ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к управлению передвижной машиной. Более конкретно, настоящее изобретение относится к адаптивно идентифицируемым целевым показателям, используемым для управления передвижной машиной.
УРОВЕНЬ ТЕХНИКИ
Существует большое множество различных типов передвижных машин. Некоторые подобные машины среди прочего включают сельскохозяйственные машины, строительные машины, машины, используемые в лесотехнической промышленности, и машины, используемые для управления газонами.
Подобными машинами также можно управлять с помощью множества различных типов систем управления. В некоторых системах управления используются датчики или другие механизмы для измерения переменных, которые свидетельствуют о показателе машины. Они позволяют пользователю устанавливать заданное значение или пороговое значение, которое система управления машины использует для регулирования подсистем машины для того, чтобы достигать требуемого целевого показателя.
Однако подобные машины часто работают в большом разнообразии различных типов условий. Сельскохозяйственные машины, например, можно задействовать на множестве различных сельскохозяйственных культур и при множестве различных условий. Аналогичным образом, часто существует варьирование от машины к машине и от условия к условию. Таким образом, контрольные пороговые значения или заданные значения часто устанавливают консервативно, таким образом, чтобы их можно было использовать во множестве различных условий, на множестве различных машин. Другие позволяют пользователю выбирать набор условий, а система управления получает доступ к заданному значению или контрольным пороговым значениям (например, из таблицы), которые коррелируют с данными условиями.
Другие системы исходят из установки пользователем статистического заданного значения или контрольного порогового значения. Например, оператор может предоставлять входную информацию, заставляющую машину вводить режим, в котором должны быть установлены контрольные пороговые значения или заданные значения. Затем машина обеспечивает пользователю возможность ручной регулировки настроек машины для достижения требуемого показателя машины, и тогда обеспечивается ввод информации пользователем. В ответ, машина фиксирует текущие переменные значения (которые свидетельствуют о показателе машины) и использует одно или более данных значений в качестве контрольных пороговых значений или заданных значений при управлении машиной. Во всех системах данных типов имеется пользовательский выбор статистического контрольного порогового значения или заданного значения для управления машиной с целью достижения требуемого целевого показателя.
Обсуждение выше предоставлено только для общей базовой информации и не предназначено для использования в качестве помощи при определении объема заявленного предмета изобретения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Значения сигнала датчика, указывающие критерий показателя, получают и регистрируют на протяжении заданного временного периода. Значения сигнала датчика объединяют, и на основании объединенных значений сигнала датчика идентифицируют пороговое значение сигнала. На основании идентифицированного порогового значения сигнала генерируется набор управляющих сигналов для регулирования подсистем на передвижной машине, и подсистемы регулируют на основании управляющих сигналов.
Данное краткое изложение изобретения представлено для введения в упрощенном виде выбора концепций, которые дополнительно описаны ниже в подробном описании изобретения. Данное краткое изложение изобретения не предназначено для идентификации ключевых признаков или существенных признаков заявленного изобретения и не предназначено для использования в качестве помощи при определении объема заявленного изобретения. Заявленное изобретение не ограничен вариантами осуществления, которые решают какую-либо или все проблемы, отмеченные в разделе уровень техники.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 представляет собой блок-схему одного примера сельскохозяйственной машины.
ФИГ. 2 представляет собой частично графическое, частично схематичное изображение примера, в котором передвижной машиной является комбайн.
ФИГ. 3 представляет собой блок-схему, показывающую один пример системы управления более подробно.
ФИГ. 4A и 4B (совместно упоминаемые в данном документе, как ФИГ. 4) показывают технологическую схему, иллюстрирующую один пример работы системы управления, показанной на фиг. 3.
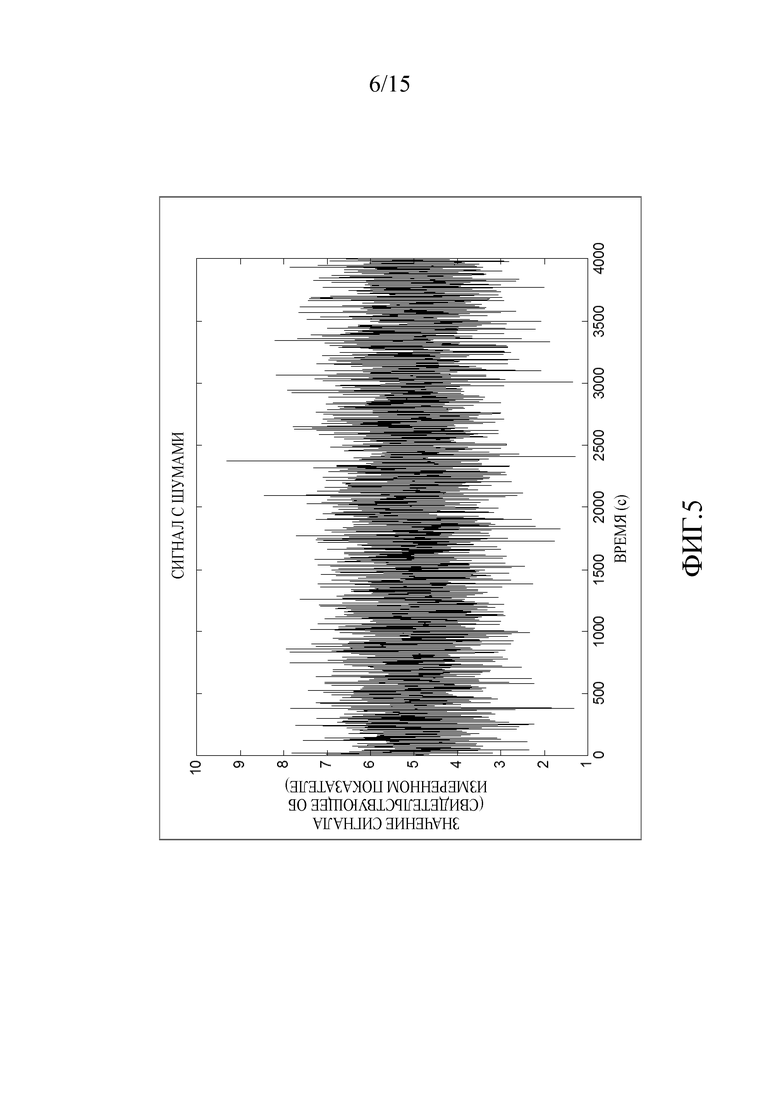
ФИГ. 5 показывает один пример сигнала, который регистрируется и который является показателем измеренной переменной, используемой для установки контрольного порогового значения или заданного значения.
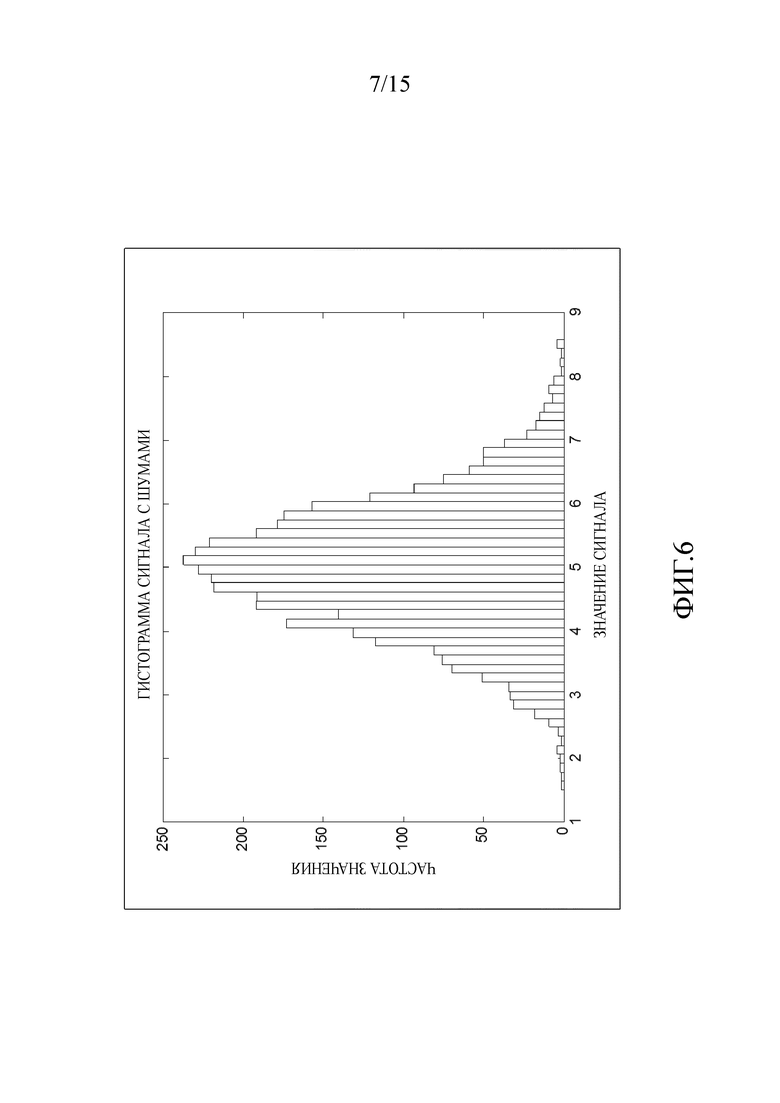
ФИГ. 6 представляет собой график, показывающий значения сигнала для сигнала, зарегистрированного на фиг. 5, объединенных для представления в виде гистограммы.
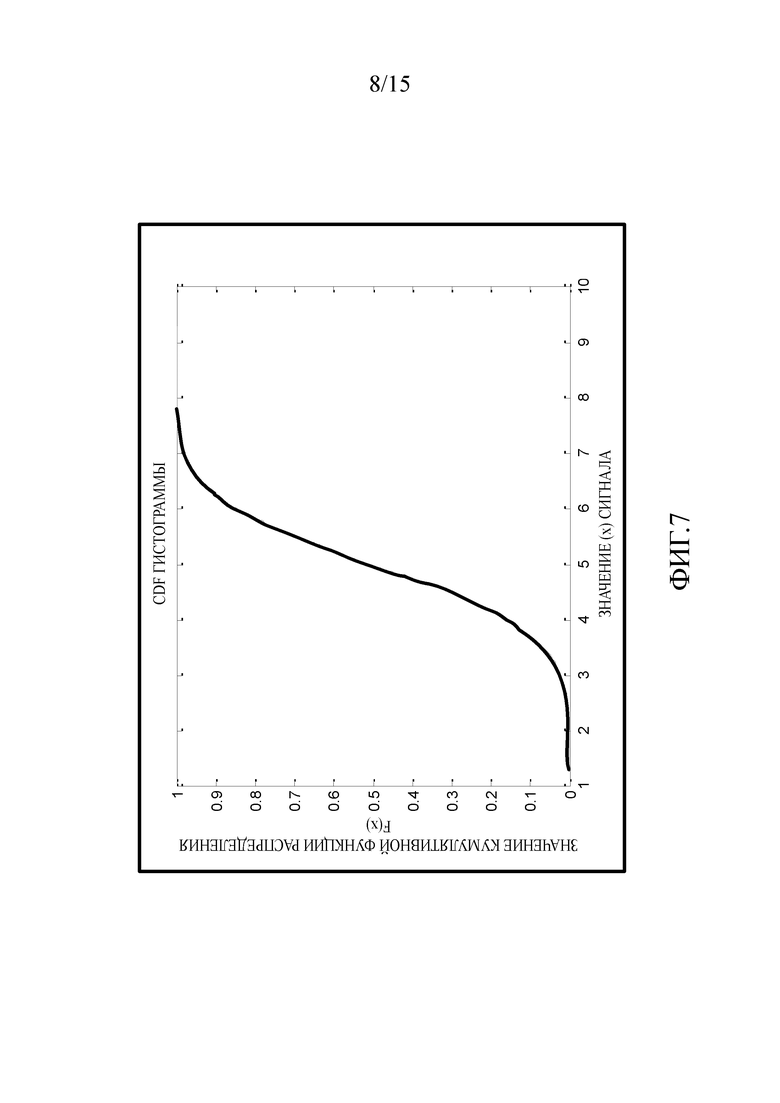
ФИГ. 7 представляет собой график кумулятивной функции распределения, сгенерированный из гистограмм (напр., объединенных значений сигнала), показанных на фиг. 6.
