Область техники, к которой относится изобретение
Изобретение относится к часовому резонансному механизму, содержащему поворотный грузик, выполненный с возможностью шарнирного поворота вокруг виртуальной оси поворота, при этом указанный резонансный механизм содержит первую неподвижную опору и вторую неподвижную опору, к которым прикреплен изгибаемый шарнирный механизм, который содержит поворотную опору, соединенную с указанной первой неподвижной опорой при помощи первого упругого узла и соединенную с указанной второй неподвижной опорой при помощи второго упругого узла, который совместно с указанным первым упругим узлом определяет указанную виртуальную ось поворота, при этом указанный поворотный грузик прикреплен к указанной поворотной опоре или образован указанной поворотной опорой.
Изобретение также относится к часовому механизму, включающему в себя по меньшей мере один подобный резонансный механизм.
Изобретение также относится к наручным или карманным часам, включающим в себя по меньшей мере один часовой механизм данного типа.
Изобретение относится к области часовых резонансных механизмов.
Уровень техники
Изгибаемые шарниры с виртуальной осью поворота могут существенно улучшить часовые резонаторы. Наиболее простыми являются шарниры с перекрестными пластинами, состоящими из двух прямых, в целом, перпендикулярных пластин, которые пересекаются. Данные две пластины могут быть либо трехмерными в двух разных плоскостях, либо двухмерными в одной плоскости, в этом случае они приварены в месте их пересечения.
Возможно оптимизировать шарнир с трехмерными пересекающимися пластинами для генератора колебаний, сделав его изохронным, чтобы частота не зависела от его ориентации в гравитационном поле, двумя конкретными путями (по отдельности или в комбинации):
- за счет выбора места пересечения пластин относительно точки их крепления для получения частоты, не зависящей от положения;
- за счет выбора изохронного угла между пластинами для получения частоты, не зависящей от амплитуды.
Подобные трехмерные системы или системы, состоящие из нескольких уровней, известны из патента EP 2911012 на имя CSEM, в котором раскрывается поворотный генератор колебаний для часовых изделий, содержащий опорный элемент, позволяющий устанавливать генератор в часовом изделии, балансовое колесо, несколько гибких пластин, соединяющих опорный элемент с балансовым колесом и способных прикладывать обратный крутящий момент к балансовому колесу, и обод, цельноформованный с балансовым колесом. Несколько гибких пластин содержат по меньше мере две гибкие пластины, включающие в себя первую пластину, расположенную в первой плоскости, перпендикулярной плоскости генератора, и вторую пластину, расположенную во второй плоскости, перпендикулярной плоскости генератора и секущую первую плоскость. Геометрическая ось колебаний генератора определяется в месте пересечения первой плоскости со второй плоскостью, данная геометрическая ось колебаний пересекает первую и вторую пластины на 7/8 их соответствующей длины. Данная компоновка известна из работ Wittrick по гибким шарнирам, начатых в 1948 году.
В патенте EP 1013949 на имя SYSMELEC раскрывается шарнир, состоящий из неподвижного основания и подвижного элемента, соединенных при помощи гибкой конструкции с промежуточным элементом, соединенным с основанием, и подвижным элементом соответственно, при помощи двух пар гибких рычагов. На конце каждого из рычагов имеется соединение, образованное полукруглой выемкой, создающей гибкую область. Шарнир дополнительно содержит кинематический контур управления, соединяющий основание, подвижный элемент и промежуточный элемент таким образом, чтобы угловое перемещение промежуточного элемента соответствовало угловому перемещению подвижного элемента.
Между тем указанные известные решения имеют недостатки:
- шарнир с трехмерными пересекающимися пластинами нельзя вытравливать в процессе единого двухмерного травления, что затрудняет изготовление;
- шарнир с двухмерными пересекающимися пластинами, в котором пластины приварены в месте их пересечения, в четыре раза жестче аналогичного трехмерного шарнира, его допустимый ход в четыре раза меньше, чем у трехмерного шарнира, и он не позволяет получить частоту, не зависящую от положения и амплитуды.
Раскрытие сущности изобретения
Изобретение направлено на использование преимуществ двух известных двухмерных и трехмерных геометрий в одном простом, экономичном, а следовательно, двухмерном варианте осуществления.
Таким образом, изобретение относится к часовому резонансному механизму по п. 1 формулы изобретения.
Изобретение также относится к часовому механизму, включающему в себя по меньшей мере один подобный резонансный механизм.
Изобретение также относится к часам, включающим в себя по меньшей мере один часовой механизм данного типа.
Таким образом, изобретением предлагается шарнир с двухмерными пересекающимися пластинами, состоящий из двух пластин, которые не пересекаются друг с другом. Шарнир включает в себя тонкие детали, которые сгибаются, и широкие детали, которые прочны настолько, что они не подвержены или подвержены незначительной деформации. Поскольку широкие детали не участвуют в изгибании пластин, подобные широкие детали могут быть любой формы.
Краткое описание чертежей
Другие признаки и преимущества изобретения станут понятны из последующего подробного описания со ссылкой на прилагаемые чертежи.
