Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к способу управления отображением и устройству управления отображением.
Уровень техники
[0002]
В уровне техники раскрыто устройство управления отображением, которое отображает информацию, подлежащую визуальному распознаванию водителем на дисплее (например, Патентная литература 1). Патентная литература 1 раскрывает сведения об отображении на устройстве отображения на лобовом стекле наложенного отображаемого изображения, показывающего маршрут движения, когда системой управления выполняется смена полосы движения . Кроме того, в Патентной литературе 1 раскрыто, что ход смены полосы движения указывается в маршруте движения, показанном на наложенном отображаемом изображении.
Список цитированных источников
Патентная литература
[0003]
Патентная литература 1 Публикация нерассмотренной заявки на патент Японии № 2015-11458
Раскрытие изобретения
[0004]
Если выполняется сложное автоматическое управление, такое как смена полосы движения, управление, выполняемое системой управления, включает в себя множество процессов. Следовательно, от водителя требуется способность воспринимать то, в каком из процессов управления находится водитель. Согласно способу, раскрытому в Патентной литературе 1, можно воспринимать изменение положения движения транспортного средства-носителя, но невозможно воспринимать то, в каком из процессов управления находится водитель.
[0005]
Настоящее изобретение создано с учетом вышеописанных проблем, и задача настоящего изобретения состоит в создании способа управления отображением и устройства управления отображением, в которых водитель может воспринимать процесс управления, выполняемый системой управления.
[0006]
В способе управления отображением согласно одному аспекту настоящего изобретения, если система управления предлагает водителю транспортного средства-носителя смену полосы движения, на дисплее отображается изображение, показывающее стрелку, а способ отображения для изображения, показывающего стрелку, переключается в зависимости от множества процессов управления, выполняемых системой управления.
Полезные эффекты изобретения
[0007]
Согласно настоящему изобретению водитель может воспринимать состояние управления, выполняемого системой управления, для смены полосы движения.
Краткое описание чертежей
[0008]
[ФИГ. 1] Фиг. 1 - блок-схема для демонстрации системы управления, применяемой с устройством управления отображением согласно настоящему варианту осуществления.
[ФИГ. 2] Фиг. 2 - пояснительная схема для схематичной демонстрации ситуации перед местом водителя транспортного средства-носителя.
[ФИГ. 3] Фиг. 3 - пояснительная схема для пояснения первого информационного изображения и второго информационного изображения.
[ФИГ. 4] Фиг. 4 - пояснительная схема для демонстрации серии движений от третьей полосы движения до пути выезда транспортного средства-носителя в ситуации, когда вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5A] Фиг. 5A - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5B] Фиг. 5B - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5C] Фиг. 5C - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5D] Фиг. 5D - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5E] Фиг. 5E - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5F] Фиг. 5F - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5G] Фиг. 5G - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5H] Фиг. 5H - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 5I] Фиг. 5I - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если вдоль маршрута выполняется автоматическая смена полосы движения.
[ФИГ. 6] Фиг. 6 - пояснительная схема для демонстрации серии движений от первой полосы движения ко второй полосе движения транспортного средства-носителя в ситуации, когда выполняется автоматическая смена полосы движения, предложенная водителем.
[ФИГ. 7A] Фиг. 7A - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если выполняется автоматическая смена полосы движения, предложенная водителем.
[ФИГ. 7B] Фиг. 7B - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если выполняется автоматическая смена полосы движения, предложенная водителем.
[ФИГ. 7C] Фиг. 7C - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения, отображаемого, если выполняется автоматическая смена полосы движения, предложенная водителем.
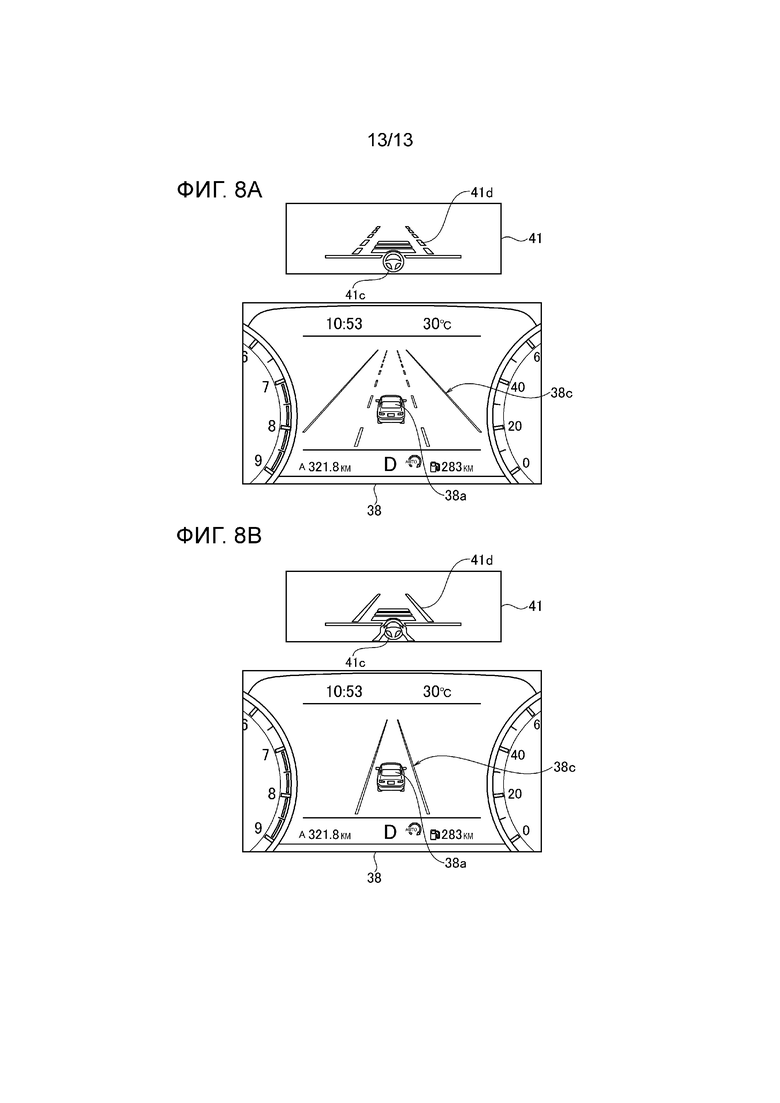
[ФИГ. 8A] Фиг. 8A - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения.
[ФИГ. 8B] Фиг. 8B - пояснительная схема для демонстрации примера первого информационного изображения и второго информационного изображения.
Осуществление изобретения
[0009]
Вариант осуществления настоящего изобретения будет описан ниже с обращением к чертежам. На чертежах одинаковые части обозначены одинаковыми ссылочными позициями, и их описание не приводится.
[0010]
Устройство управления отображением согласно настоящему варианту осуществления будет описано с применением устройства управления отображением к системе управления (системе управления транспортным средством). Система управления управляет поведением транспортного средства-носителя для выполнения автоматического управления. Автоматическое управление означает, например, состояние, в котором управление по меньшей мере одним из исполнительных механизмов, таких как тормоз, акселератор и рулевое управление, осуществляется без каких-либо действий со стороны пользователя. Следовательно, другие исполнительные механизмы могут приводиться в действие посредством действий пользователя. Автоматическое управление может представлять собой состояние, в котором выполняется любое управление, такое как управление ускорением/замедлением и управление боковым положением. Кроме того, в настоящем варианте осуществления ручное управление означает, например, состояние, в котором пользователь приводит в действие тормоз, акселератор и рулевое управление. Транспортное средство-носитель может иметь возможность переключения между автоматическим управлением и ручным управлением.
[0011]
Примером автоматического управления является автоматическая смена полосы движения. Автоматическая смена полосы движения означает, что система управления управляет поведением транспортного средства-носителя таким образом, что транспортное средство-носитель меняет полосу движения с полосы движения транспортного средства-носителя, по которой движется транспортное средство-носитель, на любую из правой или левой смежных полос движения, смежных с полосой движения транспортного средства-носителя.
[0012]
Конфигурация системы управления будет описана со ссылкой на фиг. 1 и 2. Система управления включает в себя контроллер 10, устройство 20 оценки положения транспортного средства-носителя, устройство 21 получения карты, устройство 22 обнаружения информации об окружении, датчик 23 скорости транспортного средства, переключатель 24 рулевого управления, датчик 25 касания и переключатель 26 указателей поворота. Кроме того, система управления включает в себя исполнительный механизм 30 рулевого управления, исполнительный механизм 31 педали акселератора и исполнительный механизм 32 тормоза. Кроме того, система управления включает в себя приборный дисплей 35 и проекционный дисплей 40.
