Изобретение относится к измерительной технике, в частности, к тензорезисторным датчикам деформации на основе тонкопленочных нано- и микроэлектромеханических систем и может быть использовано в различных биомедицинских устройствах, в том числе биодатчиках, тензодатчиках, эластомерах.
В медицинской практике необходимо контролировать движения различных частей тела: конечностей, суставов, грудной клетки, а также отеков, опухолей, деформацию мышечной ткани в рамках послеоперационной терапии. Для таких целей требуются многочисленные и разнообразные датчики деформации, то есть тензодатчики. Наиболее распространенным и простым является тип тензодатчиков, работающих на изменение сопротивления в зависимости от деформации - так называемые тензорезисторы. Тензочувствительность для тензорезистора определяется как S=(ΔR/R0)/ε, где R0 -начальное сопротивление, ΔR - абсолютное изменение сопротивления после деформации, относительная деформация 
 - начальная длина чувствительного элемента,
- начальная длина чувствительного элемента,  - абсолютное изменение его длины.
- абсолютное изменение его длины.
В основном коммерческие тензорезисторы создаются на базе металлических или полупроводниковых материалов. Тензорезисторы из металлической фольги в виде меандра обладают низким температурным коэффициентом сопротивления (α≤10-5 K-1), широким диапазоном измерения относительной деформации (ε=±5%), но имеют небольшую тензочувствительность S≤10, в то время как полупроводниковые тензорезисторы обладают высокой тензочувствительностью S~100-200, очень низкой относительной деформацией ε≤0,2% и большим температурным коэффициентом сопротивления α≥10-3 K-1, что является существенным недостатком [1]. Отметим, что оба типа тензорезисторов (металлические и полупроводниковые) являются недостаточно эластичными и сильно ограничивают движения биологического объекта. Это вызвано тем обстоятельством, что их модуль упругости (Е≥10 МПа) и максимальное значение относительной деформации (ε≤1%) сильно отличаются от параметров ткани живых организмов. Например, для человеческой кожи: Е≤220 кПа, ε≥10% [2]
Углеродные нанотрубоки (УНТ) обладают уникальными свойствами: высокая прочность, удельная проводимость, теплопроводность, оптическая прозрачность и др. В индивидуальном УНТ в качестве тензорезистора существует очень высокий потенциал получения рекордной тензочувствительности S~103÷104. Однако высокие S часто реализуются при очень низких деформациях (ε<<1%), что не приемлемо для использования подобных тензорезисторов в медицинской практике [3]. С другой стороны, установлено, что в тензорезисторе из композитного наноматериала содержащий УНТ параметр ε может быть расширен существенно (s~102 %), но тензочувствительность значительно (на 1÷2 порядок) меньше относительно значении S для индивидуальных УНТ. В композитном наноматериале из не проводящей матрицы (удельное сопротивление ≥1010 Ом⋅м) достигается более высокое значение S, когда концентрация УНТ минимальная [4]. Однако при небольшом количестве УНТ тензорезистор становится очень высокоомным (≥107 Ом), генерирующий интенсивные шумы и сложным при согласования в цепи измерения.
Тензорезистивный эффект в зависимости от технологии приготовления и состава наноматериала или усиливается, или подавляется. Действительно, слои композиционного наноматериала в составе карбоксилметилцеллюлозы и многостенных УНТ (МУНТ) обладают высокой удельной электропроводностью σ~104 S/m, S~10 и очень низким α≤10-5 K-1 [5]. В другом случае, слои в составе МУНТ с добавками AgNO3 (концентрация 2÷10 г/л), нанесенные на подложки из полидиметилсилоксана (ПДМС), имеют практически фиксированные значения сопротивления при многочисленных изгибах в диапазоне угла ±180°, и тензорезистивный эффект практический отсутствует, т.е. S~0 [6].
Пленка, изготовленная из МУНТ в качестве тензорезистора, показала практически линейную зависимость δR от ε, отсутствие гистерезиса при нагрузке и разгрузке, стабильность регистрируемого сигнала в течение 2 ч тестирования в небольших областях, ε≤10% и S ~ 7 [7]. Однако такой тензорезистор оказался чувствителен к различным газам, влажности и рабочей температуре, что ставит вопрос о необходимости его защиты от окружающей среды. Для тензорезистора на основе пленки из одностенных УНТ (ОУНТ), капсулированных в слое из ПДМС, получены значения S≤6,3, ε≤10% и хорошая влагаустойчивость относительно пленки без защитного слоя из ПДМС [8]. Несомненно, достигнутые показатели S и ε недостаточны для биомедицинских приложений.