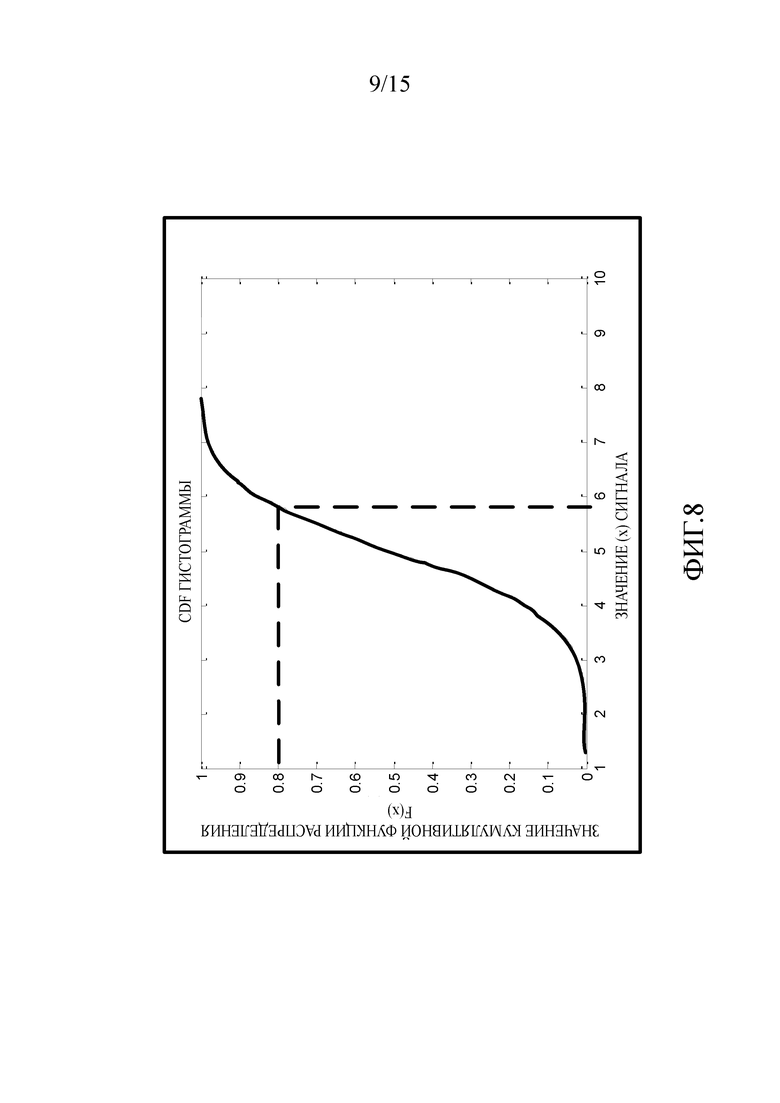
ФИГ. 8 иллюстрирует квантильную функцию, которая может быть использована для идентификации контрольного порогового значения или заданного значения из требуемого целевого показателя.
ФИГУРЫ 9 и 10 иллюстрируют, как можно итерационно выбирать значения сигнала и выбранные целевые показатели для улучшения показателя машины.
ФИГУРЫ 11-13 показывают примеры передвижных устройств.
ФИГ. 14 представляет собой блок-схему одного примера вычислительной среды, которая может быть использована на предшествующих фигурах.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
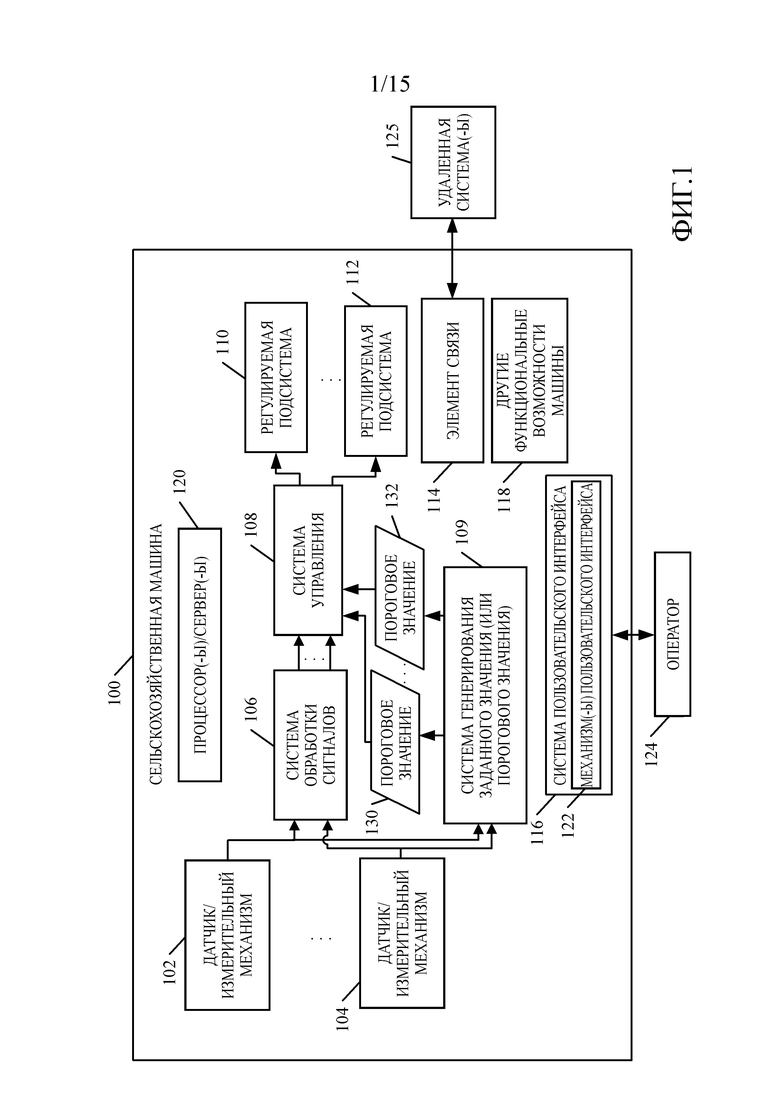
ФИГ. 1 представляет собой блок-схему одного примера сельскохозяйственной машины 100. Машина 100 иллюстративно имеет набор датчиков или измерительных механизмов 102-104. Машина 100 также иллюстративно содержит систему 106 преобразования сигналов, систему 108 управления и набор регулируемых подсистем 110-112. Также она может содержать элемент 114 связи, систему 116 пользовательского интерфейса, и она может содержать множество других функциональных возможностей 118 машины. Машина 100 также показана с одним или более процессорами или серверами 120.
В одном примере система 116 пользовательского интерфейса иллюстративно содержит набор механизмов 122 пользовательского интерфейса. Оператор 124 может взаимодействовать с механизмами 122 пользовательского интерфейса для того, чтобы управлять и манипулировать сельскохозяйственной машиной 100. В одном примере механизмы 122 включают в себя одно или более устройств отображения, аудиоустройств для предоставления звуковой информации, устройств передачи тактильных ощущений, которые обеспечивают обратную связь с передачей тактильных ощущений, рычагов, джойстиков, рулевых колес, педалей, кнопок и т.д. Механизмы 122 пользовательского интерфейса также могут иметь набор механизмов ввода, отображаемых на дисплее пользовательского интерфейса. Например, они могут представлять собой ссылки, иконки или другие управляемые механизмы.
Датчики или измерительные механизмы 102-104 иллюстративно генерируют сигналы, характеризующие измеренные переменные, и предоставляют их в систему 106 преобразования сигналов. Измеренные переменные могут относиться к широкому диапазону различных измеренных переменных, а некоторые из них могут свидетельствовать, насколько хорошо функционирует сельскохозяйственная машина 100. В качестве примера, когда сельскохозяйственная машина 100 представляет собой уборочную машину (такую как комбайн), сигналы могут включать в себя сигнал потери зерна, который показывает количество собранного зерна, теряемого во время уборочного процесса. Они могут включать в себя сигнал пропускной способности, являющиеся показателем количества или скорости материала, пропускаемого через комбайн. Сигналы датчиков могут включать в себя сигнал качества зерна, являющийся показателем количества зерновых примесей (MOG), которое попадает в резервуар для чистого зерна. Сигнал также может показывать качество самого зерна, которое попадает в резервуар для чистого зерна, например, лапается ли оно во время уборочного процесса и т.д. Сигналы могут оценивать (или использоваться для расчета) критерия эффективности использования топлива или критерия эффективности энергопотребления, который является показателем, насколько эффективно работает сельскохозяйственная машина 100 в процессе уборочной операции. Они также могут содержать критерий производительности, который является показателем общей производительности машины в процессе уборочной операции. Эти и ряд других датчиков или измерительных механизмов описаны более подробно ниже по отношению к ФИГ. 2.
Механизм 106 обработки сигналов может выполнять большое множество различных видов обработки сигналов. Например, он может выполнять усиление, линеаризацию, нормализацию, другие типы компенсации или фильтрации и т.д.
Система 108 управления получает сигналы (либо непосредственно от датчиков или измерительных механизмов 102-104, либо после того, как они были преобразованы системой 106) и генерирует набор управляющих сигналов. Управляющие сигналы используются для регулирования различных управляемых подсистем 110-112 на сельскохозяйственной машине 100.
В дополнение, система 109 генерирования заданных (или контрольных пороговых) значений также иллюстративно получает один или более сигналов датчиков или измерений от датчиков или измерительных механизмов 102-104. Опять же, они могут быть получены непосредственно от механизмов 102-104 или от системы 106 преобразования сигналов. Система 109 генерирования заданных (или пороговых) значений генерирует набор контрольных пороговых значений (или контрольных заданных значений) 130-132 (упоминаемых далее, как контрольные пороговые значения или пороговые значения) на основании входных сигналов и предоставляет контрольные пороговые значения 130-132 в систему 108 управления. Система 108 управления иллюстративно генерирует управляющие сигналы для регулирования подсистем 110-112 на основании входных сигналов от датчиков или измерительных механизмов 102-104 и на основании контрольных пороговых значений 130-132. Поэтому, система 108 управления пытается регулировать подсистемы 110-112 таким образом, чтобы показатель машины 100 достигал точки, когда пороговые сигналы датчиков совпадают с контрольными пороговыми значениями 130-132.
Система 109 генерирования заданного порогового значения с перерывами (или непрерывно) и автоматически обновляет контрольные пороговые значения 130-132 до тех пор, пока не улучшится показатель машины 100. Под автоматически подразумевается, что система функционирует без всякого человеческого вмешательства, возможно за исключением начала или разрешения работы. Таким образом, пороговые значения 130-132 автоматически устанавливаются и динамически обновляются. Итерационный процесс данного типа управляет улучшением показателя машины 100 до тех пор, пока не стабилизируются пороговые значения. Это описано более подробно ниже в отношении фигур 3 и 4.