[0013]
Внутри транспортного средства-носителя, в котором применяется система управления, рулевое управление 1 расположено впереди водителя, а приборная панель 3 расположена впереди рулевого управления 1. Приборная панель 3 снабжена измерительным блоком 5 для отображения водителю показаний приборов транспортного средства-носителя. Перед приборной панелью 3 расположено лобовое стекло 4.
[0014]
Контроллер 10 представляет собой микрокомпьютер общего назначения, включающий в себя CPU (центральный процессор), память и блок ввода/вывода. На микрокомпьютере установлена компьютерная программа (программа управления отображением и программа управления), которая побуждает микрокомпьютер функционировать как устройство управления отображением и система управления. Выполняя компьютерную программу, микрокомпьютер функционирует как множество схем обработки информации в системе управления. В настоящем варианте осуществления показан пример, в котором программное обеспечение реализует множество схем обработки информации в системе управления. Однако также возможно выполнение схем обработки информации путём подготовки специализированного аппаратного обеспечения для выполнения каждого информационного процесса, описанного ниже. Кроме того, множество схем обработки информации может состоять из отдельных аппаратных средств. Подробности множества схем обработки информации контроллера 10 будут описаны ниже.
[0015]
Устройство 20 оценки положения транспортного средства-носителя измеряет информацию о положении транспортного средства-носителя, используя такой метод оценки положения, как GPS (глобальная система определения местоположения) и одометрия. Устройство 20 оценки положения транспортного средства-носителя измеряет абсолютное положение транспортного средства-носителя, то есть положение транспортного средства-носителя относительно заданной опорной точки, скорость транспортного средства, ускорение, угол рулевого управления и ориентацию транспортного средства-носителя, используя различные типы датчиков и тому подобное. Устройство 20 оценки положения транспортного средства-носителя включает в себя датчик для определения поведения транспортного средства-носителя, такой как приемник GPS, инерциальное навигационное оборудование, датчики, предусмотренные на педали тормоза и педали акселератора, датчик скорости вращения колеса и датчик скорости рыскания, лазерный радар, камеру и тому подобное. Устройство 20 оценки положения транспортного средства-носителя выводит информацию об измеренном положении ведущего транспортного средства в контроллер 10.
[0016]
Устройство 21 получения карты получает картографическую информацию, показывающую структуру дороги, по которой движется транспортное средство-носитель. Картографическая информация, получаемая устройством 21 получения карты, включает в себя информацию о структуре дороги, такую как абсолютное положение на каждой полосе движения, взаимосвязь в отношении того, как соединяются полосы движения, и взаимосвязь в отношении взаимного расположения, правил дорожного движения, дорожных знаков и тому подобного. Устройство 21 получения карты может иметь картографическую базу данных, сохраняющую картографическую информацию, или, в качестве альтернативы, может получать картографическую информацию с внешнего сервера картографических данных посредством облачных вычислений. Кроме того, устройство 21 получения карты может получать картографическую информацию, используя связь между транспортными средствами или связь между транспортными средствами и дорожной инфраструктурой. Устройство 21 получения карты выводит полученную картографическую информацию в контроллер 10.
[0017]
Устройство 22 обнаружения информации об окружении включает в себя множество различных типов датчиков обнаружения объектов, установленных на транспортном средстве-носителе. Датчики обнаружения объектов представляют собой, например, лазерные дальномеры, лазерные радары, радары миллиметрового диапазона, камеры и тому подобное. Устройство 22 обнаружения информации об окружении обнаруживает объект в окружении транспортного средства-носителя с помощью датчиков обнаружения объектов. Устройство 22 обнаружения информации об окружении обнаруживает движущиеся объекты, включая другое транспортное средство, мотоцикл, велосипед и пешехода, и неподвижные объекты, включая припаркованное транспортное средство. Например, устройство 22 обнаружения информации об окружении определяет положения, ориентацию (углы рыскания), размеры, скорость, ускорения, рывки, замедления и скорости рыскания движущегося объекта и неподвижного объекта относительно транспортного средства-носителя. Устройство 22 обнаружения информации об окружении может получать информацию об окружении, используя связь между транспортными средствами или связь между транспортным средством и дорожной инфраструктурой. Устройство 22 обнаружения информации об окружении выводит обнаруженную информацию на контроллер 10.
[0018]
Датчик 23 скорости транспортного средства обнаруживает скорость транспортного средства для транспортного средства-носителя. Датчик 23 скорости транспортного средства выводит обнаруженную скорость транспортного средства для транспортного средства-носителя на контроллер 10.
[0019]
Переключатель 24 рулевого управления выдает управляющий сигнал в соответствии с операцией водителя. Переключатель 24 рулевого управления предусмотрен на рулевом управлении 1. Переключатель 24 рулевого управления выдает на контроллер 10 управляющий сигнал в соответствии с операцией, выполняемой водителем.
[0020]
Датчик 25 касания предусмотрен на рулевом управлении 1 и обнаруживает, что руки водителя коснулись рулевого управления 1. В качестве датчика 25 касания может использоваться датчик емкостного типа для обнаружения изменения емкости. Если руки водителя касаются рулевого управления 1, датчик 25 касания выдает заданный сигнал обнаружения на контроллер 10.
[0021]
Переключатель 26 указателя поворота выдает сигнал приведения в действие для приведения в действие указателя 34 поворота (указателя направления) и приводится в действие водителем. После приведения в действие водителем переключатель 26 указателя поворота выдает сигнал приведения в действие указателя 34 поворота на контроллер 10.
[0022]
Исполнительный механизм 30 рулевого управления управляет углом рулевого управления для рулевого управления 1. Контроллер 10 управляет исполнительным механизмом 30 рулевого управления.
[0023]
Исполнительный механизм 31 педали акселератора управляет величиной нажатия педали акселератора. Контроллер 10 управляет исполнительным механизмом 31 педали акселератора.
[0024]
Исполнительный механизм 32 тормоза управляет величиной нажатия педали тормоза. Контроллер 10 управляет исполнительным механизмом 32 тормоза.
[0025]
Приборный дисплей 35 расположен на приборном блоке 5. Приборный дисплей 35 отображает заданное изображение таким образом, что водитель может визуально распознавать изображение. Водитель может распознавать различную информацию по изображению, отображаемому на приборном дисплее 35. Приборный дисплей 35 выполнен, например, в виде жидкокристаллической панели. Изображение, отображаемое на приборном дисплее 35, управляется контроллером 10.
[0026]
Приборный дисплей 35 отображает изображение, показывающее приборы транспортного средства-носителя. Изображение, показывающее приборы, включает в себя изображение 36 тахометра, показывающее тахометр, и изображение 37 спидометра, показывающее спидометр. Изображение 36 тахометра отображается в левой области из всей области приборного дисплея 35. Изображение 37 спидометра отображается в правой области из всей области приборного дисплея 35.
[0027]
Приборный дисплей 35 измерителя отображает второе информационное изображение 38, показывающее информацию, сообщаемую водителю системой управления. Второе информационное изображение 38 отображается в центральной области из всей области приборного дисплея 35. То есть второе информационное изображение 38 отображается в промежутке между изображением 36 тахометра и изображением 37 спидометра.
[0028]
Тахометр и спидометр могут быть образованы аналоговыми приборами, и приборный дисплей 35 может отображать только второе информационное изображение 38.
[0029]
Проекционный дисплей 40 расположен на приборной панели 3. Проекционный дисплей 40 отображает заданное изображение таким образом, что водитель может визуально распознавать изображение посредством удаленного отображения с использованием виртуального изображения. Оптическое излучение отображения, излучаемое проекционным дисплеем 40, проецируется на лобовое стекло 4 через отверстие (не показано), предусмотренное в приборной панели 3. Оптическое излучение отображения отражается лобовым стеклом 4 и достигает точки обзора водителя. Это побуждает водителя визуально распознавать виртуальное изображение на внешней стороне лобового стекла 4. Таким образом, проекционный дисплей 40 излучает изображение в направлении лобового стекла 4 и отображает виртуальное изображение, полученное посредством излучаемого изображения, таким образом, что виртуальное изображение накладывается на ситуацию впереди транспортного средства-носителя.
[0030]
Проекционный дисплей 40 отображает первое информационное изображение 41, показывающее информацию, сообщаемую водителю системой управления. Водитель может одновременно визуально распознавать первое информационное изображение 41, отображаемое на проекционном дисплее 40, и ситуацию впереди транспортного средства-носителя, наблюдаемую через лобовое стекло 4.