Многие недостатки тензорезистора на основе пленки УНТ, капсулированых в слоях ПДМС, удалось исправить с использованием модифицированного ПДМС, так называемой силиконовой резины типа Ecoflex. В тензорезисторе УНТ/ПДМС-Ecoflex реализованы показатели: линейная зависимость и незначительный гистерезис на зависимости R(ε) при ε<150%, хорошая повторяемость снимаемого сигнала для многочисленных циклов (~2000) нагрузки и снятия нагрузки [9]. Однако снижается эластичные свойства, когда этот композитный наноматериал длительное времени находится во влажной среде, соответственно, ухудшается показатели тензорезистора.
Высокие показатели параметров S и ε реализированы в биполярных тензорезсторах на основе композитных наноматериалов в составе сывороточного альбумина (БСА) или микрокристаллической целюллозы (МКЦ) и МУНТ [10]. Однако они сильно меняют свойства в присутствии влаги или жидкости, поэтому требуют применения специальных средств защиты, например, инкапсулирование. Это ухудшает их характеристики.
Во многих задачах, например, контроль изгиба конечностей, пальцев, дыхания и т.п. деформации имеют униполярного характера, поэтому подходящими для этих целей являются униполярные датчики деформации. В этих случаях независимо от типа деформации (например, вогнутость или изогнутость, или сжатие и расжатие) с датчика деформации снимается сигналы одной полярности.
Наиболее близким техническим решением к заявляему датчикуом деформации является пьезорезистивный датчик, содержащий гибкую подложку и стекловолокну на котором нанесен слои из смеси углеродных нанотрубок и графитового порошка) [11]. Датчик состоит из гибкой подложкой, приклеенным на ее поверхности стекловолокно (диаметр ~20 мкм), на которое нанесен слой из углеродных нанотрубок и графитового порошка. Датчик имеет: высокое сопротивление ≥1 МОм, S≤25, угловая тензочувствительность Sθ≤0,003 (град-1), коррелированный рост сопротивления при увеличения ε. Здесь Sθ=(ΔR/R0)/Δθ, Δθ - изменение угла изгиба.
Со стороны свободной поверхности подложки датчика прикрепляется на части человеческого тела. Например, при изгибе пальца деформируется гибкая подложка и, соответственно, на него закрепленный тензорезистор тоже. С последнего снимаемый сигнал позволяет контролировать движение.
Недостатками данного типа тензорезистора являются: высокоомное сопротивление, вызывающее нежелательных шумов и трудность согласование датчика с последующей электроники, рост сопротивления с увеличением деформации и сложность создания обратной связи, недостаточные тензочувствительность и угловая тензочувствительность, невозможность формировать датчика непосредственно на поверхность кожи человека, а также не защищенность от влаги.
Задачей предлагаемого изобретения является повышения чувствительности и влагаустойчивости, а также возможность размещения униполярного датчика деформации на коже человека.
Поставленная задача решается следующим образом. В известном униполярном датчике деформации, содержащий гибкую подложку, стекловолокну на котором нанесен смесь углеродных нанотрубок и графитового порошка, отличающийся тем, что содержит слои толщиной 5-15 мкм из композиционного тканеинженерного наноматериала в составе акриловой краски и одностенные углеродных нанотрубок с концентрацией 2-3 мас. %. При этом используемые одностенные углеродные нанотрубки имеют удельную электропроводимость более 50 кСм/м.
Отметим некоторые важные свойства предложенного униполярного датчика деформации на основе биосовместимого тканеинженерного наноматериала:
- простая технология нанесения (метод шелкографии) слоев на поверхности гибкой подложки, не требуют термической обработки;
- высокие тензочувствительности Sθ~0,0054 град-1 и S~50, которые превосходят значениям достигнутых в прототипе (Sθ~ 0,003 град-1 и S~25);
- небольшие удельное сопротивление ~0,1 Ом⋅м и рабочее сопротивление ≤0,1 МОм относительно прототипа - ≥1 МОм; относительно небольшое сопротивление способствует согласованное включение датчика в цепи измерения;
- отрицательная связь между сопротивлением и величиной углом изгиба (деформации) позволяет использовать датчик в системах обратной связи так, как в прототипе имеется положительная связь, что затрудняет создание обратной связи;
- используемая акриловая краска широко применяется в крашении одежды, не вызывают аллергических или иных патологических реакции, и является биосовместимым материалом;
- слои могут быть использованы в тканевой инженерии, например, для контроля деформации искусственно выращенной заплаты сердечной ткани;
- слои (толщина 5-15 мкм) композиционного наноматериала в составе акриловой краски (матрица) и углеродных нанотрубок (наполнитель 2-3 мас. %), являются биосовместимыми и можно их нанести на коже человека, в частности, с помощью 3-D принтера;
- высокая влагаустойчивость: после нахождения в воде в течение 30 ч, его характеристики практический не меняются;
- при большом числе (более 30) циклов изгиба гистерезисы на резистивные характеристики пренебрежимо малы - ≤1%.