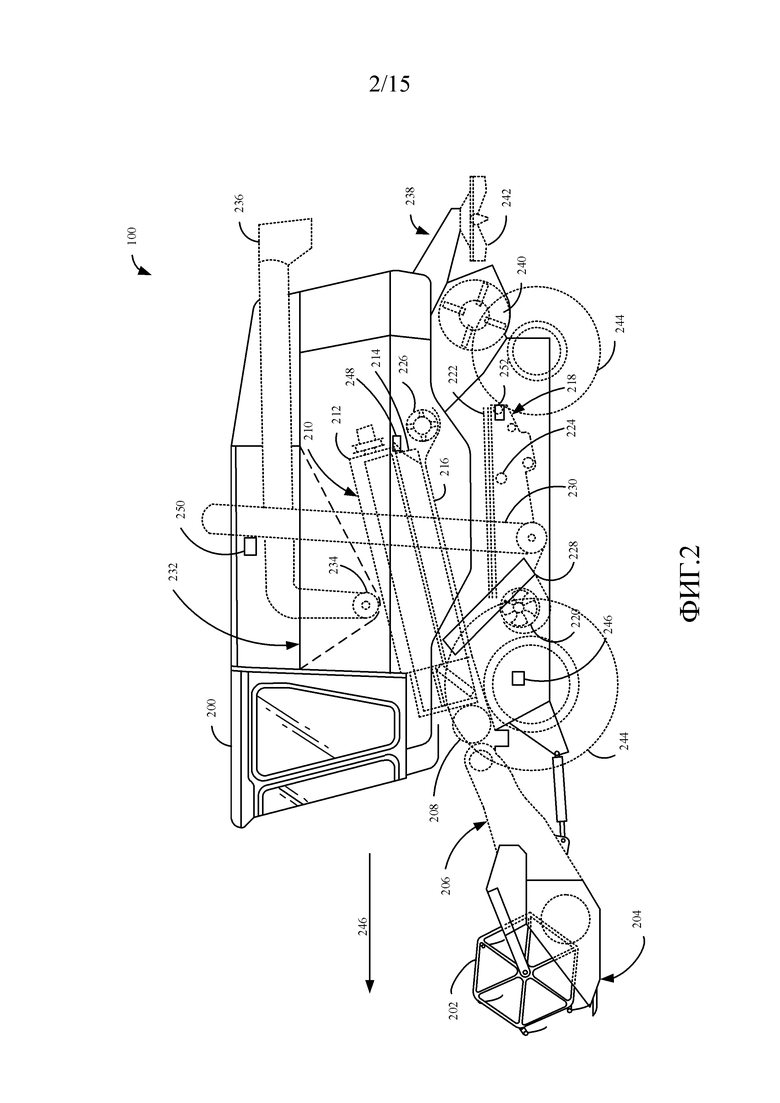
ФИГ. 2 представляет собой частично графическую, частично схематичную иллюстрацию сельскохозяйственной машины 100 на примере, когда машина 100 представляет собой комбайн. На фиг. 2 можно видеть, что комбайн 100 иллюстративно содержит отделение 200 оператора и набор фронтального оборудования, которое может содержать жатку 202 и измельчающий аппарат, показанный в общем под номером 204. Также она может содержать приемную камеру молотилки 206, ускоритель 208 подачи и молотилку, показанную в общем под номером 210. Молотилка 210 иллюстративно содержит молотильный ротор 212 и набор секций 214 подбарабанья. Дополнительно, комбайн 100 может содержать сепаратор 216, который содержит ротор сепаратора. Комбайн 102 может содержать подсистему 218 очистки (или зерноочистку), которая сама может содержать очистной вентилятор 220, мякинное решето 222 и сито 224. Подсистема обработки материала в комбайне 102 может содержать (в дополнение к приемной камере молотилки 206 и ускорителю 208 подачи) выгрузной битер 226, колосоподъемник 228, подъемник 230 чистого зерна (который перемещает чистое зерно в резервуар 232 для чистого зерна), а также разгрузочный шнек 234 и выгрузной рукав 236. Комбайн 102 может дополнительно содержать подсистему 238 остатков, которая может содержать измельчитель 240 и разбрасыватель 242. Комбайн 102 также может иметь двигательную подсистему, которая содержит двигатель, который приводит в движение входящие в сцепление с землей колеса 244 или гусеницы и т.д. Следует отметить, что комбайн 102 также может иметь более чем одну любую из подсистем, упомянутых выше (например, левую и правую зерноочистки, сепараторы и т.д.).
Во время работы и в качестве обзора, комбайн 102 иллюстративно движется по полю в направлении, показанном стрелкой 246. По мере его передвижения жатка 202 зацепляет сельскохозяйственную культуру, подлежащую уборке, и собирает ее в направлении измельчающего аппарата 204. После ее срезания она передвигается по транспортеру в приемной камере молотилки 206 в направлении ускорителя 208 подачи, который ускоряет сельскохозяйственную культуру в молотилку 210. Сельскохозяйственная культура обмолачивается ротором 212, вращающим сельскохозяйственную культуру о подбарабанье 214. Обмолоченная сельскохозяйственная культура перемещается ротором сепаратора в сепараторе 216, где некоторая часть остатков перемещается выгрузным битером 226 в направлении подсистемы 238 остатков. Они могут измельчаться измельчителем 240 остатков и распределяться по полю разбрасывателем 242. В других вариантах исполнения вместо измельчения и распределения остатки просто падают в рядок.
Зерно падает в зерноочистку (или подсистему очистки) 218. Мякинное решето 222 отделяет от зерна некоторую часть более крупного материала, а сито 224 отделяет от чистого зерна некоторую часть более мелкого материала. Чистое зерно падает на шнек в подъемнике 230 чистого зерна, который перемещает чистое зерно вверх и помещает его в резервуар 232 для чистого зерна. Остатки могут удаляться из зерноочистки 218 воздушным потоком, генерируемым очистным вентилятором 220. Данные остатки также могут перемещаться в комбайне 102 назад в направлении подсистемы 238 обработки остатков.
Недомолоченные колосья могут перемещаться колосоподъемником 228 назад в молотилку 210, где они могут повторно обмолачиваться. В качестве альтернативы, недомолоченные колосья также могут проходить в отдельный механизм повторного обмолота (также с использованием колосоподъемника или другого механизма транспортировки), где они также могут повторно обмолачиваться.
ФИГ. 2 также показывает, что в одном примере комбайн 102 может содержать датчик 246 скорости относительно земли, один или более датчиков 248 потерь в сепараторе, камеру 250 чистого зерна и один или более датчиков 252 потерь в зерноочистке. Датчик 246 скорости относительно земли иллюстративно определяет скорость передвижения комбайна 102 по земле. Это может быть сделано путем определения скорости вращения колес, ведущего вала, оси или других элементов. Скорость передвижения также может быть измерена с помощью системы позиционирования, такой как глобальная система позиционирования (GPS), система счисления пути, радионавигационная система LORAN или большое множество других систем или датчиков, которые обеспечивают индикацию скорости передвижения.
Датчики 252 потерь в зерноочистке иллюстративно предоставляют выходной сигнал, являющийся показателем количества потерь зерна как с правой, так и с левой сторон зерноочистки 218. В одном примере датчиками 252 являются датчики удара, которые подсчитывают удары зерен в единицу времени (или в единицу пройденного расстояния), обеспечивая индикацию потерь зерна в зерноочистке. Датчики удара для правой и левой сторон зерноочистки могут предоставлять индивидуальные сигналы или объединенный или совокупный сигнал. Следует отметить, что датчики 252 также могут содержать только единственный датчик, вместо отдельных датчиков для каждой зерноочистки.
Датчик 248 потерь в сепараторе предоставляет сигнал, являющийся показателем потерь зерна в левом и правом сепараторах. Датчики, связанные с левым и правым сепараторами, могут предоставлять отдельные сигналы потери зерна или объединенный или суммарный сигнал. Это может быть сделано также с использованием большого множества различных типов датчиков. Следует отметить, что вместо отдельных левого и правого датчиков датчики 248 потери в сепараторе также могут представлять собой только единственный датчик.
Также следует иметь в виду, что сенсорные/измерительные механизмы 102-104 (в дополнение к уже описанным датчикам) также могут содержать на комбайне 100 другие датчики. Например, они могут содержать датчик состояния машины, который выполнен с возможностью определения, выполнена ли машина 100 с возможностью измельчения остатков, формирования рядка и т.д. Они могут содержать датчики скорости вентилятора зерноочистки, которые могут быть выполнены непосредственно на вентиляторе 220 для определения скорости вентилятора. Они могут содержать датчик влажности зерновых примесей (MOG), который может быть выполнен с возможностью определения уровня влажности зерновых примесей, которые проходят через машину 100. Они могут содержать датчики настройки машины, которые выполнены с возможностью определения различных конфигурируемых настроек на машине 100. Они также могут содержать датчик ориентации машины, которым может быть любой из большого множества различных типов датчиков, которые определяют ориентацию машины 100. Датчики свойств сельскохозяйственной культуры могут определять множество различных типов свойств сельскохозяйственной культуры, таких как тип сельскохозяйственной культуры, влажность сельскохозяйственной культуры и другие свойства сельскохозяйственной культуры. Они также могут быть выполнены с возможностью определения характеристик сельскохозяйственной культуры по мере того, как она обрабатывается машиной 100. Например, они могут определять скорость подачи зерна по мере того, как оно проходит через подъемник 230 чистого зерна. Они могут определять удельный массовый расход через подъемник 230 или предоставлять другие выходные сигналы, являющиеся показателем аналогичных переменных. Некоторые дополнительные примеры типов датчиков, которые могут быть использованы, описаны ниже в отношении ФИГ. 3.
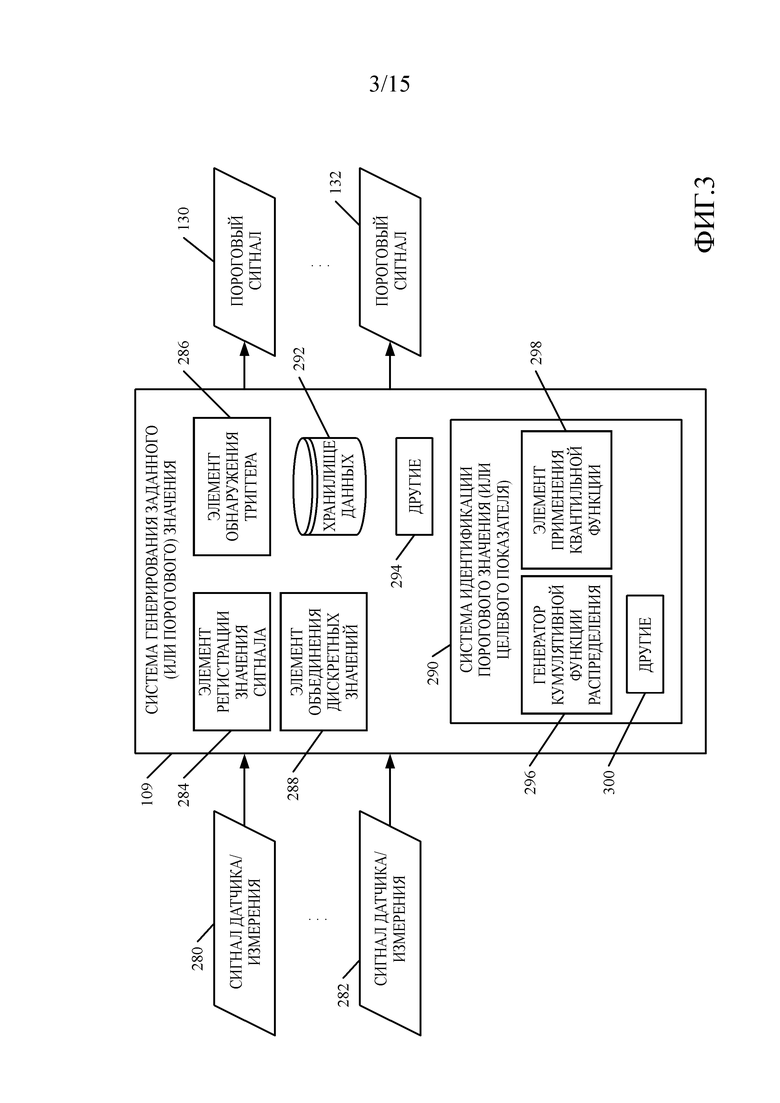
ФИГ. 3 представляет собой блок-схему, более подробно показывающую один пример системы 109 генерирования заданного порогового значения. ФИГ. 3 показывает, что система 109 иллюстративно получает сигналы 280-282 датчиков от различных датчиков или измерительных механизмов 102-104. Она генерирует пороговые заданные значения 130-132 и предоставляет их в систему 108 управления.
