УРОВЕНЬ ТЕХНИКИ
[0001] В аэрокосмической промышленности или в области эксплуатации винтокрылых летательных аппаратов, соосные винты имеют возможность обеспечить контроль угла рыскания путем изменения равновесия крутящего момента между отдельными несущими винтами. Уравновешивание крутящего момента может быть достигнуто за счет применения и использования дифференциально отклоняемой ручки «шаг-газ». Известным недостатком соосной конфигурации является падение и в конечном итоге нивелирование эффективности органа управления, представленного дифференциально отклоняемой ручкой «шаг-газ» при работе в одной или нескольких областях режимов полета, например, в условиях снижения на умеренных скоростях. Для компенсации такого падения /нивелирования могут применяться очень большие рули направления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0002] Примерный вариант осуществления изобретения направлен на способ, включающий определение, посредством вычислительного устройства, содержащего процессор, значения по меньшей мере одного параметра, связанного с работой вертолета с соосными винтами; обработку, посредством вычислительного устройства, по меньшей мере одного параметра для определения мощности управления, доступной на одном или более средствах управления полетом, включая дифференциально отклоняемую ручку управления; и установку, посредством вычислительного устройства, значения для дифференциально отклоняемой ручки управления для образования чистого момента рыскания для вертолета с соосными винтами на основе определения доступной мощности управления.