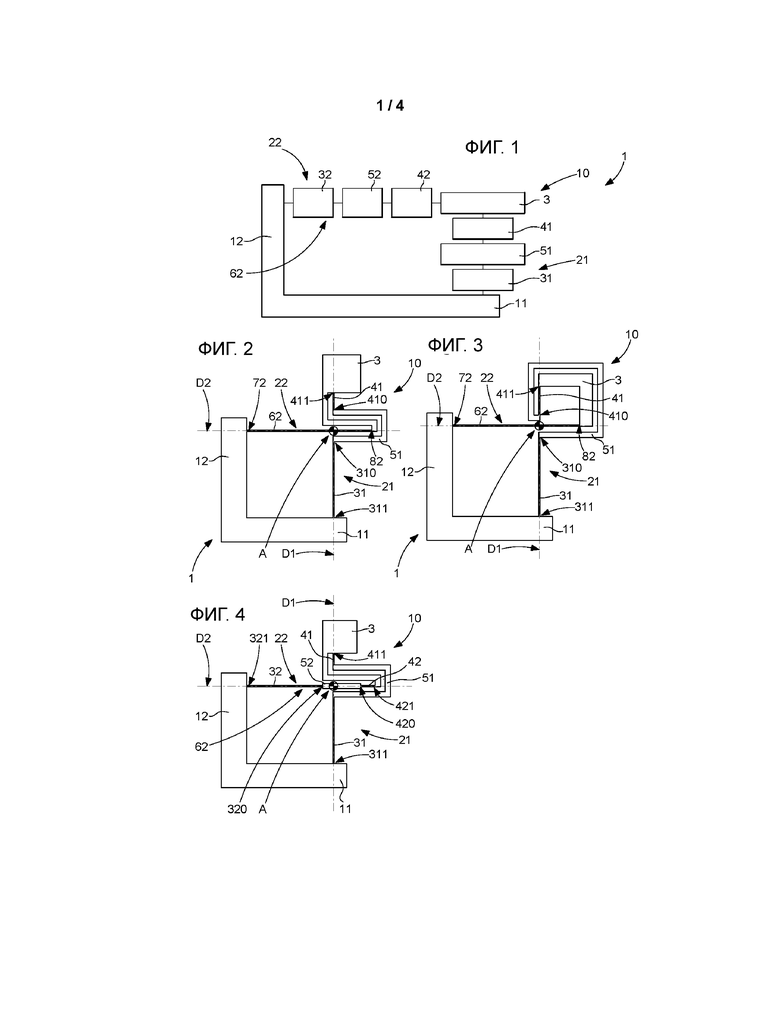
На фиг. 1 в виде блок-схемы показан общий принцип механического резонатора, в котором колесная система подвешена на двух упругих узлах, расположенных в разных направлениях, таким образом, чтобы колесная система имела лишь одну степень свободы при вращении в плоскости листа.
На фиг. 2 показан схематический вид в плане механического резонатора по изобретению с подвешенной поворотной опорой, в котором первый упругий узел включает в себя, с каждой стороны от виртуальной оси поворота, первую наружную гибкую пластину и первую внутреннюю гибкую пластину, соединенные друг с другом при помощи первой промежуточной пластины, более жесткой, чем каждая из вышеуказанных пластин, которые совместно определяют первое направление, проходящее через виртуальную ось поворота, изображенную на фигуре в виде вертикальной оси, тогда как второй упругий узел образован пластиной, которая на фигуре расположена в горизонтальном направлении и которая проходит через виртуальную ось поворота.
На фиг. 3, аналогично фиг. 2, показана компоновка из аналогичных пластин, но в которой первая промежуточная пластина полностью окружает подвижную поворотную опору в плоскости изгибаемого шарнирного механизма.