В примере, показанном на фиг. 3, система 109 иллюстративно содержит элемент 284 регистрации значения сигнала, элемент 286 обнаружения запуска, элемент 288 объединения дискретных значений, систему 290 идентификации пороговых значений, хранилище 292 данных, и она может содержать другие пункты 294. Система 290 идентификации пороговых значений иллюстративно содержит генератор 296 кумулятивной функции распределения, элемент 298 применения квантильной функции, и она может содержать другие пункты 300.
Элемент 286 обнаружения запуска иллюстративно идентифицирует, когда условия запуска выполнены, чтобы система 109 запуска идентифицировала новый набор пороговых значений. Элемент 284 регистрации значения сигнала иллюстративно регистрирует получаемые дискретные значения сигнала 280-282. Это может делаться с перерывами на протяжении заданного периода времени, или это может делаться непрерывно. Элемент 288 объединения дискретных значений объединяет дискретные значения, которые были зарегистрированы, в группы, а генератор 296 кумулятивной функции распределения применяет к данным значениям кумулятивную функцию распределения, которая накладывает значения на целевые показатели. Элемент 298 применения квантильной функции применяет квантильную функцию для идентификации конкретного порогового значения на основании выбранного целевого показателя, и выводит данное значение в качестве сигнала 130-132 порогового значения, который отображает значение. Хранилище 292 данных может быть использовано для хранения зарегистрированных значений сигнала, объединенных значений или любых значений, сгенерированных системой 290, или другой информации.
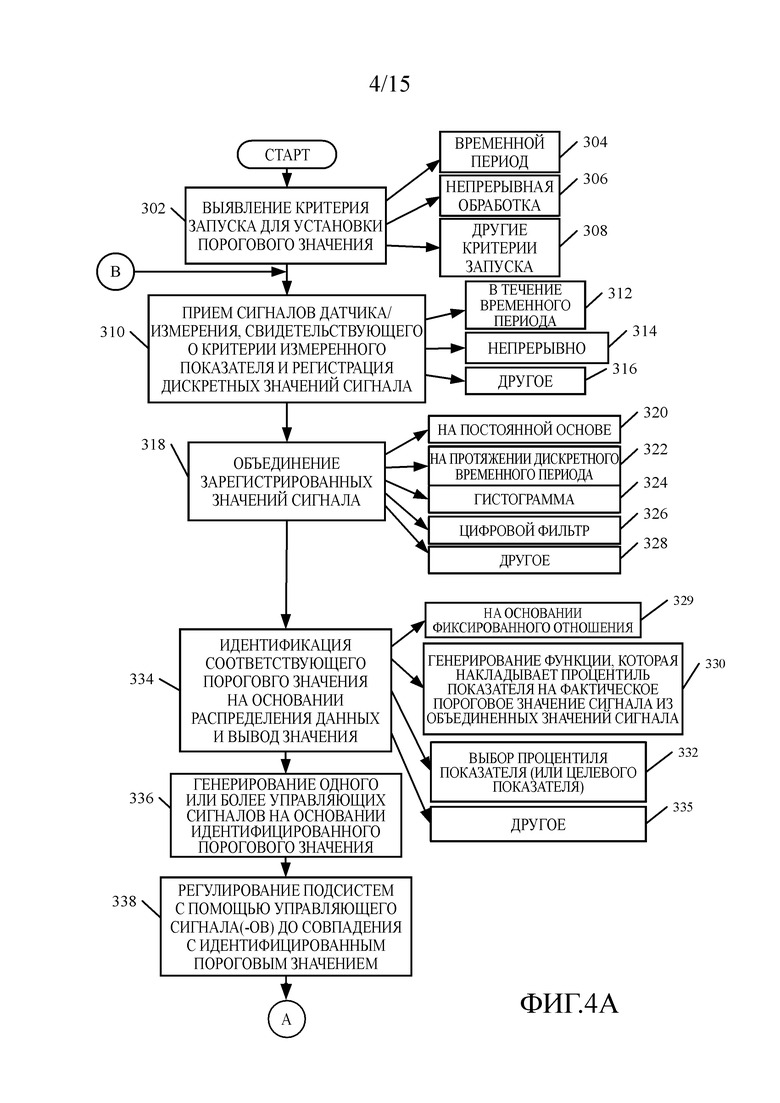
ФИГ. 4A и 4B (совместно упоминаемые в данном документе, как ФИГ. 4) показывают технологическую схему, иллюстрирующую один пример работы системы 109 генерирования пороговых значений и системы 108 управления. Элемент 286 обнаружения запуска сперва выявляет критерии запуска для настройки порогового значения, которое может быть использовано системой 108 управления. Это показано в блоке 302 на фиг. 4. Критериями запуска могут быть любые из множества различных типов критериев. Например, пороговые значения могут рассчитываться на периодической основе или на иной прерывистой основе. Таким образом, прохождение временного периода 304 может инициировать показ элементом 286 обнаружения, что имеются критерии запуска. В качестве альтернативы, обработка может проходить непрерывно, на постоянной основе. Вследствие этого, критериями запуска может быть просто, что передвижная машина работает. Непрерывная обработка показана в блоке 306. Критериями запуска также может быть большое множество других критериев 308 запуска.
После того, как критерии запуска выполнены, тогда элемент 284 регистрации значения сигнала иллюстративно получает сигналы датчиков или сигналы измерений, которые свидетельствуют о критерии показателя для машины 100, и регистрирует дискретные значения сигнала для данного сигнала. Это показано в блоке 310.
ФИГ. 5, например, показывает один пример значения сигнала датчика. Для целей представленного примера предположим, что сигнал, показанный на фиг. 5, отображает измеренные потери зерна. ФИГ. 5 показывает, что значение сигнала колеблется между приблизительно 2 и приблизительно 8 на протяжении 4,000 секундного временного периода. Так как сигнал отображает потери зерна, чем ниже сигнал, тем лучше функционирует комбайн 100.
В одном примере элемент 284 регистрации значения сигнала регистрирует сигнал или регистрирует индивидуальные или дискретные значения сигнала на протяжении заданного временного периода. Регистрация сигнала в течение временного периода показана в блоке 312. В качестве альтернативы, сигнал может регистрироваться непрерывно, как показано в блоке 314. Также сигнал может регистрироваться иным образом, и это показано в блоке 316.
Затем элемент 288 объединения дискретных значений объединяет дискретные значения, которые регистрируются для входного сигнала по категориям. Это показано в блоке 318 на фиг. 4. В одном примере сигналы объединяют по категориям на постоянной основе. Вследствие этого, текущие сигналы, которые объединяют по категориям, могут заменять более старые сигналы, которые ранее добавлялись в категории. Это показано в блоке 320. В качестве альтернативы, сигналы могут объединяться в течение дискретного временного периода, когда не рассматривается повторяющаяся информация. Это показано в блоке 322.
Объединение может выполняться с использованием гистограмм 324. То есть, значения сигнала могут помещаться в гистограмму. Таким образом, диапазон значений делится на последовательные секции непересекающихся интервалов измеренной переменной, а затем количество чисел дискретных значений сигнала, зарегистрированных на протяжении заданного временного периода, которое попадает в каждую секцию, отображается гистограммой. Гистограмма также может быть нормализована таким образом, что каждый столбик в гистограмме показывает долю значений, которая попадает в каждую секцию, при этом сумма всех секций (или высот) равна 1. Это показывает относительную частоту значений, попадающих в каждую секцию. Значения сигнала могут быть объединены по категориям с использованием цифрового фильтра 326, а также другими способами 328.
ФИГ. 6 показывает один пример гистограммы, которая сгенерирована из дискретных значений сигнала, полученных для сигнала, показанного на фиг. 5. Можно видеть, что гистограмма делит диапазон значений сигнала на последовательные секции непересекающихся интервалов измеренного сигнала, при этом каждый интервал составляет приблизительно 0,14 единиц значения сигнала (напр., если значение сигнала измеряется в Вольтах, тогда каждая секция отображает 0,14 Вольт). Количество попаданий в каждую секцию колеблется от 0 до приблизительно 250. Распределение гистограммы вдоль оси значений сигнала отображает шум сигнала.
Затем система 290 идентификации пороговых значений идентифицирует пороговое значение сигнала, (на основании распределения объединенных значений сигнала) и выводит его для регулирования подсистем комбайна 100. Это показано в блоке 334. В одном примере пороговое значение идентифицируют за счет использования постоянного отношения или другого критерия относительно распределения данных (например, одно или два стандартных отклонений и т.д.). Это показано в блоке 329.
Пороговое значение также может быть идентифицировано другими способами. Например, в одном примере генератор 296 кумулятивной функции распределения генерирует функцию из гистограммы, показанной на фиг. 6, которая накладывает процентиль показателя на фактическое пороговое значение сигнала из объединенных значений сигнала на гистограмме. Это показано в блоке 330. Генератор 296 функции, например, может интегрировать по гистограмме, показанной на фиг. 6, для генерирования кумулятивной функции распределения. Один пример этого показан на фиг. 7.
На фиг. 7 можно видеть, что кумулятивная функция распределения f(x) на оси y представляет собой интеграл значений на гистограмме, показанной на фиг. 6. Она также накладывает значения кумулятивной функции распределения на оси y на фактические значения сигнала (или контрольные пороговые значения) на оси x. Таким образом, для того чтобы идентифицировать пороговое значение для управления комбайном 100, элемент 298 применения квантильной функции сперва выбирает значение на оси y, которое представляет процентиль показателя (или целевой показатель), а затем идентифицирует соответствующее пороговое значение на оси x и выводит данное значение. Выбор процентиля показателя показан в блоке 332 на фиг. 4. ФИГ. 8 показывает один пример этого.
В примере, показанном на фиг. 8, можно видеть, что процентиль показателя (или значение кумулятивной функции распределения на оси y) выбрано, как 0,8. Он отражает значение сигнала на оси x, равное приблизительно 5,8. Таким образом, система 109 предоставляет значение, равное 5,8, как пороговое значение для данного входного сигнала, который измеряет потери зерна. Данный сигнал предоставляется в систему 108 управления.