[0003] Другой примерный вариант осуществления изобретения направлен на устройство, содержащее по меньшей мере один процессор; и запоминающее устройство, содержащее команды, сохраненные в нем, которые при выполнении по меньшей мере одним процессором, побуждают устройство: определять значения по меньшей мере одного параметра, связанного с работой вертолета с соосными винтами, обрабатывать по меньшей мере один параметр для определения мощности управления, доступной на одном или более средствах управления полетом, включая дифференциально отклоняемую ручки управления, и установить, посредством вычислительного устройства, значение для дифференциально отклоняемой ручки управления для образования чистого момента рыскания для вертолета с соосными винтами на основе определения доступной мощности управления.
[0004] Другой примерный вариант осуществления изобретения направлен на вертолет с соосными винтами, содержащий: первый несущий винт, установленный соосно со вторым несущим винтом в качестве соосной конфигурации; датчики, соединенные с первым и вторым несущими винтами; и вычислительное устройство, соединенное с датчиками, и выполненное с возможностью: обработки данных, предоставляемых датчиками для определения мощности управления, доступной на одном или более средствах управления полетом, включая дифференциально отклоняемую ручку управления, и установки, посредством вычислительного устройства, значения для дифференциально отклоняемой ручки управления для образования чистого момента рыскания для вертолета с соосными винтами на основе определения доступной мощности управления.