На фиг. 4, аналогично фиг. 2, показана компоновка из пластин, в которой подвижная поворотная опора находится снаружи первой промежуточной пластины, но в которой второй упругий узел, расположенный в горизонтальном направлении, включает в себя, с каждой стороны от виртуальной оси поворота, вторую наружную гибкую пластину и вторую внутреннюю гибкую пластину, соединенные друг с другом при помощи второй промежуточной пластины, более жесткой, чем каждая из вышеуказанных пластин, указанная вторая промежуточная пластина проходит через виртуальную ось поворота.
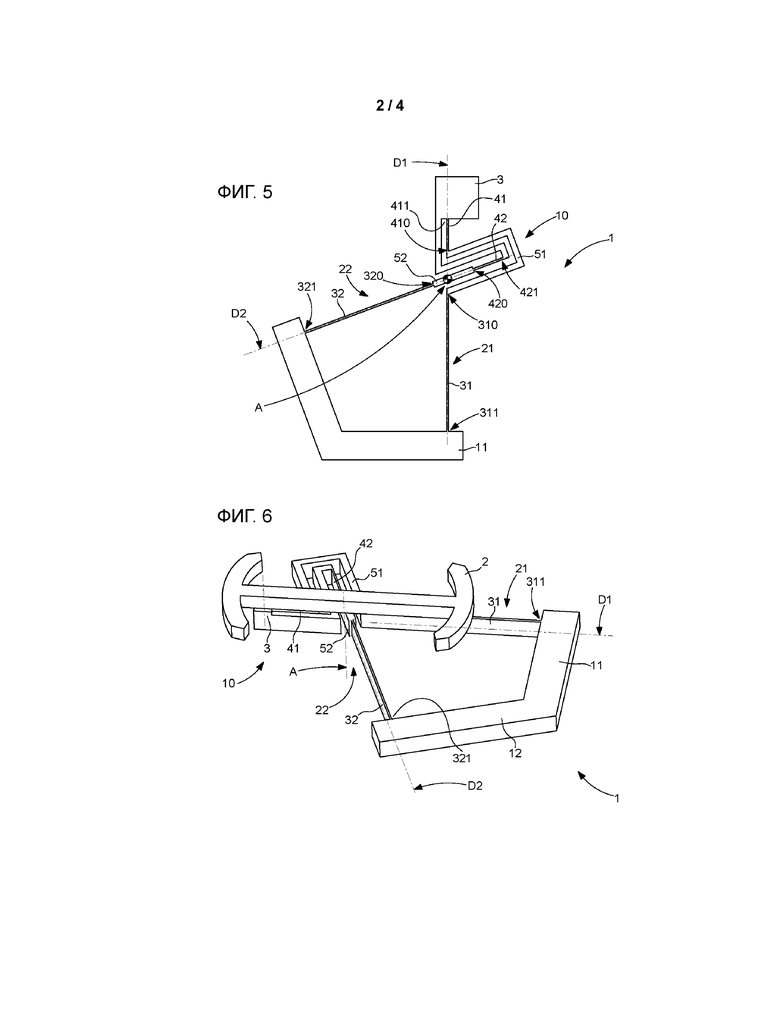
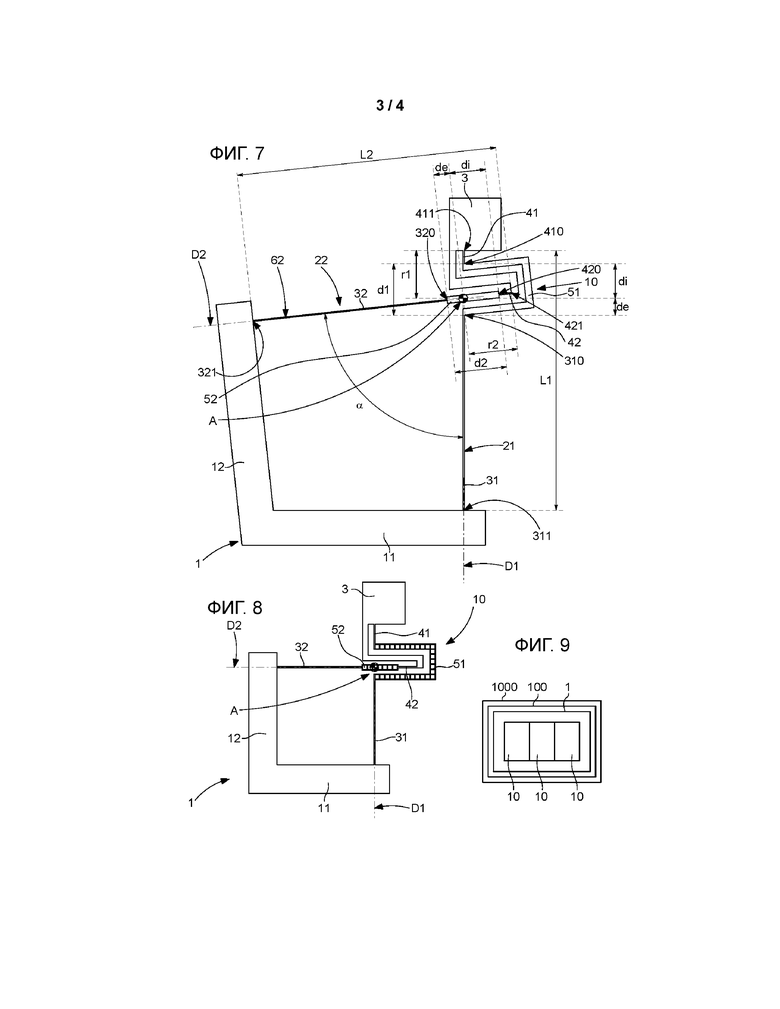
На каждой из фиг. 5 и 7 показан механический резонатор, аналогичный резонатору по фиг. 4, но в котором направления первого упругого узла и второго упругого узла образуют между собой определенный угол, способствующий изохронизму резонатора.
На фиг. 6 показан вид в перспективе резонатора по фиг. 5 с балансом, эксцентрично установленным на подвижную поворотную опору.
На фиг. 8 показана одна из модификаций резонатора по фиг. 5, в котором первая и вторая промежуточные пластины являются скелетными, с целью уменьшения их инерции и исключения нежелательных основных форм колебаний.
На фиг. 9 в виде блок схемы показаны наручные или карманные часы с механизмом, включающим в себя резонатор по изобретению, который содержит несколько изгибаемых шарнирных механизмов, расположенных последовательно.
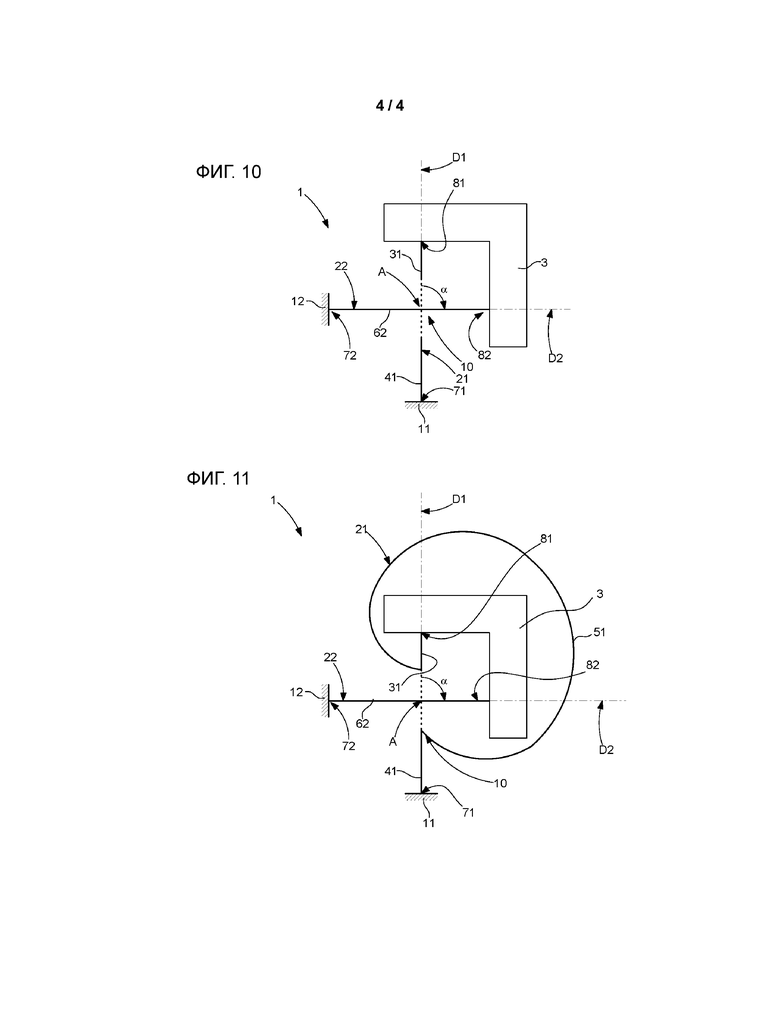
На фиг. 10 на виде в плане обобщены геометрические компоновки резонатора, в данном случае первый упругий узел лишен первой промежуточной пластины.
