следует понимать, что определенные этапы могут быть выполнены одновременно, что другие этапы могут быть добавлены, или, что описанные здесь определенные этапы могут быть опущены. Другими словами, описания процессов здесь обеспечены в целях иллюстрации конкретных вариантов выполнения, и не должны никоим образом толковаться так, чтобы ограничивать заявленное изобретение.
[0070] Соответственно, следует понимать, что приведенное выше описание предназначено для иллюстрации, а не ограничения. Многие варианты выполнения и применения, отличные от обеспеченных примеров, будут понятны специалисту в области техники при прочтении приведенного выше описания. Объем охраны изобретения должен быть определен не со ссылкой на приведенное выше описание, а со ссылкой на приложенную формулу изобретения вместе с полным объемом охраны эквивалентов, на которые такая формула изобретения имеет право. Ожидается и предполагается, что будущие разработки будут возникать в рассмотренном здесь уровне техники, и что раскрытые системы и способы будут включены в такие будущие варианты выполнения. В итоге, следует понимать, что изобретение может быть преобразовано и изменено и ограничено только следующей далее формулой изобретения.
[0071] Все выражения, используемые в формуле изобретения, предназначены для приведения их общепринятых и обычных значений, которые понятны специалисту в области техники, кроме тех случаев, когда здесь явно указано обратное. В частности, использование единственного числа и выражения «упомянутый» следует читать как перечисление одного или более указанных элементов, кроме тех случаев, когда пункт формулы изобретения явным образом указывает обратный случай.







Изобретение относится к транспортным средствам. Система управления крутящим моментом рулевой колонки содержит компьютер, включающий в себя процессор и память. Память хранит инструкции, исполняемые процессором так, что компьютер определяет вдоль номинальной траектории, предназначенной для проезда транспортным средством, потенциальное поле, представляющее собой коридор движения для транспортного средства. Потенциальное поле включает в себя потенциал притяжения, который направляет транспортное средство так, чтобы оно оставалось в пределах коридора. Компьютер идентифицирует первое положение транспортного средства относительно потенциального поля в текущий момент времени, вычисляет крутящий момент для приложения к рулевой колонке на основании первого положения относительно потенциального поля и прикладывает крутящий момент к рулевой колонке транспортного средства. Повышается комфорт при движении. 2 н. и 22 з.п. ф-лы, 10 ил.
1. Система управления крутящим моментом рулевой колонки, содержащая компьютер, включающий в себя процессор и память, причем память хранит инструкции, исполняемые процессором так, что компьютер запрограммирован с возможностью:
определения вдоль номинальной траектории, предназначенной для проезда транспортным средством, потенциального поля, представляющего собой коридор движения для транспортного средства, причем потенциальное поле включает в себя потенциал притяжения, который направляет транспортное средство так, чтобы оно оставалось в пределах коридора;
идентификации первого положения транспортного средства относительно потенциального поля в текущий момент времени;
вычисления крутящего момента для приложения к рулевой колонке по меньшей мере частично на основании первого положения относительно потенциального поля; и
приложения крутящего момента к рулевой колонке транспортного средства.
2. Система по п. 1, в которой компьютер запрограммирован с возможностью увеличения потенциала притяжения, когда первое расстояние от первого положения до номинальной траектории увеличивается.
3. Система по п. 2, в которой первое отношение между потенциалом притяжения и первым расстоянием является квадратичным.
4. Система по п. 1, в которой потенциальное поле определено так, что номинальная траектория находится в непосредственном центре потенциального поля вдоль направления перемещения.
5. Система по п. 1, в которой компьютер дополнительно запрограммирован с возможностью:
идентификации второго положения относительно потенциального поля, причем второе положение указывает прогнозируемое будущее положение транспортного средства в первый предварительно заданный период времени после текущего момента времени, причем определение крутящего момента, подлежащего приложению к рулевой колонке транспортного средства, по меньшей мере частично основано на втором положении.
6. Система по п. 5, в которой прикладываемый крутящий момент определен частично на основании первого направления перемещения транспортного средства и первой скорости транспортного средства, и компьютер дополнительно запрограммирован с возможностью вычисления второго положения, равного первому положению плюс первое смещение, равное произведению первой скорости и первого предварительно заданного периода времени вдоль первого направления перемещения.
7. Система по п. 1, в которой потенциальное поле дополнительно включает в себя потенциал отталкивания, причем потенциал отталкивания направляет транспортное средство от объектов в пределах заданного расстояния от номинальной траектории.
