Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству слежения за объектом для медицинской системы получения изображений, к медицинской системе получения изображений, способу слежения за объектом для медицинской системы получения изображений, элементу компьютерной программы для управления таким устройством и считываемому компьютером носителю, на котором хранится такой элемент компьютерной программы.
Уровень техники изобретения
При минимально инвазивной терапии, управляемой изображением, при лечении пациента минимально инвазивным способом может использоваться непрерывное управление на основе изображения. Известная концепция непрерывного управления на основе изображения может относиться к вращающейся системе на основе С-образного кронштейна, которая непрерывно объединяет в себе получение видеоизображений с получением рентгеновских изображений.
Документ WO 2013/102827 описывает устройство определения положения для определения положения хирургического инструмента внутри пациента. Пространственная связь между положениями второй части хирургического инструмента, находящейся вне пациента, и первой части хирургического инструмента, находящейся внутри пациента, определяется, основываясь на фактическом изображении хирургического инструмента внутри пациента, предпочтительно являющимся рентгеновским изображением, и предоставленным положением второй части. Когда пространственная связь определена, положение хирургического инструмента внутри пациента во время перемещения хирургического инструмента внутри пациента может быть определено, основываясь на определенной пространственной связи и определенном фактическом положении второй части снаружи пациента, не требуя получения дополнительного фактического изображения.
Такая концепция требует постоянного присутствия рентгеновского детектора с встроенной видеокамерой, находящейся в C-образном кронштейне постоянно выше, вокруг и ниже интересующей анатомии, чтобы непрерывно следить за пациентом и движение инструмента. Однако, C-образный кронштейн со встроенной видеокамерой может препятствовать выполнению терапии из-за его больших размеров и расположения выше, вокруг и ниже пациента.
Сущность изобретения
Следовательно, может иметься необходимость обеспечения слежения за объектом, меньше препятствующего выполнению терапии.
Задача настоящего изобретения решается посредством сущности независимых пунктов формулы изобретения, причем дополнительные варианты осуществления вводятся в зависимые пункты формулы изобретения. Следует заметить, что описанные далее варианты изобретения применяются также для устройства слежения за объектом, для медицинской системы получения изображений, для способа слежения за объектом, для элемента компьютерной программы и для считываемого компьютером носителя.
В соответствии с настоящим изобретением, представлена медицинская система получения изображений, выполненная с возможностью слежения за заданным подвижным объектом. Заданный подвижный объект может быть медицинским инструментом и/или пациентом. Устройство слежения за объектом содержит первичный блок получения изображений и вторичный блок получения изображений. Первичный блок получения изображений выполнен с возможностью обеспечения первых данных изображения тела пациента. Дополнительно, он может быть выполнен с возможностью обеспечения данных изображения внутренней области тела пациента. Первичный блок получения изображений может перемещаться между режимом получения изображений и режимом парковки. Состояние получения изображений может находиться вблизи тела пациента, тогда как состояние парковки может находиться на удалении от тела пациента.
Вторичный блок получения изображений выполнен с возможностью обеспечения вторых данных изображения тела пациента. Дополнительно, он может быть выполнен с возможностью обеспечения оптических данных изображения внешней области тела пациента, например, формы тела, основных признаков жизнедеятельности, движений, перфузии ткани, свойств кожи и т. д. Однако, вторичный блок получения изображений может также быть исключительно или дополнительно выполнен с возможностью обеспечения данных изображения внутренней области тела пациента.
Система, в частности, первичный блок получения изображений, дополнительно выполнена с возможностью определения положения вторичного блока получения изображений относительно положения опорной точки. Опорная точка предпочтительно является положением первичного блока получения изображений. Однако, опорная точка может также быть точкой в помещении операционной, положение которой относительно положения первичного блока получения изображений известно и которая может поэтому использоваться для вычисления положения вторичного блока получения изображений относительно положения первичного блока получения изображений.
Затем заданный подвижный объект, например, медицинский инструмент или пациент, может прослеживаться в режиме получения изображений, основываясь на данных изображения первичного блока получения изображений, и в режиме парковки, основываясь на данных изображения вторичного блока получения изображений.
Поскольку первичный блок получения изображений может быть перемещен в состояние парковки вдали от хирургического поля, препятствий для выполнения терапии первичным блоком получения изображений можно избежать, причем слежение за медицинским инструментом или пациентом может продолжаться.
В частности, первичный блок получения изображений, выполненный с возможностью определения положения вторичного блока получения изображений, позволяет плавный переход слежения за объектом от первичного к вторичному блоку получения изображений, когда первичный блок получения изображений необходимо вывести из хирургического состояния, то есть, он должен быть перемещен в состояние парковки. Таким образом может быть достигнуто конкретное эффективное слежение за объектом, не требуя каких-либо дополнительных глобальных средств слежения.
Термин "состояние получения изображений" относится к положению, в котором первичный блок получения изображений расположен в подходящем положении вблизи от объекта, чтобы обеспечить первые данные изображения объекта.
Термин "состояние парковки" относится к положению, в котором первичный блок получения изображений находится в положении, в котором первичный блок получения изображений более удален от тела пациента, чем в режиме получения изображений. В режиме парковки первичного блока получения изображений невозможно обеспечить первые данные изображения объекта. При этом не существует никакой линии прямой видимости хирургической области или расстояние или угол непригодны для обеспечения первых данных изображения объекта.
Термин "опорная точка" относится к точке в помещении операционной, положение которой относительно положения первичного блока получения изображений известно и может поэтому использоваться для вычисления положения вторичного блока получения изображений относительно положения первичного блока получения изображений. Опорная точка предпочтительно является положением первичного блока получения изображений.
Термин "заданный подвижный объект" относится к медицинскому инструменту и/или пациенту.
Например, первичный блок получения изображений содержит двумерную и/или трехмерную систему получения рентгеновских изображений. Вторичный блок получения изображений может содержать по меньшей мере одну камеру, способную обнаруживать свойства тела или инструмента, видимого с внешней стороны, например, камеру, работающую в видимом свете, или инфракрасную камеру. Первичный блок получения изображений, в дополнение к блоку получения рентгеновских изображений, может содержать дополнительный блок получения изображений, содержащий по меньшей мере одну дополнительную оптическую камеру, выполненную аналогичным образом, чтобы охватывать хирургическое поле на столе для пациента. Для обоих блоков получения изображений оптические камеры могут быть фиксировано расположены относительно друг друга. Оба блока получения изображений могут представить непрерывные/текущие/живые данные изображения. Оба блока получения изображений могут быть способны трехмерно реконструировать, например, тело.
В дополнительном примере первичный блок получения изображений соединяется с основанием, имеющим C-образный кронштейн, а вторичный блок получения изображений соединяется с креплением. Вторичный блок получения изображений и/или крепление предпочтительно, по меньшей мере, могут временно надежно прикрепляться к опоре объекта, которая может быть столом для пациента, или к потолку, полу или в другом месте в помещении операционной.
