Изобретение относится к устройствам автоматического кормления аквакультуры и может использоваться для разведения рыб или в аквариумах.
Из уровня техники известно решение по патенту CN 206576077 U, опубл.: 24.10.2017., в котором раскрыто устройство автоматической кормушки для аквариума, содержащее кормушку с дозатором, блок управления, датчик давления, модуль Bluetooth, модуль передачи данных по беспроводной связи, модуль аварийной сигнализации, модуль аварийной сигнализации отключения питания, камера слежения с поворотом на 360 градусов. Устройство управления контролирует работу с помощью приложения для мобильного телефона.
Хотя решение позволяет вести облачный контроль за аквакультурой, управление построено в рамках прямой связи сервер - кормушка, что в случае организации большого облачного сервиса приведет к нагрузках на сервер, который должен будет одновременно вести обработку параметров каждой отдельной кормушки. Если среди последних подключены к облачному сервису от одного IP-адреса будут одновременно множество кормушек, сервер не сможет стабильно обрабатывать потоки данных от таких устройств. Например, десятки автоматических кормушек подключены в сеть и выходят «в облако» через один интернет-канал. Это сразу снижает эффективность, скорость, надежность передачи данных от всех устройств на приложение пользователя.
Наиболее близким аналогом является патент US 7222583, опубл.: 29.05.2007., в котором раскрыто устройство автоматического кормления для рыб, имеющее 2 бункера и нагнетатель. Из первого бункера под действием вращающегося рассеивателя корм попадает во второй бункер, где стоит вторая рассеивающая пластина. При вращении обоих корм сначала перемешивается пластиной (обрезается), сыплется во второй бункер и дозируется пластиной, затем падает в отверстие нагнетателя, откуда под действием нагнетающего воздуха подается в аквариум. А воздух нагнетается вращением второй крыльчатки, функция которой - нагнетание воздуха.
В решении кормушки по прототипу таким образом имеется 2 бункера и 3 отдельных рабочих механизма для дозации и нагнетания корма, что является технической проблемой, усложняющей конструкцию кормушки.
Кроме того, что автоматическая кормушка по прототипу не способна к удаленному управлению, в т.ч. через облачный сервис, что неудобно в обслуживании множества кормушек в больших аквасистемах.
Задачей изобретения является устранение указанных недостатков.
Техническим результатом изобретения является реализация возможности дозации и нагнетания корма с помощью 1 механизма и 1 бункера, с одновременной возможностью облачного управления устройством контроля за аквакультурой, имеющего эффективность, стабильную скорость и надежность передачи данных от всех аналогичных устройств, объединенных в систему, на приложение пользователя. Кроме того, изобретение позволяет разбрасывать корм на заданный пользователем радиус/расстояние в режиме разброса по всей площади поверхности, а также устройство не требует калибровки и замены компонентов при смене размера кормов.
Указанный технический результат достигается за счет того, что заявлено устройство автоматического кормления аквакультуры, состоящее из бункера, имеющего плату управления, загрузочную горловину, корпус раздаточного механизма, внутри которого расположены: мотор управления заслонкой, который в нижней части раздаточного механизма соединен с заслонкой тарельчатого типа; мотор управления рассеивателем центробежного типа действия, и соединенный с ним, отличающееся тем, что в головной части бункера установлена плата управления устройством, а заслонка соединена с мотором управления заслонкой толкателями, в центре имеет отверстие, через которое свободно пропущен вал управления рассеивателем, причем рассеиватель выполнен в виде крыльчатки. Предпочтительно, заслонка выполнена наклонной. Предпочтительно, крыльчатка имеет изогнутое основание.
Предпочтительно, на изогнутом основании крыльчатки установлена изогнутая лопатка. В головной части бункера расположен тензодатчик, соединенный с платой управления. Предпочтительно, устройство закреплено на кронштейне, имеющем разъемы для подключения внешних устройств.
Предпочтительно, разъемы выполнены для подключения датчиков, исполнительных устройств, сети интернет, питания камеры, внешнего питания.
Предпочтительно, головная часть бункера соединена с основной частью бункера через виброизоляционную прокладку.
Предпочтительно, в торцевой части заслонка имеет пазы для тонкого дозирования корма.