На фиг. 11, аналогично фиг. 10, показана первая промежуточная пластина любой формы, которая полностью окружает подвижную поворотную опору в плоскости изгибаемого шарнирного механизма.
Осуществление изобретения
Изобретение относится к часовому резонансному механизму 1, содержащему поворотный грузик 2, который выполнен с возможностью шарнирного поворота вокруг виртуальной оси А поворота.
Указанный резонансный механизм 1 включает в себя первую неподвижную опору 11 и вторую неподвижную опору 12, к которым прикреплен изгибаемый шарнирный механизм 10. Указанный изгибаемый шарнирный механизм 10 содержит подвижную поворотную опору 3, которая соединена с первой неподвижной опорой 11 при помощи первого упругого узла 21, являющегося частью изгибаемого шарнирного механизма 10, и соединена со второй неподвижной опорой 12 при помощи второго упругого узла 22, также являющегося частью изгибаемого шарнирного механизма 10.
Первый упругий узел 21 и второй упругий узел 22 совместно определяют виртуальную ось А поворота.
Поворотный грузик 2 может быть прикреплен к поворотной опоре 3, как это показано на фиг. 6, либо образован поворотной опорой 3.
Согласно изобретению изгибаемый шарнирный механизм 10 является планарным. Это значит, что если изгибаемый шарнирный механизм 10 рассечь в плоскости, то плоскость рассечет каждый из образующих его элементов и разделит механизм на два непрерывных узла одинаковой формы и одинакового размера, по меньшей мере в проекции на плоскость, которые, в частности, будут идентичны. Следует понимать, что термин «планарный механизм» означает одноуровневый механизм, т.е. это трехмерный объект, полученный в результате экструзии бинаправленной геометрической формы. В частности, указанный планарный изгибаемый шарнирный механизм 10 можно изготовить на одном уровне при помощи Liga-технологии или аналогичного метода.
С каждой стороны от виртуальной оси А поворота первый упругий узел 21 включает в себя первую наружную гибкую пластину 31 и первую внутреннюю гибкую пластину 41, соединенные между собой при помощи первой промежуточной пластины 51, которая жестче каждой из указанных пластин. Первая наружная гибкая пластина 31 и первая внутренняя гибкая пластина 41 совместно определяют первое направление D1, проходящее через виртуальную ось А поворота. Более конкретно, первая наружная гибкая пластина 31 и первая внутренняя гибкая пластина 41 расположены с обеих сторон от виртуальной оси А поворота.
Второй упругий узел 22 включает в себя вторую гибкую пластину 62, предпочтительно проходящую через виртуальную ось А поворота и определяющую второе направление D2, отличающееся от первого направления D1 и проходящее через виртуальную ось А поворота, где оно пересекается с первым направлением D1 и образует с ним угол б. В одной из предпочтительных компоновок виртуальная ось А поворота проходит прямо посредине материала второй гибкой пластины 62.
Более конкретно, первая наружная гибкая пластина 31 и первая внутренняя гибкая пластина 41 не соприкасаются друг с другом.
Более конкретно, каждая из первой наружной гибкой пластины 31 и первой внутренней гибкой пластины 41 удалена от второй гибкой пластины 62.
Более конкретно, первая наружная гибкая пластина 31 и первая внутренняя гибкая пластина 41 являются наиболее гибкими деталями первого упругого узла 21. По одной из конкретных модификаций, изображенных на фиг. 1-8, первый упругий узел 21 включает в себя лишь первую промежуточную пластину 51, первую наружную гибкую пластину 31 и первую внутреннюю гибкую пластину 41. По одной из конкретных модификаций, первая наружная гибкая пластина 31 и первая внутренняя гибкая пластина 41 имеют идентичное сечение.
На фиг. 2 и 3 первый упругий узел 21 и второй упругий узел 22 имеют разную жесткость. Для симметрирования их жесткости и даже их деформации второй упругий узел 22, например, можно искусственно сделать толще в том же месте, что и первый упругий узел.
Таким образом, что касается второго упругого узла 22, вторая упругая пластина 62 может быть единственной пластиной, как это показано на фиг. 2 и 3, либо серией попеременных пластин с разной гибкостью, как в первом упругом узле 21. Таким образом, в модификации по фиг. 1 и 4-8 второй упругий узел 22 включает в себя вторую наружную гибкую пластину 32 и вторую внутреннюю гибкую пластину 42, с каждой стороны от второй промежуточной пластины 52, которая жестче, чем каждая из вышеуказанных пластин и образует совместно с ними вторую гибкую пластину 62. В одной из конкретных модификаций вторая промежуточная пластина 52 проходит через виртуальную ось А поворота, т.е. пересекается прямо посредине виртуальной осью А поворота. В одной из конкретных модификаций вторая наружная гибкая пластина 32 и вторая внутренняя гибкая пластина 42 имеют одинаковое сечение.
Предпочтительно первый упругий узел 21 и второй упругий узел 22 жестко прикреплены к первой неподвижной опоре 11 и ко второй неподвижной опоре 12 соответственно.
Более конкретно, вторая гибкая пластина 62 прикреплена ко второй неподвижной опоре 12 во второй наружной точке 72 крепления, а к поворотной опоре 3 – во второй внутренней точке 82 крепления. Вторая наружная точка 72 крепления и вторая внутренняя точка 82 крепления расположены с обеих сторон от прямой линии, параллельной направлению D1, определяемому первым упругим узлом 21, и проходящей через виртуальную ось А поворота. Более конкретно, вторая наружная точка 72 крепления и вторая внутренняя точка 82 крепления расположены с обеих сторон от виртуальной оси А поворота. Еще более конкретно, вторая наружная точка 72 крепления и вторая внутренняя точка 82 крепления выровнены с виртуальной осью А поворота, как это показано на фигурах.
