2, Устройство по п.1, о т л ичающееся тем, что в неподвижном основании вьшолнены радиальные пазы, а ползун-упор имеет хвостовик с надетыми на него подшипниками, один нз которых взаимодействует с деформируе1 « 1м элементом.
а другой .установлен в радиальных пазах о
3. Устройство по пп. 1 и 2, о тлич ающ.еес я тем. что на ползуне-упоре вьитолнены направляющие выступы,охватывающие взаимодействующий с деформируемым элементом подшипник.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| "Устройство для получения вращательногодВижЕНия | 1979 |
|
SU842307A2 |
| Устройство для получения вращательного движения | 1986 |
|
SU1453101A2 |
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| Прокатная клеть | 1987 |
|
SU1507466A1 |
| ПРЕСС С РЕВОЛЬВЕРНОЙ ГОЛОВКОЙ | 1970 |
|
SU273628A1 |
| Привод перемещения подвижного узла | 1980 |
|
SU942936A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
i. УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ по авт.св.. № 842307, отличающееся тем, что, с целью повьипения точности регулирования, надежности и долгот вечности устройства, оно снабжено установленным на рычагах регулирующим йрйспособлепием, выполненньм в виде системы двух передач винт-гайка с резьбами разных шагов, гайка одной из которых представляет собой ползун-упор, установленный с воз- мо}кностью перемещения по напрявляющей плоскости рычага в направлении оси деформируемого элемента, а гайка дру; гой выполнена в виде .ввернутой в рычаг, и закрепленной неподвижно встав.лда. (Л
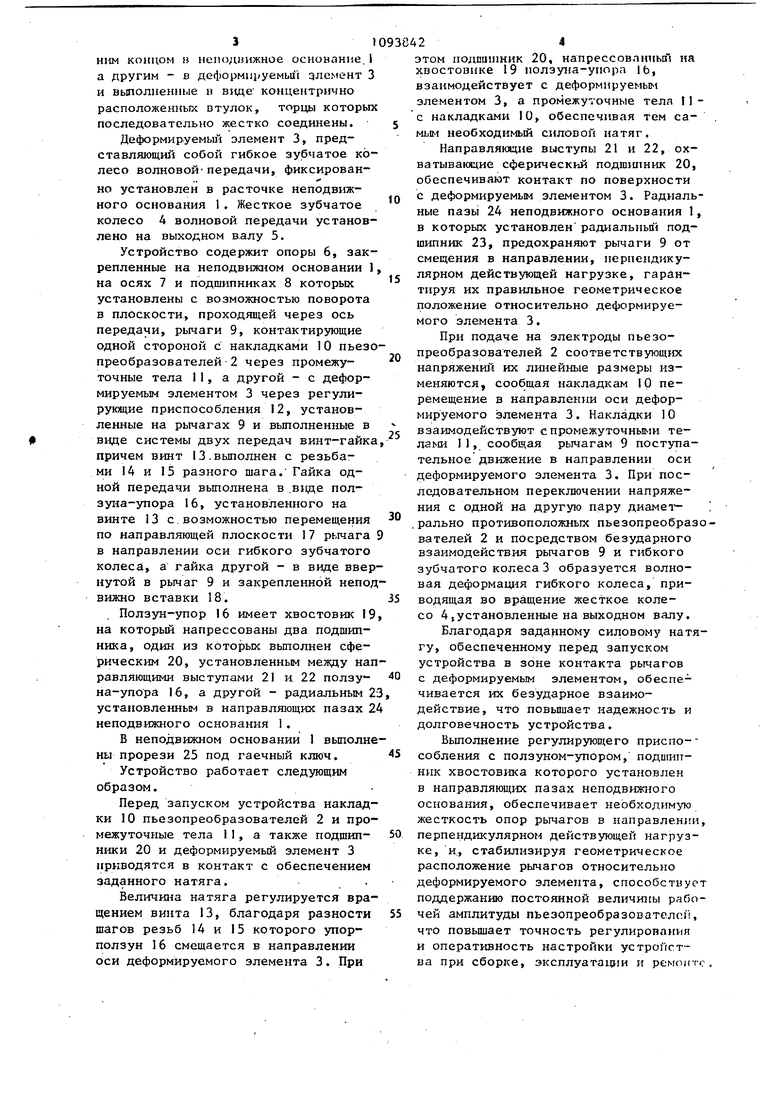
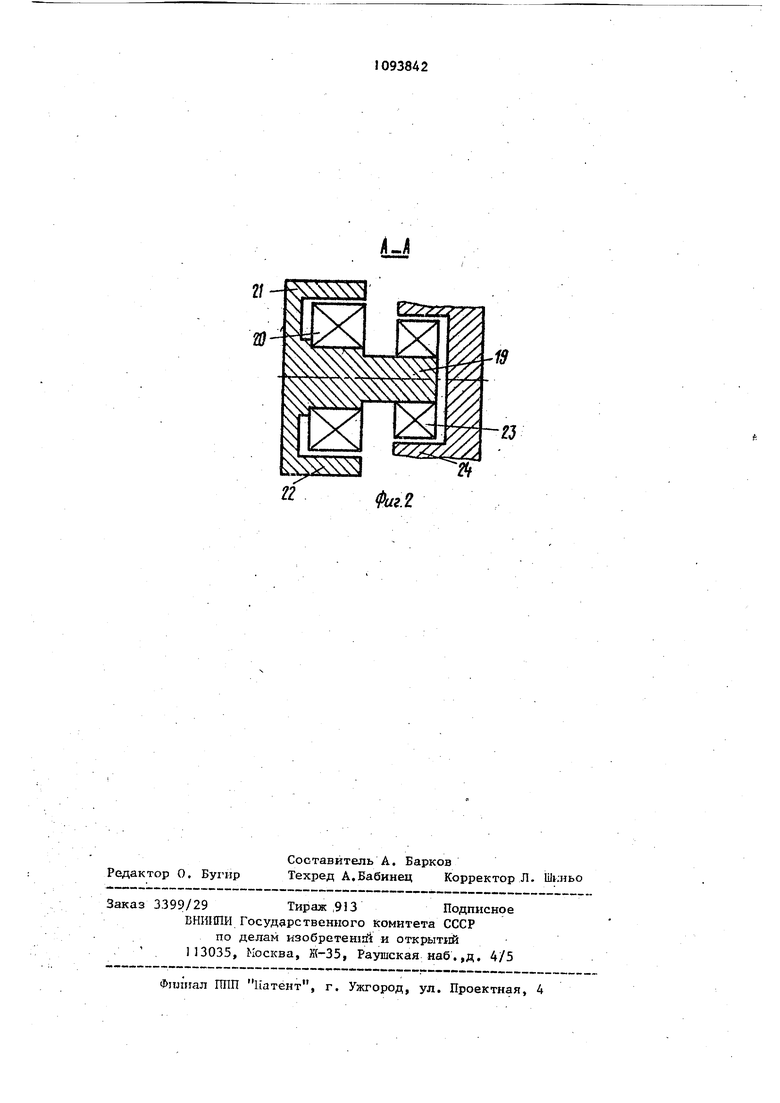
Изобретение относится к приборостроению и может быть использовано в качестве исполнительного электромеханического привода. По основному авт.св. № 842307 из вестно устройство для получения вра щательного движения, содержащее вол новую передачу с деформируемым элементом, электромеханический привод, образованный пьезоэлектрическими преобразователями оасположенными симметрично относительно оси передачи, опертьми одним концом в непод вижное основание, а другим - в деформируемый элемент и вьтолненными в виде концентрично расположенных втулок, концы которых последователь жестко соединены, опоры, закрепленн на неподвижном основании и контакти рующие одной стороной с пьезоэлектрическими преобразователями, а другой - с деформируемым элементом рачагами, установленными на осях в опорах с возможностью поворота в плоскости, проходкщей через ось пе редачи 1 . Недостатки указанного устройства заключаются в невозможности обеспечения безударного взаимодействия ры чагов с деформируемым элементом вследствие дискретности прокладок, которыми (в этом случае} осуществля ется регулирование, в неудовлетворительной регулируемости конструкции при сборке, эксплуатации и ремонте, обусловленной используемые методом регулирования, а также низкой