[0005] Дополнительные варианты осуществления изобретения описаны ниже.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0006] Настоящее изобретение иллюстрируется в качестве примера и не ограничивается прилагаемыми графическими материалами, на которых одинаковые позиционные обозначения указывают на аналогичные элементы.
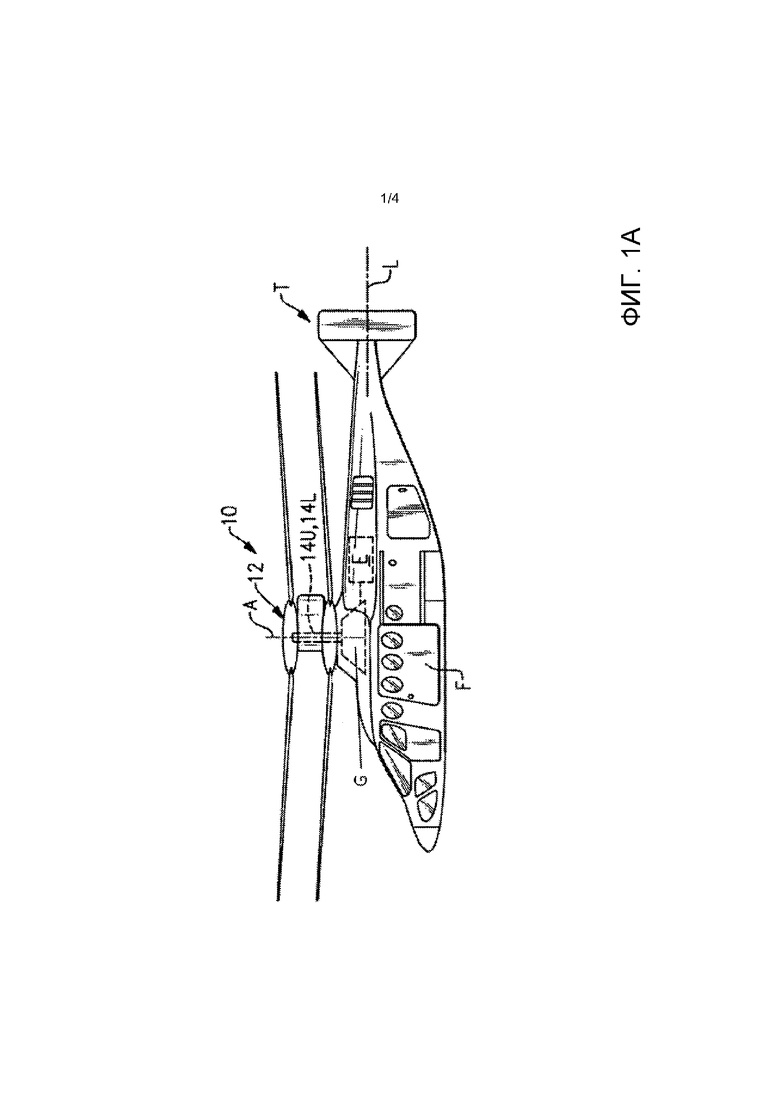
[0007] ФИГ.1A представляет собой общий вид в перспективе сбоку примерного вертолета с соосными винтами;
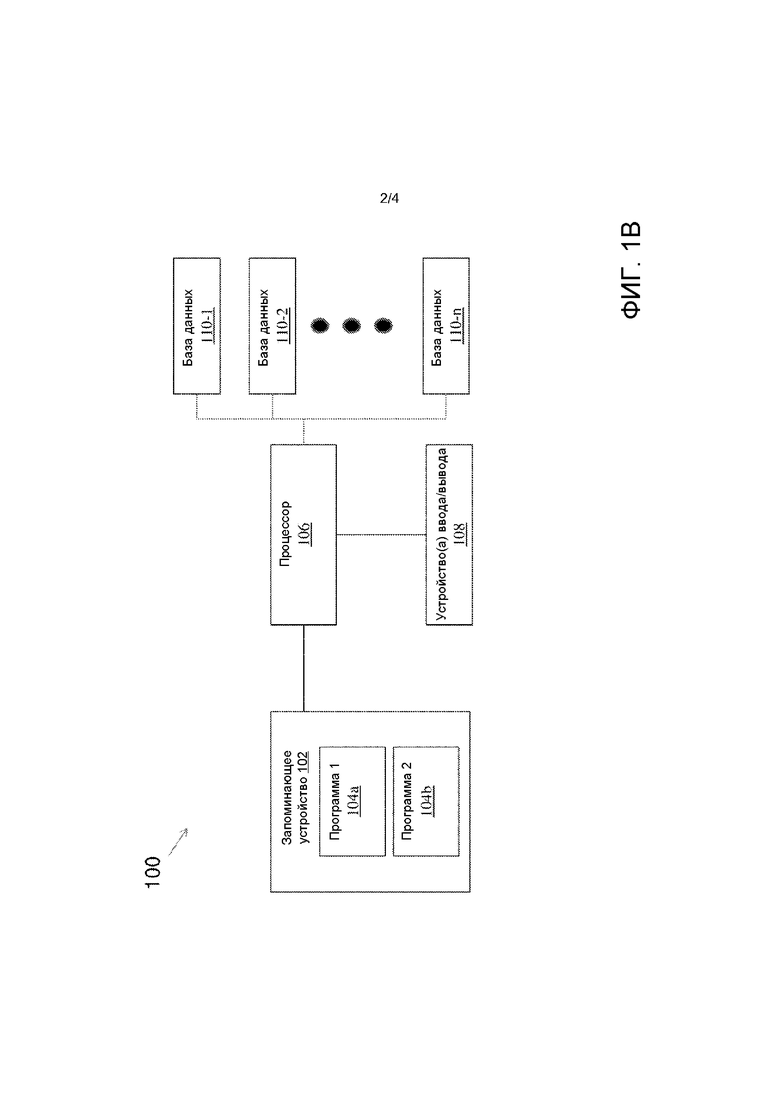
[0008] ФИГ.1В представляет собой блок-схему, иллюстрирующую типовую вычислительную систему;
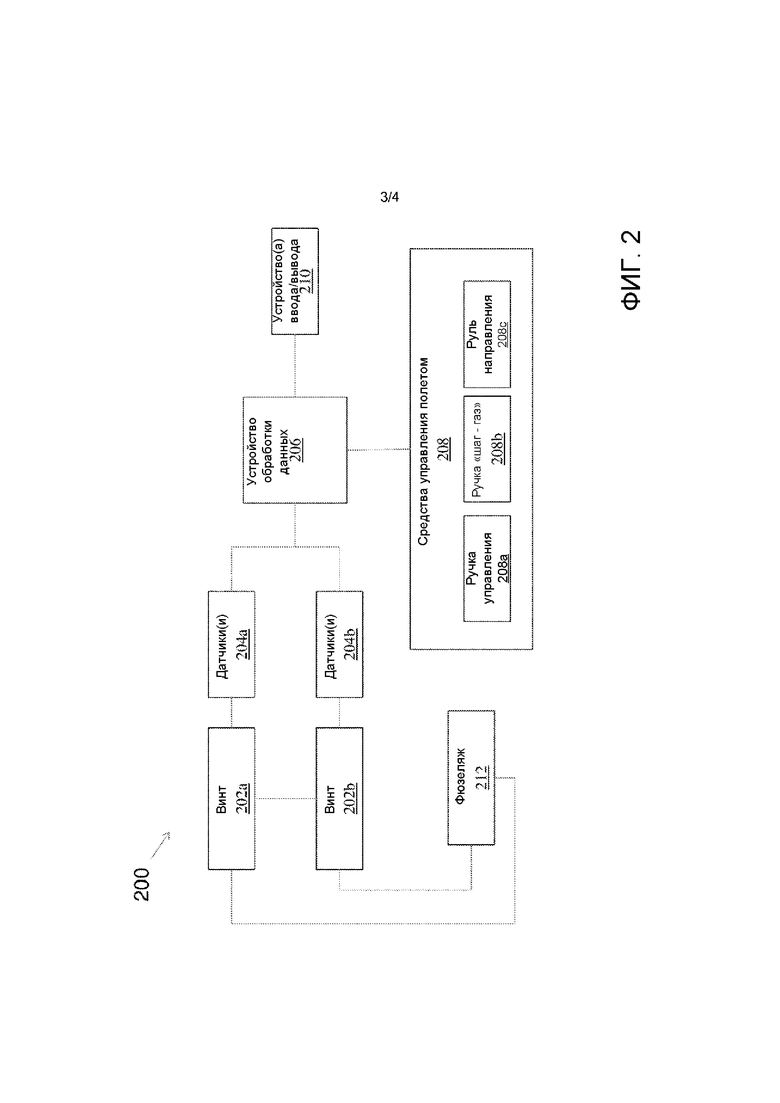
[0009] ФИГ.2 представляет собой блок-схему примерного системного окружения; и
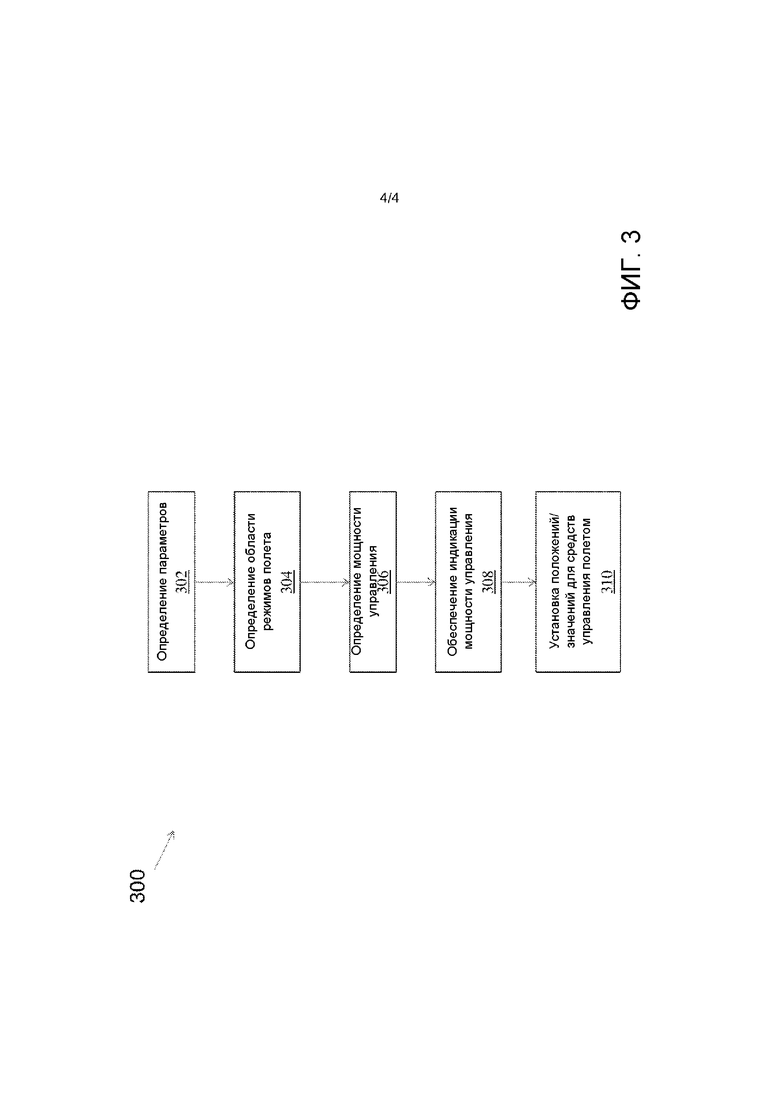
[0010] ФИГ.3 иллюстрирует блок-схему последовательности операций иллюстративного способа.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0011] Следует отметить, что в последующем описании и на графических материалах представлены различные связи между элементами (содержание которых включено в данном описании в качестве ссылки). Следует отметить, что эти связи в целом, и, если не указано иное, могут быть прямыми или косвенными, и что это описание не претендует на то, чтобы быть ограничивающим в этом отношении. В этом отношении связь между элементами может означать либо прямую, либо косвенную связь.