Пороговое значение также может быть идентифицировано другими способами. Это показано в блоке 335.
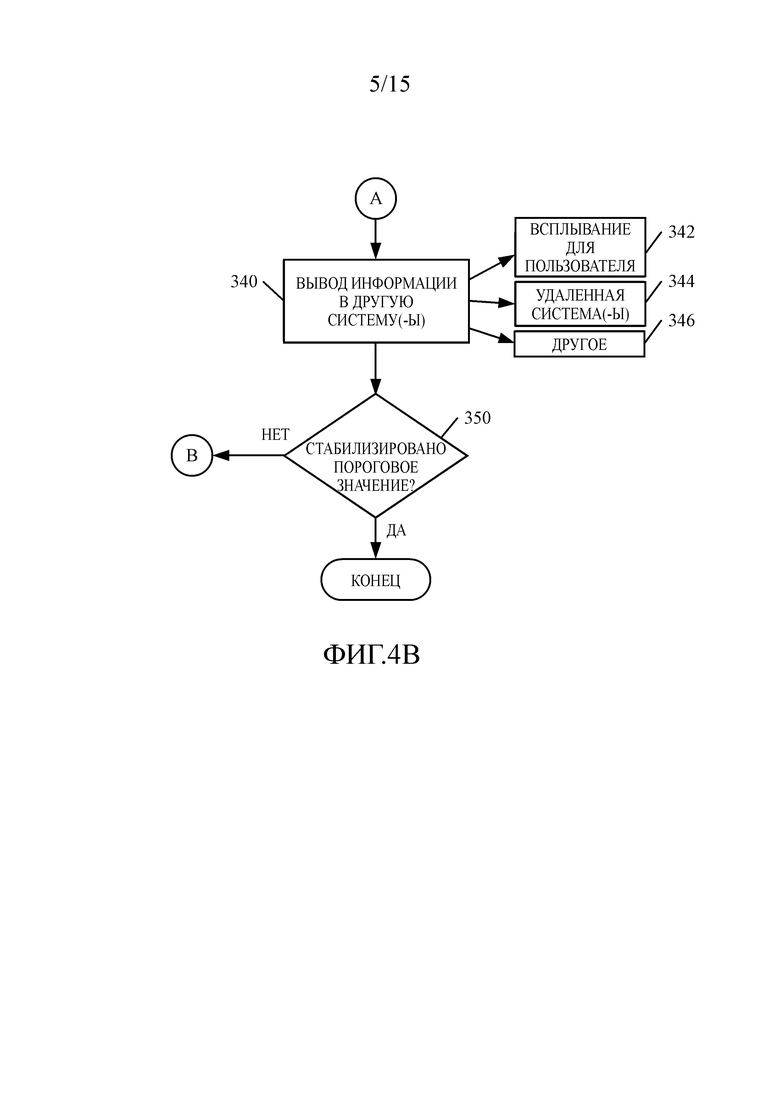
Затем система 108 управления на основании идентифицированного порогового значения генерирует один или более управляющих сигналов. Это показано в блоке 336. Она использует управляющий сигнал для регулирования таким образом, чтобы одна или более подсистем соответствовала идентифицированному пороговому значению (которое соответствует идентифицированному целевому показателю). Это показано в блоке 338. Она также может выводить любую информацию, которая была использована, наряду с самим пороговым значением, в другие системы. Это показано в блоке 340. Например, она может выводить информацию в систему 116 пользовательского интерфейса, чтобы она всплывала для пользователя. Это показано в блоке 342. Она может выводить информацию в удаленные системы 125 с использованием элемента 114 связи. Это показано в блоке 344. Она может выводить ее также другими способами. Это показано в блоке 346.
За счет выбора порогового значения (которое отображает целевой показатель) для системы 108 управления, а затем предоставления системе 108 управления возможности регулирования подсистем 110-112 таким образом, чтобы они соответствовали данному целевому показателю, система 108 управления будет непрерывно проводить улучшение управления сельскохозяйственной машиной 100 до тех пор, пока не будет стабилизирован целевой показатель (соответствующее пороговое значение). Например, после того, как для системы 108 управления установлено пороговое значение, равное 5,8 (которое соответствует целевому показателю 80-го процентиля), и система 108 управления регулирует подсистемы 110-112, чтобы они совпадали с данным целевым показателем, тогда обработка может снова вернуться в блок 302, где рассчитывается новый целевой показатель.
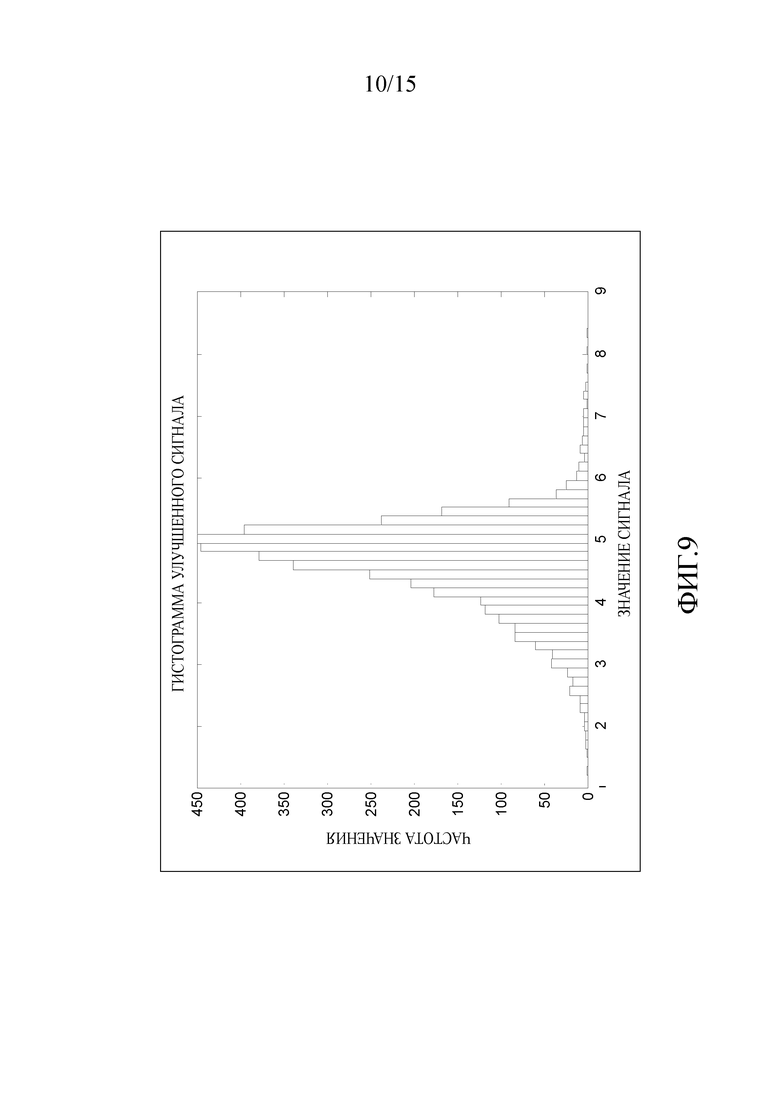
Снова может быть получен сигнал, а дискретные значения могут быть зарегистрированы и объединены в гистограмму. ФИГ. 9 показывает один пример подобной гистограммы. Частота дискретных значений сигнала, которые выше порогового сигнала (и, следовательно, тех значений сигнала, которые отображают показатель, который хуже, чем целевой показатель) значительно уменьшается относительно частоты значений, показанных на фиг. 6. Таким образом, когда к гистограмме, показанной на фиг. 9, прикладывают кумулятивную функцию распределения, и снова выбирают 80-ый процентиль показателя, тогда соответствующий пороговый сигнал будет меньше, чем 5,8. В примере, показанном на фиг. 9, он может быть немного меньше чем 5,0. Он снова выводится в систему 108 управления в качестве нового контрольного порогового значения, и система 108 управления продолжает регулировать управляемые подсистемы 110-112 таким образом, чтобы они соответствовали новому, и лучшему, целевому показателю. За счет итерации, данный процесс обеспечивает системе 108 управления возможность непрерывного улучшения работы сельскохозяйственной машины 100 в отношении идентифицируемых целевых показателей до тех пор, пока не будут стабилизированы пороговые значения. То есть она продолжает улучшать работу сельскохозяйственной машины 100 до тех пор, пока целевые показатели больше не будут понижаться, или больше не будут понижаться от одной итерации до следующей на величину порогового значения.
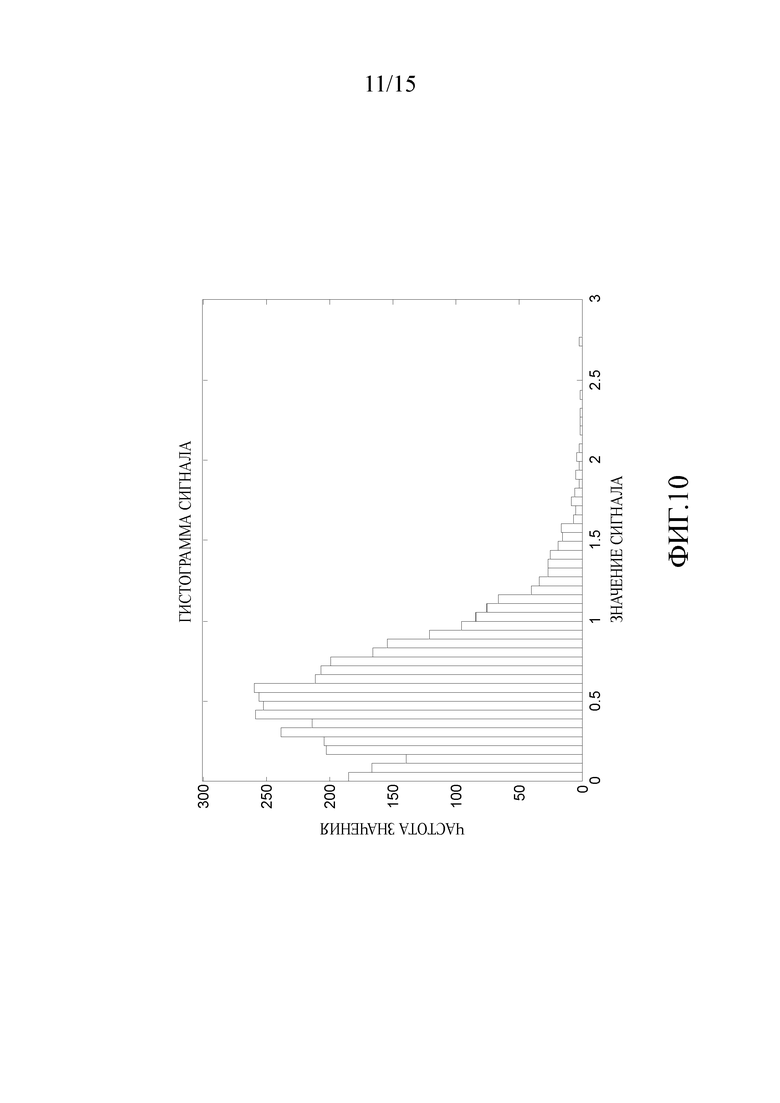
ФИГ. 10 представляет собой гистограмму, показывающую один пример значений сигнала после того, как система 109 несколько раз выполнила итерацию посредством данного процесса. Можно видеть, что значения сигнала значительно уменьшились, и таким образом показатель машины 100 по отношению к данным значениям сигналов (напр., в отношении измеренных потерь зерна) значительно повысился. Таким образом, за счет проведения итерации с помощью процесса настройки новых целевых показателей для каждого сигнала, а затем регулирования подсистем на соответствие данным новым целевым показателям, показатель машины продолжает улучшаться до тех пор, пока данные целевые показатели не будут стабилизированы.
