Ссылка на связанные заявки
Даты приоритета данной заявки определяются датами подачи заявки ЕР 14150939.8, поданной 13.01.2014, ЕР 14173947.4, поданной 25.06.2014, ЕР 14183385,5, поданной 3.09.2014, ЕР 14183624.7, поданной 4.09.2014, и ЕР 14195719.1, поданной 1.12.2014. Содержание всех указанных заявок, поданных заявителем настоящего изобретения, полностью включено в данное описание посредством ссылки.
Уровень техники
1. Контекст
Самым крупным вкладом в точность измерения времени стало введение осциллятора в качестве регулятора хода, сначала в форме маятника, введенного Христианом Гюйгенсом в 1656 г., а затем баланса со спиральной пружиной, введенного Гюйгенсом и Гуком около 1675 г., и камертона, введенного Н. Ньоде (N. Niaudet) и Луи Бреге (L.С. Breguet) в 1866 г. (см. ссылки [20] и [5]). С тех пор во всех наручных часах и во всех других механических часах использовались только механические осцилляторы (балансы с электромагнитной восстанавливающей силой, аппроксимирующей спиральную пружину, включены в данном контексте в категорию схем балансирное колесо - спиральная пружина). В наручных часах и в других механических часах эти осцилляторы требуют использования спускового механизма, наличие которого создает многочисленные проблемы из-за присущей ему сложности и относительно низкой эффективности, которая в лучшем случае едва достигает 40%. Низкая эффективность спусковых механизмов является неизбежной, поскольку они основаны на прерывистом движении, т.е. все движение должно быть остановлено, а затем возобновлено, что приводит к затратному ускорению из состояния покоя и к шуму вследствие соударений. Хорошо известно, что спусковые механизмы представляют собой самую сложную и чувствительную часть наручных часов, и, в отличие от спускового механизма морского хронометра, для наручных часов так и не удалось разработать удовлетворительный спусковой механизм.
Швейцарский патент №113025, опубликованный 16.12.1925, описывает способ приведения в действие колебательного механизма. Решаемая задача, отмеченная в данном документе, состоит в замене дискретной регулировки непрерывной регулировкой, однако, не пояснено, как применить сформулированные принципы к прибору для измерения времени, такому как часы. В частности, представленные конструкции не рассматривались как изотропные гармонические осцилляторы, а описанные архитектуры не обеспечивают планарного движения колеблющейся (осциллирующей) массы, как это предлагается изобретением.
Швейцарская патентная заявка №9110/67, опубликованная 27.06.1967, описывает вращающийся резонатор к прибору для измерения времени. Описанный резонатор содержит две массы, установленные консольно на центральной опоре, причем каждая масса осциллирует по окружности вокруг оси симметрии. Каждая масса связана с центральной опорой посредством четырех пружин. Пружины, ассоциированные с каждой массой, соединены одна с другой, чтобы обеспечить для массы динамическую связь. Чтобы поддерживать осциллирующее вращение масс, используется электромагнитное устройство, воздействующее на дужки каждой массы, снабженные постоянным магнитом. Одна из пружин снабжена собачкой для взаимодействия с храповым колесом, чтобы преобразовывать осциллирующее движение масс в однонаправленное вращательное движение. Следовательно, описанная система все еще основана на преобразовании осцилляции, являющейся прерывистым движением, во вращение посредством собачки. Это делает спусковую систему, описанную в данном документе, эквивалентной спусковому механизму вышеупомянутой системы, известной из уровня техники.
Дополнительный швейцарский патент №512757, опубликованный 14.05.1971, относится к механическому вращающемуся резонатору прибора для измерения времени. В данном патенте, в основном, описываются пружины, используемые в этом резонаторе так, как это описано в швейцарской патентной заявке №9110/67, рассмотренной выше. В этом случае резонатор также использует массу, осциллирующую вокруг оси.
В патенте США №3318087, опубликованном 9.05.1967, раскрыт торсионный осциллятор, который осциллирует вокруг вертикальной оси. Это решение также аналогично рассмотренному выше спусковому механизму, известному из уровня техники.
Раскрытие изобретения
Задача, решенная изобретением, состоит в том, чтобы усовершенствовать известные системы и способы.
Еще одна задача состоит в создании системы, которая устраняет необходимость в прерывистом движении спусковых механизмов, известных из уровня техники.
Следующая задача заключается в том, чтобы предложить механический изотропный гармонический осциллятор.
Другая задача, решенная изобретением, состоит в создании осциллятора, пригодного для использования в различных приложениях, связанных с измерением времени, например в качестве: регулятора хода для хронографа или иного прибора для измерения времени (такого как наручные часы), акселерометра или регулятора скорости.
Изобретение решает также проблему спускового механизма путем полного его устранения или, альтернативно, путем создания семейства новых упрощенных спусковых механизмов, свободных от недостатков известных спусковых механизмов наручных часов.
Таким образом, изобретение предлагает упрощенный механизм, обладающий повышенной эффективностью.
В одном варианте изобретение относится к механическому изотропному гармоническому осциллятору, содержащему массу, имеющую две степени свободы и способную совершать орбитальное движение относительно неподвижного основания под воздействием пружин, обладающих изотропностью и обеспечивающих линейную восстанавливающую силу вследствие изотропии, присущей веществу.
Еще в одном варианте изотропный гармонический осциллятор может содержать группу изотропных линейных пружин, установленных так, чтобы придать совершающей орбитальное движение (орбитальной) массе две степени свободы относительно неподвижного основания.
В одном варианте изобретения изотропный гармонический осциллятор может содержать сферическую массу с группой экваториальных пружин.
В другом варианте изотропный гармонический осциллятор может содержать сферическую массу с полярной пружиной.
В следующем варианте механизм может содержать два изотропных гармонических осциллятора, связанных посредством оси с целью сбалансировать линейные ускорения.
В другом варианте механизм может содержать два изотропных гармонических осциллятора, связанных посредством оси с целью сбалансировать угловые ускорения.
Согласно одному варианту механизм может содержать компонент с изменяемым радиусом, который вращается в шарнире относительно неподвижной рамки, и призматическое сочленение, которое обеспечивает для конца указанного компонента возможность вращения с изменяемым радиусом.
В одном варианте механизм может содержать неподвижную рамку, несущую ось кулисы, к которой прикладывается поддерживающий крутящий момент М, и кулису, прикрепленную к указанной оси и снабженную призматической прорезью. При этом к массе осциллятора или осцилляторной системы прикреплен жесткий палец, введенный в указанную прорезь.
В другом варианте механизм может содержать свободный спуск для прерывистой подачи на осциллятор механической энергии.
В следующем варианте свободный спуск содержит два параллельных зубца, прикрепленных к орбитальной массе. При этом один зубец смещает упор, способный шарнирно поворачиваться на пружине с освобождением спускного колеса, которое сообщает импульс другому зубцу, восстанавливая энергию, потерянную осциллятором или осцилляторной системой.
Изобретение относится также к прибору для измерения времени, такому как часы, содержащему в качестве регулятора хода описанный осциллятор или описанную осцилляторную систему.
Согласно одному варианту прибор для измерения времени представляет собой наручные часы.
Предлагается применить осциллятор или осцилляторную систему согласно изобретению в качестве регулятора хода в хронографе для измерения долей секунды, требующего дополнительно только мультипликативную систему зубчатых колес с расширенным диапазоном скоростей, например, для достижения частоты 100 Гц с целью обеспечения возможности измерения интервалов порядка 1/100 секунды.
Предлагается также применить осциллятор или осцилляторную систему согласно изобретению в качестве регулятора скорости для часов с боем или музыкальных и наручных часов, а также музыкальных шкатулок с целью устранения нежелательного шума и снижения энергопотребления, а также с целью повышения стабильности музыкального ритма или боя.
Эти и другие варианты изобретения далее будут описаны более подробно.
Краткое описание чертежей
Изобретение станет более понятным из нижеследующего описания и прилагаемых чертежей.
Фиг. 1 иллюстрирует орбиту в случае притяжения, обратно пропорционального квадрату расстояния.
Фиг. 2 иллюстрирует орбиту в соответствии с законом Гука.
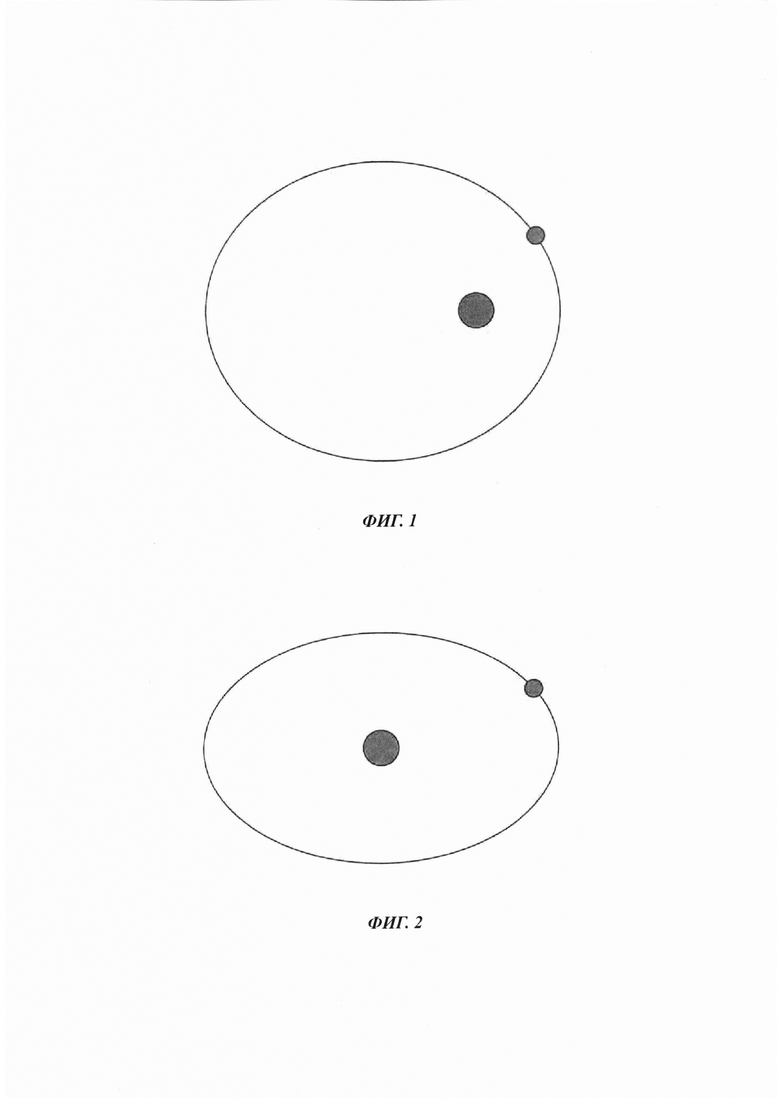
Фиг. 3 иллюстрирует пример физической реализации закона Гука.
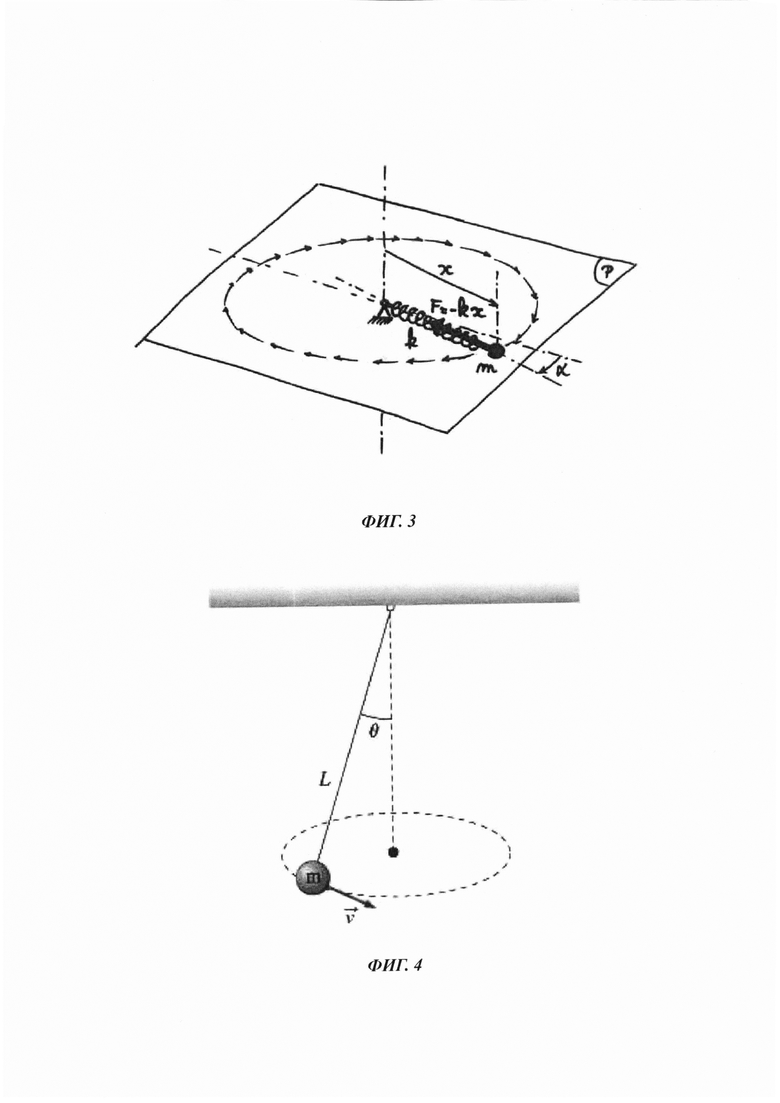
Фиг. 4 иллюстрирует принцип конического маятника.
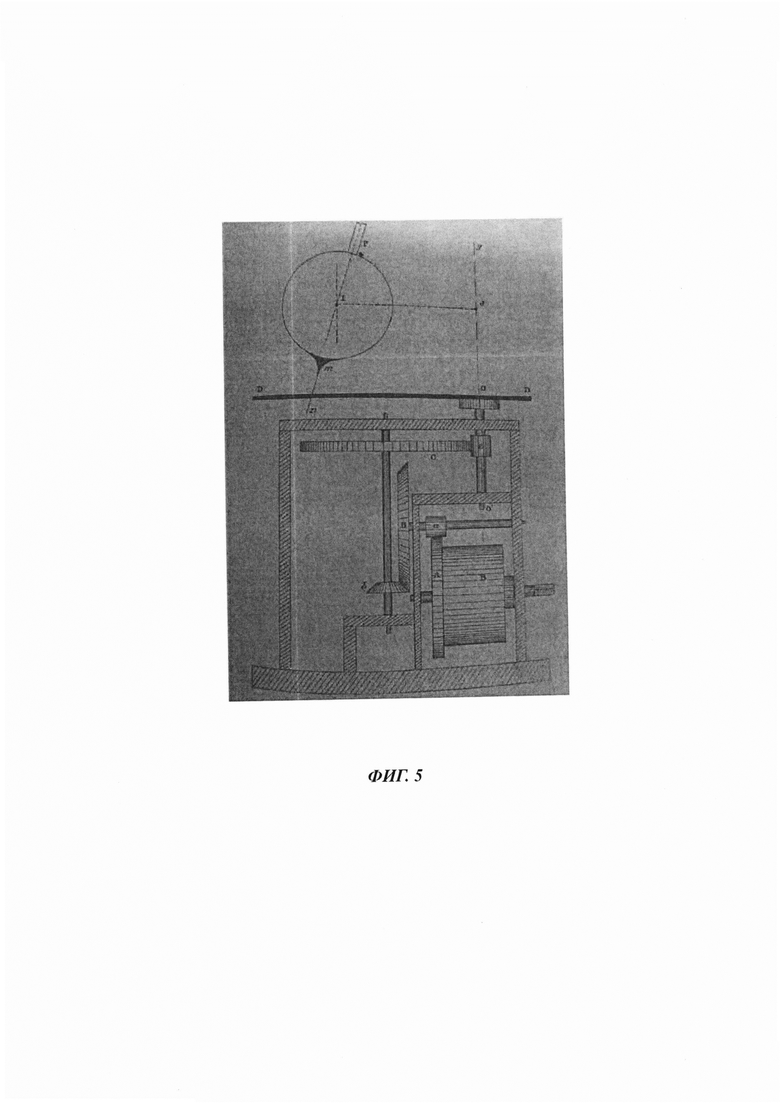
Фиг. 5 иллюстрирует механизм на основе конического маятника.
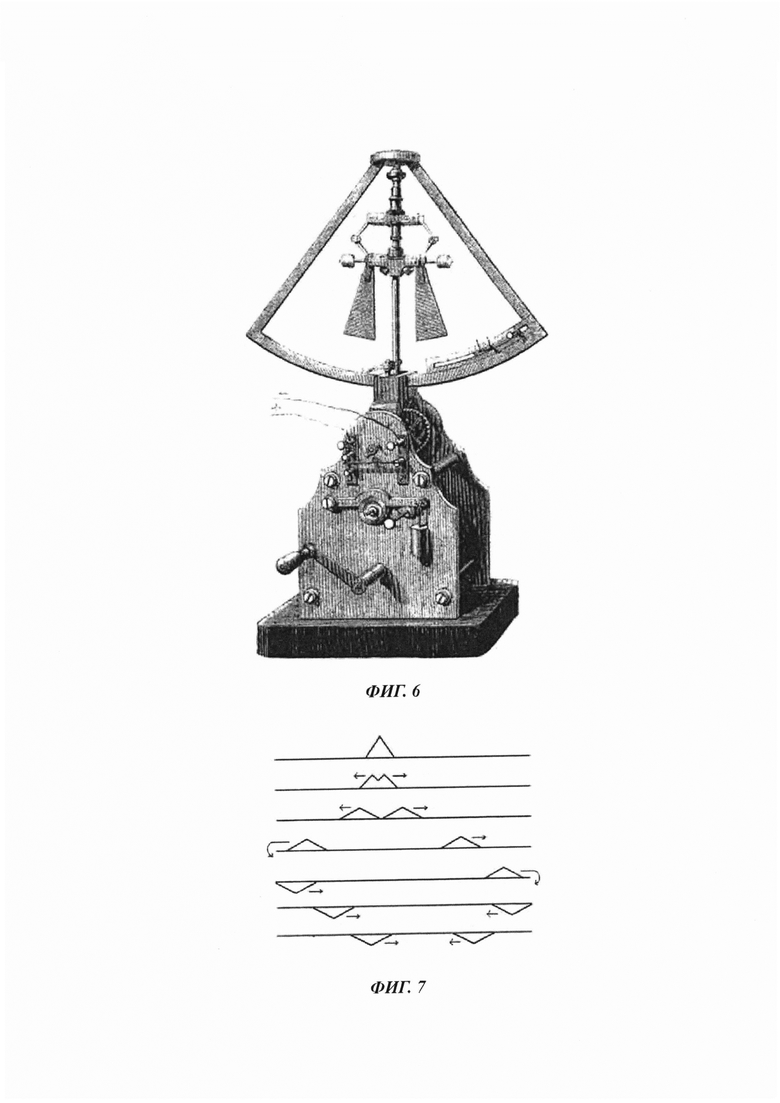
Фиг. 6 иллюстрирует регулятор Вилларсо, изготовленный Антуаном Бреге.