[0012] Примерные варианты осуществления аппаратных средств, систем и способов описаны для создания чистого момента рыскания для летательного аппарата. В некоторых вариантах осуществления изобретения, для создания чистого момента рыскания может применяться дифференциально отклоняемая ручка управления. Фазирование дифференциально отклоняемой ручки управления может зависеть от направления ветра по отношению к ориентации или направлению движения летательного аппарата. Мощность руля управления рыскания может быть относительно устойчивой или постоянной в диапазоне от, например, тридцати семи км/ч (двадцати узлов) до ста сорока восьми км/ч (восьмидесяти узлов), в том числе во время снижения, где управление с применением дифференциально отклоняемой ручки «шаг-газ» может быть потеряно. В некоторых вариантах осуществления изобретения, эмпирическая модель может быть применена для оценки мощности управления рысканием, доступной для дифференциально отклоняемой ручки «шаг-газ» или других средств управления рысканием. Эта информация может быть использована для ориентирования пилота и/или перенастройки средств управления полетом.
[0013] ФИГ. 1А иллюстрирует пример вертолета вертикального взлета и посадки (VTOL) с соосными винтами 10, имеющего двойную главную винтовую систему 12 с вращением в противоположном направлении, которая вращается вокруг вращающегося главного вала винта 14U и вращающегося в обратном направлении основного вала винта 14L, оба вращаются вокруг оси вращения А. Летательный аппарат 10 содержит фюзеляж F, на котором крепится двойная соосная винтовая система с вращением в противоположных направлениях 12, а также дополнительная силовая установка поступательного движения Т, которая обеспечивает поступательную тягу во время горизонтального полета с высокой скоростью, как правило, параллельно к продольной оси L летательного аппарата. Хотя конкретная конфигурация вертолета с соосными винтами, вращающимися в противоположном направлении, проиллюстрирована в раскрытом здесь варианте осуществления изобретения, другие винтовые системы и другие типы летательных аппаратов, такие как летательные аппараты с поворотным крылом и с поворотным винтом, также извлекут пользу от настоящего изобретения.
[0014] Основная коробка передач G, расположенная над кабиной летательного аппарата, приводит в движение винтовую систему 12. Силовая установку поступательного движения Т может приводиться в движение той же основной коробкой передач G, которая приводит в движение винтовую системы 12. Основная коробка передач G приводится в движение одним или несколькими двигателями Е. Как проиллюстрировано, основная коробка передач G может быть размещена между двигателями Е, винтовой системой 12, и силовой установкой поступательного движения Т.
[0015] Со ссылкой на Фиг. 1B, проиллюстрирована типовая вычислительная система 100. Вычислительная система 100 может быть частью системы управления полетом вертолета 10. Система 100 проиллюстрирована, как содержащая запоминающее устройство 102. Запоминающее устройство 102 может хранить исполняемые команды. Исполняемые команды могут храниться или могут быть организованы в любой форме и на любом уровне абстракции, например, в соединении с одним или более приложениями, процессами, методами, процедурами, способами и т.д. В качестве примера, по меньшей мере часть команд проиллюстрирована на ФИГ. 1В, ассоциируемая как с первой программой 104а, так и со второй программой 104b.
[0016] Команды, хранящиеся в памяти 102, могут быть выполнены посредством одного или более процессоров, таких как процессор 106. Процессор 106 может быть присоединен к одному или нескольким устройствам ввода/вывода (I/O) 108. В некоторых ручку управления, джойстик вариантах осуществления изобретения, устройство (а) ввода/вывода 108 может содержать одну или более клавиатур или кнопочных панелей, сенсорный экран или сенсорную панель, экран дисплея, микрофон, динамик, мышь, кнопку активации, пульт дистанционного управления,, принтер, телефон или мобильное устройство (например, смартфон) и т.д. Устройство (а) ввода/вывода 108 может быть сконфигурировано с возможностью обеспечения интерфейса, позволяющего пользователю взаимодействовать с системой 100.