Аналогичным образом, первая внутренняя гибкая пластина 41 прикреплена к неподвижной опоре 11 в первой наружной точке 71 крепления, а первая наружная гибкая пластина 31 прикреплена к поворотной опоре 3 в первой внутренней точке 81 крепления.
Хотя можно допустить, что первое направление D1 и второй направление D2 являются криволинейными направлениями, пересекающими виртуальную ось А поворота, моделирование осуществлять проще с использованием прямых элементов. Так, в одной из конкретных модификаций первое направление D1 является прямым. В другой конкретной модификации второе направление D2 является прямым. В еще одной конкретной модификации, изображенной на фиг. 2-8, первое направление D1 является прямым и второе направление D2 является прямым.
В частности, первое направление D1 является прямым и определяет прямолинейное направление по меньшей мере одной из упругих пластин, которая является прямой пластиной, а второе направление D2 является прямым и определяет прямолинейное направление по меньшей мере одной из упругих пластин, которая является прямой пластиной.
Аналогичным образом, изобретение проиллюстрировано одним из наиболее предпочтительных примеров, где большинство гибких пластин, определяющих гибкий шарнир изгибаемого шарнирного механизма 10 и виртуальную ось А поворота, являются прямыми гибкими пластинами. Тем не менее, допустимо использование других геометрических форм, например змеевидных или иных.
В частности, первый упругий узел 21 окружает второй упругий узел 22 в плоскости изгибаемого шарнирного механизма 10.
В частности, первая промежуточная пластина 51 полностью окружает подвижную поворотную опору 3 в плоскости изгибаемого шарнирного механизма 10, как это показано на фиг. 3. Между тем, в модификациях по фиг. 2 и 4-8 подвижная поворотная опора 3 находится снаружи от первой промежуточной пластины 51.
Таким образом, у концов пластин поворотная опора 3 поворачивается вокруг виртуальной оси А поворота, которая находится в месте пересечения направлений двух пластин. Для того чтобы частота не зависела от положения в гравитационном поле, мгновенный центр вращения как поворотной опоры 3, так и прикрепленного к ней поворотного грузика 2 (если имеется), не должен смещаться вместе с углом поворота. Поэтому для оптимального функционирования резонансного механизма 1 центр инерции узла, образуемого поворотным грузиком 2 и поворотной опорой 3, находится на виртуальной оси А поворота. На фиг. 6 показан подобный пример, в котором поворотный грузик 2 образован балансом, который эксцентрично прикреплен к поворотной опоре 3.
В одной из предпочтительных модификаций для сведения к минимуму инерциального эффекта, создаваемого первым упругим узлом 21 и вторым упругим узлом 22, по меньшей мере гибкие детали первого упругого узла 21 и/или второго упругого узла 22 являются скелетными, что уменьшает до минимума их массу и предотвращает нежелательные основные формы колебаний. На самом деле, фактически это означает наличие первой промежуточной пластины 51 и второй промежуточной пластины 52.
Предпочтительно наружные концы первого упругого узла 21 и второго упругого узла 22 жестко соединены с первой неподвижной опорой 11 и со второй неподвижной опорой 12 соответственно, а внутренние концы первого упругого узла 21 и второго упругого узла 22 жестко соединены с поворотной опорой 3.
В одной из конкретных модификаций, с оптимизированным изохронизмом, первое направление D1 и второе направление D2 образуют между собой угол, составляющий от 70° до 87°, в частности равный 83,65°, как это показано на фиг. 5-7. В патенте CH 01979/14 на имя Своч груп рисёч энд девелопмент Лтд., который включен здесь по ссылке, раскрывается часовой резонатор с пересекающимися пластинами и объясняется важность величины данного конкретного угла.
Для того чтобы частота резонансного механизма 1 не зависела, насколько это возможно, от его положения в гравитационном поле, важно определить место пересечения направлений пластин относительно их зажимной точки.
В одной из конкретных модификаций, первая наружная гибкая пластина 31 жестко соединена с первой промежуточной пластиной 51 в первой наружной точке 310 крепления, а первая внутренняя гибкая пластина 41 жестко соединена с первой промежуточной пластиной 51 в первой внутренней точке 410 крепления. В одной из предпочтительных компоновок, в проекции первого направления D1, первое промежуточное расстояние d1, определяемое расстоянием между первой наружной точкой 310 крепления и первой внутренней точкой 410 крепления, и первое общее расстояние L1, определяемое расстоянием между, с одной стороны, первой наружной точкой 311 крепления первой наружной пластины 31 к первой неподвижной опоре 11 и, с другой стороны, первой внутренней точкой 411 крепления первой внутренней пластины 41 к поворотной опоре 3, определяют отношение d1/L1, составляющее от 0,05 до 0,25, в частности равное 0,20.
Еще более конкретно, в проекции первого направления D1, первый радиус r1, определяемый расстоянием между первой внутренней точкой 411 крепления и виртуальной осью А поворота, и первое общее расстояние L1 определяют отношение r1/L1, составляющее от 0,05 до 0,3, в частности равное 0,185.
Аналогичным образом, в одной из конкретных модификаций вторая наружная гибкая пластина 32 жестко соединена со второй промежуточной пластиной 52 во второй наружной точке 320 крепления, а вторая внутренняя гибкая пластина 42 жестко соединена со второй промежуточной пластиной 52 во второй внутренней точке 420 крепления. В одной из предпочтительных компоновок в проекции второго направления D2 второе промежуточное расстояние d2, определяемое расстоянием между второй наружной точкой 320 крепления и второй внутренней точкой 420 крепления, и второе общее расстояние L2, определяемое расстоянием между, с одной стороны, второй наружной точкой 321 крепления второй наружной пластины 32 ко второй неподвижной опоре 12 и, с другой стороны, второй внутренней точкой 421 крепления второй внутренней пластины 42 к поворотной опоре 3, определяют отношение d2/L2, составляющее от 0,05 до 0,25, в частности равное 0,20.
