Изобретение относится к средствам противоздушной обороны, конкретно к способу перехвата летательных аппаратов самонаводящейся электроракетой.
Известен способ перехвата летательных аппаратов самонаводящейся электроракетой /RU 2015151254, 06.06.2017/, включающий развертывание пусковых установок электроракет (ЭР) на территории обороняемого объекта, расчет множества допустимых траекторий полетов ЭР для перехвата опасных летательных аппаратов (ЛА) с требуемой вероятностью их поражения, активацию аккумуляторных батарей электроракет, выбранных для перехвата ЛА, одновременное введение в память бортовой электронно-вычислительной машины (ЭВМ) ЭР массива данных о траектории полета ЭР, старт ЭР и вывод их в зону видимости ЛА головкой самонаведения (ГСН) ЭР, включение режима самонаведения ЭР и безогневое поражение ЛА.
Недостатком известного способа перехвата летательных аппаратов самонаводящейся электроракетой является сравнительно невысокая вероятность их безогневого поражения.
Задачей и техническим результатом изобретения является повышение вероятности безогневого поражения ЛА.
Сущность изобретения.
Достижение заявленного технического результата и решение поставленной задачи обеспечивается тем, что способ перехвата летательных аппаратов самонаводящейся электроракетой включает развертывание боевого порядка пусковых установок (ПУ) электроракет на территории обороняемого объекта. При развернутом боевом порядке ПУ рассчитывают множество допустимых траекторий полетов ЭР для перехвата опасных ЛА с требуемой вероятностью их поражения. Далее непосредственно на ПУ активируют аккумуляторные батареи выбранных для перехвата ЛА электроракет. Одновременно вводят в память бортовой электронно-вычислительной машины (ЭВМ) ЭР массив данных о возможных траекториях полета ЭР. Далее осуществляют старт ЭР и вывод их в зону видимости ЛА головкой самонаведения ЭР. После вывода ЭР в зону видимости ЛА включают режим самонаведения ЭР. При встрече ЭР с ЛА производят безогневое поражение последней. При промахе ЭР проводят разворот ЭР по кольцевой траектории в зону повторной видимости ЛА ГСН ЭР и осуществляют повторное самонаведение ЭР на ЛА.
Возможность разворота и повторное самонаведение ЭР на ЛА в заявленном способе обеспечивается наличием остаточного запаса энергии аккумуляторных батарей ЭР. Наличие остаточного запаса энергии аккумуляторных батарей выявлено в процессе испытаний авторами настоящего изобретения известной электоракеты /RU 2015151254/ с известным движителем /RU 2015151255/ по известному способу /RU 2015151256/. Это позволило, в случае промаха ЭР, использовать остаточный запас энергии аккумуляторных батарей для разворота ЭР и повторной атаки на ЛА.
Следствием этого явилось повышение вероятности поражения опасного ЛА и достижение заявленного технического результата.
Сущность изобретения поясняется рисунками, представленными на фиг. 1 -фиг. 12.
На фиг. 1 представлен рисунок, поясняющий заход электроракеты через вертикальный маневр при перехвате цели, расположенной между строениями.
На фиг. 2 представлен рисунок, поясняющий заход электроракеты через горизонтальный маневр при перехвате цели, расположенной между строениями.
На фиг. 3 представлен рисунок, поясняющий заход электроракеты через горизонтальный маневр при перехвате цели, расположенной на фоне строения.
На фиг. 4 представлен рисунок, поясняющий перехват малоразмерного беспилотного летательного аппарата (БПЛА) с помощью, выбрасываемой по полету, сетки.
На фиг. 5 представлен рисунок, поясняющий перехват малоразмерного БПЛА с помощью кольцевого парашюта-сетки, выбрасываемого из хвостового контейнера с последующим зависанием и плавным спуском за счет тяги движителя электроракеты, в том числе:
5а) - момент раскрытия кольцевого парашюта-сетки непосредственно перед целью;
5б) - момент захвата кольцевым парашютом-сеткой цели;
5в) - этап набора высоты ЭР с захваченной целью;
5г) - этап стабилизации параметров динамики движения ЭР с захваченной целью;
5д) - этап спуска ЭР с захваченной целью на землю после снижения тяги движетеля и обепечения безопасной скорости спуска.