[0031]
Обращаясь к Фиг. 3, будет описано первое информационное изображение 41, отображаемое на проекционном дисплее 40, и второе информационное изображение 38, отображаемое на приборном дисплее 35.
[0032]
Первое информационное изображение 41 состоит главным образом из пиктограммы 41a движущегося впереди транспортного средства, первой строки 41b символов, пиктограммы 41c отображения режима, первой пиктограммы 41d маркера полосы движения и пиктограммы 41e стрелки.
[0033]
Пиктограмма 41a движущегося впереди транспортного средства представляет собой фигуру, показывающую движущееся впереди транспортное средство, которое движется по той же полосе движения, что и транспортное средство-носитель.
[0034]
Первая строка 41b символов включает в себя один или более символов, таких как символы хираганы, китайские символы, числа и символы, и представляет собой, например, предложение. Кроме того, первая строка 41b символов может включать в себя эмодзи (пиктограмму), которая играет ту же роль, что и символ.
[0035]
Первая строка 41b символов указывает содержимое, сообщаемое водителю системой управления. Содержимое первой строки 41b символов может быть содержимым запроса от системы управления, например инструкцией водителю по выполнению операции для выполнения автоматической смены полосы движения, или тому подобным. Кроме того, содержимое первой строки 41b символов может быть управляющим содержимым в отношении того, что желает выполнить система управления, например автоматической смены полосы движения, которая должна быть выполнена. То есть система управления использует первую строку 41b символов для сообщения водителю запроса от системы управления или о том, что желает выполнить система управления. Первая строка 41b символов имеет такую же взаимосвязь, что и часть второй строки 38b символов, которая будет описана позже.
[0036]
Первая строка 41b символов расположена над пиктограммой 41a движущегося впереди транспортного средства. Более конкретно, первая строка 41b символов расположена в самом верхнем положении из положений элементов, образующих первое информационное изображение 41.
[0037]
Пиктограмма 41c отображения режима представляет собой фигуру, указывающую, является ли режим автономным или ручным режимом. Автономный режим представляет собой режим (первый режим), в котором водитель может освободить руки от рулевого управления 1 во время автоматического управления. С другой стороны, ручной режим представляет собой режим (второй режим), в котором водителю необходимо слегка прикасаться руками к рулевому управлению 1 во время автоматического управления. Пиктограмма 41c отображения режима имеет два вида фигур: первую фигуру рулевого управления и вторую фигуру рулевого управления. Первая фигура рулевого управления показывает только рулевое управление, а вторая фигура рулевого управления показывает рулевое управление и руки водителя, слегка касающиеся рулевого управления. Первая фигура рулевого управления используется, если текущий режим является автономным режимом. Вторая фигура рулевого управления используется, если текущий режим является ручным режимом. Первая фигура рулевого управления отображается, например, синим цветом, а вторая фигура рулевого управления отображается, например, зеленым цветом (только часть рулевого управления).
[0038]
Первая пиктограмма 41d маркера полосы движения представляет собой фигуру, показывающую левый и правый маркеры полосы движения, указывающие границы полосы движения для транспортного средства-носителя. Левый маркер полосы движения, указываемый в первой пиктограмме 41d маркера полосы движения, указывает границу между полосой движения транспортного средства-носителя и смежной полосой движения или обочиной дороги, смежной с левой стороной полосы движения транспортного средства-носителя. Аналогичным образом, правый маркер полосы движения, указываемый в первой пиктограмме 41d маркера полосы движения, указывает границу между полосой движения транспортного средства-носителя и смежной полосой движения или обочиной дороги, смежной с правой стороной полосы движения транспортного средства-носителя.
[0039]
Пиктограмма 41e стрелки представляет собой стрелку для указания на автоматическую смену полосы движения. Пиктограмма 41e стрелки имеет форму, которая изгибается посередине от стороны основания стрелки (нижняя сторона фигуры) к стороне конца стрелки (верхняя сторона фигуры). Кроме того, пиктограмма 41e стрелки проходит от полосы движения транспортного средства-носителя к смежной полосе движения через первую пиктограмму 41d маркера полосы движения. То есть пиктограмма 41e стрелки схематично показывает состояние, в котором транспортное средство-носитель выполняет смену полосы движения посредством автоматической смены полосы движения, и управляет автоматической сменой полосы движения.
[0040]
Первое информационное изображение 41 показывает состояние движения транспортного средства впереди транспортного средства-носителя посредством пиктограммы 41a движущегося впереди транспортного средства и первой пиктограммы 41d маркера полосы движения. Первое информационное изображение 41 формируется таким образом, чтобы представлять состояние движения транспортного средства впереди транспортного средства-носителя, когда водитель смотрит вперед.
[0041]
На первом информационном изображении 41 состояние движения транспортного средства впереди транспортного средства-носителя показано двухмерно. Это связано с тем, что первое информационное изображение 41 отображается на проекционном дисплее 40. То есть при использовании двухмерного представления количество информации ограничено, и видимость первого информационного изображения 41 улучшается.
[0042]
Первое информационное изображение 41 формируется в заданное время, и каждый раз, когда формируется новое первое информационное изображение 41, первое информационное изображение 41, отображаемое на проекционном дисплее 40, обновляется.
[0043]
Первое информационное изображение 41 не обязательно должно всегда включать в себя все из пиктограммы 41a движущегося впереди транспортного средства, первой строки 41b символов, пиктограммы 41c отображения режима, первой пиктограммы 41d маркера полосы движения и пиктограммы 41e стрелки. Первое информационное изображение 41 может включать в себя часть или все из пиктограммы 41a движущегося впереди транспортного средства, первой строки 41b символов, пиктограммы 41c отображения режима, первой пиктограммы 41d маркера полосы движения и пиктограммы 41e стрелки.
[0044]
Реальное состояние движения фактически движущегося транспортного средства-носителя отражается в состоянии движения транспортного средства впереди транспортного средства-носителя, показанного на первом информационном изображении 41. Таким образом, если движущееся впереди транспортное средство фактически отсутствует, первое информационное изображение 41 не включает в себя пиктограмму 41a движущегося впереди транспортного средства.
[0045]
Управляющее содержимое от системы управления отражается в первой строке 41b символов и пиктограмме 41e стрелки. То есть, если нет запроса от системы управления, первое информационное изображение 41 не включает в себя первую строку 41b символов и пиктограмму 41e стрелки.
[0046]
Второе информационное изображение 38 состоит в основном из пиктограммы 38a транспортного средства-носителя, второй строки 38b символов, второй пиктограммы 38c маркера полосы движения и пиктограммы 38d окружающих транспортных средств.
[0047]
Пиктограмма 38a транспортного средства-носителя представляет собой фигуру, обозначающую транспортное средство-носитель.
[0048]
Вторая строка 38b символов включает в себя один или более символов, таких как символы хираганы, китайские символы, числа и символы, и представляет собой, например, предложение. Кроме того, вторая строка 38b символов может включать в себя эмодзи (пиктограмму), которая играет ту же роль, что и символ.
[0049]
Подобно первой строке 41b символов, вторая строка 38b символов указывает содержимое, сообщаемое водителю системой управления. В частности, вторая строка 38b символов включает в себя первую строку 41b символов и другую строку символов (третью строку символов). Содержимое третьей строки символов представляет собой причину сообщения первой строки 41b символов. То есть система управления использует вторую строку 38b символов для сообщения водителю запроса от системы управления или о том, что желает выполнить система управления, и о причине этого. Вторая строка 38b символов содержит больший объем информации, чем первая строка 41b символов, поскольку вторая строка 38b символов включает в себя третью строку символов в дополнение к первой строке 41b символов.
[0050]
Таким образом, вторая строка 38b символов включает в себя первую строку 41b символов. Включение первой строки 41b символов во вторую строку 38b символов не означает, что элемент (первая строка 41b символов), отображаемый на первом информационном изображении 41, рассматривается как часть второй строки 38b символов. Вместо вышеупомянутого, упомянутое включение означает, что вторая строка 38b символов включает в себя строку символов, в которой содержится такая же строка из символов, как первая строка 41b символов. Однако вторая строка 38b символов, описанная выше, является лишь примером и может состоять из любых символов, не ограничиваясь такими условиями.
[0051]
Вторая строка 38b символов расположена под пиктограммой 38a транспортного средства-носителя. Другими словами, вторая строка 38b символов расположена в самом нижнем положении из положений элементов, образующих второе информационное изображение 38.
[0052]
Вторая пиктограмма 38c маркера полосы движения представляет собой фигуру, указывающую маркеры полосы движения, изображающие границы одной или более полос движения на дороге, по которой движется транспортное средство-носитель.