Предпочтительно, вал мотора вращения рассеивателем на конце установлен в подшипник.
Предпочтительно, подшипник закреплен на кронштейне, соединенном с корпусом раздаточного механизма.
Предпочтительно, подшипник закреплен на пластине, соединенной с корпусом раздаточного механизма с помощью стоек.
Предпочтительно, бункер свободно закреплен за головную часть через тензодатчик. Предпочтительно, плата управления содержит блок управления беспроводной связью. Предпочтительно, блок управления беспроводной связью выполнен содержащим GSM модуль и Bluetooth модуль.
Также заявлен способ удаленного управления вышеописанного устройства, характеризующийся прямой передачей данных на облачный сервер сети интернет, с помощью канала мобильных данных, модуля GSM или через проводную сеть Ethernet, с использованием шифрования, а также организацией распределенной сети между однотипными устройствами, с помощью модуля Bluetooth-mesh, причем подключение к дозатору, его настройку и управление настройками, контроль за состоянием аквакультуры осуществляют с любого мобильного устройства, с помощью связи Bluetooth, либо через удаленный доступ к облачному серверу.
Предпочтительно, управление кормушкой осуществляют программно от общего блока управления таким образом, что при наступлении заранее заданного момента подачи корма, заслонку поднимают вверх и корм самотеком ссыпается на вращающийся диск рассеивателя, включением мотора управления рассеивателя и регулируя его скорость разбрасывают корм на заданную площадь; причем с помощью тензометрии фиксируют изменение веса бункера с кормом и при достижении заданной дозы, заслонку закрывают, а мотор вращения рассеивателя останавливают.
Предпочтительно, ведут учет параметров воды с помощью датчиков: температуры, кислотности, уровня кислорода.
Предпочтительно, с помощью задвижки, формируют щель, через которую дозируют корм разного размера или через которую регулирует скорость выдачи корма заданного размера.
Предпочтительно, управление крыльчаткой осуществляют с помощью мотора с пониженным тепловыделением, контролем перегрузки и перегрева.
Предпочтительно, осуществляют световую сигнализацию с помощью светодиодов разных цветов.
Предпочтительно, используют одновременно датчик растворенного кислорода, датчик относительной влажности, абсолютного атмосферного давления и температуры воздуха, с помощью которых рассчитывают уровень насыщения растворенного кислорода в процентах.
Краткое описание чертежей
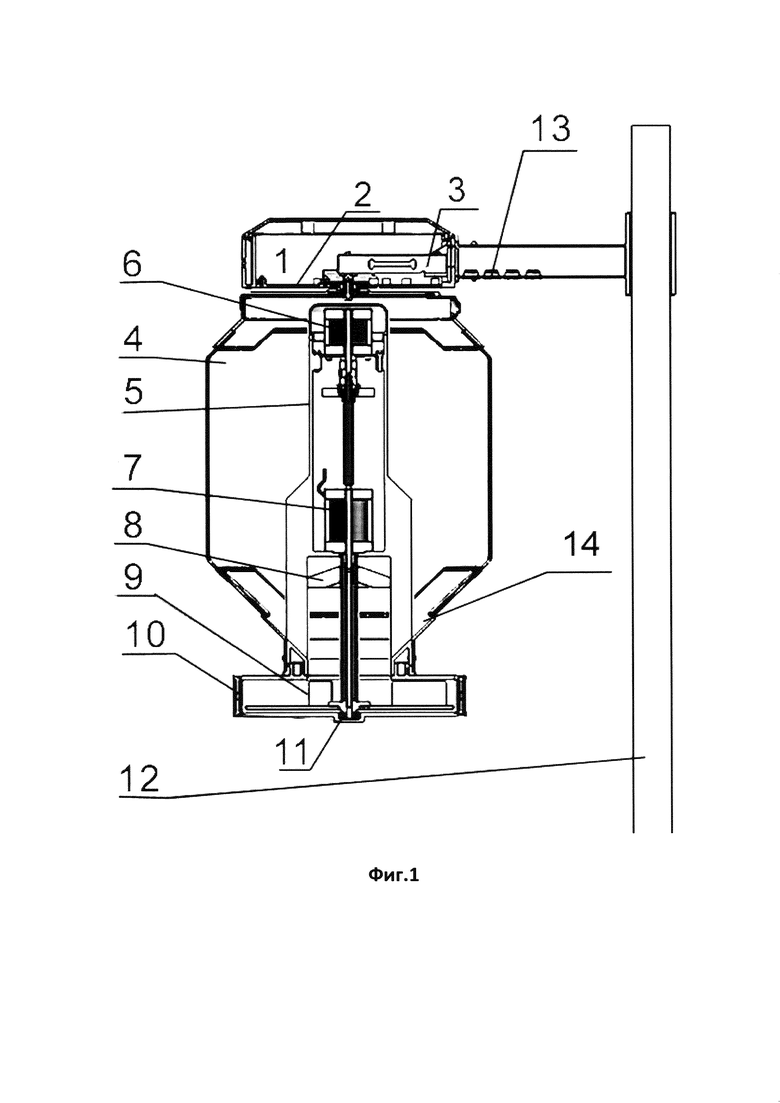
На Фиг. 1 показана схема устройства.