На фиг. 6 представлен рисунок, поясняющий схему повторного захода электроракеты в заднюю полусферу цели, после промаха на встречных курсах.
На фиг. 7 представлен рисунок, поясняющий схему повторного захода электроракеты в заднюю полусферу цели, после промаха на попутном курсе.
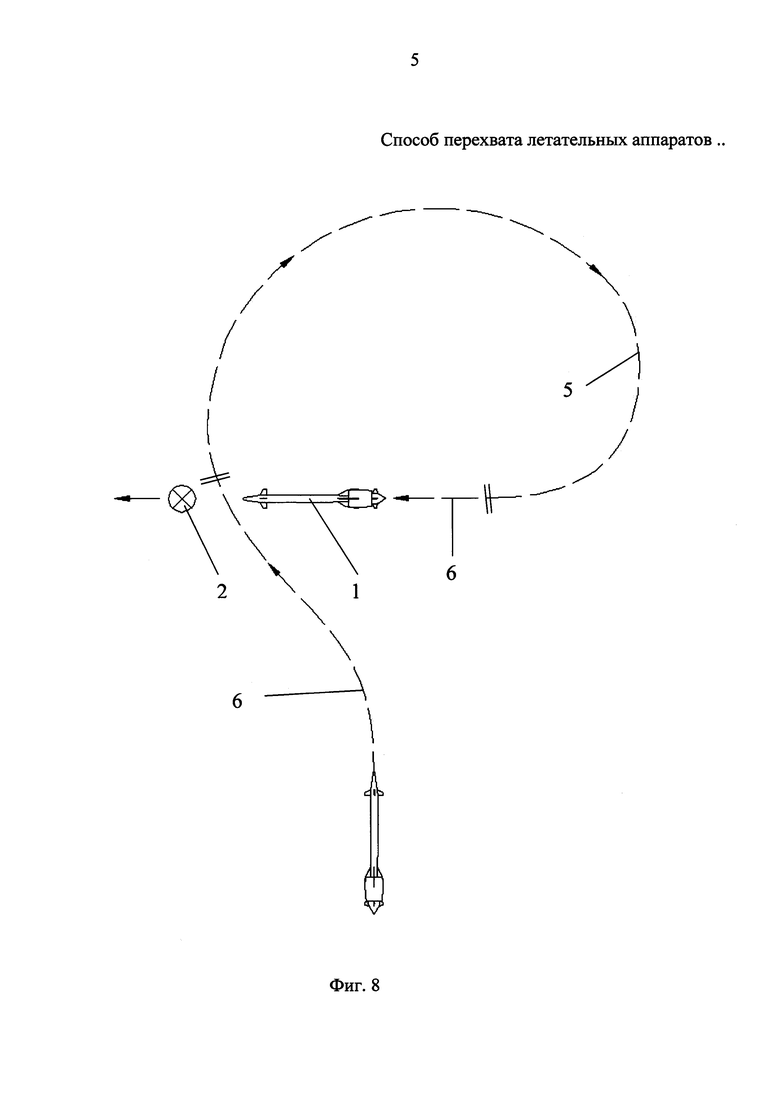
На фиг. 8 представлен рисунок, поясняющий схему повторного захода электроракеты в заднюю полусферу цели, после промаха «на проходе».