Достоинством предложенного датчика деформации на основе биосовместимого тканеинженерного наноматериала является также возможность варьирования консистенции, твердости, модуля упругости (эластичности), тензочувствительности и удельной электропроводимости в зависимости от условий приготовления и концентрационного состава композицонного наноматериала. Из-за высокой тензочувствительности и небольших массо-габаритов предложенная разработка перспективен как датчик давления, так и как датчик тактильных ощущении.
Пример. Композитный наноматериал, используемый в предлагаемом изобретение, состоял из акриловой краски (АК) (ТУ2331-034-05751640-2006) в качестве матрицы и из ОУНТ в качестве наполнителя. Некоторые параметры приведены в таб. 1 [12]:
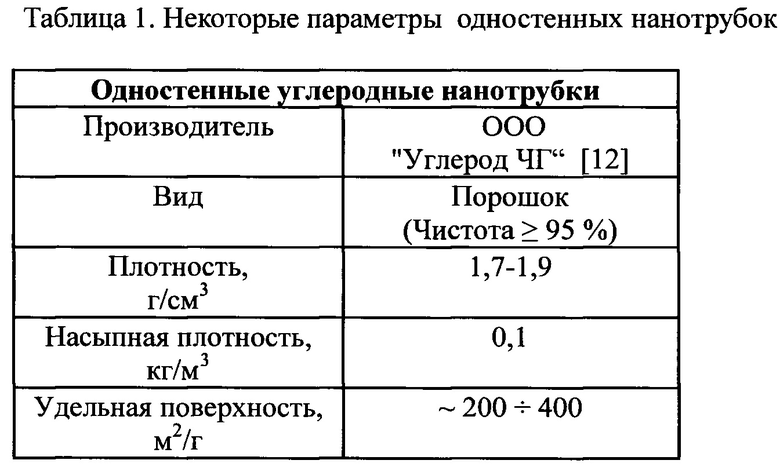
ОУНТ получены методом электродугового синтеза имеют диаметр ~1.5 нм и длины ≤1 мкм. Они карбоксилированы (функционализированы) и в форме водной густой дисперсии пасты (2.5 мас. % ОУНТ) предлагается на продажу. Нанотрубки сильно агрегируются и их удельная поверхность подает от до 1300 200÷400 m2/g. В этих случаях средние размеры тяжей из нанотрубок могут иметь достигать: диаметр - 3÷4 нм, длина - 1÷10 мкм.
Контрольными считались слои из ОУНТ. В случаях их удельной электропроводимости ≥50 кСм/м, данные ОУНТ использовались для создания предлагаемых датчиков. Такой выбор ОУНТ позволял получить композитный наноматериал АК/ОУНТ с высоким значением удельной проводимости при небольшой концентрации нанотрубок (≤3 мас. %).
Композитный наноматериал АК/ОУНТ приготовлялся следующим образом. В АК добавлялись ОУНТ и суспензия АК/2 мас. % ОУНТ тщательно перемешивалась с помощью магнитной мешалки в течение 24 ч и диспергировались в ультразвуковом (УЗ) диспергаторе (Qsonica модель Q700) в течение 30 мин. Методом шелкографии суспензии ОУНТ или АК/ОУНТ наносились на эластичные подложки (хлопчатобумажная ткань, офисная бумага, полиэтилентерефталат (ПЭТ)). Все подложки были эластичные и их толщины были ≤50 мкм. После высыхания в нормальных условиях полученным слоям придавали форму полос с размерами: длина ~30 мм, ширина ~4-5 мм, толщина ~5÷15 мкм.
Внешний вид типичных датчиков деформации показан на фиг. 1. Слои помещались в установке, позволяющей производить их изгибы и измерения параметров при деформациях. Установка управлялась персональным компьютером и все режимы работы и характеристики контролировались и записывались. В частности: количество циклов, количество шагов, сопротивление, рабочая температура, время измерения каждого шага. Радиус r изгиба регулируется в области 0,5-10 мм. Во всех случаях r=2 мм.