На Фиг. 2 показано устройство наклонной заслонки, вид в разрезе в разных ракурсах.
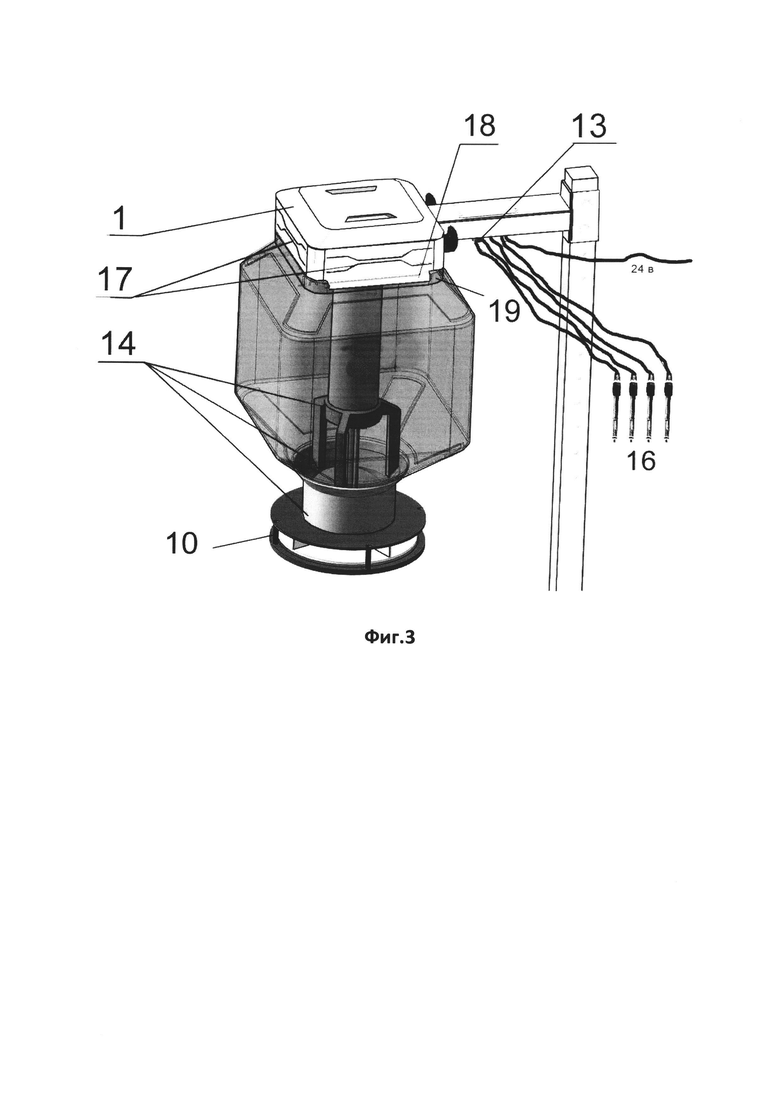
На Фиг. З показано устройство в объеме с подключенными внешними датчиками.