В предпочтительном варианте осуществления вторичный блок получения изображений содержит хирургическую подсветку, то есть, хирургическую подсветку, по существу, известную в технике, которая предпочтительно снабжается по меньшей мере одной камерой, чтобы обеспечить вторые данные изображения.
Вторичный блок получения изображений может также быть подвижным и может быть предусмотрен датчик перемещения, чтобы обнаруживать движение вторичного блока получения изображений. Если обнаружено движение вторичного блока получения изображений, пользователь может быть информирован об этом.
В данном примере текущие данные изображения первичного и вторичного блоков получения изображений объединяются в режиме получения изображений. Результатом предпочтительно является рентгеновское изображение, наложенное на оптическое изображение, чтобы следить за пациентом или медицинским инструментом. Поэтому предпочтительное устройство слежения за объектом для медицинской системы получения изображений предлагает не только отображение перемещения внешней области пациента и/или инструмента в реальном времени посредством видеоконтроля, но и отображение перемещения внутренней области пациента и/или инструмента посредством рентгеновских лучей, а также объединение их обоих.
В дополнительном примере, в режиме парковки только вторичный блок получения изображений обеспечивает текущие вторые данные изображения внешности пациента. Однако, эти вторые данные изображения предпочтительно могут объединяться с ранее полученными и сохраненными данными изображения первичного блока получения изображений. Если возникает необходимость в управлении получением изображений/обновлении/проверке первых данных изображения, первичный блок получения изображений переводят обратно из состояния парковки в состояние получения изображений и получают новые первые данные изображения внутренней области тела. Слияние первых и вторых данных получения изображений затем автоматически обновляется новой информацией.
Для предпочтительного объединения первых данных изображения, полученных, например, от рентгеновской системы, и вторых данных изображения, полученных, например, от видеокамеры, положение вторичного блока получения изображений относительно первичного блока получения изображений должно быть известно и поэтому должно определяться и контролироваться.
Следовательно, предпочтительно, положение вторичного блока получения изображений контролируется относительно положения первичного блока получения изображений. Контроль положения может проводиться посредством датчика положения, контролирующего положение вторичного блока получения изображений, или может быть получен из данных изображения, сформированных самими первичным блоком получения изображений и вторичным блоком получения изображений. Такой контроль положения может быть основан на обнаружении характерных или фидуциарных признаков в обоих изображениях, как объясняется позже, или может содержать другую оптическую или неоптическую систему контроля положения, такую как система считывания оптической формы, электромагнитная следящая система, шарнирный манипулятор, радиочастотная система слежения и так далее.
В данном примере, если положения первичного и вторичного блоков получения изображений известны друг другу, данные изображения, полученные одним блоком получения изображений, могут затем регистрироваться и объединяться с данными изображения, полученными другим блоком получения изображений. Слежение за объектом может управляться одним блоком получения изображений, тогда как другой блок получения изображений не требуется вручную калибровать по положению. Следовательно, никакая калибровка не требуется.
Предпочтительно, положение вторичного блока получения изображений контролируется относительно положения первичного блока получения изображений. Данные изображения, полученные вторичным блоком получения изображений, могут затем регистрироваться и объединяться с данными изображения, полученными первичным блоком получения изображений, не требуя трудоёмкой и сложной калибровки вторичного блока получения изображений.
Согласно примеру, первичный и вторичный блоки получения изображений выполнены с возможностью определения положения определенных характерных или фидуциарных признаков объекта. Положения характерных или фидуциарных признаков в первых и вторых данных изображений могут затем определяться относительно друг друга, откуда может быть получено положение вторичного блока получения изображений относительно первичного блока получения изображений. В предпочтительном варианте осуществления, с этой целью, первые оптические данные изображения, предоставляемые камерой дополнительного блока получения изображений, объединяются со вторыми оптическими данными изображения, предоставляемыми камерой вторичного блока получения изображений.
Характерным признаком может быть, например, определенный конец инструмента или определенный физический признак пациента. Фидуциарным признаком может быть пассивный маркер, который не выполняет активной передачи оптического излучения блокам получения изображений, или может быть активный маркер, то есть, источник света, дающий излучение на блоки получения изображений. Например, фидуциарным признаком может быть источник инфракрасного света и камеры во вторичном и дополнительных блоках получения изображений могут быть инфракрасными камерами для получения инфракрасных изображений, показывающих фидуциарный признак в инфракрасном свете.
Фидуциарный признак предпочтительно располагается на пациенте или на инструменте. Предпочтительно, для определения положения вторичного блока получения изображений, например, относительно первичного блока получения изображений, используются несколько фидуциарных признаков. К тому же, предпочтительно, камеры в обоих блоках получения изображений направлены на фидуциарные признаки, так что, полученные первые оптические данные изображения показывают положение фидуциарных признаков относительно первичного блока получения изображений, а полученные вторые оптические данные изображения показывают положение фидуциарных признаков относительно вторичного блока получения изображений. При наложении относительных положений фидуциарных признаков в первичных и вторичных данных изображения, вычисляют относительные положения и ориентации первичного блока получения изображений и вторичного блока получения изображений. В частности, вычисляют положение вторичного блока получения изображений относительно положения первичного блока получения изображений. То же самое применяют, если характерный признак или объединение характерного и фидуциарного признаков используется вместо фидуциарного признака. Зная эти данные, можно объединять данные изображений от обоих блоков получения изображений, в частности, данные рентгеновского изображения от первичного блока получения изображений и оптические данные изображения от вторичного блока получения изображений.
При каждом обновлении полученных первичных и вторичных данных изображений обновляются относительные положения первичного и вторичного блоков получения изображений. Когда один (или оба) блока получения изображений движутся, относительное положение первичного и вторичного блоков получения изображений вычисляются повторно, пока оба блока получения изображений не будут иметь линию прямой видимости на фидуциарный признак. Если линия прямой видимости первичного блока получения изображений теряется, слежение за пациентом и/или инструментом принимает на себя вторичный блок получения изображений.
В дополнительном примере, вторичный блок получения изображений и/или дополнительный блок получения изображений содержит гиперспектральную камеру, способную контролировать внешнюю область тела в различных спектральных полосах длин волн.
В дополнительном примере вторичный блок получения изображений и/или дополнительный блок получения изображений способен следить за лапароскопом и может расширить лапароскопическое представление данными рентгеновского изображения, полученными от одного из блоков получения изображений.
В соответствии с дополнительным примером, первичный блок получения изображений следит по меньшей мере за первым объектом (например, медицинским инструментом), а вторичный блок получения изображений следит по меньшей мере за вторым объектом (например, за пациентом или за его/ее частью).