[0017] Как проиллюстрировано, процессор 106 может быть подключен к n-ому числу баз данных, 110-1, 110-2, … 110-n. Базы данных 110 могут применяться для хранения данных. В некоторых вариантах осуществления изобретения данные могут содержать один или несколько параметров, связанных с работой летательного аппарата (например, вертолета с соосными винтами). Например, данные могут включать содержать один или более параметров, относящихся к скорости полета, мощности, подаваемой на один или несколько несущих винтов, тяга несущего винта, скорость снижения и скорость подъема, и угол атаки. Процессор 106 может работать на основании данных и определять или прогнозировать мощность управления, доступную на одном или нескольких средств управления полетом.
[0018] Система 100 является иллюстративной. В некоторых вариантах осуществления изобретения один или более элементов могут быть представлены как дополнительные. В некоторых вариантах осуществления изобретения могут быть включены не проиллюстрированные дополнительные элементы. В некоторых вариантах осуществления изобретения элементы могут располагаться или быть организованы способом, отличным от того, как проиллюстрировано на ФИГ. 1B. Например, в некоторых вариантах осуществления изобретения запоминающее устройство 102 может быть подключено к или скомбинировано с одной или несколькими из баз данных 110.
[0019] Со ссылкой на ФИГ. 2 проиллюстрирована блок-схема системы 200. Система 200 может быть применена для определения или прогнозирования мощности управления, которая может быть доступна. В некоторых вариантах осуществления изобретения система 200 может быть применена в качестве основной для обеспечения управления углом рыскания вертолета 10. Система 200 может быть включена как часть вертолета 10.
[0020] Система 200 проиллюстрирована как содержащая несущий винт 202a и несущий винт 202b. Несущие винты 202а и 202b могут быть присоединены друг к другу соосно.
[0021] Несущие винты 202а и 202b могут быть присоединены к одному или более датчикам. Например, как проиллюстрировано на ФИГ. 2, несущий винт 202a может быть присоединен к одному или более датчикам 204а. Несущий винт 202b может быть присоединен к одному или более датчикам 204b. В некоторых вариантах осуществления изобретения по меньшей мере часть датчиков 204а могут быть общими для соответствующей части датчиков 204b. Датчики 204a и/или 204b могут быть сконфигурированы для измерения одного или нескольких параметров, таких, как те, которые описаны в настоящем документе.
[0022] Датчик (и) 204а и 204b могут быть присоединены к устройству обработки данных 206. Устройство обработки данных 206 может соответствовать процессору 106. Устройство обработки данных 206 может соответствовать вычислительной системе управления полетом.
[0023] Устройство обработки данных 206 может оперировать данными, предоставленными датчиком (ами) 204а и 204b. Устройство обработки данных 206 может обрабатывать данные, предоставляемые датчиком (ами) 204а и 204b для определения или прогнозирования мощности управления, которая может быть доступна на одном или более средствах управления полетом 208. В некоторых вариантах осуществления изобретения определение/прогнозирование мощности управления может быть выполнено посредством устройства обработки данных 206 для одного или более устройств ввода/вывода 210 (где устройства ввода/вывода 210 могут соответствовать устройствам ввода/вывода 108). В некоторых вариантах осуществления изобретения, определение/прогнозирование мощности управления может быть основано на фактических значениях или положениях средств управления полетом 208 и/или может быть основано на диапазоне возможных значений/положений для средств управления полетом 208.
[0024] Средства управления полетом 208 могут включать ручку управления 208a, ручку «шаг-газ» 208b и руль управления 208c. Хотя каждое из средств управления 208а-208c проиллюстрировано на ФИГ. 2 как единое целое, несколько вариантов одного или нескольких средств управления 208а-208c могут быть использованы в некоторых вариантах осуществления изобретения. Например, два варианта ручки управление 208а и ручки «шаг-газ» 208b могут быть доступны, так что первый вариант ручки управления 208а и ручки «шаг-газ» 208b может быть применен к винту 202а, а второй вариант ручки управления 208а и ручки «шаг-газ» 208b может быть применен к винту 202b. Кроме того, средства управления полетом 208a-208c могут быть выражены в виде дифференциальных величин. Например, дифференциально отклоняемая ручка управления может соответствовать разнице между несущим винтом 202а и несущим винтом 202b относительно ручки управления 208а.