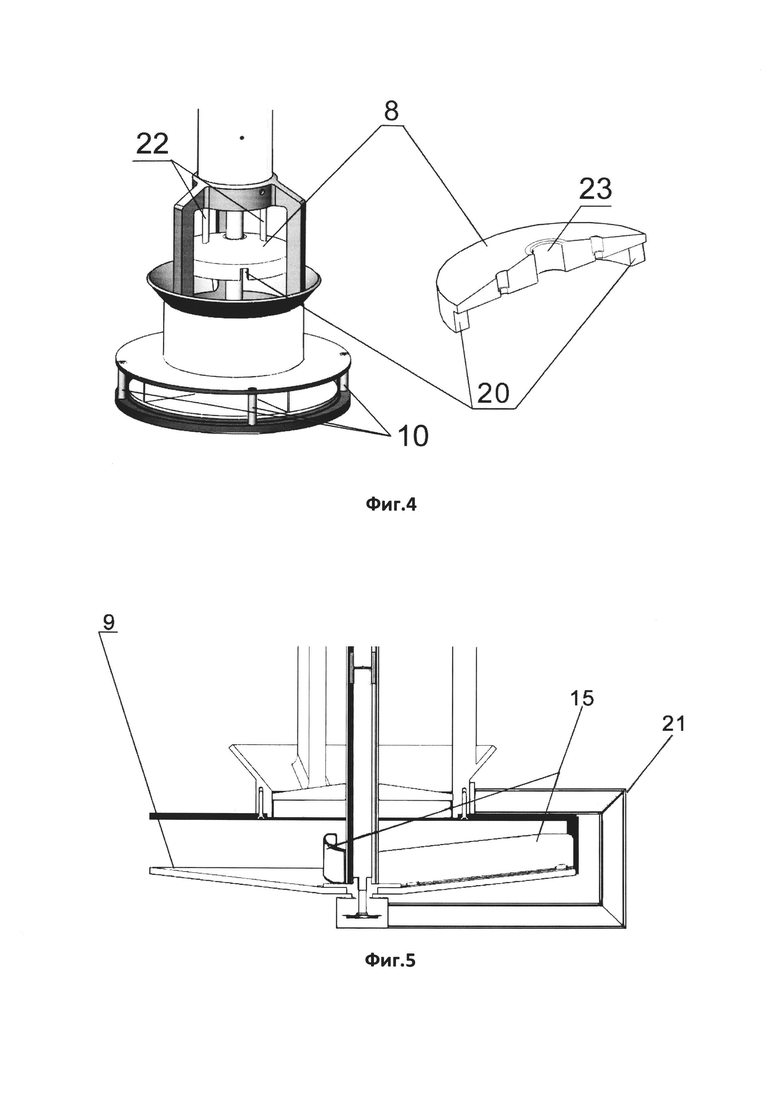
На Фиг. 4 показан пример заслонки с тонким дозатором.
На Фиг. 5 показан пример выполнения крыльчатки с изогнутой лопаткой и П-образным кронштейном для фиксации подшипника.
На чертежах: 1 - головная часть бункера, 2 - плата управления, 3 - тензодатчик, 4 - бункер, 5 - корпус раздаточного механизма, 6 - мотор управления заслонкой, 7 - Мотор управления крыльчаткой/рассеивателем, 8 - заслонка, 9 - Крыльчатка, 10 - стойки, 11 -Подшипник, 12 - кронштейн крепления устройства, 13 - Разъемы подключения внешних датчиков, исполнительных устройств, Интернет, питания камеры внешнего питания, 14 - зона истекателя, 15 - изогнутая лопатка, 16 - Внешние датчики, 17 - Световая сигнализация, 18 - крепление головной части к бункеру, 19 - виброизоляционная прокладка, 20 -паз тонкого дозирования, 21 - П-образный кронштейн, 22 - толкатели, 23 - отверстие заслонки.
Осуществление изобретения
Устройство автоматического кормления аквакультуры (см. Фиг. 1) состоит из бункера 4, имеющего плату управления 2, загрузочную горловину, корпус раздаточного механизма 5, внутри которого расположены: мотор 6 управления заслонкой, который в нижней части раздаточного механизма соединен с заслонкой 8 тарельчатого типа, мотор 7 управления рассеивателем центробежного типа действия, и соединенный с ним. Новым является то, что в головной части 1 бункера 4 установлена плата управления 2 устройством, а заслонка 8 соединена с мотором 6 управления заслонкой толкателями 22, в центре имеет отверстие 23 (см. Фиг. 4), через которое свободно пропущен вал управления рассеивателем, причем рассеиватель выполнен в виде крыльчатки 9. Заслонка 8 может быть выполнена наклонной (см. Фиг. 2).