В соответствии с настоящим изобретением, медицинская система получения изображений может дополнительно содержать устройство получения изображений, поддержку для объекта, например, в виде стола для пациента, блок управления и устройство отображения.
Устройство отображения, расположенное, например, во вторичном блоке получения изображений, может содержать монитор для представления данных, полученных первичным и/или вторичным блоком получения изображений. Медицинская система получения изображений и, в частности, вторичный блок получения изображений может дополнительно содержать хирургическую подсветку для освещения хирургической области.
В соответствии с настоящим изобретением, представляется также способ слежения за объектом для медицинской системы получения изображений для слежения за заданным подвижным объектом, таким как пациент или медицинский инструмент. Способ содержит следующие этапы, на которых:
a) обеспечивают данные изображения тела пациента первичным блоком получения изображений, который может перемещаться между режимом получения изображений и режимом парковки,
b) обеспечивают данные изображения тела пациента вторичным блоком получения изображений, и
c) контролируют посредством первичного блока получения изображений, положение вторичного блока получения изображений относительно положения опорной точки, и
d) осуществляют слежение за заданным подвижным объектом:
когда первичный блок получения изображений находится в режиме получения изображений, основываясь на получении изображений первичным блоком получения изображений, и
когда первичный блок получения изображений находится в режиме парковки, основываясь на получении изображений вторичным блоком получения изображений.
В данном примере, в режиме получения изображений, поскольку положение вторичного блока получения изображений относительно первичного блока получения изображений известно, первые данные изображения от рентгеновской системы и вторые данные изображения от оптической камеры могут объединяться. Это предпочтительно обеспечивает получение рентгеновских изображений с наложением оптических изображений, чтобы следить за пациентом или медицинским инструментом.
В дополнительном примере, в режиме парковки, когда первичный блок получения изображений наиболее отдален от тела пациента, только вторичный блок получения изображений обеспечивает текущие вторые данные изображения тела пациента, предпочтительно оптические данные изображения. Однако, эти вторые данные изображения все равно можно объединять с ранее полученными и сохраненными данными изображения первичного блока получения изображений. При необходимости управления получением изображений/обновления/проверки первых данных изображения основание с C-образным кронштейном и первичный блок получения изображений переводят обратно из состояния парковки в состояние получения изображений и создают новые первые данные изображения внутренней области тела. Объединенные полученные первые и вторые данные изображения затем автоматически обновляются новой информацией.
В дополнительном примере настоящего изобретения представляется компьютерная программа слежения за заданным подвижным объектом, причем компьютерная программа содержит средство управляющей программы, чтобы заставлять устройство слежения за объектом, как оно определено в независимом пункте формулы изобретения для устройства, выполнять этапы способа слежения за объектом, как это определено в независимом пункте формулы изобретения для способа, когда компьютерная программа работает на компьютере, управляющем устройством слежения за объектом.
В соответствии с вариантом настоящего изобретения, первичный блок получения изображений, то есть, рентгеновский блок, дополняется вторичным блоком получения изображений. Задача слежения обеспечивается вторичным блоком. Поскольку вторичный блок может быть несколько меньшим по размерам, он более доступен и, таким образом, обеспечивается свободное рабочее пространство. Предпочтительно, вторичный блок получения изображений интегрируется с хирургической подсветкой, которая обычно используется во время интервенционистских или хирургических процедур, так что никакие дополнительные устройства не требуются.
Дополнительно, предпочтительно обеспечивается первичный блок получения изображений с дополнительным блоком получения изображений, содержащим по меньшей мере одну камеру; дополнительный блок получения изображений, например, интегрируется в корпус датчика рентгеновского блока, так чтобы обеспечивать автоматическую регистрацию рентгеновских изображений и оптических изображений, предоставляемых дополнительным блоком получения изображений.
Другими словами, подчиненная система слежения встраивается в подчиненный или вторичный блок получения изображений, прикрепленный к операционному столу и соединенный с комплектом видеокамеры, расположенным в дополнительном блоке получения изображений основного или первичного блока получения изображений. Непрерывная связь в реальном времени между основным набором из четырех видеокамер в дополнительном блоке получения изображений и подчиненным набором из двух камер во вторичном блоке гарантирует установление пространственного местоположения подчиненного блока получения изображений и определенное пространственное видение.
Когда C-образный кронштейн основной системы получения изображения, как полагают, может препятствовать проведению терапии, подчиненный блок получения без резких переходов плавно принимает на себя управление, позволяя, таким образом, временно парковать C—образный кронштейн вне хирургического поля. Когда возникает необходимость обеспечения получения двумерного или трехмерного рентгеновского изображения, C-образный кронштейн может быть передвинут обратно в область получения изображений или в рабочее положение и слежение за объектом может перейти обратно от подчиненного блока получения изображений к основному блоку получения изображений.
Изобретение обеспечивает слежение как за пациентом, так и за инструментом с минимально инвазийными параметрами настройки терапии, с непрерывной доступностью для управления получением изображений/обновления/проверки, с C-образным кронштейном, расположенным в непосредственной близости.
Следует понимать, что медицинская система получения изображений, способ слежения за объектом для медицинской системы получения изображений, элемент компьютерной программы для управления таким устройством и считываемый компьютером носитель, хранящий такой элемент компьютерной программы согласно независимым пунктам формулы изобретения, имеют схожие и/или идентичные предпочтительные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения. Дополнительно, следует понимать, что предпочтительный вариант осуществления изобретения может также быть любым сочетанием зависимых пунктов формулы изобретения с соответствующим независимыми пунктами формулы изобретения.
Эти и другие варианты настоящего изобретения станут очевидны и будут подробно объяснены со ссылкой на описанные здесь далее варианты осуществления.