Также следует отметить, что в примере, описанном выше, сигнал, который свидетельствует о целевом показателе, представляет собой сигнал потери зерна. Вследствие этого, чем ниже сигнал, тем лучше показатель машины 100 в отношении к потере зерна. Однако сигналом может быть сигнал, в котором улучшение отображается более высоким числом, вместо более низкого числа. В качестве примера, если сигнал отображает пропускную способность или эффективность использования топлива, может так случиться, что более высокие числа отображают улучшение. В этом случае за счет проведения итерации в приведенном выше процессе, система 108 управления будет регулировать показатель машины 100 таким образом, что уровни сигнала продолжают повышаться (и таким образом представляют улучшенный показатель) таким же образом, чтобы сигнал, описанный выше, продолжал понижаться (и таким образом отображал улучшенный показатель) до тех пор, пока сигнал не будет стабилизирован. Продолжение проведения итерации посредством установки новых целевых показателей (или пороговых уровней) до тех пор, пока они не будут стабилизированы, показано в блоке 350 на фиг. 4.
В представленном обсуждении упоминались процессоры и серверы. В одном примере процессоры и серверы включают компьютерные процессоры со связанной памятью и схемой синхронизации, отдельно не показанной. Они представляют собой функциональные части систем или устройств, к которым они относятся, и приводятся в действе другими элементами или средствами в данных системах, и способствуют их функциональным возможностям.
Также, обсуждается количество дисплеев пользовательского интерфейса. Они могут принимать большое множество различных форм и могут иметь большое множество различных управляемых пользователем механизмов ввода, расположенных на них. Например, управляемыми пользователем механизмами ввода могут быть текстовые окна, окошки метки, иконки, ссылки, выпадающие меню, поисковые окна и т.д. Они также могут приводиться в действие с помощью большого множества различных способов. Например, они могут приводиться в действие с использованием указательного устройства (такого как шаровой манипулятор или мышь). Они могут приводиться в действие с использованием аппаратных кнопок, переключателей, джойстика или клавиатуры, клавишных переключателей или вогнутых кнопок, нажимаемых большим пальцем, и т.д. Они также могут приводиться в действие с использованием виртуальной клавиатуры или других виртуальных исполнительных механизмов. В дополнение, когда экран, на котором они отображаются, представляет собой чувствительный к прикосновению экран, они могут приводиться в действие с использованием сенсорных жестов. Также, когда устройство, которое их отображает, имеет элементы распознавания речи, они могут приводиться в действие с использованием голосовых команд.
Также обсуждается ряд хранилищ данных. Следует отметить, что каждое из них может быть разбито на множество хранилищ данных. Все могут быть локальными для систем, имеющим к ним доступ, все могут быть удаленными, или некоторые могут быть локальными, тогда как другие являются удаленными. В данном документе предусмотрены все данные конфигурации.
Также, фигуры показывают ряд блоков с функциями, описанными в каждом блоке. Следует отметить, что может быть использовано меньше блоков, поэтому функции выполняются меньшим числом элементов. Также, может быть использовано больше блоков с функциями, распределенными между большим числом элементов.
Также следует отметить, что информация и целевые показатели могут выводиться в облачную или другую удаленную серверную среду.
Также следует отметить, что элементы фиг. 1 или их части могут располагаться на большом множестве различных устройств. Некоторые из данных устройств включают серверы, настольные компьютеры, переносные компьютеры, планшетные компьютеры или другие мобильные устройства, такие как карманные компьютеры, сотовые телефоны, смартфоны, мультимедиа плееры, карманные персональные компьютеры и т.д.
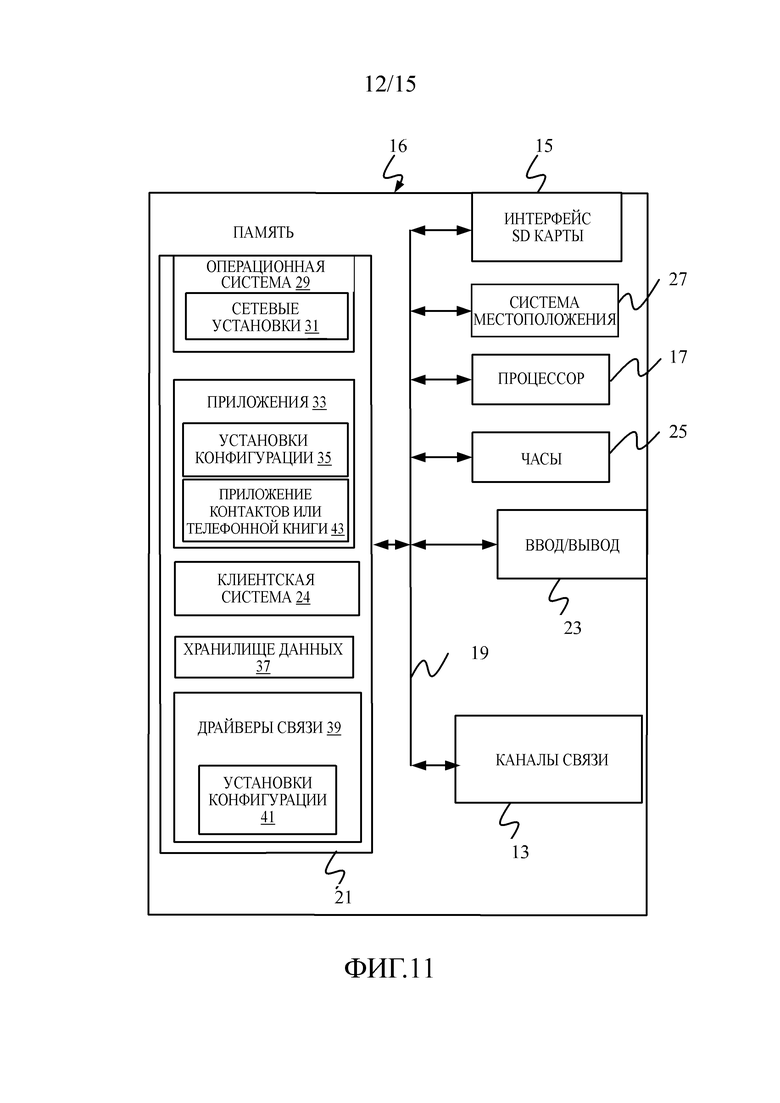
ФИГ. 11 представляет собой упрощенную блок-схему одного иллюстративного примера портативного или мобильного вычислительного устройства, которое может быть использовано в качестве пользовательского или клиентского портативного устройства 16, в котором может быть применена представленная система (или ее части). Например, мобильное устройство может применяться в операторском отделении сельскохозяйственной машины 100 для использования при генерировании, обработке или отображении целевых показателей и других данных. ФИГУРЫ 12-13 представляют собой примеры портативных или мобильных устройств.
ФИГ. 11 предоставляет общую блок-схему элементов клиентского устройства 16, которое может задействовать некоторые элементы, показанные на фиг. 1, которое взаимодействует с ними, или и то и другое. В устройстве 16 предоставлен канал 13 связи, который обеспечивает возможность связи портативного устройства с другими вычислительными устройствами и в некоторых вариантах осуществления обеспечивает канал для получения информации автоматически, например, посредством сканирования. Примеры канала 13 связи включают обеспечение связи через один или более протоколов обмена данными, таких как беспроводные сервисы, используемые для предоставления сотового доступа к сети, а также протоколы, которые предоставляют локальные беспроводные соединения с сетями.
В других примерах могут быть получены приложения на съемной защищенной цифровой (SD) карте, которая соединена с интерфейсом 15. Интерфейс 15 и каналы 13 связи сообщаются с процессором 17 (который также может заключать в себе процессор 120 с ФИГ. 1) по шине 19, которая также соединена с памятью 21 и элементами 23 ввода/вывода (I/O), а также с часами 25 и системой 27 определения местоположения.
В одном варианте осуществления I/O элементы 23 предоставлены для облегчения операций ввода и вывода. I/O элементы 23 для различных вариантов осуществления устройства 16 могут содержать элементы ввода, такие как кнопки, датчики касания, оптические датчики, микрофоны, сенсорные экраны, датчики приближения, датчики ускорений, датчики ориентации, и элементы вывода, такие как устройство отображения, динамик и/или порт принтера. Также могут быть использованы другие I/O элементы 23.
Часы 25 иллюстративно представляют собой элемент часов реального времени, который выводит время и дату. Они также могут, иллюстративно, предоставлять функции синхронизации для процессора 17.
Система 27 определения местоположения иллюстративно содержит элемент, который выводит текущее географическое местоположение устройства 16. Она может представлять собой, например, приемник глобальной системы позиционирования (GPS), радионавигационную систему LORAN, систему счисления пути, сотовую систему триангуляции или другую систему позиционирования. Также она может содержать, например, программное обеспечение картирования или навигационное программное обеспечение, которое генерирует требуемые карты, навигационные маршруты и другие географические функции.
Память 21 хранит операционную систему 29, сетевые настройки 31, приложения 33, настройки 35 конфигурации приложений, хранилище 37 данных, драйверы 39 связи и настройки 41 конфигурации связи. Память 21 может содержать все типы материальных энергозависимых и энергонезависимых машиночитаемых запоминающих устройств. Также она может содержать среду хранения информации компьютера (описана ниже). Память 21 хранит машиночитаемые команды, которые при исполнении процессором 17 заставляют процессор выполнять реализуемые компьютером стадии или функции согласно командам. Также процессор 17 может активироваться другими элементами для облегчения их функционирования.
ФИГ. 12 показывает один вариант осуществления, в котором устройство 16 представляет собой планшетный компьютер 600. На фиг. 12 компьютер 600 показан с экраном 602 отображения пользовательского интерфейса. Экран 602 может представлять собой сенсорный экран или интерфейс с перьевым вводом, который получает входную информацию от пера или стилоса. Он также может использовать экранную виртуальную клавиатуру. Конечно, он также может быть соединен с клавиатурой или с другим устройством ввода информации пользователем посредством подходящего механизма соединения, такого как беспроводная связь или, например, USB порт. Также компьютер 600 может иллюстративно получать также голосовую входную информацию.
ФИГ. 13 показывает, что устройством может быть смартфон 71. Смартфон 71 имеет чувствительный к прикосновению дисплей 73, который отображает иконки или плитки или другие механизмы 75 ввода информации пользователем. Механизмы 75 могут быть использованы пользователем, чтобы задействовать приложения, делать звонки, выполнять операции переноса данных и т.д. В общем смартфон 71 построен на мобильной операционной системе и предлагает более продвинутые вычислительные возможности и возможности подключения, чем традиционный мобильный телефон.
Следует заметить, что возможны другие формы устройств 16.