Фиг. 7 иллюстрирует распространение сингулярности по тронутой струне.
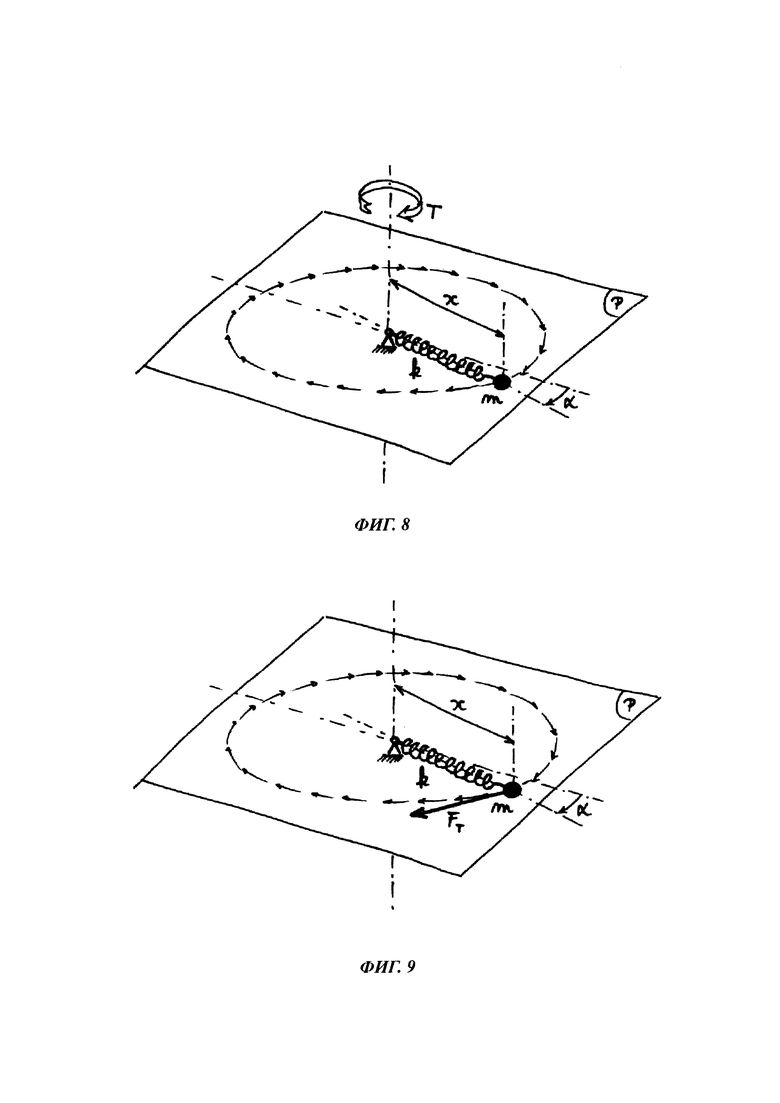
На фиг. 8 иллюстрируется принцип непрерывного приложения крутящего момента для поддержания энергии осциллятора.
Фиг. 9 иллюстрирует прерывистое приложение силы, чтобы поддерживать энергию осциллятора.
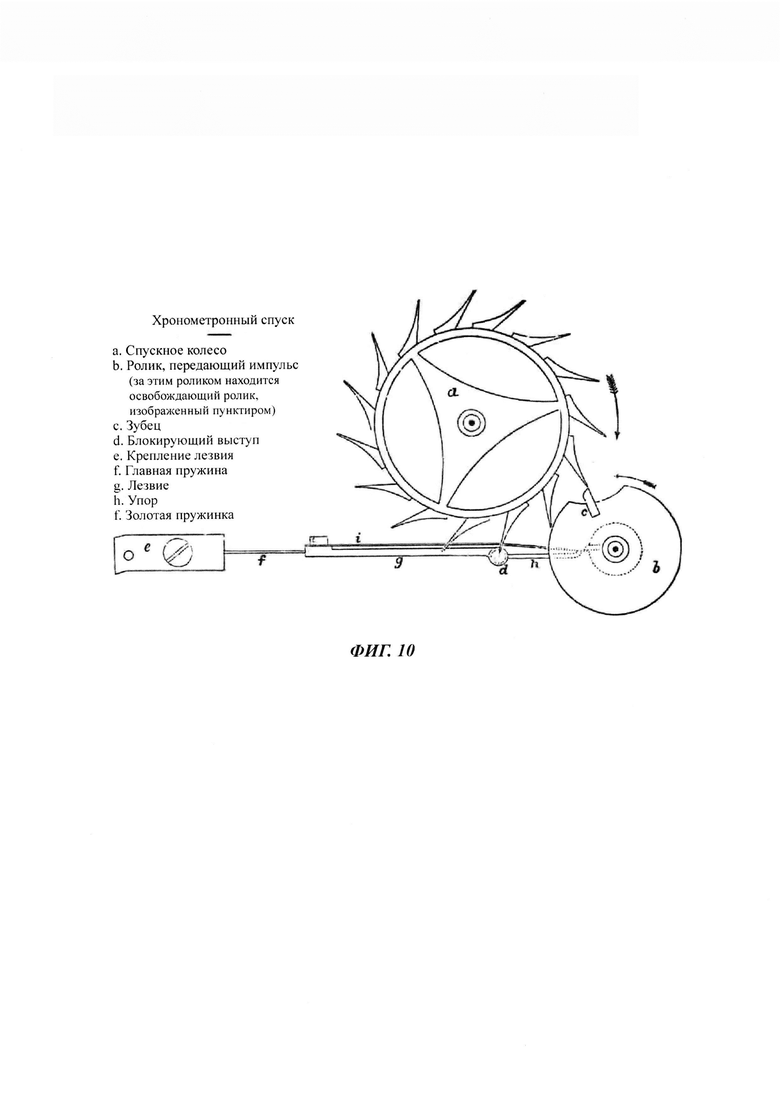
Фиг. 10 иллюстрирует классический свободный спуск.
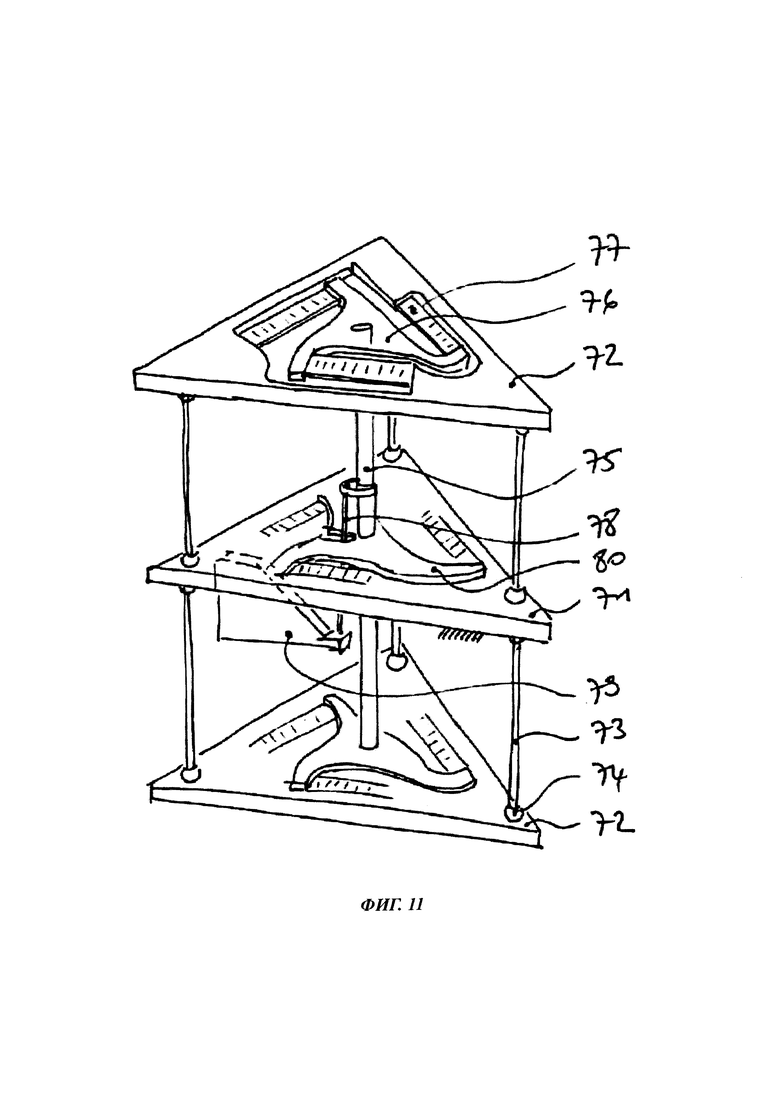
Фиг. 11 иллюстрирует вторую альтернативную реализацию компенсации тяжести во всех направлениях для изотропной пружины с двумя степенями свободы (С2СС). Это решение обеспечивает балансировку механизма по фиг. 22.
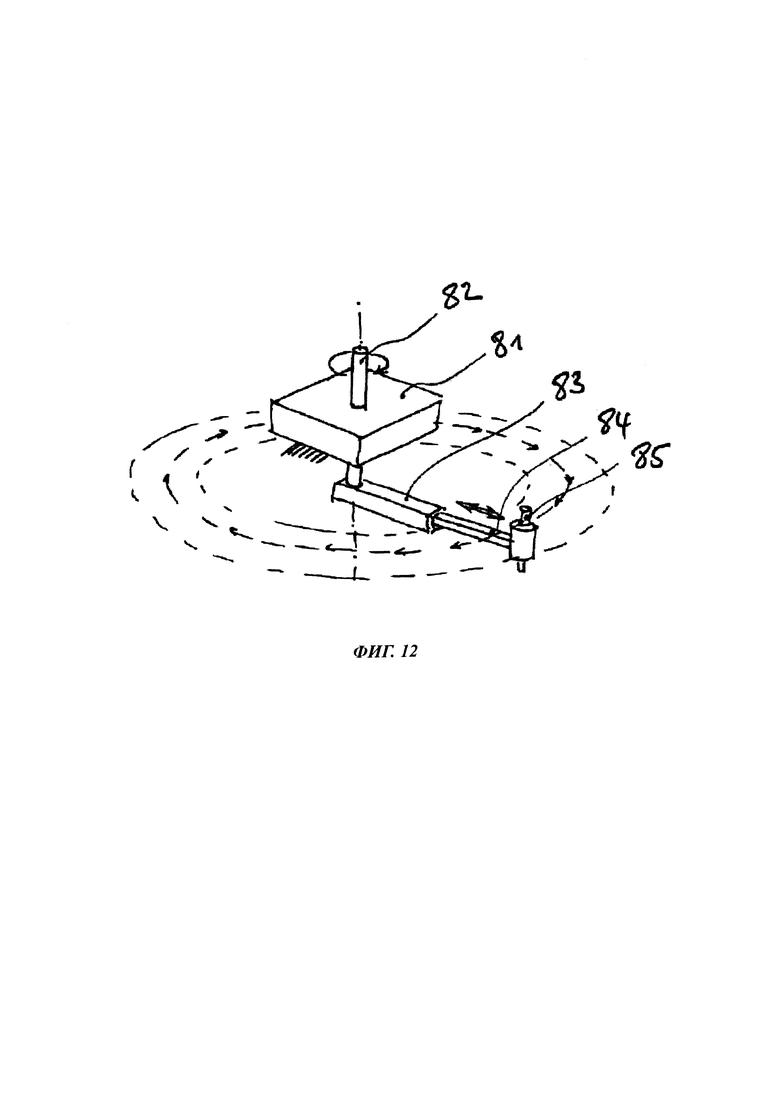
Фиг. 12 иллюстрирует компонент с переменным радиусом для поддержания энергии осциллятора.
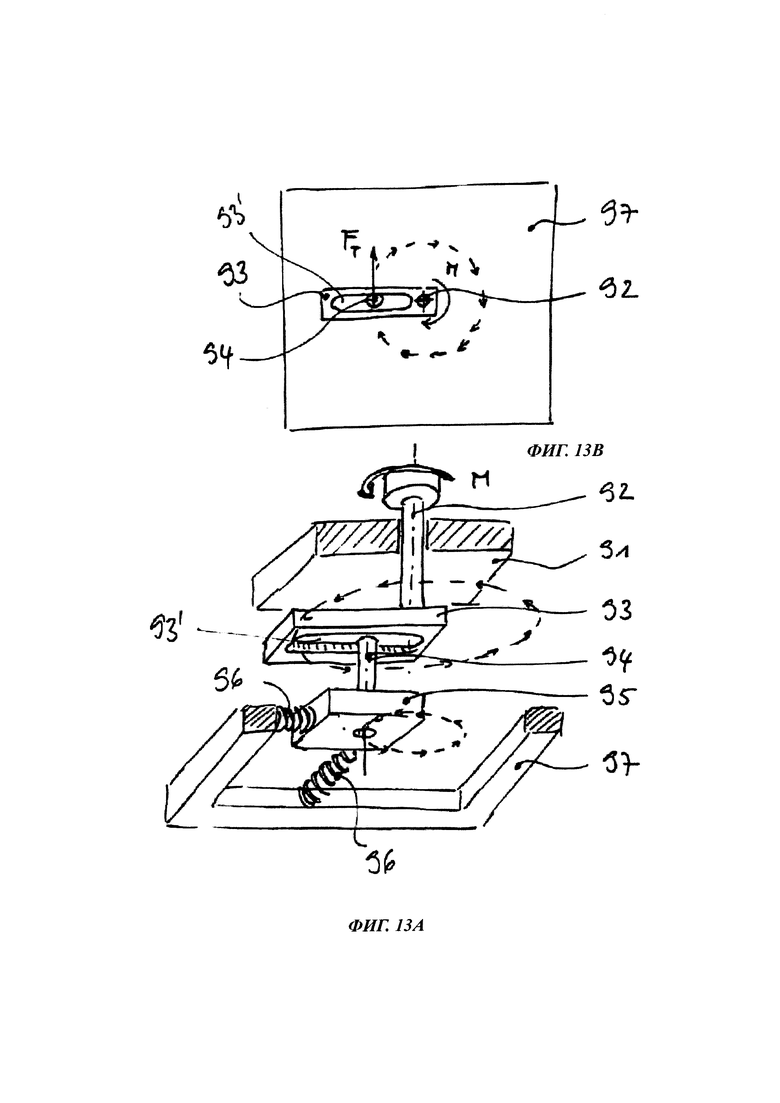
Фиг. 13А и 13В иллюстрируют реализацию прикрепленной к осциллятору кулисы с переменным радиусом для поддержания энергии осциллятора.
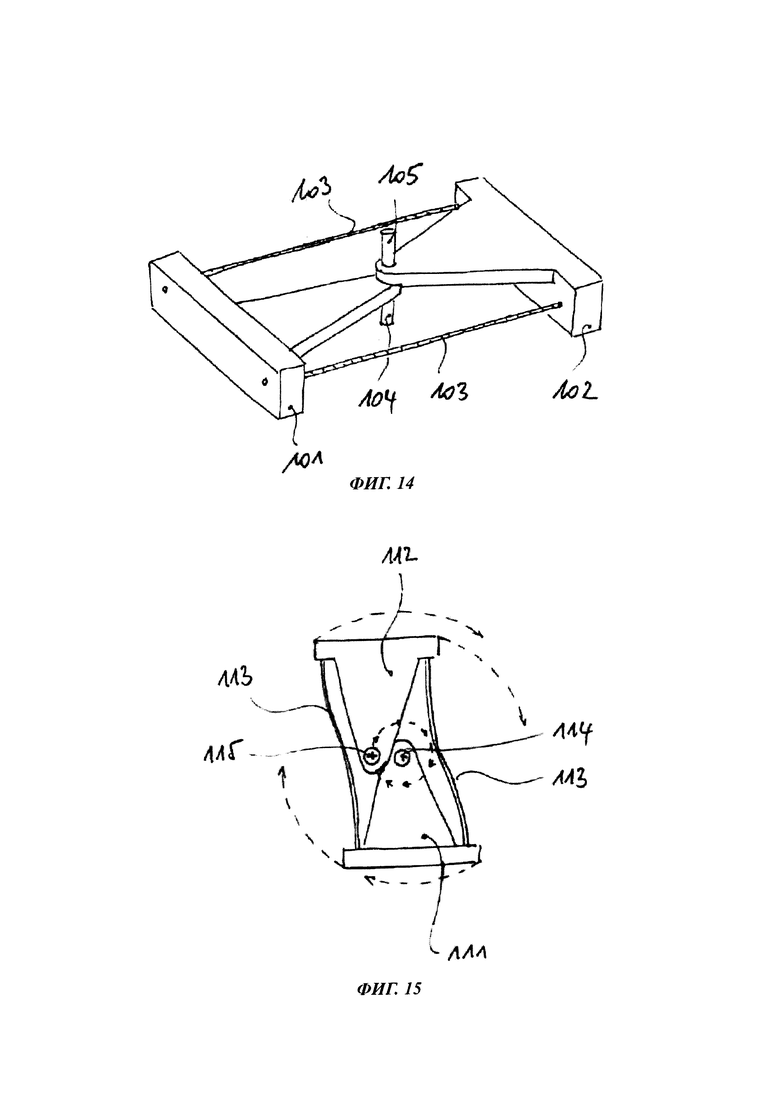
Фиг. 14 иллюстрирует реализацию компонента с переменным радиусом и с гибкими элементами для поддержания энергии осциллятора.
Фиг. 15 иллюстрирует другую реализацию компонента с переменным радиусом и с гибкими элементами для поддержания энергии осциллятора.
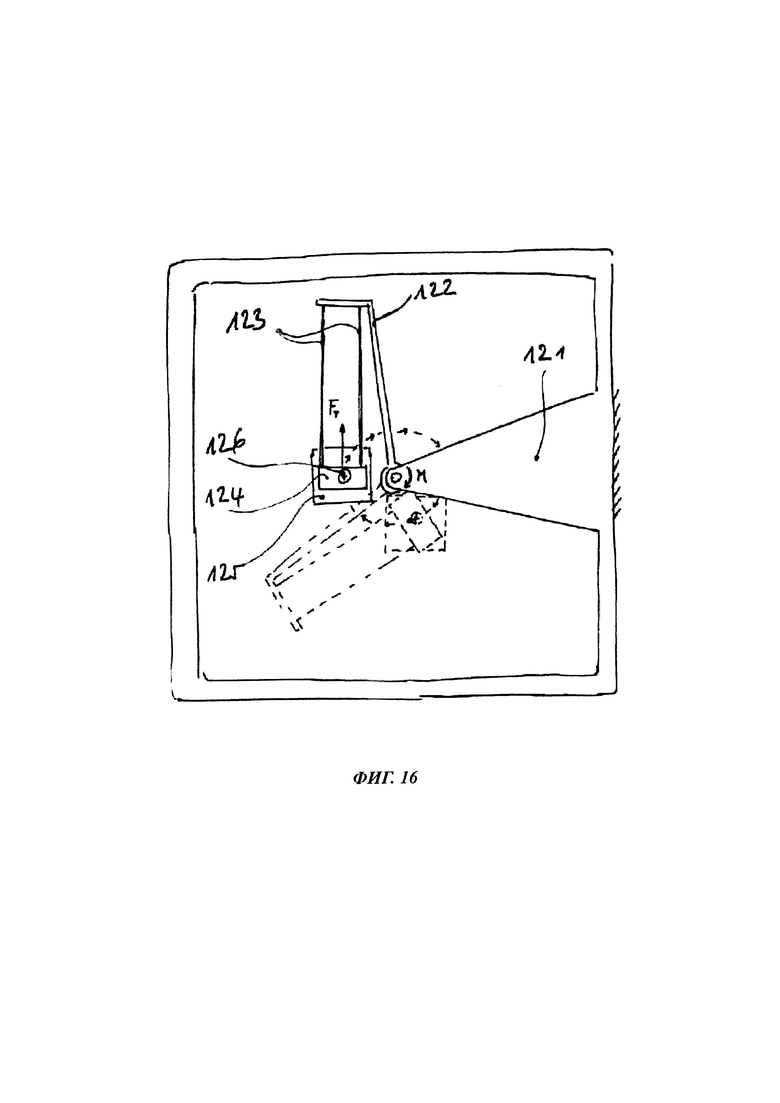
Фиг. 16 иллюстрирует альтернативную реализацию компонента с переменным радиусом и с гибкими элементами для поддержания энергии осциллятора.
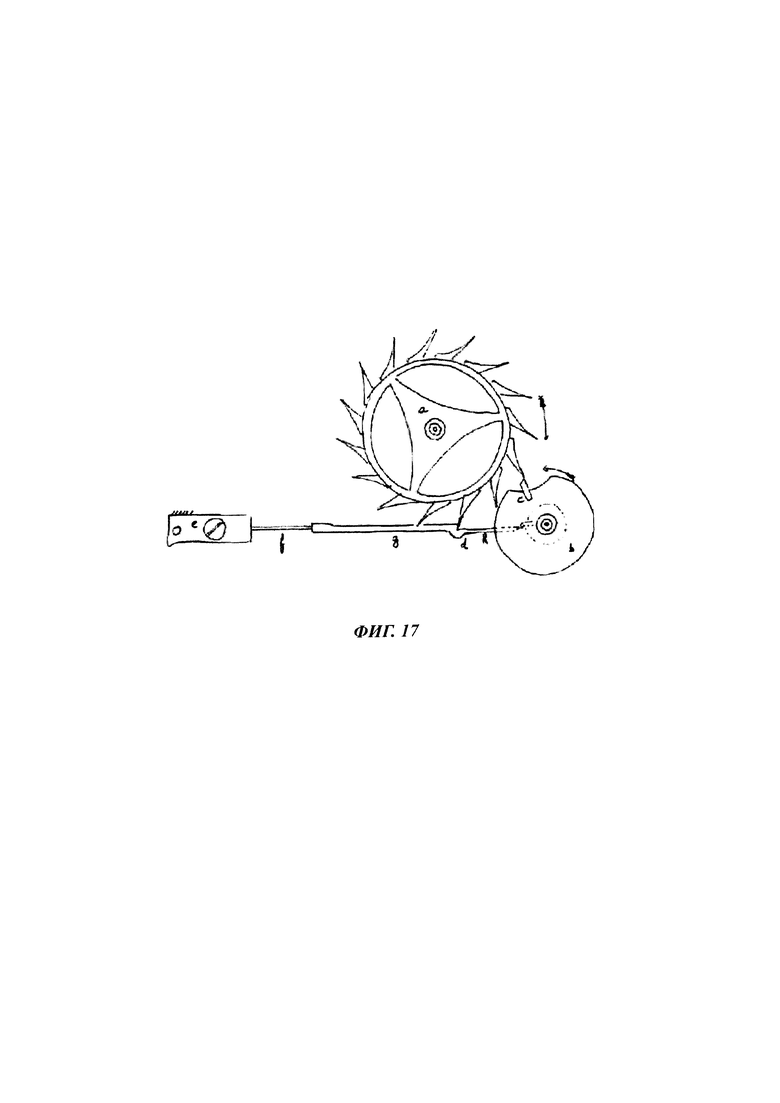
Фиг. 17 иллюстрирует упрощенный классический свободный спуск для изотропного гармонического осциллятора в.наручных часах.
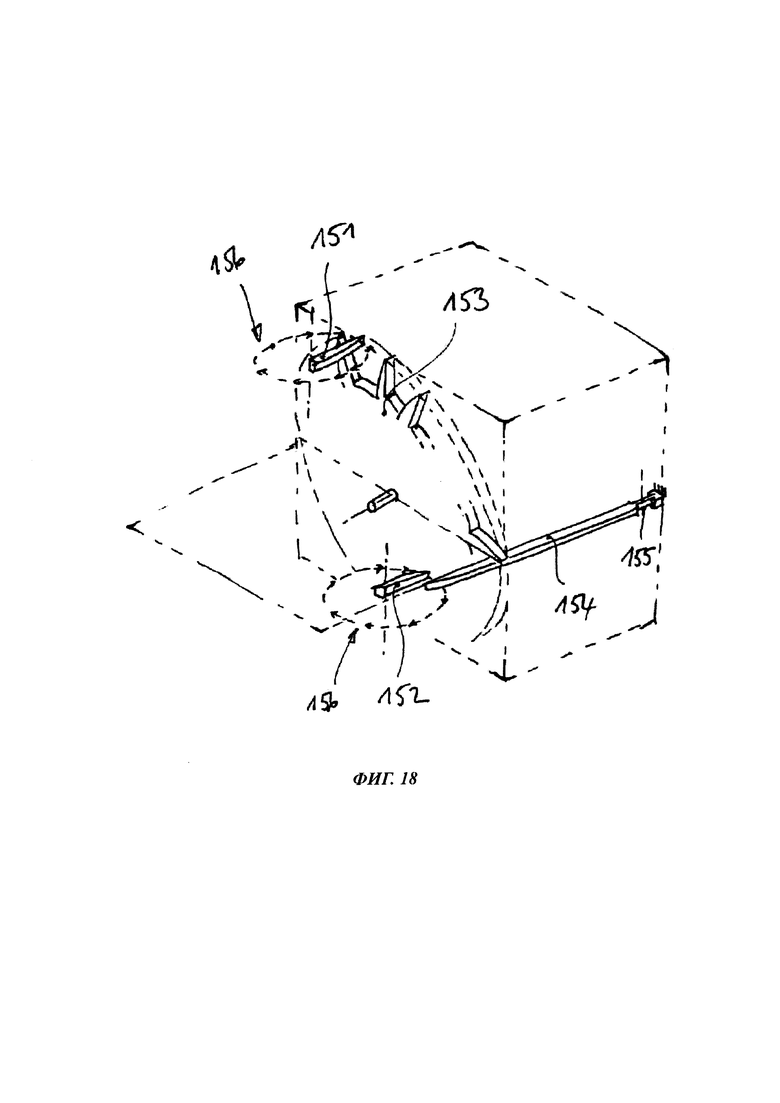
Фиг. 18 иллюстрирует вариант свободного спуска для поступательной орбитальной массы.
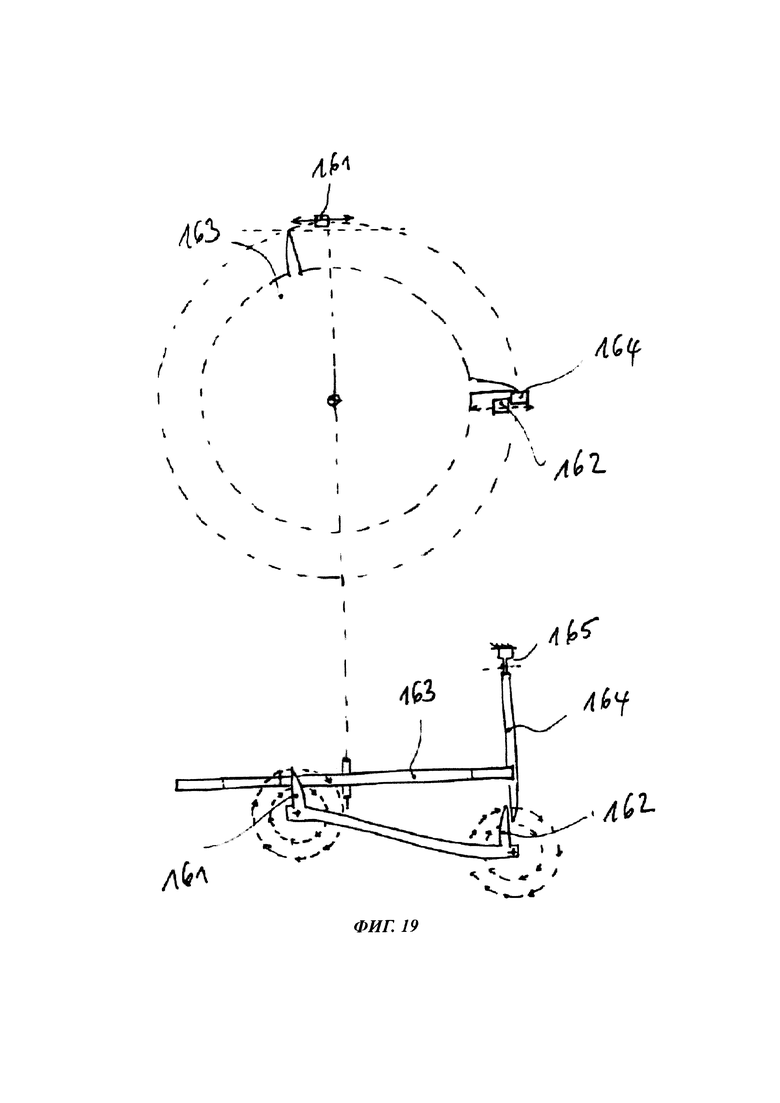
Фиг. 19 иллюстрирует другой вариант свободного спуска для поступательной орбитальной массы.
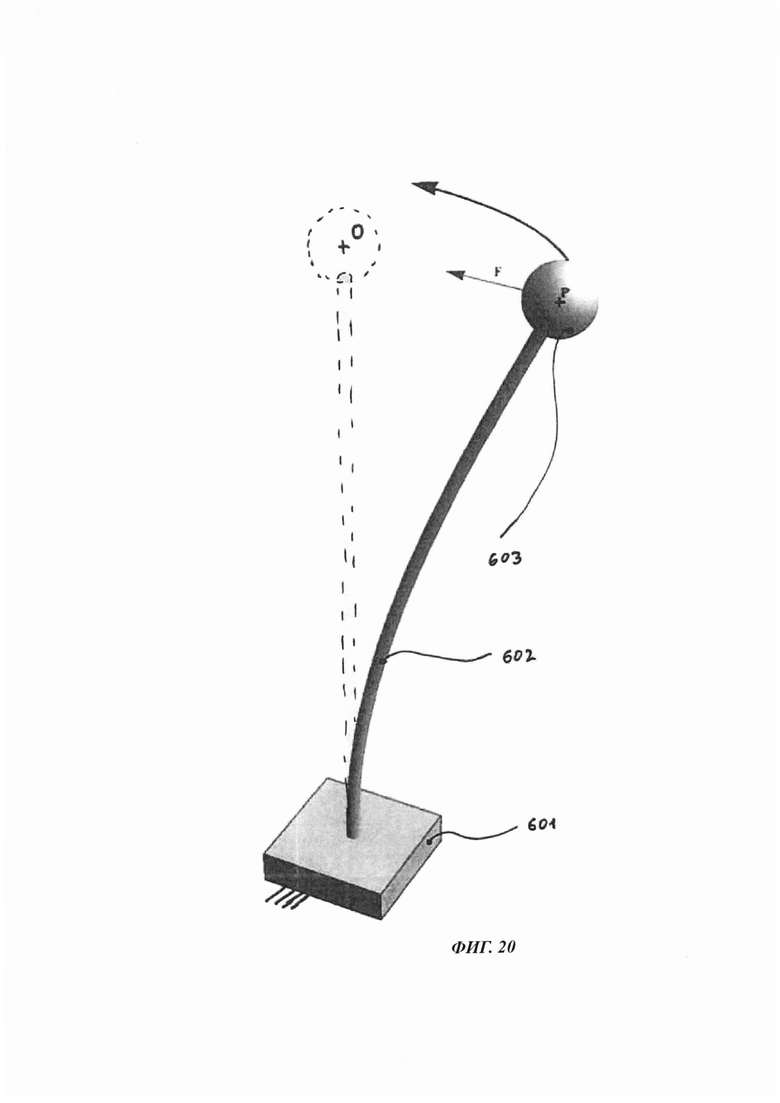
Фиг. 20 иллюстрирует изотропную пружину С2СС, основанную на изотропии вещества.
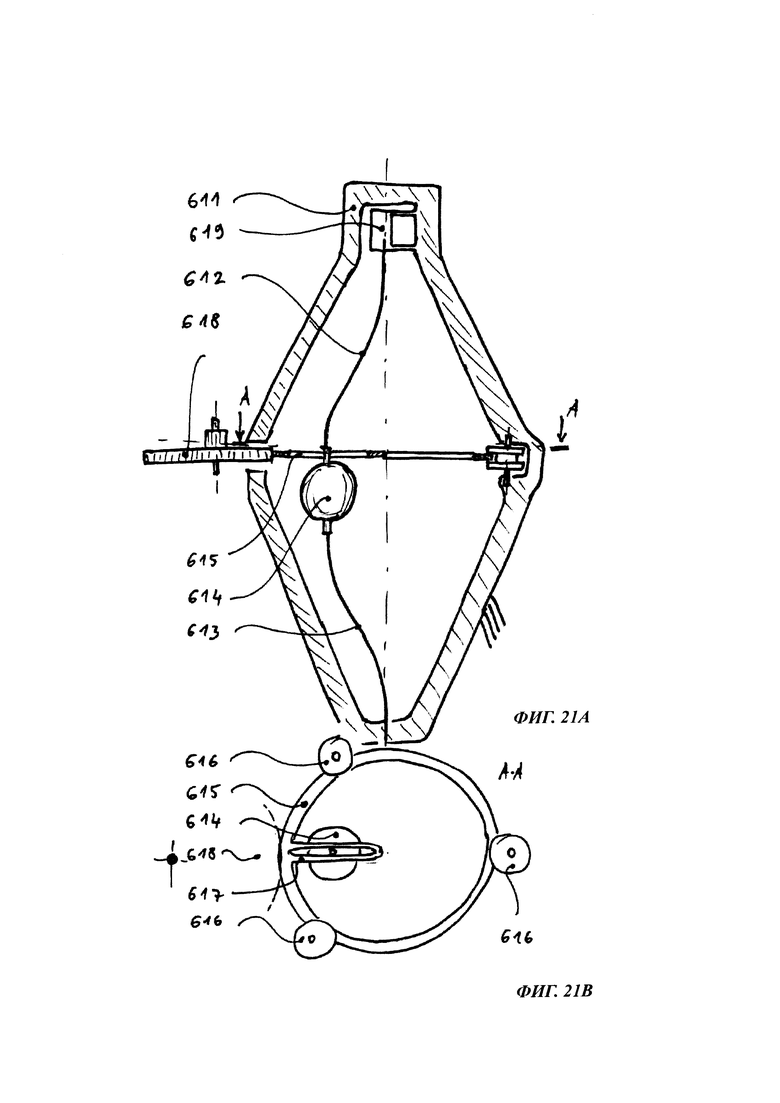
На фиг. 21А и 21В представлена, соответственно в осевом сечении и в поперечном сечении (на виде АА), изотропная пружина С2СС, которая основана на изотропии вещества и масса которой имеет пленарные орбиты.
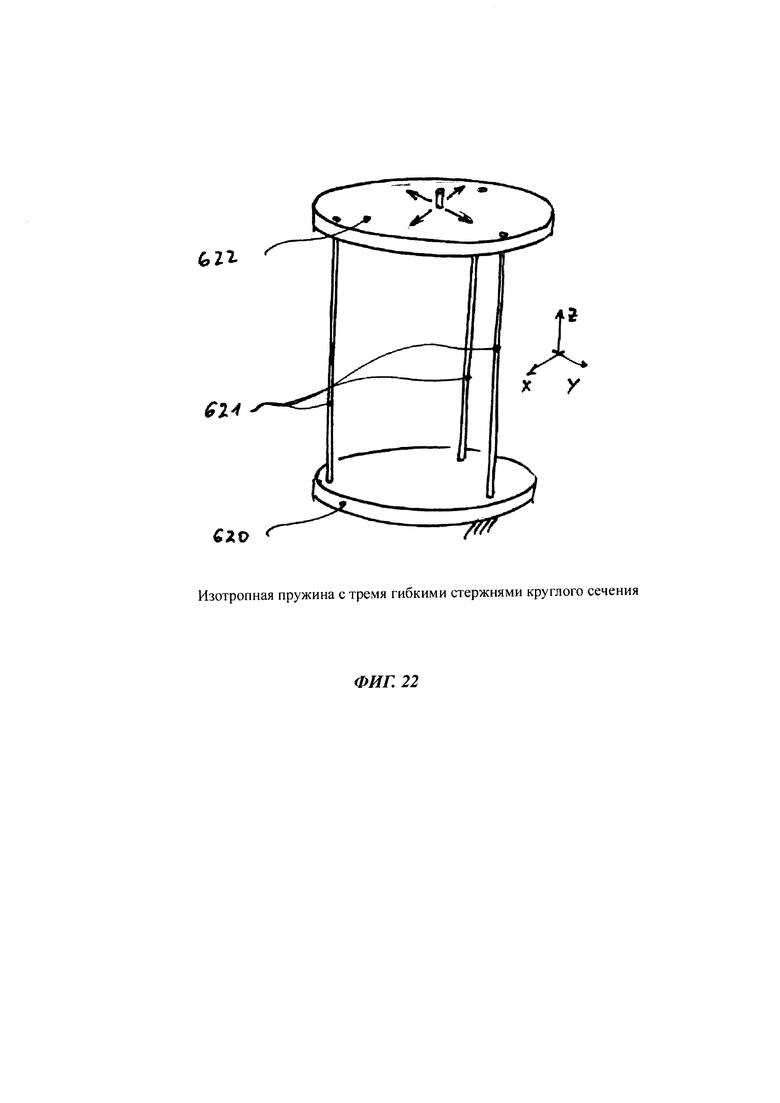
Фиг. 22 иллюстрирует изотропную пружину С2СС, использующую три изотропных цилиндрических стержня, повышающих планарность движения массы.
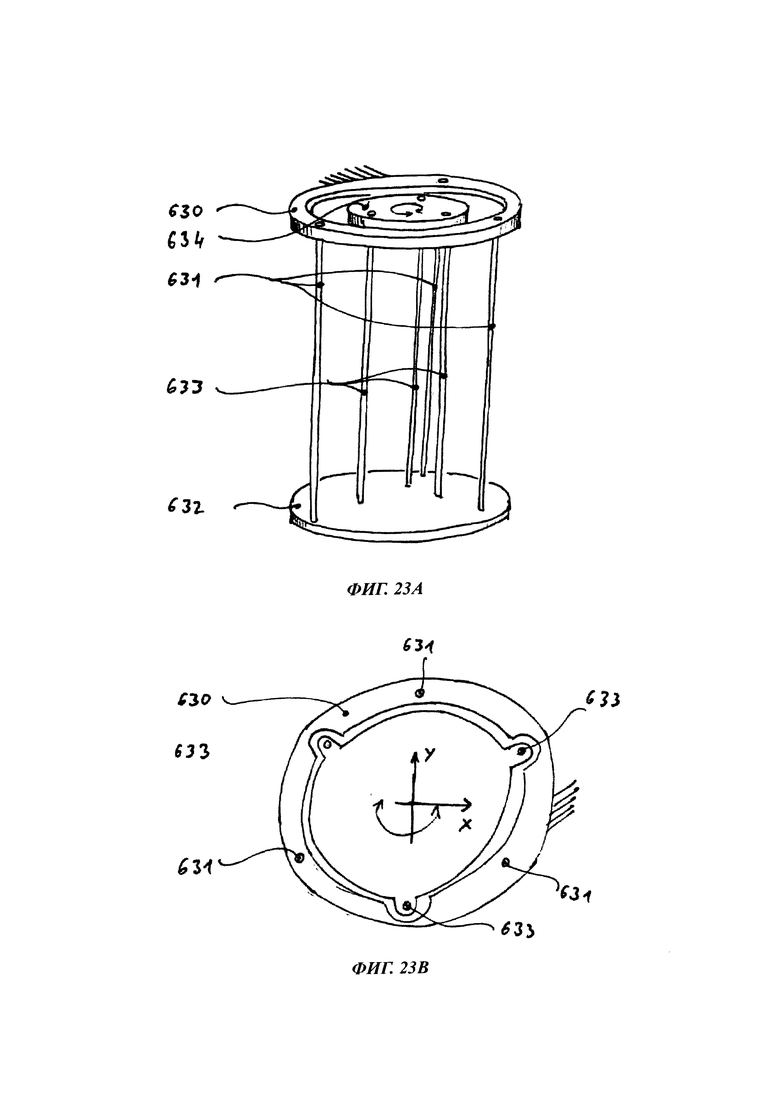
На фиг. 23А и 23В представлена, соответственно в перспективном изображении и на виде сверху, изотропная пружина С2СС, у которой непланарность механизма по фиг. 22 устранена посредством дублирования.
На фиг. 24А и 24В представлена, соответственно в осевом сечении и в поперечном сечении (аналогичном виду на фиг. 21А), изотропная пружина С2СС, скомпенсированная так, чтобы сбалансировать линейные и угловые ускорения.
Фиг. 25А иллюстрирует изотропную пружину С2СС с упругой мембраной и со сбалансированной "гантельной" конструкцией, обеспечивающей компенсацию силы тяжести; на фиг. 25В представлен, в сечении, центральный участок механизма по фиг. 25А.
Фиг. 26 иллюстрирует изотропную пружину С2СС с составными пружинами и со сбалансированной массой в форме гантели, скомпенсированной в отношении силы тяжести.
Фиг. 27 иллюстрирует, в продольном сечении, изотропную пружину С2СС, использующую составную пружину по фиг. 28А для получения массы с изотропными степенями свободы.
Фиг. 28А и 28В иллюстрируют, соответственно на виде сверху и в разрезе плоскостью А-А, пружину с четырьмя степенями свободы, использованную в механизме по фиг. 27.
Фиг. 29 иллюстрирует изотропную пружину С2СС с пружиной, содержащей три наклонных стержня и сбалансированную массу в форме гантели, скомпенсированную в отношении силы тяжести.
Фиг. 30 иллюстрирует изотропную пружину С2СС со сферической массой и с гибкими экваториальными пружинами на основе гибких элементов.
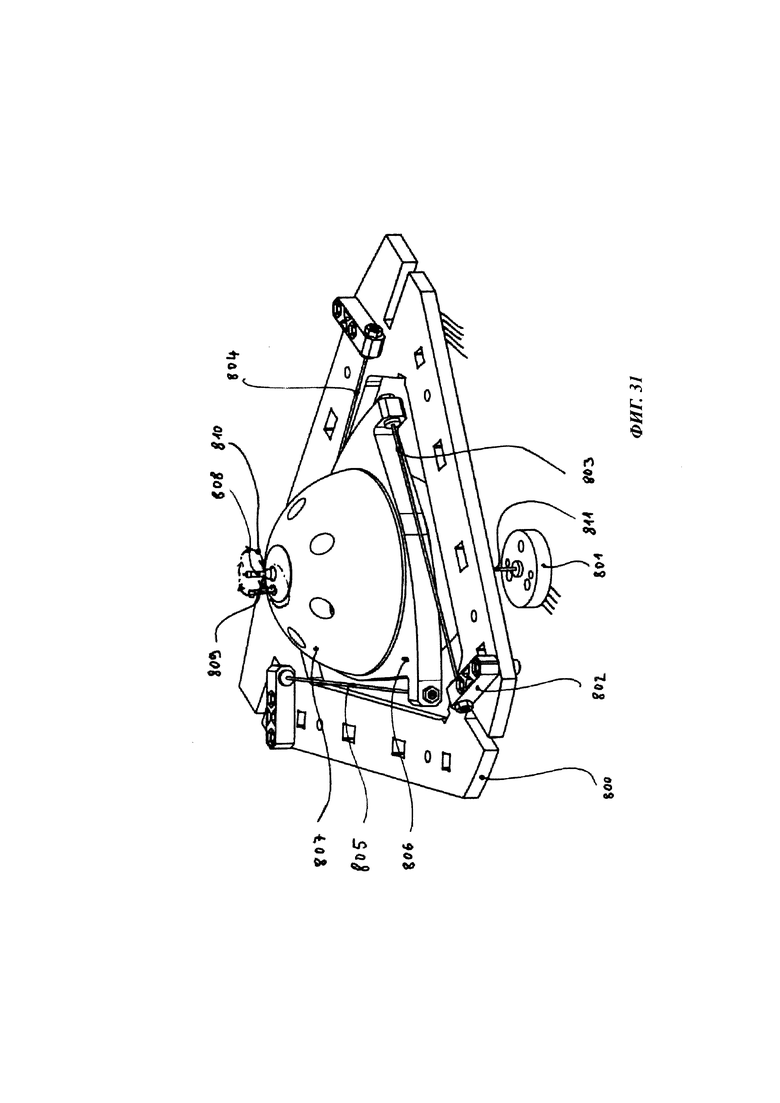
Фиг. 31 иллюстрирует изотропную пружину С2СС со сферической массой и с экваториальными пружинами на основе гибких стержней.
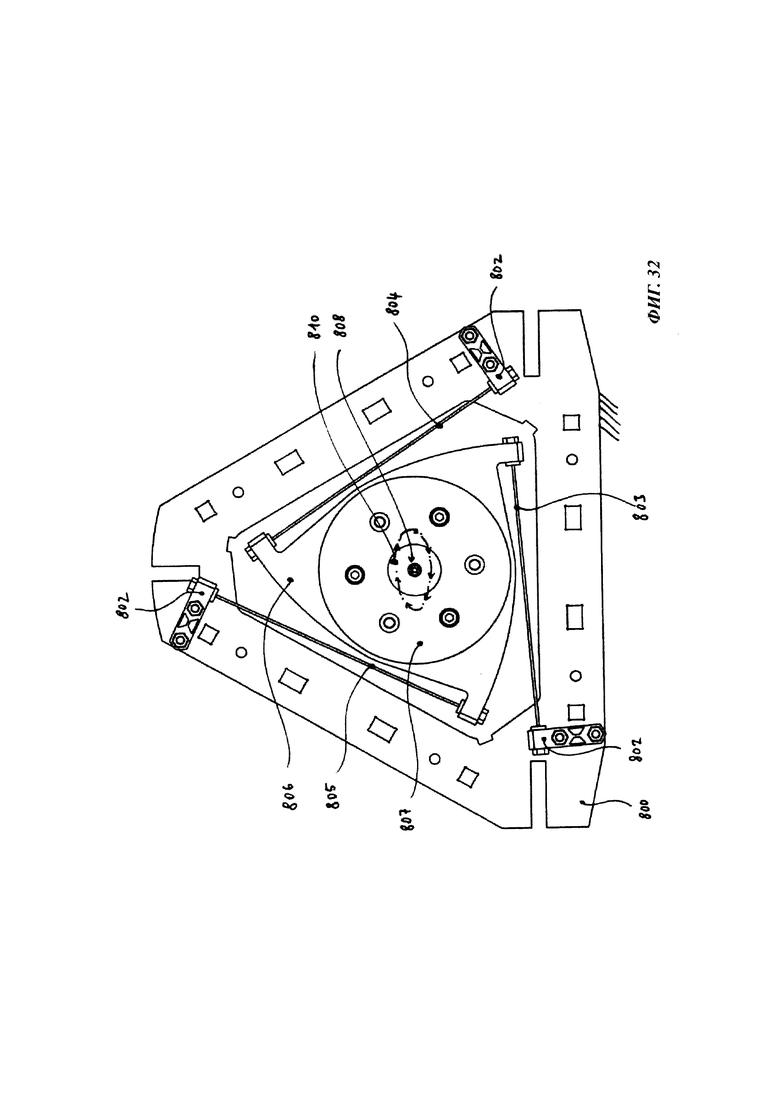
Фиг. 32 иллюстрирует изотропную пружину С2СС со сферической массой по фиг. 31 на виде сверху.
Фиг. 33 иллюстрирует изотропную пружину С2СС со сферической массой по фиг. 31 в разрезе вертикальной плоскостью.
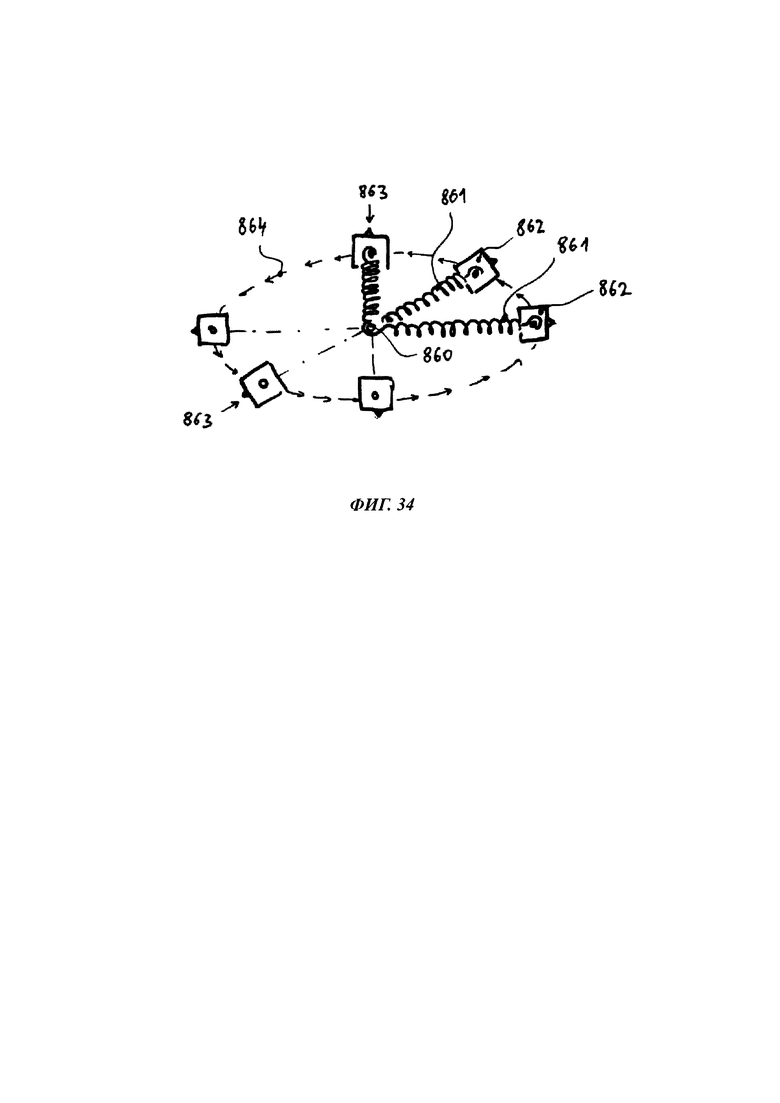
Фиг. 34 иллюстрирует вращающуюся пружину.
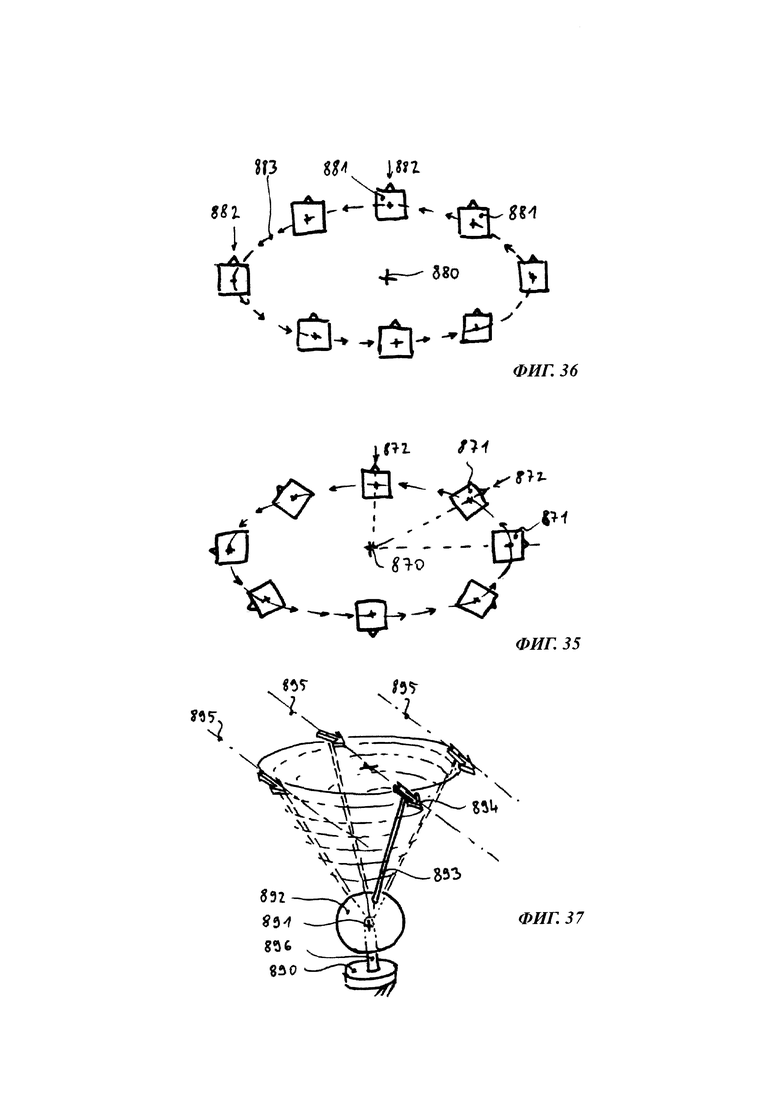
Фиг. 35 иллюстрирует тело, движущееся по эллиптической орбите с вращением.
Фиг. 36 иллюстрирует тело, движущееся по эллиптической орбите поступательно, без вращения.
Фиг. 37 иллюстрирует находящуюся на конце жесткого стержня точку, движущуюся по эллиптической орбите поступательно, без вращения.
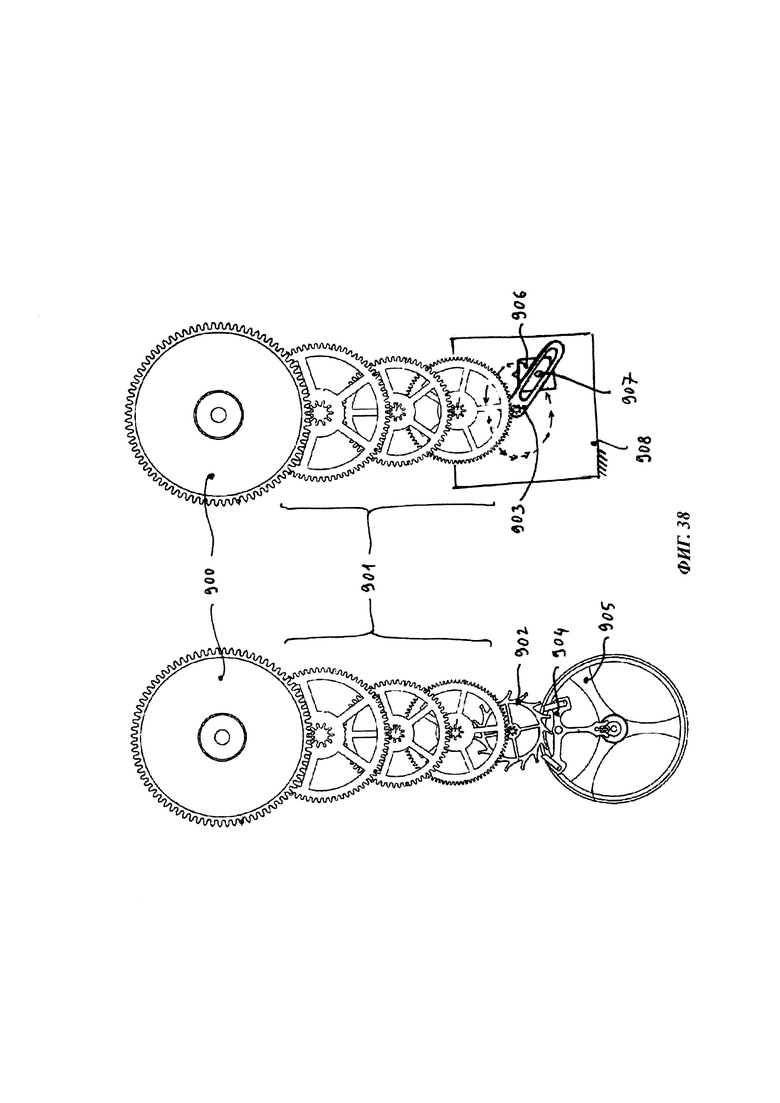
Фиг. 38 иллюстрирует интегрирование осциллятора по изобретению в стандартные механические наручные или иные часы путем замены известной пружины с балансирным колесом и спускового механизма изотропным осциллятором и приводной кулисой.
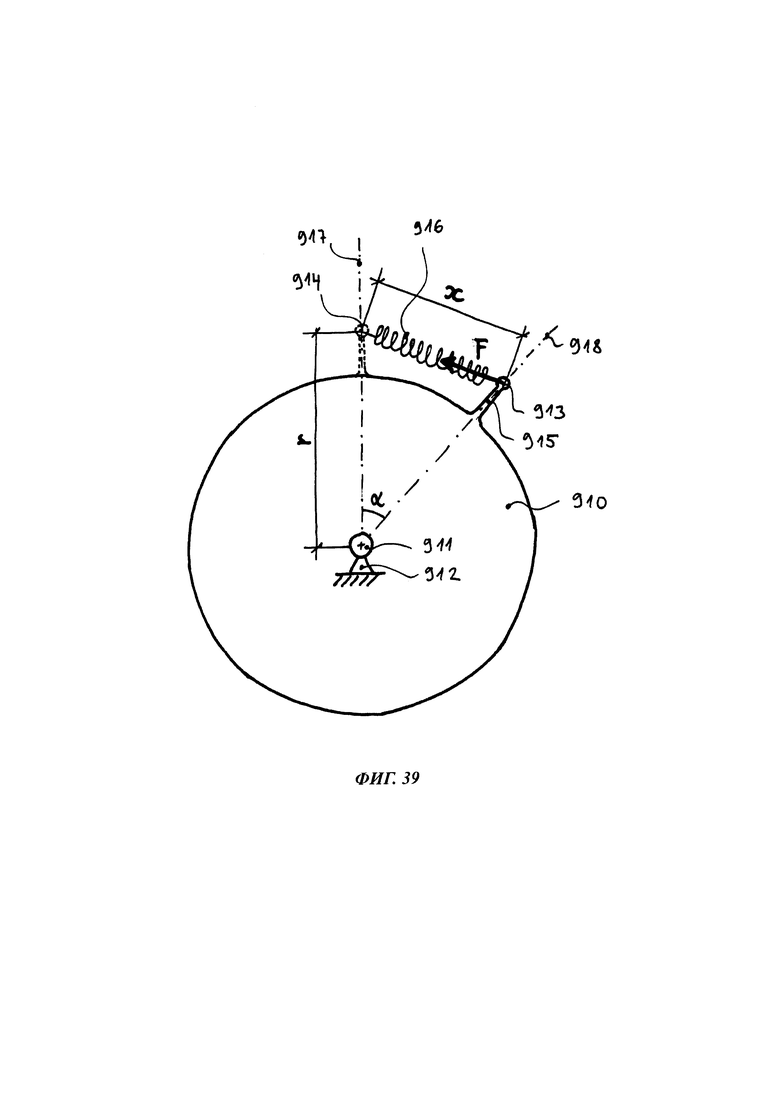
Фиг. 39 иллюстрирует концептуальную основу осциллятора со сферической массой и с полярной пружиной, обеспечивающей идеальный изохронизм для орбиты с постоянной угловой скоростью, имеющей постоянную широту.
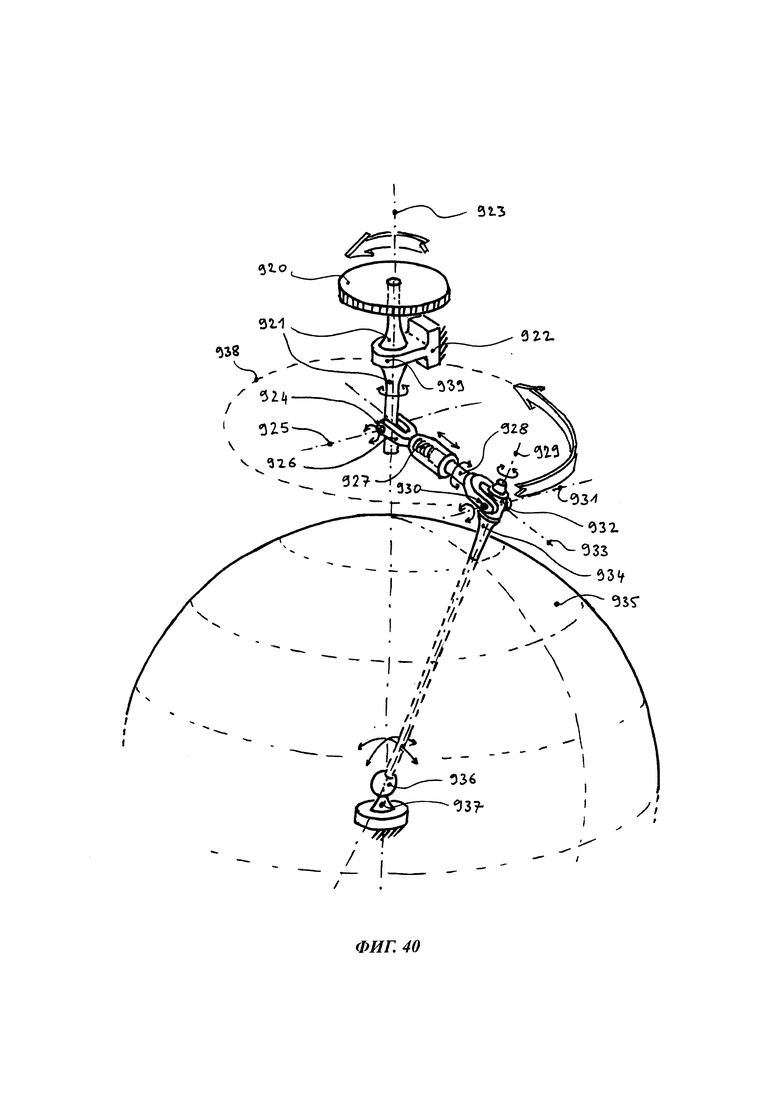
Фиг. 40 иллюстрирует концептуальную модель механизма, реализующего сферический осциллятор с полярной пружиной по фиг. 39 и использующего вращающийся компонент для поддержания энергии осциллятора.
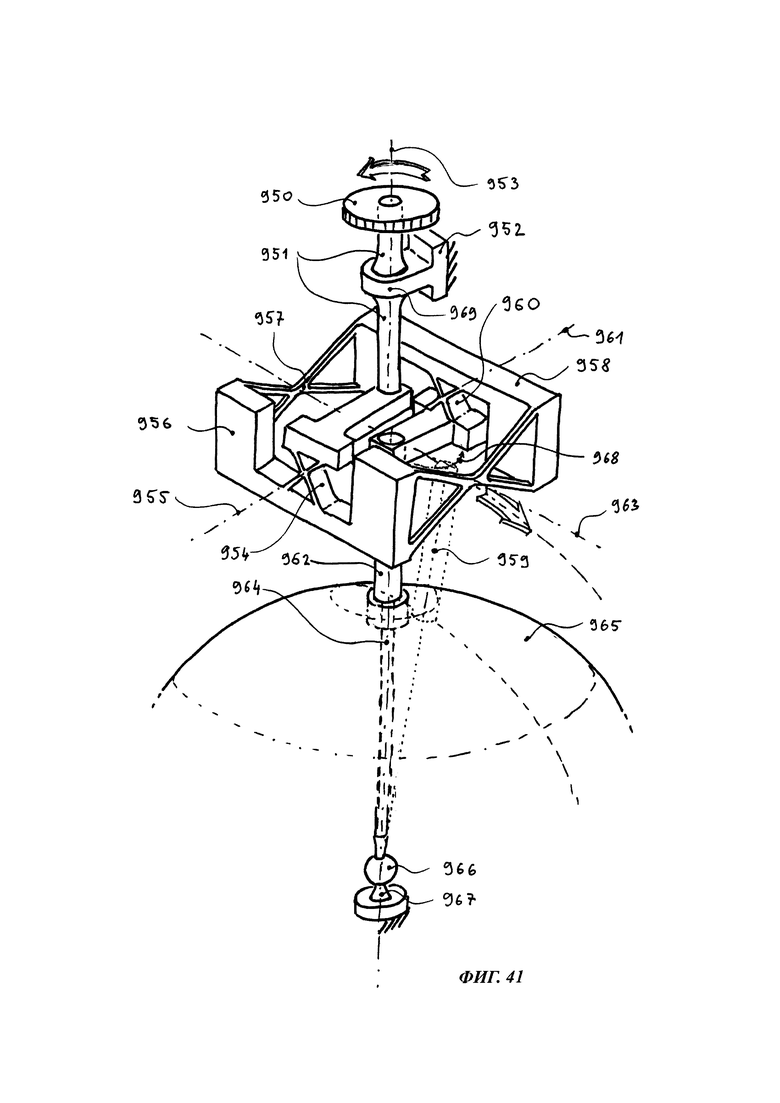
Фиг. 41 иллюстрирует полностью функциональный механизм, реализующий сферический осциллятор с полярной пружиной по фиг. 39 и использующий вращающийся компонент для поддержания энергии осциллятора.
Осуществление изобретения
2 Концептуальная основа изобретения
2.1 Изохронная солнечная система Ньютона
Хорошо известно, что в 1687 г. Исаак Ньютон опубликовал трактат "Математические начала" (Principia Mathematica), в котором он обосновал законы Кеплера о движении планет, в частности первый закон, который утверждает, что планеты движутся по эллиптическим траекториям, в одном фокусе которых находится Солнце, и третий закон, который утверждает, что квадраты периодов обращения планет вокруг Солнца относятся, как кубы больших полуосей их орбит (см. ссылку [19]).
Менее известно, что в Книге 1, ПРОПОЗИЦИИ (лат.PROPOSITIO) X указанного труда он показал, что в случае замены притяжения, обратно пропорционального квадрату расстояния (см. фиг. 1), линейным притяжением центральной силы, закон (названный позднее законом Гука - см. фиг. 2 и 3) соответствовал бы движению планет по эллиптическим орбитам с Солнцем, находящимся в центре эллипса, а период обращения был бы одинаковым для всех эллиптических орбит (присутствие эллипсов в обоих законах в настоящее время объясняется относительно простой математической эквивалентностью (см. ссылку [13])). Хорошо известно также, что только в этих двух случаях законы о центральной силе приводят к замкнутым орбитам (см. ссылку [1]).
Результат Ньютона для закона Гука легко проверяется. Рассмотрим точечную массу, способную двигаться в двумерном пространстве под действием центральной силы
F(r)=-kr,
приложенной из начала координат, где r - положение массы; тогда для объекта массы m, получаем следующее решение:
A1sin(ω0t+ϕ1), A2sin(ω0t+ϕ2),
где константы А1, А2, ϕ1, ϕ2 зависят от начальных условий и частоты,
Отсюда не только следует, что орбиты являются эллиптическими, но и что период движения зависит только от массы m и жесткости k центральной силы. Следовательно, эта модель характеризуется изохронизмом, поскольку период
не зависит от положения и момента точечной массы (аналогично третьему закону Кеплера, доказанному Ньютоном).
2.2 Реализация в качестве регулятора хода в приборе для измерения времени
Изохронизм означает, что рассмотренный осциллятор является хорошим кандидатом для использования в качестве регулятора хода в приборе для измерения времени, т.е. как вариант изобретения.
Данный осциллятор может рассматриваться как вариант изобретения с учетом того, что он не предлагался и даже не упоминался в литературе в качестве подобного регулятора.
Данный осциллятор известен также как гармонический изотропный осциллятор (здесь термин "изотропный "означает "одинаковый во всех направлениях").
Несмотря на то, что он известен с 1687 г., и на его теоретическую простоту, изотропный гармонический осциллятор, или просто "изотропный осциллятор", насколько это известно, ранее никогда не применялся как регулятор хода для наручных или иных часов. Это обстоятельство требует дополнительных пояснений.
Представляется, что главной причиной является фиксация на механизмах с постоянной скоростью, таких как механические регуляторы, в частности регуляторы скорости, а также ограниченный взгляд на конический маятник как на механизм с постоянной скоростью.
Например, в приведенном в работе [8, р. 534] описании конического маятника, потенциально приближающегося к изохронизму, отмечается его применимость к измерению очень малых интервалов времени, намного меньших, чем его период.