[0053]
Пиктограмма 38d окружающих транспортных средств представляет собой фигуру, изображающую окружающее транспортное средство, движущееся в окружении транспортного средства-носителя. Окружающее транспортное средство включает в себя движущееся впереди транспортное средство и соседнее транспортное средство, движущееся по смежной полосе движения.
[0054]
Второе информационное изображение 38 показывает состояния движения транспортного средства-носителя и транспортного средства в окружении транспортного средства-носителя посредством пиктограммы 38a транспортного средства-носителя, второй пиктограммы 38c маркера полосы движения и пиктограммы 38d окружающих транспортных средств. Окружение транспортного средства-носителя включает в себя каждое из пространства в направлении впереди транспортного средства-носителя, пространства в левом и правом боковых направлениях транспортного средства-носителя и пространства в направлении позади транспортного средства-носителя. Второе информационное изображение 38 формируется для представления состояния движения транспортного средства в окружении транспортного средства-носителя при взгляде на транспортное средство-носитель из положений выше и сзади транспортного средства-носителя. Достаточно, если точка обзора, показывающая состояние движения, находится по меньшей мере над транспортным средством-носителем, поскольку задача состоит в восприятии состояния движения транспортного средства в окружении транспортного средства-носителя.
[0055]
На втором информационном изображении 38 состояние движения транспортного средства в окружении транспортного средства-носителя показано трехмерно. Использование трехмерного представления дополнительно увеличивает объем информации по сравнению с двухмерным представлением. Соответственно, второе информационное изображение 38 может обеспечивать водителю больше различных элементов информации, чем первое информационное изображение 41.
[0056]
Второе информационное изображение 38 формируется в заданные моменты времени, и каждый раз, когда формируется новое второе информационное изображение 38, второе информационное изображение 38, отображаемое на приборном дисплее 35, обновляется.
[0057]
Второе информационное изображение 38 не обязательно должно всегда включать в себя все из пиктограммы 38a транспортного средства-носителя, второй строки 38b символов, второй пиктограммы 38c маркера полосы движения и пиктограммы 38d окружающих транспортных средств. Второе информационное изображение 38 может включать в себя часть или все из пиктограммы 38a транспортного средства-носителя, второй строки 38b символов, второй пиктограммы 38c маркера полосы движения и пиктограммы 38d окружающих транспортных средств.
[0058]
Реальное состояние движения фактически движущегося транспортного средства-носителя отражается на состоянии движения транспортного средства в окружении транспортного средства-носителя, изображаемого вторым информационным изображением 38. Таким образом, если окружающее транспортное средство фактически отсутствует, второе информационное изображение 38 не включает в себя пиктограмму 38d окружающих транспортных средств. Кроме того, вторая пиктограмма 38c маркера полосы движения соответствует количеству полос движения на дороге, по которой фактически движется транспортное средство-носитель.
[0059]
Содержимое управления системы управления отражается во второй строке 38b символов. То есть при отсутствии запроса от системы управления второе информационное изображение 38 не включает в себя вторую строку 38b символов.
[0060]
Обращаясь вновь к Фиг. 1, будет подробно описан контроллер 10. Контроллер 10 включает в себя, в качестве множества схем обработки информации, блок 11 формирования маршрута, блок 12 обработки автоматического движения, блок 13 управления транспортным средством, блок 14 формирования изображения, блок 15 управления отображением, блок 16 управления громкоговорителем и блок 17 управления указателями поворота.
[0061]
Блок 11 формирования маршрута формирует маршрут к пункту назначения, заданному водителем. Блок 11 формирования маршрута выводит сформированный маршрут в блок 12 обработки автоматического движения. Блок 11 формирования маршрута может получить маршрут, сформированный внешним устройством.
[0062]
Блок 12 обработки автоматического движения выполняет различные процессы, необходимые для выполнения автоматической смены полосы движения. Автоматическая смена полосы движения включает в себя состояние предложения системы, в котором блок 12 обработки автоматического движения (система управления) делает предложение водителю выполнить автоматическую смену полосы движения, и состояние предложения водителя, в котором автоматическая смена полосы движения выполняется в ответ на приём предложения, сделанного водителем.
[0063]
Автоматическая смена полосы движения, предлагаемая системой, происходит, если определено, что смена полосы движения необходима для обгона движущегося впереди транспортного средства. В дополнение к вышеуказанному, автоматическая смена полосы движения, предлагаемая системой, происходит, если определено, что смена полосы движения необходима для поддержания маршрута, созданного блоком 11 формирования маршрута. С другой стороны, автоматическая смена полосы движения, предлагаемая водителем, происходит, если водитель приводит в действие переключатель 26 указателей поворота в направлении полосы движения, на которую водитель желает переместиться.
[0064]
Блок 12 обработки автоматического движения вычисляет положение транспортного средства-носителя, положение окружающего транспортного средства, относительную скорость между транспортным средством-носителем и движущимся впереди транспортным средством и тому подобное на основании элементов информации, выводимых устройством 20 оценки положения транспортного средства-носителя, устройством 21 получения карты, устройством 22 обнаружения информации об окружении и датчиком 23 скорости транспортного средства. Блок 12 обработки автоматического движения выполняет необходимые вычисления на основании положения транспортного средства-носителя, положения окружающего транспортного средства, относительной скорости между транспортным средством-носителем и движущимся впереди транспортным средством, маршрута, сформированного блоком 11 формирования маршрута, и тому подобного. В вычислениях, выполняемых блоком 12 обработки автоматического движения, также используются элементы информации, выводимой переключателем 24 рулевого управления, датчиком 25 касания и переключателем 26 указателей поворота. Кроме того, блок 12 обработки автоматического движения выдает управляющие команды, необходимые для автоматической смены полосы движения и процессов, связанных с ней, в блок 13 управления транспортным средством, блок 14 формирования изображения, блок 15 управления отображением, блок 16 управления громкоговорителем и блок 17 управления указателями поворота.
[0065]
Блок 13 управления транспортным средством управляет исполнительным механизмом 30 рулевого управления и тому подобным в ответ на управляющую команду от блока 12 обработки автоматического движения. Исполнительный механизм 30 рулевого управления и тому подобное работает в соответствии с управлением от блока 13 управления транспортным средством. Соответственно, осуществляется управление поведением транспортного средства-носителя, и это позволяет выполнять автоматическую смену полосы движения.
[0066]
Блок 14 формирования изображения формирует первое информационное изображение 41 и второе информационное изображение 38. Первое информационное изображение 41 формируется таким образом, чтобы представлять состояние движения транспортного средства впереди транспортного средства-носителя на основании элементов информации, выводимых устройством 20 оценки положения транспортного средства-носителя, устройством 21 получения карты, устройством 22 обнаружения информации об окружении и датчиком 23 скорости транспортного средства. Аналогичным образом, второе информационное изображение 38 формируется таким образом, чтобы представлять состояние движения транспортного средства в окружении транспортного средства-носителя на основании элементов информации, выводимых устройством 20 оценки положения транспортного средства-носителя, устройством 21 получения карты, устройством 22 обнаружения информации об окружении и датчиком 23 скорости транспортного средства.
[0067]
Кроме того, блок 14 формирования изображения формирует первое информационное изображение 41 таким образом, чтобы оно включало в себя первую строку 41b символов на основании управляющей команды от блока 12 обработки автоматического движения, то есть информацию, которая должна быть сообщена водителю. Аналогичным образом, блок 14 формирования изображения формирует второе информационное изображение 38 таким образом, чтобы оно включало в себя вторую строку 38b символов на основании управляющей команды от блока 12 обработки автоматического движения, то есть информацию, которая должна быть сообщена водителю.
[0068]
Блок 15 управления отображением отображает первое информационное изображение 41, формируемое блоком 14 формирования изображения, на проекционном дисплее 40. Кроме того, блок 15 управления отображением отображает второе информационное изображение 38, формируемое блоком 14 формирования изображения, на приборном дисплее 35.
[0069]
Блок 16 управления громкоговорителем управляет громкоговорителем 33 в ответ на управляющую команду от блока 12 обработки автоматического движения. Под управлением блока 16 управления громкоговорителем громкоговоритель 33 выводит звуковые уведомления водителю.
[0070]
Блок 17 управления указателями поворота управляет указателем 34 поворота в ответ на управляющую команду от блока 12 обработки автоматического движения. Управление указателем 34 поворота блоком 17 управления указателями поворота приводит в действие либо левый, либо правый указатель 34 поворота.
[0071]
Устройство управления отображением согласно настоящему варианту осуществления включает в себя блок 14 формирования изображения и блок 15 управления отображением среди множества схем обработки информации, составляющих контроллер 10. Способ управления отображением согласно настоящему варианту осуществления включает в себя различные процессы, выполняемые блоком 14 формирования изображения и блоком 15 управления отображением.