Крыльчатка 9 может иметь изогнутое основание. Кроме того, на изогнутом основании крыльчатки 9 может быть установлена изогнутая лопатка 15 (см. Фиг. 5). Такой вариант крыльчатки увеличивает радиус разброса корма за счет увеличения времени пребывания корма в крыльчатке 9 и корм успевает приобрести большую скорость перед покиданием крыльчатки.
Крыльчатка 9 разброса корма по бассейну может управляться с помощью мотора с пониженным тепловыделением, контролем перегрузки и перегрева, что обеспечивает высокий срок службы мотора крыльчатки, с возможностью точной плавной регулировки радиуса разброса корма.
Тезодатчик 3 позволяет определять вес дозируемого корма, с помощью высокоточного тензометрического модуля, что обеспечивает точность не хуже 0,01% от взвешиваемого веса. Для этого тензодатчик 3 лучше располагать в головной части 1 бункера 4, соединяя его с платой управления 2.
Само устройство может быть закреплено на кронштейне 12, имеющем разъемы 13 для подключения внешних устройств. Разъемы 13 выполняют для подключения внешних датчиков 16, исполнительных устройств, сети интернет, питания камеры, внешнего питания. Если головная часть 1 бункера 4 будет иметь крепление 18 с основной частью бункера через виброизоляционную прокладку 19, то это ослабит вибрационное воздействие моторов 6 и 7 на кронштейн 12 (см. Фиг. 3).
В торцевой части заслонка 8 может иметь пазы 20 для тонкого дозирования корма. Для снижения вибрации вал мотора вращения рассеивателем на конце может быть установлен в подшипник 11. Подшипник 11 может быть закреплен на пластине, соединенной с корпусом раздаточного механизма с помощью стоек 10 (см. Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 4) или закреплен на кронштейне 21 (см. Фиг. 5), соединенном с корпусом раздаточного механизма.
Кронштейн 21 обеспечивает креплений крыльчатки к корпусу в место стоек 10, когда требуется уменьшить препятствия на пути разбрасывания корма, улучшая кинетику корма, исключает застревание мелкого корма в области стоек 10.
Если бункер 4 будет свободно закреплен за головную часть 1 через тензодатчик, это позволит взвешивать массу выданного корма.
Плата управления 2 может содержать блок управления беспроводной связью, который может быть выполнен содержащим GSM модуль и Bluetooth модуль. Удаленное управление заявленным устройством осуществляется через прямую передачу данных на облачный сервер сети интернет, с помощью канала мобильных данных, модуля GSM или через проводную сеть Ethernet, с использованием шифрования, а также организацией распределенной сети между однотипными устройствами, с помощью модуля Bluetooth-mesh, причем подключение к дозатору, его настройку и управление настройками осуществляют с любого мобильного устройства, с помощью связи Bluetooth, а удаленный контроль за состоянием аквакультуры можно вести через облачный сервер и командами удаленно управлять выдачей корма и другими функциями.
Таким образом, все кормушки могут быть связанны в единую радио mesh сеть, что приводит к повышению эффективности, скорости, надежности передачи данных между всеми устройствами, центральным блоком управлением (при его наличии), а также между устройством и пользователем/смартфоном. Так же не требуется провода для коммутации всех устройств, что снижает стоимость, повышает простоту монтажа, снижает риски обрыва и порчи провода в процессе эксплуатации (что во влажных цехах является большой проблемой).
Управление кормушкой осуществляется программно от общего блока управления. При наступлении момента подачи корма, заслонка поднимается вверх и корм самотеком ссыпается в зону истекателя 14 на вращающийся диск рассеивателя, который разбрасывает корм на заданную площадь. При этом, тензометрия фиксирует изменение веса бункера с кормом. При достижении заданной дозы, заслонка закрывается, диск престает вращаться Периодичность кормления задается в программе. В головной части имеются х-образные светодиодные указатели, которые помогают осуществлять визуальный контроль работы кормушки.
