(54) УСТРОЙСТВО для ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО
ДВИЖЕНИЯ
Изобретение относится к приборостроению и может быть использовано в качестве исполнительного электромеханического привода.
По основному авт. св. N° 605644 известно устройство для получения вращательного движения, содержащее волновую передачу с деформируемым элементом и электромеханический привод, образованный пьезоэлектрическими преобразователями, pactioложенными симметрично относительно оси передачи, опьртыми одним концом в неподвижное основание, а другим - в деформируемый элемент, а пьезоэлектрические преобразователи выполнены в виде концентрично расположенных втулок, торцы которых последовательно жестко соединены 1.
Недостаток устройства - значительные габариты в радиальном направлении при использовании в пьезолреобразователях как продольного, так и поперечного пьезоэффектов, а также низкая надежность устройства, из-за применения в пакетных пьезопреобразователях больщого количества пьезоэлементов и наличие в их конструкциях клеевых соединений.
Цель изобретения - у.меньшение радиальных габаритов, а также повыщение надежности устройства.
Указанная цель достигается тем, что устройство снабжено опорами, закрепленными на неподвижном основании, и контактирующими одной стороной с пьезоэлектрическими преобразователями, а другой - с деформируемым элементом рычагами, установленными на осях в опорах -с возможностью поворота в плоскости, проходящей через ось передачи.
Опора рычага выполнена составной из диска и кольца, соответственно закрепленных на торцовой и цилиндрической поверхностях внутренней полости неподвижного основания.