[0072]
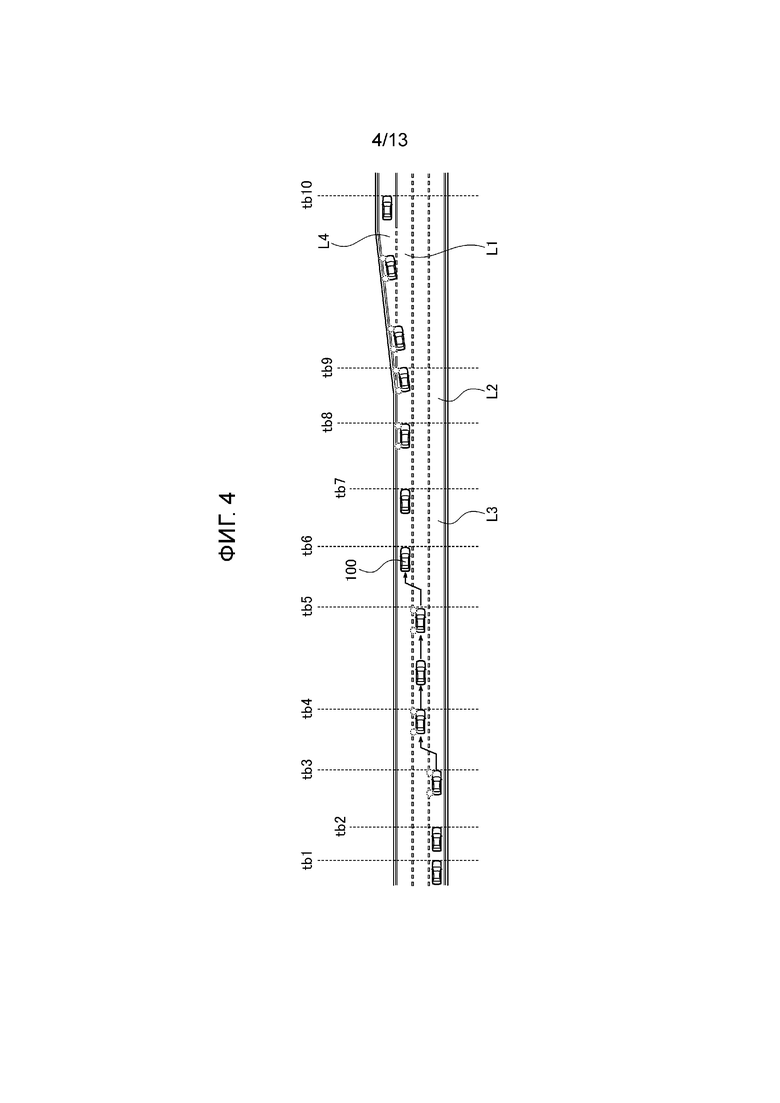
Далее с обращением к Фиг. 4 будет приведено описание последовательностей операций автоматической смены полосы движения, предлагаемой системой, на примере ситуации, в которой поддерживается маршрут, сформированный блоком 11 формирования маршрута. Чтобы двигаться к съезду L4, который ответвляется от главной дороги, транспортное средство-носитель 100 выполняет автоматическую смену полосы движения с третьей полосы L3 движения на вторую полосу L2 движения, затем со второй полосы L2 движения на первую полосу L1 движения, и затем с первой полосы L1 движения на съезд L4.
[0073]
При автоматической смене полосы движения последовательности операций управления блока 12 обработки автоматического движения включают в себя следующее.
(1) Блок предлагает водителю автоматическую смену полосы движения (момент времени tb1).
(2) Блок принимает согласие водителя на автоматическую смену полосы движения (момент времени tb2).
(3) Перед началом автоматической смены полосы движения на вторую полосу L2 движения указатель 34 поворота приводится в действие в направлении полосы движения, на которую должно переместиться транспортное средство-носитель (момент времени tb3).
(4) Блок завершает автоматическую смену полосы движения на вторую полосу L2 движения (первая автоматическая смена полосы движения) (момент времени tb4).
(5) Перед началом автоматической смены полосы движения на первую полосу L1 движения указатель 34 поворота приводится в действие в направлении полосы движения, на которую должно переместиться транспортное средство-носитель (момент времени tb5).
(6) Блок завершает автоматическую смену полосы движения на первую полосу L1 движения (вторая автоматическая смена полосы движения) (момент времени tb6).
(7) Блок определяет, что расстояние между точкой ответвления съезда L4 и транспортным средством-носителем 100 становится заданным первым расстоянием (момент времени tb7).
(8) Перед началом автоматической смены полосы движения на съезд L4, указатель 34 поворота приводится в действие в направлении съезда L4, на который должно переместиться транспортное средство-носитель (момент времени tb8).
(9) Блок определяет, что транспортное средство-носитель 100 достигло точки ответвления (момент времени tb9).
(10) Блок завершает автоматическую смену полосы движения на съезд L4 (третья автоматическая смена полосы движения) (момент времени tb10).
[0074]
Управление, выполняемое блоком 12 обработки автоматического движения в соответствии с автоматической сменой полосы движения, и процессы, связанные с ним, включают в себя множество процессов, описанных выше. Первое информационное изображение 41, отображаемое на проекционном дисплее 40, и второе информационное изображение 38, отображаемое на приборном дисплее 35, изменяются в зависимости от каждого процесса управления.
[0075]
При автоматической смене полосы движения с третьей полосы L3 движения на съезд L4 первое информационное изображение 41 и второе информационное изображение 38 изменяются в зависимости от 10 процессов.
[0076]
В процессе до момента времени tb1 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения (не показано). В процессе от момента времени tb1 до момента времени tb2 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого, предлагающего водителю автоматическую смену полосы движения (Фиг. 5A). В процессе от момента времени tb2 до момента времени tb3 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого, указывающего, что принято согласие водителя на выполнение автоматической смены полосы движения (Фиг. 5B). В процессе от момента времени tb3 до момента времени tb4 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого, указывающего, что выполняется автоматическая смена полосы движения (Фиг. 5C).
[0077]
В процессе от момента времени tb4 до момента времени tb5 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого для уведомления о второй автоматической смене полосы движения (Фиг. 5D). В процессе от момента времени tb5 до момента времени tb6 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого, указывающего, что выполняется автоматическая смена полосы движения (Фиг. 5E). В процессе от момента времени tb6 до момента времени tb7 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого, указывающего, что непрерывно выполняется автоматическая смена полосы движения (Фиг. 5F).
[0078]
В процессе от момента времени tb7 до момента времени tb8, первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого для сообщения о том, что транспортное средство-носитель будет двигаться на съезд L4 (Фиг. 5G). В процессе от момента времени tb9 до момента времени tb10 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого, указывающего, что выполняется автоматическая смена полосы движения (Фиг. 5H). В процессе в момент времени tb10 или после него первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения (Фиг. 5I).
[0079]
Как показано на Фиг. 5A-5I, первое информационное изображение 41 включает в себя пиктограмму 41a движущегося впереди транспортного средства и первую пиктограмму 41d маркера полосы движения и показывает состояние движения транспортного средства впереди транспортного средства-носителя. Второе информационное изображение 38 включает в себя пиктограмму 38a транспортного средства-носителя, вторую пиктограмму 38c маркера полосы движения и пиктограмму 38d окружающих транспортных средств и показывает состояние движения транспортного средства в окружении транспортного средства-носителя.
[0080]
Кроме того, первое информационное изображение 41 включает в себя первую строку 41b символов, а второе информационное изображение 38 включает в себя вторую строку 38b символов. Пример первой строки 41b символов и второй строки 38b символов будет описан ниже.
[0081]
На Фиг. 5B первая строка 41b символов представляет собой строку символов «(Пиктограмма) Движение на съезд». Пиктограмма в первой строке 41b символов соответствует пиктограмме, нанесенной на переключатель 24 рулевого управления, и имеет значение, побуждающее привести в действие переключатель 24 рулевого управления (то же самое применимо и далее). Строка символов «(Пиктограмма) Движение на съезд» указывает содержание, предлагающее водителю автоматическую смену полосы движения.