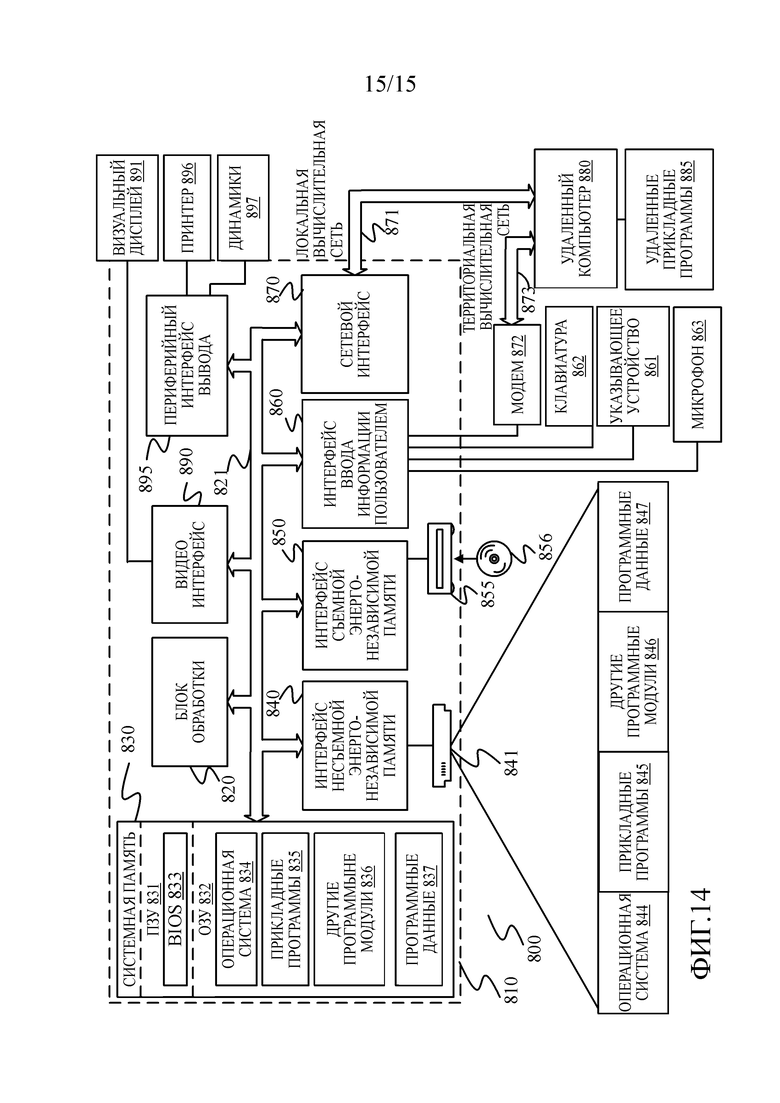
ФИГ. 14 представляет собой один пример вычислительной среды, в котором могут применяться элементы фиг. 1, или (например) ее части. Со ссылкой на ФИГ. 14, иллюстративная система для реализации некоторых вариантов осуществления содержит вычислительное устройство общего назначения в форме компьютера 810. Элементы компьютера 810 могут содержать, но без ограничения, блок 820 обработки (который может содержать процессор 120), системную память 830 и системную шину 821, которая соединяет с блоком 820 обработки различные элементы системы, включая системную память. Системная шина 821 может иметь любую из несколько типов конструкций шины, включая шину памяти или контроллер памяти, периферийную шину и локальную шину с использованием любой из множества архитектур шины. Память и программы, описанные по отношению к ФИГ. 1, могут применяться в соответствующих частях фиг. 14.
Компьютер 810 обычно содержит множество машиночитаемых носителей. Машиночитаемыми носителями могут быть любые доступные носители, которые могут быть доступны для компьютера 810 и представляют собой как энергозависимые, так и энергонезависимые носители, съемные и несъемные носители. В качестве примера, а не ограничения, машиночитаемые носители могут представлять собой компьютерные информационные носители и средства коммуникации. Компьютерные информационные носители отличаются и не содержат модулированного информационного сигнала или несущей волны. Они содержат аппаратные информационные носители, включая как энергозависимые, так и энергонезависимые, как съемные, так и несъемные носители, реализованные посредством любого способа или технологии для хранения информации, такой как машиночитаемые команды, структуры данных, программные модули или другие данные. Компьютерные информационные носители включают, но без ограничения, ОЗУ, ПЗУ, ЭСППЗУ, флеш-память или другую технологию памяти, ПЗУ на компактном диске, цифровые универсальные диски (DVD) или другой оптический дисковый накопитель, магнитные кассеты, магнитную ленту, магнитный дисковый накопитель или другие магнитные запоминающие устройства или любой другой носитель, который может быть использован для хранения требуемой информации и который может быть доступен для компьютера 810. Средства коммуникации могут заключать в себе машиночитаемые команды, структуры данных, программные модули или другие данные в транспортном механизме и содержат любые носители для доставки информации. Термин «модулированный информационный сигнал» означает сигнал, который имеет одну или более характеристик, установленных или измененных таким образом, чтобы кодировать в сигнале информацию.
Системная память 830 содержит компьютерные информационные носители в форме энергозависимой и/или энергонезависимой памяти, такой как постоянное запоминающее устройство (ПЗУ) 831 и оперативное запоминающее устройство (ОЗУ) 832. В ПЗУ 831 обычно хранится базовая система 833 ввода/вывода (BIOS), содержащая основные подпрограммы, которые помогают передавать информацию между элементами внутри компьютера 810, например, в процессе запуска. ОЗУ 832 обычно содержит информационные и/или программные модули, которые непосредственно доступны для блока 820 обработки и/или задействованы им в настоящее время. В качестве примера, а не ограничения, ФИГ. 14 иллюстрирует операционную систему 834, прикладные программы 835, другие программные модули 836 и программные данные 837.
Компьютер 810 также может содержать другие съемные/несъемные энергозависимые/энергонезависимые компьютерные информационные носители. Только в качестве примера, ФИГ. 10 иллюстрирует накопитель 841 для жестких дисков, который считывает или записывает на несъемные, энергонезависимые магнитные носители, накопитель 855 для оптических дисков и энергонезависимый оптический диск 856. Накопитель 841 для жестких дисков обычно соединен с системной шиной 821 посредством интерфейса несъемного запоминающего устройства, такого как интерфейс 840, а накопитель 855 для оптических дисков обычно соединен с системной шиной 821 посредством интерфейса съемного запоминающего устройства, такого как интерфейс 850.
В качестве альтернативы или в дополнение, функциональные возможности, описанные в данном документе, могут выполняться, по меньшей мере частично, с помощью одного или более аппаратных логических элементов. Например, и без ограничения, иллюстративные типы аппаратных логических элементов, которые могут быть использованы, включают программируемые пользователем вентильные матрицы (FPGA), специализированные интегральные микросхемы (напр., ASIC), стандартные продукты, ориентированные на приложения (напр., ASSP), системы на микросхемах (SOC), сложные программируемые логические интегральные схемы (CPLD) и т.д.
Накопители и связанные с ними компьютерные информационные носители, обсуждавшиеся выше и проиллюстрированные на фиг. 14, обеспечивают хранение машиночитаемых команд, структур данных, программных модулей и других данных для компьютера 810. На фиг. 14, например, накопитель 841 на жестком диске проиллюстрирован в виде запоминающей операционной системы 844, прикладных программ 845, других программных модулей 846 и программных данных 847. Следует заметить, что данные элементы могут быть либо такими же, накопитель отличаться от операционной системы 834, прикладных программ 835, других программных модулей 836 и программных данных 837.
Пользователь может вводить команды и информацию в компьютер 810 через устройства ввода, такие как клавиатура 862, микрофон 863 и указывающее устройство 861, такое как мышь, шаровой манипулятор или сенсорная панель. Другие устройства ввода (не показанные) могут включать джойстик, игровой манипулятор, спутниковую антенну, сканер и тому подобное. Эти и другие устройства ввода часто соединены с блоком 820 обработки через интерфейс 860 ввода информации пользователем, который соединен с системной шиной, но может быть соединен посредством другого интерфейса и конструкций шины. Визуальное устройство 891 отображения или устройство отображения другого типа также соединено с системной шиной 821 через интерфейс, такой как видео интерфейс 890. В дополнение к монитору, компьютеры также могут содержать другие периферийные устройства вывода, такие как динамики 897 и принтер 896, которые могут быть соединены через периферийный интерфейс 895 вывода.
Компьютер 810 задействован в сетевом окружении с использованием логических соединений (таких как локальная вычислительная сеть - LAN, или территориальная вычислительная сеть WAN) с одним или более удаленными компьютерами, такими как удаленный компьютер 880.
При использовании в сетевом окружении LAN компьютер 810 соединяют с LAN 871 через сетевой интерфейс или адаптер 870. При использовании в сетевом окружении WAN компьютер 810 обычно содержит модем 872 или другое средство для установления связей в WAN 873, такой как интернет. В сетевом окружении программные модули могут храниться на удаленном запоминающем устройстве. ФИГ. 14 иллюстрирует, например, что удаленные прикладные программы 885 могут находиться на удаленном компьютере 880.
Также следует отметить, что различные варианты осуществления, описанные в данном документе, могут быть объединены различными способами. То есть, части одного или более вариантов осуществления могут быть объединены с частями одного или более других вариантов осуществления. Все этого предусмотрено в данном документе.
Примером 1 является сельскохозяйственная машина, содержащая:
набор регулируемых подсистем, каждая из которых выполняет функцию машины;
множество датчиков, каждый из которых определяет соответствующую переменную в заданной одной из регулируемых подсистем и генерирует сигнал датчика, являющийся показателем значения соответствующей переменной;
систему генерирования контрольного порогового значения, которая принимает сигнал заданного датчика, получает набор значений сигнала датчика, являющихся показателем значений сигнала заданного датчика на протяжении периода времени, и автоматически генерирует контрольный пороговый сигнал с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика; и
систему управления, которая генерирует сигнал регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала заданного датчика и на основании контрольного порогового сигнала.
Примером 2 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой система генерирования контрольного порогового значения включает:
элемент, регистрирующий значение сигнала, который регистрирует набор значений сигнала датчика в виде дискретных значений сигнала датчика, в различные точки времени, на протяжении периода времени.
Примером 3 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой система генерирования контрольного порогового значения включает:
элемент объединения дискретных значений, который объединяет дискретные значения сигнала датчика в группы значений.
Примером 4 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой элемент объединения дискретных значений содержит:
элемент генерирования гистограммы, который генерирует представление в виде гистограммы дискретных значений сигнала датчика.
Примером 5 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой элемент объединения дискретных значений содержит:
цифровой фильтр, который идентифицирует репрезентативное значение в каждой группе значений.
Примером 6 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой система генерирования контрольного порогового значения включает:
систему идентификации порогового значения, которая идентифицирует пороговое значение контрольного порогового сигнала на основании объединенных дискретных значений сигнала датчика.
Примером 7 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой система идентификации порогового значения содержит:
генератор кумулятивной функции распределения, который генерирует кумулятивную функцию распределения на основании объединенных значений сигнала датчика, которая соотносит набор критериев показателей с набором пороговых значений.
Примером 8 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой система идентификации порогового значения содержит:
элемент применения квантильной функции, который идентифицирует пороговое значение для контрольного порогового сигнала на основании выбранного критерия показателя с использованием соотнесения набора критериев показателей с набором пороговых значений.
Примером 9 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой система генерирования контрольного порогового значения и система управления выполнены с возможностью итерационной генерации контрольного порогового сигнала с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика, и генерации сигнала регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала заданного датчика и на основании контрольного порогового сигнала до тех пор, пока пороговое значение не будет изменяться от одной итерации до следующей итерации меньше, чем на пороговую величину.