Устройство снабжено установленными на рычагах промежуточными телами, контактирующими с пьезоэлектрическими преобразователями.
Промежуточные тела представляют собой подщипники качения, а рычаги подпружинены в плоскости качания.
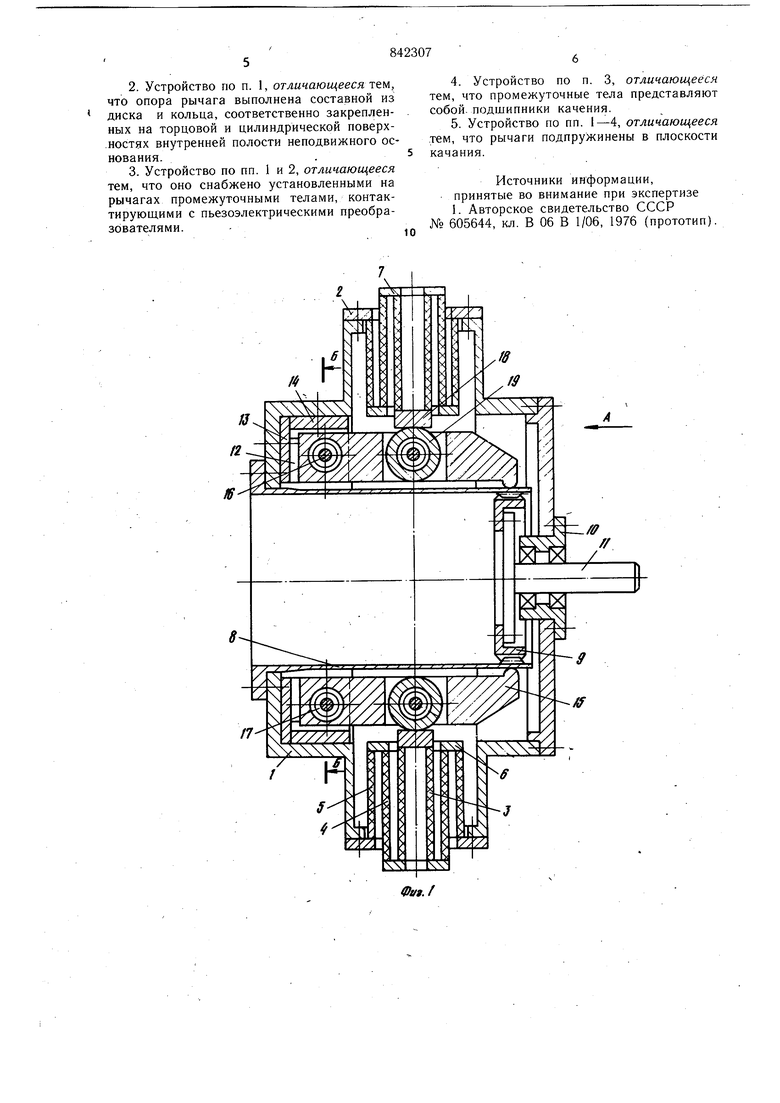
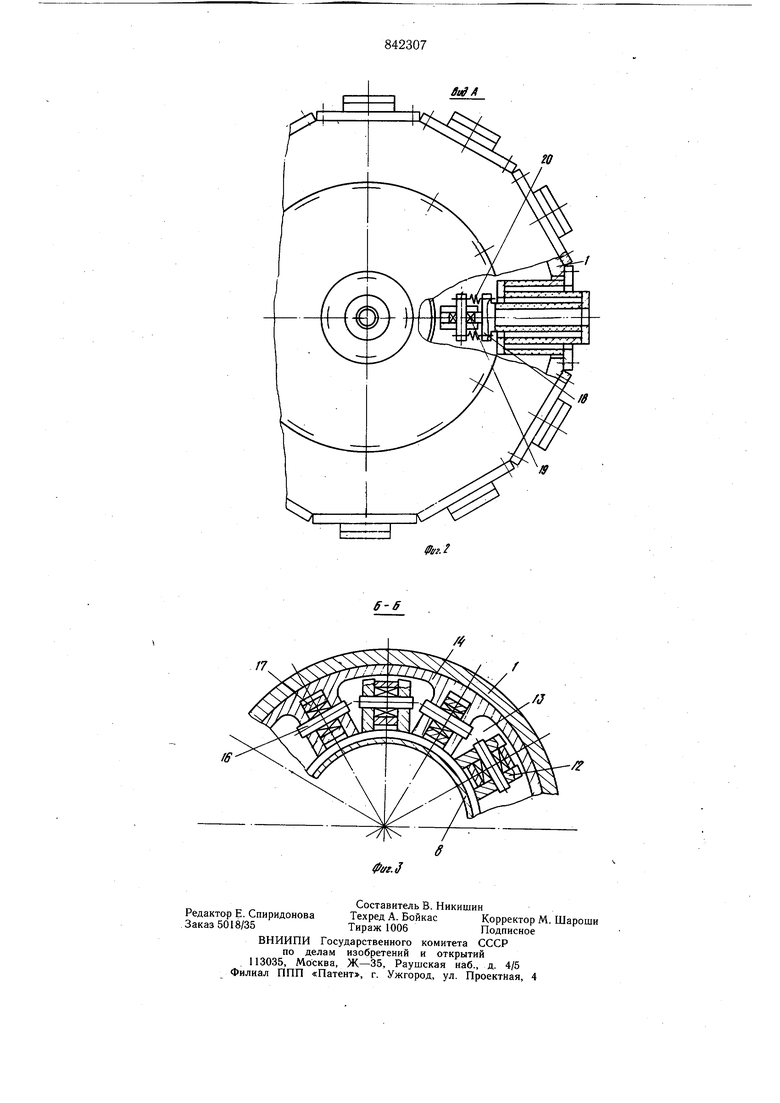
На фиг. 1 изображено устройство, продольный рдзрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Устройство состоит из корпуса (неподвижного основания) 1, на котором установлены в радиальных направлениях равномерно по окружности пьезоэлектрические преобразователи 2, выполненные в виде втулок 3, 4 и 5, торцы которых последовательно жестко соединены при помощи шайб 6 и 7, например, пайкой или клеем ДМ5-65 ОСТ 5.9131-73 с добавлением мелкодисперсного порошка из пьезокерамики. Деформируемый элемент, представляющий собой гибкое зубчатое колесо 8, установлено неподвижно в расточке корпуса 1, и жесткого зубчатог о колеса 9, установленного в подшипниковой опоре 10 выходного вала 11. Устройство содержит опоры 12, выполненные составными из диска 13 и кольца 14, соответственно закрепленных на торцовой и цилиндрической поверхностях внутренней полости корпуса (неподвижного основания) 1. Рычаги 15, установленные на осях 16 в подшипниках
17в опорах 12 с возможностью поворота в плоскости, проходящей через ось передачи, контактируют одной стороной с шайбами
18пьезоэлектрических преобразователей 2, а другой - с деформируемым элементом 8. рычаги 15 контактируют с шайбами 18 через промежуточны тела, представляющие .собой подшипники 19 качения, установленные в рычагах 15 на осях 10. Рычаги 15 подпружинены в плоскости качания с помощью пр.ужин 20.