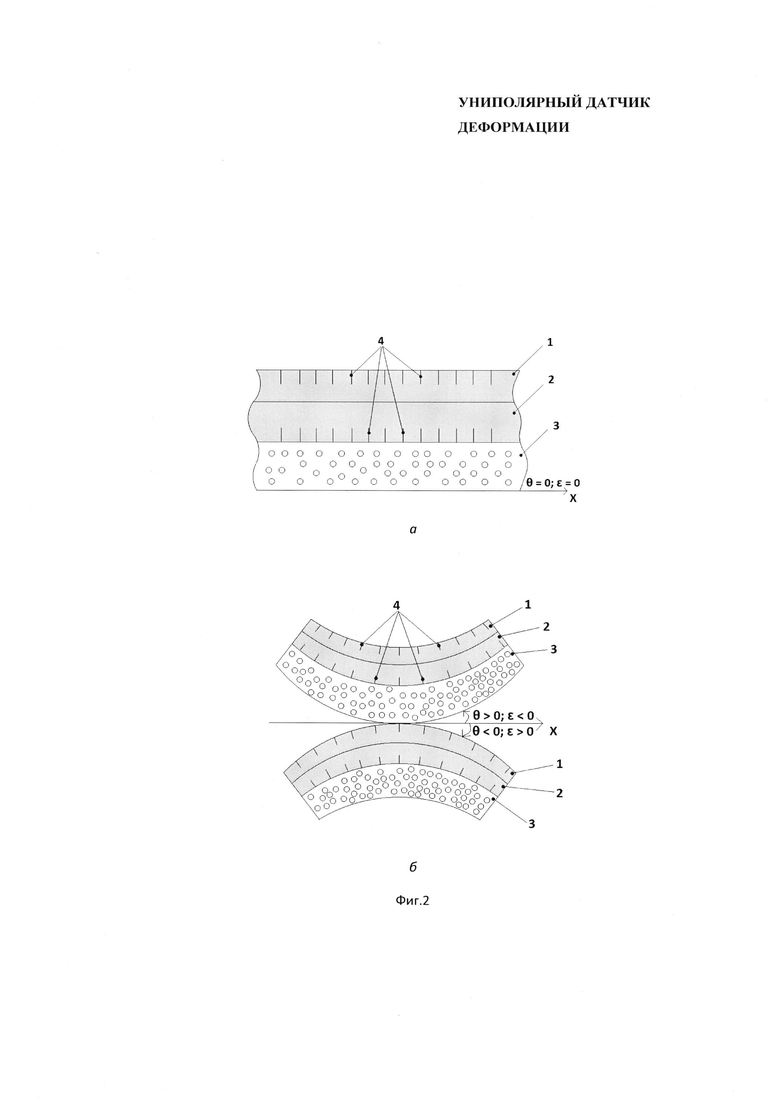
На фиг. 2 показан эскиз датчика в различных режимах и обозначены: а, 1 - часть тензочувствительного слоя вблизи свободной поверхности, 2 - часть тензочувствительного слоя вблизи поверхности подложки, 3 - подложка, 4 - предполагаемое расположение УНТ; б, деформации - сжатие θ>0 - ε<0 (верхняя часть, вогнутость), растяжение θ<0 - ε>0 (нижняя часть, изогнутость). Отчет угла θ приведен относительно горизонтальной оси х.
Эксперимент один полный цикл содержал около 280 шагов, то есть датчик получал изгибы в диапазоне Δθ=±140°. Скорость изгиба ~ 0,5 шаг/сек, т.е. 1°/с, один цикл измерения длился ~560 с. Для некоторых датчиков полное число циклов измерения достигало n~500, а число шагов ~150 000.