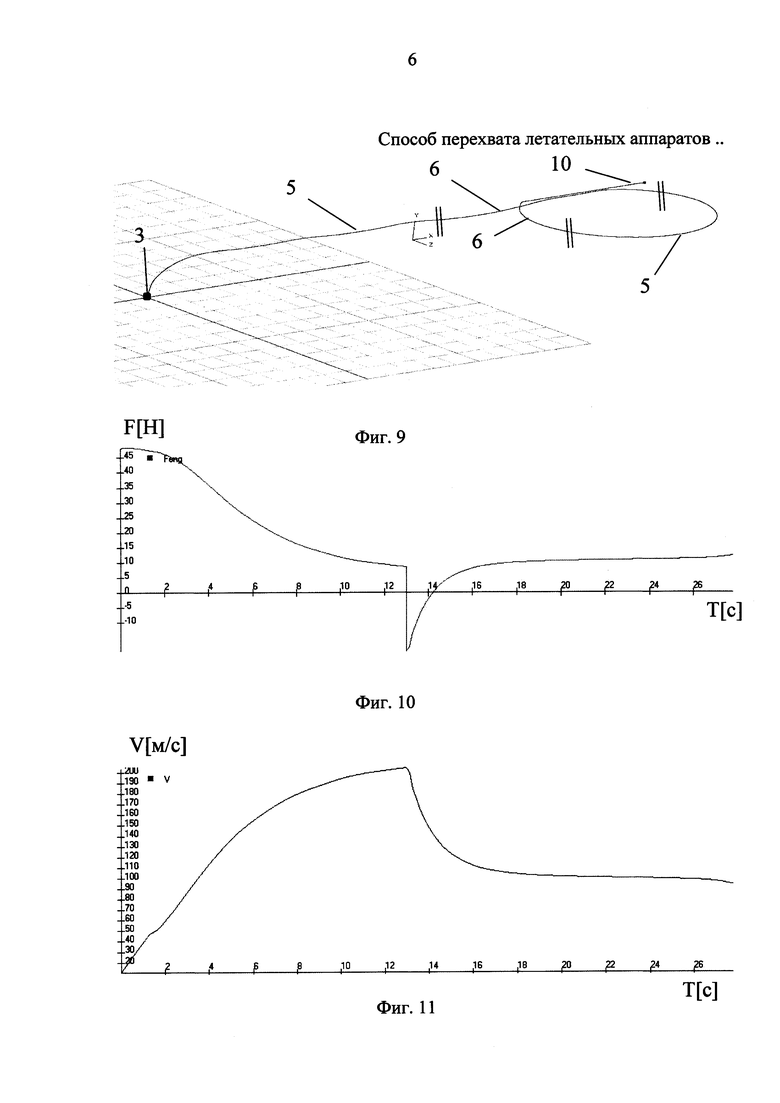
На фиг. 9 показаны полученные путем численного моделирования траектории ЭР и ЛА после промаха на встречных курсах с последующим повторным заходом ЭР на цель.
На фиг. 10 представлен график изменения тяги движителя ЭР по времени для траектории ЭР представленной на фиг 9. По оси абсцисс отложено время в секундах, по оси ординат отложена величина тяги в ньютонах.
На фиг. 11 представлен график изменения скорости ЭР по времени для траектории ЭР, представленной на фиг 9. По оси абсцисс отложено время в секундах, по оси ординат отложена путевая скорость V [м/с].
На фиг. 12 представлен рисунок, поясняющий спасение электроракеты с помощью гибридного (тормозная и спасательная функция парашюта) парашюта спасения ЭР в случае невыполнения задания.
На фиг. 1-12 обозначены:
1 - электоракета (ЭР);
2 - летательный аппарат - воздушная цель (ЛА);
3 - пусковая установка ЭР;
4 - строения (жилые дома, промышленные объекты, энергоблоки АЭС);
5 - инерциальный участок траектории полета ракеты ЭР;
6 - участок самонаведения ЭР;
7 - сетка, выбрасываемая по полету ЭР для захвата цели;
8 - сбрасываемая головная часть ЭР;
9 - кольцевой парашют-сетка для захвата цели;
10 - участок траектории полета ЛА, полученный при математическом моделировании;
11 - парашют спасения ЭР.
Согласно фиг. 1-12 способ перехвата летательных аппаратов самонаводящейся электроракетой включает развертывание боевого порядка пусковых установок 3 электроракет 1 на территории обороняемого объекта 4. Развертывание боевого порядка пусковых установок 3 электроракет 1 на территории обороняемого объекта 4 производят по данным электронной 3D карты местности, включающей геометрические данные о строениях объекта обороны, расстояния между ними, достаточные для пролета беспилотных ЛА 2 и безопасного применения ЭР 1.