жесткостью рычагов в направлении перпендикулярном действующей нагрузке, что приводит к смещению упора рьршга в окружном направлении относительно деформируемого элемента, на руп№Н1 координации рычагов 1их геометрического положения) относительно деформируемого элемента и, как следствие, к уменьшению рабочей амплитуды пьезоэлектрических преобразователей. Цель изобретения - повышение точности регулирования, надежности и долговечности устройства для получения вращательного движения. Указанная цель достигается тем, что устройство для получения вращательного движения снабжено установленным На рычагах регулирующим приспособлением, выполненным в виде системы двух передач винт-гайка с резьбами разных шагов, гайка одной из которых представляет собой ползун-упор, установленный с возможностью перемещения по направляющей плоскости рычага в направлении оси деформируемого элемента,а гайка другой выполнена в виде ввернутой в рычаг и закрепленной неподвижно вставки. Кроме того, в неподвижном основании вьшолнены радиальные пазы, а ползун-упор имеет хвостовик с надетыми на него подшипниками, одз-ш из которых взаимодействует с деформируемым элементом, а другой установлен в радиальных пазах. При этом на ползуне-упоре выполнены направляющие выступы, охватывающие взаимодействующий с деформируемым элементом подшипник. На фиг.1 изображено предлагаемое устройство, продольньш разрез; на фиг.2 - разрез А-А на фиг.1. Устройство состоит из 11еподвюкного основания 1, на котором установлены равномерно по окружности пьезоэлектрические пьезогфеобразователи 2, бразующие электромеханический приод и расположенные симметрично отосительно оси передачи, опертые од ним концом в непод)знжное оснонанио. 1 а другим - в деформируемы длемент 3 и выюлиенпые а ввде концентрично расположенных втулок, торцы которы последовательно жестко соединены. Деформируемый элемент 3, представляющий собой гибкое зубчатое ко лесо волновой-передачи, фиксированно установлен в расточке неподвижного основания 1. Жесткое зубчатое колесо 4 волновой передачи установлено на выходном в.алу 5. Устройство содержит опоры 6, зак репленные на неподвижном основании 1 на осях 7 и подшипниках 8 которых установлены с возможностью поворота в плоскости, проходящей через ось передачи, рычаги 9, контактирующие одной стороной с накладками 10 пьез преобразователей2 через промежуточные тела II, а другой - с деформируемым элементом 3 через регулирующие приспособления 12, установленные на рычагах 9 и выполненные в виде системы двух передач винт-гайк причем винт 13.выполнен с резьбами 14 и 15 разного шага. Гайка одной передачи вьтолнена в .В1ще ползуна-упора 16, установленного на винте 13 с.