[0082]
На Фиг. 5B вторая строка 38b символов включает в себя строки символов «Съезд в направлении впереди слева», «Подтвердите безопасность» и «(Пиктограмма) Движение на съезд». Строка символов «(Пиктограмма) Движение на съезд» указывает содержание, предлагающее водителю автоматическую смену полосы движения. Строка символов «Съезд в направлении впереди слева» указывает причину, по которой предлагается автоматическая смена полосы движения. Строка символов «Подтвердите безопасность» указывает на содержание предложения водителю подтвердить безопасность. Как описано выше, вторая строка 38b символов включает в себя первую строку 41b символов («(Пиктограмма) Движение на съезд»). Другими словами, первая строка 41b символов является такой же, как и часть второй строки 38b символов.
[0083]
Кроме того, первое информационное изображение 41 включает в себя пиктограмму 41e стрелки. Процесс изменения пиктограммы 41e стрелки будет описан ниже. Пиктограмма 41е стрелки отображается в момент, когда водителю предлагается автоматическая смена полосы движения.
[0084]
Ситуация отображения по Фиг. 5A соответствует процессу с момента времени, когда водителю предлагается выполнить автоматическую смену полосы движения, до момента времени, когда принято согласие водителя на выполнение автоматической смены полосы движения (от момента времени tb1 до момента времени tb2). Пиктограмма 41e стрелки мигает белым.
[0085]
Ситуация отображения, показанная на Фиг. 5B, соответствует процессу от момента времени, когда принято согласие водителя на выполнение автоматической смены полосы движения, до момента времени, когда указатель 34 поворота приводится в действие в направлении полосы движения, на которую должно переместиться транспортное средство (от момента времени tb2 до момента времени tb3). Пиктограмма 41e стрелки горит белым. Освещенная область, которая подсвечивается белым цветом, находится на пиктограмме 41e стрелки, которая представляет собой фигуру, представляющую стрелку, и динамически изменяется на фигуре. В частности, на пиктограмме 41e стрелки освещенная область, которая освещена в стрелке, постепенно увеличивается от стороны основания стрелки (нижняя сторона фигуры) к стороне конца стрелки (верхняя сторона фигуры). Когда освещенная область достигает конца стрелки (то есть, когда освещена вся стрелка), освещение всей стрелки однократно выключается. Затем повторяется серия последовательностей операций от увеличения освещенной области в стрелке до освещения всей стрелки, а затем до выключения освещения всей стрелки. На Фиг. 5B закрашенная черным область, обозначенная пиктограммой 41e стрелки, представляет освещенную область, которая подсвечивается белым, для удобства, и, в качестве альтернативы, закрашенная белым область представляет собой неосвещенную область для удобства (то же самое относится к Фиг. 5D и 5G, описанным ниже).
[0086]
Ситуация отображения на Фиг. 5C соответствует процессу от приведения в действие указателя 34 поворота в направлении, в котором выполняется автоматическая смена полосы движения, до завершения первой автоматической смены полосы движения (от момента времени tb3 до момента времени tb4). Вызывается мигание пиктограммы 41e стрелки зеленым цветом, который имеет тот же цвет, что и цвет отображения пиктограммы 41c отображения режима. На Фиг. 5C пиктограмма 41e стрелки с черной заливкой означает, что вызывается мигание пиктограммы зеленым цветом, для удобства (то же самое относится к Фиг. 5E, 5H и 7B, которые будут описаны ниже).
[0087]
Ситуация отображения на Фиг. 5D соответствует процессу от завершения первой автоматической смены полосы движения до приведения в действие указателя 34 поворота для выполнения второй автоматической смены полосы движения (от момента времени tb4 до момента времени tb5). Пиктограмма 41e стрелки освещается белым. Освещенная область, которая освещается белым цветом, находится в пиктограмме 41e стрелки, которая представляет собой фигуру, представляющую стрелку, и динамически изменяется.
[0088]
Ситуация отображения на Фиг. 5E соответствует процессу от приведения в действие указателя 34 поворота в направлении, в котором выполняется вторая автоматическая смена полосы движения, до завершения второй автоматической смены полосы движения (от момента времени tb5 до момента времени tb6). В этом случае вызывается мигание пиктограммы 41е стрелки зеленым цветом.
[0089]
Отдельные ситуации отображения на Фиг. 5G и 5H относятся к третьей автоматической смене полосы движения, и их подробности являются такими же, как и у отдельных ситуаций отображения на Фиг. 5D и 5E. Ситуация отображения, показанная на Фиг. 5F, указывает, что автоматическая смена полосы движения выполняется непрерывно в течение времени от завершения второй автоматической смены полосы движения до начала третьей автоматической смены полосы движения.
[0090]
Кроме того, ситуация отображения на Фиг. 5I соответствует завершению третьей автоматической смены полосы движения, то есть завершению всех автоматических смен полосы движения. Отображение пиктограммы 41e стрелки заканчивается.
[0091]
Блок 14 формирования изображения и блок 15 управления отображением формируют и отображают первое информационное изображение 41 и второе информационное изображение 38, как описано выше, в ответ на управляющую команду от блока 12 обработки автоматического движения. В это время блок 15 управления отображением отображает первое информационное изображение 41 и второе информационное изображение 38 таким образом, что первая строка 41b символов и вторая строка 38b символов отображаются одновременно.
[0092]
Обращаясь к Фиг. 6, ниже будут описаны последовательности автоматической смены полосы движения, предлагаемой водителем. После того, как водитель приводит в действие переключатель 26 указателя поворота, транспортное средство-носитель 100 выполняет автоматическую смену полосы движения с первой полосы L1 движения на вторую полосу L2 движения.
[0093]
При автоматической смене полосы движения последовательности операций управления блока 12 обработки автоматического движения включают в себя следующее. (1) Водитель приводит в действие переключатель 26 указателей поворота (момент времени ta1).
(2) Автоматическая смена полосы движения на вторую полосу L2 движения завершается (момент времени ta2).
[0094]
Управление, выполняемое блоком 12 обработки автоматического движения в соответствии с автоматической сменой полосы движения и связанными с ним процессами, включает в себя множество процессов, как описано выше. Первое информационное изображение 41, отображаемое на проекционном дисплее 40, и второе информационное изображение 38, отображаемое на приборном дисплее 35, изменяются в зависимости от каждого процесса управления.
[0095]
При автоматической смене полосы движения с первой полосы L1 движения на вторую полосу L2 движения первое информационное изображение 41 и второе информационное изображение 38 изменяются в зависимости от трех процессов.
[0096]
В процессе до момента времни ta1 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения (Фиг. 7A). В процессе от момента времени ta1 до момента времени ta2 первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения, и содержимого, указывающего, что выполняется автоматическая смена полосы движения (Фиг. 7B). В процессе в момент времени ta2 время или после него первое информационное изображение 41 и второе информационное изображение 38 в основном состоят из содержимого, указывающего состояние движения (Фиг. 7C).
[0097]
Как показано на Фиг. 7A-7C, первое информационное изображение 41 включает в себя пиктограмму 41a движущегося впереди транспортного средства и первую пиктограмму 41d маркера полосы движения и показывает состояние движения транспортного средства впереди транспортного средства-носителя. Кроме того, второе информационное изображение 38 включает в себя пиктограмму 38a транспортного средства-носителя, вторую пиктограмму 38c маркера полосы движения и пиктограмму 38d окружающих транспортных средств и показывает состояние движения транспортного средства в окружении транспортного средства-носителя.
[0098]
Кроме того, первое информационное изображение 41 включает в себя первую строку 41b символов, а второе информационное изображение 38 включает в себя вторую строку 38b символов. Пример первой строки 41b символов и второй строки 38b символов будет описан ниже.
[0099]
На фиг. 7B первая строка 41b символов представляет собой строку символов «Подтвердите безопасность». Строка символов «Подтвердите безопасность» указывает содержимое, побуждающее водителя подтвердить безопасность.
[0100]
На Фиг. 7B вторая строка 38b символов включает в себя строки символов «Подтвердите безопасность» и «(Пиктограмма) Выполните длительное нажатие для отмены». Строка символов «Подтвердите безопасность» указывает содержимое, побуждающее водителя подтвердить безопасность. Строка символов «(Пиктограмма) Выполните длительное нажатие для отмены» указывает содержимое для сообщения водителю о том, каким образом можно остановить автоматическую смену полосы движения. Таким образом, вторая строка 38b символов включает в себя первую строку 41b символов («Подтвердите безопасность»). Другими словами, первая строка 41b символов является такой же, как часть второй строки 38b символов.
[0101]
Кроме того, первое информационное изображение 41 включает в себя пиктограмму 41e стрелки. Пиктограмма 41e стрелки будет описана ниже. Пиктограмма 41e стрелки отображается, когда водитель приводит в действие переключатель 26 указателей поворота.