[0025] В некоторых вариантах осуществления изобретения на основе определения/прогнозирования мощности управления, выполняемого устройством обработки данных 206, может быть обеспечено значение, или положение для одного или нескольких средств управления полетом 208. Например, значение или положение для средств управления полетом 208 может регулироваться автоматически. Такая автоматическая настройка может быть применена, например, в конфигурации с электродистанционным управлением. В качестве альтернативы, выходной сигнал, получаемый из устройства ввода/вывода 210, может указать пилоту или оператору изменить состояние для одного или нескольких средств управления полетом 208. Выходной сигнал, получаемый из устройства ввода/вывода 210, может указать пилоту/оператору приемлемый диапазон для изменения одного или нескольких средств управления полетом 208, на основании, например, области режимов полета, в которой эксплуатируется летательный аппарат.
[0026] На основе по меньшей мере частично состояния средств управления полетом 208, (дифференциальный) момент может быть сгенерирован между винтами 202а и 202b. Этот момент может быть привязан к фюзеляжу 212. Момент может соответствовать разбалансировке в крутящем моменте, который может быть приспособлен или использован для получения угла рыскания для летательного аппарата.
[0027] Обращаясь к ФИГ. 3, здесь проиллюстрирована блок-схема примерного способа 300. Способ 300 может быть реализован посредством одной или нескольких систем, компонентов или устройств, таких как те, что описаны в настоящем описании (например, система 100 и/или система 200). Способ 300 может использоваться для обеспечения управления углом рыскания вертолета, такого как вертолет с соосными винтами. Способ 300 может быть применен для генерирования индикации или определения мощности управления, и может обеспечивать выходной сигнал относительно положений для одного или более средств управления полетом.
[0028] В блоке 302, один или более параметров (например, скорость полета, мощность, подаваемая на один или несколько несущих винтов, тяга несущего винта, скорость снижения и скорость подъема, а также угол атаки) могут быть определены, приняты, или измерены.
[0029] В блоке 304, параметры блока 302 могут быть обработаны для определения области режимов полета, в которой эксплуатируется летательный аппарат. Например, индикация блока 304 может указывать, что летательный аппарат снижается и движется со скоростью примерно от пятидесяти пяти до семидесяти четырех км/ч (от тридцати до сорока узлов), при этом управление углом рыскания, обеспечиваемое дифференциально отклоняемой ручкой «шаг-газ» между соосными винтами и/или рулем направления может быть ограничено. Области эксплуатации в пределах режимов полета могут быть установлены на основе результатов моделирования или посредством использования данных летных испытаний.
[0030] В блоке 306, может быть определена мощность управления, которая может быть доступна путем применения одного или нескольких средств управления полетом (например, дифференциально отклоняемой ручки «шаг-газ» и/или руля направления). Индикация блока 306 может быть основана на параметрах блока 302 и/или области режимов полета, определяемой в блоке 304.
[0031] В блоке 308 может быть обеспечена индикация мощности управления блока 306. Например, один или несколько аудио или отображаемых выходов могут служить для информирования пилота о доступной мощности управления. Пилот может назначить значения или положения для средств управления полетом на основании указанной мощности управления.
[0032] В блоке 310, может быть установлено одно или несколько значений или положений для средств управления полетом. Значения/положения могут быть установлены автоматически. В качестве альтернативы, значения/положения могут быть установлены вручную (например, посредством ручного управления). В рамках блока 310, оптимальная стратегия применения имеющихся средств управления полетом может быть применена для образования чистого момента рыскания, который может быть использован в качестве основы для обеспечения управления углом рыскания летательного аппарата. Эта стратегия управления может предполагать применение дифференциально отклоняемой ручки управления для образования чистого момента рыскания. Процесс оптимизации может даже автоматически инвертировать направление применения средств управления, таких как дифференциально отклоняемая ручка «шаг-газ» и рули направления, в режимах полета, где степень влияния момента рыскания инвертируется.
[0033] Способ 300 является иллюстративным. В некоторых вариантах осуществления изобретения один или более из блоков или операций (или их часть) могут быть необязательными. В некоторых вариантах осуществления изобретения могут быть включены дополнительные операции, которые не показаны. В некоторых вариантах осуществления изобретения операции могут выполняться в порядке или последовательности, отличными от того, как проиллюстрировано на ФИГ. 3.
[0034] Варианты осуществления изобретения могут быть применены для уменьшения размера рулей направления по отношению к летательным аппаратам, используемых в настоящее время. Дифференциально отклоняемая ручка управления может быть применена для обеспечения управления углом рыскания.