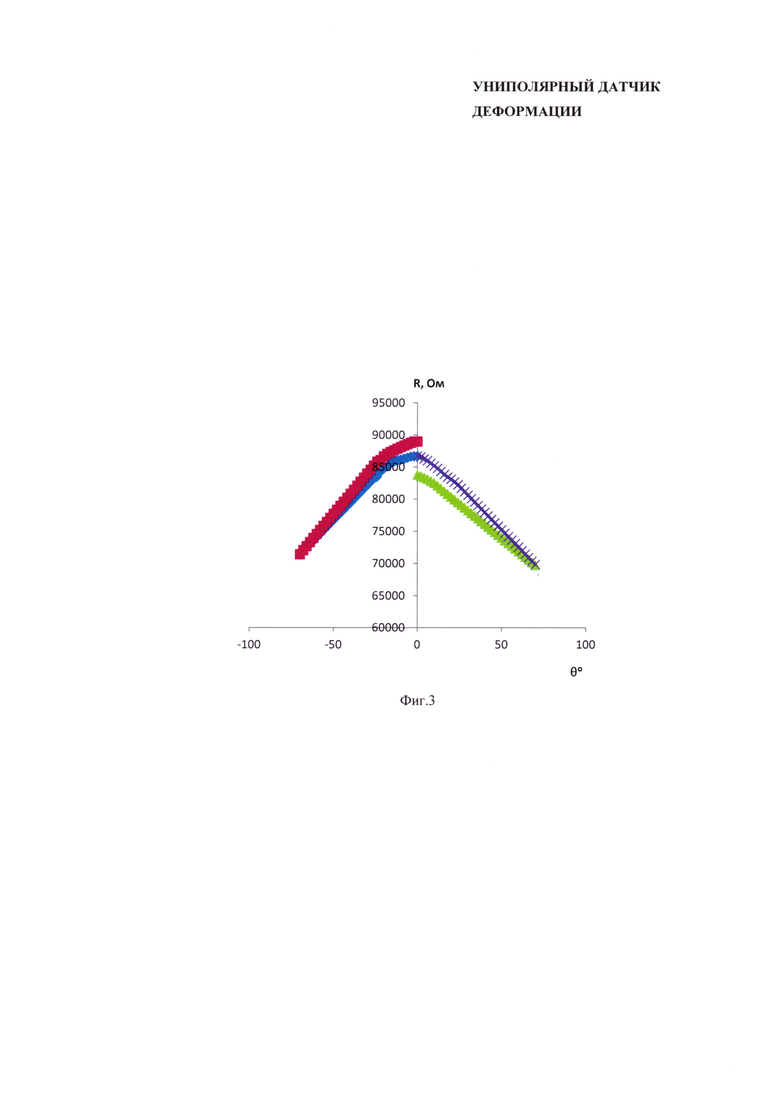
На фиг. 3 представлена типичная зависимость сопротивления R от угла θ для предложенного униполярного датчика деформации при количестве циклов измерения n=1. Он представлял собой слои (толщина 5 мкм, ширина 4 мм, длина 25 мм, подложка ПЭТ) из композитного наноматериала АК/ОУНТ. Видно, что кривая R(θ) является непрерывной и практически линейной при диапазонах ⎪θ⎪≥20°. На R(θ) заметен небольшой гистерезис, в частности, при θ=0 (начало и окончание цикла) измеряемые сопротивления отличаются приблизительно на 6%. Однако с увеличением число циклов, гистерезисы на R(θ) уменьшаются, а при n≥30 гистерезисы практический исчезают. Их значения становятся меньше 1-2%. С ростом n происходит незначительное увеличение абсолютного значения R и одновременно медленно растут тензочувствительности тензорезистора. Например, при n=100 величина Sθ~0,0054 град-1 и S~50 на 30% больше, чем их значения при n=1 (см. фиг. 3). Величина S определялся с учетом радиуса изгиба r=2 мм и толщины d≈5 мкм, как S=(ΔR/R0)/(d/r) согласно геометрии пленки. Дальнейшее увеличение количество циклов (n≥100) значения тензочувствительностей практический не меняется. Из R(θ) вычисленные чувствительности Sθ~0,0054 град-1 и S~50 превосходят значения, достигнутые в прототипе (Sθ~0,003 град-1 и S~25) [11].
Сущность предлагаемого изобретения состоит в следующем. В датчике виде слоя во время сжатие (вогнутость) плотность контактов между нанотрубками увеличивается, а при растяжение (изогнутость) уменьшается. Соответственно, при сжатия сопротивление уменьшается, а при растяжения увеличивается. Этот механизм реализуется в тонких слоях (толщина ≤1 мкм) [10], когда длина нанотрубок  порядка или больше толщины d слоя. В толстых слоях (толщина d>>1 мкм, ≤d) во время деформации около одной поверхности плотность контактов между нанотрубками растет, т.е. сопротивление подает, а около другой поверхности уменьшается, и соответственно, сопротивление увеличивается. Это отражено на фиг. 2. Действительно, при отсутствие деформации, нанотрубки 4 одинаково распределены около обеих поверхностей (1 и 2) слоя (фиг. 2, а). При деформации (вогнутость) нанотрубки 4 находящихся около поверхности 1 расходятся между собой (фиг. 2, б, верхняя часть), а нанотрубкии 4 находящихся около поверхности 2 приближаются между собой (фиг. 2, б, нижняя часть). Соответственно, сопротивление подслоя около поверхности 1 увеличивается я, а около поверхности 2 уменьшается. Видно, что при в любой форме деформации около одной поверхности сопротивление слоя увеличивается, и одновременно, около другой поверхности уменьшается. Поэтому, можно предполагать, что чувствительный слой состоит из двух параллельно включенных подслоев, находящихся около поверхностей, у которых от деформации по-разному меняется сопротивление. В частности, согласно фиг. 2, б, (например, верхняя часть), качественное изменение сопротивления для подслоя вблизи поверхности 1 можно условно описать как R1=R0(1+αθ), а для подслоя вблизи поверхности 2, как R2=R0(1-αθ). Здесь R0 - сопротивление подслоев при отсутствии деформации, α - коэффициент, θ - уголь отчитывается относительно оси х, как показан на фиг. 2. При таких допущениях поведение суммарного или тоже самое полного сопротивления будет