Примером 10 является сельскохозяйственная машина по любому или всем предшествующим примерам, в которой система генерирования контрольного порогового значения принимает сигнал заданного датчика, получает набор значений сигнала датчика, являющихся показателем значений сигнала заданного датчика на протяжении периода времени, на постоянной основе, и автоматически генерирует контрольный пороговый сигнал с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика.
Примером 11 является сельскохозяйственная машина по любому или всем предшествующим примерам, при этом сельскохозяйственная машина представляет собой комбайн, и при этом набор регулируемых подсистем включает:
подсистему обмолота;
подсистему фронтального оборудования;
подсистему манипулирования остатками;
двигательную подсистему;
подсистему очистки;
подсистему обработки материала; и
подсистему разделения.
Пример 12 представляет собой способ управления сельскохозяйственной машиной, включающий:
определение переменной на заданной одной из множества различных регулируемых подсистем на сельскохозяйственной машине;
генерирование сигнала датчика, являющегося показателем значения переменной;
получение набора значений сигнала датчика, являющихся показателем значений сигнала датчика на протяжении периода времени;
автоматическое генерирование контрольного порогового сигнала с пороговым значением, основанным на наборе значений сигнала датчика для сигнала датчика; и
генерирование сигнала регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала датчика и на основании контрольного порогового сигнала.
Пример 13 представляет собой способ по любому или всем предшествующим примерам, в котором получение набора значений сигнала датчика включает:
сохранение набора значений сигнала датчика в виде дискретных значений сигнала датчика, в различные точки времени, на протяжении периода времени.
Пример 14 представляет собой способ по любому или всем предшествующим примерам, в котором автоматическое генерирование порогового значения управляющего сигнала включает:
объединение дискретных значений сигнала датчика в группы значений; и
идентификация порогового значения контрольного порогового сигнала на основании объединенных дискретных значений сигнала датчика.
Пример 15 представляет собой способ по любому или всем предшествующим примерам, в котором объединение дискретных значений сигнала датчика включает:
генерирование представления дискретных значений сигнала датчика в виде гистограммы.
Пример 16 представляет собой способ по любому или всем предшествующим примерам, в котором идентификация порогового значения включает:
соотнесение набора критериев показателей с набором пороговых значений на основании объединенных значений сигнала датчика; и
идентификацию порогового значения для контрольного порогового сигнала на основании выбранного критерия показателя с использованием соотнесения набора критериев показателей с набором пороговых значений.
Пример 17 представляет собой способ по любому или всем предшествующим примерам и дополнительно включающий:
итерационное генерирование контрольного порогового сигнала с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика, и генерирование сигнала регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала заданного датчика и на основании контрольного порогового сигнала до тех пор, пока пороговое значение не стабилизируется.
Пример 18 представляет собой способ по любому или всем предшествующим примерам, при этом сельскохозяйственная машина представляет собой комбайн, и при этом генерирование сигнала регулирования подсистемы и регулирование набора регулируемых подсистем включает регулирование по меньшей мере одной из подсистемы обмолота, подсистемы очистки, подсистемы фронтального оборудования, подсистемы обработки остатков, двигательной подсистемы, подсистемы обработки материала и подсистемы разделения.
Пример 19 представляет собой комбайн, содержащий:
набор регулируемых подсистем, каждая из которых выполняет функцию на комбайне;
множество датчиков, каждый из которых определяет соответствующую переменную в заданной одной из регулируемых подсистем и генерирует сигнал датчика, являющийся показателем значения соответствующей переменной;
систему генерирования контрольного порогового значения, которая принимает сигнал заданного датчика, получает набор значений сигнала датчика, являющихся показателем значений сигнала заданного датчика на протяжении периода времени, и автоматически генерирует контрольный пороговый сигнал с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика; и
систему управления, которая генерирует сигнал регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала заданного датчика и на основании контрольного порогового сигнала.
Примером 20 является комбайн по любому или всем предшествующим примерам, в котором система генерирования контрольного порогового значения включает:
элемент, регистрирующий значение сигнала, который регистрирует набор значений сигнала датчика в виде дискретных значений сигнала датчика, в различные точки времени, на протяжении периода времени;
элемент объединения дискретных значений, который объединяет дискретные значения сигнала датчика в группы значений;
соотносящий элемент, который соотносит набор критериев показателей с набором пороговых значений; и
элемент идентификации пороговых значений, который идентифицирует пороговое значение для контрольного порогового сигнала на основании выбранного критерия показателя с использованием соотнесения набора критериев показателей с набором пороговых значений.
Хотя изобретение было описано на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что объем изобретения, определяемый в приложенной формуле изобретения, не обязательно ограничивается конкретными признаками или действиями, описанными выше. Скорее, конкретные признаки или действия, описанные выше, раскрыты в качестве иллюстративных форм воплощения формулы изобретения.
Изобретение относится к сельскохозяйственной машине с системой управления и способу ее управления. Значения сигнала датчика системы управления, указывающие критерий показателя, получают и регистрируют на протяжении заданного временного периода. Объединяют значения сигнала датчика, и на основании объединенного значения сигнала датчика идентифицируют значения порогового сигнала. Набор управляющих сигналов для регулирования подсистем на передвижной сельскохозяйственной машине генерируется на основании идентифицированного порогового значения сигнала, и подсистемы регулируют на основании управляющих сигналов. Изобретение повышает качество управления работой подсистем сельскохозяйственной машины. 2 н. и 18 з.п. ф-лы, 14 ил.
1. Сельскохозяйственная машина, содержащая:
набор регулируемых подсистем, каждая из которых выполняет функцию машины;
множество датчиков, каждый из которых определяет соответствующую переменную в заданной одной из регулируемых подсистем и генерирует сигнал датчика, являющийся показателем значения соответствующей переменной;
систему генерирования контрольного порогового значения, которая принимает сигнал заданного датчика, получает набор значений сигнала датчика, являющихся показателем значений сигнала заданного датчика на протяжении периода времени, и автоматически генерирует контрольный пороговый сигнал с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика; и
систему управления, которая генерирует сигнал регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала заданного датчика и на основании контрольного порогового сигнала.
2. Сельскохозяйственная машина по п. 1, в которой система генерирования контрольного порогового значения содержит:
элемент, регистрирующий значение сигнала, который регистрирует набор значений сигнала датчика в виде дискретных значений сигнала датчика, в различные точки времени, на протяжении периода времени.
3. Сельскохозяйственная машина по п. 2, в которой система генерирования контрольного порогового значения генерирует контрольный пороговый сигнал на основании заданного критерия, являющегося показателем распределения дискретных значений сигнала датчика на протяжении периода времени.
4. Сельскохозяйственная машина по п. 2, в которой система генерирования контрольного порогового значения содержит:
элемент объединения дискретных значений, который объединяет дискретные значения сигнала датчика в группы значений.
5. Сельскохозяйственная машина по п. 4, в которой элемент объединения дискретных значений содержит:
элемент генерирования гистограммы, который генерирует представление в виде гистограммы дискретных значений сигнала датчика.
6. Сельскохозяйственная машина по п. 4, в которой элемент объединения дискретных значений содержит:
цифровой фильтр, который идентифицирует репрезентативное значение в каждой группе значений.
7. Сельскохозяйственная машина по п. 4, в которой система генерирования контрольного порогового значения содержит:
систему идентификации порогового значения, которая идентифицирует пороговое значение контрольного порогового сигнала на основании объединенных дискретных значений сигнала датчика.
8. Сельскохозяйственная машина по п. 7, в которой система идентификации порогового значения содержит:
генератор кумулятивной функции распределения, который генерирует кумулятивную функцию распределения на основании объединенных значений сигнала датчика, которая соотносит набор критериев показателей с набором пороговых значений.
9. Сельскохозяйственная машина по п. 8, в которой система идентификации порогового значения содержит:
элемент применения квантильной функции, который идентифицирует пороговое значение для контрольного порогового сигнала на основании выбранного критерия показателя с использованием соотнесения набора критериев показателей с набором пороговых значений.
10. Сельскохозяйственная машина по п. 1, в которой система генерирования контрольного порогового значения и система управления выполнены с возможностью итерационной генерации контрольного порогового сигнала с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика, и генерации сигнала регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала заданного датчика и на основании контрольного порогового сигнала до тех пор, пока пороговое значение не будет изменяться от одной итерации до следующей итерации меньше, чем на пороговую величину.
11. Сельскохозяйственная машина по п. 1, в которой система генерирования контрольного порогового значения принимает сигнал заданного датчика, получает набор значений сигнала датчика, являющихся показателем значений сигнала заданного датчика на протяжении периода времени, на постоянной основе, и автоматически генерирует контрольный пороговый сигнал с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика.
12. Сельскохозяйственная машина по п. 1, которая представляет собой комбайн, при этом набор регулируемых подсистем включает:
подсистему обмолота;
подсистему фронтального оборудования;
подсистему манипулирования остатками;
двигательную подсистему;
подсистему очистки;
подсистему обработки материала; и
подсистему разделения.
13. Сельскохозяйственная машина по п. 1, которая представляет собой комбайн.
14. Способ управления сельскохозяйственной машиной, включающий:
определение переменной на заданной одной из множества различных регулируемых подсистем на сельскохозяйственной машине;
генерирование сигнала датчика, являющегося показателем значения переменной;
получение набора значений сигнала датчика, являющихся показателем значений сигнала датчика на протяжении периода времени;
автоматическое генерирование контрольного порогового сигнала с пороговым значением, основанным на наборе значений сигнала датчика для сигнала датчика; и
генерирование сигнала регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала датчика и на основании контрольного порогового сигнала.
15. Способ по п. 14, в котором получение набора значений сигнала датчика включает:
сохранение набора значений сигнала датчика в виде дискретных значений сигнала датчика, в различные точки времени, на протяжении периода времени.
16. Способ по п. 15, в котором автоматическое генерирование порогового значения управляющего сигнала включает:
объединение дискретных значений сигнала датчика в группы значений; и
идентификацию порогового значения контрольного порогового сигнала на основании объединенных дискретных значений сигнала датчика.
17. Способ по п. 15, в котором объединение дискретных значений сигнала датчика включает:
генерирование представления дискретных значений сигнала датчика в виде гистограммы.
18. Способ по п. 15, в котором идентификация порогового значения включает:
соотнесение набора критериев показателей с набором пороговых значений на основании объединенных значений сигнала датчика; и
идентификацию порогового значения для контрольного порогового сигнала на основании выбранного критерия показателя с использованием соотнесения набора критериев показателей с набором пороговых значений.
19. Способ по п. 14 и дополнительно включающий:
итерационное генерирование контрольного порогового сигнала с пороговым значением, основанным на наборе значений сигнала датчика для сигнала заданного датчика, и генерирование сигнала регулирования подсистемы, который регулирует заданную управляемую подсистему на основании сигнала заданного датчика и на основании контрольного порогового сигнала до тех пор, пока пороговое значение не стабилизируется.
20. Способ по п. 14, в котором сельскохозяйственная машина представляет собой комбайн, при этом генерирование сигнала регулирования подсистемы и регулирование набора регулируемых подсистем включает регулирование по меньшей мере одной из подсистемы обмолота, подсистемы очистки, подсистемы фронтального оборудования, подсистемы обработки остатков, двигательной подсистемы, подсистемы обработки материала и подсистемы разделения.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СИСТЕМА "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2533922C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ЗНАЧЕНИЯ ПАРАМЕТРА УПРАВЛЕНИЯ РАБОЧЕГО АГРЕГАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ, УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ АГРЕГАТОМ И УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2006 |
|
RU2403698C2 |