[0035] Варианты осуществления изобретения могут быть использованы для обеспечения управления углом рыскания без добавления значительной сложности к конструкции или основе летательного аппарата. Аспекты настоящего изобретения могут быть использованы для повышения ситуационной осведомленности и/или увеличения степени устойчивости, связанной со средствами управления полетом.
[0036] Как описано здесь, в некоторых вариантах осуществления изобретения различные функции или действия могут иметь место в данном месте и/или в связи с функционированием одного или нескольких приборов, систем или устройств. Например, в некоторых вариантах осуществления изобретения, часть заданной функции или действия может быть выполнены на первом устройстве или месте, а оставшаяся часть функции или действия может быть выполнены в одном или более дополнительных устройствах или местах.
[0037] Варианты осуществления изобретения могут быть реализованы с использованием одной или нескольких технологий. В некоторых вариантах осуществления изобретения, прибор или система могут содержать один или несколько процессоров, а также запоминающее устройство, хранящее команды, которые, при их выполнении одним или несколькими процессорами, вызывают в приборе или системе выполнение одного или более методологических действий, как описано в настоящем документе. Различные механические компоненты, известные специалистам в данной области техники, могут быть использованы в некоторых вариантах осуществления изобретения.
[0038] Варианты осуществления изобретения могут быть реализованы в качестве одного или нескольких приборов, систем и/или способов. В некоторых вариантах осуществления изобретения, команды могут храниться в одном или более машиночитаемых носителях, таких как энергозависимый и/или энергонезависимый машиночитаемый носитель. Команды, при их выполнении, могут вызвать в объекте (например, аппаратном средстве или системе) выполнение одного или более методологических действий, как описано в настоящем документе.
[0039] Аспекты настоящего изобретения были описаны в виде их иллюстративных вариантов осуществления изобретения. Многочисленные другие варианты осуществления изобретения, модификации и варианты в пределах объема и сущности прилагаемой формулы изобретения будут очевидны специалистам в данной области техники исходя из рассмотрения настоящего описания. Например, специалисту в данной области техники будет понятно, что этапы, описанные в сочетании с иллюстративными фигурами, могут быть выполнены в другом порядке, чем в изложении, и что один или несколько этапов, проиллюстрированных в данном документе, могут быть необязательными.
Способ посредством вычислительного устройства, содержащего процессор, включает определение значения по меньшей мере для одного параметра, относящегося к эксплуатации вертолета с соосными винтами; определение области режимов полета, в которой эксплуатируется вертолет; обработку по меньшей мере одного параметра для определения мощности управления, доступной на одном или более средствах управления полетом, включая дифференциально отклоняемую ручку управления; установку значения для дифференциально отклоняемой ручки управления для образования чистого момента рыскания для вертолета на основе определения доступной мощности управления. Вертолет содержит вычислительное устройство, выполненное с возможностью определения области режимов полета, обработки данных, установки значения для дифференциально отклоняемой ручки управления. 3 н. и 16 з.п. ф-лы, 4 ил.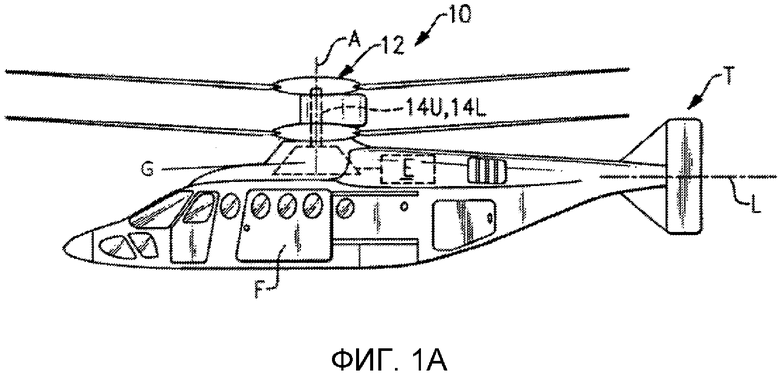
1. Способ управления углом рыскания, включающий:
определение посредством вычислительного устройства, содержащего процессор, значения по меньшей мере для одного параметра, относящегося к эксплуатации вертолета с соосными винтами, содержащего первый несущий винт и второй несущий винт, соединенные друг с другом соосно;
определение посредством вычислительного устройства области режимов полета, в которой эксплуатируется вертолет, причем определение области режимов полета показывает, что управление углом рыскания, обеспечиваемое дифференциально отклоняемой ручкой «шаг-газ» на первый и второй несущие винты и рулем направления, ограничено;
обработку посредством вычислительного устройства по меньшей мере одного параметра для определения мощности управления, доступной на одном или более средствах управления полетом, включая дифференциально отклоняемую ручку управления; и
установку посредством вычислительного устройства значения для дифференциально отклоняемой ручки управления для образования чистого момента рыскания для вертолета с соосными винтами на основе определения доступной мощности управления.