Краткое описание чертежей
Примерные варианты осуществления изобретения будут описаны здесь далее со ссылкой на сопроводительные чертежи:
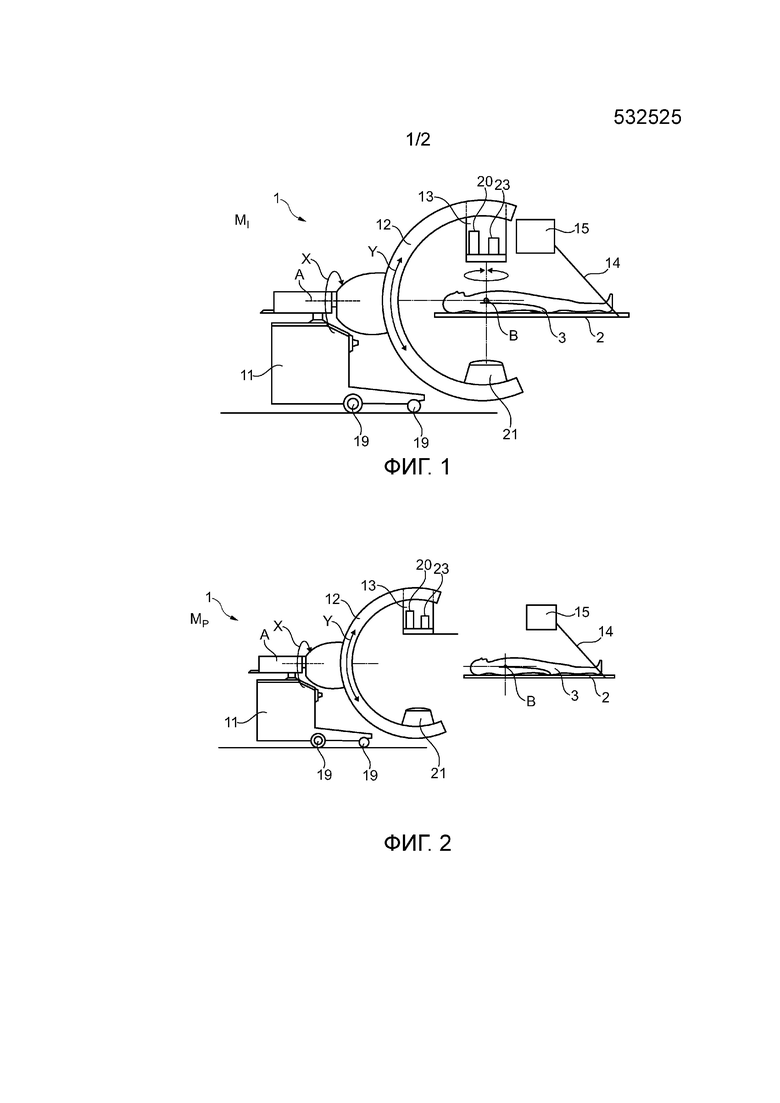
Фиг. 1 - схематичный пример медицинской системы получения изображений с двумя блоками получения изображений, где оба блока получения изображений расположены выше, вокруг и ниже пациента.
Фиг. 2 - схематичный пример медицинской системы получения изображений, где только один блок, то есть, вторичный блок получения изображений, расположен выше пациента, тогда как другой блок, то есть, первичный блок получения изображений припаркован в стороне,
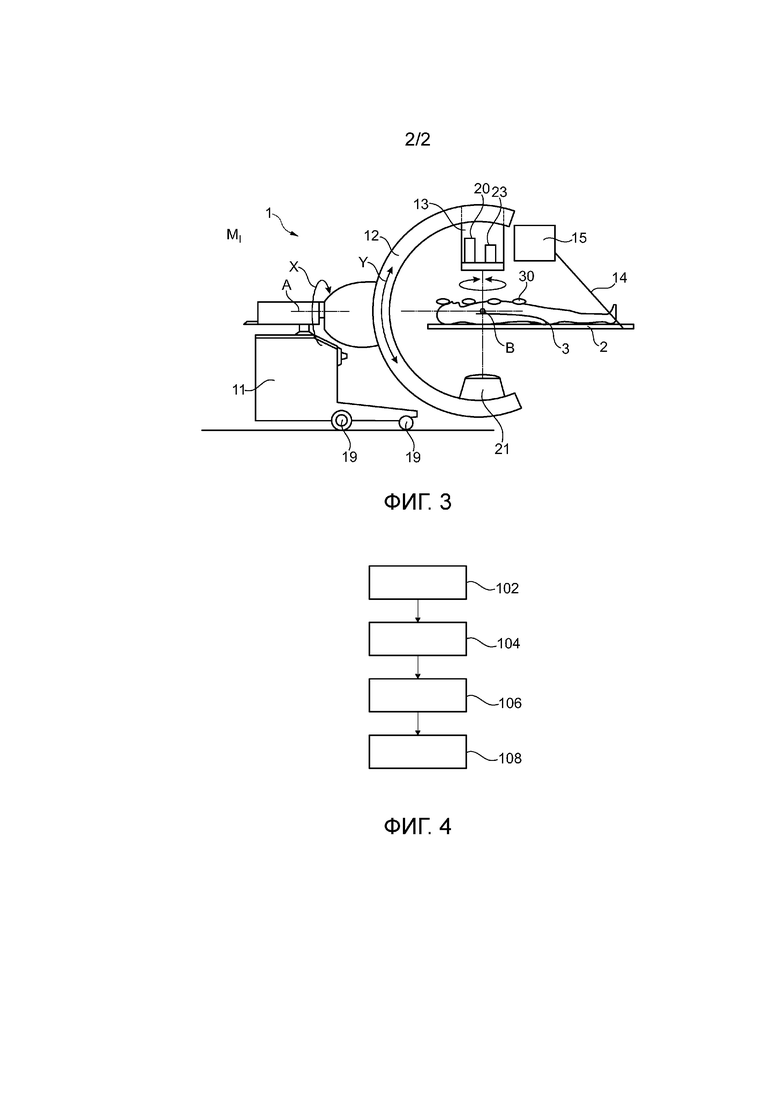
Фиг. 3 - схематичный пример медицинской системы получения изображений в ситуации, подобной фиг. l, где для определения положения вторичного блока получения изображений относительно первичного блока получения изображений используются фидуциарные признаки, и
Фиг. 4 - основные этапы примера способа сопровождения медицинской системой получения изображений заданного подвижного объекта.
Подробное описание вариантов осуществления
На фиг. 1 схематично и в качестве примера показан вариант осуществления медицинской системы получения изображений, соответствующей изобретению. Медицинская система получения изображений содержит устройство 1 слежения за объектом, поддержку объекта в виде, например, стола 2 для пациента, блок управления (не показан) и устройство отображения (не показано). Устройство 1 слежения за объектом, соответствующее изобретению, служит для слежения за заданным подвижным объектом, таким как пациент 3 или медицинский инструмент. Оно содержит основание 11 с C-образным кронштейном 12, первичный блок 13 получения изображений и крепление 14 с вторичным блоком 15 получения изображений.
Основание 11 может двигаться относительно стола 2 для пациента и, к тому же, установлено на колесах 19. Нет необходимости прикреплять основание 11 к столу 2 для пациента. C-образный кронштейн 12 в положении, показанном на фиг. 1, охватывает стол 2 для пациента. Другими словами, он расположен выше, вокруг и ниже стола 2 для пациента. C-образный кронштейн 12 может вращаться относительно основания 11 и относительно пациента 3. Возможны угловое вращение C-образного кронштейна 12 вокруг первой оси А в направлении стрелки X и/или орбитальное вращение вокруг второй оси B в направлении стрелки Y.