Еще более конкретно, в проекции направления D2 второй радиус r2, определяемый расстоянием между второй внутренней точкой 421 крепления и виртуальной осью А поворота, и второе общее расстояние L2 определяют отношение r2/L2, составляющее от 0,05 до 0,3, в частности равное 0,185.
В одной из конкретных модификаций первое промежуточное расстояние d1, первое общее расстояние L1, второе промежуточное расстояние d2 и второе общее расстояние L2 связаны соотношениями d1=d2 и L1=L2.
В другой конкретной модификации первый радиус r1, первое общее расстояние L1, второй радиус r2 и второе общее расстояние L2 связаны соотношениями r1=r2 и L1=L2.
В другой конкретной модификации d1=d2, r1=r2, а L1=L2.
Для каждой из величин в соотношении d1/L1 = d2/L2 оптимальный угол б и оптимальное соотношение r1/L1=r2/L2 можно подобрать так, чтобы частота не зависела ни от амплитуды, ни от ориентации в гравитационном поле. Для определения оптимальных значений требуется моделирование, а использование прямых гибких пластин упрощает проведение расчетов.
Предпочтительно, как показано на фиг. 7, пропорции наиболее жестких деталей 51 и 52 первого упругого узла 21 и второго упругого узла 22 между соответствующими точками 310, 410 и 320, 420 крепления относительно виртуальной оси А поворота, где «de» является расстоянием с наружной стороны между осью А и точкой крепления, а «di» является расстоянием с внутренней стороны между осью А и точкой крепления, выбирают так, чтобы de/(de+di) = 1/3, а di/(de+di) = 2/3.
Изобретение лучше подходит для монолитной конструкции. По одному из предпочтительных вариантов осуществления изобретения первая неподвижная опора 11, вторая неподвижная опора 12 и изгибаемый шарнирный механизм 10 образуют цельный узел. Цельный узел может быть получен за счет использования технологии микроэлектромеханических систем или Liga-технологии, или т.п. и изготовлен из кремния с температурной компенсацией или аналогичного материала, в частичности за счет локального наращивания диоксида кремния на отдельных участках детали, используемой для данных целей, если указанный цельный узел изготавливают из кремния.
Часовой резонансный механизм 1 может содержать несколько подобных изгибаемых шарнирных механизмов 10, расположенных, для увеличения общего углового перемещения, последовательно и находящихся в параллельных плоскостях и вокруг одной и той же виртуальной оси А поворота.
Изобретение также относится к часовому механизму 100, включающему в себя по меньшей мере один подобный резонансный механизм 1.
Изобретение также относится к наручным или карманным часам 1000, включающим в себя по меньшей мере один часовой механизм 100 данного типа.
Изобретение обладает рядом преимуществ:
- простота изготовления, за счет группирования функциональных элементов в одной плоскости;
- малая толщина механизма;
- частота не зависит от положения в гравитационном поле;
- частота не зависит от амплитуды.
Часовой резонансный механизм (1) с поворотным грузиком (2), поворачивающимся вокруг виртуальной оси (А) поворота, содержит изгибаемый шарнирный механизм (10), первую (11) и вторую (12) неподвижные опоры, к которым соответственно при помощи первого упругого узла (21) и второго упругого узла (22), которые совместно определяют указанную виртуальную ось поворота, прикреплена поворотная опора (3), к которой прикреплен поворотный грузик (2), при этом указанный изгибаемый шарнирный механизм (10) является планарным, причем первый упругий узел (21) включает в себя, с обеих сторон от виртуальной оси (А) поворота, первую наружную гибкую пластину (31) и первую внутреннюю гибкую пластину (41), соединенные между собой при помощи первой промежуточной пластины (51), которая жестче каждой из вышеуказанных пластин, и совместно определяющие первое направление (D1), проходящее через виртуальную ось (А) поворота, а второй упругий узел (22) включает в себя вторую гибкую пластину (62), определяющую второе направление (D2), проходящее через виртуальную ось (А) поворота. 3 н. и 23 з.п. ф-лы, 11 ил.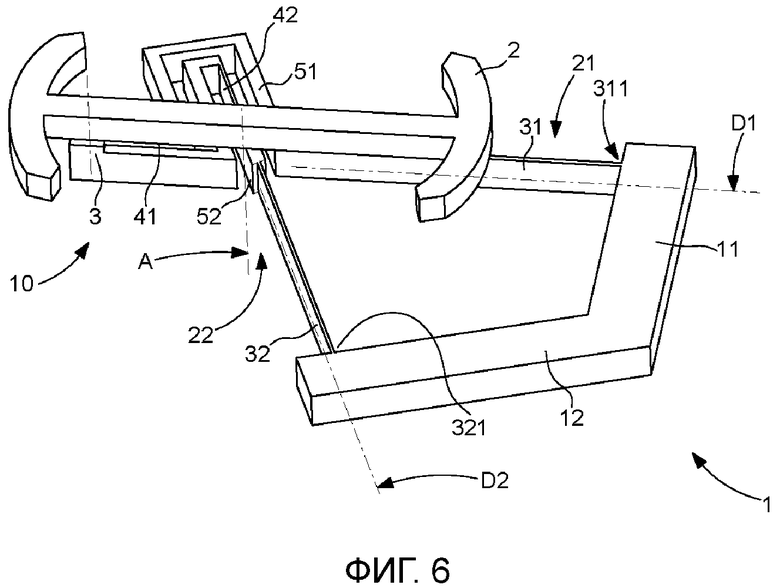
1. Часовой резонансный механизм (1), содержащий поворотный грузик (2), выполненный с возможностью шарнирного поворота вокруг виртуальной оси (А) поворота, причем указанный резонансный механизм (1) содержит первую неподвижную опору (11) и вторую неподвижную опору (12), к которым прикреплен изгибаемый шарнирный механизм (10), который содержит поворотную опору (3), соединенную с указанной первой неподвижной опорой (11) при помощи первого упругого узла (21) и соединенную с указанной второй неподвижной опорой (12) при помощи второго упругого узла (22), который вместе с указанным первым упругим узлом (21) определяет указанную виртуальную ось (А) поворота, при этом указанный поворотный грузик (2) прикреплен к указанной поворотной опоре (3) или образован указанной поворотной опорой (3), отличающийся тем, что указанный изгибаемый шарнирный механизм (10) является планарным, при этом указанный первый упругий узел (21) включает в себя, с каждой стороны от указанной виртуальной оси (А) поворота, первую наружную гибкую пластину (31) и первую внутреннюю гибкую пластину (41), соединенные друг с другом при помощи первой промежуточной пластины (51), более жесткой, чем каждая из вышеуказанных пластин, и совместно определяющие первое направление (D1), проходящее через указанную виртуальную ось (А) поворота, при этом указанный второй упругий узел (22) включает в себя вторую гибкую пластину (62), определяющую второе направление (D2), которое проходит через виртуальную ось (А) поворота, причем указанная вторая гибкая пластина (62) прикреплена к указанной второй неподвижной опоре (12) во второй наружной точке (72) крепления, а к указанной поворотной опоре (3) - во второй внутренней точке (82) крепления, при этом указанная вторая наружная точка (72) крепления и указанная вторая внутренняя точка (82) крепления расположены с обеих сторон от прямой линии, параллельной указанному первому направлению (D1) и проходящей через указанную виртуальную ось (А) поворота.