Допустимо, что в процессе управления ведут учет параметров воды с помощью датчиков: температуры, кислотности, уровня кислорода.
А в процессе управления с помощью задвижки или заслонки формируют щель, через которую дозируют корм разного размера или через которую регулирует скорость выдачи корма заданного размера. При этом, управление крыльчаткой осуществляют с помощью мотора с пониженным тепловыделением, контролем перегрузки и перегрева. Допустимо, что в процессе управления осуществляют световую сигнализацию 17 с помощью светодиодов разных цветов.
Если используют одновременно датчик растворенного кислорода, датчик относительной влажности, абсолютного атмосферного давления и температуры воздуха, то и их помощью рассчитывают уровень насыщения растворенного кислорода в процентах.
Заявленное решение позволяет:
- осуществлять дозирование кормов с непрерывным определением веса дозируемого корма, с возможностью установки режима/расписания кормления, выбора веса каждого кормления, установки/определением суммарного суточной дозы кормы, определением веса остатка корма в кормушки, определение отсутствия корма к кормушки, выдачу звукового и светового оповещения/сигнализации при различных авариях или отсутствие корма в кормушки,
- разбрасывать корм на заданный пользователем радиус/расстояние (в режиме разброса по всей площади поверхности, а не только на расстояние радиуса, как все прочие рассеиватели).
Благодаря специальной форме выходного отверстия и наклонной заслонки дозатора удается:
- формировать/устанавливать точное (тонкое/медленное) дозирование путем щелевого приоткрытия заслонки лишь в одном сегменте радиуса (а не по всему периметру радиуса как при ненаклонной заслонки);
- избежать застревания заслонки при ее закрытие, по причине попадания корма в щель между заслонкой и выходным отверстием;
- ворошить/перемешивать корм при каждом открытия заслонки, тем самым предотвращая слеживание, залипание и прочие проблемы с истеканием корма, повышая эффективность дозирования и снижая требования к эксплуатации (так широко распространенные при дозирование сыпучих веществ);
- вести управление размером щели истекание корма, что позволяет точно дозировать (без замены элементов дозатора) корма различных размеров (от 0,2 до 20 мм); ни один другой известный дозатор (без замены внутренних деталей) этого делать не может;
- управлять неограниченным количеством дозаторов с помощью беспроводного канала связи, при этом из устройств формируется mesh-сеть, что в значительной степени снижает расстояние радиоуправления, упрощает монтаж и эксплуатацию устройства; блок радиоуправления также собирает информацию от мультипараметрического анализатора и дозатора и прочих блоков и по беспроводному каналу передает их на шлюз/роутер или мобильное устройство (телефон, планшет);
Когда блок мультипараметрического анализатора встроен в корпус дозатора, он позволяет анализировать параметры воды с помощью внешних датчиков: кислотность, температура, растворенный кислород, редокс-потенциал и другие.