порядка или больше толщины d слоя. В толстых слоях (толщина d>>1 мкм, ≤d) во время деформации около одной поверхности плотность контактов между нанотрубками растет, т.е. сопротивление подает, а около другой поверхности уменьшается, и соответственно, сопротивление увеличивается. Это отражено на фиг. 2. Действительно, при отсутствие деформации, нанотрубки 4 одинаково распределены около обеих поверхностей (1 и 2) слоя (фиг. 2, а). При деформации (вогнутость) нанотрубки 4 находящихся около поверхности 1 расходятся между собой (фиг. 2, б, верхняя часть), а нанотрубкии 4 находящихся около поверхности 2 приближаются между собой (фиг. 2, б, нижняя часть). Соответственно, сопротивление подслоя около поверхности 1 увеличивается я, а около поверхности 2 уменьшается. Видно, что при в любой форме деформации около одной поверхности сопротивление слоя увеличивается, и одновременно, около другой поверхности уменьшается. Поэтому, можно предполагать, что чувствительный слой состоит из двух параллельно включенных подслоев, находящихся около поверхностей, у которых от деформации по-разному меняется сопротивление. В частности, согласно фиг. 2, б, (например, верхняя часть), качественное изменение сопротивления для подслоя вблизи поверхности 1 можно условно описать как R1=R0(1+αθ), а для подслоя вблизи поверхности 2, как R2=R0(1-αθ). Здесь R0 - сопротивление подслоев при отсутствии деформации, α - коэффициент, θ - уголь отчитывается относительно оси х, как показан на фиг. 2. При таких допущениях поведение суммарного или тоже самое полного сопротивления будет

Из (1) видно, что полное сопротивление слоя является четной функцией и не зависит от знака θ, таким же образом не зависит от знака ε деформации: (сжатие ε<0) или растяжение (ε>0). Это следует из того факта, что между величинами ε и θ существует корреляция. Действительно, согласно фиг. 2, имеет место: θ>0 - ε<0, или θ<0 - ε>0.
Таким образом, параболическая форма зависимости R(θ) представленной формулой (1) качественно описывает экспериментальные R(θ) (см. фиг. 3) полученных в предлагаемом датчике деформации. Видно, что изменение сопротивления не зависит от знаков θ и ε, то есть от типа деформации: сжатие или растяжение. Поэтому данный датчик является униполярным датчиком деформации.
Согласно фиг. 3 межу R и θ существует отрицательная связь, т.е. сопротивление уменьшается при росте угла изгиба или величины деформации. Эта позволяет использовать датчик в системах обратной связи, например, для удержания на заданном уровне уголь изгиба (деформацию).
Предлагаемый униполярный датчик деформации исследовался на влагаустойчивоть. Слои АК/ОУНТ помещались в воде. Они имели размеры: толщина ~15 мкм, ширина ~5 мм, длина ~30 мм. Слоя находящийся в воде в течение 30 ч практический не теряли массу (точность измерения 0,5%), а сопротивление увеличивался не более на 1-2%. Это свидетельствует о хорошей влагаустойчивости датчкика, и по-видимому, нет необходимости применять дополнительные меры для повышения его защищенности относительно влаги или воды.
Следовательно, для каждой конкретной задачи можно подобрать нужные параметры датчика, в частности, модуль упругости для его формирования не только на коже человека, но и на кожном покрове различных биологических объектов. Рассмотренные композитные наноматериалы ввиду их биосовместимости, электропроводности и возможности нанесения на кожную поверхность, перспективны для бурно развивающего направления «Кожная электроника».
Таким образом, поставленная задача выполнена - предложен униполярный датчик деформации на основе биосовместимого тканеинженерного наноматериала с повышенной тензочувствительностью, влагоустойчивостью и возможностью его формирования на поверхности человеческой кожи.
ИСТОЧНИКИ ИНФОРМАЦИИ:
1. http://www.hbm.ru/pic/pdf/1372416324.pdf
2. Liang X., and Boppart S.A. / Biomechanical Properties of In Vivo Human Skin From Dynamic Optical Coherence Elastography // IEEE Transactions on Biomedical Engineering, 2010, 57(4), pp. 953-959._DOI: 10.1109/TBME.2009.2033464
3.. Sida Luo, Wans Obitayo, Tao Liu /SWCNT-thin-film-enabled fiber sensors for lifelong structural health monitoring of polymeric composites - From manufacturing to utilization to failure // Carbon, 2014, vol. 76, pp. 321-329.