Первичный блок 13 получения изображений располагается в устройстве 1 слежения за объектом и, в частности, в C-образном кронштейне 12. Он выполнен с возможностью обеспечения первых данных изображения, как дополнительно объясняется ниже, например, внутренней области тела пациента. Поэтому, первичный блок 13 получения изображений содержит двумерную и/или трехмерную рентгеновскую систему в виде рентгеновского детектора 20 в верхнем плече C-образного кронштейна 12 и источник 21 рентгеновского излучения в нижнем плече. Двумерная и/или трехмерная рентгеновская система может содержать одну или более рентгеновских камер. Источник 21 рентгеновского излучения и рентгеновский детектор 20 управляются блоком управления (не показан). Рентгеновское излучение, сформированное источником 21 рентгеновского излучения, пересекает пациента 3 и стол 2 для пациента и проходящее рентгеновское излучение затем обнаруживается рентгеновским детектором 20. Рентгеновский детектор 20 и источник 21 рентгеновского излучения расположены на концах C-образного кронштейна 12. В целом, они выполнены с возможностью охвата всего хирургического поля на столе 2 для пациента. C-образный кронштейн 12 может вращаться относительно основания 11 и относительно пациента 3, чтобы позволить первичному блоку 13 получения изображений обеспечивать реальное изображение, показывающее желаемую область внутри пациента 3 в желаемом направлении.
Первые данные изображения являются трехмерным набором данных изображения, являющимся в настоящем варианте осуществления набором трехмерных данных компьютерного томографического изображения. В других вариантах осуществления набор данных изображения может быть также двумерным набором данных изображения. Кроме того, набор данных изображения может быть набором данных изображения другого способа получения изображений, такого как магнитно-резонансная, ультразвуковая, гамма-томографическая компьютерная томография и позитронно-эмиссионная томография.
Дополнительный блок 23 получения изображений, такой как камера, чувствительная к ультрафиолетовому свету (UV-свет), инфракрасному свету (IR-свет) и/или к свету с видимыми длинами волн, дополнительно прикрепляется к верхнему плечу C-образного кронштейна 12, сбоку от рентгеновского детектора 20. Эта камера также выполнена с возможностью охвата хирургического поля на столе 2 для пациента. Предпочтительно, набор, например, из четырех камер располагается вдоль другой стороны рентгеновского детектора и интегрируется в его корпус.
Следует заметить, что C-образный кронштейн показан в качестве примера. Конечно, могут также обеспечиваться другие подвижные рентгеновские блоки, как например, рентгеновская система, прикрепленная, например, к рельсу на потолке, стене или на полу, или рентгеновская система, прикрепленная к роботизированному кронштейну.
Крепление 14 с вторичным блоком 15 получения изображений присоединяется к столу 2 для пациента и может охватывать хирургическое поле на столе 2 для пациента. Вторичный блок 15 получения изображений может также быть расположен где-либо в другом месте в помещении операционной. Предпочтительно, вторичный блок 15 получения изображений дополнительно содержит хирургическую подсветку.
Крепление 14 и/или вторичный блок 15 получения изображений могут перемещаться относительно стола 2 для пациента. Вторичный блок 15 получения изображений выполнен с возможностью обеспечения вторых данных изображения, например, внешней области тела пациента, предпочтительно, оптических данных изображения. Поэтому он содержит по меньшей мере одну камеру, способную обнаруживать периодически или непрерывно свойства тела, видимые с внешней стороны. Вторичный блок 15 получения изображений также способен следить за инструментами. Предпочтительно, вторичный блок 15 получения изображений содержит набор, например, из двух камер.
Однако, вторичный блок 15 получения изображений может также исключительно или дополнительно быть выполнен с возможностью обеспечения данных изображения внутренней области тела пациента.
Блок управления (не показан) периодически или непрерывно объединяет первые и вторые данные изображения и отображает их на мониторе (не показан). Он, следовательно, обеспечивает получение рентгеновских изображений с наложением полученных видеоизображений, чтобы следить за заданным движущимся объектом, таким как пациент 3 или медицинский инструмент. В результате, примерное устройство 1 слежения за объектом для медицинской системы получения изображений предлагает не только отображение в реальном времени перемещения внешней области пациента и/или инструмента посредством управления видеоизображением и отображение в реальном времени перемещения внутренней области пациента и/или инструмента посредством рентгеновского изображения, но и объединение их обоих.
Термин "объединение" относится к интеграции первых и вторых данных изображения в одно изображение.
Чтобы объединить первые данные изображения от рентгеновской системы и вторые данные изображения от видеокамеры, необходимо знать и, следовательно, контролировать положение вторичного блока 15 получения изображений относительно первичного блока 13 получения изображений. В показанном варианте осуществления положение вторичного блока получения изображений 15 проверяется относительно положения первичного блока получения изображений 13. В другом варианте осуществления положение вторичного блока 15 получения изображений может контролироваться относительно опорной точки, например, заданной опорной точки в помещении операционной, причем положение относительно положения первичного блока 13 получения изображений известно и может использоваться для вычисления положения вторичного блока 15 получения изображений относительно положения первичного блока 13 получения изображений.
Другими словами, если положение и ориентация локальных систем координат первичного и вторичного блоков получения изображений известны относительно друг друга, данные изображения, полученные одним блоком получения изображений, могут объединяться с данными изображения, полученными другим блоком получения изображений. Способ слежения за объектом, соответствующий изобретению, может управляться одним блоком получения изображений, в то время как положение другого блока получения изображений не требует ручной калибровки. Следовательно, никакая калибровка не требуется.
Чтобы обеспечить устройство 1 слежения за объектом для медицинской системы получения изображений и медицинскую систему получения изображений, причем проведению терапии не мешает устройство 1 слежения за объектом, основание 11 с C-образным кронштейном 12 может изменяться между режимом MI получения изображений, показанным на фиг. 1, вблизи стола 2 для пациента и режимом MР парковки, показанным на фиг. 2, в более удаленном от стола 2 для пациента месте.
На фиг. 2, следовательно, схематично показан чертеж медицинской системы получения изображений в ситуации, где только вторичный блок 15 получения изображений присутствует над пациентом 3, тогда как основание 11 с C-образным кронштейном 12 и первичный блок 13 получения изображений припаркованы в стороне. В этом состоянии парковки основание 11 с C-образным кронштейном 12 не мешает врачу и/или медицинскому персоналу во время выполнения терапии. В режиме парковки только вторичный блок 15 получения изображений предоставляет текущие вторые данные изображения внешней области тела пациента. Однако, эти вторые данные изображения могут продолжать объединяться с ранее полученными и сохраненными данными изображения первичного блока 13 получения изображений. Если возникает необходимость управления получением изображений/обновления/проверки первых данных изображения, основание 11 с C-образным кронштейном 12 и первичный блок 12 получения изображений переводятся обратно из состояния парковки в состояние получения изображений и получают новые первые данные изображения внутренней области тела. Объединение первых и вторых полученных данных изображений затем автоматически обновляется новой информацией изображения первичного блока 13 получения изображений.