Питание устройства может быть реализовано с постоянным напряжением 24В, с помощью выносного блока питания, подключение питания IP камеры для удаленного видеонаблюдения, может быть осуществлено с помощью дополнительных выходов питания 5В и 12В. Благодаря внутреннему расписанию и логированию всех важных параметров устройство работает автономно, требуя лишь добавления корма и коррекции расписания по мере роста биомассы. Полную информацию о работе устройства можно получить, сделав синхронизацию данных при очередном посещении фермы с аквакультурой, а также в режиме онлайн с облачного сервера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое весовое передвижное раздаточное устройство для сыпучих продуктов | 2023 |
|
RU2799280C1 |
| Роботизированная станция приготовления смесей для кормления животных | 2023 |
|
RU2818415C1 |
| Кормушка для рыб | 1980 |
|
SU942641A1 |
| Кормушка для рыб | 1978 |
|
SU751373A1 |
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ДЛЯ КОРМЛЕНИЯ ДЛЯ УДАЛЕННОГО НАБЛЮДЕНИЯ ЗА ДОМАШНИМ ЖИВОТНЫМ И КОРМЛЕНИЯ | 2014 |
|
RU2675511C2 |
| Роботизированное устройство для обслуживания кормового стола на животноводческих комплексах | 2020 |
|
RU2747167C1 |
| Оптическая система управления процессом приготовления и раздачи кормовой смеси | 2023 |
|
RU2817884C1 |
| Устройство для дозированного кормления животных | 1986 |
|
SU1442150A1 |
| ДОЗАТОР-СМЕСИТЕЛЬ | 2012 |
|
RU2490601C1 |
| Дистанционная система передачи данных для безопасного скармливания грубых кормов пастбищным животным | 2019 |
|
RU2719781C1 |

Устройство включает бункер, плату управления, загрузочную горловину, корпус раздаточного механизма. Внутри корпуса расположены мотор управления заслонкой, который в нижней части раздаточного механизма соединен с заслонкой тарельчатого типа и мотор управления рассеивателем центробежного типа действия, соединенный с ним. Плата управления установлена в головной части бункера. Заслонка соединена с мотором управления заслонкой толкателями, в центре имеет отверстие, через которое свободно пропущен вал управления рассеивателем. Рассеиватель выполнен в виде крыльчатки. Способ управления устройством предусматривает передачу данных на облачный сервер сети интернет. Подключение к дозатору, его настройку и управление настройками осуществляют мобильного устройства. Устройство управляется дистанционно, не требует калибровки и замены компонентов при смене размера кормов. 2 н. и 20 з.п. ф-лы, 5 ил.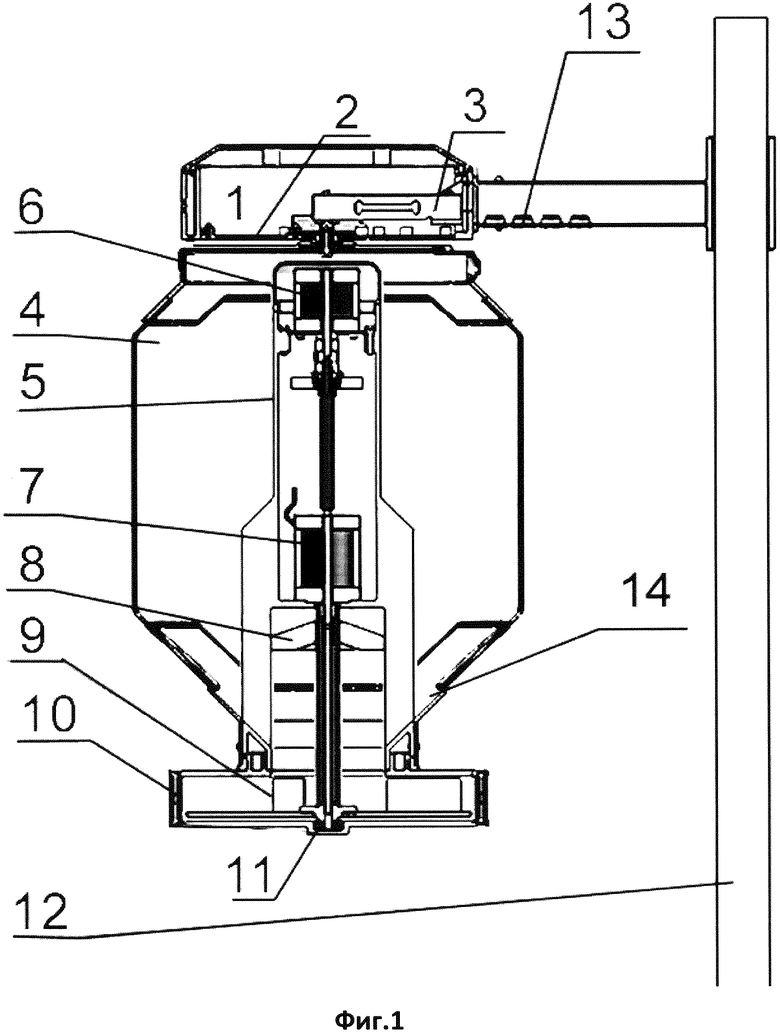
1. Устройство автоматического кормления аквакультуры, состоящее из бункера, имеющего плату управления, загрузочную горловину, корпус раздаточного механизма, внутри которого расположены: мотор управления заслонкой, который в нижней части раздаточного механизма соединен с заслонкой тарельчатого типа; мотор управления рассеивателем центробежного типа действия, соединенный с ним, отличающееся тем, что в головной части бункера установлена плата управления устройством, а заслонка соединена с мотором управления заслонкой толкателями, в центре имеет отверстие, через которое свободно пропущен вал управления рассеивателем, причем рассеиватель выполнен в виде крыльчатки.