4. Sida Luo, T. Liu. / Structure-property-processing relationships of single-wall carbon nanotube thin film piezoresistive sencors // Carbon, 2019, vol. 59, pp. 315-324. https://doi.org/10.1016/j.carbon.2014.04.03
5. Ichkitidze L., Podgaetsky V., Selishchev S., Blagov E., Galperin V., Shaman Y., Pavlov A., Kitsyuk E. / Electrically-Conductive Composite Nanomaterial with Multi-walled Carbon Nanotubes // Materials Sciences and Applications. 2013. Vol. 4(5A). PP. 1-7.
6. Jiang D. / Carbon Nanotube Based Interconnect Materials for Electronic Applications // EMSL Department of Microtechnology and Nanoscience (MC2), Chalmers University of Technology SE-412 96 Gothenburg, Sweden, 2015. - 55 p. ISBN: 978-91-7597-305-0.
7. Jung D. and Lee G.S. / Strain-Sensing Characteristics of Multi-Walled Carbon Nanotube Sheet // Journal of Sensor Science and Technology, Vol. 22, No. 5 (2013) pp. 315-320. http://dx.doi.org/10.5369/JSST.2013.22.5.315
8. Liu Y., Sheng Q., Muftu S., Khademhosseini A., Wang M.L., and Dokmeci M.R. / A stretchable and transparent SWCNT strain sensor encapsulated in thin PDMS films // Transducers 2013, Barcelona, SPAIN, 16-20 June 2013, T3P.044, pp. 1091-1094.
9. Amjadi M, Yoon Y.J., and Park I. / Ultra-stretchable and skin-mountable strain sensors using carbon nanotubes-Ecofiex nanocomposites // Nanotechnology, 26 (2015) 375501 (11 pp).
doi: 10.1088/0957-4484/26/37/375501
10. Патент РФ №2662060
11. Sida Luo, Tao Liu. / Piezoresistive sensors and methods // Патент США US 20150248159 A1 - прототип.
12. http://www.carbonchg.ru/
| название | год | авторы | номер документа |
|---|---|---|---|
| БИПОЛЯРНЫЙ ДАТЧИК ДЕФОРМАЦИИ НА ОСНОВЕ БИОСОВМЕСТИМОГО НАНОМАТЕРИАЛА | 2017 |
|
RU2662060C1 |
| ТКАНЕИНЖЕНЕРНАЯ КОНСТРУКЦИЯ ДЛЯ РЕГЕНЕРАЦИИ СЕРДЕЧНОЙ ТКАНИ | 2019 |
|
RU2725860C1 |
| МЕТОД ПОЛУЧЕНИЯ ПРОЧНОГО И ТОКОПРОВОДЯЩЕГО ВОЛОКНА ПУТЕМ ВЫТЯГИВАНИЯ ПЛЕНОК ИЗ УГЛЕРОДНЫХ НАНОТРУБОК | 2018 |
|
RU2690821C1 |
| СПОСОБ ПОЛУЧЕНИЯ БИОСОВМЕСТИМОГО НАНОМАТЕРИАЛА | 2016 |
|
RU2633088C1 |
| Тензочувствительный силиконовый сенсор и способ его крепления | 2022 |