При развернутом боевом порядке ПУ 3 рассчитывают множество допустимых траекторий полетов ЭР 1 для перехвата опасных ЛА 2 с требуемой вероятностью их поражения. Расчет множества допустимых траекторий полетов ЭР 1 для перехвата опасных ЛА 2 производят посредством численного решения задачи динамики полета ЭР 1 как функции аргументов, включающих тип ЛА 2, вид средств их безогневого поражения, боевой порядок пусковых установок и возможные пути пролета ЛА 2 между строениями обороняемого объекта.
Далее непосредственно на ПУ 3 активируют аккумуляторные батареи ЭР 1, выбранных для перехвата ЛА 2. Активацию аккумуляторных батарей ЭР 1, выбранных для перехвата ЛА 2, производят в течение 0.1-0.2 сек путем пропускания импульсного тока через них. В процессе активации аккумуляторных батарей в память бортовой электронно-вычислительной машины ЭР 1 вводят рассчитанный ранее массив данных о возможных траекториях 5 полета ЭР 1. Далее осуществляют старт ЭР 1 и вывод их в зону видимости ЛА 2 головкой самонаведения ЭР 1. После вывода ЭР 1 в зону видимости ЛА 2 включают режим самонаведения ЭР. При встрече ЭР 1 с ЛА 2 производят безогневое поражение последней. В качестве средств безогневого поражения ЛА 2 используют кинетическую энергию ЭР 1, тормозную энергию кольцевого парашюта-сетки 9 или сетки 7, выбрасываемой по полету ЭР 1, размещенных на борту ЭР 1.
При промахе ЭР 1 проводят разворот ЭР 1 по кольцевой траектории в зону повторной видимости ЛА 2 ГСН ЭР 1 и осуществляют повторное самонаведение ЭР 1 на ЛА 2. Траекторию полета ЭР 1 в зону повторной видимости головкой самонаведения ЛА 2 рассчитывают на борту ЭР 1 исходя параметров динамики полета ЛА 2, зафиксированных при промахе ЭР 1. Разворот ЭР 1 по кольцевой траектории в зону повторной видимости ЛА 2 производят путем снижения путевой скорости ЭР 1 и перекладки струйных рулей в угловое положение, соответствующее максимальному аэродинамическому качеству струйного руля.
Изобретение разработано на уровне технического проекта и опытного образца электроракеты. Летные испытания электроракеты и математическое моделирование перехвата электроракетой беспилотного летательного аппарата при скорости полета 20 м/с по заявленному способу показало реализуемость предлагаемого способа и достижение технического результата, выражающегося в повышении вероятности поражения летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонаводящаяся электроракета | 2018 |
|
RU2686550C1 |
| Активная головка самонаведения | 2018 |
|
RU2689276C1 |
| Электрический реактивный движитель | 2018 |
|
RU2689663C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| Оптоэлектронный измеритель координат воздушных целей | 2018 |
|
RU2674563C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1996 |
|
RU2111445C1 |
| ПРОТИВОВОЗДУШНЫЙ АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС САМООБОРОНЫ ПОДВОДНЫХ ЛОДОК ("ПАУК" СО ПЛ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2008 |
|
RU2382313C2 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| КОМПЛЕКС САМОЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ОТ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ | 2006 |
|
RU2336486C2 |
| СПОСОБ ЗАЩИТЫ РЛС ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1999 |
|
RU2153684C1 |

Изобретение относится к средствам противоздушной обороны и конкретно к способу перехвата летательных аппаратов - ЛА самонаводящейся электроракетой - ЭР. Технический результат - повышение вероятности поражения ЛА за счет возможности повторной атаки ЭР. По способу осуществляют развертывание пусковых установок ЭР на территории обороняемого объекта. Рассчитывают множество допустимых траекторий полетов ЭР для перехвата опасных ЛА с требуемой вероятностью их поражения. Активируют аккумуляторные батареи ЭР, выбранных для перехвата ЛА. Вводят в память бортовой электронно-вычислительной машины - ЭВМ ЭР массив данных о траектории полета ЭР, старт ЭР и вывод их в зону видимости ЛА головкой самонаведения - ГСН ЭР. Включают режим самонаведения ЭР и обеспечивают безогневое поражение ЛА. При этом траекторию полета ЭР в зону повторной видимости ГСН рассчитывают на борту ЭР. Предусматривают разворот ЭР путем снижения ее путевой скорости и перекладки струйных рулей в угловое положение, соответствующее максимальному аэродинамическому качеству струйного руля. Угловое рассогласование оси ЭР с заданным направлением траектории ее движения измеряют блоком флюгарок. Отработку измеренного рассогласования, выдачу корректирующего сигнала на рули управления, сведение к нулю величины рассогласования и поддержание оси ЭР с направлением траектории ее движения производят с помощью управляющего вычислительного модуля ЭР. 6 з.п. ф-лы, 12 ил.