2. Механизм (1) по п. 1, отличающийся тем, что указанная первая наружная гибкая пластина (31) и указанная первая внутренняя гибкая пластина (41) расположены с обеих сторон от указанной виртуальной оси (А) поворота.
3. Механизм (1) по п. 1, отличающийся тем, что указанная вторая наружная точка (72) крепления и указанная вторая внутренняя точка (82) крепления расположены с обеих сторон от прямой линии, параллельной указанному первому направлению (D1), определяемому указанным первым упругим узлом (21), и проходящей через указанную виртуальную ось (А) поворота.
4. Механизм (1) по п. 1, отличающийся тем, что указанная вторая наружная точка (72) крепления и указанная вторая внутренняя точка (82) крепления выровнены с указанной виртуальной осью (А) поворота.
5. Механизм (1) по п. 1, отличающийся тем, что каждая из указанной первой наружной гибкой пластины (31) и указанной первой внутренней гибкой пластины (41) удалена от указанной второй гибкой пластины (62).
6. Механизм (1) по п. 1, отличающийся тем, что указанная виртуальная ось (А) поворота проходит через материал указанной второй гибкой пластины (62).
7. Механизм (1) по п. 1, отличающийся тем, что указанная первая наружная гибкая пластина (31) и указанная первая внутренняя гибкая пластина (41) являются наиболее гибкими деталями указанного первого упругого узла (21).
8. Механизм (1) по п. 1, отличающийся тем, что указанный второй упругий узел (22) включает в себя вторую наружную гибкую пластину (32) и вторую внутреннюю гибкую пластину (42), расположенные с обеих сторон от второй промежуточной пластины (52), которая жестче, чем вышеуказанные пластины, и образует вместе с ними вторую гибкую пластину (62).
9. Механизм (1) по п. 1, отличающийся тем, что вышеуказанное первое направление (D1) является прямым.
10. Механизм (1) по п. 1, отличающийся тем, что вышеуказанное второе направление (D2) является прямым.
11. Механизм (1) по п. 1, отличающийся тем, что указанное первое направление (D1) является прямым и определяет прямолинейное направление по меньшей мере одной упругой пластины, которая является прямой пластиной, и указанное второе направление (D2) является прямым и определяет прямолинейное направление по меньшей мере одной упругой пластины, которая является прямой пластиной.
12. Механизм (1) по п. 1, отличающийся тем, что указанный первый упругий узел (21) окружает указанный второй упругий узел (22) в плоскости указанного изгибаемого шарнирного механизма (10).
13. Механизм (1) по п. 1, отличающийся тем, что центр инерции узла, образованного указанным поворотным грузиком (2) и указанной поворотной опорой (3), находится на указанной виртуальной оси (А) поворота.
14. Механизм (1) по п. 1, отличающийся тем, что по меньшей мере гибкие детали указанного первого упругого узла (21) и/или указанного второго упругого узла (22) являются скелетными для сведения к минимум их массы и предотвращения нежелательных основных форм колебаний.
15. Механизм (1) по п. 1, отличающийся тем, что наружные концы указанного первого упругого узла (21) и указанного второго упругого узла (22) жестко соединены с указанной первой неподвижной опорой (11) и с указанной второй неподвижной опорой (12) соответственно, при этом внутренние концы указанного первого упругого узла (21) и указанного второго упругого узла (22) жестко соединены с указанной поворотной опорой (3).
16. Механизм (1) по п. 9, отличающийся тем, что указанное второе направление (D2) является прямым, причем указанные первое направление (D1) и второе направление (D2) образуют между собой угол, составляющий от 70° до 87°.
17. Механизм (1) по п. 1, отличающийся тем, что указанная первая наружная гибкая пластина (31) жестко соединена с указанной первой промежуточной пластиной (51) в первой наружной точке (310) крепления, а указанная первая внутренняя гибкая пластина (41) жестко соединена с указанной первой промежуточной пластиной (51) в первой внутренней точке (410) крепления, причем в проекции указанного первого направления (D1), которое является прямым, первое промежуточное расстояние (d1), определяемое расстоянием между указанной первой наружной точкой (310) крепления и указанной первой внутренней точкой (410) крепления, и первое общее расстояние (L1), определяемое расстоянием между, с одной стороны, первой наружной точкой (311) крепления указанной первой наружной пластины (31) к указанной первой неподвижной опоре (11) и, с другой стороны, первой внутренней точкой (411) крепления указанной первой внутренней пластины (41) к указанной поворотной опоре (3), определяют отношение d1/L1, составляющее от 0,05 до 0,25.