[0102]
Ситуация отображения на Фиг. 7B соответствует процессу от приведения в действие водителем переключателя 26 указателей поворота до завершения автоматической смены полосы движения (от момента времени ta1 до момента времени ta2). Вызывается мигание пиктограммы 41e стрелки зеленым цветом.
[0103]
Ситуация отображения, показанная на Фиг. 7С, соответствует случаю, в котором автоматическая смена полосы движения завершена. Отображение пиктограммы 41e стрелки заканчивается.
[0104]
Ниже будут описаны различные формы второго информационного изображения 38.
[0105]
Блок 12 обработки автоматического движения выполняет управление следованием (навигационное управление следованием) для обеспечения движения транспортного средства-носителя путем следования маршруту, формируемому блоком 11 формирования маршрута. Блок 12 обработки автоматического движения выполняет описанную выше автоматическую смену полосы движения при управлении следованием. Однако при определении заданного условия, например затора на дороге, блок 12 обработки автоматического движения запрещает функцию автоматической смены полосы движения.
[0106]
В случае периода времени, в течение которого может выполняться автоматическая смена полосы движения, второе информационное изображение 38 имеет форму, показанную на Фиг. 8А. То есть второе информационное изображение 38 включает в себя вторую пиктограмму 38c маркера полосы движения (первое изображение полосы движения), которая содержит полосу движения транспортного средства-носителя, по которой движется транспортное средство-носитель, и смежную полосу движения, которая является смежной с полосой движения транспортного средства-носителя. С другой стороны, в случае периода времени, в течение которого автоматическая смена полосы движения не может выполняться, второе информационное изображение 38 имеет форму, показанную на Фиг. 8B. То есть второе информационное изображение 38 включает в себя вторую пиктограмму 38c маркера полосы движения (второе изображение полосы движения), которая содержит только полосу движения транспортного средства-носителя, по которой движется транспортное средство-носитель.
[0107]
Как описано выше, в способе управления отображением согласно настоящему варианту осуществления, когда система управления предлагает водителю транспортного средства-носителя автоматическую смену полосы движения, на проекционном дисплее 40 отображается изображение, показывающее стрелку для указания на автоматическую смену полосы движения (пиктограмма 41e стрелки) , и способ отображения пиктограммы 41e стрелки переключается в ответ на множество процессов управления, выполняемых системой управления.
[0108]
Водитель может воспринимать состояние управления, выполняемого системой управления, по изменению способа отображения пиктограммы 41e стрелки. В результате можно обеспечить отображение, которое легко понять водителю, и отображение, обеспечивающее водителю ощущение безопасности.
[0109]
Первый процесс из множества процессов в способе управления отображением согласно настоящему варианту осуществления начинается с момента, когда система управления предлагает водителю автоматическую смену полосы движения, до момента, когда система управления принимает согласие водителя на выполнение автоматической смены полосы движения. В первом процессе вызывается мигание пиктограммы 41е стрелки. Второй процесс из множества процессов в способе управления отображением начинается с момента, когда система управления принимается согласие водителя на выполнение автоматической смены полосы движения, до момента, когда система управления приводит в действие указатель 34 поворота в направлении, в котором выполняется автоматическая смена полосы движения. Во втором процессе пиктограмма 41e стрелки изменяется таким образом, что освещенная область увеличивается от стороны основания стрелки до стороны конца стрелки. Третий процесс из множества процессов в способе управления отображением начинается с момента, когда система управления приводит в действие указатель 34 поворота в направлении, в котором выполняется автоматическая смена полосы движения, до момента, когда выполнение системой управления автоматической смены полосы движения завершается. В третьем процессе вызывается мигание пиктограммы 41е стрелки. В способе управления отображением отображение пиктограммы 41e стрелки заканчивается, если автоматическая смена полосы движения посредством системы управления завершена.
[0110]
Режим отображения пиктограммы 41e стрелки переключается в момент времени перехода от первого процесса ко второму процессу. Это позволяет водителю понять, что система управления приняла согласие водителя. Кроме того, режим отображения пиктограммы 41e стрелки переключается в момент времени перехода от второго процесса к третьему процессу. Это позволяет водителю понять, что началась автоматическая смена полосы движения, то есть началось управление поведением транспортного средства-носителя. Кроме того, окончание отображения пиктограммы 41e стрелки позволяет водителю понять, что автоматическая смена полосы движения посредством системы управления завершена.
[0111]
В первом и втором процессах в способе управления отображением согласно настоящему варианту осуществления пиктограмма 41e стрелки отображается в первом цвете отображения. В третьем процессе пиктограмма 41е стрелки отображается во втором цвете отображения, отличном от первого цвета отображения.
[0112]
В момент времени, когда начинается управление поведением транспортного средства-носителя, цвет отображения пиктограммы 41e стрелки переключается. Соответственно, водитель может заранее воспринимать, что начинается управление поведением транспортного средства-носителя, с цвета отображения пиктограммы 41e стрелки.
[0113]
В настоящем варианте осуществления первый цвет отображения является белым цветом, а второй цвет отображения является зеленым цветом. Цвет устанавливается таким же, как цвет пиктограммы 41c отображения режима в режиме ручного управления. Это дает позволяет сообщить водителю о том факте, что водителю необходимо слегка прикоснуться руками к рулевому управлению 1, простым для понимания способом, когда начинается управление поведением транспортного средства-носителя.
[0114]
Кроме того, в способе управления отображением согласно настоящему варианту осуществления предложение автоматической смены полосы движения посредством системы управления может включать в себя первую автоматическую смену полосы движения и вторую автоматическую смену полосы движения после первой автоматической смены полосы движения. В этом случае в способе управления отображением происходит четвертый процесс с момента завершения первой автоматической смены полосы движения посредством системы управления до момента, когда система управления приводит в действие указатель 34 поворота для второй автоматической смены полосы движения. В четвертом процессе пиктограмма 41e стрелки изменяется таким образом, что освещенная область увеличивается от стороны основания стрелки к стороне конца стрелки. Пятый процесс в способе управления отображением происходит с момента, когда система управления приводит в действие указатель 34 поворота для второй автоматической смены полосы движения, до момента, когда вторая автоматическая смена полосы движения посредством системы управления завершается. В пятом процессе вызывается мигание пиктограммы 41е стрелки.
[0115]
Согласие водителя уже принято перед первой автоматической сменой полосы движения, поэтому для второй автоматической смены полосы движения не требуется согласие водителя. Это позволяет использовать спецификации управления с меньшими нагрузками на водителя. Путем исключения состояния, в котором вызывается мигание пиктограммы 41e стрелки белым, водитель может понимать на основании отображения процесс управления, в котором согласие водителя на выполнение второй автоматической смены полосы движения пропущено.
[0116]
Кроме того, в способе управления отображением согласно настоящему варианту осуществления пиктограмма 41e стрелки отображается, если система управления определяет, что водитель активировал указатель 34 поворота, чтобы побудить систему управления начать автоматическую смену полосы движения. В способе управления отображением пиктограмма 41e стрелки отображается в состоянии мигания в течение периода времени от момента, когда водитель приводит в действие указатель 34 поворота, до момента, когда автоматическая смена полосы движения посредством системы управления завершена.
[0117]
Если автоматическая смена полосы движения выполняется на основании намерения водителя, ясно, что водитель намеревается выполнить автоматическую смену полосы движения, и, следовательно, процесс управления также упрощён. Это позволяет управлять автоматической сменой полосы движения посредством простого способа отображения.
[0118]
Кроме того, в способе управления отображением согласно настоящему варианту осуществления, если выполняется условие, при котором может выполняться автоматическая смена полосы движения, дополнительно отображается первое изображение полосы движения (вторая пиктограмма 38c маркера полосы движения). Первое изображение полосы движения указывает полосу движения транспортного средства-носителя, по которой движется транспортное средство-носитель, и смежную полосу движения, которая является смежной с полосой движения транспортного средства-носителя. В качестве альтернативы, в способе управления отображением, если не выполняется условие, при котором может выполняться автоматическая смена полосы движения, дополнительно отображается второе изображение полосы движения (вторая пиктограмма 38c маркера полосы движения), указывающее только полосу движения транспортного средства-носителя.
[0119]
Водитель может определить, находится ли водитель в ситуации, когда необходимо выполнить автоматическую смену полосы движения, на основании отображаемого состояния полосы движения.
[0120]
Устройство управления отображением согласно настоящему варианту осуществления включает в себя контроллер 10, который управляет проекционным дисплеем 40, который может визуально распознаваться водителем транспортного средства-носителя. Если система управления предлагает водителю транспортного средства-носителя автоматическую смену полосы движения, контроллер 10 отображает пиктограмму 41e стрелки, представляющий стрелку для направления автоматической смены полосы движения, на проекционном дисплее 40, и переключает способ отображения пиктограммы 41e стрелки в зависимости от множества процессов управления, выполняемых системой управления.