1. Способ перехвата летательных аппаратов самонаводящейся электроракетой, включающий развертывание пусковых установок электроракет - ЭР на территории обороняемого объекта, расчет множества допустимых траекторий полетов ЭР для перехвата опасных летательных аппаратов - ЛА с требуемой вероятностью их поражения, активацию аккумуляторных батарей ЭР, выбранных для перехвата ЛА, одновременное введение в память бортовой электронно-вычислительной машины - ЭВМ ЭР массива данных о траектории полета ЭР, старт ЭР и вывод их в зону видимости ЛА головкой самонаведения - ГСН ЭР, включение режима самонаведения ЭР и безогневое поражение ЛА, отличающийся тем, что траекторию полета ЭР в зону повторной видимости ГСН рассчитывают на борту ЭР, при этом разворот ЭР производят путем снижения ее путевой скорости и перекладки струйных рулей в угловое положение, соответствующее максимальному аэродинамическому качеству струйного руля, угловое рассогласование оси ЭР с заданным направлением траектории ее движения измеряют блоком флюгарок, отработку измеренного рассогласования, выдачу корректирующего сигнала на рули управления, сведение к нулю величины рассогласования и поддержание оси ЭР с направлением траектории ее движения производят с помощью управляющего вычислительного модуля ЭР.
2. Способ по п. 1, отличающийся тем, что при промахе ЭР разворот ее в зону повторной видимости ЛА ГСН проводят по кольцевой траектории.
3. Способ по п. 1, отличающийся тем, что развертывание боевого порядка пусковых установок ЭР на территории обороняемого объекта производят по данным электронной 3D карты местности, включающей геометрические данные о строениях объекта обороны, расстояния между ними, достаточные для пролета беспилотных ЛА и безопасного применения ЭР.
4. Способ по п. 1, отличающийся тем, что расчет множества допустимых траекторий полетов ЭР для перехвата опасных ЛА производят посредством численного решения задачи динамики полета ЭР как функции аргументов, включающих тип ЛА, вид средств их безогневого поражения, боевой порядок пусковых установок и возможные пути пролета ЛА между строениями обороняемого объекта.
5. Способ по п. 1, отличающийся тем, что активацию аккумуляторных батарей ЭР, выбранных для перехвата ЛА, производят в течение 0,1-0,2 с путем пропускания импульсного тока через них.
6. Способ по п. 1, отличающийся тем, что в качестве средств безогневого поражения ЛА используют кинетическую энергию ЭР, тормозную энергию кольцевого парашюта-сетки или сетки, выбрасываемой по полету ЭР.
7. Способ по п. 1, отличающийся тем, что промах ЭР определяют по отсутствию продольных перегрузок, соответствующих удару о ЛА, и по факту потери видимости ЛА головкой самонаведения.
| RU 2015151254 A, 06.06.2017 | |||
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2013 |
|
RU2529828C1 |
| КРЫЛО | 2001 |
|
RU2207967C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2011 |
|
RU2468327C1 |
| ЭЛЕКТРОРАКЕТНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2015 |
|
RU2602468C1 |
| US 5932833 A1, 03.08.1999. | |||