Глава VIII книги [3] посвящена коническому маятнику, включая аппроксимацию им изохронизма. Одна из секций этой главы посвящена применению конического маятника для измерения долей секунды (в случае периода, равного 2 с), причем утверждается, что данный подход представляется крайне эффективным. При этом указывается на различие между средней сходимостью и мгновенной сходимостью и признается, что движение конического маятника может не быть постоянным в пределах малых интервалов вследствие трудностей при настройке механизма. Таким образом, вариации в пределах периода рассматриваются как дефекты конического маятника. Это подразумевает, что при идеальных условиях маятник функционирует при постоянстве скорости.
Аналогично, при сопоставлении непрерывного и прерывистого движений в книге [9, 20-21] игнорируется изотропный осциллятор, и единственная приводимая в ней ссылка на прибор для измерения времени с непрерывным движением относится к регулятору (Вилларсо), о котором сообщается: "кажется, что он обеспечивал хорошие результаты. Однако не представляется вероятным, чтобы он был более точным, чем обычный высококачественный задающий часовой механизм или хронограф". Этот вывод подтверждается данными по регулятору Вилларсо, приведенными в статье [4].
С теоретической точки зрения данные вопросы рассмотрены в очень важной работе Джеймса Клерка Максвелла On Regulators ("О регуляторах"), которая рассматривается как одна из послуживших основной для современной теории управления (см. ссылку [18]).
Следует отметить, что изохронизм требует наличия истинного осциллятора, который должен сохранять все изменения скорости. Причина этого требования состоит в том, что волновое уравнение
сохраняет все начальные условия путем их распространения. Таким образом, истинный осциллятор должен сохранять все возмущения его скорости. С учетом этого предлагаемое изобретение допускает максимальную вариацию амплитуды осциллятора.
Это является полной противоположностью по отношению к регулятору, который должен гасить эти возмущения. В принципе возможно получение изотропного осциллятора путем исключения всех демпфирующих механизмов, приводящих к регулированию скорости.
Можно заключить, что изотропный осциллятор не применялся как регулятор хода вследствие существования концептуального недопонимания, сближающего изотропные осцилляторы с обычными регуляторами, т.е. игнорирующего простое соображение, состоящее в том, что точное измерение времени требует постоянства только полного периода, а не всех его более коротких интервалов.
Авторы изобретения утверждают, что предлагаемый осциллятор полностью отличается по своим теоретическим основам и функционированию от конического маятника и механических регуляторов, рассматриваемых далее.
Фиг. 4 иллюстрирует принцип конического маятника, а фиг. 5 - типичный механизм на основе конического маятника.
Фиг. 6 иллюстрирует регулятор Вилларсо, изготовленный Антуаном Бреге (Antoine Breguet) в 1870-х годах, а фиг. 7 - распространение сингулярности по тронутой струне.
2.3 Вращательное, поступательное и качательное орбитальные движения
Возможны два типа изотропных гармонических осцилляторов с однонаправленным движением. Один из них использует линейную пружину, на конце которой закреплено тело, и вращение пружины и тела вокруг фиксированного центра. Такое выполнение с вращающейся пружиной иллюстрируется фиг. 34. Пружина 861 с прикрепленным к ее концу телом 862 прикреплена к центру 860 и вращается вокруг этого центра, так что центр масс тела 862 имеет орбиту 864. Как это отмечено стрелками 863, тело 862 совершает один оборот вокруг своего центра масс за каждый полный оборот по орбите.
Совершение телом, вращающимся вокруг своего центра масс, одного полного оборота за полный оборот по орбите иллюстрируется фиг. 35. Это является примером орбитального движения с вращением: тело 871 движется по орбите вокруг точки 870 и совершает один оборот вокруг своей оси за каждый полный оборот по орбите, как это проиллюстрировано вращением индикатора 872.
Пружина такого типа, которая будет именоваться вращающимся изотропным осциллятором, будет описана в Секции 4.1. В этом случае, поскольку тело вращается вокруг своей оси, момент инерции тела оказывает влияние на динамику.
В другой возможной реализации используется масса, связанная с центральной изотропной пружиной, как это описано в Секции 4.2. В этом случае тело не вращается вокруг своего центра масс, и соответствующее движение может именоваться поступательным орбитальным движением, которое проиллюстрировано фиг. 36. Тело 881 движется по орбите 883 с центром в точке 880, не вращаясь вокруг своего центра тяжести (центра масс). Таким образом, его ориентация остается неизменной, как это иллюстрируется постоянным направлением индикатора 882, связанного с телом.
В этом случае момент инерции массы не влияет на динамику.
В описываемых далее механизмах имеет место качательное движение.
Качательное движение, при котором угловое перемещение происходит в ограниченном интервале углов, а не в форме полных оборотов вокруг центра тяжести тела, соответствует еще одной возможности. Качательное движение проиллюстрировано фиг. 37, на которой представлен изотропный осциллятор, содержащий массу 892, осциллирующую в шарнире 891, который связывает ее с неподвижным основанием 890 через жесткую стойку 896. Это соответствует орбитальному движению посредством поступательного перемещения, как это можно продемонстрировать, закрепив на осциллирующей массе 892 жесткий стержень 893 с закрепленной на его конце стрелкой 894. Поступательный характер орбитального перемещения подтверждается постоянством ориентации стрелки, которая всегда имеет направление 895.
2.4 Интегрирование изотропного гармонического осциллятора в стандартное механическое движение
Предлагаемый регулятор хода, использующий изотропный осциллятор, будет регулировать механический прибор для измерения времени. Это можно реализовать простой заменой колебательной системы с балансирным колесом и спиральной пружиной изотропным осциллятором и спусковым механизмом с вращающимся компонентом, прикрепленным к последнему колесу зубчатой передачи. Известный вариант показан на фиг. 38 слева. Главная пружина 900 передает энергию через систему 901 зубчатых колес спускному колесу 902, которое дискретными порциями передает энергию балансирному колесу 905 через анкер 904. Справа показан предложенный механизм. Главная пружина 900 передает энергию через систему 901 зубчатых колес кулисе 903, которая непрерывно передает энергию изотропному осциллятору 906 через палец 907, перемещающийся в прорези этой кулисы. Изотропный осциллятор прикреплен к неподвижной рамке 908, и его центр восстанавливающей силы совпадает с центром шестерни, связанной с кулисой.
3 Теоретические требования к физической реализации
Чтобы реализовать изотропный гармонический осциллятор согласно изобретению, требуется физическая конструкция, обеспечивающая центральную восстанавливающую силу. Теория движения массы относительно центральной восстанавливающей силы исходит из того, что результирующее движение лежит в плоскости. Однако далее будет рассмотрен более общий изотропный гармонический осциллятор, в котором идеальное планарное движение не соблюдается, но механизм все же сохраняет желательные свойства гармонического осциллятора.
Чтобы получить при физической реализации изохронные орбиты для регулятора хода, необходимо как можно ближе следовать теоретической модели, изложенной в Секции 2. Жесткость k пружины является независимой от направления и постоянной, а также независимой от радиального положения (т.е. пружина является линейной). В теории масса является точечной и, следовательно, имеющей, в отсутствие вращения, момент инерции J=0. Приведенная масса m является изотропной и также независимой от положения. Результирующий механизм желательно сделать нечувствительным к силе тяжести и к линейным и угловым ударам. Таким образом, должны выполняться следующие условия.
Изотропность k. Жесткость k пружины изотропна (не зависит от направления).
Радиальность k. Жесткость k пружины не зависит от радиального смещения (линейная пружина).
Нулевой J. Масса m с моментом инерции J=0.
Изотропность m. Приведенная масса m изотропна (не зависит от направления).
Радиальность m. Приведенная масса m не зависит от радиального смещения.
Сила тяжести. Нечувствительность к силе тяжести.
Линейный удар. Нечувствительность к линейному удару.
Угловой удар. Нечувствительность к угловому удару.
4 Реализация изотропного гармонического осциллятора
4.1 Изотропия посредством радиально симметричных пружин (объемов вращения)
Изотропия будет реализована посредством радиально симметричных пружин, которые являются изотропными вследствие изотропии вещества. Простейший пример показан на фиг. 20: к неподвижному основанию 601 прикреплен гибкий стержень 602, к концу которого прикреплена масса 603. Гибкий стержень 602 создает для массы 603 восстанавливающую силу, так что механизм стремится вернуться в нейтральное состояние, изображенное штриховыми линиями. Масса 603 будет двигаться в одном направлении по орбите вокруг своего нейтрального состояния. Далее будет указано, какие теоретические свойства согласно Секции 3 имеют место для этих реализаций (с точностью до первого порядка).