Устройство работает следующим образом.
С помощью коммутатора на электроды пьезопреобразователя подаются напряжения, благодаря которым линейные размеры преобразователей 2 изменяются (обратный пьезоэффект).
В зависимости от знака разности потенциалов, приложенных к пьезопреобразователям 2, последние испытывают деформацию сжатия или растяжения.
Одновременно подаваемые напряжения на пьезопреобразователи 2, работающие на растяжение и сжатие, обратной полярности.
Предположим, что втулка 3 (внутренняя) испытывает деформацию растяжения, втулка 4 (средняя) - сжатие, и втулка 5 (наружная) - растяжение, тогда свободный конец с шайбой 18 получает перемещение в направлении центральной оси волновой передачи, равное сумме абсолютных линейных деформаций трех втулок 3, 4 и 5.
При последовательном переключении управляющего напряжения с одной на другую пару диаметрально противоположных пьезопреобразователей и посредством воздействия рычагов 15 на гибкое зубчатое колесо 8, образуется волновая деформация гибкого колеса, приводящая к вращению жесткое колесо 9.
Перед запуском устройства щайбы 18 пьезоэлектрических преобразователей 2 и подщипники 19 качения приводятся во взаимодействие.
При этом упоры рычагов 15 должны соприкасаться с наружной поверхностью гибкого колеса 8 в недеформированном состоянии.
При работе устройства линия, соединяющая оси опоры и роликов (линия наклона рычагов), и образующая гибкого колеса в точке соприксоновения упора рычага при максимальной деформации должны быть параллельными., Тогда осевая составляющая силы давления пьезопреобразователя в дан0 ный момент равна нулю, и силовое воздействие на элементы пьезопреобразователя, в том числе и клеевые соединения, отсутствует.
Начальный момент пуска устройства заключается в подаче управляющего напряжения, например, синусоидального, на пьезопреобразователи, и образовании двухволнового зубчатого зацепления.
Устройство работает в нерезонансном, резонансном, шаговом и синхронном режимах.
Синхронный режим управления устройства характеризуется согласованным изменением амплитуды управляющего напряжения, подаваемого на пьезопреобразователи и безударным характером взаимодействия пьезопреобразователей, рычагов и гибкого колеса волновой передачи.
Рычаг устройства конструктивно выполнен с двумя плечами, расположенными по разные стороны относительно вращения рычага, а также расположенными под 0 углом 90°.
В этом случае дополнительно открываются конструктивные возможности уменьшения габаритов в радиальном направлении.
Применение рычажной системы также 5 рационально в устройстве, в котором оба зубчатых колеса волновой передачи выполнены гибкими.
Необходимо отметить возможность выполнения модификации устройств для получения поступательного и винтового движений. Все устройства названных видов движений выполнены в герметичном исполнении.
Формула изобретения
/J
Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 605644, кл. В 06 В 1/06, 1976 (прототип).
го