2. Устройство по п. 1, отличающееся тем, что заслонка выполнена наклонной.
3. Устройство по п. 1, отличающееся тем, что крыльчатка имеет изогнутое основание.
4. Устройство по п. 3, отличающееся тем, что на изогнутом основании крыльчатки установлена изогнутая лопатка.
5. Устройство по п. 1, отличающееся тем, что в головной части бункера расположен тензодатчик, соединенный с платой управления.
6. Устройство по п. 1, отличающееся тем, что устройство закреплено на кронштейне, имеющем разъемы для подключения внешних устройств.
7. Устройство по п. 6, отличающееся тем, что разъемы выполнены для подключения датчиков, исполнительных устройств, сети интернет, питания камеры, внешнего питания.
8. Устройство по п. 1, отличающееся тем, что головная часть бункера соединена с основной частью бункера через виброизоляционную прокладку.
9. Устройство по п. 1, отличающееся тем, что в торцевой части заслонка имеет пазы для тонкого дозирования корма.
10. Устройство по п. 1, отличающееся тем, что вал мотора вращения рассеивателем на конце установлен в подшипник.
11. Устройство по п. 10, отличающееся тем, что подшипник закреплен на кронштейне, соединенном с корпусом раздаточного механизма.
12. Устройство по п. 10, отличающееся тем, что подшипник закреплен на пластине, соединенной с корпусом раздаточного механизма с помощью стоек.
13. Устройство по п. 5, отличающееся тем, что бункер свободно закреплен за головную часть через тензодатчик.
14. Устройство по п. 1, отличающееся тем, что плата управления содержит блок управления беспроводной связью.
15. Устройство по п. 1, отличающееся тем, что блок управления беспроводной связью выполнен содержащим GSM модуль и Bluetooth модуль.
16. Способ удаленного управления устройством по п. 1, характеризующийся прямой передачей данных на облачный сервер сети интернет, с помощью канала мобильных данных, модуля GSM или через проводную сеть Ethernet, с использованием шифрования, а также организацией распределенной сети между однотипными устройствами, с помощью модуля Bluetooth-mesh, причем подключение к дозатору, его настройку и управление настройками, контроль за состоянием аквакультуры осуществляют с любого мобильного устройства, с помощью связи Bluetooth, либо через удаленный доступ к облачному серверу.
17. Способ по п. 16, отличающийся тем, что управление кормушкой осуществляют программно от общего блока управления таким образом, что при наступлении заранее заданного момента подачи корма, заслонку поднимают вверх и корм самотеком ссыпается на вращающийся диск рассеивателя, включением мотора управления рассеивателя и регулируя его скорость разбрасывают корм на заданную площадь; причем с помощью тензометрии фиксируют изменение веса бункера с кормом и при достижении заданной дозы, заслонку закрывают, а мотор вращения рассеивателя останавливают.
18. Способ по п. 16, отличающийся тем, что ведут учет параметров воды с помощью датчиков: температуры, кислотности, уровня кислорода.
19. Способ по п. 16, отличающийся тем, что с помощью задвижки, формируют щель, через которую дозируют корм разного размера или через которую регулирует скорость выдачи корма заданного размера.
20. Способ по п. 16, отличающийся тем, что управление крыльчаткой осуществляют с помощью мотора с пониженным тепловыделением, контролем перегрузки и перегрева.
21. Способ по п. 16, отличающийся тем, что осуществляют световую сигнализацию с помощью светодиодов разных цветов.
22. Способ по п. 16, отличающийся тем, что используют одновременно датчик растворенного кислорода, датчик относительной влажности, абсолютного атмосферного давления и температуры воздуха, с помощью которых рассчитывают уровень насыщения растворенного кислорода в процентах.
| US 7222583 B2, 29.05.2007 | |||
| Система автоматического кормления рыбы | 1978 |
|
SU766552A1 |
| Устройство для раздачи кормов | 1980 |
|
SU873991A2 |