Можно модифицировать конструкцию по фиг. 20 так, как это показано на фиг. 21А и 21В, чтобы получить пленарное движение, реализовав изотропный осциллятор с двумя стержнями. Как показано на фиг. 21А (на виде сбоку, в разрезе) к неподвижной рамке 611 прикреплены два коаксиальных гибких стержня 612 и 613 с круглым поперечным сечением, удерживающие своими концами массу 614. Стержень 612 отделен в осевом направлении от рамки 611 посредством гибкой конструкции 619 типа шарнира с одной степенью свободы, чтобы радиальная жесткость могла обеспечить линейную восстанавливающую силу для механизма. Стержень 612 проходит через радиальную прорезь 617, выполненную в приводном кольце 615. На фиг. 21В (на виде сверху) показано, что кольцо 615 направляется тремя роликами 616 и приводится во вращение зубчатым колесом 618. При приложении к колесу крутящего момента энергия передается указанной массе, поддерживая ее движение. Свойства механизма приведены в нижеследующей таблице.

Движение, являющееся пленарным в большей степени, может быть реализовано так, как это показано на фиг. 22, иллюстрирующей изотропный осциллятор с тремя стержнями. К неподвижной рамке 620 прикреплены три параллельных гибких стержня 621 с круглым поперечным сечением. К стержням 621 прикреплена пластина 622, которая движется как орбитальная масса. Такое гибкое сочленение дает массе 622 три степени свободы: два криволинейных поступательных перемещения, создающие орбитальное движение, и вращение вокруг оси, параллельной стержням (в рамках изобретения это вращение не используется). Свойства механизма таковы:

Идеально планарное движение может быть достигнуто удвоением механизма по фиг. 22 с получением, как это показано на фиг. 23А и на фиг. 23В (на виде сверху), изотропного осциллятора с 6 параллельными стержнями. К неподвижной рамке 630 прикреплены три параллельных гибких стержня 631 с круглым поперечным сечением. Стержни 631 прикреплены также к легкой промежуточной пластине 632. К пластине 632 прикреплены также параллельные гибкие стержни 633, прикрепленные, кроме того, к подвижной пластине 634, выполняющей функцию орбитальной массы. Эта гибкая конструкция обеспечивает пластине 634 три степени свободы: два прямолинейных поступательных перемещения, создающие орбитальное движение, и вращение вокруг оси, параллельной стержням (в рамках изобретения это вращение не используется). Свойства механизма таковы:

Можно использовать также гибкую мембрану, которая обеспечивает изотропную восстанавливающую силу благодаря изотропии ее материала. На фиг. 25А и 25В показан динамически сбалансированный осциллятор в форме гантели (далее "гантельный" осциллятор), использующий такую мембрану. Жесткий стержень 678, 684 связан с неподвижным основанием 676 через гибкую мембрану 677, обеспечивающую стержню две угловые степени свободы (вращение вокруг его оси не разрешено). Орбитальные массы 679 и 683 прикреплены к концам стержня. Центр силы тяжести жесткого тела 678, 684, 683, 679 находится на пересечении плоскости мембраны и оси стержня, так что линейные ускорения по любым направлениям не создают крутящего момента, действующего на систему. К массе 679 на продолжении оси стержня прикреплен палец 680, который входит в радиальную прорезь вращающейся кулисы 681. Кулиса связана с неподвижным основанием через шарнир 682. Приводной крутящий момент приложен к оси кулисы, которая воздействует на орбитальную массу 679, поддерживая тем самым систему в движении. Поскольку гантель является сбалансированной, она принципиально нечувствительна к линейному ускорению, включая действие силы тяжести. Свойства механизма таковы:

4.2 Изотропия посредством комбинации несимметричных пружин.
Имеется возможность получить изотропную пружину, комбинируя пружины таким образом, что результирующая восстанавливающая сила будет изотропной.
На фиг. 26 представлен динамически сбалансированный "гантельный" осциллятор с подвеской на четырех стержнях. Жесткий стержень 689-690 связан с неподвижной рамкой 685 посредством четырех гибких стержней, образующих универсальный шарнир (детали которого проиллюстрированы на фиг. 27, 28А и 28В). Три стержня лежат в горизонтальной плоскости 686, перпендикулярной к оси жесткого стержня 689-690, а четвертый стержень 687 находится на вертикальной оси стержня 689-690. Две орбитальные массы 691, 692 прикреплены к концам жесткого стержня. Центр тяжести жесткого тела 691, 689, 690, 692 находится на пересечении плоскости 686 и оси жесткого стержня, так что линейные ускорения по любым направлениям не создают крутящего момента, действующего на систему. К массе 692 на продолжении оси стержня 690 прикреплен палец 693, который входит в радиальную прорезь вращающейся кулисы 694. Кулиса связана с неподвижным основанием через шарнир 695. Приводной крутящий момент создается предварительно напряженной геликоидальной пружиной 697, прикладывающей тянущее усилие к нити 696, намотанной на катушку, которая прикреплена к оси кулисы. Свойства механизма таковы:

На фиг. 27 осциллятор по фиг. 26 показан в частичном разрезе, чтобы проиллюстрировать универсальный шарнир на базе четырех гибких стержней. Гибкая конструкция с четырьмя степенями свободы, аналогичная конструкции по фиг. 28А и 28В, связывает жесткую рамку 705 с подвижной трубкой 708. Для обеспечения механического соединения использована коническая насадка 707. Рамку 705 связывает с трубкой 708 четвертый вертикальный стержень 712, образующий цельную деталь с жестким стержнем 711 большего диаметра, который связан с трубкой 708 горизонтальным штифтом 709. Такое выполнение обеспечивает трубке 708 две угловые степени свободы относительно рамки 705. Свойства механизма таковы:

В механизмах по фиг. 26 и 27 используется гибкая конструкция с четырьмя степенями свободы, показанная на фиг. 28А и 28В. Подвижное жесткое тело 704 связано с неподвижной рамкой 700 посредством трех стержней 701, 702 и 703, лежащих в одной горизонтальной плоскости. Стержни ориентированы под углом 120° друг к другу. В альтернативных конфигурациях углы между стержнями могут быть иными.
Альтернативная "гантельная" конструкция (динамически сбалансированный "гантельный" осциллятор с подвеской на трех стержнях) представлена (представлен) на фиг. 29. Жесткий стержень 717, 718 прикреплен к неподвижной рамке 715 посредством трех гибких стержней 716, образующих шаровой шарнир. Палец 721, параллельный оси устройства, прикреплен к массе 720. Этот палец входит в радиальную прорезь вращающейся кулисы 722, связанной с неподвижным основанием посредством шарнира 723. Центр тяжести жесткого тела 717, 718, 719, 720 находится на пересечении трех гибких стержней и является кинематическим центром вращения шарового шарнира, так что линейные ускорения по любым направлениям не создают крутящего момента, действующего на систему. Приводной крутящий момент приложен к оси кулисы. Свойства механизма таковы:

4.3 Изотропные гармонические осцилляторы со сферической массой
Конструкция со сферической массой представлена на фиг. 30. Сферическая масса 768 (заполненная или полая сфера) соединена с кольцевой рамкой 760 посредством деформируемого механизма, состоящего из детали 761-767, а также деталей 769 и 770. Детали 769 и 770 (рассмотренные далее) аналогичны по конструкции детали 761-767. Сфера соединена с деталью 761-767 на участке 767 (и с ее аналогами 769 и 770) и, тем самым, связана с неподвижной рамкой 760 на участке 761. Деталь 761-767 является деформируемым механизмом с тремя степенями свободы, прорези 762 и 764 в котором образуют гибкие шарниры. Планарная конфигурация детали 761-770 образует универсальный шарнир, у которого оси поворота лежат в плоскости кольцевой рамки 760. Более конкретно, сфера не может поворачиваться вокруг осей 771-779. Для малых амплитуд движение сферы является таким, что палец 772 описывает эллиптическую орбиту, как и симметричный ему палец 779 (его орбита обозначена, как 780). Вращение сферы поддерживается посредством компонента 776, жестко связанного с кулисой 774. Принимается, что кулиса 774 имеет крутящий момент 777 и шарнирно связана с рамкой, например посредством шарикоподшипника, у компонента 776. Палец 771 жестко связан со сферой и в процессе ее вращения будет перемещаться вдоль прорези 774, так что он сместится с оси 776. В результате крутящий момент 777 создает усилие, действующее на палец 771 и поддерживающее вращение сферы. Центр 778 тяжести сферы 768 находится на пересечении плоскости рамки 760 и оси пальцев 771, 779, так что линейные ускорения по любым направлениям не создают крутящего момента, действующего на систему. Альтернативная конструкция предусматривает удаление всех прорезей 764 на всех трех деталях. Другие альтернативные конструкции используют 1, 2, 4 или более деталей. Свойства механизма таковы:

На фиг. 31-33 представлен альтернативный механизм со сферой, соответствующий реализации гармонического осциллятора с двумя вращательными степенями свободы. Сферическая масса 807 (заполненная или полая сфера с цилиндрическим отверстием, формирующим пространство для введения гибкого стержня 811) соединена с неподвижной рамкой 800 и с фиксированным блоком 801 посредством деформируемого механизма с двумя вращательными степенями свободы. Данный механизм состоит из жесткой пластины 806, несущей сферу 807, трех копланарных (лежащих в плоскости Р, см. фиг. 33) гибких стержней 803, 804, 805 и четвертого гибкого стержня 811, перпендикулярного плоскости Р. Имеются также три жестких неподвижных блока 802, зажимающих неподвижные концы стержней. Активная длина (расстояние между двумя точками фиксации) стержня 811 обозначена на фиг. 33, как L. Точка пересечения (обозначенная на фиг. 33, как А) плоскости Р и оси стержня 811 находится точно в центре тяжести сферы 807. Чтобы повысить точность механизма, плоскость Р должна пересекать стержень 811 на расстоянии Н=L/8 от точки его фиксации в сфере 807. Это соотношение устраняет паразитные смещения, которые сопровождают повороты гибких шарниров. Данный деформируемый механизм обеспечивает две вращательные степени свободы сферы 807, соответствующие вращениям вокруг осей, лежащих в плоскости Р и проходящих через точку А. (Примечание: эти степени свободы такие же, что и обеспечиваемые классическим шарниром с постоянной скоростью, связывающим массу 807 с невращающимся основанием 800 и 801 и блокирующим, тем самым, вращение массы 807 вокруг оси, коллинеарной оси пальца 808). Наличие данного механизма приводит к движениям сферы (в частности полой сферы) 807, свободным от любых смещений центра тяжести сферы. Как результат, этот осциллятор в высокой степени нечувствителен к силе тяжести и к линейным ускорениям во всех направлениях.
На оси стержня 811 к сфере 807 прикреплен жесткий палец 808, концу 812 которого придана сферическая форма. При осцилляции сферы 807 вокруг своего нейтрального положения конец пальца 808 движется по непрерывной траектории (орбите), обозначенной, как 810.
Этот конец 812 пальца 808 входит в прорезь 813 (см. фиг. 33), выполненную в приводной кулисе 814, ось вращения которой коллинеарна с осью стержня 811. При приложении к кулисе 814 приводного крутящего момента она будет толкать конец 812 пальца 808 вперед, перемещая его по орбитальной траектории, поддерживая, тем самым, механизм в непрерывном движении даже в присутствии механических потерь (эффектов торможения). Свойства механизма таковы:

Альтернативный вариант механизма со сферой представлен на фиг. 39, 40 и 41.
На фиг. 39 представлена двумерная иллюстрация принципа центральной восстанавливающей силы на основе использования полярной пружины, т.е. такой линейной пружины 916, которая прикреплена к "северному" (верхнему) полюсу 913 осциллирующей сферы 910. Пружина 916 связывает конец 913 приводного пальца 915 с точкой 914. Точка 914 соответствует положению конца 913 пальца 915, когда сфера 910 находится в нейтральном положении, т.е. точки 913 и 914 находятся на одинаковом расстоянии r от центра сферы. Нейтральное положение сферы - это положение способной вращаться сферы, при котором ось 918 приводного пальца 915 коллинеарна с осью вращения приводного компонента (обозначенной, как 923 на фиг. 40 и как 953 на фиг. 41). Постоянная скорость шарнира 911 гарантирует, что это положение является уникальным (единственным), т.е. соответствующим уникальному положению сферы при ее вращении. Пружина 916 создает упругую восстанавливающую силу F=-kX (где k - постоянная жесткости пружины), пропорциональную удлинению пружины (X - это расстояние между точками 914 и 913). Сила F направлена вдоль линии, соединяющей точки 914 и 913. Осциллирующей массой является сфера (в частности полая сфера) 910, которая связана с неподвижным основанием 912 через соединение 911, обеспечивающее постоянную скорость. Соединение 911 имеет 2 вращательные степени свободы и блокирует третью вращательную степень свободы сферы, соответствующую вращению вокруг оси 918. Возможный вариант соединения 911 - это упругая подвеска посредством четырех стержней, представленная на фиг. 31, 32 и 33, или пленарный механизм, показанный на фиг. 30. Такое выполнение дает в результате нелинейный центральный восстанавливающий крутящий момент на сфере: М=-2kr2sin(α/2). Динамическое моделирование свободных осцилляций этого механизма с полярной пружиной в форме круговых орбит с постоянной скоростью при постоянной широте и в предположении о нулевой жесткости соединения 911 показывает, что свободные осцилляции имеют одинаковый период для всех углов α. Следовательно, осциллятор является полностью изохронным на таких орбитах и может использоваться как прецизионный регулятор хода.
Фиг. 40 - это трехмерная иллюстрация кинематической модели концептуального механизма, представленного на фиг. 39. Приводному колесу 920 придается приводной крутящий момент. Вал 921 приводного колеса проходит через подшипник 939, вращающийся вокруг оси 923 и прикрепленный к неподвижному основанию 922. Шарнир 924 поворачивается вокруг оси 925, перпендикулярной к оси 923, и связывает вал 921 с вилкой 926. Вал вилки 926 имеет две степени свободы: он является телескопическим (что дает одну поступательную степень свободы по оси 933) и может поворачиваться вокруг оси 933 (что дает валу вращательную степень свободы). Линейная полярная пружина 927 воздействует на телескопическую степень свободы вала, создавая восстанавливающую силу пружины 916 по фиг. 39. Вторая вилка 930 на втором конце вала несет шарнир, поворачивающийся вокруг оси 931, пересекающей под прямым углом ось 929 пальца, и связанный с промежуточным цилиндром 932. Цилиндр 932 установлен на приводной палец 934 сферы 935 через шарнир, вращающийся вокруг оси 929 пальца. Осциллирующей массой является сфера (в частности полая сфера) 935, которая связана с неподвижным основанием 937 через соединение 936, обеспечивающее постоянную скорость. Соединение 936 имеет 2 вращательные степени свободы и блокирует третью вращательную степень свободы сферы, соответствующую вращению вокруг оси 929. Возможный вариант соединения 936 - это упругая подвеска посредством четырех стержней, представленная на фиг. 31, 32 и 33, или пленарный механизм, показанный на фиг. 30. Механизм в целом имеет две степени свободы и не является переограниченным. Он реализует упругую восстанавливающую силу и использует приводной компонент, создающий крутящий момент (см. фиг. 39), который может быть приложен к приводному колесу 920 для передачи на сферу, поддерживая тем самым осциллирующее движение по орбите 938.
На фиг. 41 представлен возможный вариант механизма по фиг. 40.
Приводному колесу 950 придается приводной крутящий момент. Вал 951 приводного колеса проходит через подшипник 969, вращающийся вокруг оси 953 и прикрепленный к неподвижному основанию 952. Гибкий шарнир 954 поворачивается вокруг оси 955, перпендикулярной к оси 953, и связывает вал 951 с телом 956. Тело 956 связано с телом 958 посредством гибкой конструкции 957, имеющей две степени свободы: одну поступательную степень свободы по оси 963 и одну вращательную степень свободы вокруг оси 963. В дополнение к этой кинематической функции, конструкция 957 создает упругую восстанавливающую силу (аналогично функции пружины 927 по фиг. 40 или пружины 916 по фиг. 39), которая починяется закону F=-kX. Таким образом, восстанавливающая сила увеличивается пропорционально X и равна нулю, когда сфера находится в своем нейтральном положении. Нейтральное положение определяется, как положение, в котором ось 959 приводного пальца и ось 953 вала приводного колеса коллинеарны. Как и на фиг. 39, нейтральное положение сферы является уникальным вследствие свойств соединения 966. Второй гибкий шарнир 960, поворачивающийся вокруг оси 961, пересекающей под прямым углом ось 959 пальца, связывает тело 958 с промежуточным цилиндром 962. Цилиндр 962 установлен на приводной палец 964 сферы 965 через шарнир, вращающийся вокруг оси 959 пальца. Осциллирующей массой является сфера (в частности полая сфера) 965, которая связана с неподвижным основанием 967 через соединение 966, обеспечивающее постоянную скорость. Соединение 966 имеет 2 вращательные степени свободы и блокирует третью вращательную степень свободы сферы, соответствующую вращению вокруг оси 969. Возможный вариант соединения 966 - это упругая подвеска посредством четырех стержней, представленная на фиг. 31, 32 и 33, или пленарный механизм, показанный на фиг. 30. Механизм в целом имеет две степени свободы. Он реализует упругую восстанавливающую силу и использует приводной компонент, создающий крутящий момент (см. фиг. 39), который может быть приложен к приводному колесу 950 для передачи на сферу, поддерживая тем самым осциллирующее движение по орбите 968.
4.4 XY-поступательные изотропные гармонические осцилляторы
Могут быть сконструированы изотропные гармонические осцилляторы, использующие ортогональные поступательные пружины, лежащие в плоскости XY. Однако такие конструкции являются предметом параллельной заявки и поэтому в данном описании не рассматриваются.
5 Компенсационные механизмы
Чтобы встроить, согласно варианту изобретения, новый осциллятор в портативный прибор для измерения времени, необходимо решить проблему сил, которые могут влиять на правильное функционирование осциллятора. Эти силы включают силу тяжести и ударные нагрузки (удары).
5.1 Компенсация силы тяжести
Применительно к портативному прибору для измерения времени необходима компенсация.
Она может быть достигнута изготовлением копии осциллятора и соединением обоих экземпляров посредством шарового или универсального шарнира, как это иллюстрируется фиг. 24А и 24В, на которых представлен осциллятор, сбалансированный динамически, радиально и по углам и построенный на основе двух консольных компонентов. Более конкретно, каждый из двух коаксиальных гибких стержней 665 и 666 с круглым поперечным сечением несет на своем конце орбитальную массу 667 и 668 соответственно. Массы 668 и 667 связаны с двумя сферами 669 и 670 соответственно посредством соединения, использующего цилиндрический штифт, связанный с массой с возможностью углового перемещения в цилиндрическом отверстии, выполненном в сфере. Сферы 669 и 670 установлены на жесткий стержень 671, чтобы сформировать два шаровых шарнира. Стержень 671 прикреплен к жесткой неподвижной рамке 664 посредством шарового шарнира 672. Такая кинематическая схема вынуждает две орбитальные массы 668 и 667 двигаться с взаимным смещением на 180°, находясь на одинаковом радиальном расстоянии от своих нейтральных положений. Поддерживающий механизм содержит вращающееся кольцо 673, имеющее прорезь, через которую проходит гибкий стержень 665. Кольцо приводится зубчатым колесом 675, к которому прикладывается приводной крутящий момент, во вращение, направляемое тремя роликами 674. Свойства механизма таковы:

Другой способ балансирования осцилляторов посредством копирования иллюстрируется фиг. 11, где представлены две копии механизма по фиг. 22, сбалансированные описанным образом. В этом варианте неподвижная пластина 71 несет регулятор хода, содержащий две симметрично расположенные связанные (не независимые) пленарные изотропные орбитальные массы 72. Каждая орбитальная масса 72 связана с неподвижной пластиной тремя параллельными стержнями 73, которые являются либо гибкими стержнями, либо жесткими стержнями с шаровым шарниром 74 на каждом конце. Тяга 75 прикреплена к неподвижному основанию посредством (необозначенного) гибкого мембранного соединения и гибкого вертикального стержня 78, образующих универсальный шарнир. Концы тяги 75 прикреплены к орбитальным массам 72 двумя гибкими мембранами 77. Часть 79 жестко связана с частью 71. Части 76 и 80 жестко связаны с тягой 75. Свойства механизма таковы:

5.2 Динамическая балансировка линейного ускорения
Линейные удары (ударные нагрузки) соответствуют линейному ускорению, т.е. включают, как частный случай, силу тяжести. Следовательно, механизм по фиг. 20 компенсирует также линейные удары.
5.3 Динамическая балансировка углового ускорения
Эффекты, обусловленные угловыми ускорениями, могут быть минимизированы за счет уменьшения расстояния между центрами тяжести двух масс. При этом учитываются только угловые ускорения по всем возможным осям вращения, за исключением ускорений по оси вращения рассматриваемых осцилляторов.
Подобная балансировка достигнута в описанном выше механизме по фиг. 24А и 24В. Свойства механизма таковы:

Описанный выше вариант по фиг. 11 также сбалансирован в отношении угловых ускорений благодаря малому расстоянию движущихся масс 72 от центра масс, находящегося вблизи стержня 78. Свойства механизма таковы:

6 Поддержание и счет
Осцилляторы теряют энергию вследствие трения, так что требуется способ поддерживания энергии осциллятора. Требуется также способ для подсчета колебаний, чтобы отображать время, измеряемое осциллятором. В механических, в частности наручных, часах эти задачи решаются с помощью спускового механизма, который является интерфейсом между осциллятором и остальной частью прибора для измерения времени. Принцип действия спускового механизма иллюстрируется на фиг. 10, причем подобные устройства хорошо известны в часовой промышленности.
В рамках изобретения предлагаются два основных способа решения той же задачи: без спускового механизма и с упрощенным спусковым механизмом.
6.1 Механизмы без спускового механизма
Чтобы снабжать энергией изотропный гармонический осциллятор, к нему прикладывают крутящий момент или усилие. На фиг. 8 иллюстрируется принцип непрерывного приложения крутящего момента Т для поддержания энергии осциллятора, а фиг. 9 иллюстрирует другой принцип, согласно которому, чтобы поддерживать энергию осциллятора, к нему дискретно (прерывисто) прикладывают силу FT. На практике, в частности в рассматриваемом случае, требуется также механизм, чтобы передать на осциллятор подходящий крутящий момент с целью поддержания его энергии. Предложенные для этой цели различные варианты вращающегося компонента согласно изобретению показаны на фиг. 12-16. Фиг. 18 и 19 иллюстрируют спусковые системы для той же цели. Все эти механизмы для восстановления энергии могут быть использованы в комбинации с различными рассматриваемыми вариантами осцилляторов и осцилляторных систем (с использованием различных блоков). В типичном случае в варианте изобретения, в котором осциллятор используется как регулятор хода в приборе для измерения времени, в частности в наручных часах, крутящий момент/усилие может создаваться часовой пружиной наручных часов, используемой в сочетании со спусковым механизмом, как это хорошо известно применительно к наручным часам. Следовательно, в этом варианте известный спусковой механизм может быть заменен осциллятором по изобретению.
Фиг. 12 иллюстрирует принцип поддержания энергии осциллятора с использованием вращающегося компонента с переменным радиусом. Стержень 83, установленный на ось 82, вращается относительно неподвижной рамки 81. Призматическое сочленение 84 позволяет обеспечить изменяемый радиус вращения конца стержня. Орбитальная масса регулятора (не изображена) прикреплена к концу стержня через цапфу 85. В результате данный механизм не изменяет ориентацию орбитальной массы, тогда как стержень 83 обеспечивает поддержание энергии колебаний.
Фиг. 13А и 13В иллюстрируют реализацию кулисы с переменным радиусом, прикрепленной к осциллятору для поддержания его энергии. Неподвижная рамка 91 несет ось 92 кулисы, к которой приложен поддерживающий энергию крутящий момент М. Кулиса 93, прикрепленная к оси 92, снабжена призматической прорезью 93'. В прорезь 93' введен жесткий палец 94, прикрепленный к орбитальной массе 95. Пленарные изотропные пружины обозначены, как 96. На фиг. 13А и 13В представлены соответственно перспективное изображение, в разрезе, и вид сверху.
Фиг. 14 вариант компонента с переменным радиусом и гибкими элементами, служащего для поддержания энергии осциллятора. Компонент 102 приводится, посредством вала 105, во вращение относительно неподвижной рамки (не изображена). Два параллельных гибких стержня 103 связывают компонент 102 с его концевым участком 101. Шарнир 104 связывает механизм, показанный на фиг. 14, с орбитальной массой. На фиг. 14 механизм показан в своем единственном нейтральном положении.
Фиг. 15 иллюстрирует другой вариант компонента с гибкими элементами и с переменным радиусом для поддержания энергии осциллятора. Компонент 112 приводится, посредством вала 115, во вращение относительно неподвижной рамки. Два параллельных гибких стержня 113 связывают компонент 112 с его концевым участком 111. Шарнир 114 связывает данный механизм с орбитальной массой. На фиг. 15 механизм показан в положении, смещенном с нейтрального положения.
Фиг. 16 иллюстрирует альтернативный вариант компонента с гибкими элементами и с переменным радиусом для поддержания энергии осциллятора. Компонент 122 приводится, посредством своего вала, во вращение относительно неподвижной рамки 121. Два параллельных гибких стержня 123 связывают компонент 122 с его концевым участком 124. Шарнир 126 связывает данный механизм с орбитальной массой 125. В этом варианте средний радиус орбиты соответствует минимальному изгибу гибких стержней 123.
6.2 Упрощенные спусковые механизмы
Преимущество использования спускового механизма состоит в том, что осциллятор не будет непрерывно находиться в контакте (через систему зубчатых колес) с источником энергии, что могло бы быть источником хронометрической погрешности. Следовательно, спусковые механизмы должны быть свободными спусковыми механизмами, позволяющими осциллятору вибрировать без помех со стороны спускового механизма на протяжении значительной доли его колебаний.
Спусковые механизмы являются упрощенными по сравнению со спусковыми механизмами для балансирного колеса, поскольку осциллятор поворачивается в единственном направлении. Поскольку балансирное колесо совершает возвратное движение, спусковые механизмы наручных часы, как правило, требуют наличия рычага, чтобы придавать импульс в одном из двух направлений.
Первый спусковой механизм для часов, полностью пригодный для предлагаемого осциллятора, - это хронометронный, или свободный спусковой механизм (см. [6, 224-233]). Данный спусковой механизм (спуск) может быть использован в варианте с пружинкой или с поворотным элементом без какой-либо модификации, за исключением удаления пружинки, функционирующей при повороте обычного часового балансирного колеса в обратную сторону (см. [6, фиг. 471 с]). Например, в показанном на фиг. 4 указанной работы классическом свободном спуске может быть сохранен весь механизм за исключением золотой пружинки I, функция которой больше не нужна.
А. Буасс (Н. Bouasse) описал свободный спуск для конического маятника (см. [3, 247-248]), имеющий сходство с рассматриваемым в данном описании. Однако он считал ошибкой прикладывать дискретный импульс к коническому маятнику. Этот вывод мог быть связан с обсужденным выше предположением, что конический маятник всегда функционирует с постоянной скоростью.
6.3 Усовершенствование свободного спуска для изотропного гармонического осциллятора
Варианты возможных свободных спусков для изотропного гармонического осциллятора показаны на фиг. 17-19.
Фиг. 17 иллюстрирует упрощенный классический часовой свободный спуск для изотропного гармонического осциллятора. Обычный упор для обеспечения возможности обратного движения был удален в связи с однонаправленным вращением осциллятора.
Фиг. 18 иллюстрирует вариант свободного спуска для поступательно движущейся орбитальной массы. Два параллельных зубца 151 и 152 прикреплены к орбитальной массе (не изображена, но схематично обозначена стрелками 156, образующими окружность), так что их траектории соответствуют синхронным поступательным перемещениям. Зубец 152 смещает упор 154, который способен шарнирно поворачиваться на пружине 155, освобождая спускное колесо 153. Спускное колесо сообщает толчок зубцу 151, восстанавливая энергию, потерянную осциллятором.
Фиг. 19 иллюстрирует вариант нового свободного спуска для поступательно перемещающейся орбитальной массы. Два параллельных зубца 161 и 162 прикреплены к орбитальной массе (не изображена), так что их траектории соответствуют синхронным поступательным перемещениям. Зубец 162 смещает упор 164, который способен поворачиваться на пружине 165, освобождая спускное колесо 163. Спускное колесо сообщает толчок зубцу 161, восстанавливая энергию, потерянную осциллятором. Механизм, представленный на фиг. 19 на видах спереди и сверху, позволяет изменять радиус орбиты.
7 Отличие от известных механизмов
7.1 Отличие от конического маятника
Конический маятник - это маятник, вращающийся вокруг вертикальной оси, т.е. оси, параллельной силе тяжести (см. фиг. 4). Теория конического маятника была впервые описана Христианом Гюйгенсом (см. ссылки [16] и [7]), который показал, что, как и обычный маятник, конический маятник не является изохронным, но, в теории, может быть сделан изохронным при использовании гибкой нити и параболоидной конструкции.
Однако, как и циклоидные дуги для обычного маятника, эта предложенная Гюйгенсом модификация, также основанная на гибком маятнике, на практике не повысила точность измерения времени. Конический маятник никогда не был использован в качестве регулятора хода для точных часов.
Несмотря на свой потенциал для точного измерения времени, конический маятник постоянно описывается как средство для получения равномерного движения с целью точного измерения малых временных интервалов (см., например, описание конического маятника в книге [8, р. 534]).
Теоретический анализ конического маятника был проведен в книгах [11], [12, р. 199-201]; был сделан вывод, что его потенциал в качестве регулятора хода в часах в принципе хуже, чем у кругового маятника вследствие принципиального отсутствия изохронизма.
Конический маятник использовался в точных часах, но никогда в качестве регулятора хода. В частности, в 1860-х гг. Вильям Бонд (William Bond) сконструировал точные часы с коническим маятником, который, однако, был частью спускового механизма, тогда как регулятором хода служил круговой маятник (см. ссылки [10] и [25, р. 139-143]).
Предлагаемое изобретение, следовательно, превосходит конический маятник применительно к измерению времени, поскольку предлагаемый осциллятор обладает изохронизмом. Кроме того, изобретение может использоваться в наручных часах или в других портативных приборах для измерения времени, поскольку его основу составляет пружина, что невозможно для конического маятника, который применим только к прибору для измерения времени, имеющему постоянную ориентацию относительно силы тяжести.
7.2 Отличие от механических регуляторов
Регуляторы - это механизмы, которые поддерживают постоянную скорость. Простейшим примером является регулятор Уатта для паровой машины. В 19-м веке эти регуляторы применялись, когда плавное, безостановочное функционирование, в отличие от прерывистого движения часового механизма, основанного на осцилляторе со спусковым механизмом, являлось более важным, чем высокая точность. В частности, такие механизмы требовались для телескопов для отслеживания перемещения звезд, следуя за движением небесной сферы, за относительно короткие интервалы времени. В высокой хронометрической точности в этих случаях не было необходимости в связи с использованием коротких временных интервалов.
Образец такого механизма был построен Антуаном Бреге (см. ссылку [4]), для управления телескопом Парижской обсерватории, а его теория была описана Ивоном Вилларсо (Yvon Villarceau), см. ссылку [24]. Данный механизм был основан на регуляторе Уатта и также предназначался для поддерживания относительно постоянной скорости, так что, хотя он и именовался изохронным регулятором, он не может считаться истинным изохронным осциллятором, подобным описанному выше. Согласно Бреге, суточный ход был между 30 с/сутки и 60 с/сутки (см. ссылку [4]).
В связи с присущими гармоническим осцилляторам особыми свойствами, вытекающими из волнового уравнения (см. Секцию 8), механизмы с постоянной скоростью не являются истинными осцилляторами, и всем таким механизмам присуща ограниченная хронометрическая точность.
Регуляторы использовались в точных часах, но никогда в качестве регулятора хода. В частности, в 1869 г. Уильям Томсон, лорд Кельвин, сконструировал и построил астрономические часы, спусковой механизм которых был основан на механическом регуляторе, тогда как регулятором хода был маятник (см. ссылки [23], [21, р. 133-136], [25, р. 144-149]). Действительно, название его работы, посвященной часам, указывает, что они используют "равномерное движение" (см. ссылку [23]), т.е. явно отличаются в этом отношении от изобретения.
7.3 Отличие от других приборов для измерения времени с непрерывным движением
Было разработано по меньшей мере двое ручных часов с непрерывным движением, механизм которых не прекращает/возобновляет движение, т.е. не страдает от необязательных повторяющихся ускорений. Эти два примера соответствуют наручным часам Salto фирмы Asulab, см. ссылку [2], и Spring Drive фирмы Сейко (Seiko), см. ссылку [22]. В то время как оба эти механизма обеспечивают высокий уровень хронометрической точности, они полностью отличаются от изобретения, поскольку не применяют изотропный осциллятор как регулятор хода, а вместо этого используют колебания кварцевого камертона. При этом данный камертон требует пьезоэлектрических средств, чтобы поддерживать и подсчитывать колебания, и наличия интегральной схемы, чтобы управлять этими процессами. Непрерывное движение возможно только благодаря электромагнитному тормозу, также управляемому интегральной схемой, в памяти которой должен иметься буфер объемом до ±12 с, чтобы корректировать хронометрические погрешности вследствие ударов.
Настоящее изобретение использует в качестве регулятора хода механический осциллятор, так что ему для правильного функционирования не требуется электричества или электроники. Непрерывное движение регулируется самим изотропным осциллятором, а не интегральной схемой.
8 Реализация изотропного гармонического осциллятора
В некоторых рассмотренных вариантах (которые будут также подробно обсуждены далее) изобретение рассматривается как реализация изотропного гармонического осциллятора для использования в качестве регулятора хода. Действительно, чтобы реализовать изотропный гармонический осциллятор как регулятор хода, необходима физическая конструкция, обеспечивающая центральную восстанавливающую силу. Сначала можно отметить, что теория движения массы относительно центральной восстанавливающей силы исходит из того, что результирующее движение лежит в плоскости. Отсюда следует, что, из практических соображений, данная физическая конструкция должна реализовывать планарную изотропию. Следовательно, рассматриваемые далее конструкции будут, в основном, соответствовать планарной изотропии, но не ограничиваться ею, т.е. будет приведен также пример трехмерной изотропии. Планерная изотропия может быть реализована двумя путями: с изотропными пружинами и с поступательными изотропными пружинами.
Вращающиеся изотропные пружины имеют одну степень свободы и вращаются вместе с компонентом, несущим и пружину, и массу. Такая архитектура естественным образом приводит к изотропии. В то время как масса движется по орбите, она вращается вокруг себя с той же угловой скоростью, что и несущий компонент.
Поступательные изотропные пружины имеют две поступательные степени свободы, так что масса не вращается, а поступательно движется по эллиптической орбите вокруг нейтральной точки. Это решает проблему паразитного момента инерции и устраняет теоретическое препятствие для изохронизма.
Вращающиеся изотропные пружины в данном описании не рассматриваются, и термин "изотропная пружина" относится только к поступательным изотропным пружинам.
9 Применение в акселерометрах, хронографах и регуляторах
При добавлении к описанным вариантам изотропной пружины радиального дисплея изобретение позволяет получить полностью механический акселерометр с двумя степенями свободы, пригодный, например, для измерения поперечных нагрузок в пассажирском автотранспорте.
В других приложениях описанные осцилляторы и системы могут быть использованы в качестве регулятора для хронографа, измеряющего доли секунды и требующего дополнительно только мультипликативной системы зубчатых колес с расширенным диапазоном скоростей, например, для достижения частоты 100 Гц, чтобы измерять интервалы порядка 1/100 секунды. Разумеется, возможны и другие измеряемые временные интервалы, так что передаточное отношение системы зубчатых колес может быть подобрано соответствующим образом.
В другом приложении описанный осциллятор может быть использован как регулятор скорости, когда нужно обеспечить только постоянную среднюю скорость в пределах малых интервалов, например, чтобы регулировать часы с боем, музыкальные или наручные часы, а также музыкальные шкатулки. Применение гармонического осциллятора, в отличие от фрикционного регулятора, обеспечивает минимизацию трения и оптимизацию фактора качества, что дает минимизацию нежелательного шума, снижение энергопотребления и, следовательно, сохранение энергии. В часах с боем или в музыкальных часах это приводит к улучшению стабильности музыкального ритма или боя.
Гибкие элементы механизмов предпочтительно изготавливаются из упругого материала, такого как сталь, титановые сплавы, алюминиевые сплавы, бронзовые сплавы, силикон (моно- или поликристаллический), карбид кремния, полимеры или композиты. Массивные части механизмов предпочтительно изготавливаются из материалов с высокой плотностью, таких как сталь, медь, золото, вольфрам или платина. Разумеется, для реализации элементов изобретения применимы и другие эквивалентные материалы, а также смеси названных материалов.
Рассмотренные варианты были приведены только в иллюстративных целях и не должны рассматриваться как вносящие какие-либо ограничения. В рамках изобретения возможны и многие другие варианты, например использующие эквивалентные средства. Кроме того, различные варианты могут комбинироваться желательным образом, с учетом конкретных обстоятельств.
Далее, для осциллятора могут быть найдены и другие приложения, не выходящие за границы изобретения, которое не ограничено несколькими описанными приложениями.
Главные свойства и преимущества некоторых вариантов изобретения
А. 1. Механическая реализация изотропного гармонического осциллятора.
А. 2. Применение изотропных пружин, соответствующих физической реализации планарной центральной линейной восстанавливающей силы (закона Гука).
А. 3. Прецизионный прибор для измерения времени благодаря использованию гармонического осциллятора в качестве регулятора хода.
А. 4. Прибор для измерения времени без спускового механизма, т.е. с повышенной эффективностью и уменьшенной механической сложностью.
А. 5. Механический прибор для измерения времени с непрерывным движением, обеспечивающий повышенную эффективность благодаря устранению прерывистого движения компонентов и обусловленных этим нежелательных ударов и эффектов торможения, а также повторяющихся ускорений элементов передач и спусковых механизмов.
А. 6. Компенсация силы тяжести.
А. 7. Динамическая балансировка линейных ударов.
А. 8. Динамическая балансировка угловых ударов.
А. 9. Повышенная хронометрическая точность благодаря использованию свободного спуска, который освобождает осциллятор от всех механических возмущений на отрезке его колебаний.
А. 10. Новое семейство спусковых механизмов, более простых по сравнению со спусковыми механизмами на основе балансирного колеса, поскольку осциллятор вращается в неизменном направлении.
A. 11. Усовершенствование классического свободного спуска для изотропного осциллятора.
Инновации в некоторых вариантах
B. 1. Изотропный гармонический осциллятор впервые применен как регулятор хода в приборе для измерения времени.
В. 2. Исключение спускового механизма из прибора для измерения времени с гармоническим осциллятором в качестве регулятора хода.
В. 3. Новый механизм, компенсирующий силу тяжести.
В. 4. Новые механизмы для динамической балансировки применительно к линейным и угловым ударам.
В. 5. Новые упрощенные спусковые механизмы.
Суммирование свойств и применений изотропных гармонических осцилляторов согласно изобретению (изотропных пружин)
Примеры свойств
1. Изотропный гармонический осциллятор, минимизирующий дефект изотропии жесткости пружины.
2. Изотропный гармонический осциллятор, минимизирующий дефект изотропии приведенной массы.
3. Изотропный гармонический осциллятор, минимизирующий дефекты изотропии жесткости пружины и приведенной массы.
4. Изотропный осциллятор, минимизирующий дефекты изотропии жесткости пружины и приведенной массы и нечувствительный к линейному ускорению во всех направлениях, в частности нечувствительный к силе тяжести для всех ориентаций механизма.
5. Изотропный гармонический осциллятор, нечувствительный к угловым ускорениям.
6. Изотропный гармонический осциллятор, сочетающий все перечисленные свойства, т.е. минимизирующий дефекты изотропии жесткости пружины и приведенной массы и нечувствительный к линейным и угловым ускорениям.
Применения изобретения
А. 1. Изобретение является физической реализацией центральной линейной восстанавливающей силы (закона Гука).
А. 2. Изобретение обеспечивает физическую реализацию изотропного гармонического осциллятора как регулятора хода в приборе для измерения времени.
А. 3. Изобретение минимизирует отклонение от планарной изотропии.
А. 4. Обеспечиваемые изобретением свободные колебания являются хорошей аппроксимацией эллиптических орбит с нейтральной точкой пружины, являющейся центром эллипса.
А. 5. Обеспечиваемые изобретением свободные колебания имеют высокую степень изохронизма: период осцилляции в высокой степени независим от общей энергии (амплитуды).
А. 6. Изобретение легко согласуется с механизмом передачи внешней энергии, служащей для поддержания общей энергии колебаний относительно постоянной в течение длительных периодов времени.
А. 7. Механизм может быть модифицирован, чтобы обеспечить трехмерную изотропию.
Свойства
N. 1. Изотропный гармонический осциллятор с высокой жесткостью пружины, с изотропией приведенной массы при ее нечувствительности к линейным и угловым ускорениям.
N. 2. Отклонение от идеальной изотропии по меньшей мере на порядок, обычно на два порядка, меньше, чем в известных механизмах.
N. 3. Отклонение от идеальной изотропии впервые достаточно мало для того, чтобы изобретение могло использоваться как часть регулятора хода в точном приборе для измерения времени.
N. 4. Изобретение является первой реализацией гармонического осциллятора, не требующего применения спускового механизма с прерывистым движением для снабжения энергией с целью поддержания колебаний при постоянном уровне энергии.
Источники (содержание которых полностью включено в данное описание посредством ссылки)
[1] Joseph Bertrand, Theoreme relatif au mouvement d'un point attire vers un centre fixe, C.R. Acad. Sci. 77 (1873), 849-853.
[2] Jean-Jacques Born, Rudolf Dinger, Farine, Salto - Un mouvement
Farine, Salto - Un mouvement  a remontage automatique ayant la
a remontage automatique ayant la  d’un mouvement a quartz, Societe Suisse de
d’un mouvement a quartz, Societe Suisse de  Actes de la
Actes de la  d’Etude 1997.
d’Etude 1997.
[3] H. Bouasse, Pendule Spiral Diapason II, Librairie Delagrave, Paris 1920.
[4] Antoine Breguet,  isochrone de M. Yvon Villarceau, La Nature 1876 (premier semestre), 187-190.
isochrone de M. Yvon Villarceau, La Nature 1876 (premier semestre), 187-190.
[5]  Breguet, Brevet d’lnvention 73414, 8 juin 1867, de
Breguet, Brevet d’lnvention 73414, 8 juin 1867, de  I’agriculture, du Commerce et des Travaux publics (France).
I’agriculture, du Commerce et des Travaux publics (France).
[6] George Daniels, Watchmaking, Updated 2011 Edition, Philip Wilson, London 2011.
[7] Leopold Defossez, Les savants du XVIIeme siecle et la mesure du temps, Edition du Journal Suisse d’Horlogerie, Lausanne 1946.
[8] Leopold Defossez, Theorie Generate de I’Horlogerie, Tome Premier, La Chambre suisse d’horlogerie, La Chaux-de-Fonds 1950.
[9] Rupert T. Gould, The Marine Chronometer, Second Edition, The Antique Collector’s Club, Woodbrige, England, 2013.
[10] R.J. Griffiths, William Bond astronomical regulator No. 395, Antiquarian Horology 17 (1987), 137-144.
[11] Jules Haag, Sur le pendule conique, Comptes Rendus de  des Sciences, 1947, 1234-1236.
des Sciences, 1947, 1234-1236.
[12] Jules Haag, Les mouvements vibratoires, Tome second, Presses Universitaires de France, 1955.
[13] K. Josic and R.W. Hall, Planetary Motion and the Duality of Force Laws, SIAM Review 42 (2000), 114-125.
[14] Simon Henein, Conception des guidages flexibles, Presses Polytechniques et Universitaires Romandes, Lausanne 2004.
[16] Christiaan Huygens, Horologium Oscillatorium, Latin with English translation by Ian Bruce, www.17centurvmaths.com/contents/huygenscontents.html.
[17] Derek F. Lawden, Elliptic Functions and Applications, Springer Verlag, New York 2010.
[18] J.C. Maxwell, On Governors, Bulletin of the Royal Society 100 (1868), 270-83. en.wikipedia.org/wiki/File:On_Governors.pdf.
[19] Isaac Newton, The Mathematical Principles of Natural Philosophy, Volume 1, Translated by Andrew Motte 1729, Google eBook, retrieved January 10, 2014.
[20] Niaudet-Breguet, "Application du diapason ‘a I’horlogerie".  de lundi 10
de lundi 10  1866. Comptes Rendus de
1866. Comptes Rendus de  des Sciences 63, 991-992.
des Sciences 63, 991-992.
[21] Derek Roberts, Precision Pendulum Clocks, Schiffer Publishing Ltd., Atglen, PA, 2003.
[22] Seiko Spring Drive official website, www.seikospringdrive.com, retrieved January 10, 2014.
[23] William Thomson, On a new astronomical clock, and a pendulum governor for uniform motion, Proceedings of the Royal Society 17 (1869), 468-470.
[24] Yvon Villarceau, Sur les 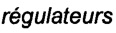 isochrones,
isochrones,  du
du  de Watt, Comptes Rendus de
de Watt, Comptes Rendus de 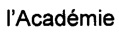 des Sciences, 1872, 1437-1445.
des Sciences, 1872, 1437-1445.
[25] Philip Woodward, My Own Right Time, Oxford University Press 1995.
[26] Awtar, S., Synthesis and analysis of parallel kinematic XY flexure mechanisms. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, 2006.
[27] M. Dinesh, G.K. Ananthasuresh, Micro-mechanical stages with enhanced range, Interna tional Journal of Advances in Engineering Sciences and Applied Mathematics, 2010. [28] L.L. Howell, Compliant Mechanisms, Wiley, 2001.
[29] Yangmin Li, and Qingsong Xu, Design of a New Decoupled XY Flexure Parallel Kinematic Manipulator with Actuator Isolation, IEEE 2008.
[30] Yangmin Li, Jiming Huang, and Hui Tang, A Compliant Parallel XY Micromotion Stage With Complete Kinematic Decoupling, IEEE, 2012.