|
RU2810692C1 |
| ИСКУССТВЕННАЯ МЫШЦА ДЛЯ СЕРДЕЧНОЙ ТКАНИ | 2017 |
|
RU2675062C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАНОСТРУКТУРИРОВАННОГО КОМПОЗИЦИОННОГО ЭЛЕКТРОПРОВОДЯЩЕГО ПОКРЫТИЯ | 2015 |
|
RU2606842C1 |
| Гибридный материал на основе поли-3-амино-7-метиламино-2-метилфеназина и одностенных углеродных нанотрубок и способ его получения | 2016 |
|
RU2635606C2 |
| Способ изготовления нанокомпозитного имплантата связки сустава | 2019 |
|
RU2744710C2 |
| СПОСОБ ПОЛУЧЕНИЯ ВЫСОКОПРОЧНОГО КОМПОЗИЦИОННОГО МАТЕРИАЛА НА ОСНОВЕ ТЕРМОПЛАСТИЧНОГО ПОЛИМЕРА, МОДИФИКАТОР ДЛЯ ПРИГОТОВЛЕНИЯ КОМПОЗИЦИОННОГО МАТЕРИАЛА И СПОСОБ ПОЛУЧЕНИЯ МОДИФИКАТОРА ДЛЯ ПРИГОТОВЛЕНИЯ КОМПОЗИЦИОННОГО МАТЕРИАЛА (ВАРИАНТЫ) | 2019 |
|
RU2708583C1 |

Использование: для создания тензорезисторных датчиков деформации. Сущность изобретения заключается в том, что униполярный датчик деформации содержит гибкую подложку, стекловолокно, на котором нанесена смесь углеродных нанотрубок и графитового порошка, при этом содержит слой толщиной 5-15 мкм из композиционного тканеинженерного наноматериала в составе акриловой краски и одностенных углеродных нанотрубок с концентрацией 2-3 мас. %. Технический результат: обеспечение возможности повышения чувствительности и влагоустойчивости. 1.з.п. ф-лы, 3 ил.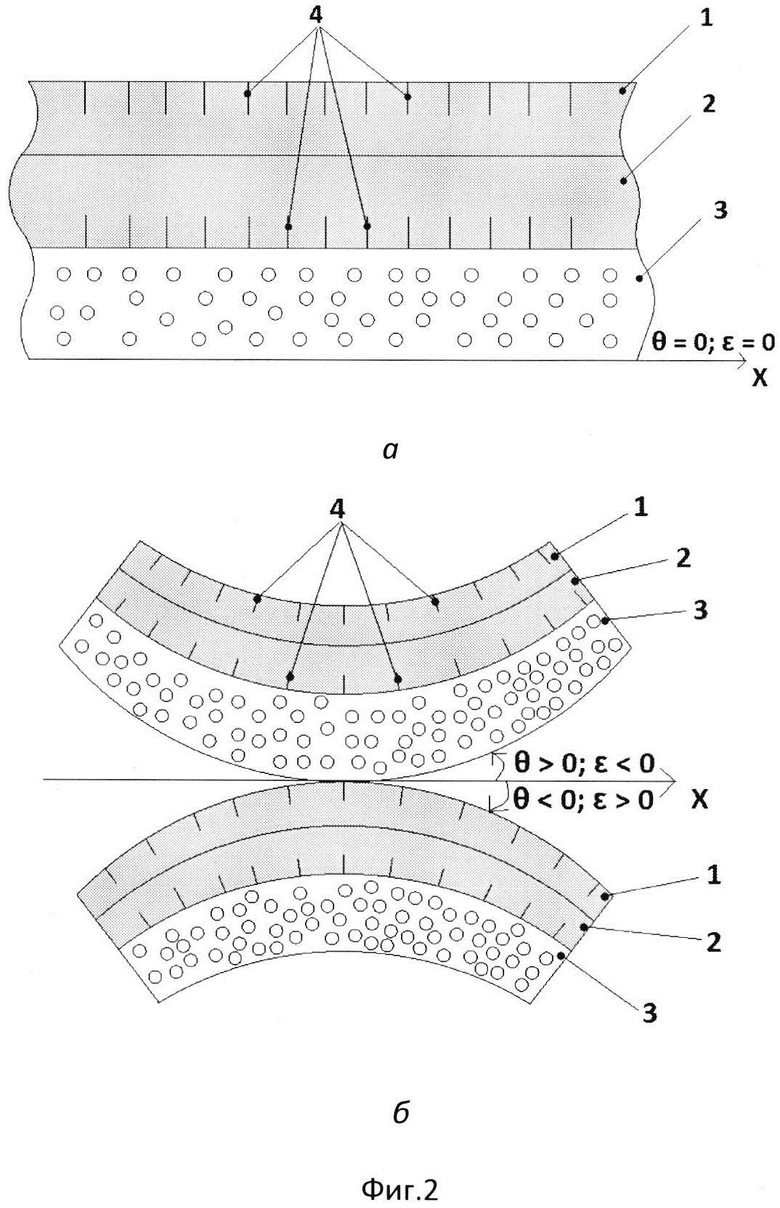
1. Униполярный датчик деформации, содержащий гибкую подложку, стекловолокно, на котором нанесена смесь углеродных нанотрубок и графитового порошка, отличающийся тем, что содержит слой толщиной 5-15 мкм из композиционного тканеинженерного наноматериала в составе акриловой краски и одностенных углеродных нанотрубок с концентрацией 2-3 мас. %.
2. Униполярный датчик деформации по п. 1, отличающийся тем, что одностенные углеродные нанотрубки имеют удельную электропроводимость более 50 кСм/м.
| Затвор для круглых отверстий | 1929 |
|
SU20049A1 |
| US 20170176267 A1, 22.06.2017 | |||
| US 20170059418 A1, 02.03.2017 | |||
| US 8191433 B2, 05.06.2012 | |||
| US 9476782 B2, 25.10.2016 | |||
| US 20160377493 A1, 29.12.2016. | |||