2. Способ по п.1, отличающийся тем, что по меньшей мере один параметр включает по меньшей мере одно из: воздушной скорости, мощности, подаваемой на несущие винты, тяги несущего винта, скорости снижения, скорости подъема и угла атаки.
3. Способ по п.1, отличающийся тем, что значение по меньшей мере для одного параметра получено от датчика.
4. Способ по п.1, отличающийся тем, что значение для дифференциально отклоняемой ручки управления основано на области режимов полета.
5. Способ по п.4, отличающийся тем, что область режимов полета определяется на основе моделирования.
6. Способ по п.4, отличающийся тем, что область режимов полета определяется на основе данных летных испытаний.
7. Способ по п.1, дополнительно включающий:
установку значения для дифференциально отклоняемой ручки управления.
8. Способ по п.7, отличающийся тем, что значение устанавливается посредством вычислительного устройства.
9. Способ по п.7, отличающийся тем, что значение устанавливается посредством устройства ручного управления.
10. Способ по п.1, дополнительно включающий:
установку посредством вычислительного устройства значения по меньшей мере для одного: руля направления и дифференциально отклоняемой ручки «шаг-газ», основанного на определении доступной мощности управления.
11. Устройство управления углом рыскания, содержащее:
по меньшей мере один процессор и
запоминающее устройство, содержащее команды, сохраненные в нем, которые при выполнении по меньшей мере одним процессором побуждают устройство:
определить область режимов полета, в которой эксплуатируется вертолет, причем определение области режимов полета показывает, что управление углом рыскания, обеспечиваемое дифференциально отклоняемой ручкой «шаг-газ» на первый и второй несущие винты и рулем направления, ограничено,
определить значение по меньшей мере для одного параметра, связанного с эксплуатацией вертолета с соосными винтами,
обработать по меньшей мере один параметр для определения мощности управления, доступной на одном или более средствах управления полетом, включая дифференциально отклоняемую ручку управления, и
установить значение для дифференциально отклоняемой ручки управления для образования чистого момента рыскания вертолета на основе определения доступной мощности управления.
12. Устройство по п.11, отличающееся тем, что по меньшей мере один параметр включает по меньшей мере два параметра, выбранные из следующих: воздушной скорости, мощности, подаваемой на несущие винты, тяги несущего винта, скорости снижения, скорости подъема и угла атаки.
13. Устройство по п.11, отличающееся тем, что значение для дифференциально отклоняемой ручки управления основывается на области режимов полета.
14. Устройство по п.13, отличающееся тем, что область режимов полета определяется на основании по меньшей мере одного из: моделирования и данных летных испытаний.
15. Устройство по п.11, отличающееся тем, что команды при их выполнении по меньшей мере одним процессором побуждают устройство:
установить значение для дифференциально отклоняемой ручки управления.
16. Устройство по п.11, отличающееся тем, что команды при выполнении по меньшей мере одним процессором побуждают устройство:
установить значение для руля направления и дифференциально отклоняемой ручки «шаг-газ», основанное на определении доступной мощности управления.
17. Вертолет, содержащий:
первый несущий винт, установленный соосно со вторым несущим винтом в качестве части соосной конфигурации;
датчики, соединенные с первым и вторым несущими винтами; и
вычислительное устройство, соединенное с датчиками и выполненное с возможностью:
определения области режимов полета, в которой эксплуатируется вертолет, причем определение области режимов полета показывает, что управление углом рыскания, обеспечиваемое дифференциально отклоняемой ручкой «шаг-газ» на первый и второй несущие винты и рулем направления, ограничено,
обработки данных, предоставляемых датчиками для определения мощности управления, доступного на одном или более средствах управления полетом, включая дифференциально отклоняемую ручку управления, и
установки значения для дифференциально отклоняемой ручки управления для образования чистого момента рыскания для вертолета на основе определения доступной мощности управления.
18. Вертолет по п.17, дополнительно содержащий:
устройство отображения, подключенное к вычислительному устройству и выполненное с возможностью отображения по меньшей мере одного из: доступной мощности управления, значения для дифференциально отклоняемой ручки управления, и области режимов полета, в которой эксплуатируется вертолет.
19. Вертолет по п.17, отличающийся тем, что вычислительное устройство выполнено с возможностью установки значения для дифференциально отклоняемой ручки управления.
| US 7083142 B2, 01.08.2006 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 8456328 B2, 04.06.2013 | |||
| US 6735500 B2, 11.05.2004 | |||
| Теплоизоляционный композиционный материал на основе костры технической конопли | 2024 |
|
RU2835331C1 |