Изобретение относится к устройствам для измерения времени. Механический изотропный гармонический осциллятор содержит соединение по меньшей мере с двумя степенями свободы, поддерживающее массу, совершающую орбитальное движение относительно неподвижного основания, посредством пружин, обладающих изотропностью и обеспечивающих линейную восстанавливающую силу. Осциллятор может использоваться в приборе для измерения времени, например в наручных часах. 7 н. и 12 з.п. ф-лы, 46 ил.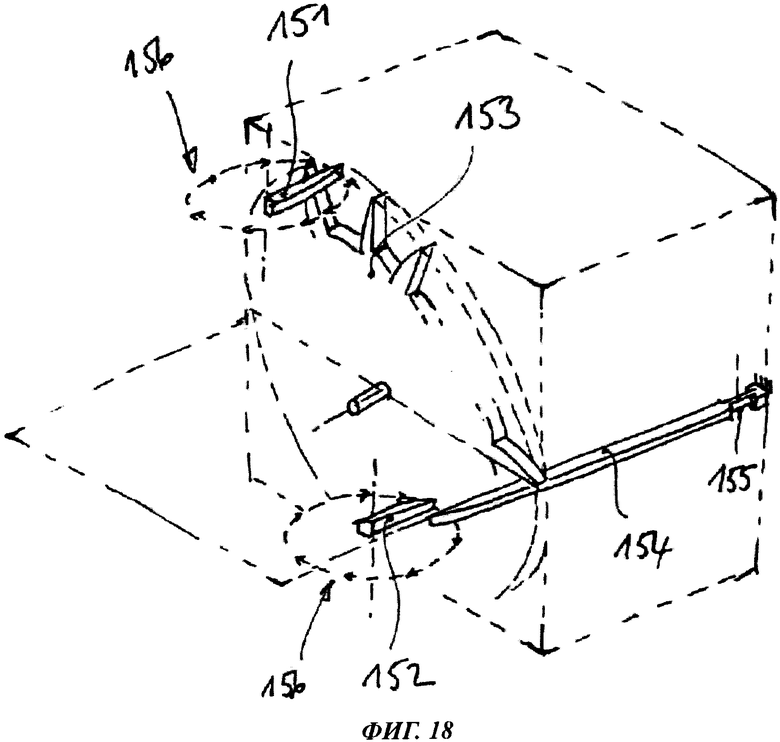
1. Механический изотропный гармонический осциллятор, содержащий соединение по меньшей мере с двумя вращательными степенями свободы, связывающее массу (603, 614, 622, 634, 667, 668, 679, 683, 691, 692, 719, 720, 768, 807), способную совершать орбитальное движение, с неподвижным основанием (601, 611, 620, 630, 664, 676, 685, 700, 715, 760, 800) и содержащее по меньшей мере один упругий элемент (602, 612, 613, 621, 631, 633, 665, 666, 677, 701-703, 716, 761-770, 803-805, 811), обладающий изотропией и способный создавать линейную восстанавливающую силу, при этом указанное соединение выполнено по существу блокирующим третью вращательную степень свободы массы, способной совершать орбитальное движение, относительно неподвижного основания.
2. Осциллятор по п. 1, в котором сформировано соединение с двумя вращательными степенями свободы, обеспечивающее возможность качательного движения указанной массы, в результате которого она перемещается по своей орбите при сохранении фиксированной ориентации.
3. Осциллятор по п. 1 или 2, в котором масса, способная совершать орбитальное движение, содержит единственную массу (603, 614, 622, 634, 768, 807, 910. 935, 965) или более одной массы (667, 668, 679, 683, 691, 692, 719, 720).
4. Осциллятор по любому из пп. 1-3, в котором массе, способной совершать орбитальное движение, придана форма сплошной или полой сферы или гантели с центром тяжести в центре качательного движения.
5. Осциллятор по п. 4, в котором указанной массе придана форма сплошной сферы (910, 935) или полой сферы (965) с центром тяжести в центре качательного движения и с восстанавливающей силой, обеспечиваемой экваториальной или полярной пружиной (916, 927).
6. Осциллятор по любому из предыдущих пунктов, в котором указанный упругий элемент содержит по меньшей мере один гибкий стержень (602) или группу гибких стержней (612, 613, 621, 631, 633, 665, 666, 701-703, 716, 761-770, 803-805, 811).
7. Осциллятор по любому из пп. 1-4, в котором упругий элемент является гибкой мембраной (677).
8. Система для прибора для измерения времени, содержащая осциллятор по любому из пп. 1-6 и механизм для непрерывного снабжения осциллятора механической энергией.
9. Система по п. 8, в которой указанный механизм способен прикладывать к осциллятору или к осцилляторной системе крутящий момент или дискретное усилие.
10. Система по п. 8 или 9, в которой указанный механизм содержит компонент (83) с изменяемым радиусом, способный вращаться на оси (82) относительно неподвижной рамки (81), и в которой призматическое сочленение (84) обеспечивает для конца указанного компонента возможность вращения с изменяемым радиусом.
11. Система по п. 8 или 9, в которой указанный механизм содержит неподвижную рамку (91), несущую ось кулисы (92), к которой приложен поддерживающий крутящий момент М, и кулису (93), прикрепленную к указанной оси (92) и снабженную призматической прорезью (93'), при этом к способной совершать орбитальное движение массе (95) осциллятора или осцилляторной системы прикреплен жесткий палец (94), введенный в указанную прорезь (93').
12. Система по п. 8 или 9, в которой указанный механизм содержит свободный спуск для прерывистой подачи механической энергии к осциллятору.
13. Система по п. 12, в которой свободный спуск содержит два параллельных зубца (151, 152), прикрепленных к орбитальной массе, при этом один зубец (152) выполнен с возможностью смещать упор (154), способный шарнирно поворачиваться на пружине (155) с освобождением спускного колеса (153), а спускное колесо способно сообщать импульс другому зубцу (151), восстанавливая энергию, потерянную осциллятором или осцилляторной системой.
14. Прибор для измерения времени, такой как часы, содержащий в качестве регулятора хода осциллятор или систему согласно любому из предыдущих пунктов.
15. Прибор по п. 14, который представляет собой наручные часы или хронограф.
16. Применение осциллятора согласно любому из пп. 1-7 в качестве регулятора хода в хронографе для измерения долей секунды, требующего дополнительно только мультипликативную систему зубчатых колес с расширенным диапазоном скоростей, например, для достижения частоты 100 Гц с целью обеспечения возможности измерения интервалов порядка 1/100 секунды.
17. Применение системы для прибора для измерения времени согласно любому из пп. 8-12 в качестве регулятора хода в хронографе для измерения долей секунды, требующего дополнительно только мультипликативную систему зубчатых колес с расширенным диапазоном скоростей, например, для достижения частоты 100 Гц с целью обеспечения возможности измерения интервалов порядка 1/100 секунды.
18. Применение осциллятора согласно любому из пп. 1-7 в качестве регулятора скорости для часов с боем или музыкальных и наручных часов, а также музыкальных шкатулок с целью устранения нежелательного шума и снижения энергопотребления, а также повышения стабильности музыкального ритма или боя.
19. Применение системы для прибора для измерения времени согласно любому из пп. 8-12 в качестве регулятора скорости для часов с боем или музыкальных и наручных часов, а также музыкальных шкатулок с целью устранения нежелательного шума и снижения энергопотребления, а также повышения стабильности музыкального ритма или боя.
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЙ | 0 |
|
SU240505A1 |
| Способ регулирования усилий обработки | 1973 |
|
SU481411A1 |
| Устройство для фальцевания деталей одежды | 1974 |
|
SU512757A1 |
| US3318087 A, 09.05.1967 | |||
| US3269106 A, 30.08.1966.. | |||