18. Механизм (1) по п. 17, отличающийся тем, что в проекции указанного первого направления (D1) первый радиус (r1), определяемый расстоянием между указанной первой внутренней точкой (411) крепления и указанной виртуальной осью (А) поворота, и указанное первое общее расстояние (L1) определяют отношение r1/L1, составляющее от 0,05 до 0,3.
19. Механизм (1) по п. 1, отличающийся тем, что указанная вторая наружная гибкая пластина (32) жестко соединена с указанной второй промежуточной пластиной (52) во второй наружной точке (320) крепления, а указанная вторая внутренняя гибкая пластина (42) жестко соединена с указанной второй промежуточной пластиной (52) во второй внутренней точке (420) крепления, причем в проекции указанного второго направления (D2), которое является прямым, второе промежуточное расстояние (d2), определяемое расстоянием между указанной второй наружной точкой (320) крепления и указанной второй внутренней точкой (420) крепления, и второе общее расстояние (L2), определяемое расстоянием между, с одной стороны, второй наружной точкой (321) крепления указанной второй наружной пластины (32) к указанной второй неподвижной опоре (12) и, с другой стороны, второй внутренней точкой (421) крепления указанной второй внутренней пластины (42) к указанной поворотной опоре (3), определяют отношение d2/L2, составляющее от 0,05 до 0,25.
20. Механизм (1) по п. 19, отличающийся тем, что в проекции указанного второго направления (D2) второй радиус (r2), определяемый расстоянием между указанной второй внутренней точкой (421) крепления и указанной виртуальной осью (А) поворота, и указанное второе общее расстояние (L2) определяют отношение r2/L2, составляющее от 0,05 до 0,3.
21. Механизм (1) по п. 17, отличающийся тем, что указанная вторая наружная гибкая пластина (32) жестко соединена с указанной второй промежуточной пластиной (52) во второй наружной точке (320) крепления, а указанная вторая внутренняя гибкая пластина (42) жестко соединена с указанной второй промежуточной пластиной (52) во второй внутренней точке (420) крепления, причем в проекции указанного второго направления (D2), которое является прямым, второе промежуточное расстояние (d2), определяемое расстоянием между указанной второй наружной точкой (320) крепления и указанной второй внутренней точкой (420) крепления, и второе общее расстояние (L2), определяемое расстоянием между, с одной стороны, второй наружной точкой (321) крепления указанной второй наружной пластины (32) к указанной второй неподвижной опоре (12) и, с другой стороны, второй внутренней точкой (421) крепления указанной второй внутренней пластины (42) к указанной поворотной опоре (3), определяют отношение d2/L2, составляющее от 0,05 до 0,25, при этом указанное первое промежуточное расстояние (d1), указанное первое общее расстояние (L1), указанное второе промежуточное расстояние (d2) и указанное второе общее расстояние (L2) связаны соотношениями d1=d2 и L1=L2.
22. Механизм (1) по п. 18, отличающийся тем, что указанная вторая наружная гибкая пластина (32) жестко соединена с указанной второй промежуточной пластиной (52) во второй наружной точке (320) крепления, а указанная вторая внутренняя гибкая пластина (42) жестко соединена с указанной второй промежуточной пластиной (52) во второй внутренней точке (420) крепления, причем в проекции указанного второго направления (D2), которое является прямым, второе промежуточное расстояние (d2), определяемое расстоянием между указанной второй наружной точкой (320) крепления и указанной второй внутренней точкой (420) крепления, и второе общее расстояние (L2), определяемое расстоянием между, с одной стороны, второй наружной точкой (321) крепления указанной второй наружной пластины (32) к указанной второй неподвижной опоре (12) и, с другой стороны, второй внутренней точкой (421) крепления указанной второй внутренней пластины (42) к указанной поворотной опоре (3), определяют отношение d2/L2, составляющее от 0,05 до 0,25, при этом в проекции указанного второго направления (D2) второй радиус (r2), определяемый расстоянием между указанной второй внутренней точкой (421) крепления и указанной виртуальной осью (А) поворота, и указанное второе общее расстояние (L2) определяют отношение r2/L2, составляющее от 0,05 до 0,3, причем указанный первый радиус (r1), указанное первое общее расстояние (L1), указанный второй радиус (r2) и указанное второе общее расстояние (L2) связаны соотношениями r1=r2 и L1=L2.
23. Механизм (1) по п. 1, отличающийся тем, что указанная первая неподвижная опора (11), указанная вторая неподвижная опора (12) и указанный изгибаемый шарнирный механизм (10) образуют цельный узел из кремния с температурной компенсацией.
24. Механизм (1) по п. 1, отличающийся тем, что указанный резонансный механизм содержит несколько указанных изгибаемых шарнирных механизмов (10), установленных, для увеличения общего углового перемещения, последовательно и расположенных в параллельных плоскостях и вокруг одной и той же виртуальной оси (А) поворота.
25. Часовой механизм (100), включающий в себя по меньшей мере один часовой резонансный механизм (1) по п. 1.
26. Часы (1000), включающие в себя по меньшей мере один часовой механизм (100) по п. 25.
| US 9134705 B2, 04.09.2014 | |||
| ОТБОРНАЯ ТРУБКА ГАЗОВОЙ ЦЕНТРИФУГИ | 1992 |
|
RU2037335C1 |
| Устройство для определения вероятностных характеристик случайного процесса | 1981 |
|
SU1013949A1 |
| WO 2012010408 A1, 26.01.2012. | |||