[0121]
Устройство управления отображением согласно настоящему варианту осуществления имеет технические признаки, соответствующие способу управления отображением, описанному выше, и достигает того же эффекта, что и способ управления отображением.
[0122]
Настоящее изобретение не ограничено вариантом осуществления, описанным выше, и возможны различные модификации, не выходящие за рамки объема настоящего изобретения.
[0123]
Например, в первом изображении, отображаемом на проекционном дисплее, пиктограмма транспортного средства может представлять собой фигуру, представляющей транспортное средство, но не ограничена фигурой, представляющей движущееся впереди транспортное средство. Кроме того, на втором изображении, отображаемом на приборном дисплее, пиктограмма транспортного средства может представлять собой фигуру, представляющую транспортное средство, но не ограничена фигурой, представляющей транспортное средство-носитель.
[0124]
Пиктограмма стрелки отображается на проекционном дисплее, и управление согласно настоящему варианту осуществления применяется к пиктограмме стрелки. Однако аналогичное управление может выполняться посредством приборного дисплея. Переключение между изображением первой полосы движения и изображением второй полосы движения может применяться к отображению на проекционном дисплее.
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0125]
10. Контроллер
11. Блок формирования маршрута
12. Блок обработки автоматического движения
13. Блок управления транспортным средством
14. Блок формирования изображения
15. Блок управления отображением
16. Блок управления громкоговорителем
17. Блок управления указателями поворота
20. Устройство оценки местоположения транспортного средства-носителя
21. Устройство получения карты
22. Устройство обнаружения информации об окружении
23. Датчик скорости транспортного средства
24. Переключатель рулевого управления
25. Датчик касания
26. Переключатель указателей поворота
30. Исполнительный механизм рулевого управления
31. Исполнительный механизм педали акселератора
32. Исполнительный механизм тормоза
33. Громкоговоритель
34. Указатель поворота
35. Приборный дисплей
40. Проекционный дисплей











Изобретение относится к способу управления отображением и устройству управления отображением. Способ управления отображением для отображения операций для выполнения смены полосы движения системой управления, которая управляет поведением транспортного средства ТС-носителя, содержит этапы отображения. Отображают изображение, показывающее стрелку для указания на смену полосы движения, на дисплее, который может быть визуально распознан водителем, в ситуации, когда система управления предлагает водителю ТС-носителя выполнить смену полосы движения. Причём изображение отображается на дисплее в ответ на предложение выполнить смену полосы движения, сделанное водителю системой управления. Изображение отображается на дисплее в ответ на согласие водителя с упомянутым предложением. Изображение отображается на дисплее в соответствии с приведением в действие указателя поворота в направлении, в котором системой управления выполняется смена полосы движения. Причём режим отображения стрелки переключается с первого режима отображения по третий режим отображения на каждом этапе отображения. Отображение стрелки заканчивается, если системой управления завершена автоматическая смена полосы движения. Повышается безопасность при эксплуатации ТС-носителя. 2 н. и 5 з.п. ф-лы, 19 ил.
1. Способ управления отображением для отображения операций для выполнения смены полосы движения системой управления, которая управляет поведением транспортного средства-носителя, причем способ управления отображением содержит этапы, на которых:
отображают изображение, показывающее стрелку для указания на смену полосы движения, на дисплее, который может быть визуально распознан водителем, в ситуации, когда система управления предлагает водителю транспортного средства-носителя выполнить смену полосы движения; причём
изображение отображается на дисплее в ответ на предложение выполнить смену полосы движения, сделанное водителю системой управления, причём режим отображения стрелки представляет собой первый режим отображения;
изображение отображается на дисплее в ответ на согласие водителя с упомянутым предложением, причём режим отображения стрелки переключается с первого режима отображения на второй режим отображения; и
изображение отображается на дисплее в соответствии с приведением в действие указателя поворота в направлении, в котором системой управления выполняется смена полосы движения, причём режим отображения стрелки переключается со второго режима отображения на третий режим отображения; и
отображение стрелки заканчивается, если системой управления завершена автоматическая смена полосы движения.
2. Способ управления отображением по п. 1, в котором
в первом процессе из множества процессов вызывается мигание изображения, причем первый процесс начинается с момента, когда система управления предлагает водителю выполнить смену полосы движения, до момента перед тем, как система управления принимает согласие водителя на выполнение смены полосы движения;
во втором процессе из множества процессов изображение изменяется таким образом, что освещенная область увеличивается от стороны основания стрелки до стороны конца стрелки, причем второй процесс начинается с момента, когда система управления принимает согласие от водителя на выполнение смены полосы движения, до момента перед тем, как система управления приводит в действие указатель поворота в направлении, в котором выполняется смена полосы движения;
в третьем процессе из множества процессов вызывается мигание изображения, причем третий процесс начинается с момента, когда система управления приводит в действие указатель поворота в направлении, в котором выполняется смена полосы движения, до момента перед тем, как смена полосы движения посредством системы управления завершается; и
когда смена полосы движения посредством системы управления завершена, отображение изображения заканчивается.
3. Способ управления отображением по п. 2, в котором
в первом процессе и во втором процессе изображение отображается в первом цвете отображения; и
в третьем процессе изображение отображается во втором цвете отображения, отличном от первого цвета отображения.
4. Способ управления отображением по п. 2 или 3, в котором
если предложение выполнить смену полосы движения, сделанное системой управления, включает в себя первую смену полосы движения и вторую смену полосы движения после первой смены полосы движения, в четвертом процессе изображение изменяется таким образом, что освещенная область увеличивается со стороны основания стрелки до стороны конца стрелки, причём четвертый процесс выполняется от момента, когда первая смена полосы движения посредством системы управления завершена, до момента перед тем, как система управления приводит в действие указатель поворота для второй смены полосы движения; и
в пятом процессе вызывается мигание изображения, причем пятый процесс выполняется с момента, когда система управления приводит в действие указатель поворота для второй смены полосы движения, до момента перед тем, как вторая смена полосы движения посредством системы управления завершается.
5. Способ управления отображением по п. 1, в котором
изображение отображается, если система управления определяет, что водитель привёл в действие указатель поворота, чтобы побудить систему управления начать смену полосы движения; и
изображение отображается в мигающем состоянии в течение времени от момента, когда водитель приводит в действие указатель поворота, до момента перед тем, как смена полосы движения посредством системы управления завершена.
6. Способ управления отображением по любому из пп. 1-5, в котором
дополнительно отображается первое изображение полосы движения, если выполнено условие, при котором может быть выполнена смена полосы движения, причём первое изображение полосы движения показывает полосу движения транспортного средства-носителя, по которой движется транспортное средство-носитель, и смежную полосу движения, которая является смежной с полосой движения транспортного средства-носителя; и
второе изображение полосы движения, показывающее только полосу движения транспортного средства-носителя, дополнительно отображается, если условие, при котором может быть выполнена смена полосы движения, не выполнено.
7. Устройство управления отображением для отображения операций для выполнения смены полосы движения системой управления, которая управляет поведением транспортного средства-носителя, при этом устройство управления отображением содержит:
контроллер, который управляет дисплеем, который может быть визуально распознан водителем транспортного средства-носителя; причём
в ситуации, когда система управления предлагает водителю транспортного средства-носителя выполнить смену полосы движения, контроллер отображает на дисплее изображение, показывающее стрелку для указания на смены полосы движения;
изображение отображается на дисплее в ответ на предложение выполнить смену полосы движения, сделанное водителю системой управления, причём режим отображения стрелки представляет собой первый режим отображения;
изображение отображается на дисплее в ответ на согласие водителя с упомянутым предложением, причём режим отображения стрелки переключается с первого режима отображения на второй режим отображения; и
изображение отображается на дисплее в соответствии с приведением в действие указателя поворота в направлении, в котором системой управления выполняется смена полосы движения, причём режим отображения стрелки переключается со второго режима отображения на третий режим отображения; и
отображение стрелки заканчивается, если системой управления завершена автоматическая смена полосы движения.
| US 20190047561 A1, 14.02.2019 | |||
| US 20160304126 A1, 20.10.2016 | |||
| JP 201784112 A, 18.05.2017 | |||
| УСТРОЙСТВО ПОМОЩИ ПРИ ОТОБРАЖЕНИИ И СПОСОБ ПОМОЩИ ПРИ ОТОБРАЖЕНИИ | 2016 |
|
RU2678436C1 |