Примерный способ слежения за объектом для медицинской системы получения изображений для слежения за заданным подвижным объектом, таким как пациент 3 или медицинский инструмент, поэтому содержит следующие этапы, показанные на фиг. 1 и 2:
a) Обеспечивают данные изображения тела пациента и/или медицинского инструмента с помощью первичного блоком 13 получения изображений, находящегося в режиме получения изображений вблизи тела пациента, как показано на фиг. 1. Первичный блок 13 получения изображений является рентгеновской системой, выполненной с возможностью обеспечения рентгеновских данных изображения внутренней области тела пациента. Первичный блок 13 получения изображений может переводиться из состояния MI получения изображений (фиг. 1) в состояние MР парковки (фиг. 2), более удаленное от тела пациента, и наоборот.
b) Обеспечивают данные изображения тела пациента и/или медицинского инструмента с помощью вторичного блока 15 получения изображений 15. Вторичный блок получения изображений 15 является фотокамерой и/или видеокамерой, способной обнаруживать свойства тела, видимые во внешней области.
c) Контролируют положение вторичного блока 15 получения изображений относительно положения опорной точки, которая может быть положением первичного блока 13 получения изображений. Контроль выполняется посредством определением местоположения контроля положения, который может обеспечиваться датчиком или самим первичным и вторичным блоками получения изображений посредством фидуциарных признаков 30, как подробно описано ниже со ссылкой на фиг. 3.
d) Осуществляют слежение за телом пациента и/или за медицинским инструментом в режиме MI получения изображений (фиг. 1), основываясь на получении изображений первичным блоком 13 получения изображений, и в режиме MP парковки (фиг. 2), основываясь на получении изображений вторичным блоком 15 получения изображений.
В режиме MI получения изображений (фиг. 1), поскольку положение вторичного блока 15 получения изображений относительно первичного блока 13 получения изображений известно, первые данные изображения от рентгеновской системы и вторые данные изображения от фотокамеры и/или видеокамеры могут объединяться. Это обеспечивает получение рентгеновского изображения, наложенного на фотоизображение и/или видеоизображение, чтобы следить за пациентом 3 или медицинским инструментом.
В режиме MР парковки (фиг. 2), когда первичный блок 13 получения изображений наиболее удален от тела пациента, только вторичный блок 15 получения изображений обеспечивает текущие вторые данные изображения тела пациента. Однако, эти вторые данные изображения могут продолжать объединяться с ранее полученными и хранящимися данными изображения первичного блока 13 получения изображений. Если возникает необходимость в управлении получением изображений/обновлении/проверке первых данных изображения, основание 11 с C-образным кронштейном 12 и первичным блоком 13 получения изображений переводится обратно из состояния парковки (фиг. 2) в состояние получения изображений (фиг. 1) и получают новые первые данные изображения внутренней области тела. Объединение первых и вторых полученных данных изображений затем автоматически обновляется новой информацией.
На фиг. 3 схематично показана медицинская система получения изображений в ситуации, подобной фиг. 1, где фидуциарные признаки 30 используются для определения положения вторичного блока 15 получения изображений относительно первичного блока 13 получения изображений. Фидуциарные признаки 30 могут быть пассивными маркерами, которые не посылают активно оптическое излучение на блоки получения изображений, или они могут быть активными маркерами, то есть, источниками света, посылающими излучение на блоки получения изображений. Например, фидуциарные признаки 30 может быть источниками инфракрасного света и блоки получения изображений могут быть чувствительны к инфракрасному свету, чтобы получать инфракрасные изображения, показывающие фидуциарные признаки 30 в инфракрасном свете.
Как показано на фиг. 3, предпочтительно используются четыре фидуциарных признака 30, чтобы сформировать фидуциарную модель для надежного определения положения вторичного блока 15 получения изображений. Фидуциарные признаки 30 располагаются на пациенте. Оба блока 13 и 15 получения изображений направлены на фидуциарные признаки 30. Полученные таким образом первичные данные изображения показывают положение фидуциарных признаков 30 относительно первичного блока 13 получения изображений и полученные вторичные данные изображения показывают положение фидуциарных признаков 30 относительно вторичного блока 15 получения изображений. Регистрируя положения фидуциарных признаков 30 в данных первичного и вторичного изображения относительно друг друга, вычисляют положение вторичного блока 15 получения изображений относительно положения первичного блока 13 получения изображений 13.
Зная это, данные изображения от обоих блоков 13, 15 получения изображений могут объединяться и может обеспечиваться плавный переход слежения за объектом от первичного блока 13 получения изображений к вторичному блоку 15 получения изображений, если первичный блок 13 получения изображений 13 необходимо вывести из области хирургического поля.
При каждом обновлении полученных первичных и вторичных данных изображения могут обновляться относительные положения первичных и вторичных блоков 13, 15 получения изображений. Когда один (или оба) блока получения изображений движутся, относительное положение первичного и вторичного блоков 13, 15 получения изображений вычисляются повторно, пока оба блока получения изображений не будут поддерживать линию прямой видимости на фидуциарные признаки 30.
Если линия прямой видимости первичного блока 13 получения изображений теряется, например, из-за того, что первичный блок получения изображений переводится в состояние парковки, слежение за пациентом 3 и/или инструментов принимает на себя вторичный блок 15 получения изображений. Напротив, если потеряна линия прямой видимости вторичного блока 15 получения изображений, то слежение за пациентом 3 и/или инструментом будет брать на себя первичный блок 13 получения изображений. То же самое может быть достигнуто, если вместо фидуциарных признаков 30 используются конкретные характерные признаки объекта.
Другими словами, подчиненная система камер подчиненного или вторичного блока получения изображений может содержать две или более камер, жестко соединенных друг с другом. Связь между камерами и собственными параметрами камер калибруется таким же образом, как основная система камер, прикрепленная к детектору. Подчиненная система камер прикрепляется к потолку, полу или к столу для пациента или интегрируется с хирургической подсветкой и нацеливается на фидуциарные признаки 30 на пациенте или инструментах. При калиброванной подчиненной системе камер может быть вычислено расположение подчиненной системы камер относительно фидуциарной модели. Фидуциарная модель создается системой камер детектора по фидуциарным признакам, прикрепленным на пациенте или инструменте. Если расположение подчиненной системы камер относительно фидуциарной модели известно, то можно также вычислить расположение подчиненной системы камер относительно рентгеновской системы.
Если подчиненная система камер перемещается, расположение подчиненной системы камер может обновляться, пока обе системы камер имеют линию прямой видимости, направленную на фидуциарную модель. Если подчиненная система камер располагается правильно, система камер детектора может перемещаться, пока не будет потеряна линия прямой видимости, направленная на фидуциарную модель. Если линия прямой видимости системы камер детектора теряется, слежение за пациентом и/или инструментом берет на себя подчиненная система камер, а также возможна комбинация, что за одним инструментом следит система камер детектора, а, например, за пациентом следит подчиненная система камеры.