возможностью перемещения по направляющей плоскости 17 рычага в направлении оси гибкого зубчатого колеса, а гайка другой - в виде ввер нутой в рычаг 9 и закрепленной непо вижно вставки 18. Ползун-упор 16 имеет хвостовик 19 на который напрессованы два подшипника, один из которых выполнен сферическим 20, установленньм между на равляющими выступами 21 и 22 ползуна-упора 16, а другой - радиальным 2 установленным в направляющих пазах 2 неподвижного основания 1. В неподвижном основании 1 вьшолн ны прорези 25 под гаечный ключ. Устройство работает следующим образом. Перед запуском устройства наклад ки 10 пьезопреобразователей 2 и про межуточные тела 11, а также подтипНИКИ 20 и деформируемый элемент 3 приводятся в контакт с обеспечением заданного натяга.. Величина натяга регулируется вра цением винта 13, благодаря разности шагов резьб 14 и 15 которого упорползун 16 смещается в направлении оси деформируемого элемента 3. При этом подпшпник 20, напрессовлнньш на хвостовике 19 ползуна-упора 1Ь, взаимодействует с деформируемым элементом 3, а промежуточные тела 11с накладками 10, обеспечивая тем самым необходимый силовой натяг. Направляющие выступы 21 и 22, охватывающие сферический подшипник 20, обеспечивают контакт по поверхности с деформируемым элементом 3. Радиальные пазы 24 неподвижного основания 1, в которых установлен радиальиьп подшипник 23, предохраняют рычаги 9 от смещения в направлении, перпендикулярном действующей нагрузке, гарантируя их правильное геометрическое положение относительно деформируемого элемента 3. При подаче на электроды пьезопреобразователей 2 соответствующих напряжений их линейные размеры изменяются, сообщая накладкам 10 перемещение в направлении оси деформируемого элемента 3. Накладки 10 взаимодействуют с промежуточными телами 11, сообщая рычагам 9 поступательное движение в направлении оси деформируемого элемента 3. При последовательном переключении напряжения с одной на другую пару диамет- , рально противоположньпс пьезопреобразователей 2 и посредством безударного взаимодействия рычагов 9 и гибкого зубчатого колеса 3 образуется волновая деформация гибкого колеса, приводящая во вращение жесткое колесо 4,установленные на выходном валу. Благодаря заданному силовому натягу, обеспеченному перед запуском устройства в зоне контакта рычагов с деформируемым элементом, обеспечивается их безударное взаимодействие, что повышает надежность и долговечность устройства. Выполнение регулирующего приспо-собления с ползуном-упором, подшипник хвостовика которого установлен в направляющ сс пазах неподвижного основания, обеспечивает необходимую жесткость опор рычагов в направлении, перпендикулярном действующей нагрузке, и, стабилизируя геометрическое расположение рычагов относительно деформируемого элемента, способствует поддержанию постоянной величины рабочей амплитуды пьезопреобразоватсло, что повьш1ает точность регулирования и оперативность настройки устройства при сборке, эксплуатации л ремонте.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