8. Система по п. 7, в которой компьютер дополнительно запрограммирован с возможностью:
вычисления потенциала отталкивания на основании второго расстояния транспортного средства от объекта.
9. Система по п. 8, в которой потенциал отталкивания увеличивается, когда второе расстояние уменьшается.
10. Система по п. 7, в которой потенциальное поле представляет собой сумму поля потенциала притяжения и поля потенциала отталкивания.
11. Система по п. 1, в которой компьютер дополнительно запрограммирован с возможностью:
вычисления отрицательного градиента  ; и
; и
определения крутящего момента частично на основании отрицательного градиента;
где  представляет собой потенциальное поле в положении x на двумерной плоскости.
представляет собой потенциальное поле в положении x на двумерной плоскости.
12. Система по п. 11, в которой компьютер дополнительно запрограммирован с возможностью:
определения крутящего момента  , где:
, где:
 представляет собой отрицательный градиент потенциального поля в прогнозируемом будущем положении
представляет собой отрицательный градиент потенциального поля в прогнозируемом будущем положении  ;
;
t представляет собой текущий момент времени;
L представляет собой предварительно заданный период времени;
 представляет собой пропорциональный коэффициент усиления; и
представляет собой пропорциональный коэффициент усиления; и
 представляет собой дифференциальный коэффициент усиления.
представляет собой дифференциальный коэффициент усиления.
13. Способ управления крутящим моментом рулевой колонки, содержащий этапы, на которых:
определяют, посредством компьютера, вдоль номинальной траектории, предназначенной для проезда транспортным средством, потенциальное поле, представляющее собой коридор движения для транспортного средства, причем потенциальное поле включает в себя потенциал притяжения, который направляет транспортное средство так, чтобы оно оставалось в пределах коридора;
идентифицируют первое положение транспортного средства относительно потенциального поля в текущий момент времени;
вычисляют крутящий момент для приложения к рулевой колонке по меньшей мере частично на основании первого положения; и
прикладывают крутящий момент к рулевой колонке транспортного средства.
14. Способ по п. 13, в котором компьютер запрограммирован с возможностью увеличения потенциала притяжения, когда первое расстояние от первого положения до номинальной траектории увеличивается.
15. Способ по п. 14, в котором первое отношение между потенциалом притяжения и первым расстоянием является квадратичным.
16. Способ по п. 13, в котором потенциальное поле определено так, что номинальная траектория находится в непосредственном центре потенциального поля вдоль направления перемещения.
17. Способ по п. 13, дополнительно содержащий этап, на котором:
идентифицируют второе положение относительно потенциального поля, причем второе положение указывает прогнозируемое будущее положение транспортного средства в первый предварительно заданный период времени после текущего момента времени, причем определение крутящего момента, подлежащего приложению к рулевой колонке транспортного средства, по меньшей мере частично основано на втором положении.
18. Способ по п. 17, в котором прикладываемый крутящий момент определяют частично на основании первого направления перемещения транспортного средства и первой скорости транспортного средства, и компьютер дополнительно запрограммирован с возможностью вычисления второго положения, равного первому положению плюс первое смещение, равное произведению первой скорости и первого предварительно заданного периода времени вдоль первого направления перемещения.
19. Способ по п. 13, в котором потенциальное поле дополнительно включает в себя потенциал отталкивания, причем потенциал отталкивания направляет транспортное средство от объектов в пределах заданного расстояния от номинальной траектории.
20. Способ по п. 19, дополнительно содержащий этап, на котором:
вычисляют потенциал отталкивания на основании второго расстояния транспортного средства от объекта.
21. Способ по п. 20, в котором потенциал отталкивания увеличивается, когда второе расстояние уменьшается.
22. Способ по п. 19, в котором потенциальное поле представляет собой сумму поля потенциала притяжения и поля потенциала отталкивания.
23. Способ по п. 13, дополнительно содержащий этапы, на которых:
вычисляют отрицательный градиент ; и
определяют крутящий момент частично на основании отрицательного градиента;
где представляет собой потенциальное поле в положении x на двумерной плоскости.
24. Способ по п. 23, дополнительно содержащий этап, на котором:
определяют крутящий момент , где:
представляет собой отрицательный градиент потенциального поля в прогнозируемом будущем положении ;
t представляет собой текущий момент времени;
L представляет собой заданный период времени;
представляет собой пропорциональный коэффициент усиления; и
представляет собой дифференциальный коэффициент усиления.
| US 6393362 B1, 21.05.2002 | |||
| DE 102007061900 A1, 25.06.2009 | |||
| DE 112011103292 T5, 18.07.2013 | |||
| WO 2007143757 A2, 13.12.2007. |