Если слежение ведет подчиненная система камер, подчиненная камера не должна перемещаться, когда система камер детектора не имеет линии прямой видимости. Поэтому мы предлагаем добавить к подчиненной системе камер датчик перемещения для обнаружения перемещения. Если движение подчиненной системы камер обнаружено, можно информировать об этом пользователя.
Фидуциарная модель должна состоять по меньшей мере из четырех фидуциарных признаков, чтобы быть способной надежно определить расположение подчиненной системы камер.
В результате, таким образом, разрешается непрерывная связь в реальном времени между предпочтительно четырьмя видеокамерами в рентгеновском детекторе 20 первичного блока 13 получения изображений и, предпочтительно, двумя видеокамерами во вторичном блоке 15 получения изображений.
Как первичный, так и вторичный блоки 15 получения изображений могут действовать напрямую и могут управляться только одним из двух блоков получения изображений. Управляющим блоком получения изображений предпочтительно является первичный блок 13 получения изображений. Однако, на теле пациента возможно также выполнение операций, управляемых вторичным блоком 15 получения изображений.
Также возможно, что первичный блок 13 получения изображений следит за первым объектом (например, медицинским инструментом), а вторичный блок 15 получения изображений следит за вторым объектом (например, за пациентом 3 или его/ее частью).
Варианты осуществления изобретения могут использоваться во время минимально инвазивных процедур, требующих слежения за объектом посредством рентгеновских лучей, таких как пункционная биопсия, радиочастотная абляция и так далее. Изобретение предполагается использовать, например, при следующих клинических условиях: минимально инвазивная травматологическая хирургия, минимально инвазивная ортопедическая хирургия, минимально инвазивная нейрохирургическая терапия, минимально инвазивная лапароскопическая терапия, минимально инвазивная эндоскопическая терапия, минимально инвазивная гинекология, минимально инвазивная урология, минимально инвазивные бронхоскопические процедуры.
Система получения изображений будет непрерывно присутствовать выше хирургической/интервенциональной области для целей терапии, управляемой изображением. Слежение за пациентом и инструментом может быть непрерывным, когда возникает необходимость временно вывести первичный блок получения изображений в его положение парковки. Дополнительно, в соответствии с существующими клиническими обстоятельствами и без какого-либо прерывания терапии, разрешается возможность повторяющейся передачи навигации от первичного блока получения изображений и обратно.
На фиг. 4 схематично показаны этапы способа 100 слежения за объектом для медицинской системы получения изображений, чтобы следить за заданным движущимся объектом. Способ, как указано выше, не обязательно в приведенном порядке содержит следующие этапы, на которых:
На первом этапе 102 данные изображения тела пациента обеспечиваются первичным блоком получения изображений, который может перемещаться между режимом отображения и режимом парковки.
На втором этапе 104 данные изображения тела пациента предоставляются вторичным блоком получения изображений.
На третьем этапе 106 положение вторичного блока получения изображений относительно положения опорной точки определяется посредством первичного блока получения изображений.
На четвертом этапе 108 осуществляется слежение за заданным подвижным объектом i) в режиме получения изображений, основываясь на получении изображений первичным блоком (13) получения изображений, и ii) в режиме парковки, основываясь на получении изображений вторичным блоком (15) получения изображений.
Первый этап 102 также упоминается как этап a), второй этап 104 упоминается как этап b), третий этап 106 упоминается как этап c) и четвертый этап 108 упоминается как этап d).
Другими словами, способ 100 слежения за объектом для медицинской системы получения изображений является способом, где первичный или основной блок получения изображений медицинской системы получает трехмерное изображение внутренней области тела, основной блок получения изображений определяет положение вторичного или подчиненного блока получения изображений, камера подчиненного блока получения изображений получает изображение внешней области тела, медицинская система регистрирует изображение внутренней области и внешней области друг на друге, используя положение подчиненного блока получения изображений относительно основного блока получения изображений, блок получения изображений помещается вдали от тела, операции на теле выполняются как управляемые подчиненным блоком получения изображений.
В другом примерном варианте осуществления настоящего изобретения обеспечивается компьютерная программа или элемент компьютерной программы, характеризующиеся приспособляемостью к выполнению этапов способа для способа, соответствующего одному из предшествующих вариантов осуществления, на соответствующей системе.
Элемент компьютерной программы может поэтому храниться в компьютерном блоке, который может также быть частью варианта осуществления настоящего изобретения. Эта компьютерный блок может быть выполнен с возможностью осуществления или стимулирования осуществления этапов способа, описанного выше. Кроме того, он может быть выполнен с возможностью управления компонентами описанного выше устройства. Компьютерный блок может быть выполнен с возможностью автоматического действия и/или выполнения команд пользователя. Компьютерная программа может загружаться в рабочую память процессора данных. Процессор данных может, таким образом, быть оборудован для выполнения способа изобретения.
Этот примерный вариант осуществления изобретения охватывает как компьютерную программу, которая с самого начала использует изобретение, так и компьютерную программу, которая посредством обновления превращает существующую программу в программу, которая использует изобретение.
Дополнительно, компьютерный программный элемент может быть способен обеспечивать все необходимые этапы, чтобы выполнять процедуру примерного варианта осуществления способа, как описано выше.
В соответствии с дополнительным примерным вариантом осуществления настоящего изобретения представляется считываемый компьютером носитель, такой как компакт-диск, причем на считываемом компьютером носителе хранится компьютерный программный элемент, такой компьютерный программный элемент, описанный в предыдущем разделе.
Компьютерная программа может храниться и/или распространяться на соответствующем носителе, таком как оптический носитель данных, поставляемый вместе или как часть другого аппаратурного обеспечения, но может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи.
Однако, компьютерная программа может также быть предоставлена через сеть, такую как World Wide Web, и может быть загружена в рабочую память процессора данных из такой сети. В соответствии с дополнительным примерным вариантом осуществления настоящего изобретения, обеспечивается носитель, чтобы сделать компьютерный программный элемент доступным для загрузки, причем компьютерный программный элемент выполнен с возможностью исполнения способа в соответствии с одним из ранее описанных вариантов осуществления изобретения.
Следует заметить, что варианты осуществления изобретения описываются со ссылкой на различные предметы изобретения. В частности, некоторые варианты осуществления описываются со ссылкой пункты формулы изобретения типа способа, тогда как другие варианты осуществления описываются со ссылкой на пункты формулы изобретения типа устройства. Однако, специалист в данной области техники будет выбирать от вышесказанного и последующего описания, если не сообщается иное, в дополнение к любому объединению признаков, принадлежащих одному типу объекта изобретения, также любое объединение признаков, связанных с другими объектами изобретения, которые считаются раскрытыми посредством настоящей заявки. Однако, все признаки могут объединяться, обеспечивая синергетические эффекты, которые являются большим, чем простое суммирование признаков.
Хотя изобретение было показано и подробно описано на чертежах и в предшествующем описании, такие показ и описание следует считать иллюстративными или примерными и не создающими ограничений. Изобретение не ограничивается раскрытыми вариантами осуществления. Другие вариации раскрытых вариантов осуществления могут стать понятны и осуществлены при практическом использовании заявленного изобретения, исходя из изучения чертежей, раскрытия и зависимых пунктов формулы изобретения.
В пунктах формулы изобретения слово "содержащий" не исключает другие элементы или этапы и единственное число не исключает множественное число. Единый процессор или другой блок могут выполнять функции нескольких пунктов формулы изобретения, приведенных в формуле изобретения. Простой факт, что определенные критерии приводятся во взаимно различных зависимых пунктах формулы изобретения, не указывает, что объединение этих критериев не сможет использоваться для получения преимущества. Любые ссылочные позиции в пунктах формулы изобретения не должны рассматриваться как ограничение объема формулы изобретения.
Группа изобретений относится к медицине, а именно к слежению за объектом для медицинской системы и получению изображений для слежения за заданным подвижным объектом. Предложен компьютерно-читаемый носитель, на котором хранится элемент компьютерной программы управления устройством, который при выполнении модулем обработки выполнен с возможностью исполнения этапов способа, причем упомянутый способ содержит следующие этапы, на которых: a) обеспечивают (102) данные изображения тела пациента посредством первичного блока (13) получения изображений, который может перемещаться между режимом получения изображений и режимом парковки, b) обеспечивают (104) данные изображения тела пациента посредством вторичного блока (15) получения изображений, и c) определяют (106) посредством первичного блока (13) получения изображений положение вторичного блока (15) получения изображений относительно опорного положения, и d) следят (108) за заданным подвижным объектом: в режиме получения изображений, основываясь на получении изображений первичным блоком (13) получения изображений, и в режиме парковки, основываясь на получении изображений вторичным блоком (15) получения изображений. Группа изобретений обеспечивает слежение за объектом, меньше препятствующее выполнению терапии. 3 н. и 11 з.п. ф-лы, 4 ил.
1. Медицинская система получения изображений, выполненная с возможностью слежения за заданным подвижным объектом, содержащая:
первичный блок (13) получения изображений для обеспечения первых данных изображения тела пациента, причем первичный блок получения изображений может перемещаться между режимом получения изображений (MI) и режимом парковки (MP), и
вторичный блок (15) получения изображений для обеспечения вторых данных изображения тела пациента,
причем первичный блок (13) получения изображений выполнен с возможностью слежения за заданным подвижным объектом, на основе первых данных изображения, когда первичный блок получения изображений находится в режиме получения изображений,
причем вторичный блок (15) получения изображений выполнен с возможностью слежения за заданным подвижным объектом, на основе вторых данных изображения, когда первичный блок получения изображений находится в режиме парковки, и
причем первичный блок (13) получения изображений дополнительно выполнен с возможностью определения положения вторичного блока (15) получения изображений относительно опорного положения.
2. Медицинская система получения изображений по п. 1, в которой первичный блок (13) получения изображений содержит:
блок (20) получения рентгеновских изображений, и
дополнительный блок (23) получения изображений, содержащий по меньшей мере одну камеру для обеспечения первых оптических данных изображения тела пациента.
3. Медицинская система получения изображений по п. 1 или 2, в которой вторичный блок (15) получения изображений содержит по меньшей мере одну камеру для обеспечения вторых оптических данных изображения в качестве вторых данных изображения.
4. Медицинская система получения изображений по п. 3, в которой дополнительный и вторичный блоки получения изображений выполнены с возможностью обнаружения положения заданного характерного или фидуциарного признака (30) на объекте, причем положение вторичного блока получения изображений получают из относительных положений, заданных характерных или фидуциарных признаков в первых и вторых данных оптического изображения.
5. Медицинская система получения изображений по п. 1, в которой первичный блок (13) получения изображений содержит датчик положения для контроля положения вторичного блока (15) получения изображений.
6. Медицинская система получения изображений по п. 1, в которой опорным положением является положение самого первичного блока получения изображений.
7. Медицинская система получения изображений по п. 1, в которой, когда первичный блок (13) получения изображений находится в режиме получения изображений, текущие данные изображения первичного блока (13) получения изображений и текущие данные изображения вторичного блока (15) получения изображений объединяются.
8. Медицинская система получения изображений по п. 1, в которой, когда первичный блок (13) получения изображений находится в режиме парковки, ранее полученные данные изображения первичного блока (13) получения изображений и текущие данные изображения вторичного блока (15) получения изображений объединяются.
9. Медицинская система получения изображений по п. 1, в которой первичный блок (13) получения изображений выполнен с возможностью слежения по меньшей мере за первым объектом, являющимся пациентом или медицинским инструментом, а вторичный блок (15) получения изображений выполнен с возможностью слежения по меньшей мере за вторым объектом, являющимся пациентом или медицинским инструментом.
10. Медицинская система получения изображений по п. 1, в которой второй блок получения изображений дополнительно содержит хирургическую подсветку.
11. Медицинская система получения изображений по п. 1, в которой вторичный блок (15) получения изображений, по меньшей мере, временно фиксированно крепится к основанию объекта.
12. Медицинская система получения изображений по п. 1, в которой первичный блок (13) получения изображений снабжен датчиком перемещения для обнаружения перемещений вторичного блока (15) получения изображений.
13. Способ (100) слежения за объектом для медицинской системы получения изображений, для слежения за заданным подвижным объектом, причем упомянутый способ содержит следующие этапы, на которых:
a) обеспечивают (102) данные изображения тела пациента посредством первичного блока (13) получения изображений, который может перемещаться между режимом получения изображений и режимом парковки,
b) обеспечивают (104) данные изображения тела пациента посредством вторичного блока (15) получения изображений, и
c) определяют (106) посредством первичного блока (13) получения изображений положение вторичного блока (15) получения изображений относительно опорного положения, и
d) следят (108) за заданным подвижным объектом:
в режиме получения изображений, основываясь на получении изображений первичным блоком (13) получения изображений, и
в режиме парковки, основываясь на получении изображений вторичным блоком (15) получения изображений.
14. Компьютерно-читаемый носитель, на котором хранится элемент компьютерной программы управления устройством по одному из пп. 1-12, который при выполнении модулем обработки выполнен с возможностью исполнения этапов способа по п. 13.
| US 2008199059 A1, 21.08.2008 | |||
| US 2009195249 A1, 06.08.2009 | |||
| WO 2007115825 A1, 18.10.2007 | |||
| DE 102008050572 A1, 15.04.2010. |

